Passive Multiple Target Indoor Localization Based on Joint Interference Cancellation in an RFID System



Abstract
:1. Introduction
2. Signal Extraction and Modeling
3. Proposed Method
3.1. Spatial Spectrum Calculation
3.2. Avoiding the Limitation of Array Aperture
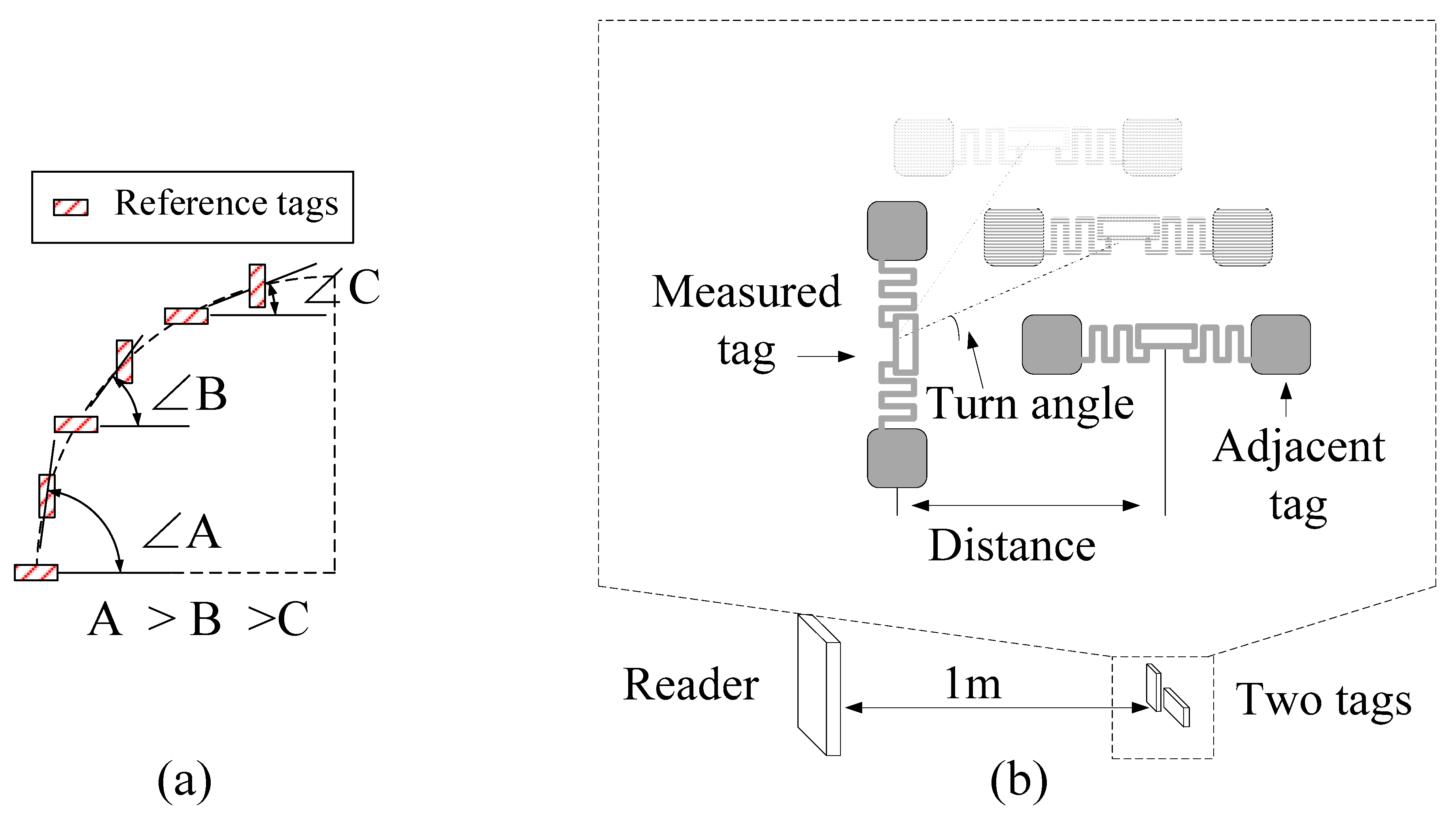
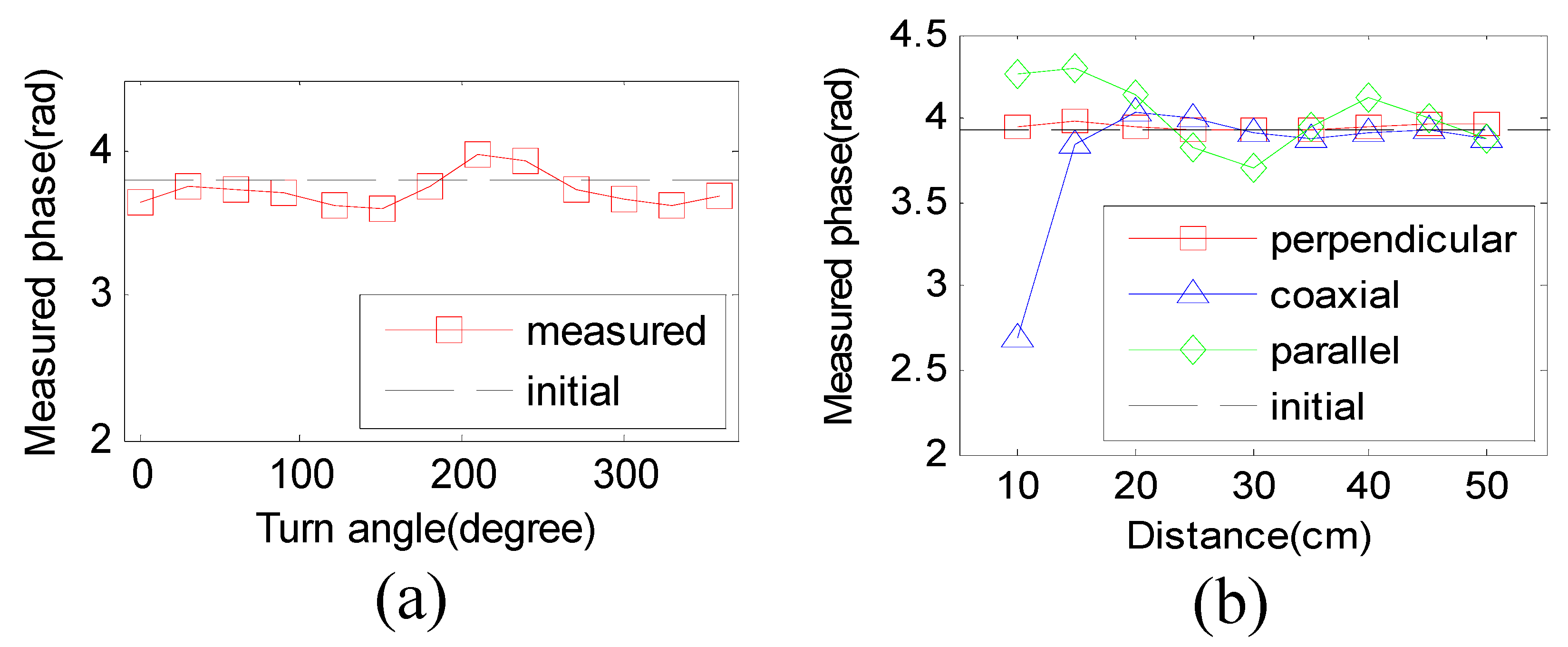
3.3. Avoiding the Effect of Mutual Coupling
3.4. Signal Model Modification
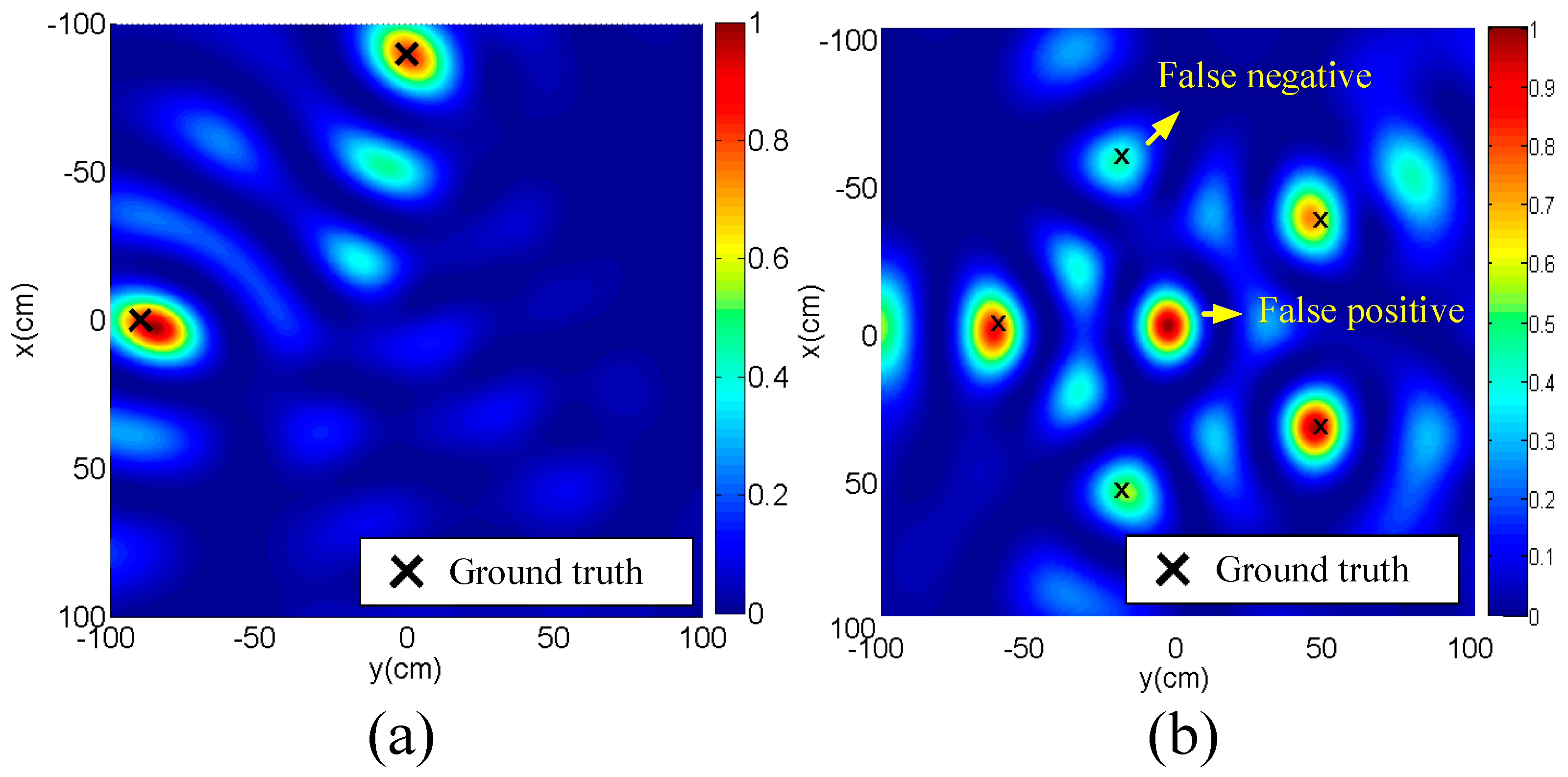
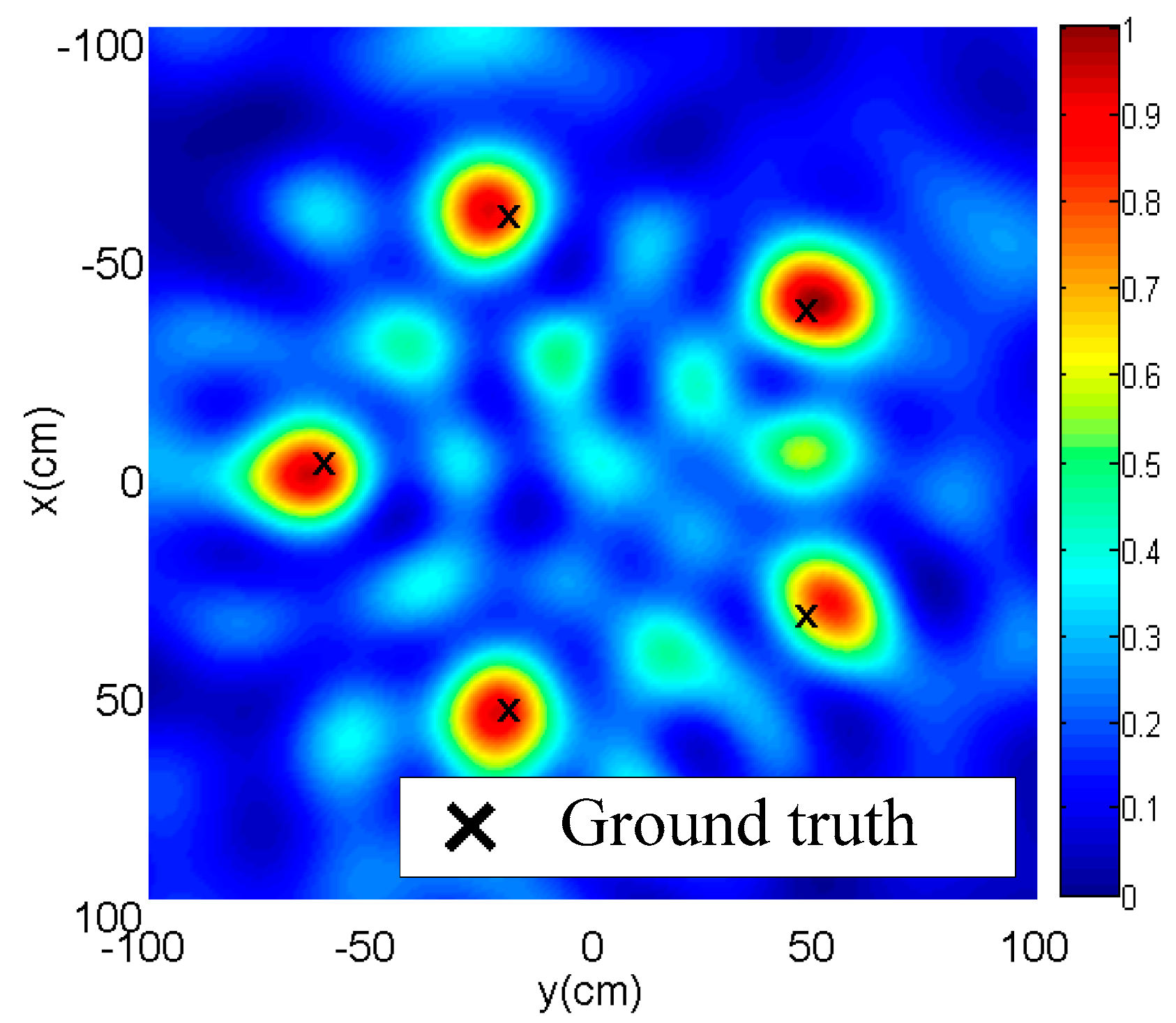
3.5. Avoiding the Effect of Interference of Targets
4. Results and Evaluation
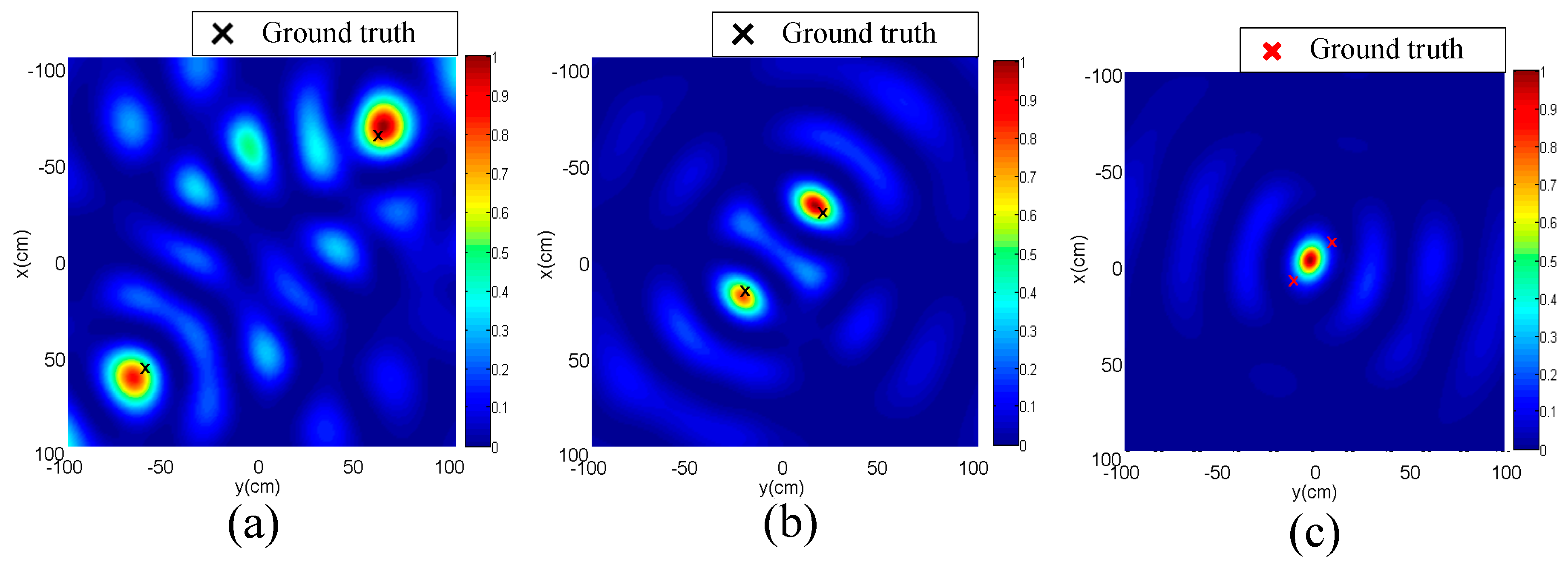
4.1. Two-Dimensional Localization Measurements
4.2. Localization Accuracy of Different Number of Targets
4.3. Range of Detection
4.4. Multiple Target Spatial Resolution
4.5. Impact of Reference Tags
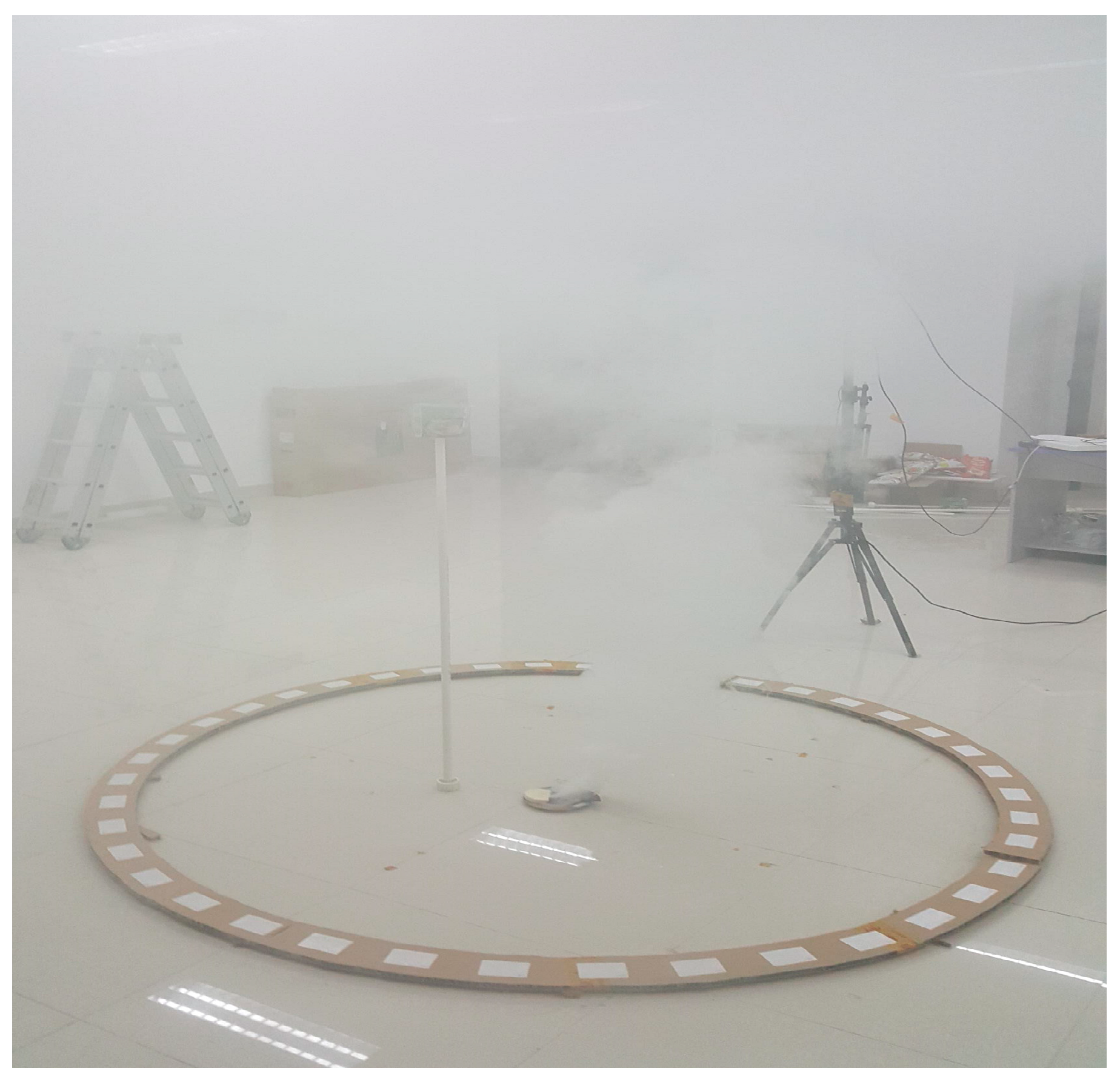
4.6. The Results in Smoky Environment
4.7. Comparison with Recent Works
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pastina, D.; Colone, F.; Martelli, T.; Falcone, P. Parasitic Exploitation of Wi-Fi Signals for Indoor Radar Surveillance. IEEE Trans. Veh. Technol. 2015, 64, 1401–1415. [Google Scholar] [CrossRef]
- Shi, S.; Sigg, S.; Chen, L.; Ji, Y. Accurate Location Tracking From CSI-Based Passive Device-Free Probabilistic Fingerprinting. IEEE Trans. Veh. Technol. 2018, 67, 5217–5230. [Google Scholar] [CrossRef]
- Luo, C.; Cheng, L.; Chan, M.C.; Gu, Y.; Li, J.; Pallas, Z.M. Self-Bootstrapping Fine-Grained Passive Indoor Localization Using WiFi Monitors. IEEE Trans. Mob. Comput. 2017, 16, 466–481. [Google Scholar] [CrossRef]
- Vega, M.T.; Kooonen, A.M.J.; Liotta, A.; Famaey, J. Fast Millimeter Wave Assisted Beam-Steering for Passive Indoor Optical Wireless Networks. IEEE Wirel. Commun. Lett. 2018, 7, 278–281. [Google Scholar] [CrossRef]
- Han, J.; Qian, C.; Wang, X.; Ma, D.; Zhao, J.; Xi, W.; Jiang, Z.; Wang, Z. Twins: Device-free object tracking using passive tags. IEEE/ACM Trans. Netw. 2016, 24, 1605–1617. [Google Scholar] [CrossRef]
- Zhang, D.; Jingyu, Z.; Minyi, G.; Jiannong, C.; Tianbao, L. TASA: Tag-free activeity sensing using RFID tag arrays. IEEE Trans. Parallel Distrib. Syst. 2011, 22, 558–570. [Google Scholar] [CrossRef]
- Zhou, C.; Griffin, J.D. Accurate phase-based ranging measurements for backscatter RFID tags. IEEE Antennas Wirel. Propag. 2012, 11, 152–155. [Google Scholar] [CrossRef]
- Yang, P.; Wu, W. Efficient particle filter localization algorithm in dense passive RFID tag environment. IEEE Trans. Ind. Electron. 2014, 61, 5641–5651. [Google Scholar] [CrossRef]
- Yang, L.; Chen, Y.; Li, X.; Xiao, C.; Li, M.; Liu, Y. Tagoram: Real-time tracking of mobile RFID tags to high precision using COTS devices. In Proceedings of the 20th annual international conference on Mobile computing and networking, Maui, HI, USA, 7–11 September 2014; pp. 237–248. [Google Scholar]
- Wu, H.; Yang, J.; Chen, F. Source number estimators using transformed Gerschgorin radii. IEEE Trans. Signal Process. 1995, 43, 1325–1333. [Google Scholar]
- Pham, G.; Loubaton, P.; Vallet, P. Performance analysis of spatial smoothing schemes in the context of large arrays. IEEE Trans. Signal Process. 2016, 64, 160–172. [Google Scholar] [CrossRef]
- Peng, Z.; Ran, L.; Li, C. A K-band portable FMCW radar with beamforming array for short-range localization and vital-Doppler targets discrimination. IEEE Trans. Microw. Theory Tech. 2017, 65, 3443–3452. [Google Scholar] [CrossRef]
- Yan, J.; Pu, W.; Liu, H.; Jiu, B.; Bao, Z. Robust chance constrained power allocation scheme for multiple target localization in colocated MIMO radar system. IEEE Trans. Signal Process. 2018, 66, 3946–3957. [Google Scholar] [CrossRef]
- Basikolo, T.; Arai, H. APRD-MUSIC algorithm DOA estimation for reactance based uniform circular array. IEEE Trans. Antennas Propag. 2018, 66, 4976–4985. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Doğançay, K. Optimal geometry analysis for multistatic TOA localization. IEEE Trans. Signal Process. 2016, 64, 4180–4193. [Google Scholar] [CrossRef]
- Liang, J.; Leung, C.S.; So, H.C. Lagrange programming neural network approach for target localization in distributed MIMO radar. IEEE Trans. Signal Process. 2016, 64, 1574–1585. [Google Scholar] [CrossRef]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J. MIMO radar with widely separated antennas. IEEE Signal Process. Mag. 2018, 35, 16–27. [Google Scholar] [CrossRef]
- Li, X. RSS-based location estimation with unknown pathloss model. IEEE Trans. Wirel. Commun. 2006, 5, 3626–3633. [Google Scholar] [CrossRef]
- Wang, J.; Xiong, J.; Jiang, H.; Chen, X.; Fang, D. D-Watch: Embracing “bad” multipaths for device-free localization with COTS RFID devices. IEEE/ACM Trans. Netw. 2017, 25, 3559–3572. [Google Scholar] [CrossRef]
- Wilson, J.; Patwari, N. Radio tomographic imaging with wireless networks. IEEE. Trans. Mob. Comput. 2010, 9, 621–632. [Google Scholar] [CrossRef]
- Kaltiokallio, O.; Jantti, R.; Patwari, N. ARTI: An adaptive radio tomographic imaging system. IEEE Trans. Veh. Technol. 2017, 66, 7302–7316. [Google Scholar] [CrossRef]
- Patwari, N.; Agrawal, P. Effects of correlated shadowing: Connectivity localization and RF tomography. In Proceedings of the 7th International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA, 22–24 April 2018; pp. 82–93. [Google Scholar]
- Guo, Y.; Huang, K.; Jiang, N.; Guo, X.; Li, Y.; Wang, G. An exponential-Rayleigh model for RSS-based device-free localization and tracking. IEEE Trans. Mob. Comput. 2015, 3, 484–494. [Google Scholar] [CrossRef]
- Aditya, S.; Molisch, A.F.; Rabeah, N.; Behairy, H.M. Localization of multiple targets with identical radar signatures in multipath environments with correlated blocking. IEEE Trans. Wirel. Commun. 2018, 1, 606–618. [Google Scholar] [CrossRef]
- Yang, L.; Lin, Q.; Li, X.; Liu, T.; Liu, Y. See through walls with COTS RFID system. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 487–499. [Google Scholar]
- Liu, M.; Wang, H.; Yang, Y.; Zhang, Y.; Ma, L.; Wang, N. RFID 3-D indoor localization for tag and tag-free target based on interference. IEEE Trans. Instrum. Measurement. in press. [CrossRef]
- Ma, L.; Liu, M.; Wang, H.; Yang, Y.; Wang, N.; Zhang, Y. WallSense: Device-free indoor localization using wall-mounted UHF RFID tags. Sensors 2019, 19, 68. [Google Scholar] [CrossRef]
- Wang, J.; Fang, D.; Yang, Z.; Jiang, H.; Chen, X.; Xing, T.; Cai, L. E-HIPA: An energy-efficient framework for high-precision multi-target-adaptive device-free localization. IEEE Trans. Mob. Comput. 2016, 16, 716–729. [Google Scholar] [CrossRef]
- Liu, T.; Luo, X.; Liang, Z. Enhanced sparse representation-based device-free localization with radio tomography networks. J. Sen. Actuator Netw. 2016, 64, 1574–1585. [Google Scholar] [CrossRef]
- Savazzi, S.; Sigg, S.; Nicoli, M.; Rampa, V.; Kianoush, S.; Spagnolini, U. Device-free radio vision for assisted living: Leveraging wireless channel quality information for human sensing. IEEE Signal Process. Mag. 2018, 33, 45–48. [Google Scholar] [CrossRef]
- Dobkin, D.M. Radio basics for UHF RFID. The RF in RFID: Passive UHF RFID in Practice, 1st ed.; Newnes: Burlington, MA, USA, 2007; pp. 51–101. [Google Scholar]
- Buffi, A.; Pino, M.R.; Nepa, P. Experimental validation of a SAR-based RFID localization technique exploiting an automated handling system. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 2795–2798. [Google Scholar] [CrossRef]
- Ding, H.; Han, J.; Qian, C.; Xiao, F.; Wang, G.; Yang, N.; Xi, W.; Xiao, J. Trio: Utilizing tag interference for refined localization of passive RFID. In Proceedings of the IEEE INFOCOM, Honolulu, HI, USA, 16–19 October 2018; pp. 828–836. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target | ME (cm) | SD (cm) | RMSE (cm) |
|---|---|---|---|
| Instant Noodles | 2.3 | 1.8 | 3.9 |
| Cola | 3.2 | 3.7 | 6.4 |
| Mean | 2.8 | 2.8 | 5.2 |
| Target | ME (cm) | SD (cm) | RMSE (cm) | ATNE |
|---|---|---|---|---|
| Instant Noodles | 5.4 | 1.03 | 15.0 | 95% |
| Cola | 5.5 | 1.0 | 14.7 | 100% |
| Mean | 5.5 | 1.0 | 14.9 | 97.5% |
| Number of Reference Tags | 10 | 20 | 30 | 40 |
|---|---|---|---|---|
| Accuracy of target number estimation | 23% | 51% | 72% | 95% |
| Median error(cm) | 10.0 | 8.8 | 9.0 | 5.4 |
| Environment | Normal | Smoky |
|---|---|---|
| Accuracy of target number estimation | 100% | 100% |
| Median error(cm) | 1.9 | 2.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Ma, L.; Wang, N.; Zhang, Y.; Yang, Y.; Wang, H. Passive Multiple Target Indoor Localization Based on Joint Interference Cancellation in an RFID System. Electronics 2019, 8, 426. https://doi.org/10.3390/electronics8040426
Liu M, Ma L, Wang N, Zhang Y, Yang Y, Wang H. Passive Multiple Target Indoor Localization Based on Joint Interference Cancellation in an RFID System. Electronics. 2019; 8(4):426. https://doi.org/10.3390/electronics8040426
Chicago/Turabian StyleLiu, Meng, Liang Ma, Na Wang, Yajun Zhang, Yang Yang, and Hongjun Wang. 2019. "Passive Multiple Target Indoor Localization Based on Joint Interference Cancellation in an RFID System" Electronics 8, no. 4: 426. https://doi.org/10.3390/electronics8040426
APA StyleLiu, M., Ma, L., Wang, N., Zhang, Y., Yang, Y., & Wang, H. (2019). Passive Multiple Target Indoor Localization Based on Joint Interference Cancellation in an RFID System. Electronics, 8(4), 426. https://doi.org/10.3390/electronics8040426