A MPC Strategy for the Optimal Management of Microgrids Based on Evolutionary Optimization


 ,
,  ,
,  and
and 
Abstract
1. Introduction
- A novel real-time MPC strategy is used to manage the control of a MG where an evolutionary technique is used as optimization engine in order to overcome the complexity of the optimization problems;
- The validation of the proposed approach and comparison with other scheduling techniques that do not follow the future horizon prediction of the MPC strategy to control the operation of a MG.
2. Related Work
3. Introduction to the Problem
3.1. System Definition
3.2. Problem Description
- The operation and maintenance of the distributed generation units are different according to their type and design. The constraints associated to each of them must be studied. Section 4 presents detailed models of each of the components of the MG;
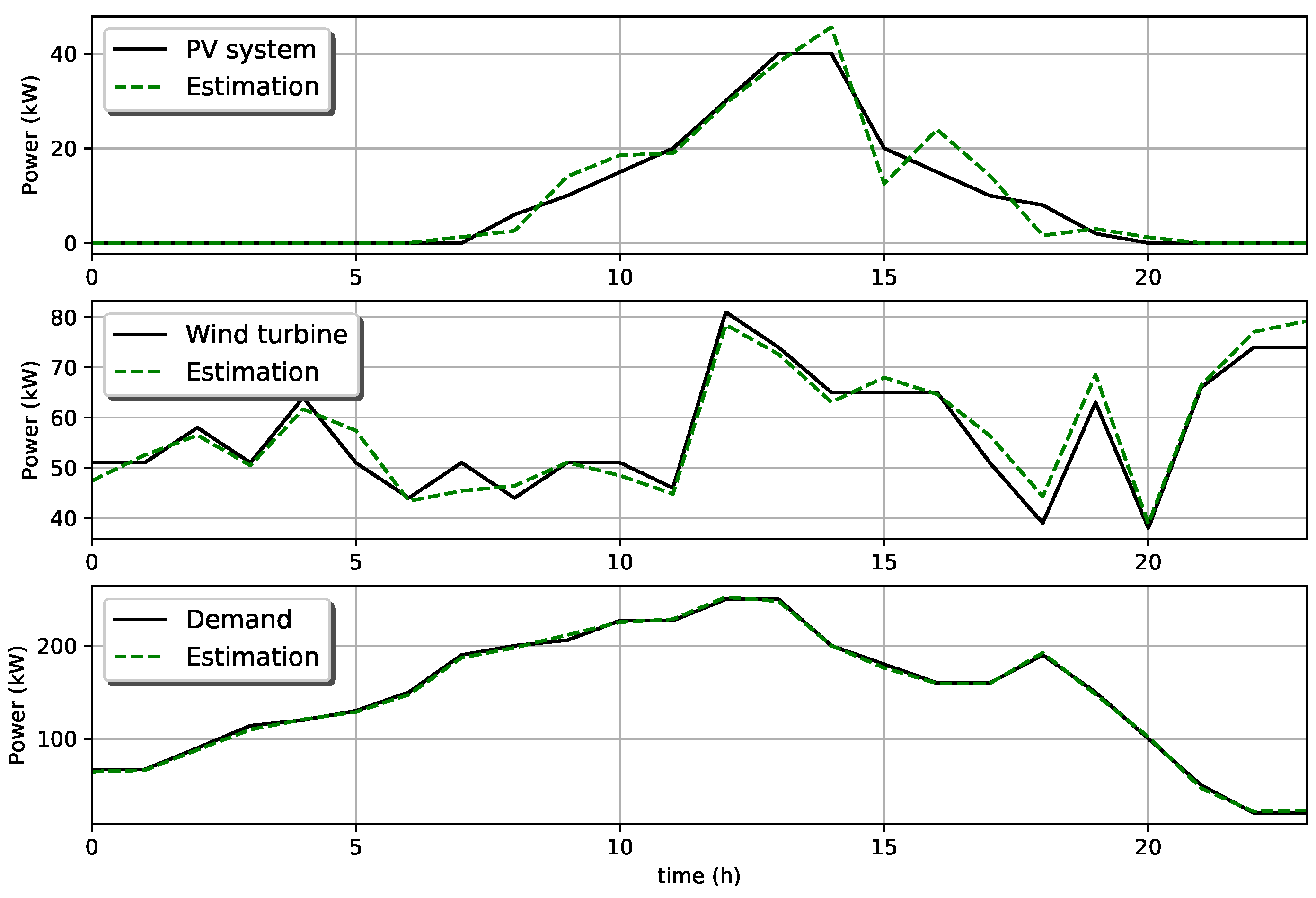
- The energy provided by the renewable resources is directly affected by the meteorological conditions. Although these conditions can be estimated, the uncertainty in the estimation is an important factor that must be incorporated in the problem;
- Discussion about the meaning of optimal operation of a MG. There are several works that study this issue, and most of them agree that the optimal operation of a MG implies the provision of a robust service, with minimal operational cost. This concern will be tackled in Section 4.
4. System Modeling
4.1. Demand and Renewable Generation Forecasting
4.2. Diesel Engine and Micro-Turbine Models
4.3. Energy Storage System
- The capacity of the battery that defines the maximum amount of energy that can be stored;
- The maximum charging and discharging rates of the ESS;
- The maximum depth of discharge that indicates the percentage of the battery that can be discharged related to the overall capacity.
4.4. Microgrid Parameters
5. Operation Objective and Proposed Solution
5.1. Model Predictive Control
5.2. Evolutionary Based Optimization
6. Simulation Results
6.1. Proposed Approach Setting
6.2. Optimal Solution
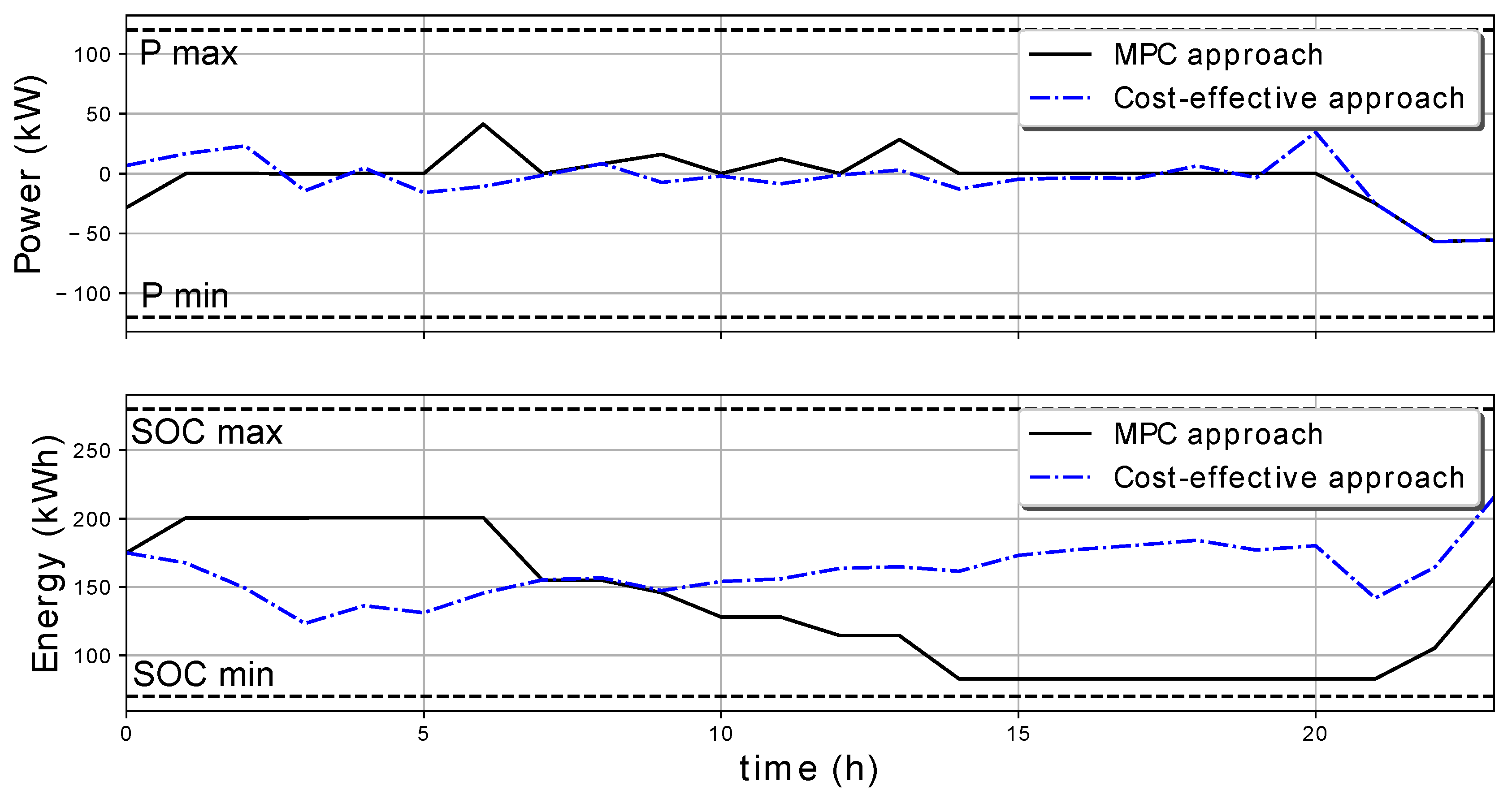
6.3. Comparison with 24-h Scheduling without the MPC Strategy
7. Conclusions and Further Work
- Due to the complexity of the problem and the non-linearities, a genetic algorithm was found as a good method to compute the optimal set points for the generation;
- It was shown that the use of a real-time MPC strategy improved the management of the microgrid studied when uncertainties were taken into consideration in comparison with off-line schedule strategies;
- The solution obtained optimized the problem while also guaranteeing the reliability of the solution;
- The genetic algorithm took very little time to solve the problem, which proved its potential use for these types of problems. In addition, it is possible to reduce the time between samples even below five seconds.
- Analyze the optimal sizing of the energy storage system taken into consideration economical factors and its lifespan;
- Study the problem when a non-islanded microgrid is taken into consideration and the price of the electricity supplied by the main grid changes with time;
- Validate the proposed solution experimentally in a real test-bench.
Author Contributions
Funding
Conflicts of Interest
References
- Nejat, P.; Jomehzadeh, F.; Taheri, M.M.; Gohari, M.; Majid, M.Z.A. A global review of energy consumption, CO2 emissions and policy in the residential sector (with an overview of the top ten CO2 emitting countries). Renew. Sustain. Energy Rev. 2015, 43, 843–862. [Google Scholar] [CrossRef]
- Gerbaulet, C.; von Hirschhausen, C.; Kemfert, C.; Lorenz, C.; Oei, P.Y. European electricity sector decarbonization under different levels of foresight. Renew. Energy 2019, 141, 973–987. [Google Scholar] [CrossRef]
- Pye, S.; Li, P.H.; Keppo, I.; O’Gallachoir, B. Technology interdependency in the United Kingdom’s low carbon energy transition. Energy Strategy Rev. 2019, 24, 314–330. [Google Scholar] [CrossRef]
- Gielen, D.; Boshell, F.; Saygin, D.; Bazilian, M.D.; Wagner, N.; Gorini, R. The role of renewable energy in the global energy transformation. Energy Strategy Rev. 2019, 24, 38–50. [Google Scholar] [CrossRef]
- Shuai, Z.; Sun, Y.; Shen, Z.J.; Tian, W.; Tu, C.; Li, Y.; Yin, X. Microgrid stability: Classification and a review. Renew. Sustain. Energy Rev. 2016, 58, 167–179. [Google Scholar] [CrossRef]
- Vera, G.; Yimy, E.; Dufo-López, R.; Bernal-Agustín, J.L. Energy Management in Microgrids with Renewable Energy Sources: A Literature Review. Appl. Sci. 2019, 9, 3854. [Google Scholar] [CrossRef]
- Hajiaghasi, S.; Salemnia, A.; Hamzeh, M. Hybrid energy storage system for microgrids applications: A review. J. Energy Storage 2019, 21, 543–570. [Google Scholar] [CrossRef]
- Zheng, Y.; Niu, S.; Shang, Y.; Shao, Z.; Jian, L. Integrating plug-in electric vehicles into power grids: A comprehensive review on power interaction mode, scheduling methodology and mathematical foundation. Renew. Sustain. Energy Rev. 2019, 112, 424–439. [Google Scholar] [CrossRef]
- Alam, M.N.; Chakrabarti, S.; Ghosh, A. Networked microgrids: State-of-the-art and future perspectives. IEEE Trans. Ind. Inform. 2018, 15, 1238–1250. [Google Scholar] [CrossRef]
- Minchala-Avila, L.I.; Garza-Castañón, L.E.; Vargas-Martínez, A.; Zhang, Y. A review of optimal control techniques applied to the energy management and control of microgrids. Procedia Comput. Sci. 2015, 52, 780–787. [Google Scholar] [CrossRef]
- Vadi, S.; Padmanaban, S.; Bayindir, R.; Blaabjerg, F.; Mihet-Popa, L. A Review on Optimization and Control Methods Used to Provide Transient Stability in Microgrids. Energies 2019, 12, 3582. [Google Scholar] [CrossRef]
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M. Microgrids energy management systems: A critical review on methods, solutions, and prospects. Appl. Energy 2018, 222, 1033–1055. [Google Scholar] [CrossRef]
- Meng, L.; Sanseverino, E.R.; Luna, A.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Microgrid supervisory controllers and energy management systems: A literature review. Renew. Sustain. Energy Rev. 2016, 60, 1263–1273. [Google Scholar] [CrossRef]
- Gamarra, C.; Guerrero, J.M. Computational optimization techniques applied to microgrids planning: A review. Renew. Sustain. Energy Rev. 2015, 48, 413–424. [Google Scholar] [CrossRef]
- Alvarado-Barrios, L.; del Nozal, Á.R.; Valerino, J.B.; Vera, I.G.; Martínez-Ramos, J.L. Stochastic unit commitment in microgrids: Influence of the load forecasting error and the availability of energy storage. Renew. Energy 2020, 146, 2060–2069. [Google Scholar] [CrossRef]
- Nemati, M.; Braun, M.; Tenbohlen, S. Optimization of unit commitment and economic dispatch in microgrids based on genetic algorithm and mixed integer linear programming. Appl. Energy 2018, 210, 944–963. [Google Scholar] [CrossRef]
- Camacho, E.; Bordons, C. Model Predictive Control. In Advanced Textbooks in Control and Signal Processing; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Palma-Behnke, R.; Benavides, C.; Lanas, F.; Severino, B.; Reyes, L.; Llanos, J.; Sáez, D. A Microgrid Energy Management System Based on the Rolling Horizon Strategy. IEEE Trans. Smart Grid 2013, 4, 996–1006. [Google Scholar] [CrossRef]
- Kopanos, G.M.; Pistikopoulos, E.N. Reactive Scheduling by a Multiparametric Programming Rolling Horizon Framework: A Case of a Network of Combined Heat and Power Units. Ind. Eng. Chem. Res. 2014, 53, 4366–4386. [Google Scholar] [CrossRef]
- Silvente, J.; Kopanos, G.M.; Pistikopoulos, E.N.; Espuña, A. A rolling horizon optimization framework for the simultaneous energy supply and demand planning in microgrids. Appl. Energy 2015, 155, 485–501. [Google Scholar] [CrossRef]
- Abdou, I.; Tkiouat, M. Unit commitment problem in electrical power system: a literature review. Int. J. Electr. Comput. Eng. 2018, 8, 1357. [Google Scholar] [CrossRef]
- Franz, A.; Rieck, J.; Zimmermann, J. Fix-and-optimize procedures for solving the long-term unit commitment problem with pumped storages. Ann. Oper. Res. 2019, 274, 241–265. [Google Scholar] [CrossRef]
- Córdova, S.; Rudnick, H.; Lorca, Á.; Martínez, V. An Efficient Forecasting-Optimization Scheme for the Intraday Unit Commitment Process Under Significant Wind and Solar Power. IEEE Trans. Sustain. Energy 2018, 9, 1899–1909. [Google Scholar] [CrossRef]
- Khan, A.A.; Naeem, M.; Iqbal, M.; Qaisar, S.; Anpalagan, A. A compendium of optimization objectives, constraints, tools and algorithms for energy management in microgrids. Renew. Sustain. Energy Rev. 2016, 58, 1664–1683. [Google Scholar] [CrossRef]
- Bordons, C.; Garcia-Torres, F.; Ridao, M.A. Model Predictive Control of Microgrids; Springer: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- Meibom, P.; Barth, R.; Hasche, B.; Brand, H.; Weber, C.; O’Malley, M. Stochastic optimization model to study the operational impacts of high wind penetrations in Ireland. IEEE Trans. Power Syst. 2010, 26, 1367–1379. [Google Scholar] [CrossRef]
- Gao, H.C.; Choi, J.H.; Yun, S.Y.; Lee, H.J.; Ahn, S.J. Optimal scheduling and real-time control schemes of battery energy storage system for microgrids considering contract demand and forecast uncertainty. Energies 2018, 11, 1371. [Google Scholar] [CrossRef]
- Zhuo, W. Microgrid energy management strategy with battery energy storage system and approximate dynamic programming. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 7581–7587. [Google Scholar]
- Parisio, A.; Rikos, E.; Glielmo, L. A model predictive control approach to microgrid operation optimization. IEEE Trans. Control. Syst. Technol. 2014, 22, 1813–1827. [Google Scholar] [CrossRef]
- TayyebTaher, M.; Esmaeilzadeh, S.M. Model predictive control of attitude maneuver of a geostationary flexible satellite based on genetic algorithm. Adv. Space Res. 2017, 60, 57–64. [Google Scholar] [CrossRef]
- Ciminski, A.; Duzinkiewicz, K. Direct algorithm for optimizing robust MPC of drinking water distribution systems hydraulics. In Proceedings of the 2017 22nd International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 28–31 August 2017; pp. 13–18. [Google Scholar]
- Mohammadi, A.; Asadi, H.; Mohamed, S.; Nelson, K.; Nahavandi, S. Multiobjective and interactive genetic algorithms for weight tuning of a model predictive control-based motion cueing algorithm. IEEE Trans. Cybern. 2018, 49, 3471–3481. [Google Scholar] [CrossRef]
- Sathasivam, L.; Elamvazuthi, I.; Khan, M.A.; Parasuraman, S. Tuning A Three-Phase Separator Level Controller via Particle Swarm OptimizationAlgorithm. In Proceedings of the 2018 International Conference on Recent Trends in Electrical, Control and Communication (RTECC), Chennai, India, 20–22 March 2018; pp. 265–268. [Google Scholar]
- Sarimveis, H.; Bafas, G. Fuzzy model predictive control of non-linear processes using genetic algorithms. Fuzzy Sets Syst. 2003, 139, 59–80. [Google Scholar] [CrossRef]
- Ramos Ruiz, G.; Lucas Segarra, E.; Fernández Bandera, C. Model Predictive Control Optimization via Genetic Algorithm Using a Detailed Building Energy Model. Energies 2019, 12, 34. [Google Scholar] [CrossRef]
- Utkarsh, K.; Srinivasan, D.; Trivedi, A.; Zhang, W.; Reindl, T. Distributed model-predictive real-time optimal operation of a network of smart microgrids. IEEE Trans. Smart Grid 2018, 10, 2833–2845. [Google Scholar] [CrossRef]
- Utkarsh, K.; Trivedi, A.; Srinivasan, D.; Reindl, T. A consensus-based distributed computational intelligence technique for real-time optimal control in smart distribution grids. IEEE Trans. Emerg. Top. Comput. Intell. 2016, 1, 51–60. [Google Scholar] [CrossRef]
- Alvarado-Barrios, L.; Rodríguez del Nozal, A.; Tapia, A.; Martínez-Ramos, J.L.; Reina, D. An Evolutionary Computational Approach for the Problem of Unit Commitment and Economic Dispatch in Microgrids under Several Operation Modes. Energies 2019, 12, 2143. [Google Scholar] [CrossRef]
- Lasseter, R.H. MicroGrids. In Proceedings of the 2002 IEEE Power Engineering Society Winter Meeting, New York, NY, USA, 27–31 January 2002; Volume 1, pp. 305–308. [Google Scholar]
- Zhang, Y.; Gatsis, N.; Giannakis, G.B. Robust energy management for microgrids with high-penetration renewables. IEEE Trans. Sustain. Energy 2013, 4, 944–953. [Google Scholar] [CrossRef]
- Inman, R.H.; Pedro, H.T.C.; Coimbra, C.F.M. Solar forecasting methods for renewable energy integration. Prog. Energy Combust. Sci. 2013, 39, 535–576. [Google Scholar] [CrossRef]
- Pinson, P. Wind energy: Forecasting challenges for its operational management. Stat. Sci. 2013, 28, 564–585. [Google Scholar] [CrossRef]
- Suganthi, L.; Samuel, A.A. Energy models for demand forecasting—A review. Renew. Sustain. Energy Rev. 2012, 16, 1223–1240. [Google Scholar] [CrossRef]
- Zhu, J. Optimization of Power System Operation; John Wiley & Sons: Hoboken, NJ, USA, 2015; Volume 47. [Google Scholar]
- Wood, A.J.; Wollenberg, B.F.; Sheblé, G.B. Power Generation, Operation, and Control; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Chen, S.X.; Gooi, H.; Wang, M. Sizing of energy storage for microgrids. IEEE Trans. Smart Grid 2011, 3, 142–151. [Google Scholar] [CrossRef]
- Ser, J.D.; Osaba, E.; Molina, D.; Yang, X.S.; Salcedo-Sanz, S.; Camacho, D.; Das, S.; Suganthan, P.N.; Coello, C.A.C.; Herrera, F. Bio-inspired computation: Where we stand and what’s next. Swarm Evol. Comput. 2019, 48, 220–250. [Google Scholar] [CrossRef]
- Fortin, F.A.; Rainville, F.M.D.; Gardner, M.A.; Parizeau, M.; Gagné, C. DEAP: Evolutionary algorithms made easy. J. Mach. Learn. Res. 2012, 13, 2171–2175. [Google Scholar]
- Gutierrez, D. MPC-GA. 2019. Available online: https://github.com/Dany503/MPC-GA (accessed on 1 October 2019).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | (kW) | (kW) | (€/h) | (€/kW h) | (€/kW h) | (€) | (€) | (€) |
|---|---|---|---|---|---|---|---|---|
| Diesel engine | 5 | 80 | 1.9250 | 0.2455 | 0.0012 | 0.3 | 0.4 | 5.2 |
| Microturbine | 20 | 140 | 7.4344 | 0.2015 | 0.0002 | 0.4 | 0.28 | 7.1 |
| (kW) | (kW) | (kWh) | (kWh) | ||
|---|---|---|---|---|---|
| −120 | 120 | 70 | 280 | 0.9 | 0.9 |
| Parameter | Value |
|---|---|
| 400 | |
| 400 | |
| Individuals | 400 |
| Generations | 200 |
| Selection | Tournament size = 3 |
| Crossover | Two-point . |
| Mutation | Gaussian , . |
| Number of trials | 15 |
| Offline Approach | MPC-Based Approach |
|---|---|
| 820.62 | 701.19 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez del Nozal, Á.; Gutiérrez Reina, D.; Alvarado-Barrios, L.; Tapia, A.; Escaño, J.M. A MPC Strategy for the Optimal Management of Microgrids Based on Evolutionary Optimization. Electronics 2019, 8, 1371. https://doi.org/10.3390/electronics8111371
Rodríguez del Nozal Á, Gutiérrez Reina D, Alvarado-Barrios L, Tapia A, Escaño JM. A MPC Strategy for the Optimal Management of Microgrids Based on Evolutionary Optimization. Electronics. 2019; 8(11):1371. https://doi.org/10.3390/electronics8111371
Chicago/Turabian StyleRodríguez del Nozal, Álvaro, Daniel Gutiérrez Reina, Lázaro Alvarado-Barrios, Alejandro Tapia, and Juan Manuel Escaño. 2019. "A MPC Strategy for the Optimal Management of Microgrids Based on Evolutionary Optimization" Electronics 8, no. 11: 1371. https://doi.org/10.3390/electronics8111371
APA StyleRodríguez del Nozal, Á., Gutiérrez Reina, D., Alvarado-Barrios, L., Tapia, A., & Escaño, J. M. (2019). A MPC Strategy for the Optimal Management of Microgrids Based on Evolutionary Optimization. Electronics, 8(11), 1371. https://doi.org/10.3390/electronics8111371