1. Introduction
Whilst various technologies are available for magnetic field measurement, Hall probes are commonly used for magnetic field map measurements when characterizing insertion devices. Insertion devices, also known as undulators, are powerful generators of synchrotron radiation in storage rings [
1].
The scope of obtaining a field map tied down to a coordinate system across the whole undulator length enables the detection of kicks and imperfections in magnet pole positions across the undulator.
One of the undulator lines in SwissFEL at the Paul Scherrer Institute (PSI) is ATHOS, which is capable of covering the entire soft X-ray range from about 200 eV to 2 keV on the fundamental harmonic with full polarization control [
2]. Each undulator module is 4 m long with a period of 40 mm and a physical magnetic gap in the range of 6.5 to 24 mm.
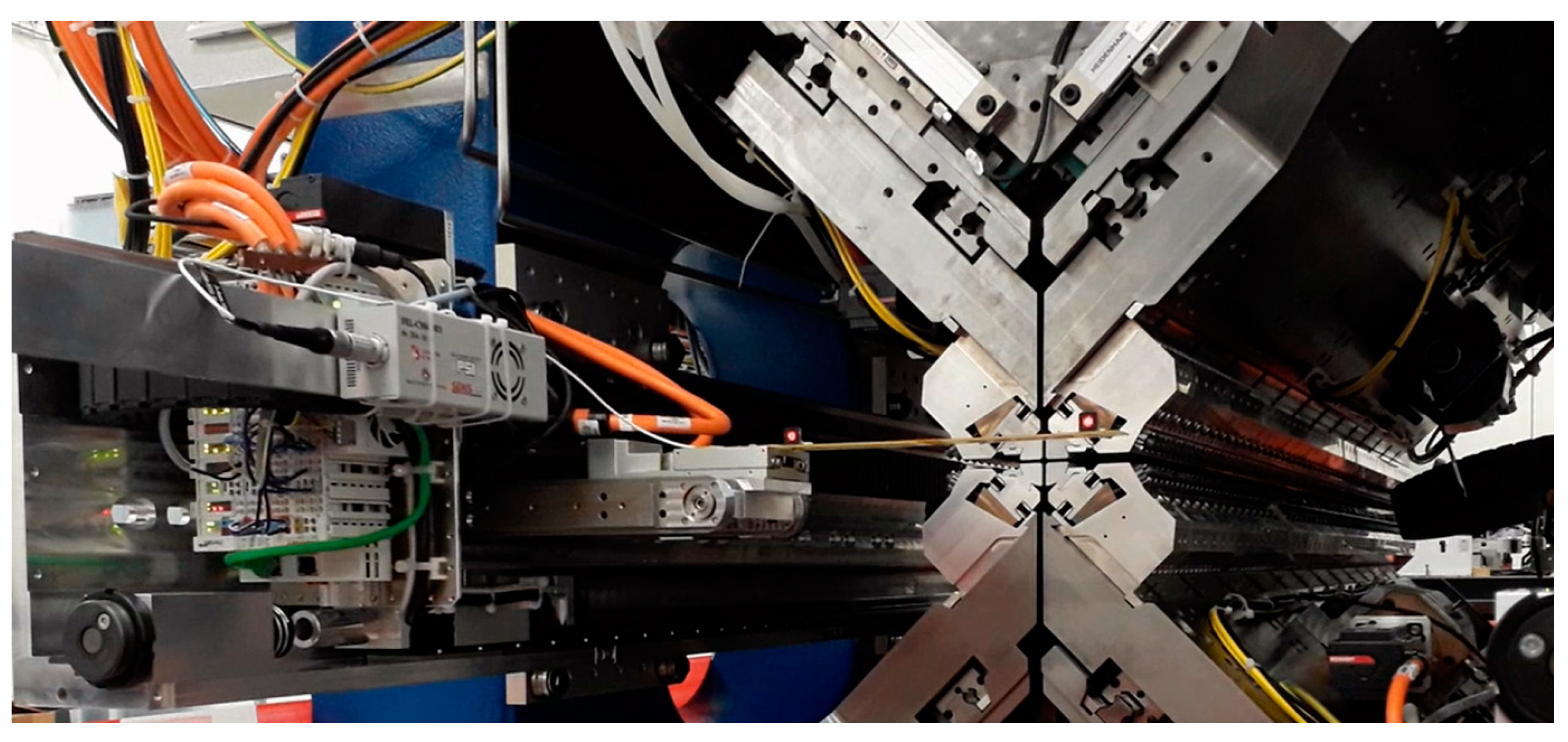
The characterization of the individual periods of one undulator segment is performed using a 3-axes Hall probe, which is moved longitudinally along the laser line.
B(
z) is measured along the undulator length. The trajectory angle
ϕ given by Equation (1) and the offset
x given by Equation (2) are calculated locally at every magnet period and are corrected by vertical adjustment of the keeper support and the horizontal adjustment of the pole [
2].
For this purpose, a novel three axis teslameter has been developed that is interfaced to a SENIS type S Hall probe [
3] for the high fidelity characterization of the new line of the ATHOS undulators.
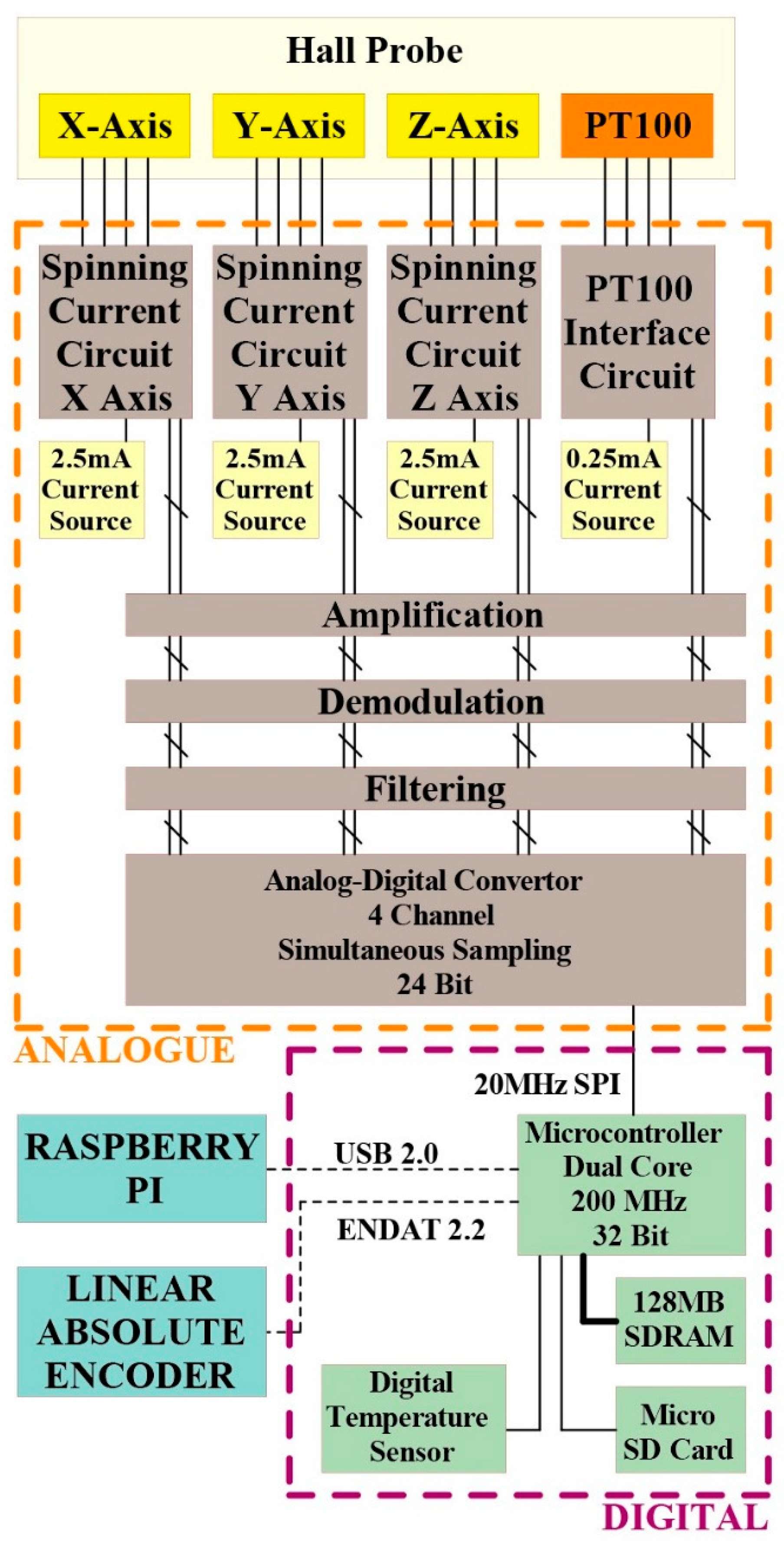
2. Architecture of the Electronic Circuitry
The developed instrument comprises interfacing circuitry to a 3-axes Hall probe using the spinning current modulation technique [
4,
5,
6] explained in detail in
Section 3 and further amplified in [
7]. Each axis of the Hall probe is biased with a very high precision and temperature independent 2.5 mA current source. As the Hall probe has an on-die PT100 sensor, this is also interfaced to the instrument using the four-wire configuration, so that lead wire resistance does not affect the true voltage temperature readout. In order to minimize any self-heating effects of the PT100, the bias current used is just 250 µA.
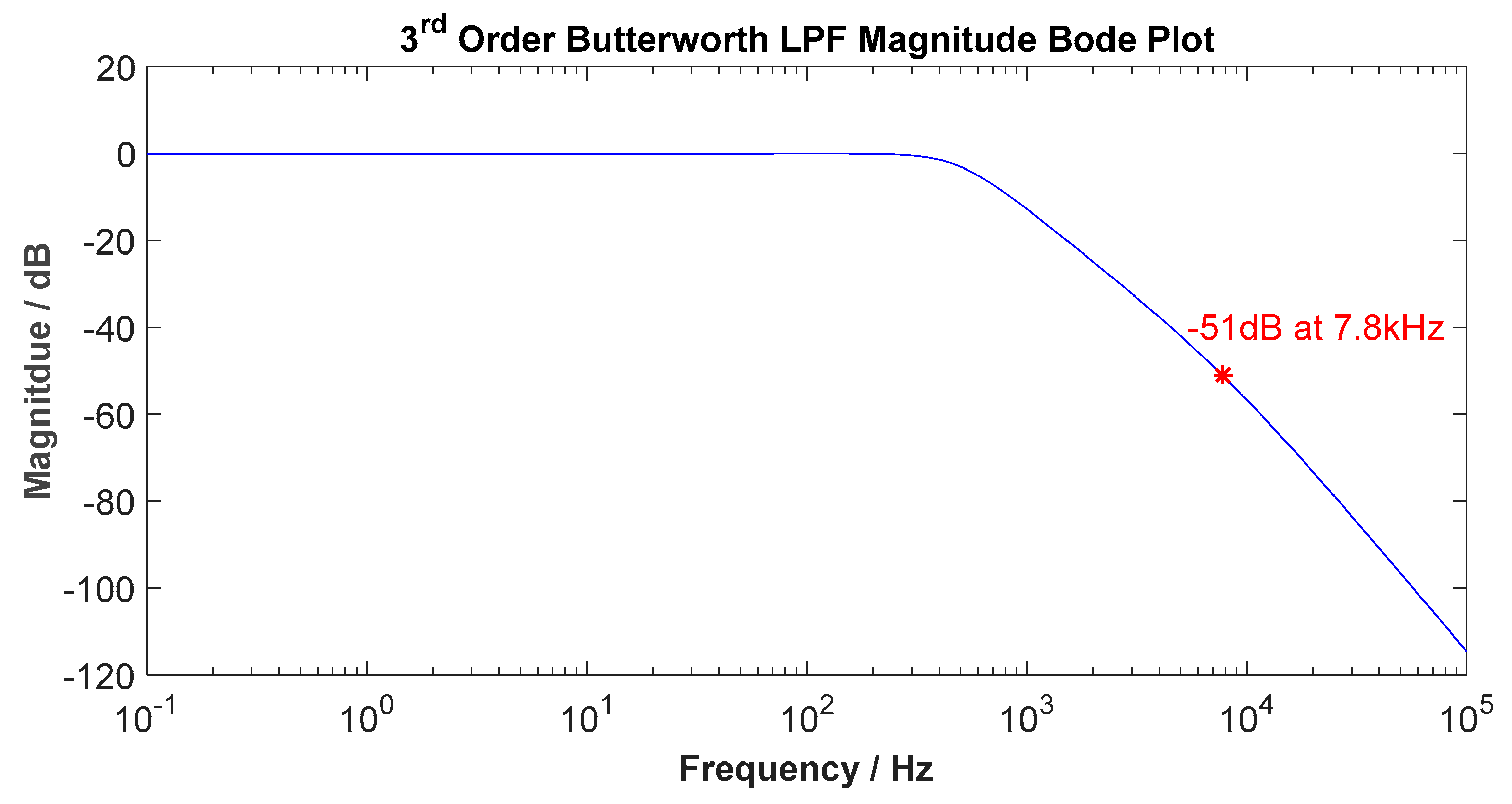
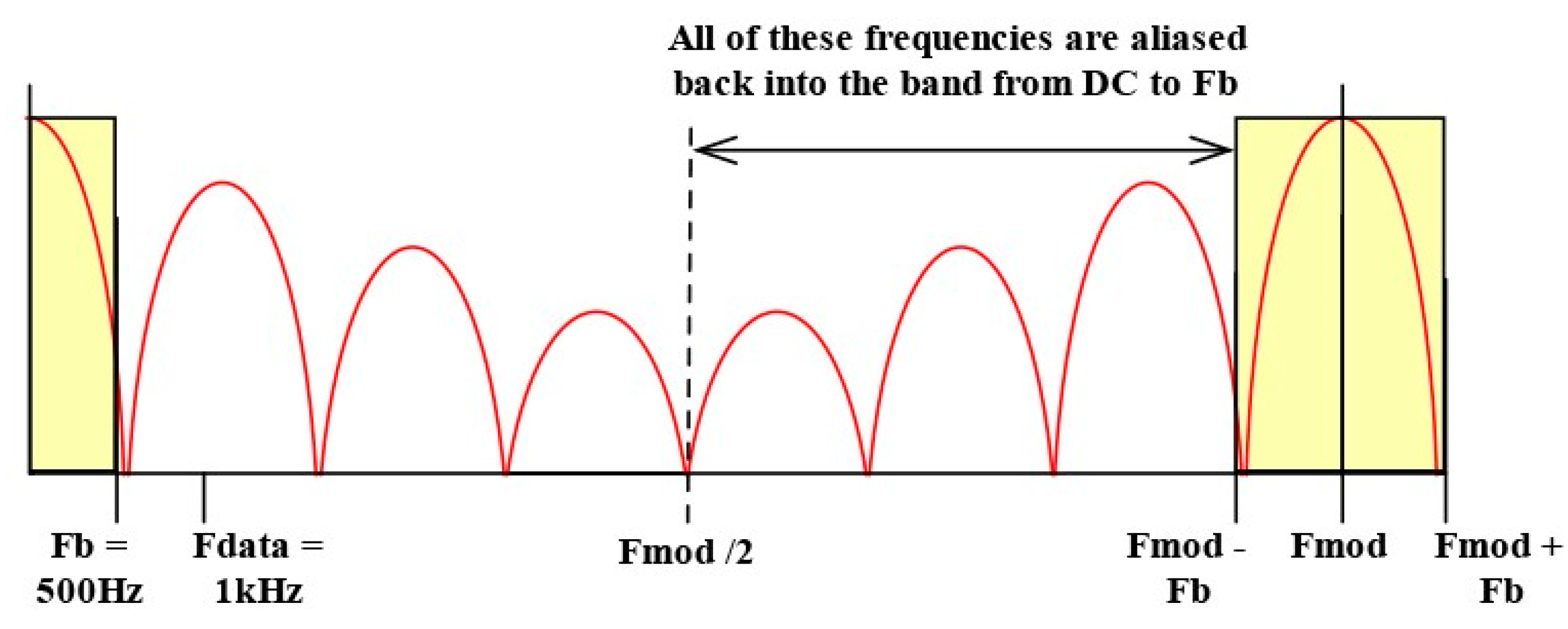
The four analog differential voltages are all amplified, demodulated, and low pass filtered to a 500 Hz bandwidth. This is performed by a 3rd order low pass fully differential Butterworth filter on each channel, which serves as an antialiasing filter for the ADC and the internal digital sinc3 filter of the ADC. The antialiasing filter was designed with a bandwidth of 500 Hz, providing a ripple free response and no attenuation in the passband that covers the full frequency response of the Hall probe.
All the differential signal paths are length matched and routed parallel to each other to optimize CMRR (common mode rejection ratio). Also, each pair of the differential tracks are routed separately to the other pairs with a copper pour ground area in between in order to minimize crosstalk.
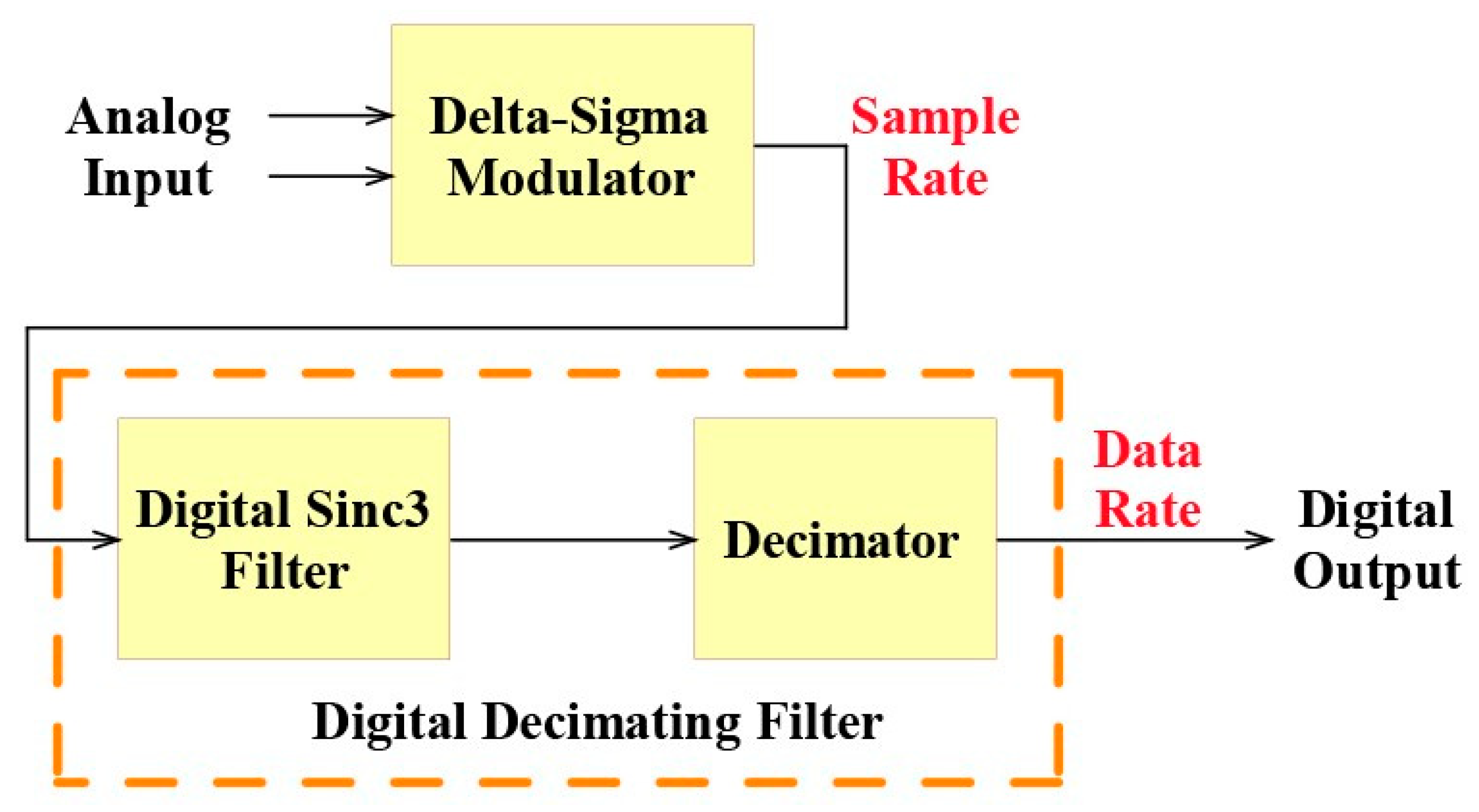
The four channel simultaneous sampling delta-sigma analog-to-digital converter [
8] digitizes the four analog signals with 24-bit resolution. Oversampling techniques implemented through the delta-sigma architecture of the ADC enable the differential analog input voltage to be sampled at an effective frequency of 4.096 MHz from the delta-sigma modulator, as shown in
Figure 1. The modulator then converts the analog input signal into a high-speed, pulse-wave representation. Further details of the implementation can be found in [
7].
The third order sinc filter on each channel of the ADC works in the digital domain as data that is supplied to the filter from the modulator at the rate of f
MOD. A detailed phase analysis and magnitude analysis are presented in
Section 6 that pertain to the frequency response of the sinc
3 filter. The digital sinc
3 filter still operates at the modulator sampling rate for the decimator to be able to reduce the digital signal’s output rate to the desired Nyquist frequency according to the output data rate. The decimating function works by accumulating and averaging together groups of 24-bit data. In this way, the actual output data rate is decimated down in the kHz range.
The noise performance of the ADS131A04 is best described in
Table 1 for the output data rates of 1, 2, 4, and 8 kHz. This provides the theoretical noise figures, as from [
8], in the functioning mode that the ADC is working in, whereby the analog supply voltage is ±2.5 V and the external reference voltage is 4.096 V. The effective number of bits and the RMS (root mean square) noise voltage figures are obtained with the analog inputs shorted together and by taking an average of multiple readings across all channels. Since full dynamic range covers ±2 T obtained through calibration and hardware amplification gain, noise figures are also presented in µT.
The dual core TMS320F28379D C2000 series Delfino microcontroller [
9] is a powerful 32-bit floating point microcontroller.
The natural choice of communication and data transfer with the Raspberry Pi platform controlling the operation of the measurement rig is implemented through a USB 2.0 link. This USB interface serves both for the instrument to receive direct commands from the Raspberry Pi, such as initiation or termination of measurements, and also to transfer the acquired data during measurement from the on-board 128 MB SDRAM (single data rate random access memory). The size of the SDRAM has been based on the notion that since the ATHOS undulators are 4 m in length, and axis traversal is performed at a minimum of 10 mm/s, the maximum acquired data size at an output data rate of 8 kHz for a single back-and-forth mapping of the undulator will fit within 128 MB. Each reading is 20-bytes long, consisting of the X-axis, Y-axis, and Z-axis magnetic fields, temperature, and encoder position reading. After a complete traversal of the undulator axis, the acquired raw data is computed to calibrated data and then stored on the micro SD card or else transmitted via USB to the Raspberry Pi.
The instrument also supports an RS-485 interface to a Heidenhain linear absolute encoder. Communication to the LIC 4117 Heidenhain encoder is done using the EnDat 2.2 protocol, which is a digital bidirectional interface standard for position and rotary encoders [
10]. An accuracy of ±3 µm with a measuring step of 10 nm is provided by the encoder. The magnetic field readings and the physical position reading are synchronized. The time lag between the falling edge of the ADC interrupt signal indicating that data is readily available to be clocked out and the start of the encoder polling transmission command amounts to 8.4 µs, being equivalent to a total of 1680 clock cycles for the microcontroller to handle the request.
The instrument architecture is presented in
Figure 2, which shows the different blocks of the instrument circuitry both for the analog and the digital domain as explained. This developed architecture provides a tailored solution for this application in mapping the magnetic field across the undulator length with respect to position. In this way, better performance in the synchronization timing and noise performance is achieved.
The instrument circuit board is an 8-layer PCB (printed circuit board). The PCB is 144 mm long and 44 mm wide. The PCB layer stack-up incorporates four signal layers, two internal ground planes, and two internal power supply planes, which make it possible to condense such complex circuitry in a very tight physical space. The two signal layers in the middle, sandwiched between the two ground planes, provide excellent noise immunity for the sensitive and noise-prone analog signal tracks. The layout of the PCB, as shown in
Figure 3, incorporates all the circuitry blocks presented in
Figure 2 with all the analog circuitry partitioned on the left-hand side of the board away from the digital circuitry to minimize any digital switching noise from entering the analog section. Also, the analog and the digital ground planes are connected via a high impedance star point beneath the ADC.
Figure 3 is a photo of the complete instrument in a tailor-designed and manufactured 1.6 mm thick grey powder-coated aluminum enclosure. The PCB is screwed to 6 mm high standoffs. A cooling fan is mounted on the top cover of the enclosure and extracts the heat generated by the microcontroller to minimize any temperature hotspots and to keep the temperature as stable as possible.
3. Spinning Current Modulation Technique
As explained in [
5], the signal
Vout at the output of the analog chain is composed of different contributions. This can be denoted by Equation (3):
where
is the overall electronic gain,
is the true Hall voltage,
and
are the raw offsets of the Hall plate and the amplification stage, respectively.
is the sum of the thermoelectric voltages in the output circuit between the sense outputs and the pre-amplifier (PA) input.
is the pickup voltage in the output circuit. The terms
and
come into effect due to the physical interconnections between the Hall probe output and the amplification stage.
and
are the low frequency noise of the Hall plate and the PA, respectively. The white noise
is contributed by the Hall plate and the PA stage. Therefore, DC (direct current) bias excitation of the Hall probe will result in an output voltage far from the true Hall voltage as all these parasitic components add up.
Proper compensation of offsets and drifts is attained using the spinning current modulation technique [
4,
5,
6]. This technique allows dynamic cancellation of the offset and low frequency noise. The bias and sense terminals of the Hall plate are periodically swapped. A Hall device, as depicted in
Figure 4, is commonly modelled as a four terminal resistive Wheatstone bridge [
1], whereby the inherent offset is linked to an imbalance in one of the resistive legs. This offset that appears at the output even in the absence of a magnetic field, finds its origins due to a structural asymmetry of the active part and also alignment errors of the sense contacts, one being further upstream and the other downstream with respect to the bias current [
1].
One arbitrarily defines the orientation given by PH (phase) 1 as shown in
Figure 4, to produce a Hall voltage in the given direction with an offset voltage opposing the Hall voltage. Bias current rotation is implemented through PH 2 to PH 4, whereby the Hall voltage rotates in the same direction as the bias current, indicated by the green arrows in
Figure 4. Hall voltage polarity depends only on the current direction. As the offset voltage remains static in the Hall sensor throughout the rotation, its polarity is different than that of the Hall voltage. Amplification of the Hall voltage output and the offset together with their inversions is done to obtain the full dynamic range and keep the signal chain fully differential.
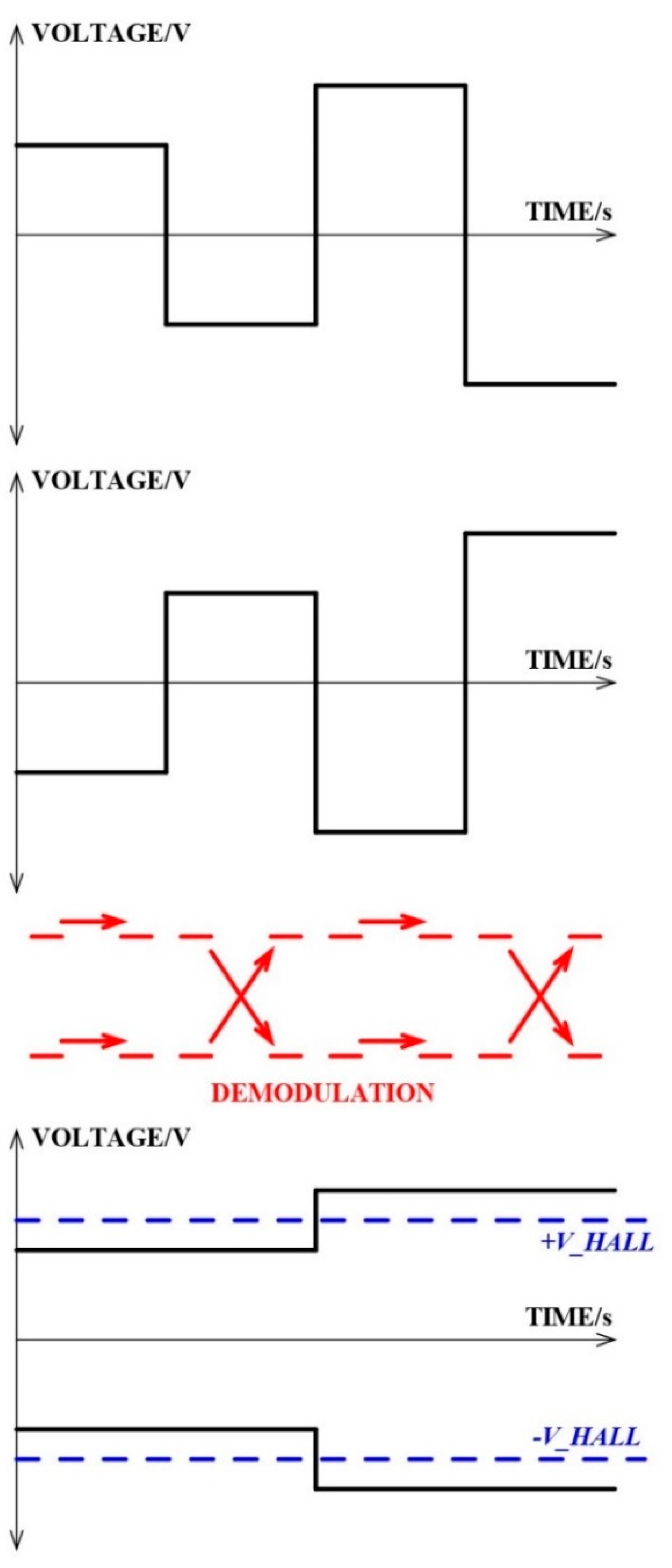
For the given spinning sequence depicted in
Figure 4, the digital demodulation key needed for recovering the pure Hall signal is given by the signs of the Hall signal after modulation. The two top graphs in
Figure 5 depict the output response of the amplification stage after spinning is applied.
Demodulation is performed using an additional set of analog switches, whose switching configuration determines the signal output. The demodulation key, outlined in
Figure 5 in red and also given in
Table 2, provides the correct differential voltage with only a polarity change in the offset that can be filtered out. The offset of the Hall device and the PA offset can be extracted instead of the true Hall voltage by choosing other demodulation keys as suggested in
Table 3 and
Table 4 and further explained in [
5].
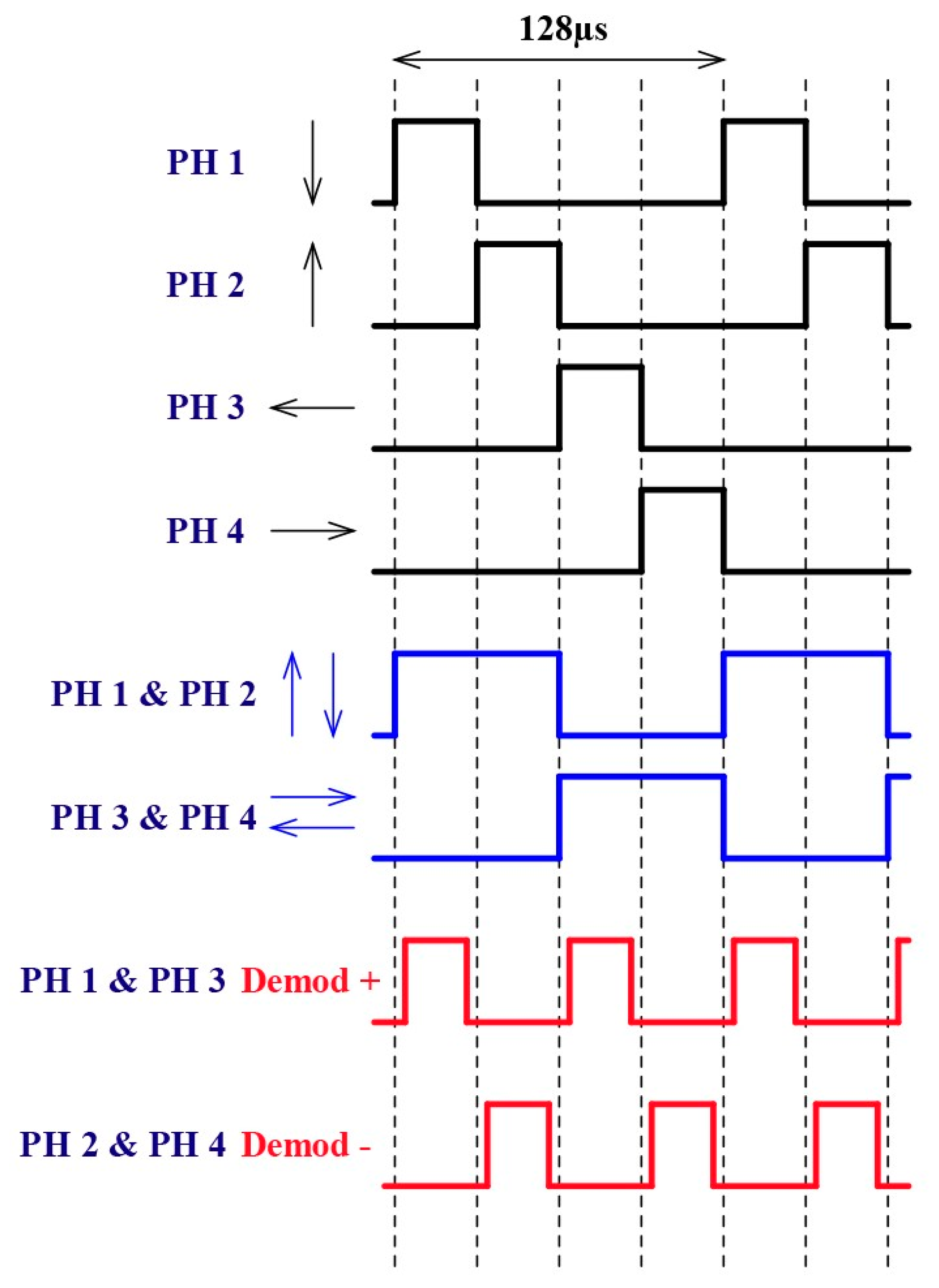
The spinning of the current through the Hall probe is controlled using the first set of synchronized PWM (pulse width modulation) signals as depicted in
Figure 6. One whole period comprising of four phases takes 128 µs (7.8 kHz). The spinning sequence is chosen to be at a much higher frequency than the bandwidth of the Hall probe. This allows proper filtering of the switching noise and its related harmonics without deteriorating the bandwidth of interest.
Voltage readout from the Hall probe requires a change in the connection to the amplification stage in PH 3 and PH 4, as shown in
Figure 4. This entails a voltage readout spinning circuit, controlled using two PWM signals, depicted in blue in
Figure 6.
4. Instrument Calibration
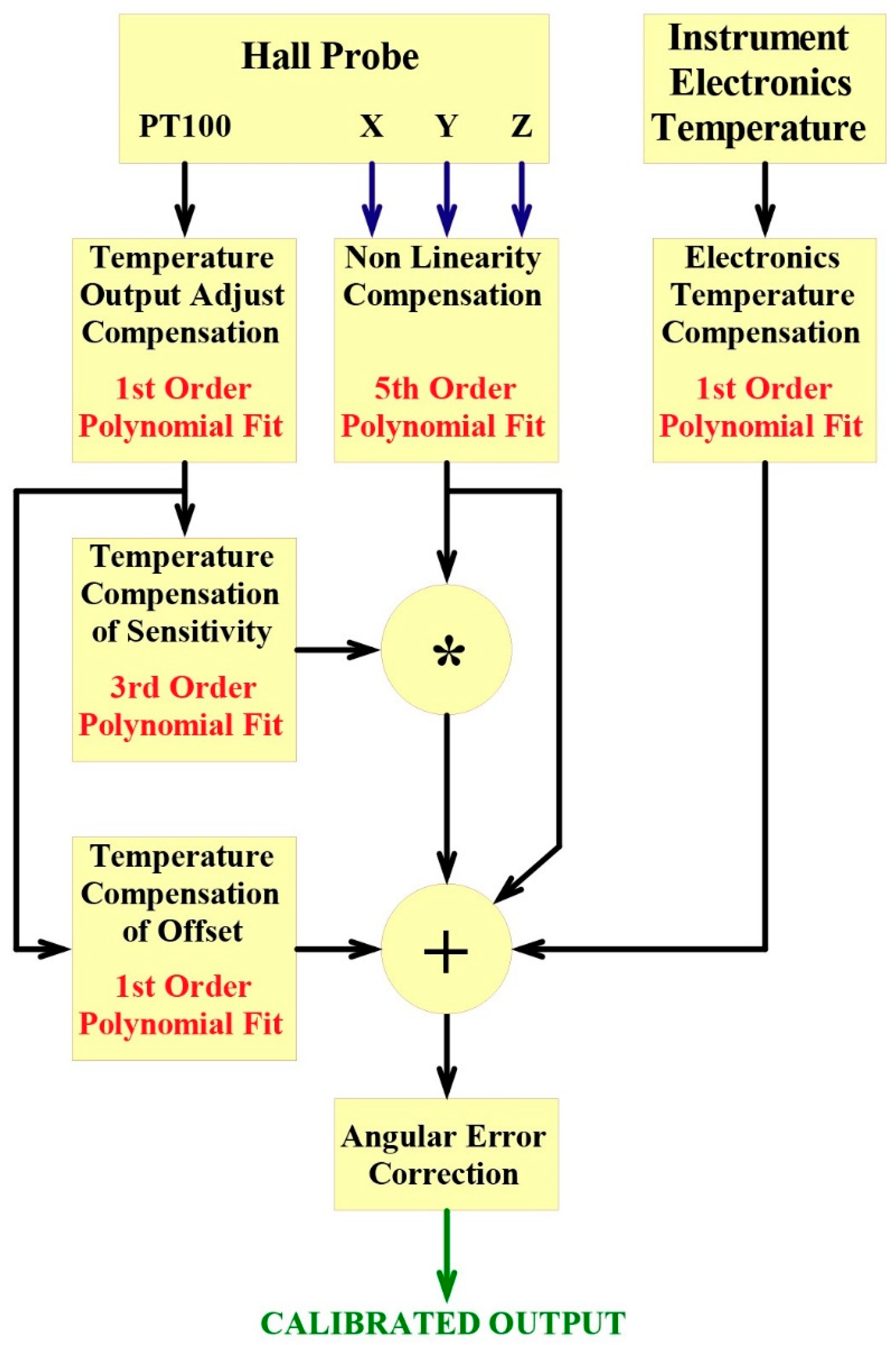
Performance measurement of the instrument is based on fully calibrated data. As the calibration of the instrument is quite a complex and long process, an overview is given here that revolves around the calibration block diagram presented in
Figure 7. The instrument is calibrated over the ±2 T range for all three axes. The highly nonlinear voltage output of the Hall probe with respect to the true magnetic field applied is calibrated using a 5th order polynomial. This is performed by exposing the Hall probe to the whole ±2 T range in 50 mT steps and the digitized voltage output from the instrument together with actual NMR readings are recorded simultaneously. The residual percentage standard deviation error decreases from 1.17% down to 0.004% upon non-linearity calibration. This calibration step also compensates for the constant offset registered by the Hall probe at an ambient temperature of 24 °C, which is nulled.
As the Hall probe analog output is very temperature-dependent, temperature compensation of the offset and the sensitivity are necessary steps for a proper calibration. Therefore, as the Hall probe comprises an on-die PT100 sensor, the temperature of the Hall probe is read using the “Temperature Output Adjust Compensation” block, which translates the voltage across the PT100 sensor to an actual temperature value. Since the PT100 is a platinum resistive element with a constant positive temperature coefficient, this relationship is a linear one. This temperature reading is directly used to model the change in the offset as the Hall probe is at zero gauss for the temperature range from 14 °C up to 34 °C. This is modelled using a first order polynomial where the difference in the offset registered between the 24 °C scenario and any other temperature is subtracted.
As the sensitivity of the Hall probe changes according to the temperature, this must be calibrated by performing temperature hysteresis sweeps for various plateau values across the full magnetic field dynamic range. The change in the sensitivity is modelled using a cubic polynomial fit, which results in a further reduction of the error after linearization.
Variation in the instruments’ electronics temperature must also be calibrated since this predominantly affects the gain set by the external resistors in the amplification stage. Therefore, the instrument is placed in a temperature chamber whilst the Hall probe is kept at zero gauss in a highly stable ambient temperature environment. The additional offset introduced when the instrument is at ambient temperatures other than 24 °C is linearly compensated.
All the corrections are added to the signal at the point indicated by the summer in
Figure 7 and the calibrated value is output. This calibration is performed individually for all three axes. However, as it is physically impossible for the three Hall sensor dies to be perfectly orthogonally oriented to each other, angular errors of about 1° must be calibrated. As explained in [
11], this calibration entails placing the probe at three precisely known angular positions in the magnetic field with known components, and the Hall output voltages are read. For each sensitivity axis, a set of three linear equations with three unknowns are obtained, which are then solved. The sensitivity tensor with all nine components is found and applied as the last calibration step, which reduces the effective angular errors of the Hall probe to less than 0.1°, as stated in [
11].
7. Discussion and Conclusions
The development and the performance of a novel three axes teslameter, which will be used in the characterization of the ATHOS beamline undulators, has been presented throughout this paper.
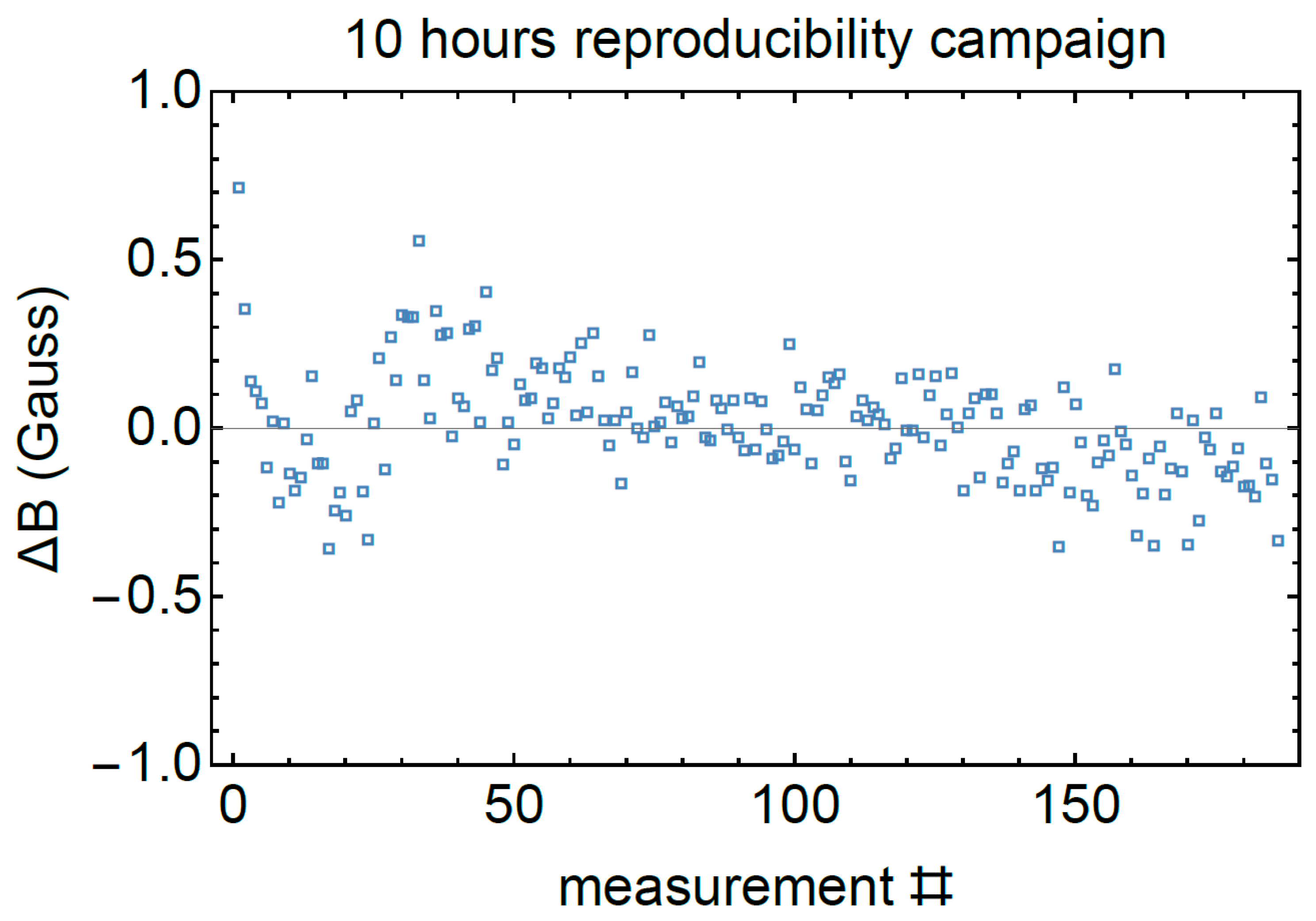
Repeatability performance tests yield an average percentage error of 0.005% over a magnetic field peak of ±1 T at an output data rate of 1 kHz.
Noise performance analysis shows that the best case DC offset fluctuation and drift has a standard deviation of 0.78 µT at a 1 kHz output data rate over a 10 Hz bandwidth. Worst case AC noise at a 500 Hz bandwidth amounts to a standard deviation of 2.05 µT at a 2 kHz output data rate.
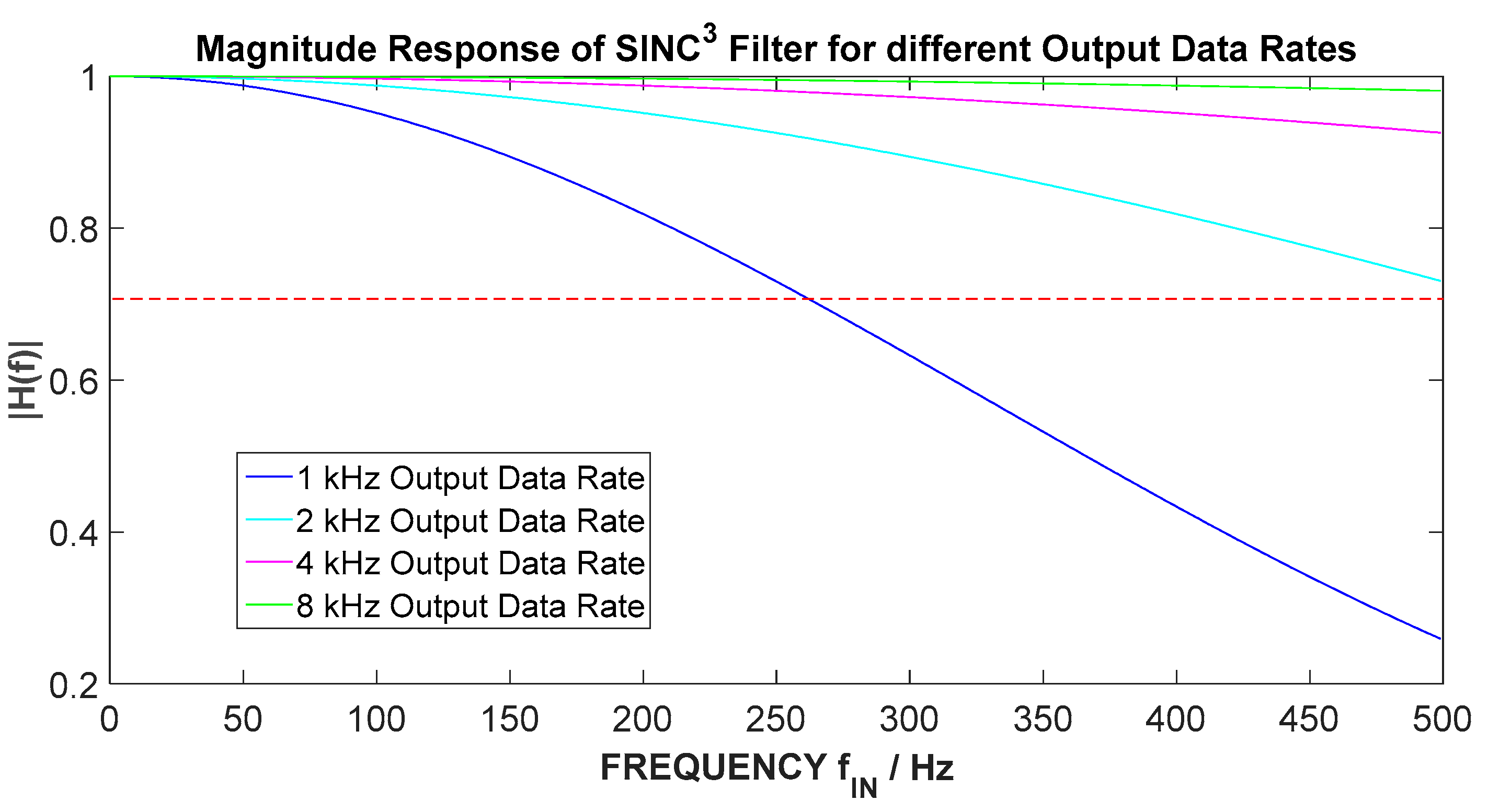
Magnitude frequency analysis of the internal sinc3 filter in the ADC shows a direct dependence of the bandwidth on the output data rate. An output data rate of 1 kHz was found to limit the bandwidth of the sinc3 filter to 262 Hz, which does not cover the full Hall probe bandwidth. The best tradeoff in this scenario was the application of the 2 kHz output data rate when considering that the full bandwidth of interest was attained, and noise figures still remained within an acceptable range.
However, apart from the noise and bandwidth, another variable to be considered is the data transfer times of the acquired data to the on board micro SD card and via the USB interface after measurement time. As one minute of measurement time at an output data rate of 1 kHz yields 8 s and 20 s of transfer times for the USB and micro SD card, respectively, these transfer times will then double with the output data rate. This must also be considered in general if the total experimental time is an issue and is preferably minimized.
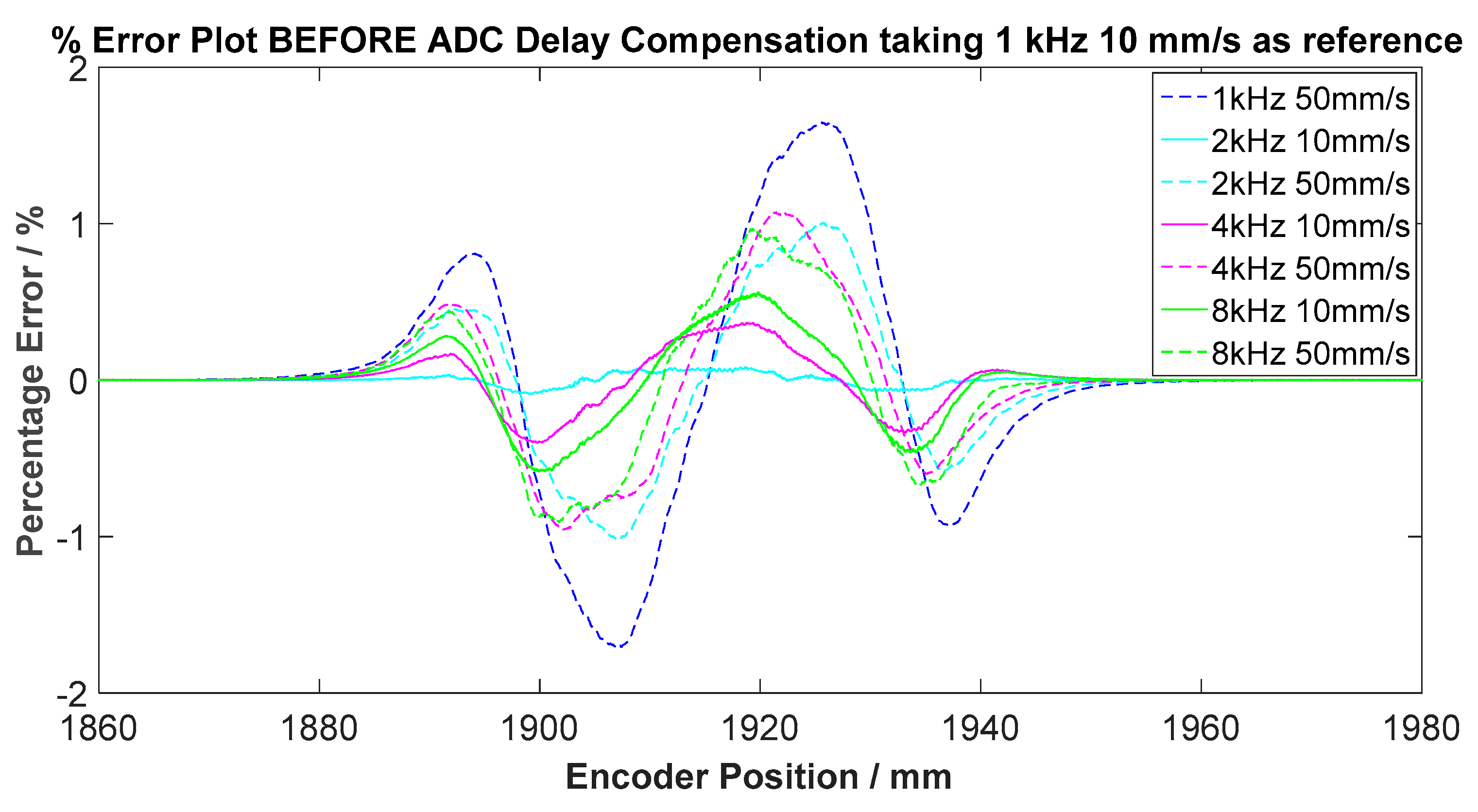
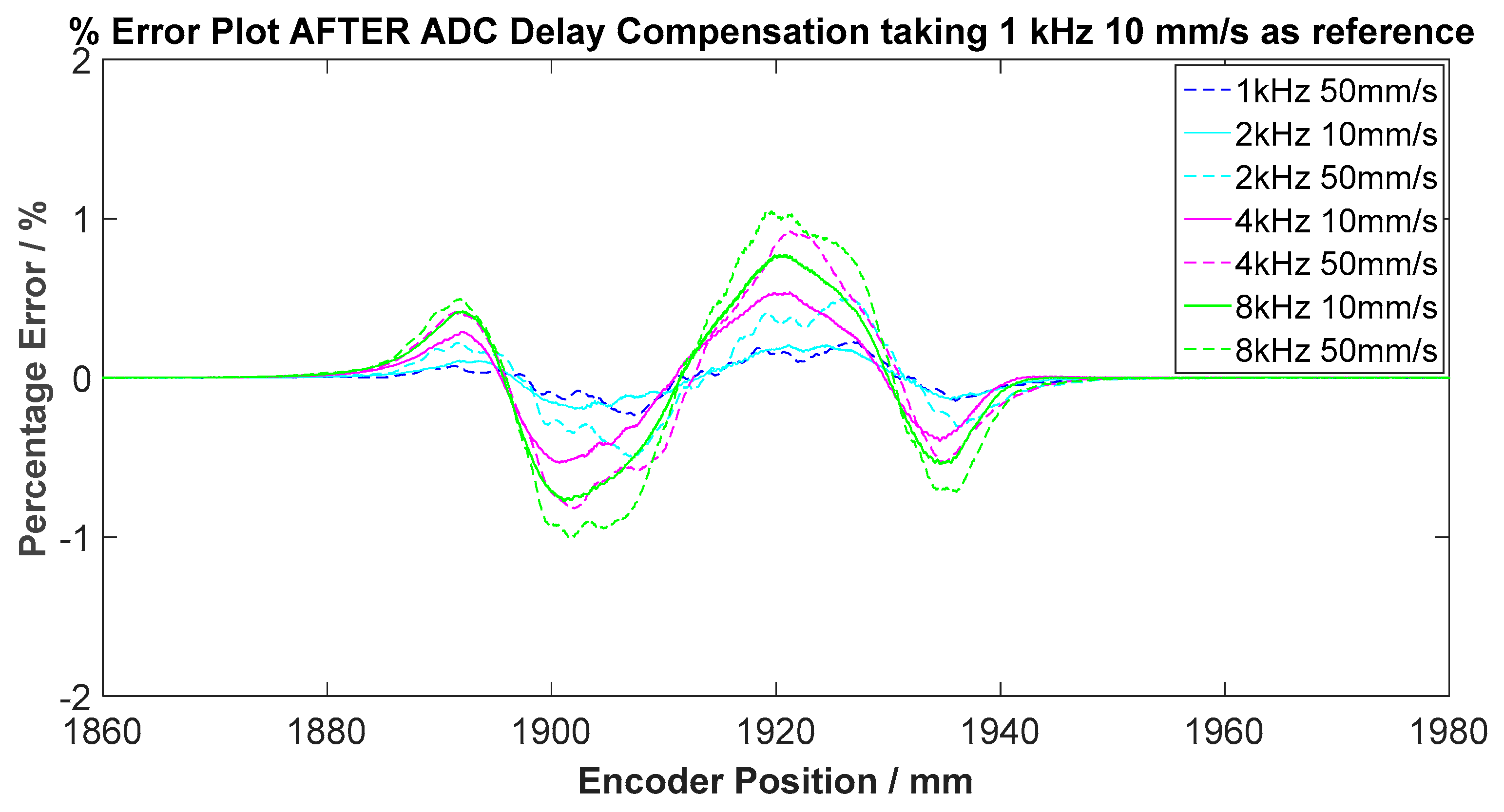
Calibration of the instrument at each output data rate was required, as the aliasing of the switching harmonics result in a magnitude difference of the output digitized signal due to the different attenuation factors at different output data rates.
Phase frequency analysis shows the occurrence of a group delay also dependent on the output data rate, which was constant for all frequency components of the analog input signal to the ADC due to the linear time invariant nature of the sinc3 filter. This delay was compensated prior to applying the calibration algorithm.
This article has given a very detailed analysis of the performance of a novel three-axes teslameter. In comparison to other commercially available products [
13], this instrument compares very well and offers advantages mainly in the integration of the analog-to-digital conversion and the spinning current analog readout circuit on the same board. An additional novelty is the integration of a digital interface to a Heidenhain linear absolute encoder, which provides synchronized position readings to magnetic field data. The novel three-axis teslameter is now commercially available under the name SENIS
® MLNT-3D - 3-Axis Miniature Low Noise Digital Magnetic Transducer [
14].

 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}