A Mobile Positioning Method Based on Deep Learning Techniques


Abstract
:1. Introduction
2. Related Work
3. Mobile Positioning System and Method
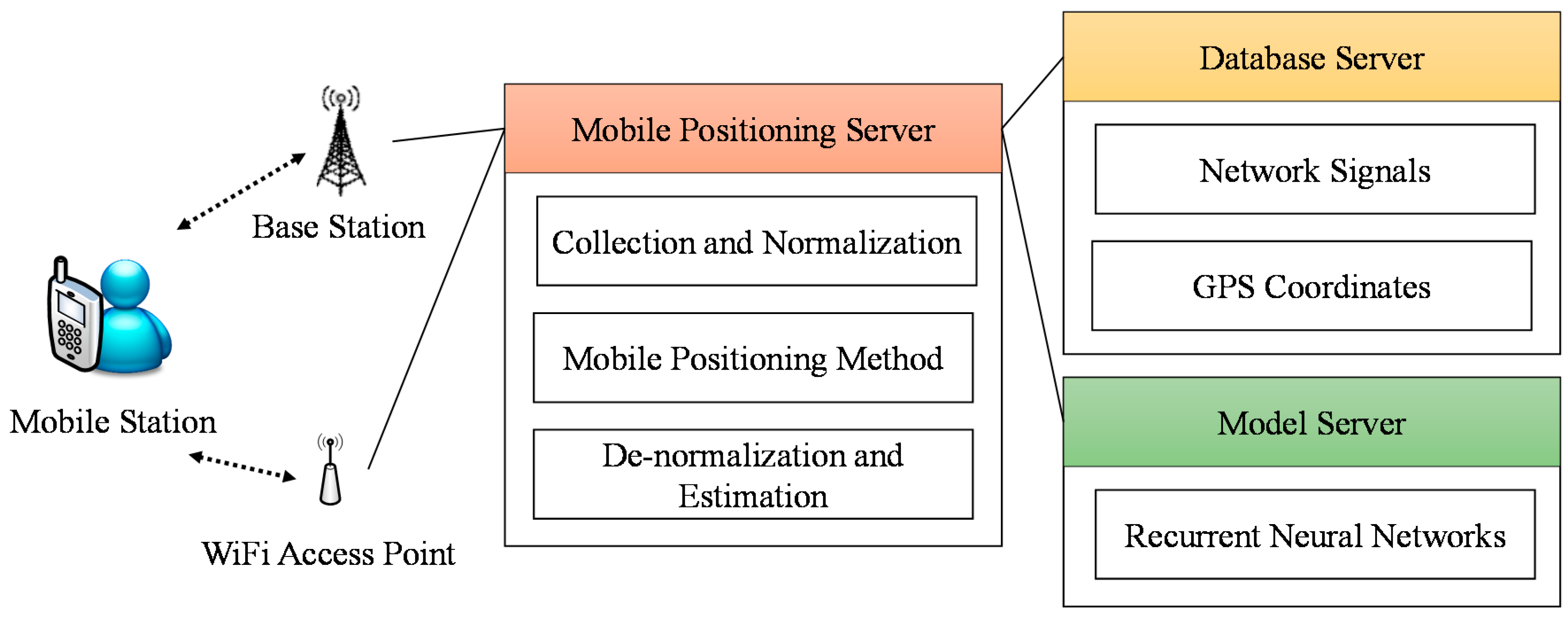
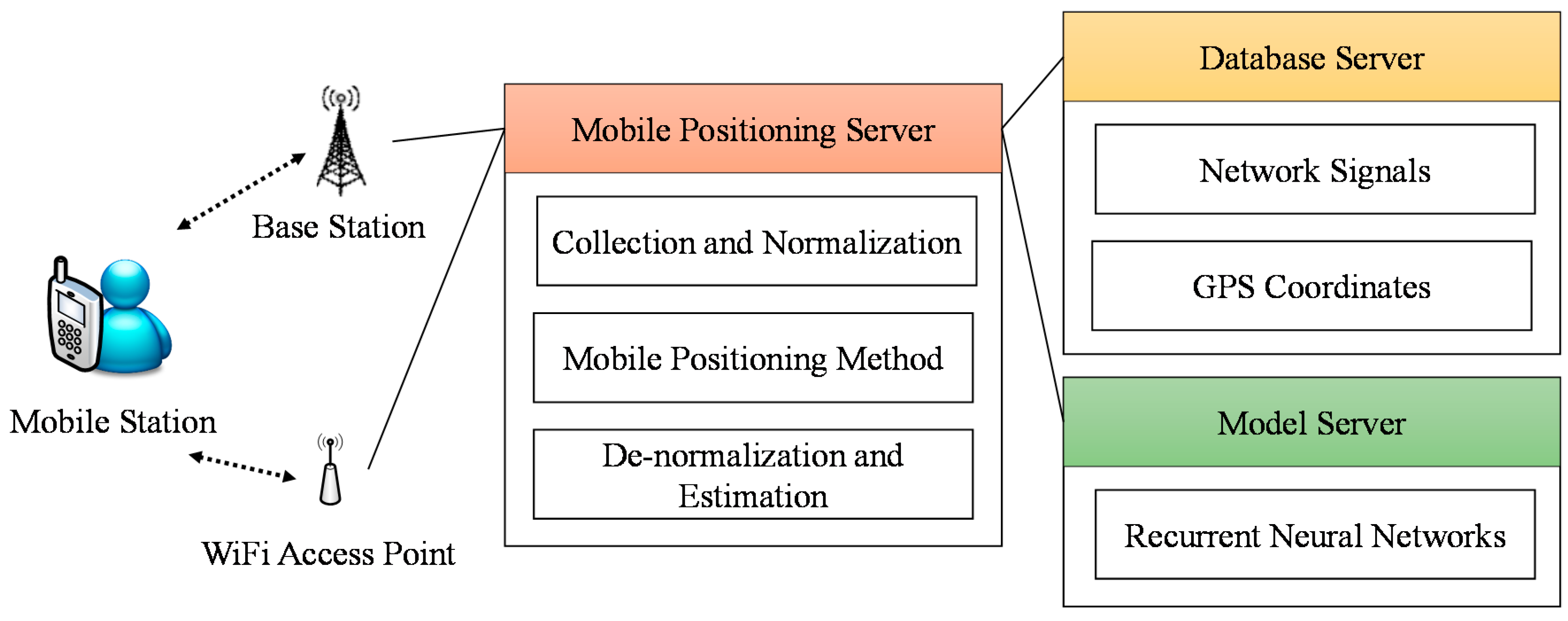
3.1. Mobile Positioning System
3.1.1. Mobile Stations
3.1.2. Mobile Positioning Server
3.1.3. Database Server
3.1.4. Model Server
3.2. Mobile Positioning Method
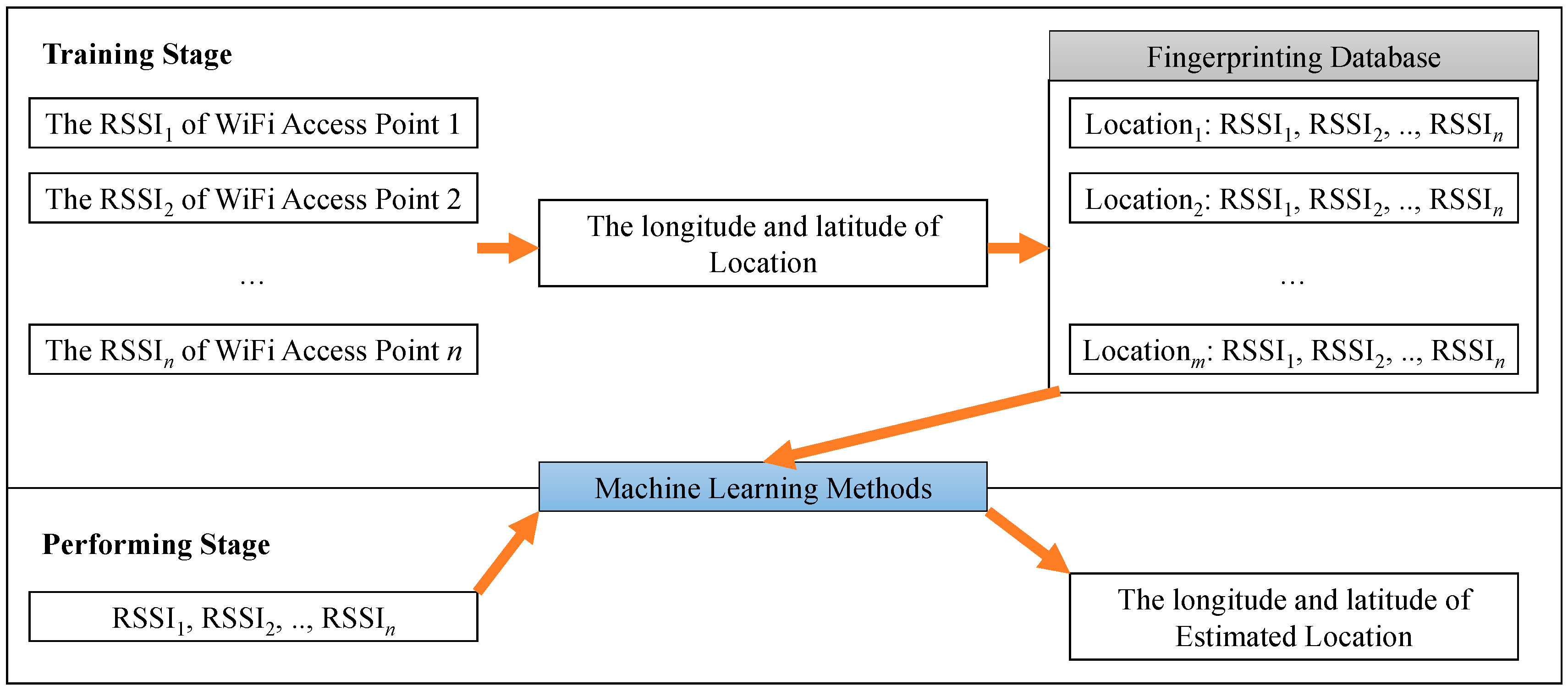
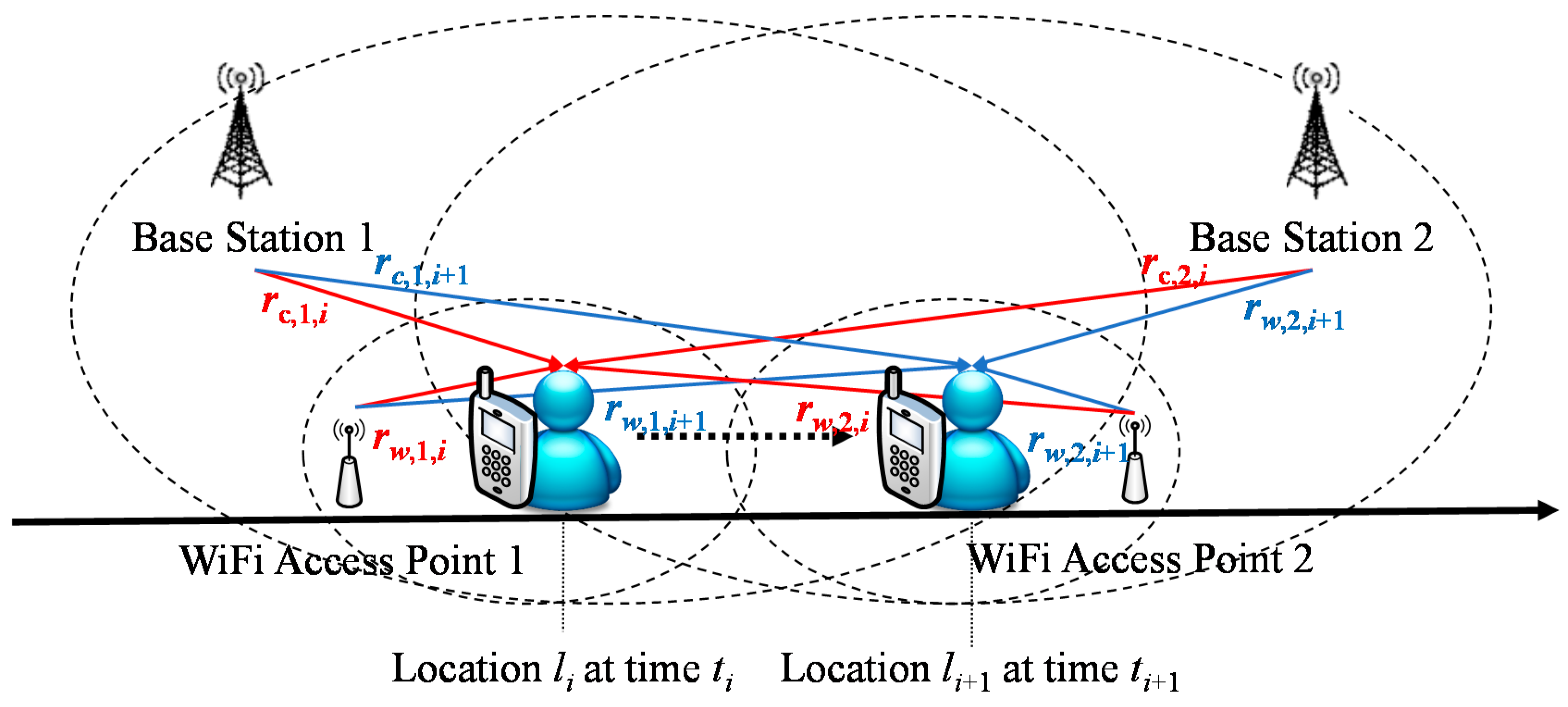
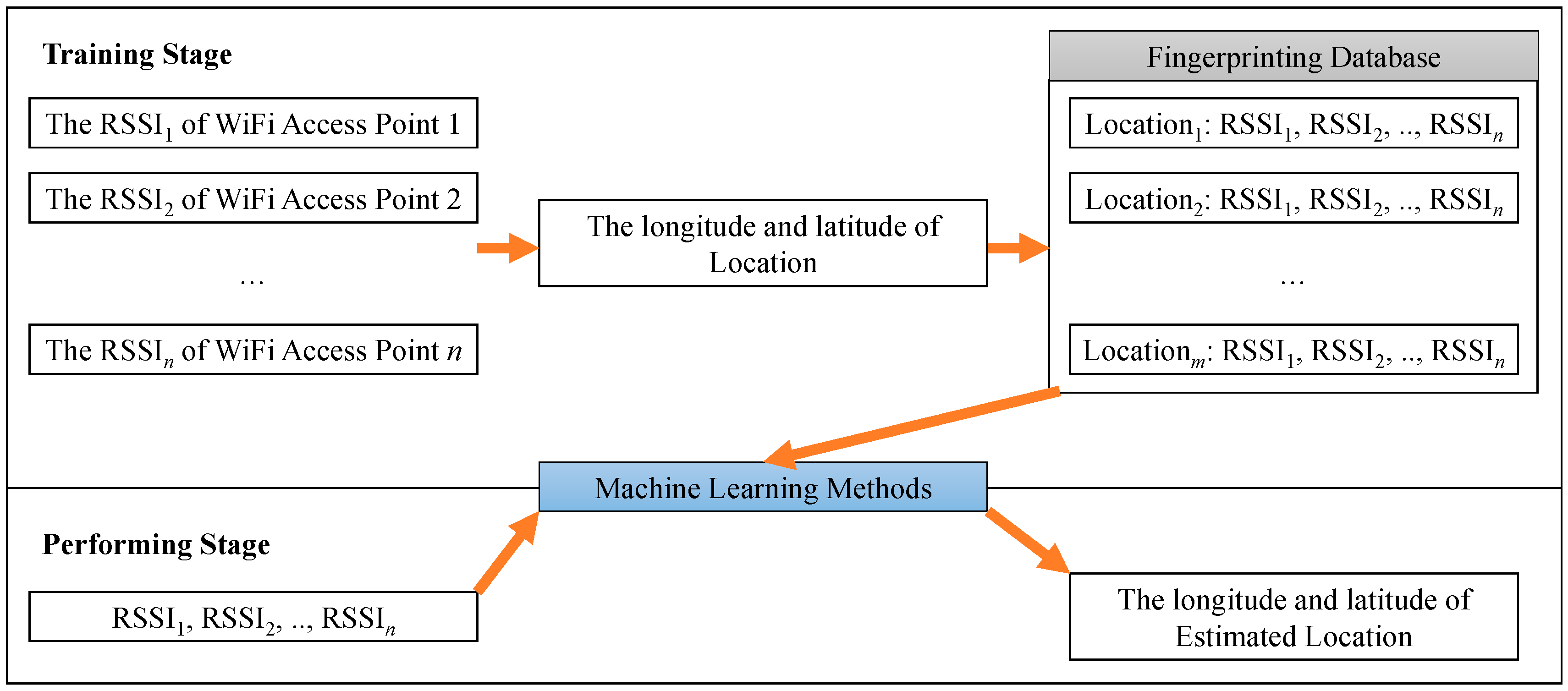
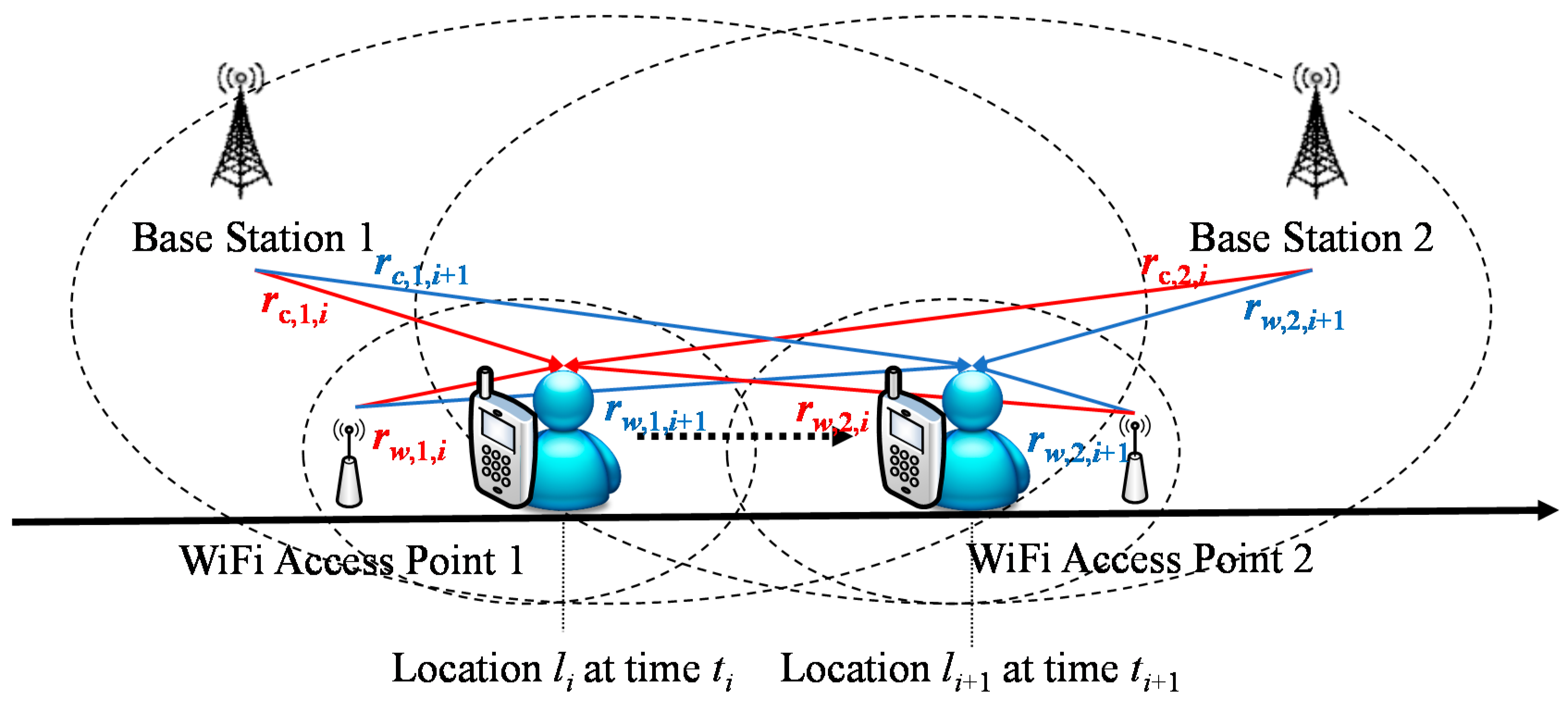
3.2.1. Collection and Normalization
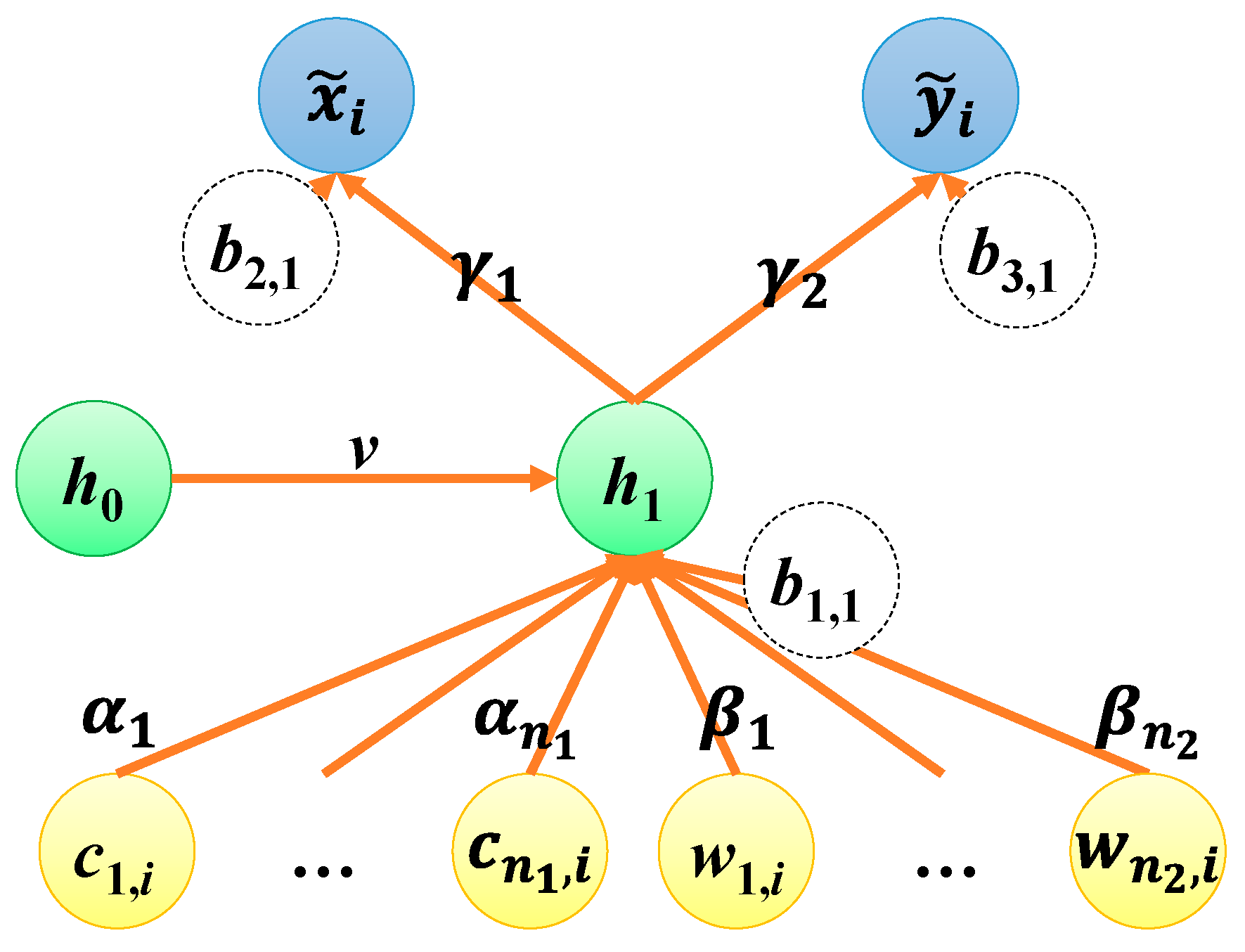
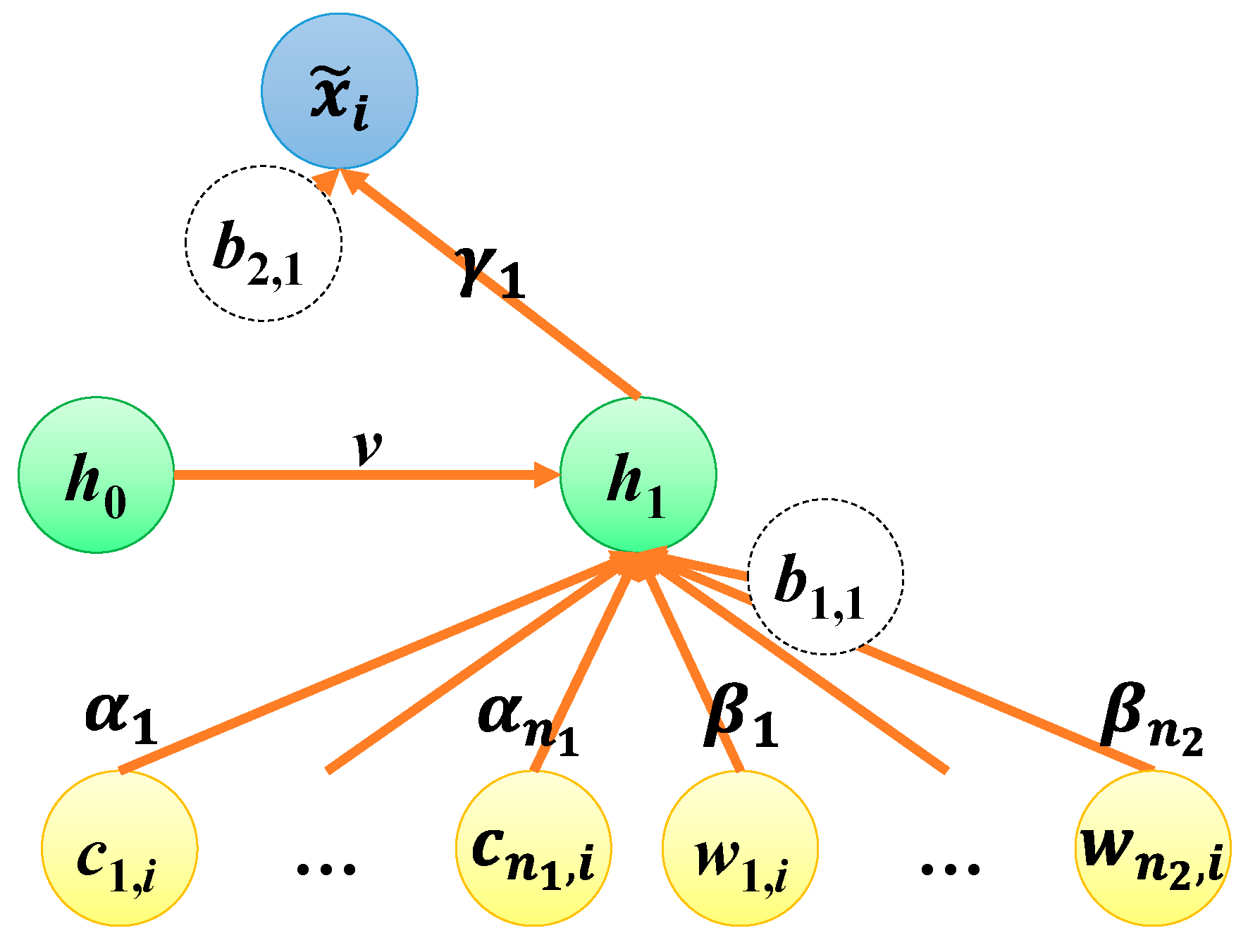
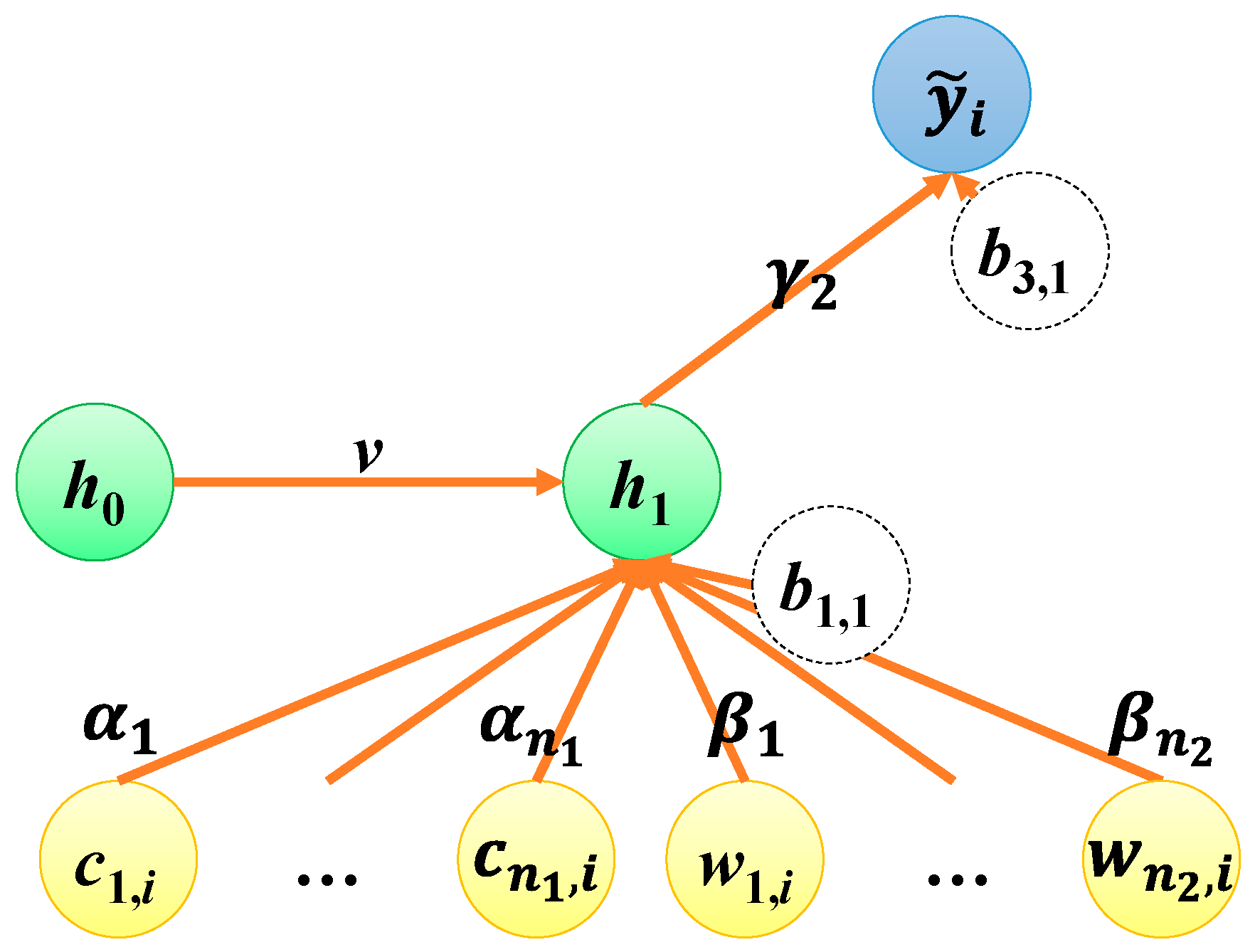
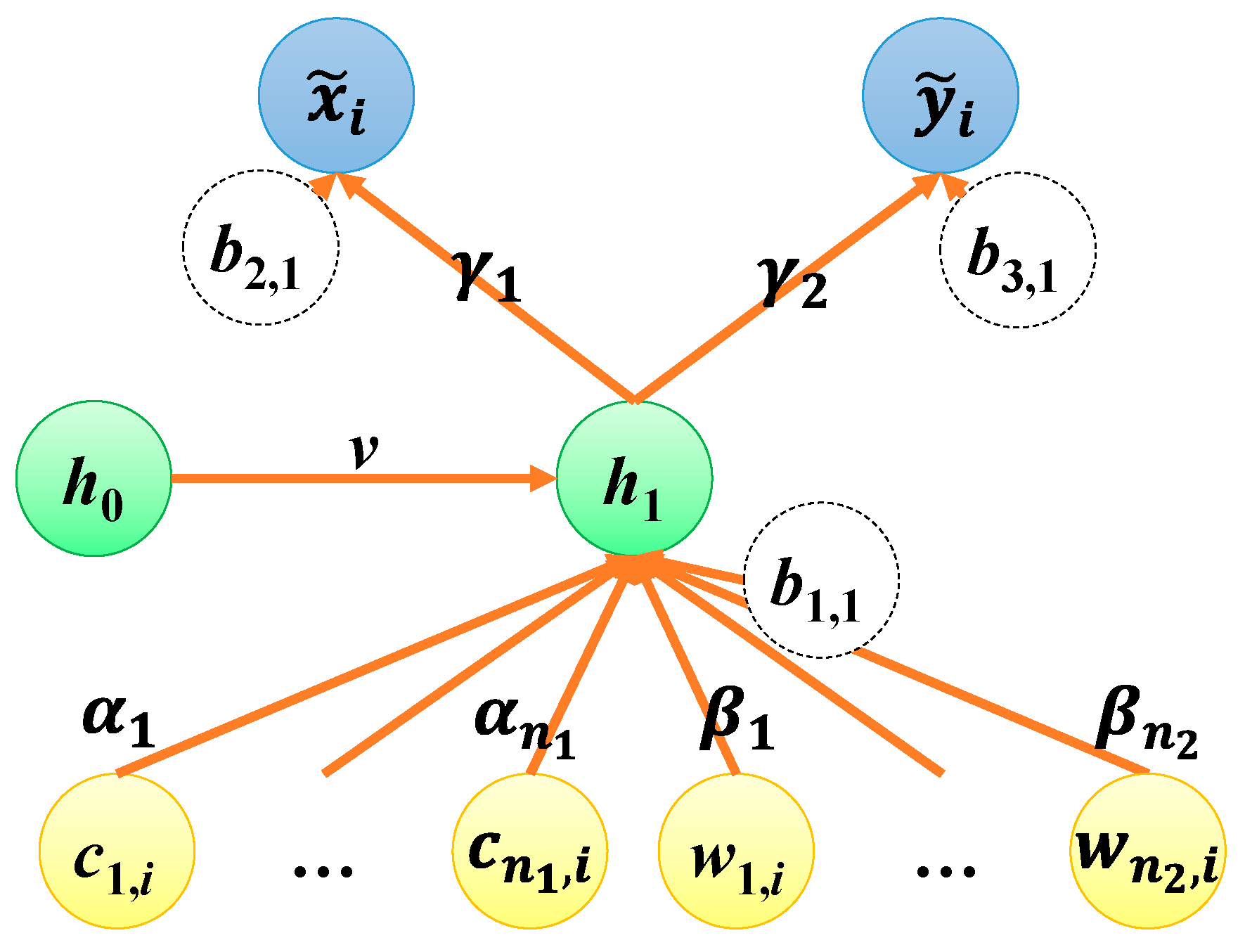
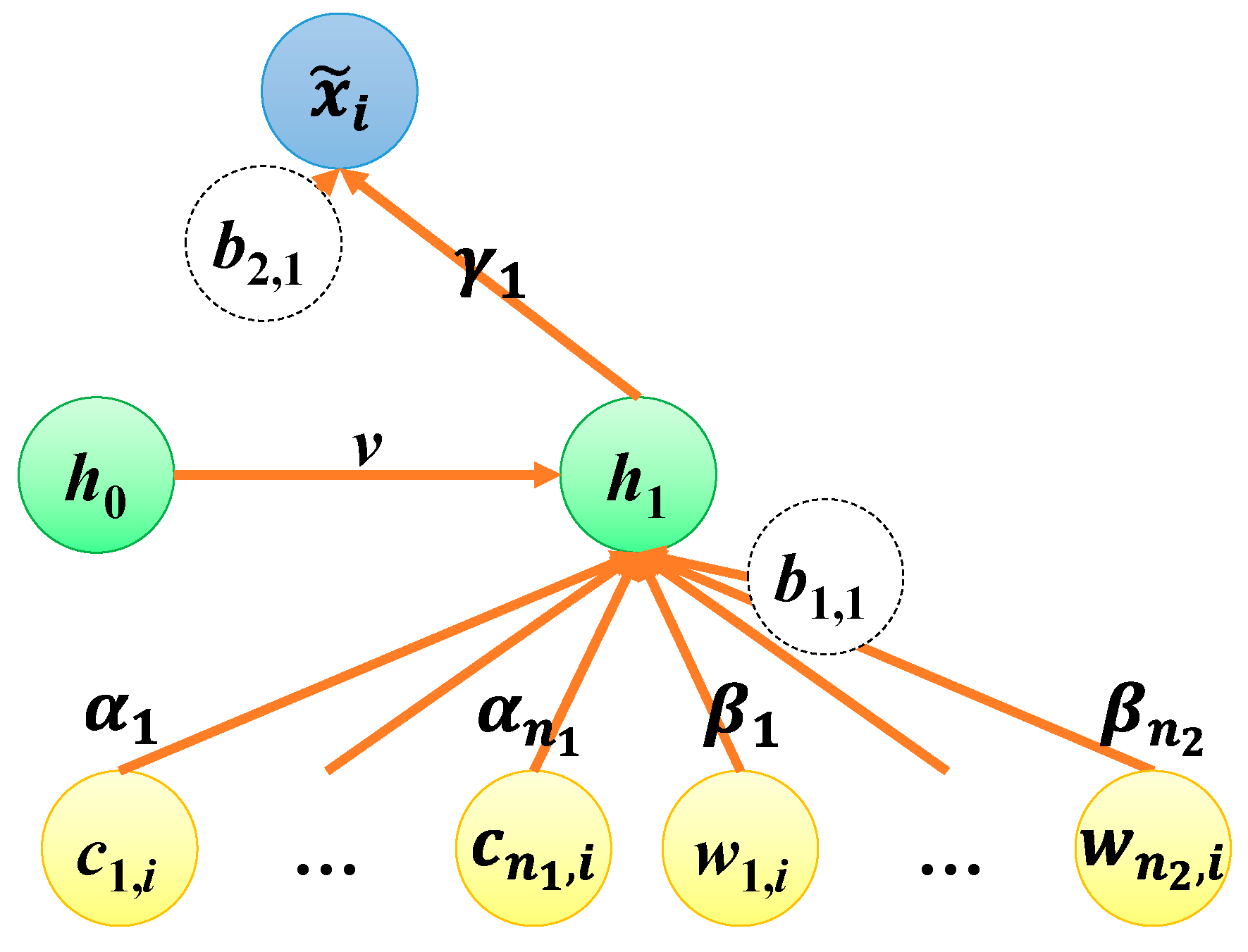
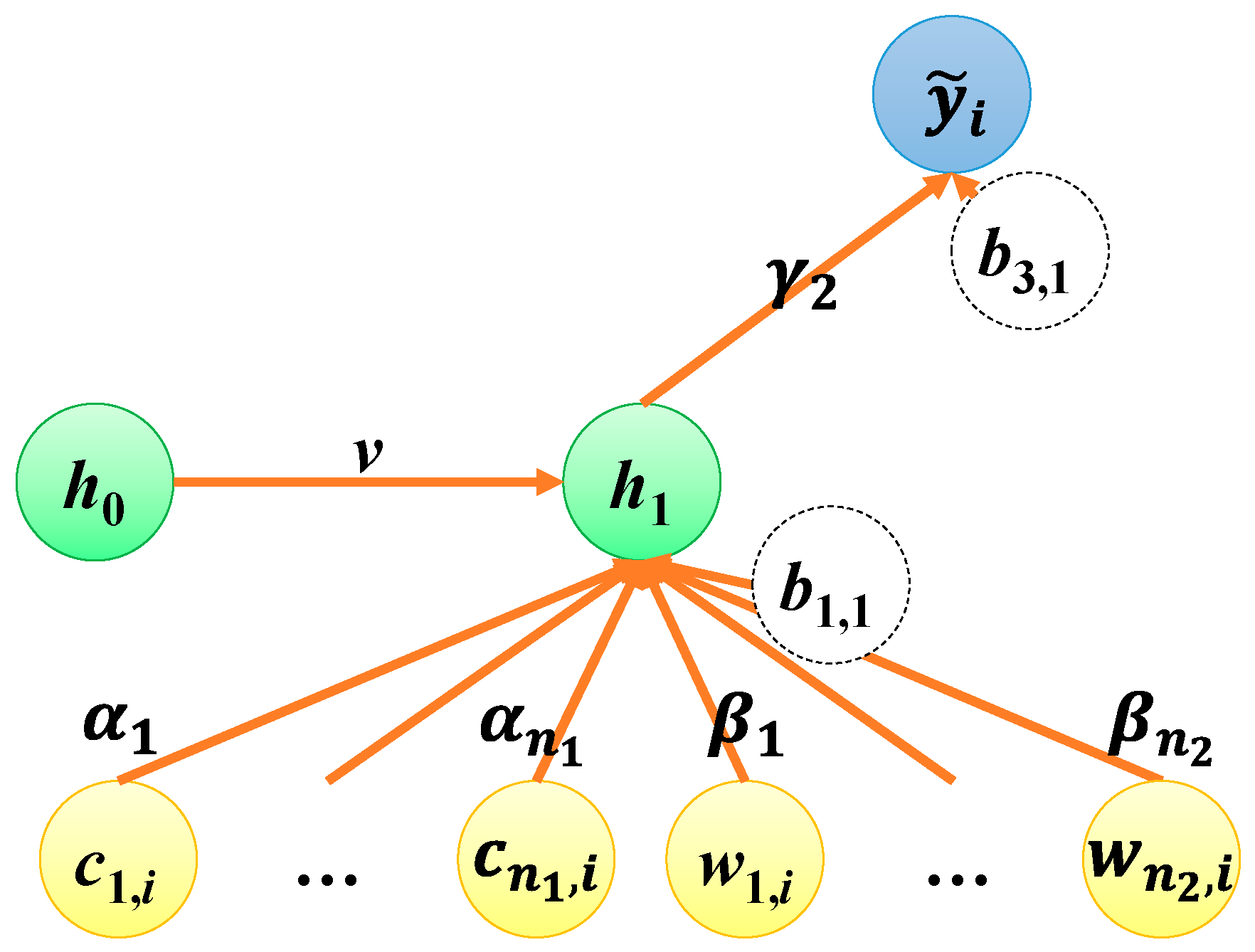
3.2.2. Mobile Positioning Method Based on Recurrent Neural Network
Recurrent Neural Networks with One Timestamp
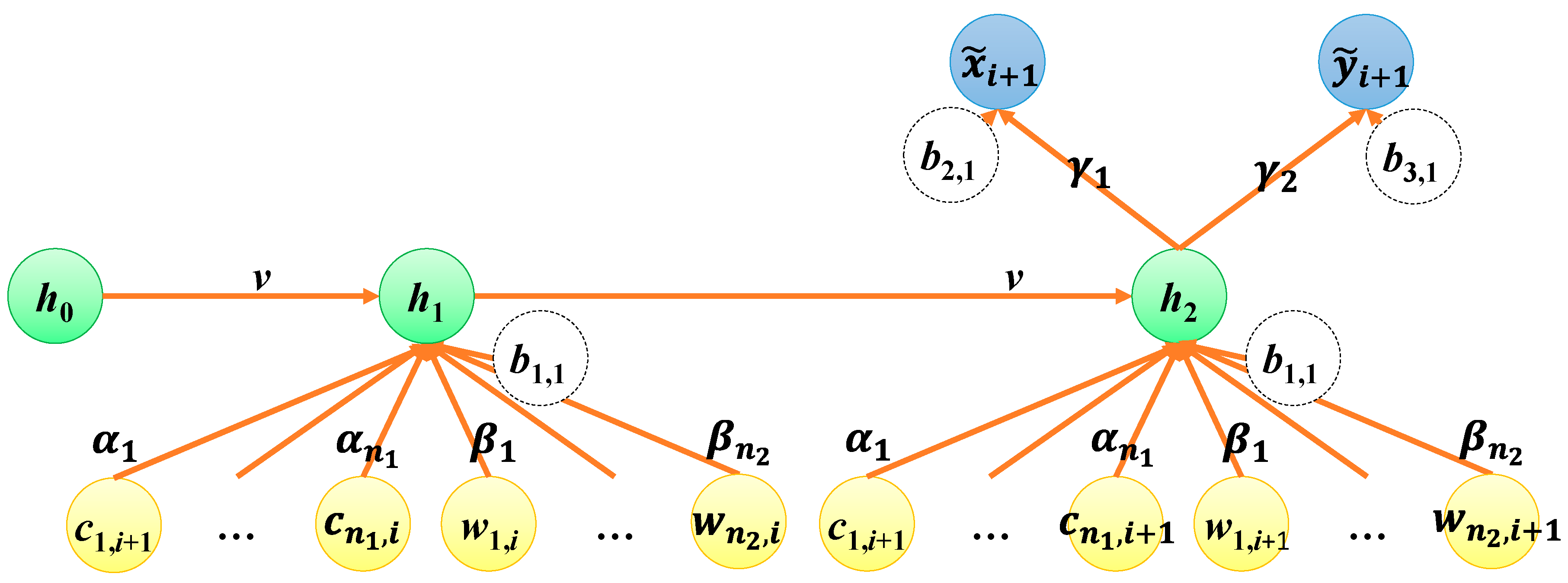
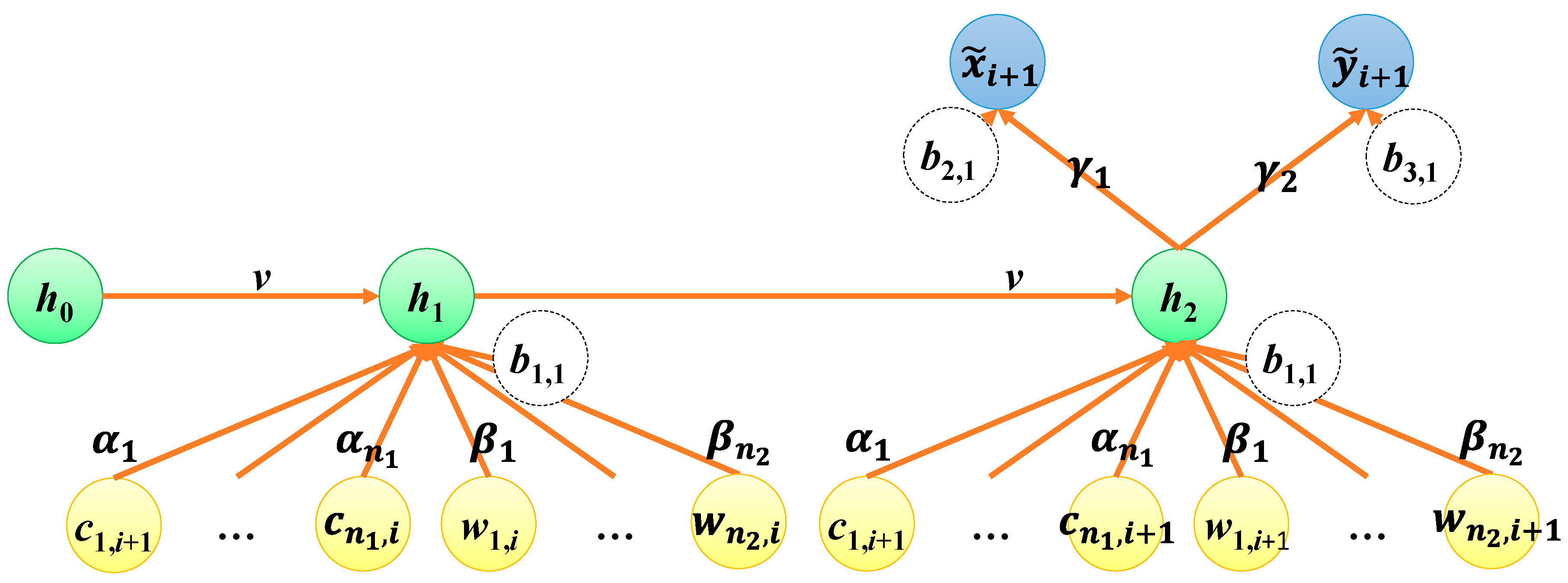
Two Timestamps for Recurrent Neural Network
3.2.3. De-Normalization and Estimation
4. Practical Experimental Results and Discussion
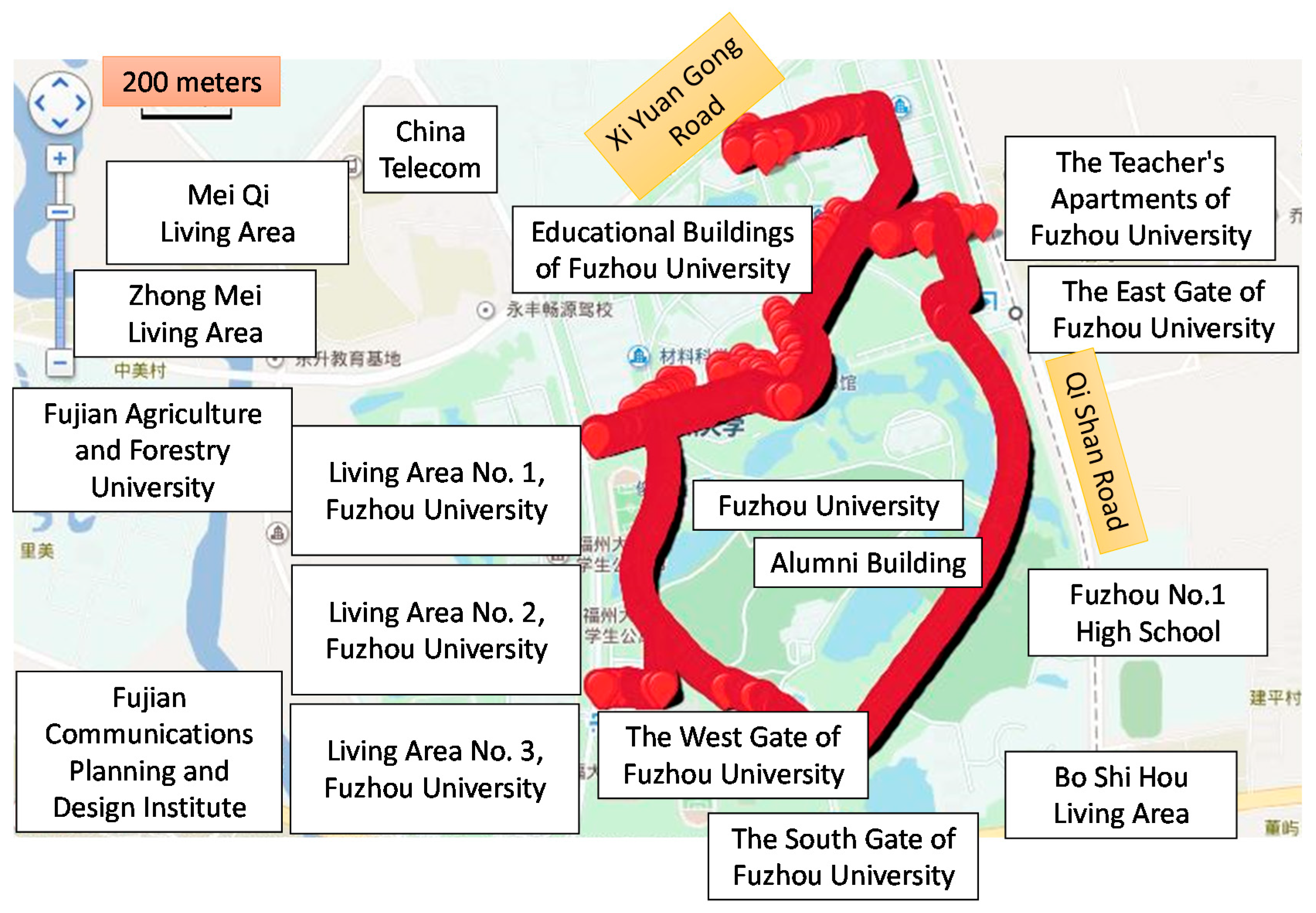
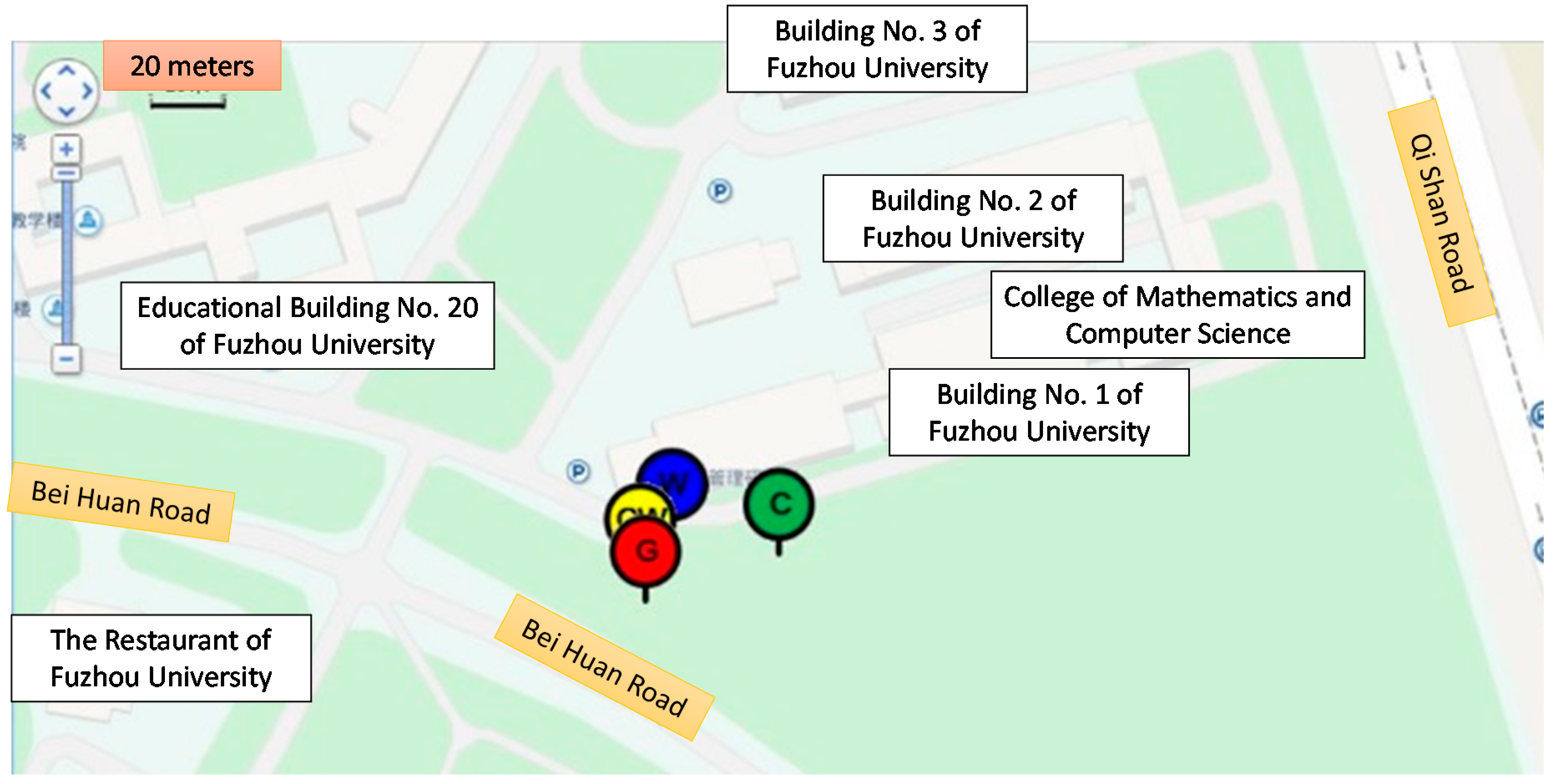
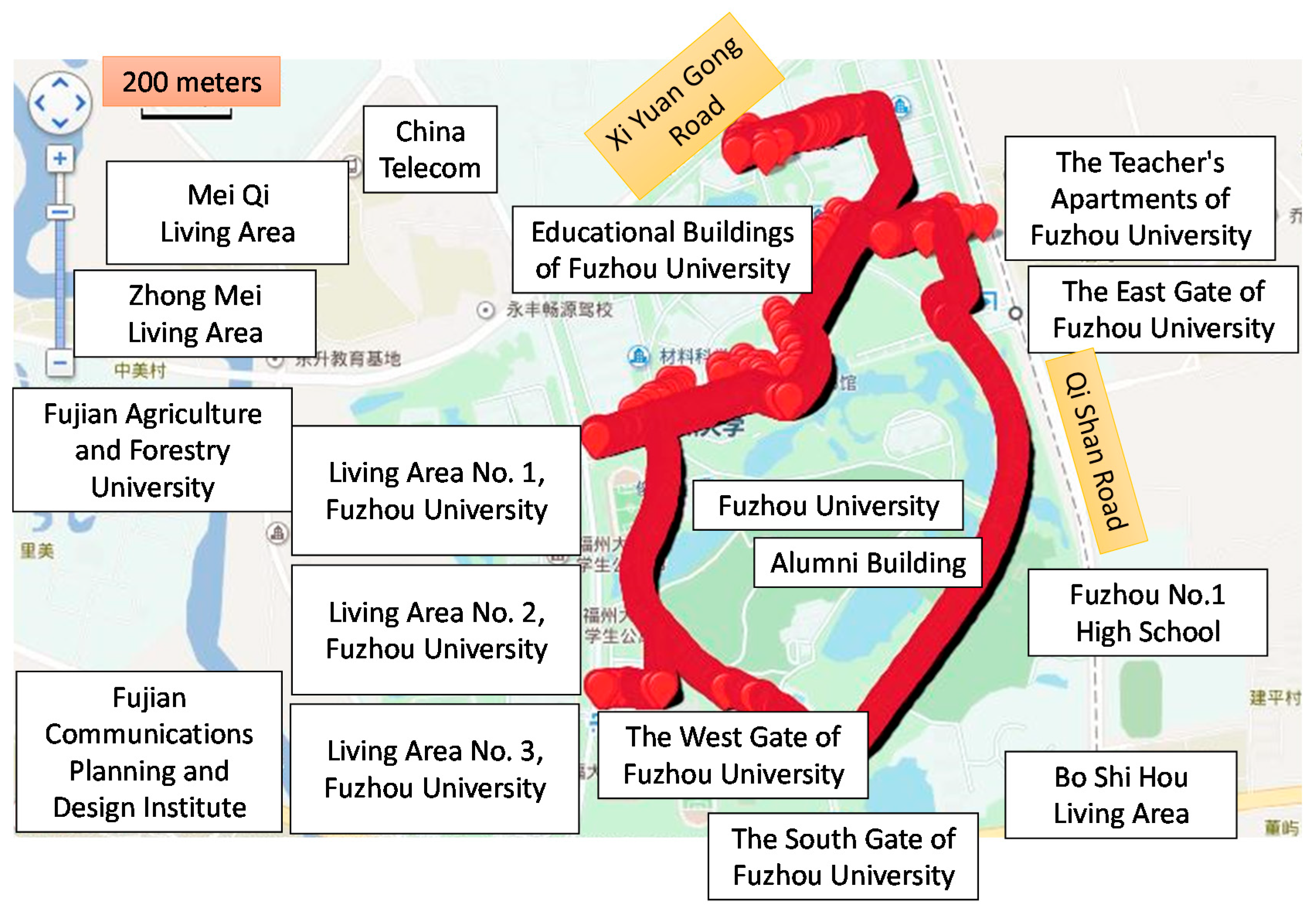
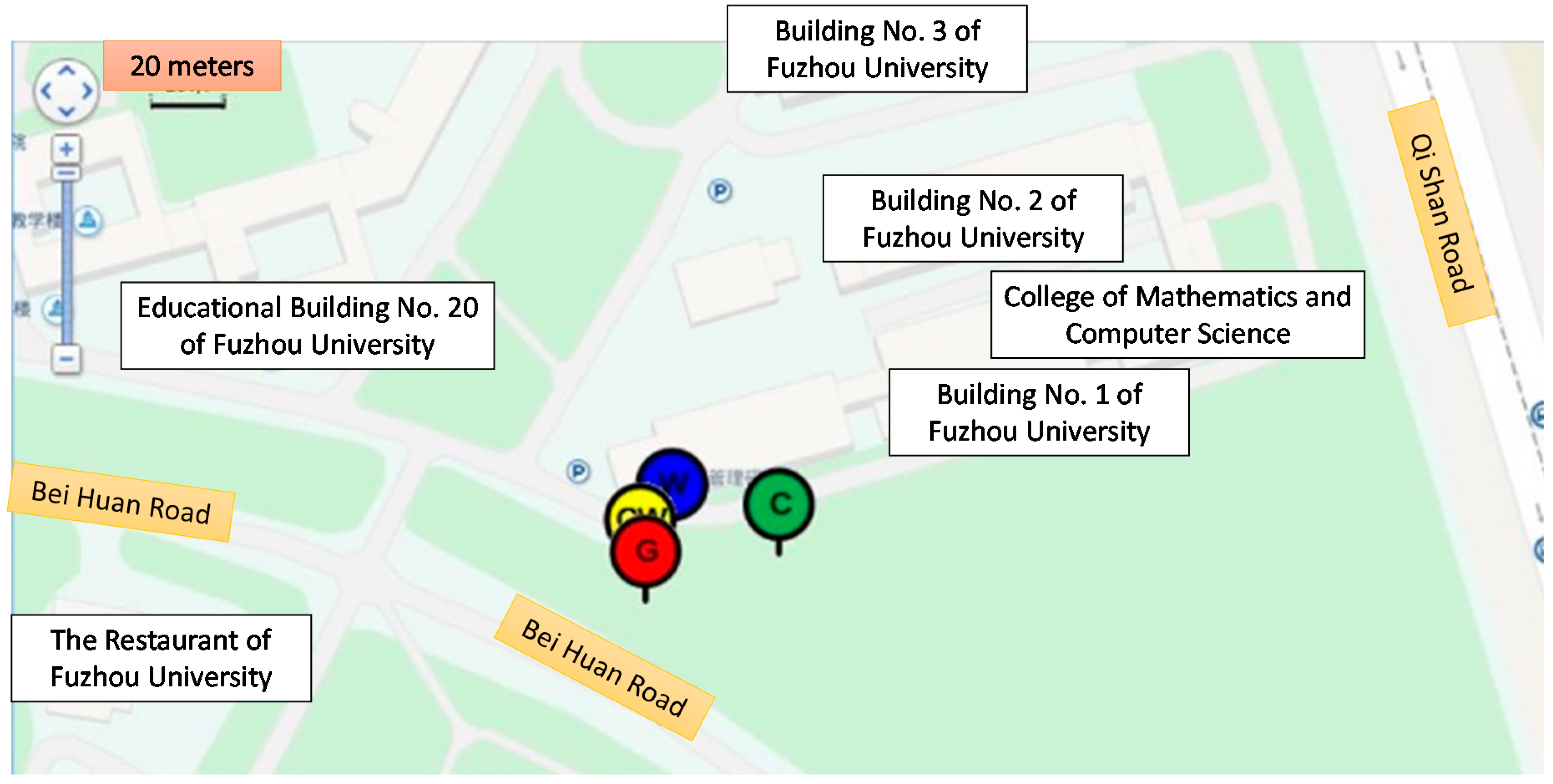
4.1. Practical Experimental Environments
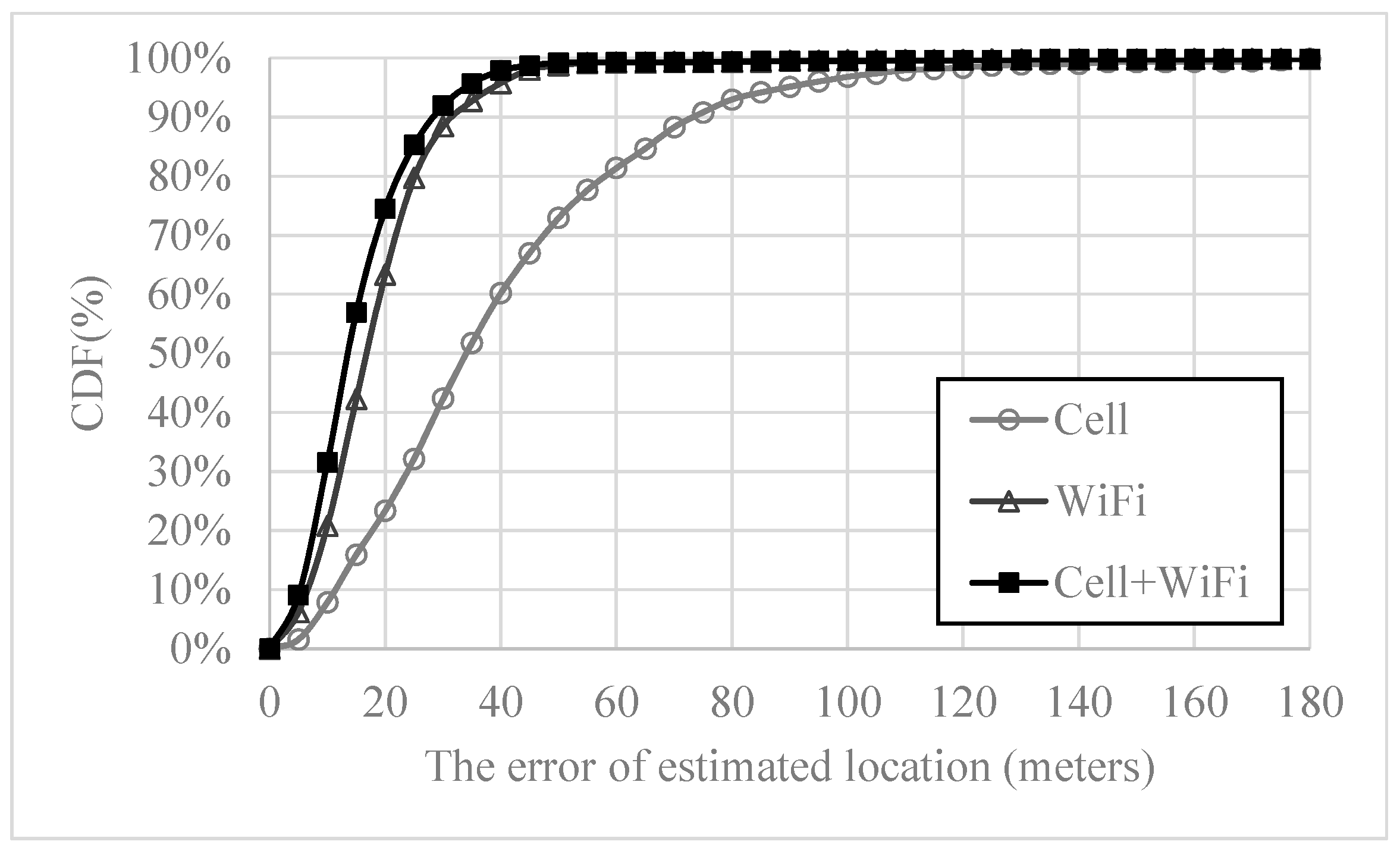
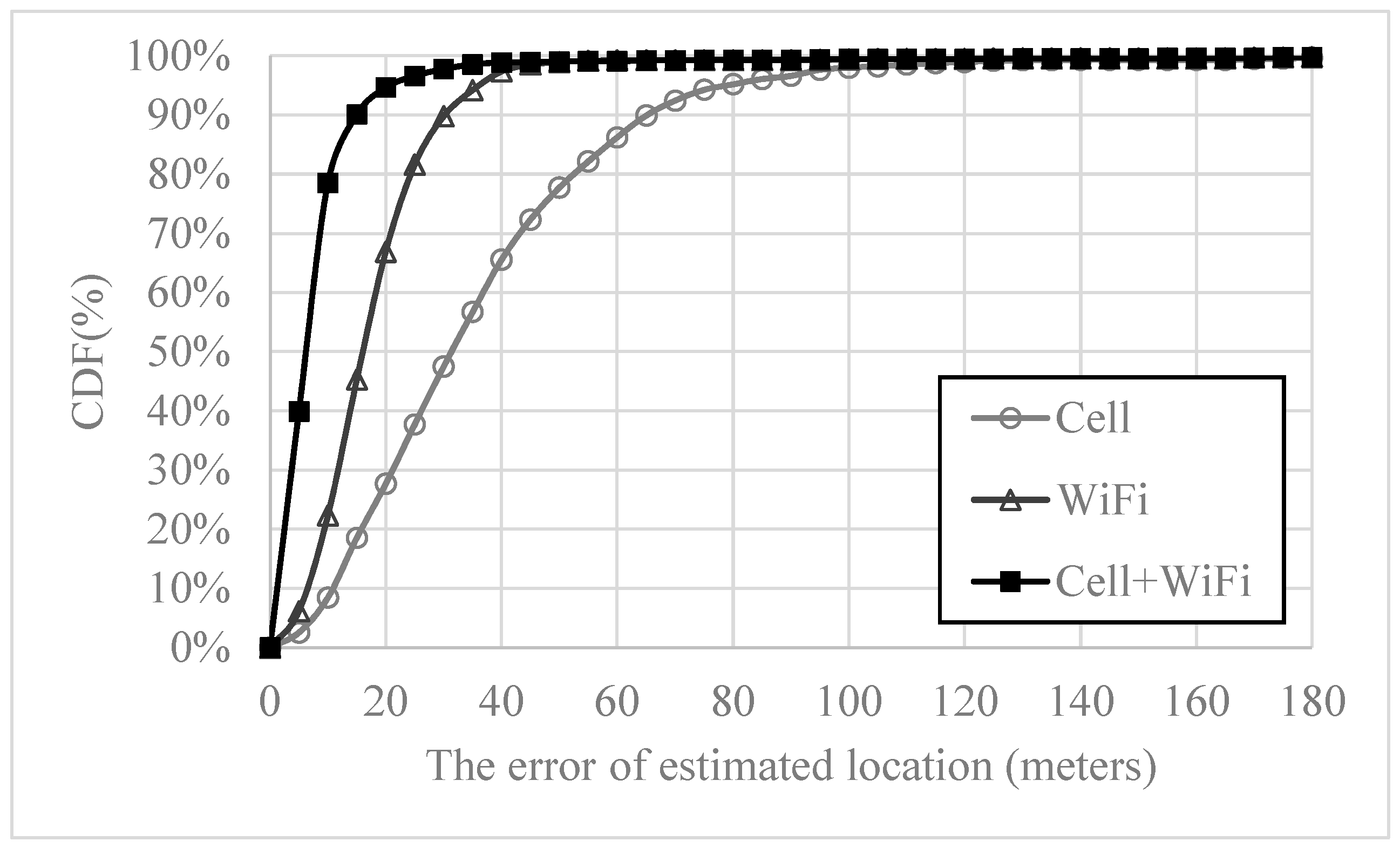
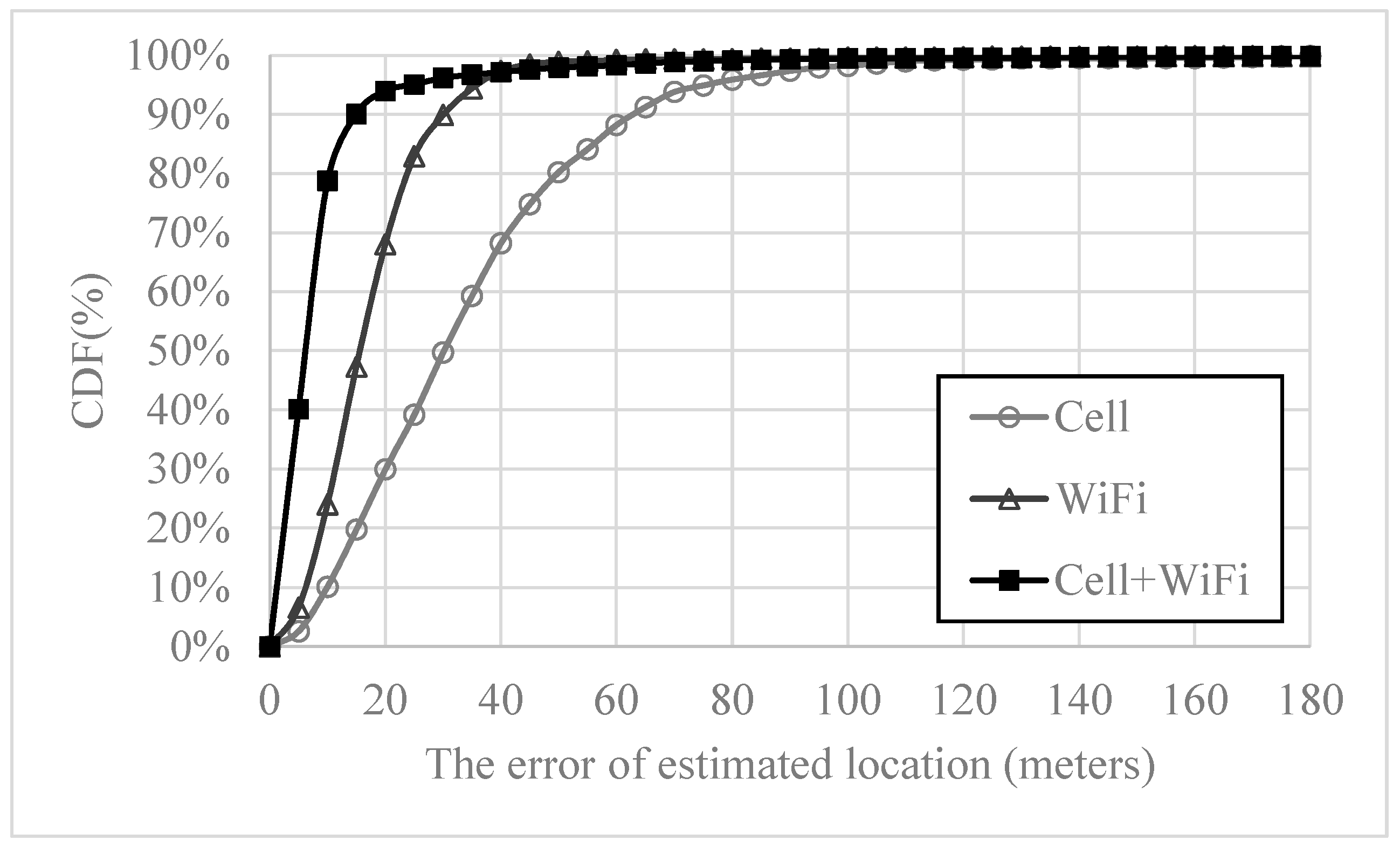
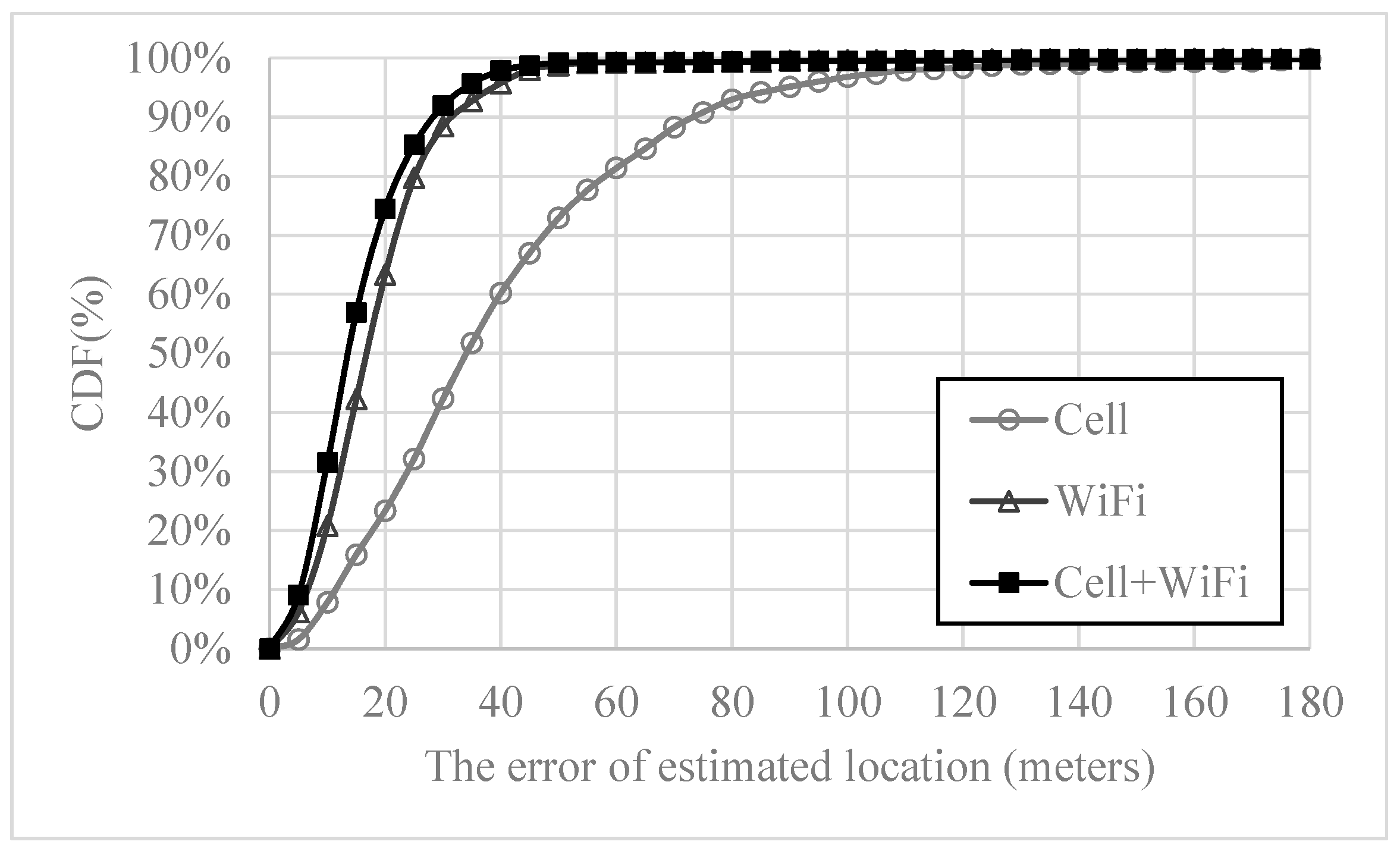
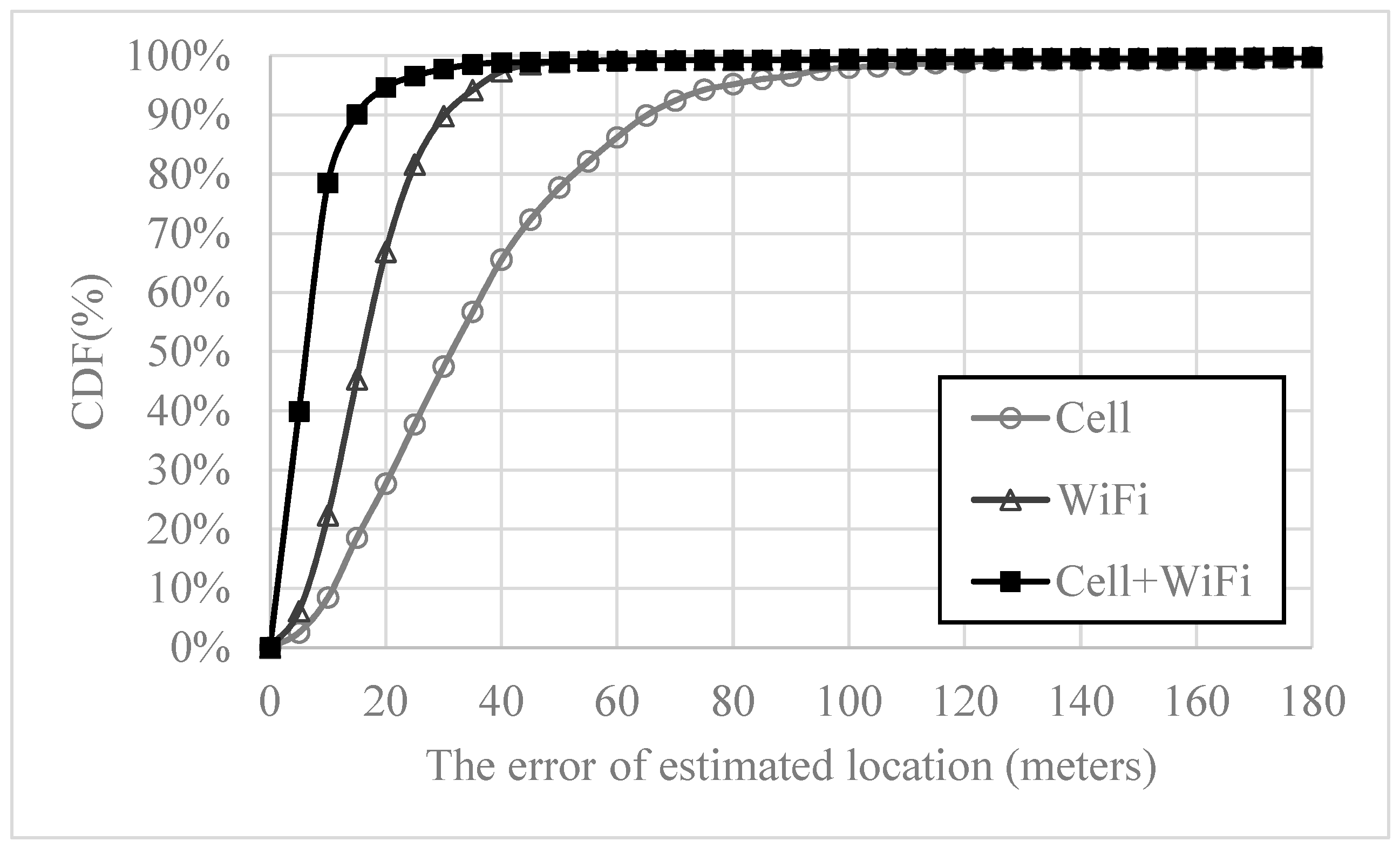
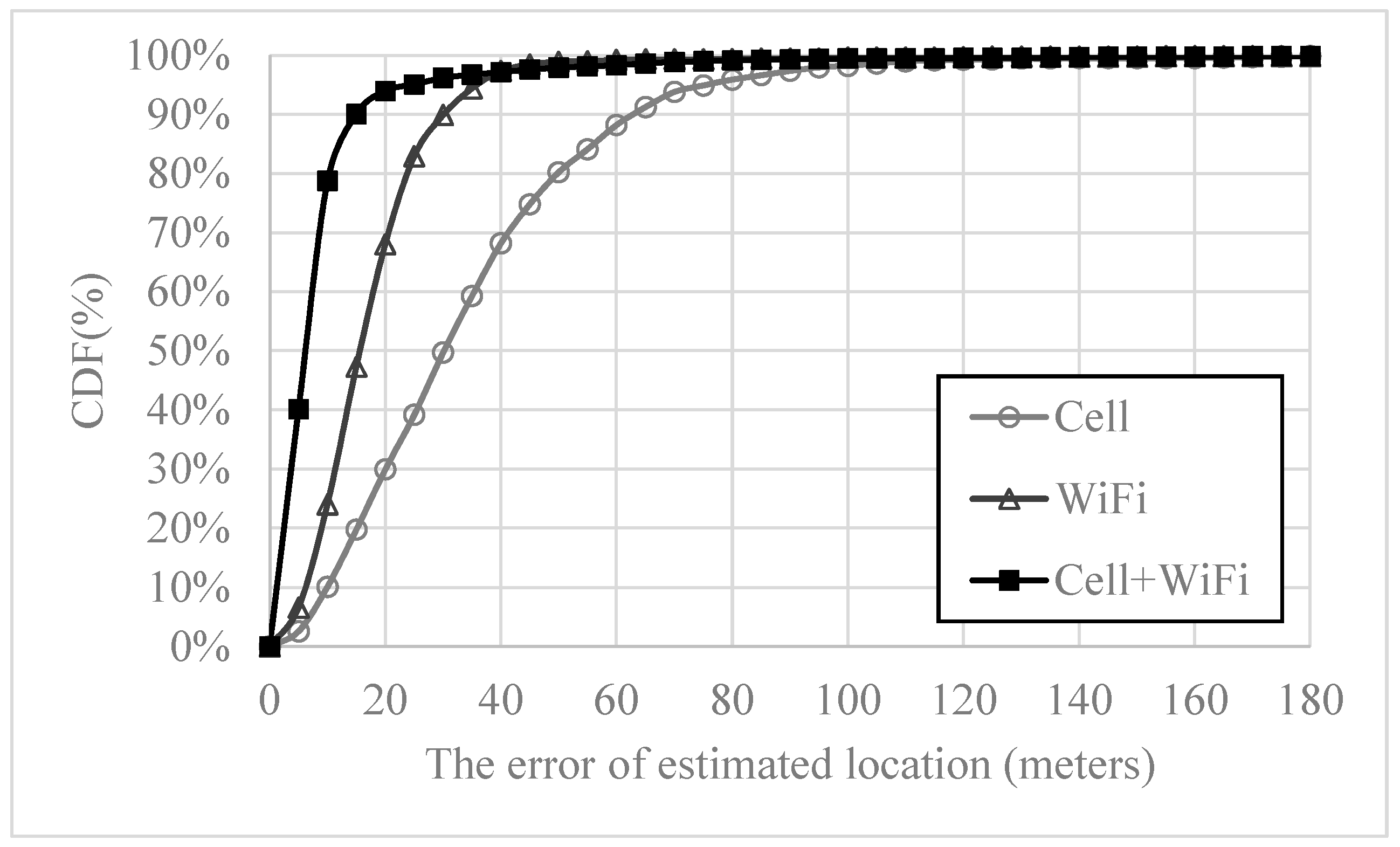
4.2. Practical Experimental Results
4.3. Discussions
4.3.1. The Structure of Neural Networks
4.3.2. The Loss Function of Deep Learning Models
4.3.3. Computation Time
4.3.4. Power Consumption
5. Conclusions and Future Work
5.1. Conclusions
5.2. Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Chen, C.H.; Lin, B.Y.; Lin, C.H.; Liu, Y.S.; Lo, C.C. A green positioning algorithm for Campus Guidance System. Int. J. Mob. Commun. 2012, 10, 119–131. [Google Scholar] [CrossRef]
- Wu, C.; Yang, Z.; Xu, Y.; Zhao, Y.; Liu, Y. Human mobility enhances global positioning accuracy for mobile phone localization. IEEE Trans. Parallel Distrib. Syst. 2015, 26, 131–141. [Google Scholar] [CrossRef]
- Thejaswini, M.; Rajalakshmi, P.; Desai, U.B. Novel sampling algorithm for human mobility-based mobile phone sensing. IEEE Internet Things J. 2015, 2, 210–220. [Google Scholar] [CrossRef]
- Molina, B.; Olivares, E.; Palau, C.E.; Esteve, M. A multimodal fingerprint-based indoor positioning system for airports. IEEE Access 2018, 6, 10092–10106. [Google Scholar] [CrossRef]
- Chen, K.; Wang, C.; Yin, Z.; Jiang, H.; Tan, G. Slide: Towards fast and accurate mobile fingerprinting for Wi-Fi indoor positioning systems. IEEE Sens. J. 2018, 18, 1213–1223. [Google Scholar] [CrossRef]
- Liu, D.; Sheng, B.; Hou, F.; Rao, W.; Liu, H. From wireless positioning to mobile positioning: An overview of recent advances. IEEE Syst. J. 2014, 8, 1249–1259. [Google Scholar] [CrossRef]
- Taniuchi, D.; Liu, X.; Nakai, D.; Maekawa, T. Spring model based collaborative indoor position estimation with neighbor mobile devices. IEEE J. Sel. Top. Signal Process. 2015, 9, 268–277. [Google Scholar] [CrossRef]
- Mok, E.; Cheung, B.K.S. An improved neural network training algorithm for Wi-Fi fingerprinting positioning. ISPRS Int. J. Geo-Inf. 2013, 2, 854–868. [Google Scholar] [CrossRef]
- Chen, C.H.; Lin, J.H.; Kuan, T.S.; Lo, K.R. A high-efficiency method of mobile positioning based on commercial vehicle operation data. ISPRS Int. J. Geo-Inf. 2016, 5, 82. [Google Scholar] [CrossRef]
- Xia, S.; Liu, Y.; Yuan, G.; Zhu, M.; Wang, Z. Indoor fingerprint positioning based on Wi-Fi: An overview. ISPRS Int. J. Geo-Inf. 2017, 6, 135. [Google Scholar] [CrossRef]
- Chen, C.Y.; Yin, L.P.; Chen, Y.J.; Hwang, R.C. A modified probability neural network indoor positioning technique. In Proceedings of the 2012 IEEE International Conference on Information Security and Intelligent Control, Yunlin, Taiwan, 14–16 August 2012. [Google Scholar] [CrossRef]
- Xu, Y.; Sun, Y. Neural network-based accuracy enhancement method for WLAN indoor positioning. In Proceedings of the 2012 IEEE Vehicular Technology Conference, Quebec City, QC, Canada, 3–6 September 2012. [Google Scholar] [CrossRef]
- Zhang, T.; Man, Y. The enhancement of WiFi fingerprint positioning using convolutional neural network. In Proceedings of the 2018 International Conference on Computer, Communication and Network Technology, Wuzhen, China, 29–30 June 2018. [Google Scholar] [CrossRef]
- Zhu, J.Y.; Xu, J.; Zheng, A.X.; He, J.; Wu, C.; Li, V.O.K. WIFI fingerprinting indoor localization system based on spatio-temporal (S-T) metrics. In Proceedings of the 2014 IEEE International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014. [Google Scholar] [CrossRef]
- Lukito, Y.; Chrismanto, A.R. Recurrent neural networks model for WiFi-based indoor positioning system. In Proceedings of the 2017 IEEE International Conference on Smart Cities, Automation & Intelligent Computing Systems, Yogyakarta, Indonesia, 8–10 November 2017. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. DeepFi: Deep learning for indoor fingerprinting using channel state information. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 9–12 March 2015. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project. Technical Specification Group Services and System Aspects. Location Services (LCS); Service Description; Stage 1 (Release 15). 2018. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=584 (accessed on 23 November 2018).
- Khatab, Z.E.; Hajihoseini, A.; Ghorashi, S.A. A fingerprint method for indoor localization using autoencoder based deep extreme learning machine. IEEE Sens. Lett. 2018, 2, 6000204. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based fingerprinting for indoor localization: A deep learning approach. IEEE Trans. Veh. Technol. 2017, 66, 763–776. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S. CSI phase fingerprinting for indoor localization with a deep learning approach. IEEE Internet Things J. 2016, 3, 135. [Google Scholar] [CrossRef]
- Shao, W.; Luo, H.; Zhao, F.; Ma, Y.; Zhao, Z.; Crivello, A. Indoor positioning based on fingerprint-image and deep learning. IEEE Access 2018. [Google Scholar] [CrossRef]
- Xiao, C.; Yang, D.; Chen, Z.; Tan, G. 3-D BLE Indoor localization based on denoising autoencoder. IEEE Access 2017, 5, 12751–12760. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.H. Reducing the dimensionality of time-series data with deep learning techniques. Science 2018. Available online: http://science.sciencemag.org/content/313/5786/504/tab-e-letters (accessed on 10 October 2018).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Timestamps | Only Cellular Networks | Only Wi-Fi Networks | Cellular and Wi-Fi Networks |
|---|---|---|---|
| 1 timestamp | 39.88 | 18.88 | 16.21 |
| 2 timestamps | 36.51 | 18.69 | 9.19 |
| 3 timestamps | 34.57 | 17.83 | 9.26 |
| Number of Timestamps | 641-10-2 | 641-20-2 | 641-30-2 | 641-40-2 |
|---|---|---|---|---|
| 1 timestamp | 16.23 | 16.30 | 16.21 | 16.27 |
| 2 timestamps | 12.07 | 10.87 | 9.19 | 12.09 |
| 3 timestamps | 11.60 | 10.56 | 9.26 | 11.55 |
| Number of Timestamps | Only Cellular Networks | Only Wi-Fi Networks | Cellular and Wi-Fi Networks |
|---|---|---|---|
| 1 | 34.61 | 16.46 | 14.39 |
| 2 | 259.44 | 255.87 | 252.53 |
| 3 | 254.85 | 256.61 | 253.85 |
| Number of Timestamps | Only Cellular Networks | Only Wi-Fi Networks | Cellular and Wi-Fi Networks |
|---|---|---|---|
| 1 | 3022 | 6928 | 7302 |
| 2 | 5383 | 13,513 | 14,533 |
| 3 | 6156 | 17,938 | 20,485 |
| Number of Timestamps | Only Cellular Networks | Only Wi-Fi Networks | Cellular and Wi-Fi Networks |
|---|---|---|---|
| 1 | 0.15 | 0.35 | 0.37 |
| 2 | 0.27 | 0.68 | 0.73 |
| 3 | 0.31 | 0.90 | 1.02 |
| Enable Modules | Sampling Period | Lifetime (Seconds) |
|---|---|---|
| Cellular | Continuous (1/s) | 254,500 |
| Cellular and Wi-Fi | Continuous (1/s) | 175,450 |
| Cellular and GPS | Continuous (1/s) | 81,000 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Chen, C.-H.; Zhang, Q. A Mobile Positioning Method Based on Deep Learning Techniques. Electronics 2019, 8, 59. https://doi.org/10.3390/electronics8010059
Wu L, Chen C-H, Zhang Q. A Mobile Positioning Method Based on Deep Learning Techniques. Electronics. 2019; 8(1):59. https://doi.org/10.3390/electronics8010059
Chicago/Turabian StyleWu, Ling, Chi-Hua Chen, and Qishan Zhang. 2019. "A Mobile Positioning Method Based on Deep Learning Techniques" Electronics 8, no. 1: 59. https://doi.org/10.3390/electronics8010059
APA StyleWu, L., Chen, C.-H., & Zhang, Q. (2019). A Mobile Positioning Method Based on Deep Learning Techniques. Electronics, 8(1), 59. https://doi.org/10.3390/electronics8010059