A Controlled-Environment Quality Assessment of Android GNSS Raw Measurements




Abstract
1. Introduction
2. GNSS Positioning and Basic Performance of Android Smartphones
2.1. Pseudorange Measurements in GNSS Receivers
2.2. Positioning and Navigation with Android Smartphones
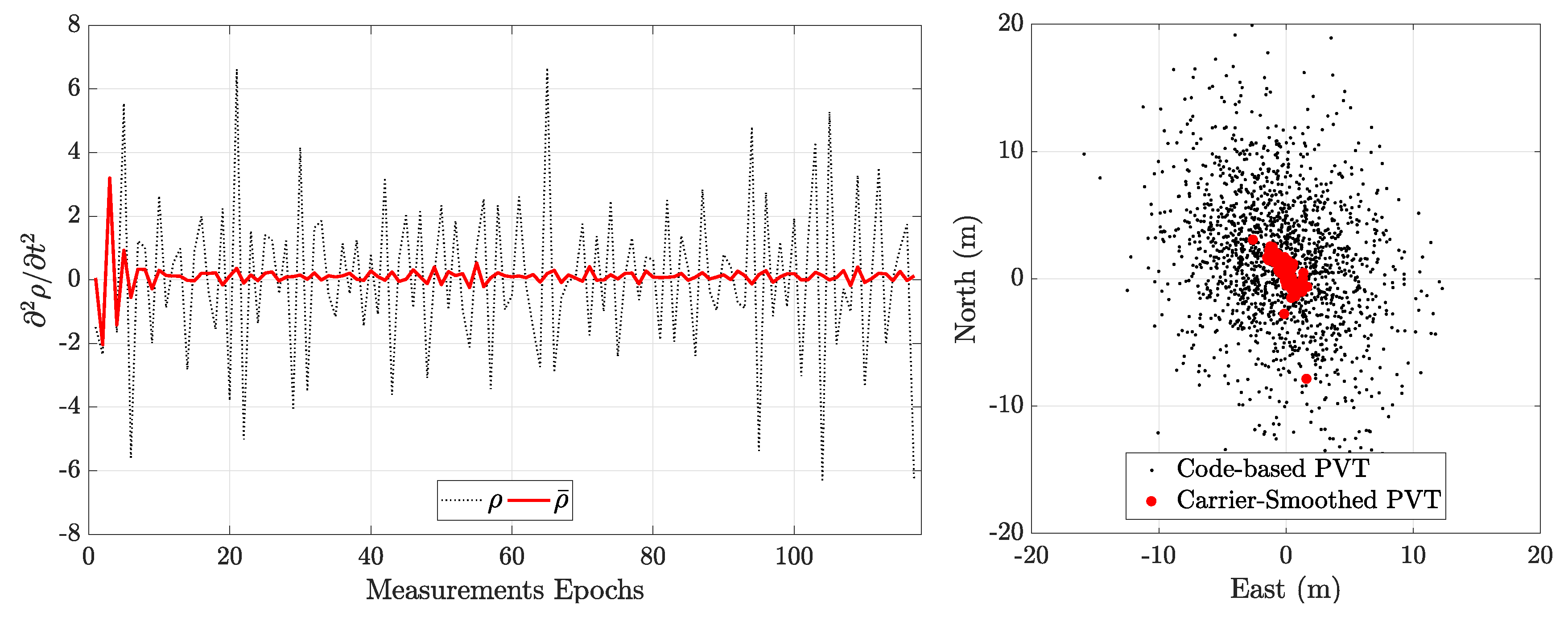
2.3. Basic PVT with Raw Measurements
- Xiaomi MI 8 (single-frequency mode) running Android 8, denoted as MI 8.
- Samsung Galaxy S8 (Exynos 8895) running Android 8, denoted as S8.
- Huawei P10 running Android 8, denoted as P10.
3. Methodology and Methods
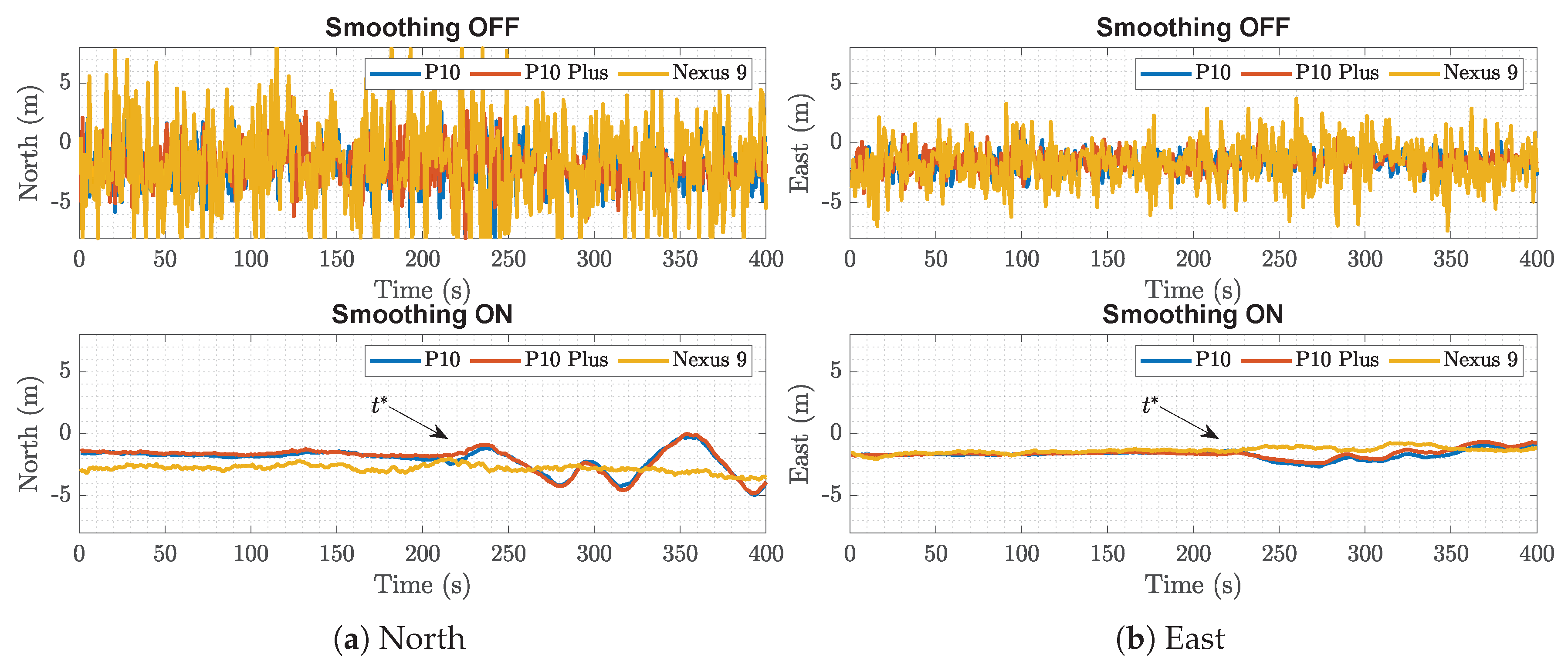
3.1. Smoothing of Code Pseudoranges
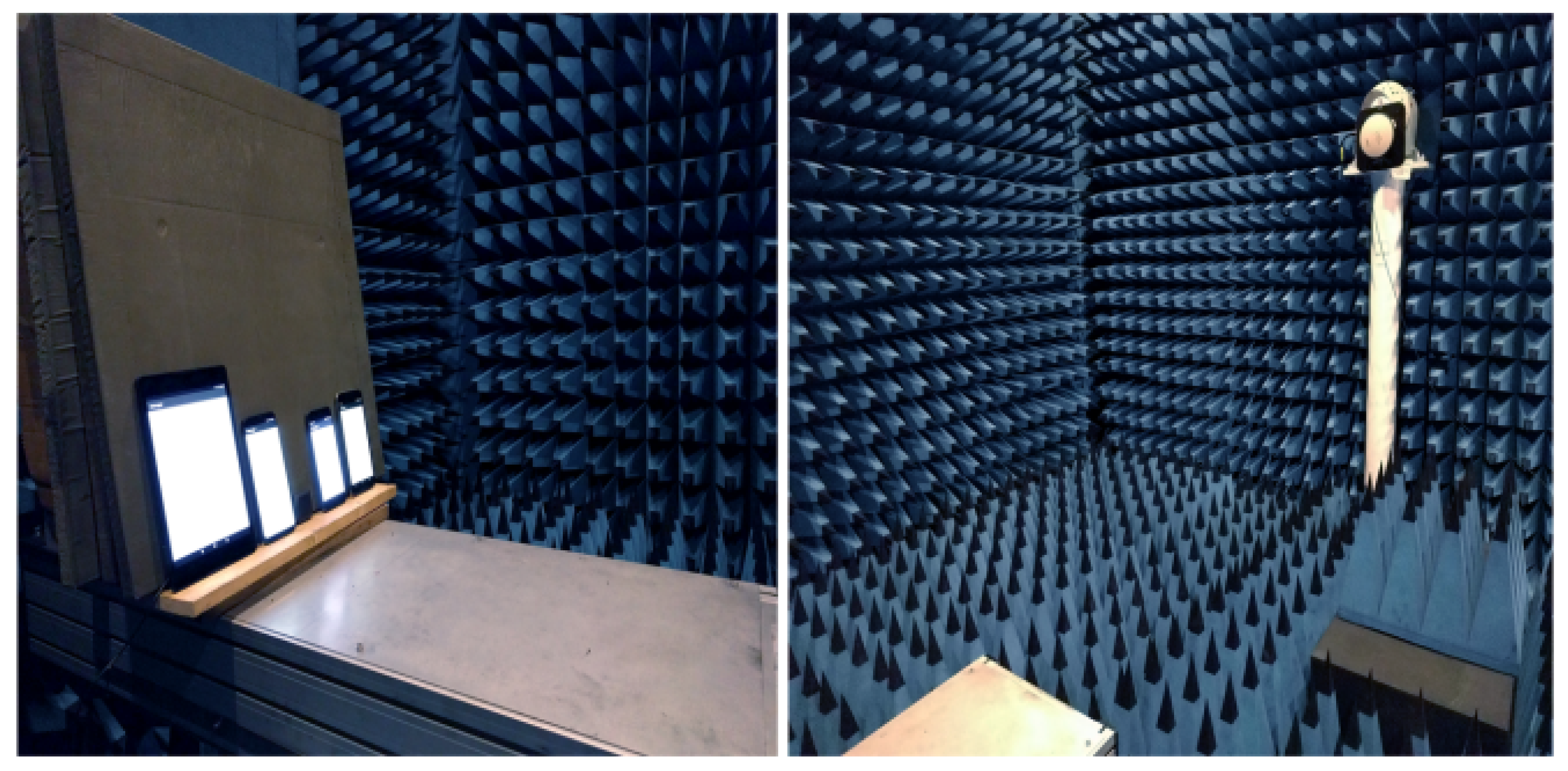
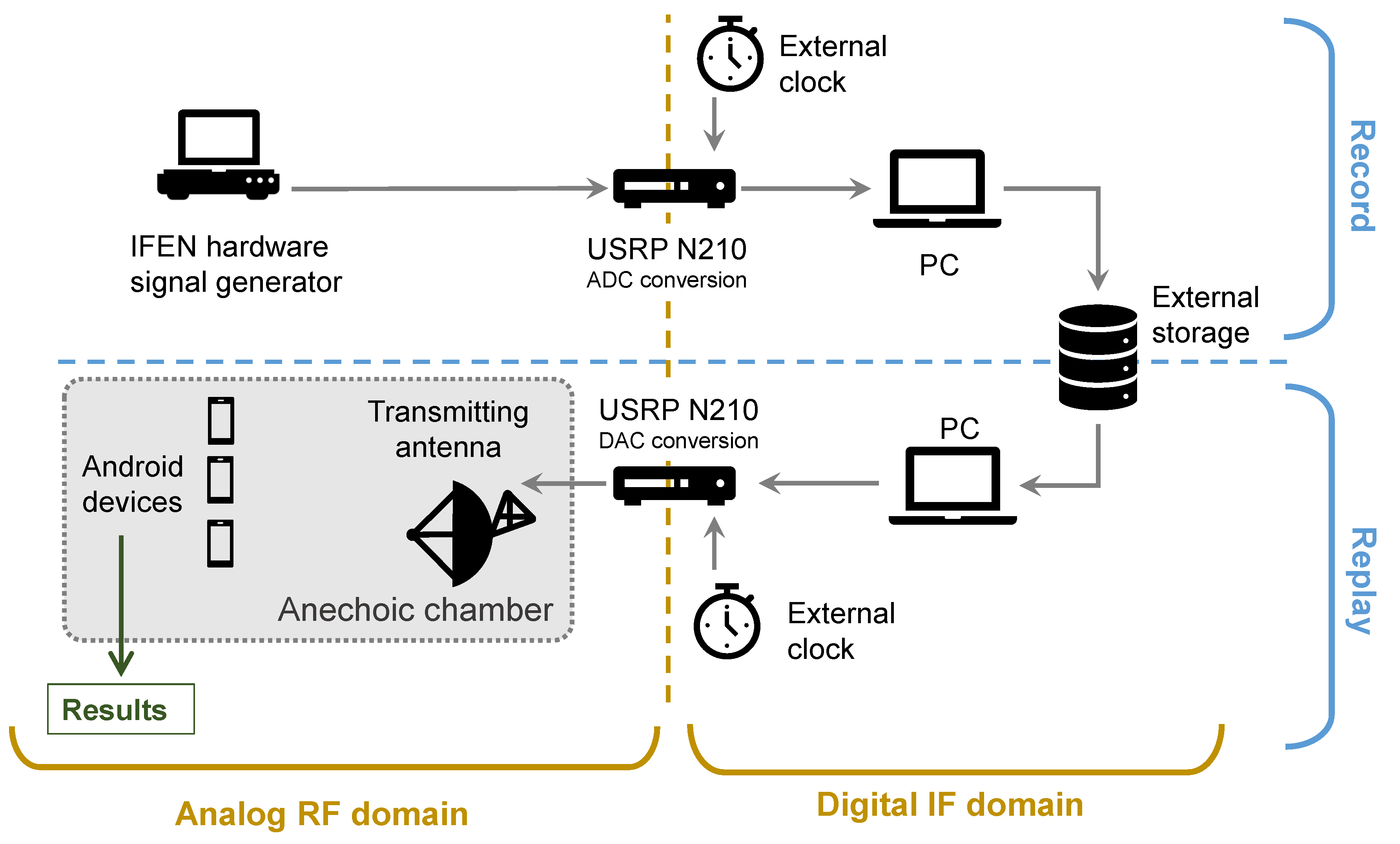
3.2. Controlled Environment Setup
4. Results and Discussion
- Huawei P10 smartphone,
- Huawei P10 Plus smartphone,
- HTC Nexus 9 tablet.
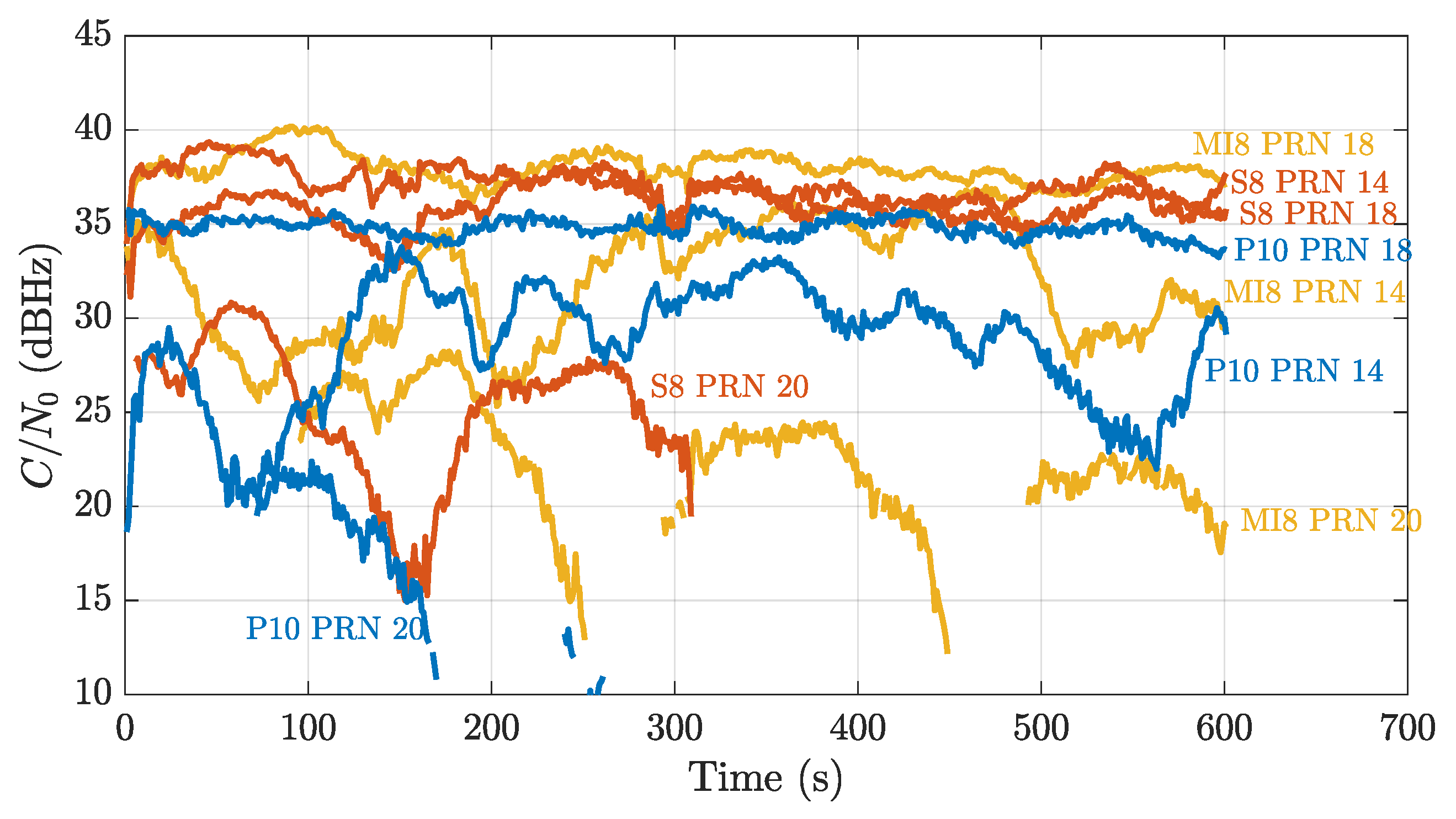
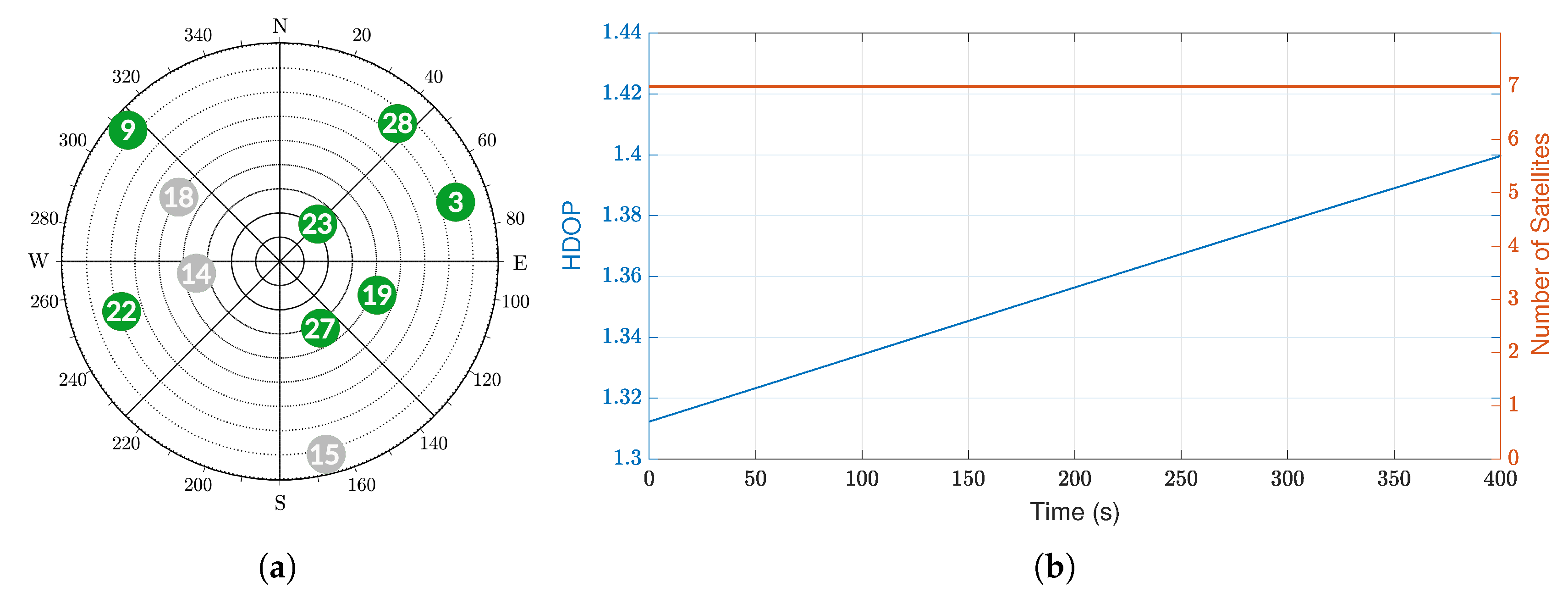
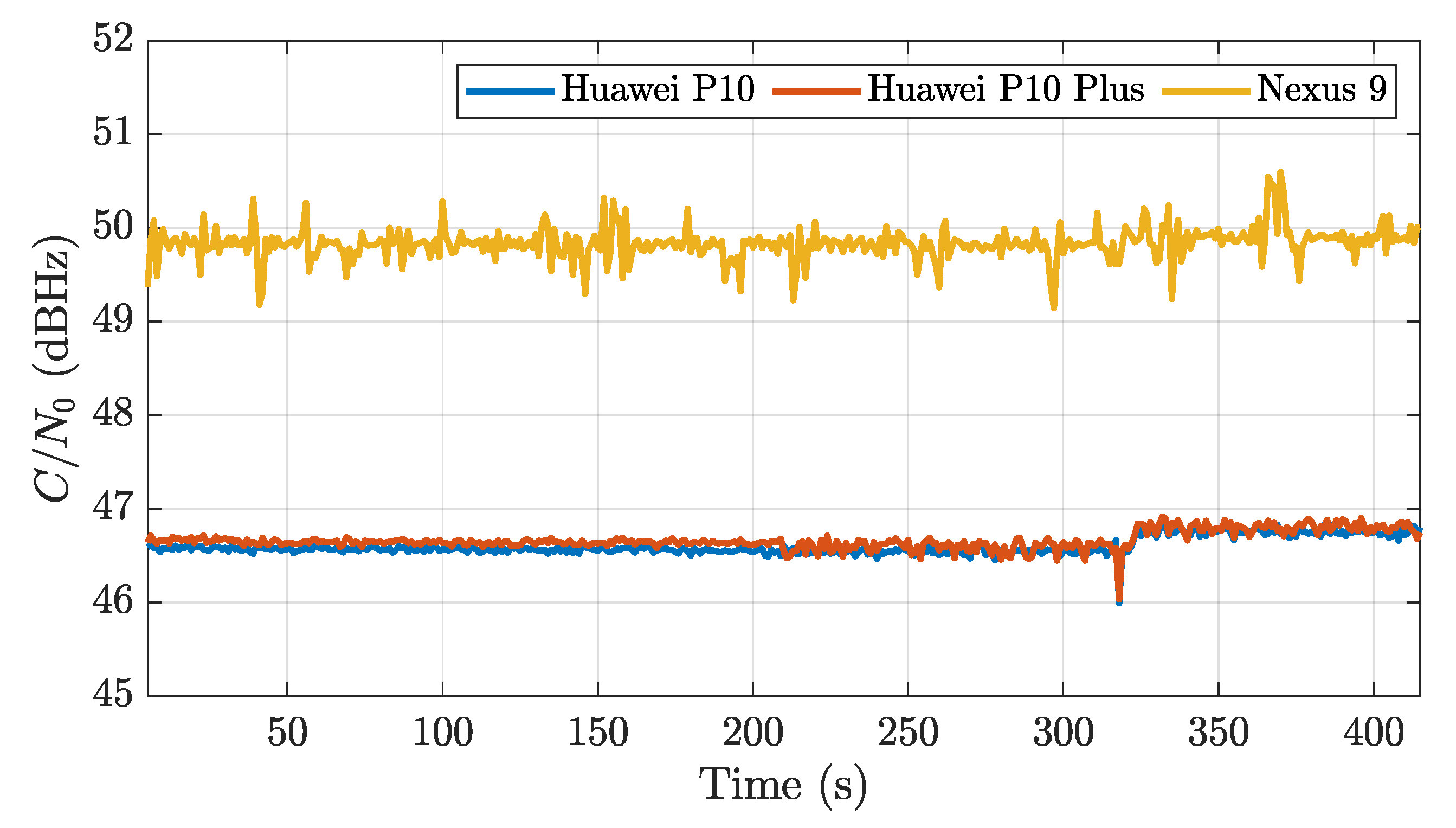
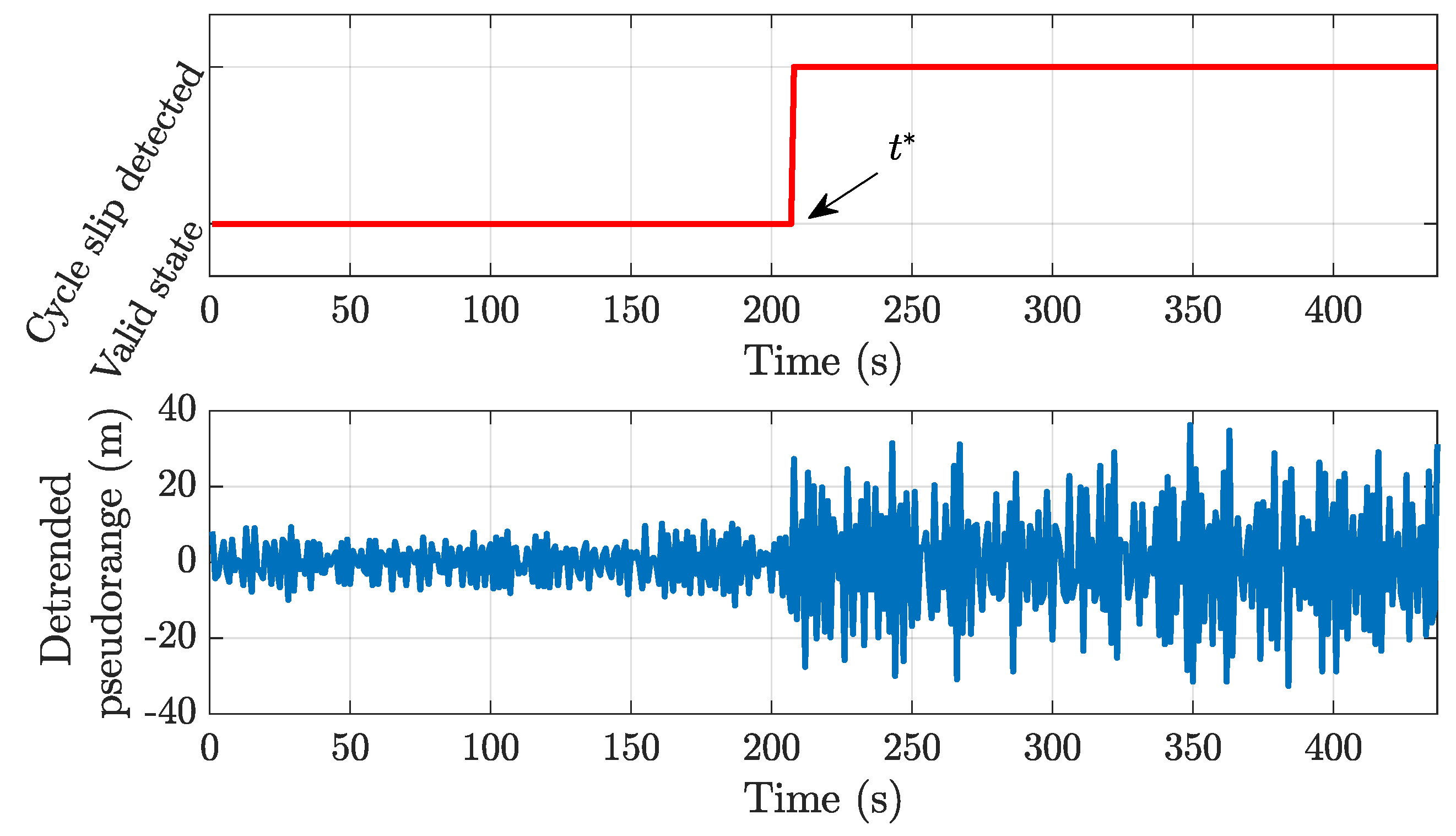
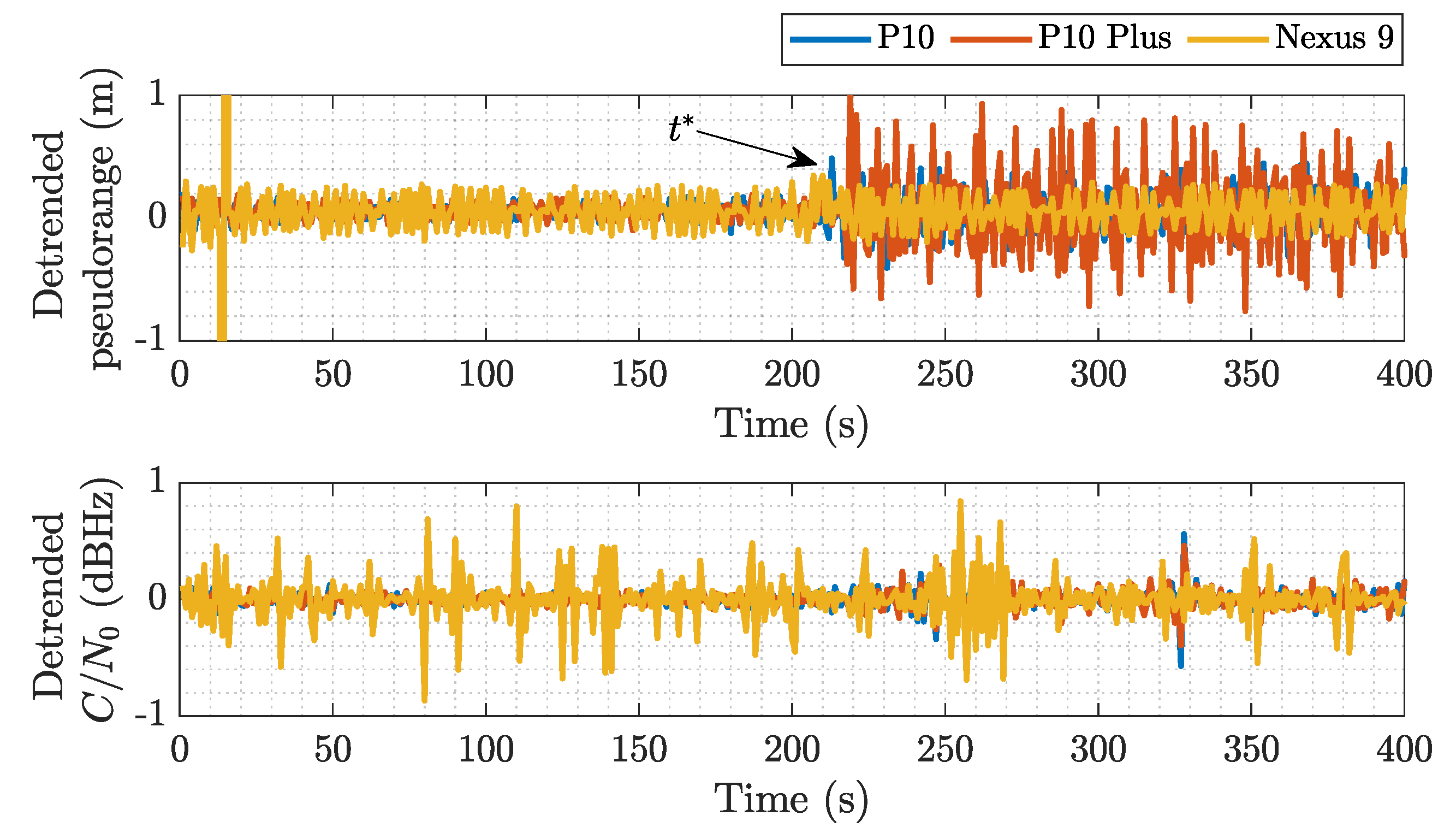
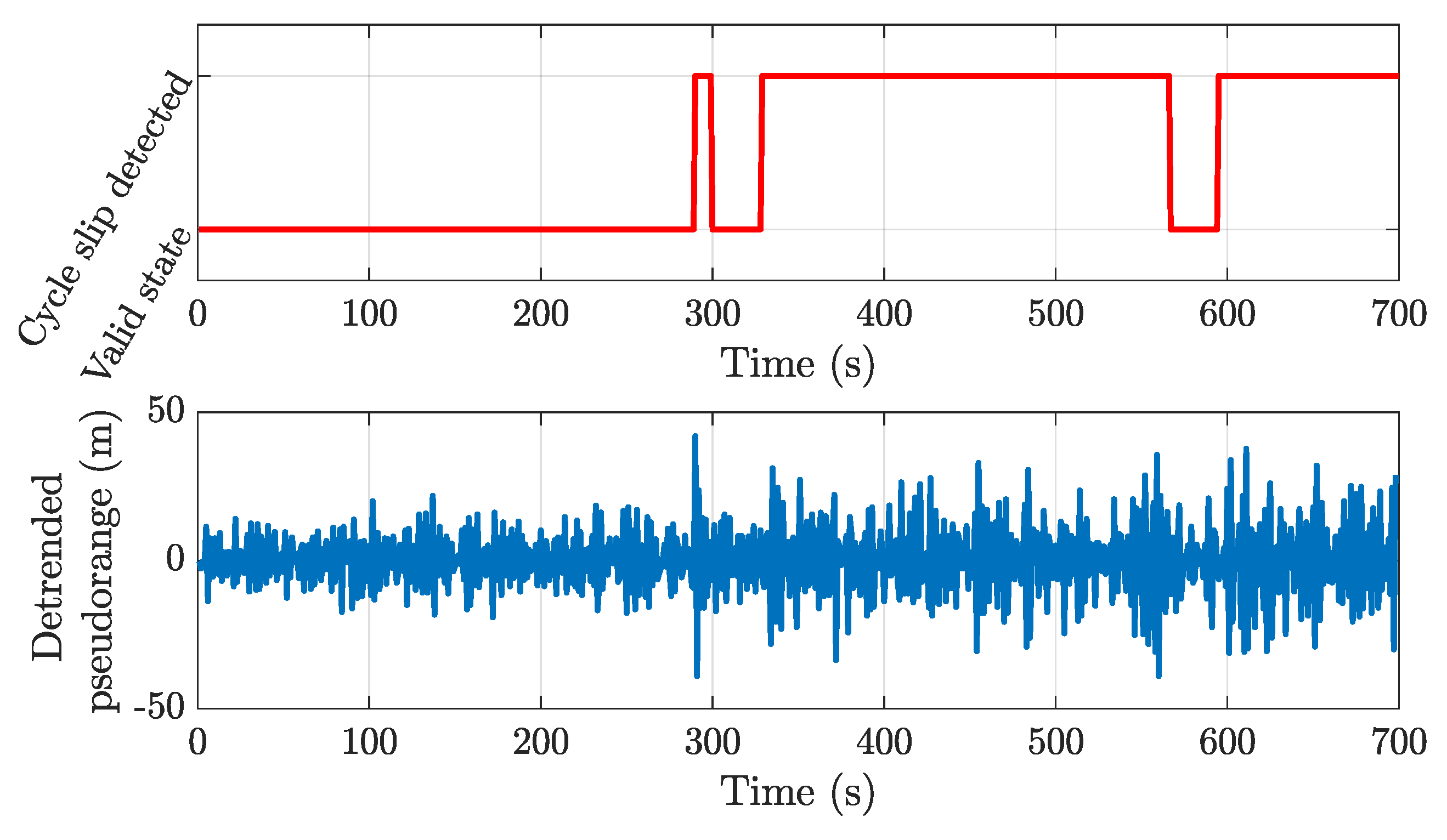
4.1. Analysis of Raw Measurements
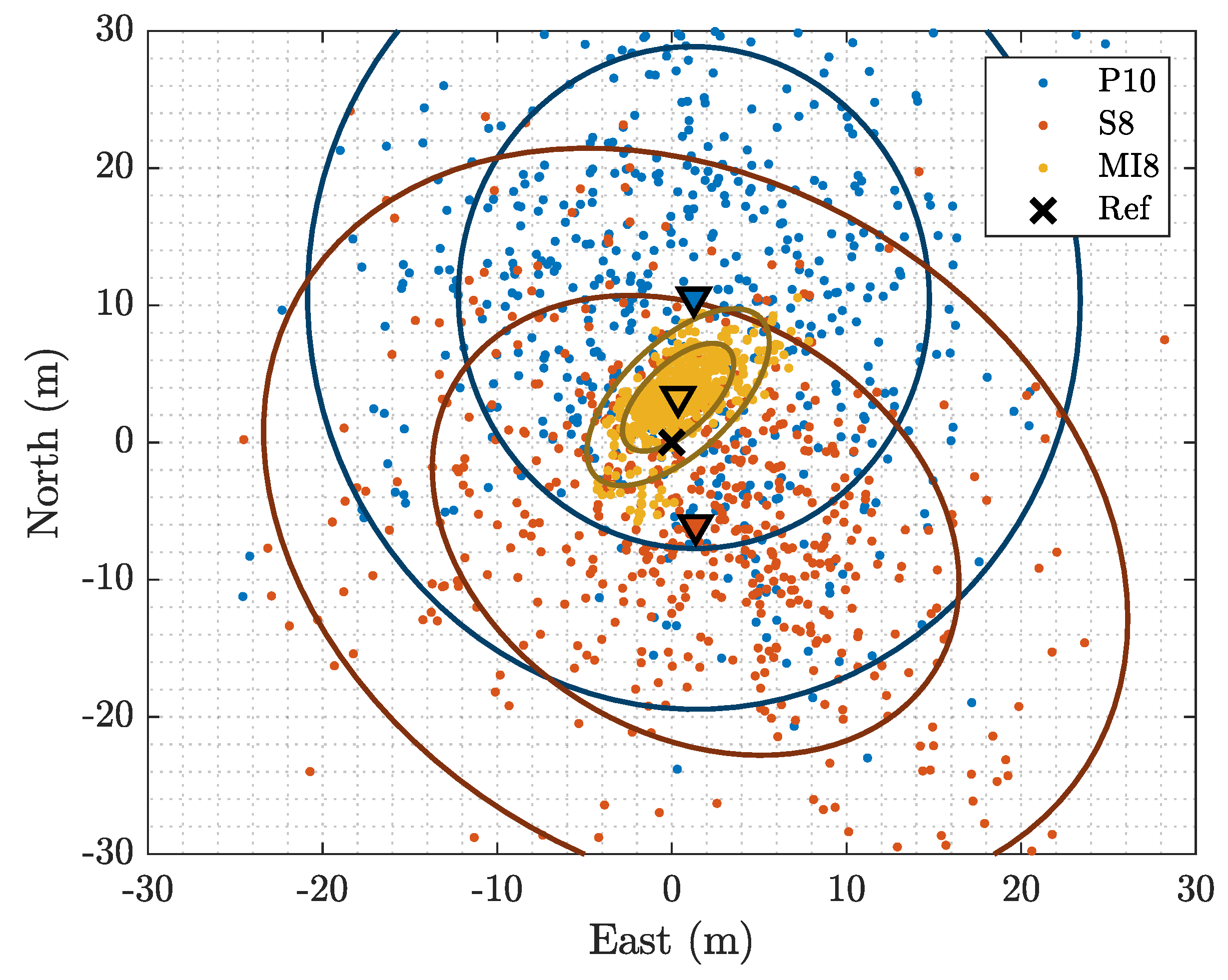
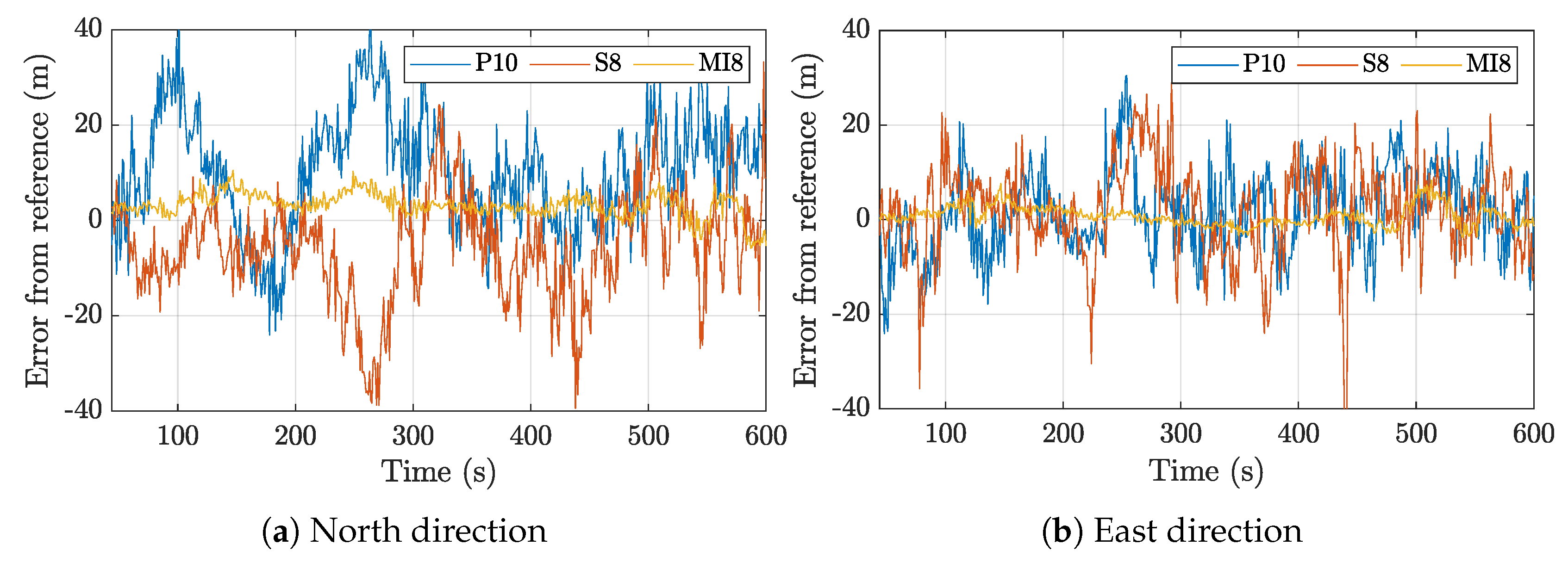
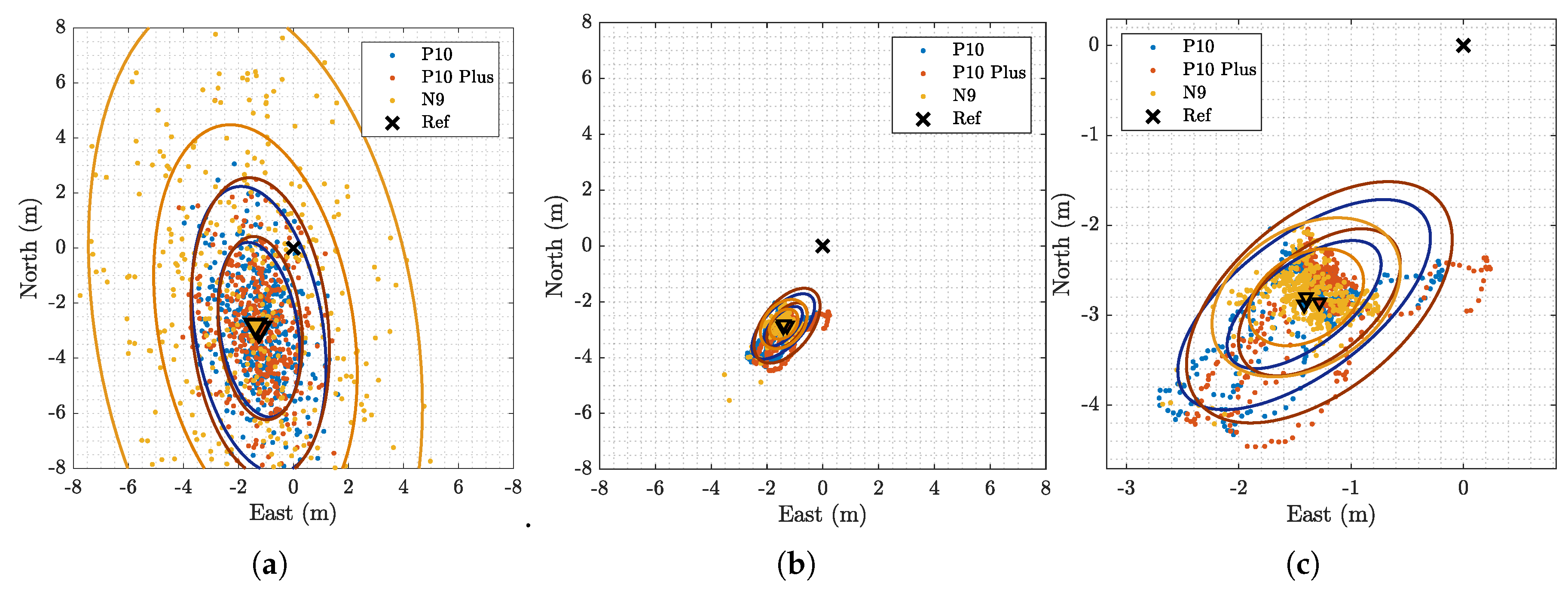
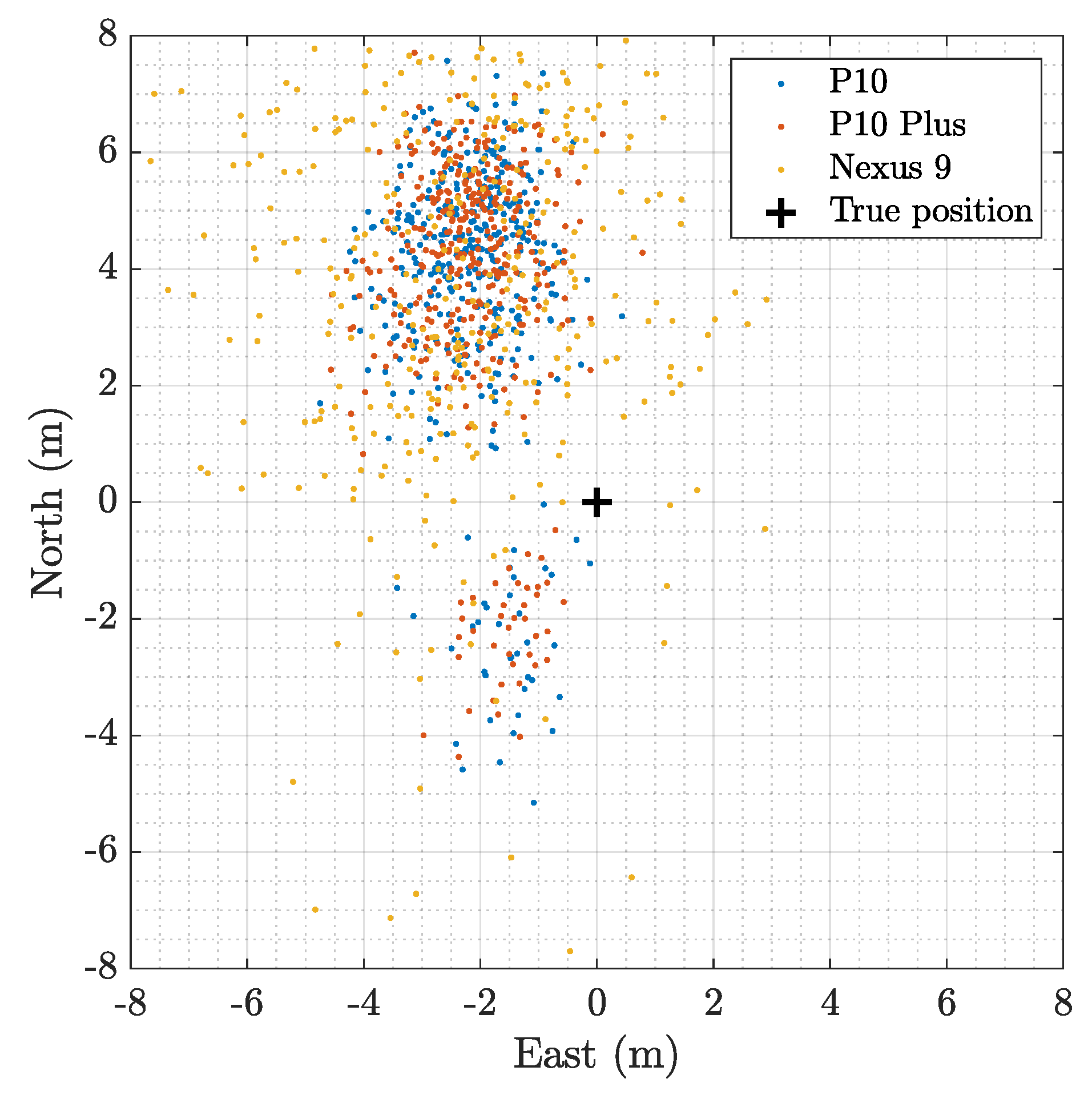
4.2. Positioning Solutions
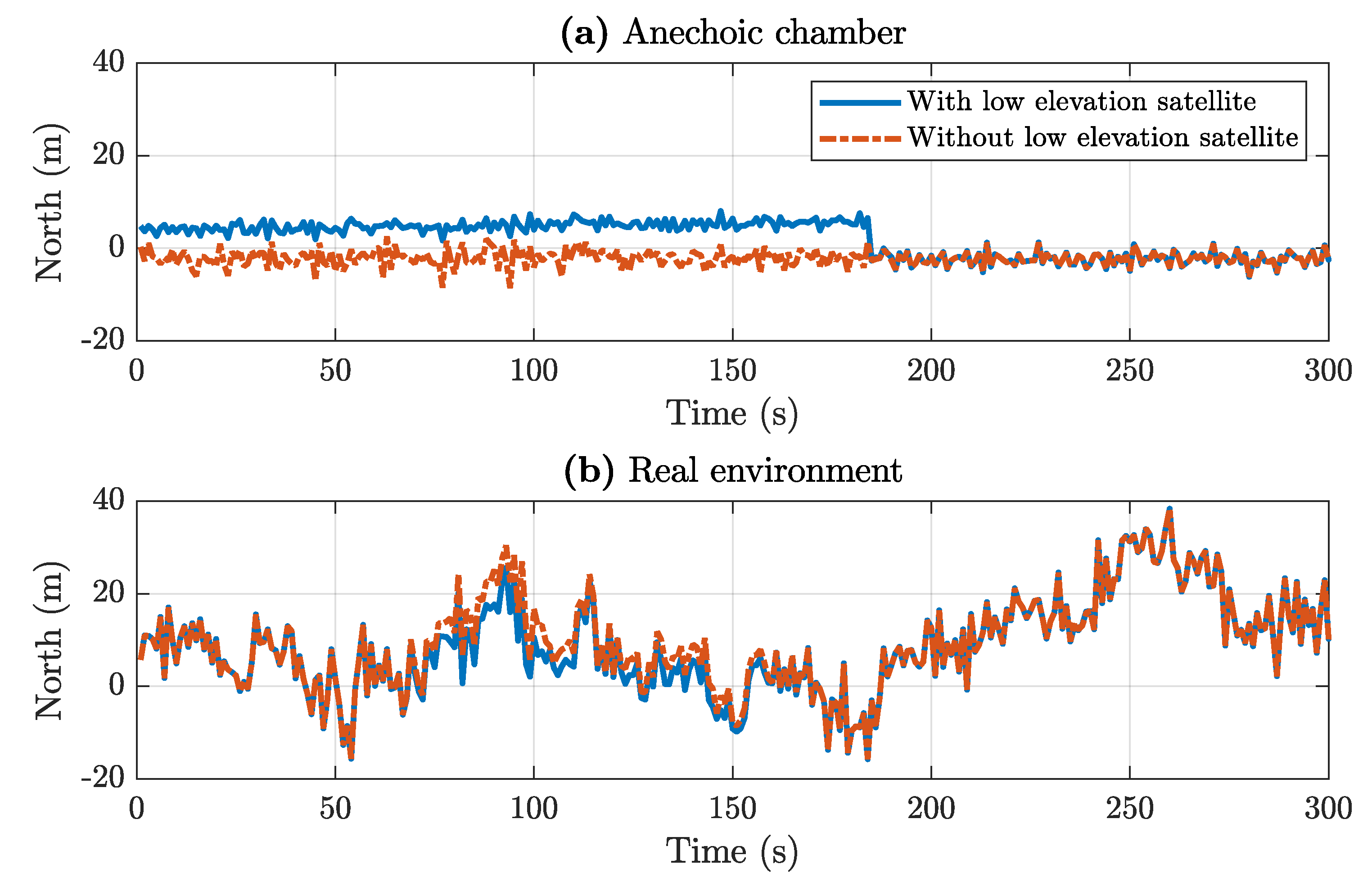
4.3. Duty-Cycle Effect on Anechoic and Real Environment
5. Conclusions and Scope for Future
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| API | Application Programming Interface |
| CEP | Circular Error Probable |
| Carrier to Noise Power Density Eatio | |
| DET | Department of Electronics and Telecommunications |
| ECEF | Earth-Centered Earth-Fixed |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| GSA | European GNSS Agency |
| HDOP | Horizontal Dilution Of Precision |
| IF | Intermediate Frequency |
| LBS | Location-Based Service |
| LNA | Low Noise Amplifier |
| OCXO | Oven Controlled Crystal Oscillator |
| PRN | Pseudo Random Noise |
| PVT | Position, Velocity, Time |
| RF | Radio Frequency |
| RMSE | Root Mean Square Error |
| STD | Standard Deviation |
| USRP | Universal Software Radio Peripheral |
| WLS | Weighted Least Squares |
References
- Küpper, A. Location-Based Services: Fundamentals and Operation; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Wang, B.; Liu, X.; Yu, B.; Jia, R.; Gan, X. Pedestrian Dead Reckoning Based on Motion Mode Recognition Using a Smartphone. Sensors 2018, 18, 1811. [Google Scholar] [CrossRef] [PubMed]
- Privat, A.; Pascaud, M.; Laurichesse, D. Innovative smartphone applications for Precise Point Positioning. In Proceedings of the 2018 SpaceOps Conference, Marseille, France, 28 May–1 June 2018; p. 2324. [Google Scholar]
- Realini, E.; Caldera, S.; Pertusini, L.; Sampietro, D. Precise gnss positioning using smart devices. Sensors 2017, 17, 2434. [Google Scholar] [CrossRef] [PubMed]
- GSA Working Group. Using GNSS Raw Measurements on Android Devices. Available online: https://www.gsa.europa.eu/system/files/reports/gnss_raw_measurement_web_0.pdf (accessed on 8 November 2018).
- Riley, S.; Landau, H.; Gomez, V.; Mishukova, N.; Lentz, W.; Clare, A. Positioning with Android GNSS observables. GPS World 2018, 29, 18–34. [Google Scholar]
- Linty, N.; Lo Presti, L.; Dovis, F.; Crosta, P. Performance analysis of duty-cycle power saving techniques in GNSS mass-market receivers. In Proceedings of the Position, Location and Navigation Symposium-PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1096–1104. [Google Scholar]
- Humphreys, T.E.; Murrian, M.; Pesyna, K.M., Jr.; Podshivalov, S.; van Diggelen, F. On the feasibility of cm-accurate positioning via a smartphone’s antenna and GNSS chip. In Proceedings of the Radionavigation Laboratory Conference Proceedings, Savannah, GA, USA, 11–14 April 2016. [Google Scholar]
- Dabove, P.; Di Pietra, V.; Lingua, A.M. Positioning Techniques with Smartphone Technology: Performances and Methodologies in Outdoor and Indoor Scenarios. In Smartphones from an Applied Research Perspective; InTech: London, UK, 2017. [Google Scholar]
- Cristodaro, C.; Ruotsalainen, L.; Dovis, F. Benefits and Limitations of the Record and Replay Approach for GNSS Receiver Performance Assessment in Harsh Scenarios. Sensors 2018, 18, 2189. [Google Scholar] [CrossRef] [PubMed]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2006. [Google Scholar]
- Kaplan, E.D.; Hegarty, C. Understanding GPS/GNSS: Principles and Applications; Artech House: Norwood, MA, USA, 2017. [Google Scholar]
- Zekavat, R.; Buehrer, R.M. Handbook of Position Location: Theory, Practice and Advances; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 27. [Google Scholar]
- Raw GNSS Measurements|Android Developers. Available online: http://g.co/gnsstools (accessed on 8 November 2018).
- Borio, D.; Li, H.; Closas, P. Huber’s Non-Linearity for GNSS Interference Mitigation. Sensors 2018, 18, 2217. [Google Scholar] [CrossRef] [PubMed]
- Van Diggelen, F.; Khider, M. GNSS Analysis Tools from Google. Inside GNSS 2018, 13, 51. [Google Scholar]
- Petovello, M.; Lo Presti, L.; Visintin, M. Can you list all the properties of the carrier-smoothing filter? Inside GNSS 2015, 10, 32–37. [Google Scholar]
- Linty, N.; Minetto, A.; Dovis, F.; Spogli, L. Effects of Phase Scintillation on the GNSS Positioning Error During the September 2017 Storm at Svalbard. Space Weather 2018, 16, 1317–1329. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | CEP (m) | Horizontal RMSE (m) | North (m) | East (m) | Height (m) |
|---|---|---|---|---|---|
| Huawei P10 | |||||
| Samsung S8 | |||||
| Xiaomi MI 8 |
| Smoothing OFF | Smoothing ON | |||||
|---|---|---|---|---|---|---|
| Device | North (m) | East (m) | Height (m) | North (m) | East (m) | Height (m) |
| Huawei P10 | ||||||
| Huawei P10 Plus | ||||||
| Nexus 9 | ||||||
| Before | After | |||||
|---|---|---|---|---|---|---|
| Device | North (m) | East (m) | Height (m) | North (m) | East (m) | Height (m) |
| Huawei P10 | ||||||
| Huawei P10 Plus | ||||||
| Nexus 9 | ||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gogoi, N.; Minetto, A.; Linty, N.; Dovis, F. A Controlled-Environment Quality Assessment of Android GNSS Raw Measurements. Electronics 2019, 8, 5. https://doi.org/10.3390/electronics8010005
Gogoi N, Minetto A, Linty N, Dovis F. A Controlled-Environment Quality Assessment of Android GNSS Raw Measurements. Electronics. 2019; 8(1):5. https://doi.org/10.3390/electronics8010005
Chicago/Turabian StyleGogoi, Neil, Alex Minetto, Nicola Linty, and Fabio Dovis. 2019. "A Controlled-Environment Quality Assessment of Android GNSS Raw Measurements" Electronics 8, no. 1: 5. https://doi.org/10.3390/electronics8010005
APA StyleGogoi, N., Minetto, A., Linty, N., & Dovis, F. (2019). A Controlled-Environment Quality Assessment of Android GNSS Raw Measurements. Electronics, 8(1), 5. https://doi.org/10.3390/electronics8010005