False Sequential Command Attack of Large-Scale Cyber-Physical Systems


Abstract
:1. Introduction
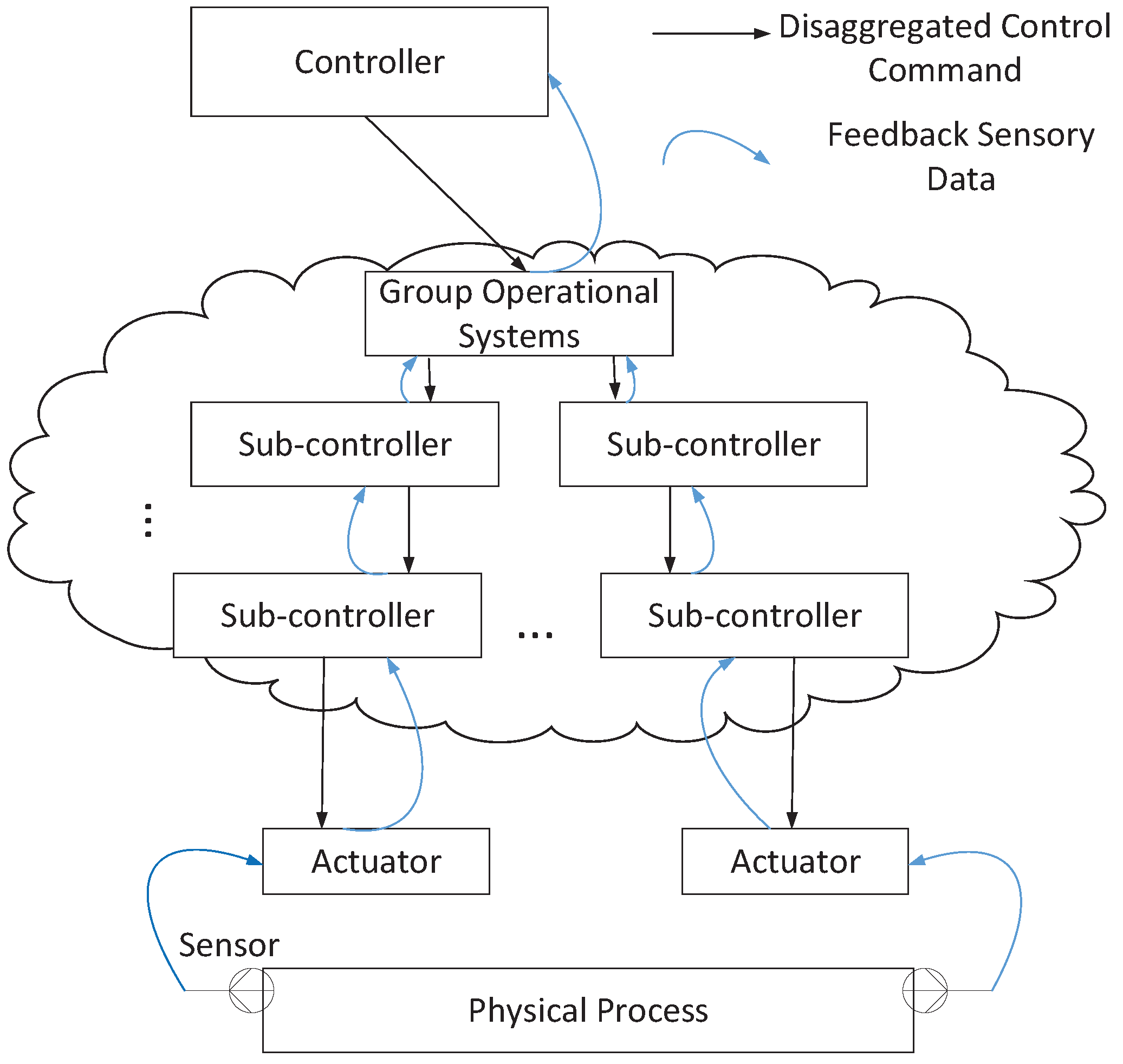
- We develop a simple and effective system model with intelligent control, which can describe the response from physical system handling command sequences issued by the controller.
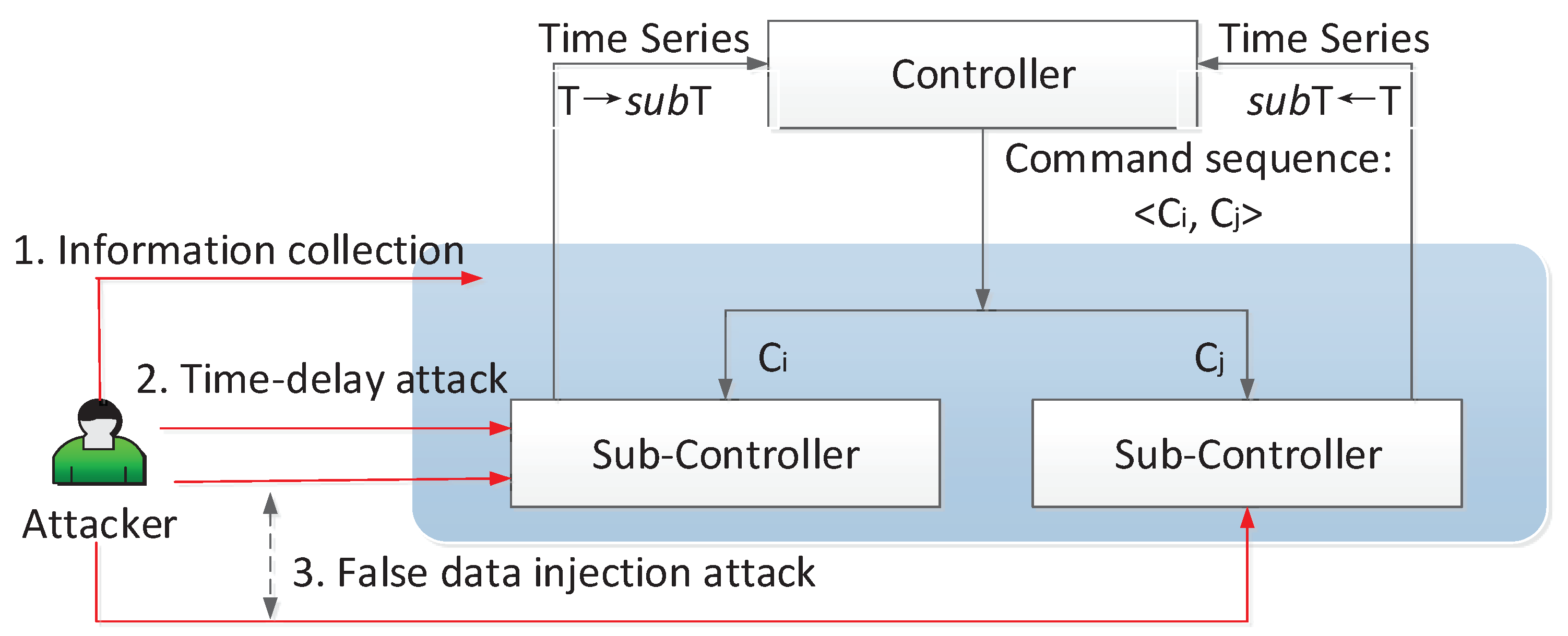
- We describe a feasible false sequential command attack model, which is undetected and tempts the intelligent controller to issue successive commands leading to the false control.
- Combining with the system model, we discuss other possible attack paths that can generate false sequential commands and analyze whether these attack paths can be undetected by methods based on event correlation and based on false data evaluation [17]. The work demonstrates that the proposed model is more feasible.
2. Related Work
3. Preliminaries
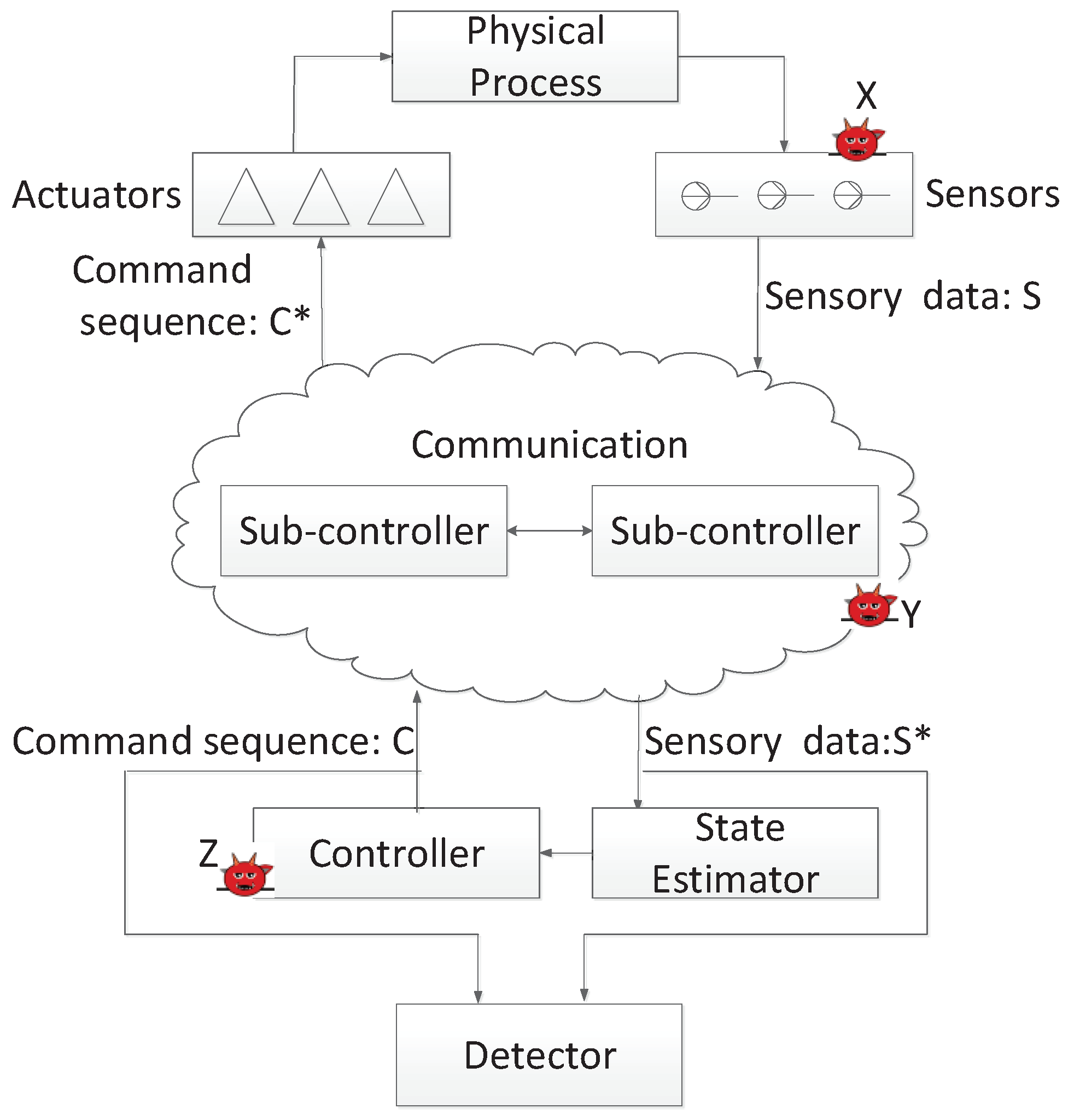
3.1. Data Transmission in the Communication System
3.2. Attack Methods and Detection Methods
3.2.1. Attack Methods
3.2.2. Detection Methods
4. System Model and Attack Model
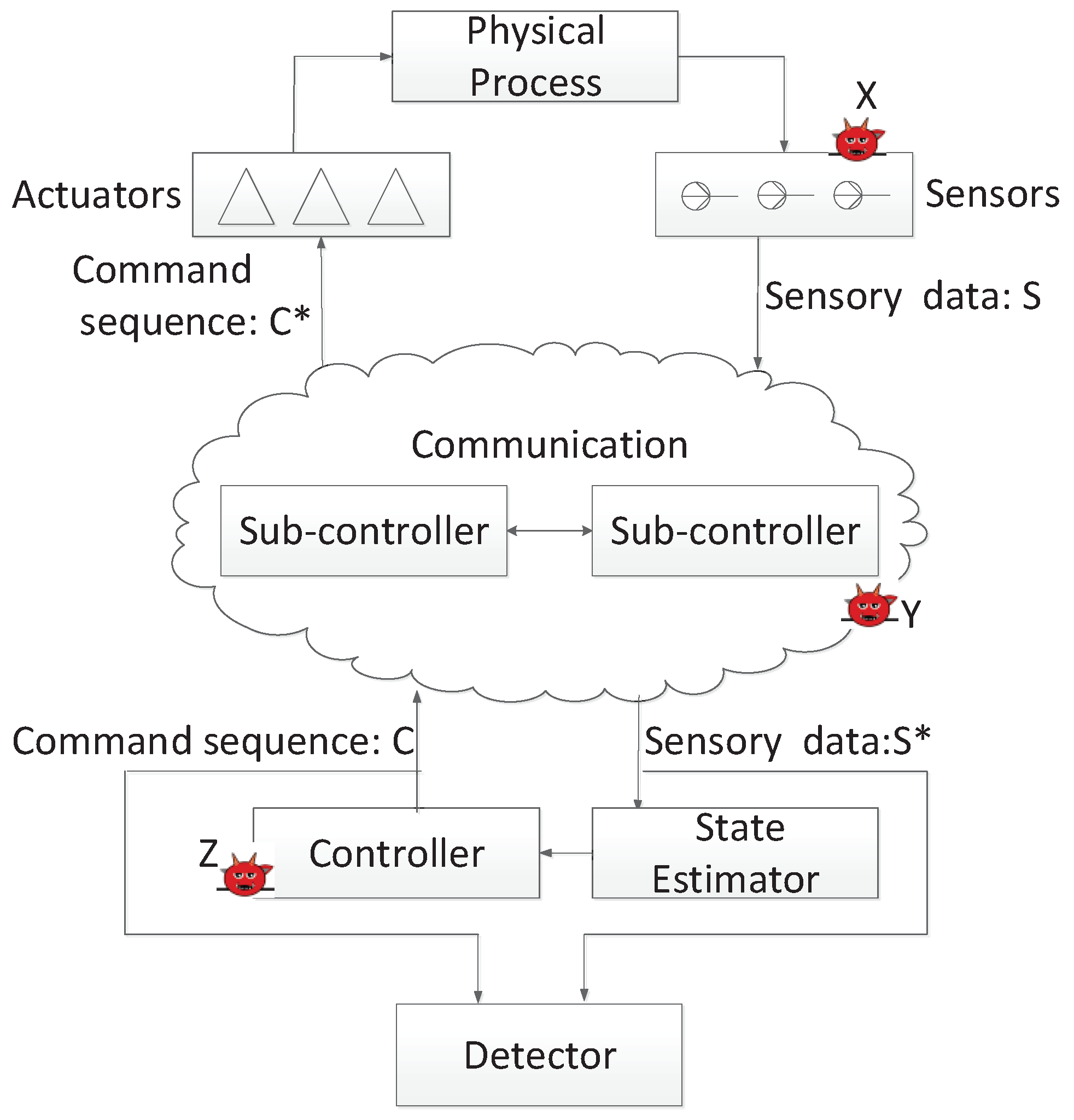
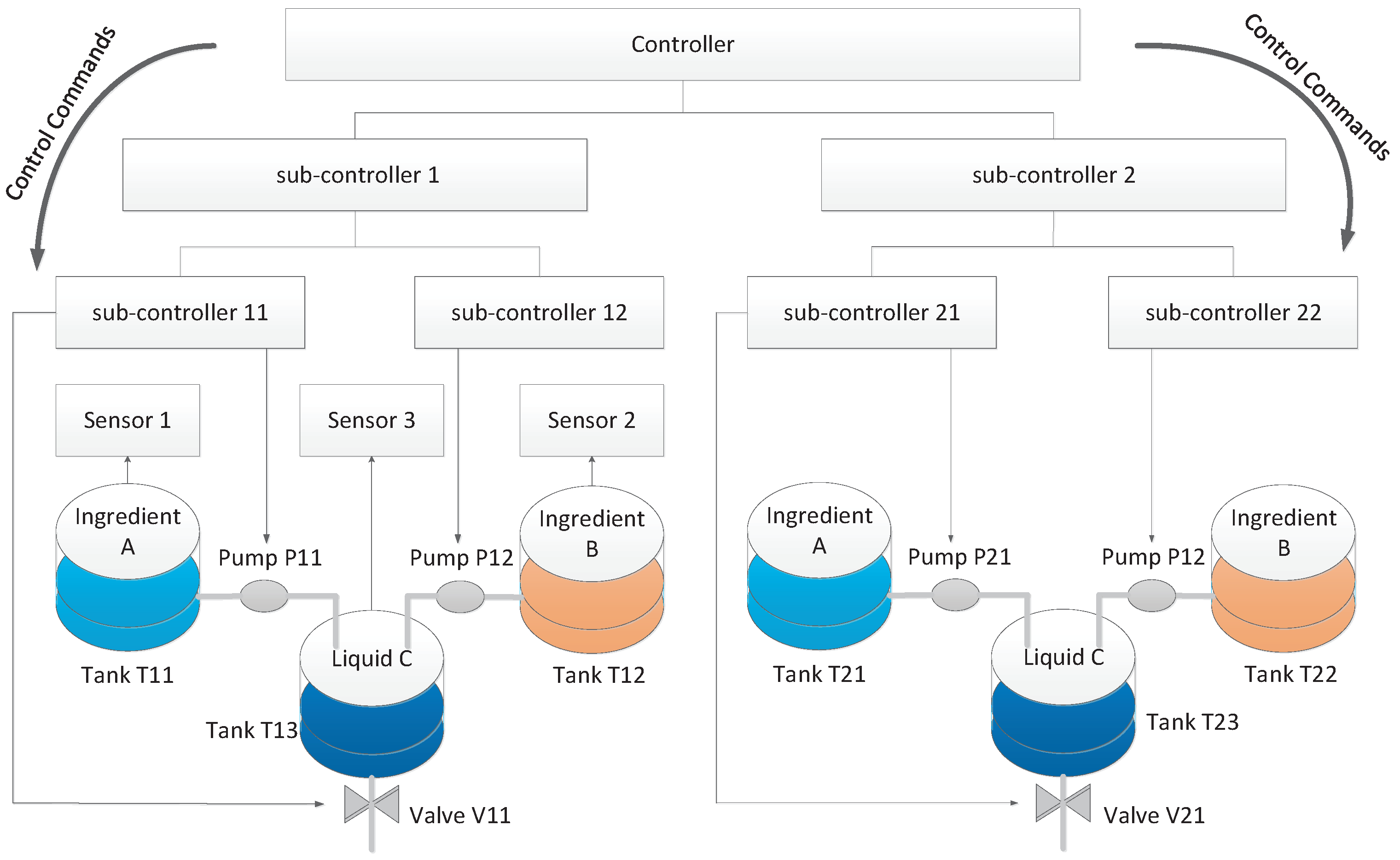
4.1. System Model
- is a finite set of aggregated commands from the controller. is the kind of aggregated command. m denotes the number of commands.
- is a finite set of commands that are executed by actuators. is disaggregated commands from the aggregated command . is the command that is executed by the actuator. p denotes the number of actuators.
- is a finite set of time series. A time series is the measured values of one sensor with the change of time. means the time series from the sensor. denotes the measurement of the sensor at time instant l.
- is a finite set of time series, which is used to evaluate the critical state of the physical system. is a subset of T. is the number of the time series.
- is a finite set of states, where means one kind of system state, and is evaluated based on . The relationship can be described aswhere is the constant matrix and denotes the system state at time instant k. = where denotes the value of time series at time instant k. Equation (2) describes the critical state evaluation.
- is a finite set of relationship between the current state and commands from the controller, where, denotes the number of the relationships. denotes that when the state is , the command from the controller is . The state at time instant is decided by and , which can be described aswhere and are constant matrices and denotes the command from controller at time k.
- is a set of states, which is a subset of S. When the current state is an element in set , a system fault occurs. In many systems, can be decided by the domain experts.
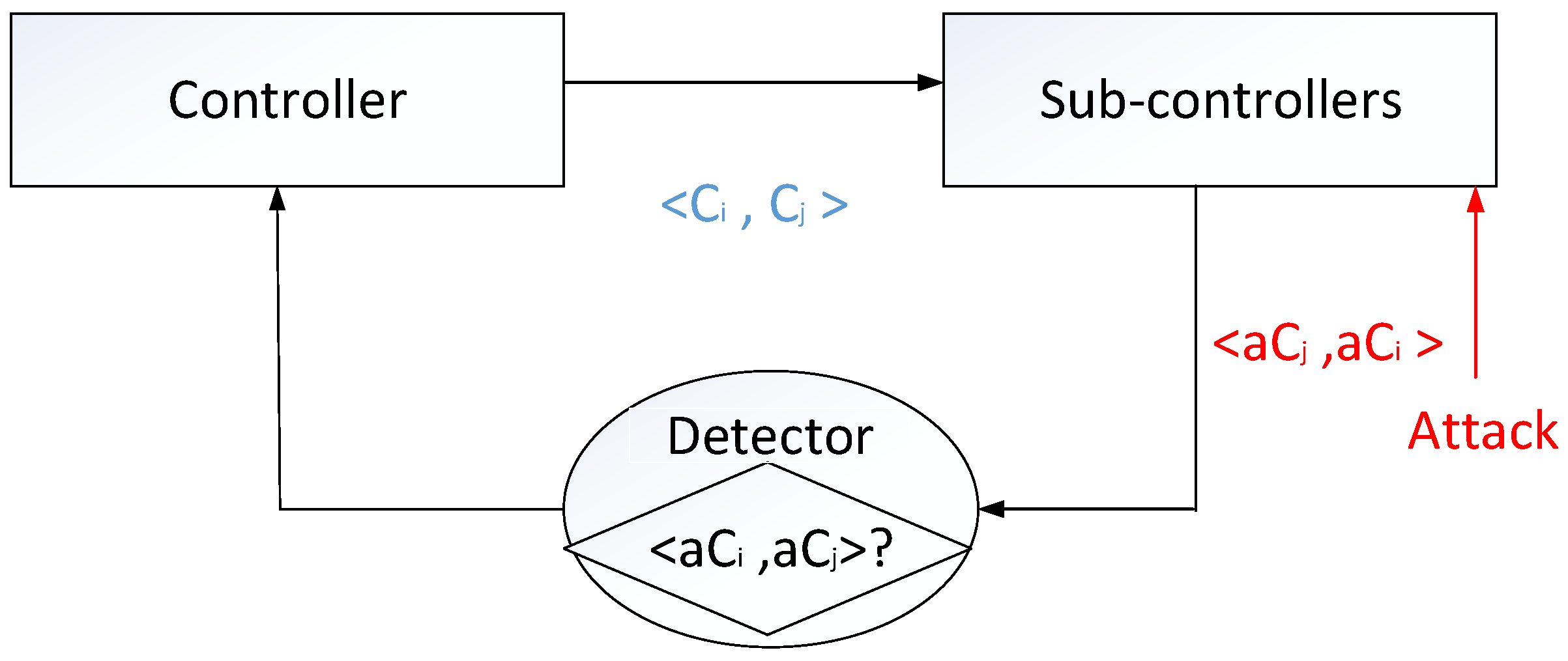
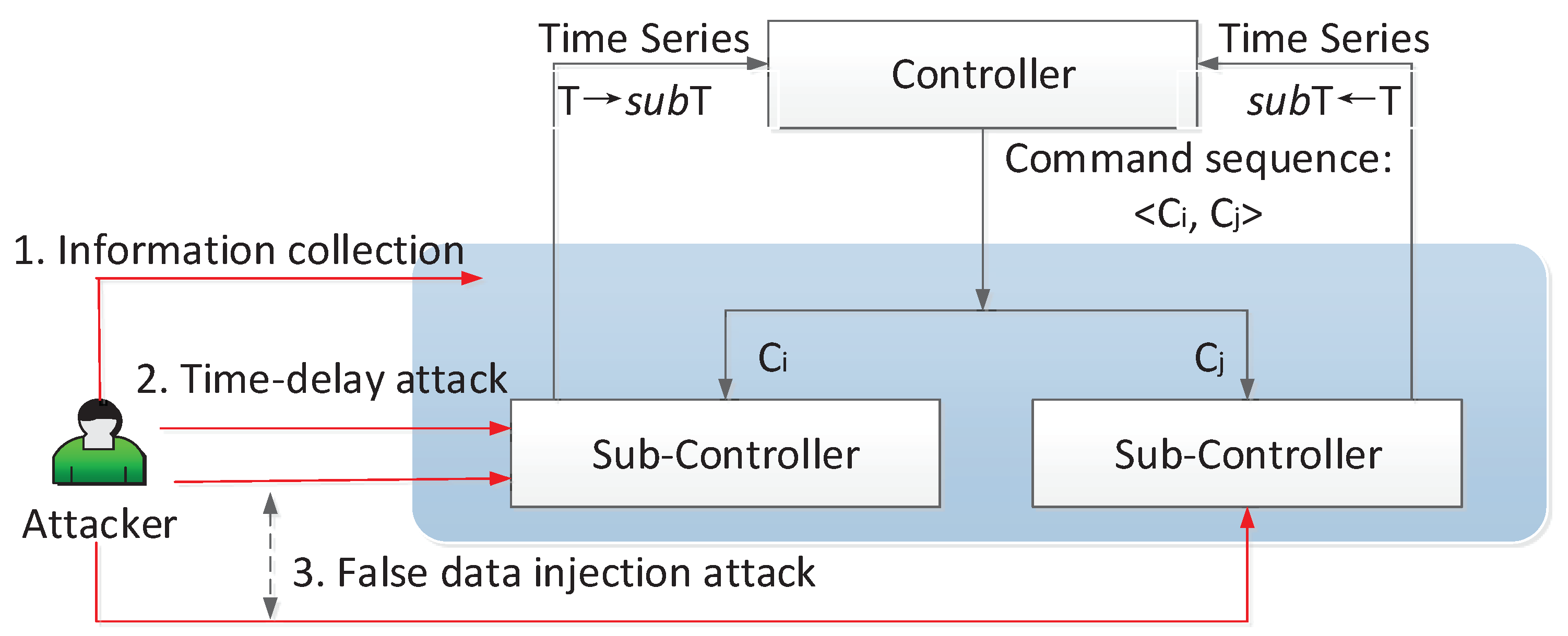
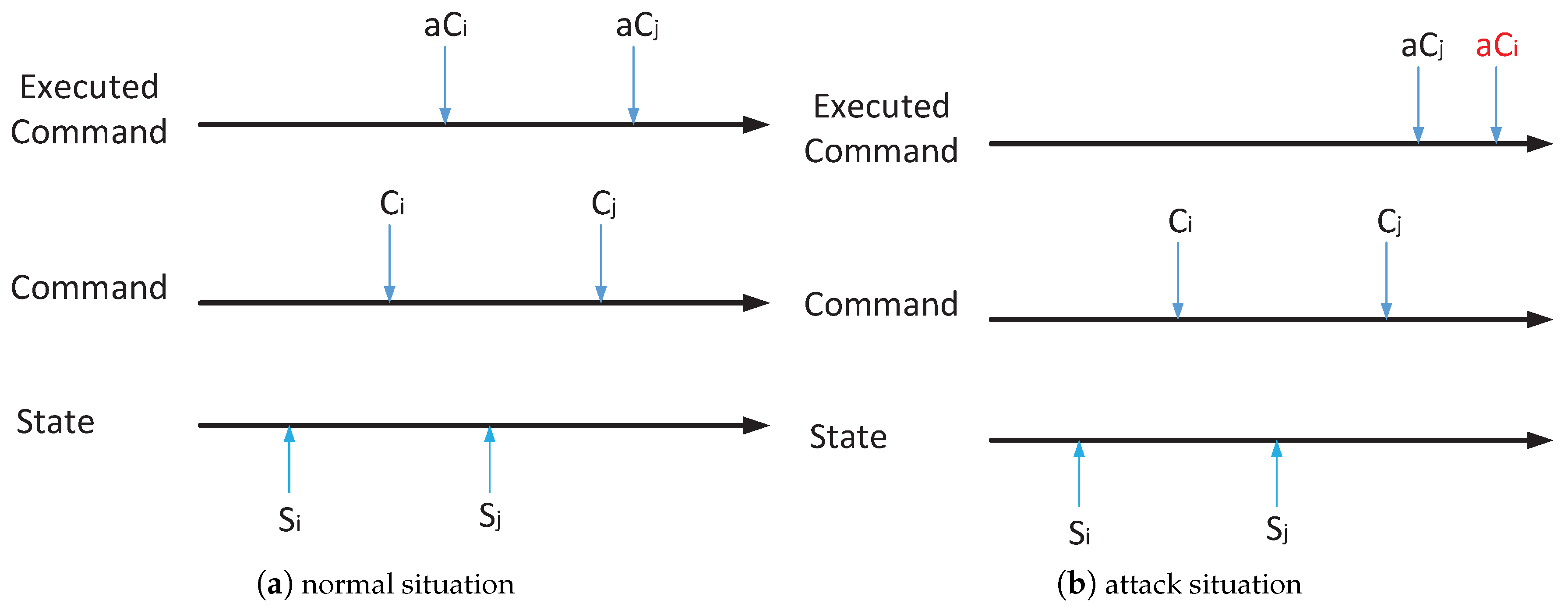
4.2. Attack Model
5. Analysis of other Paths
5.1. Attack Based on a Single Entry Point
5.2. Attack Based on Multiple Entry Points
6. Case Study
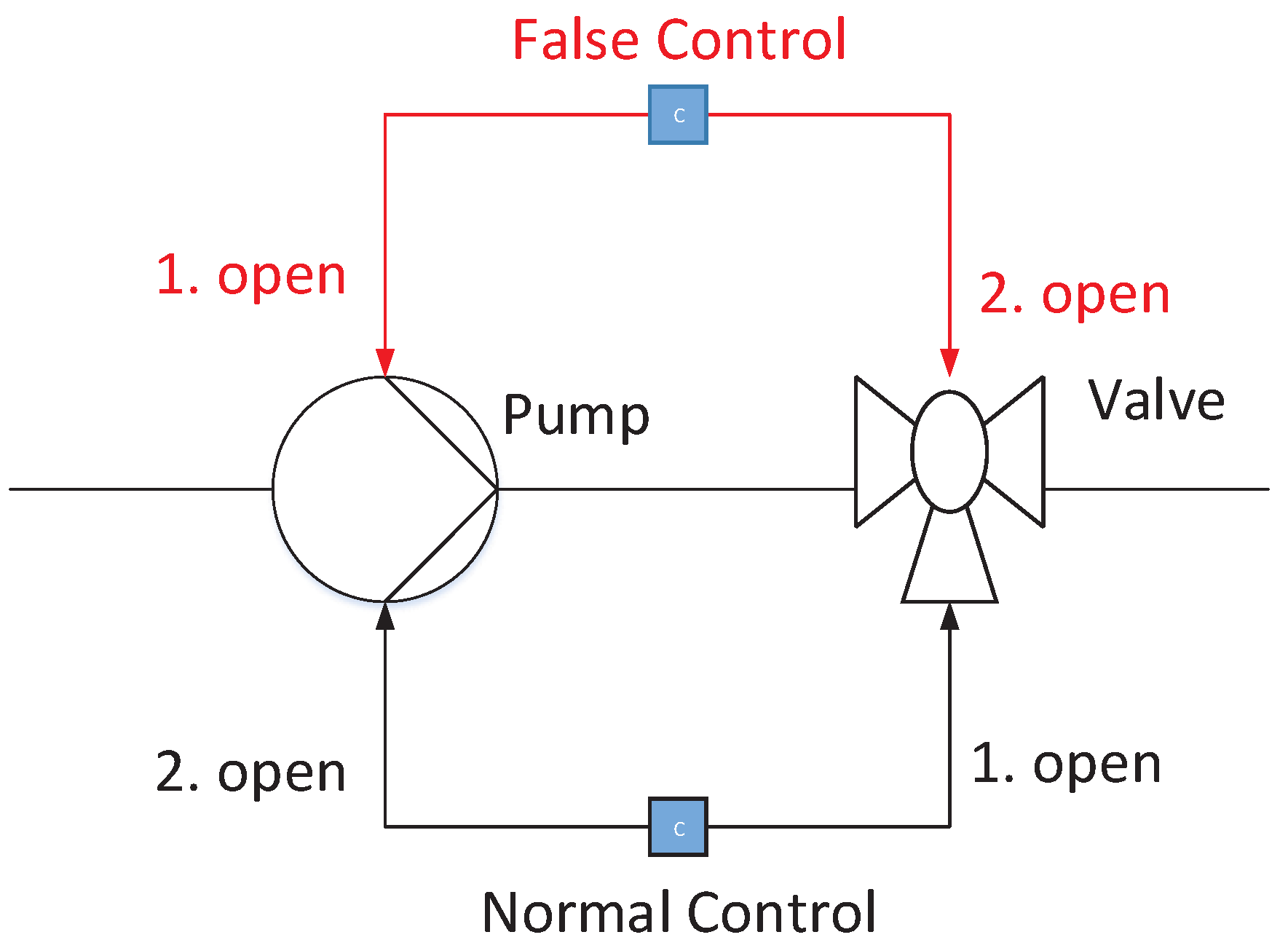
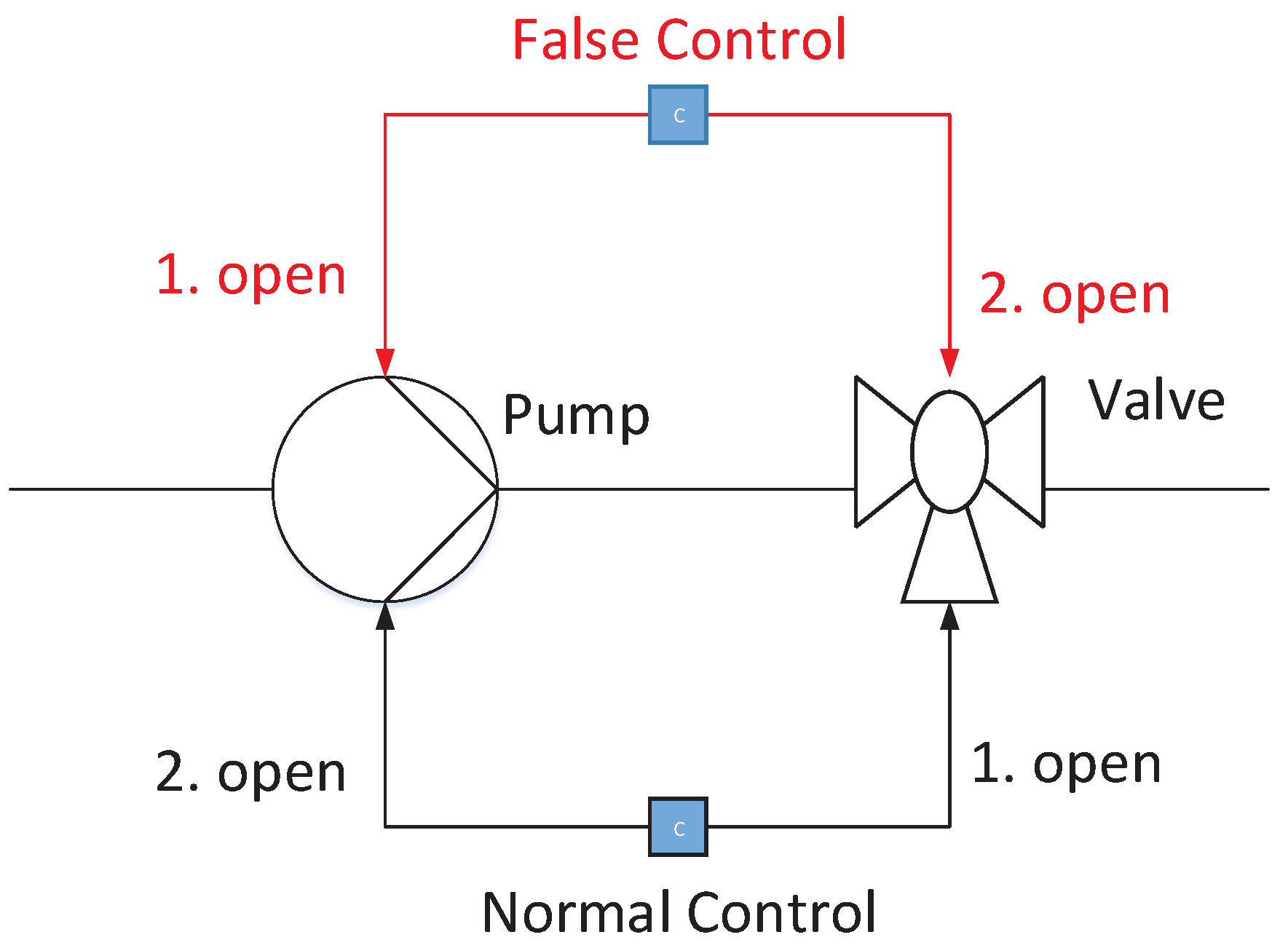
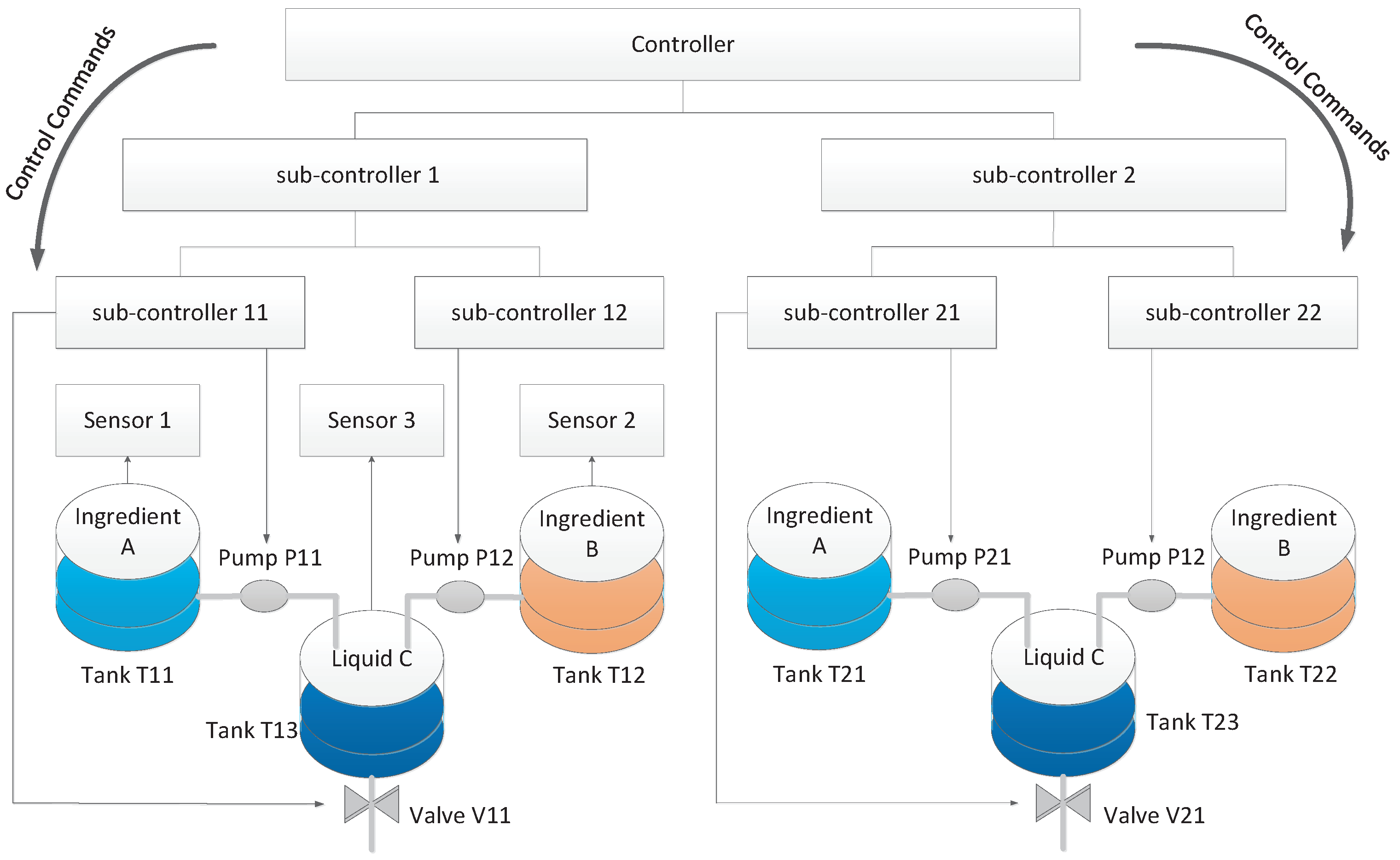
6.1. Scenario
6.2. Attack Cases
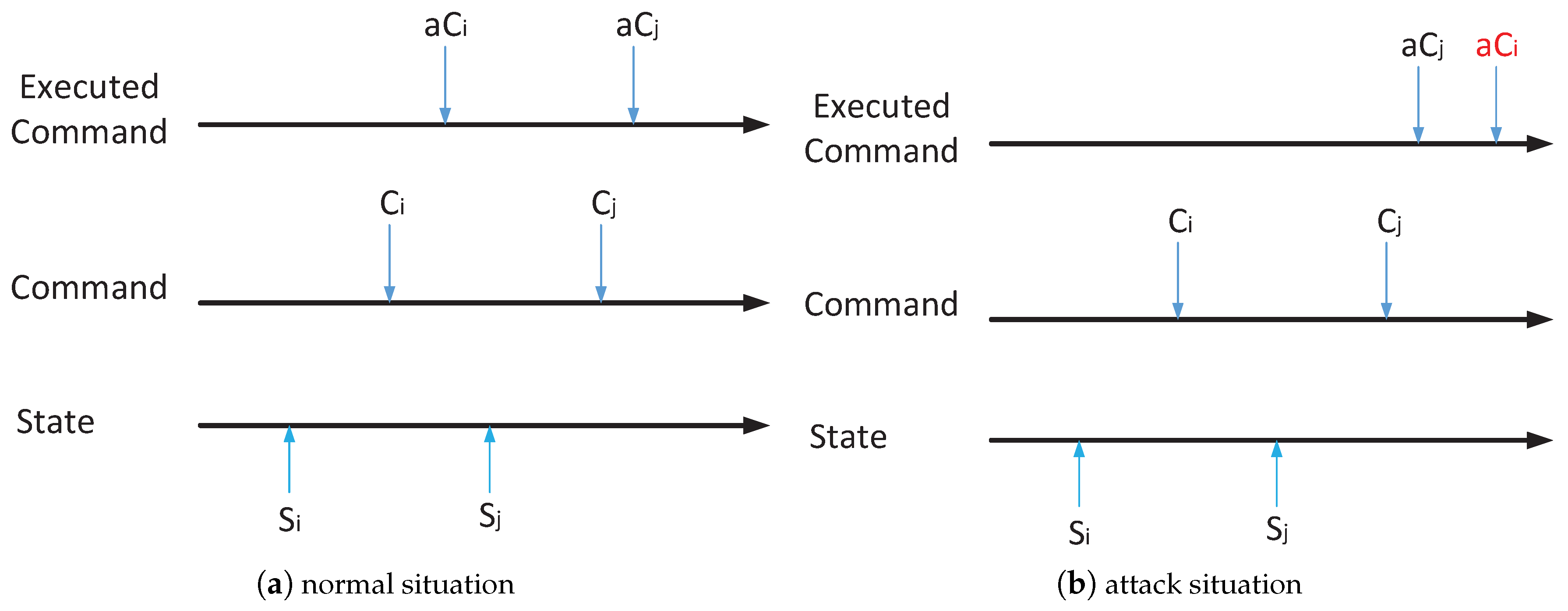
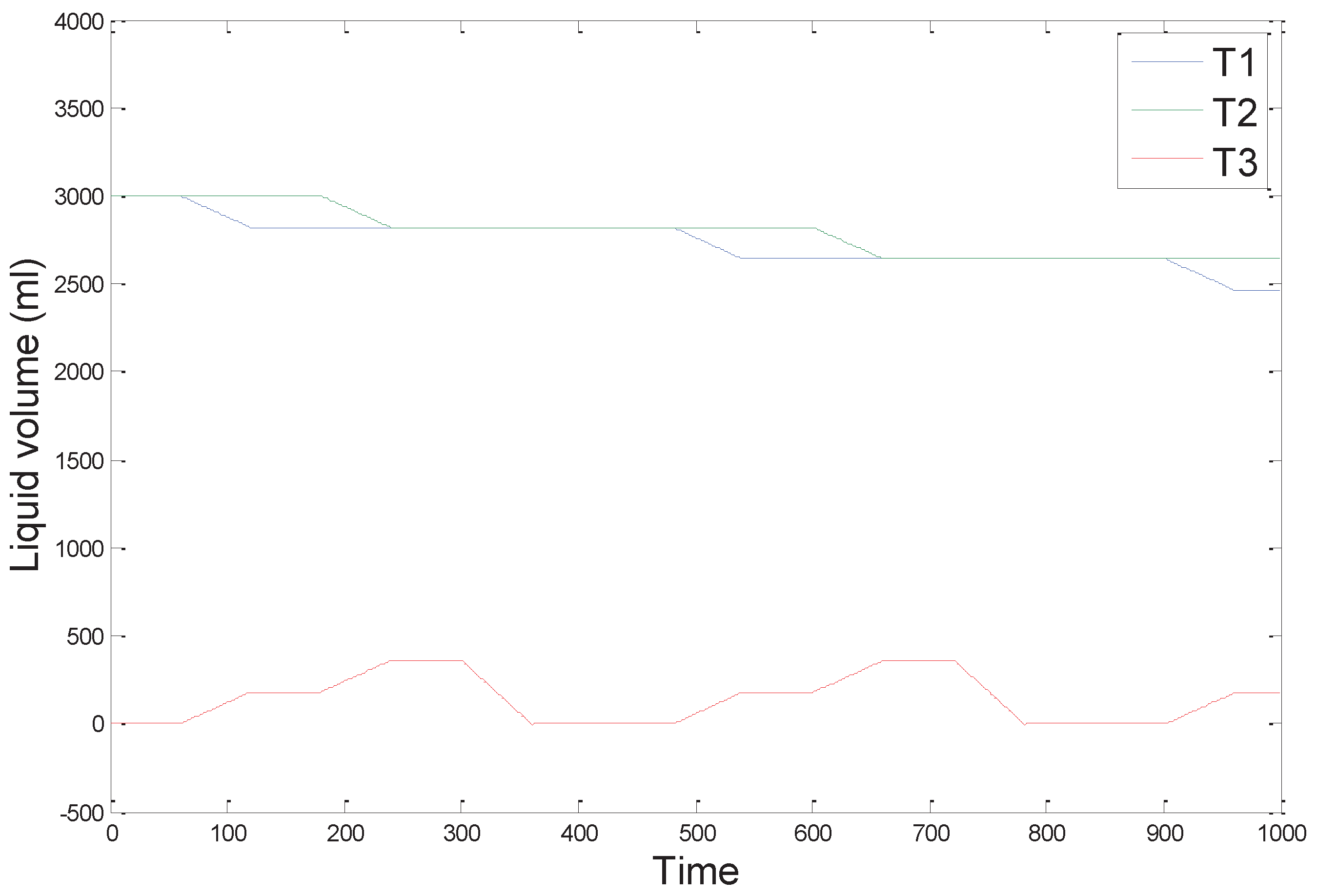
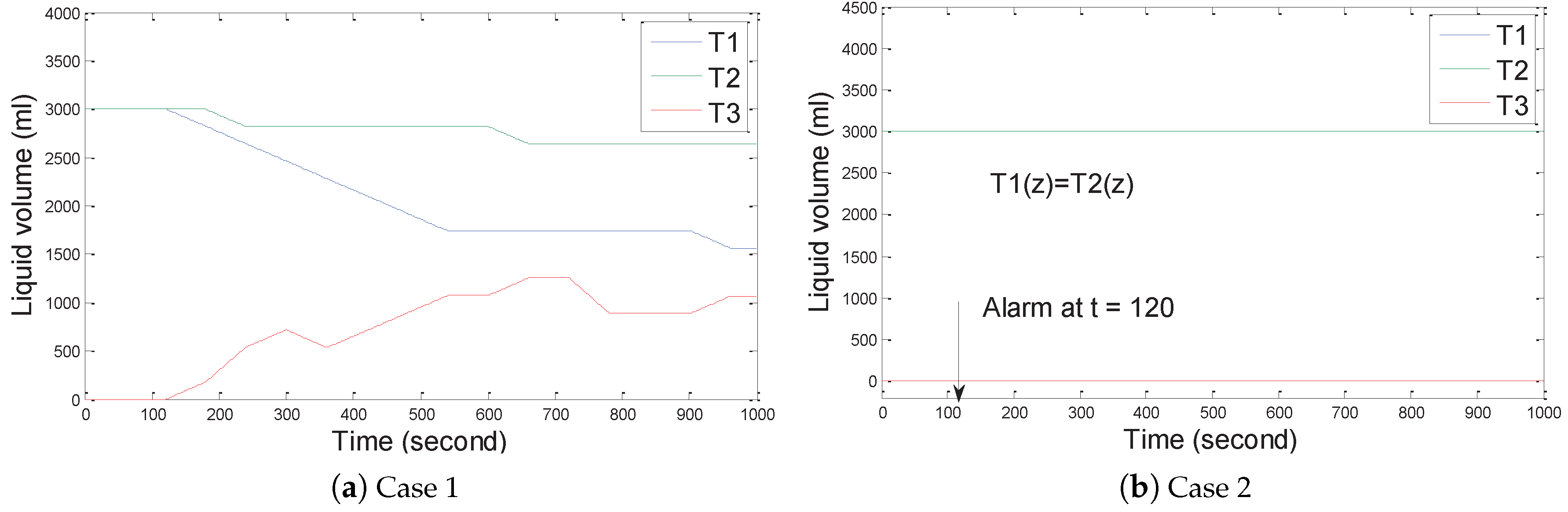
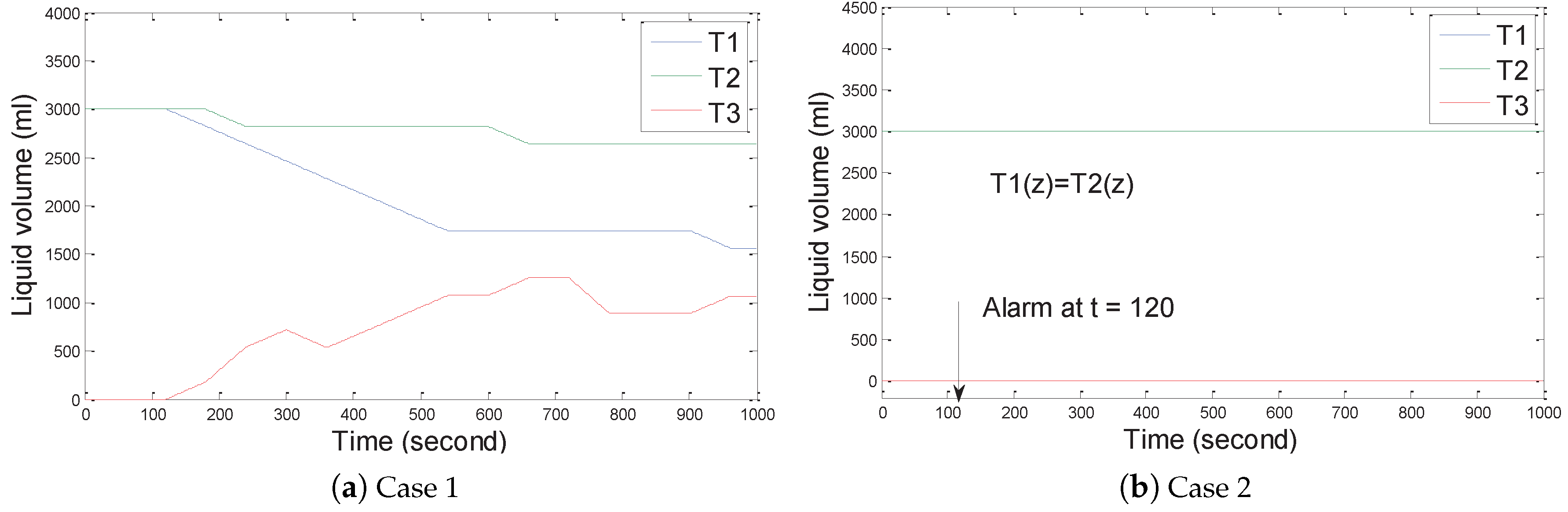
- Case 1: Attackers delay the disaggregation of until the command has been disaggregated. is disaggregated at s, and is disaggregated at s. The attacker injects false data about and to keep the same as Figure 7.
- Case 2: Attackers only delay the disaggregation of until the command has been disaggregated. The command is injected into the controller and disaggregated at s, and is disaggregated at s.
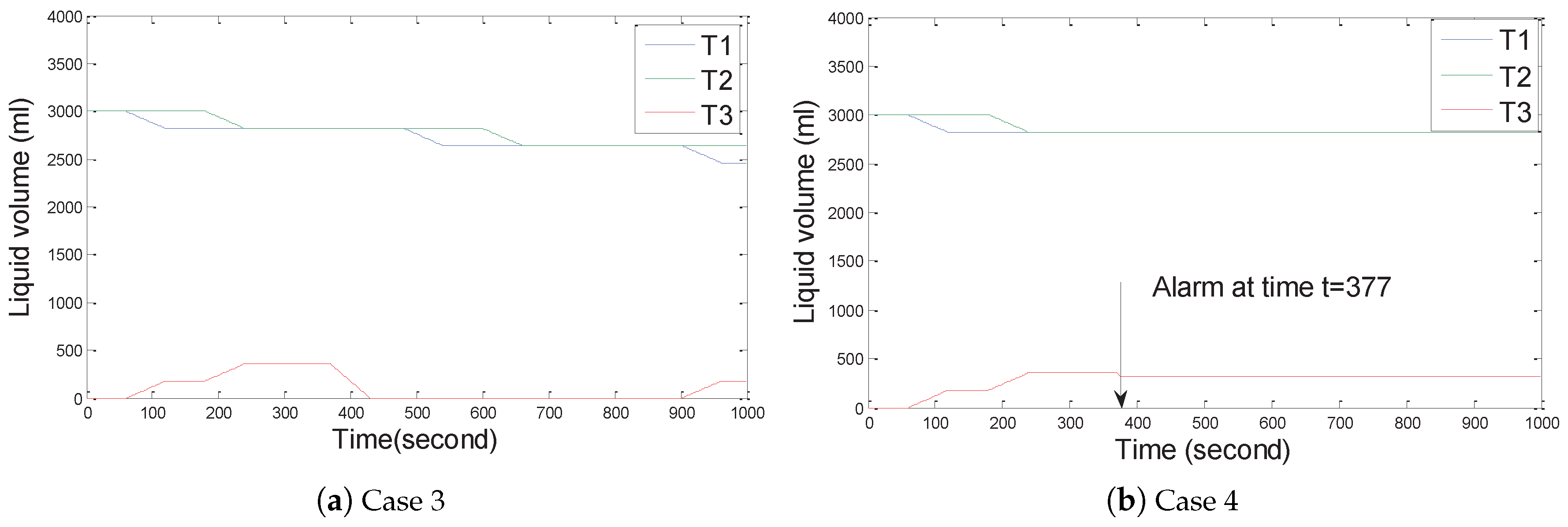
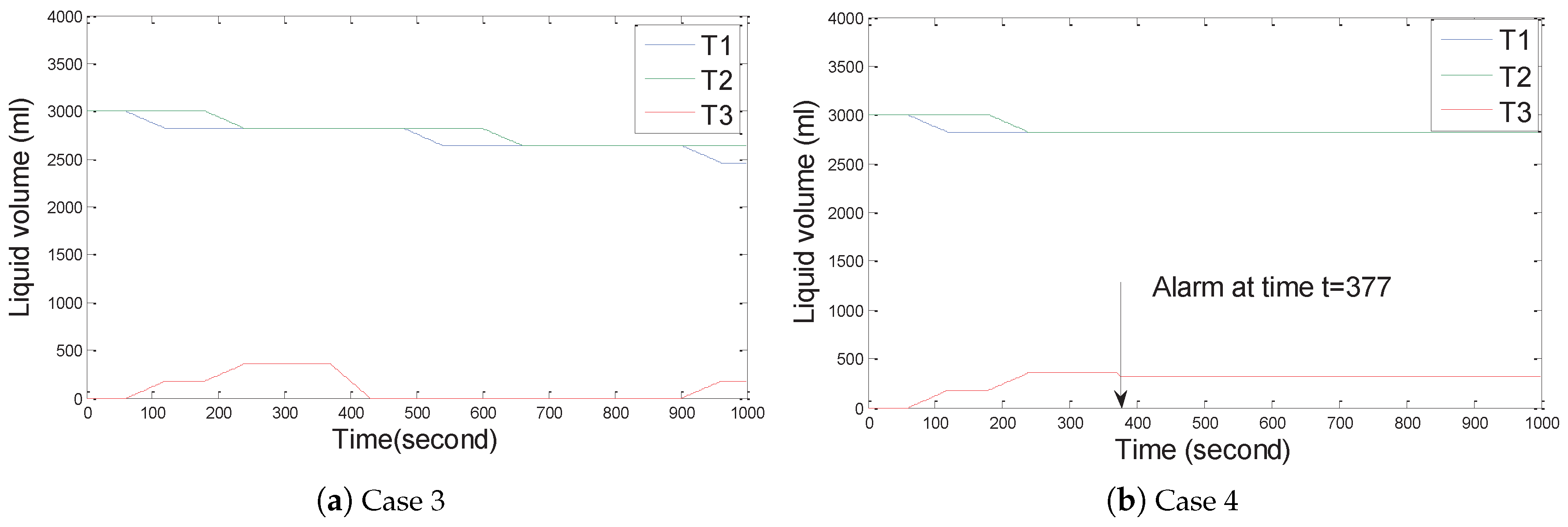
- Case 3: Attackers delay the disaggregation of until the command has been disaggregated. The command is disaggregated at s and is disaggregated at s. The attacker injects false data about to keep the same as Figure 7.
- Case 4: Attackers only delay the disaggregation until s. Under the normal situation, is issued at s.
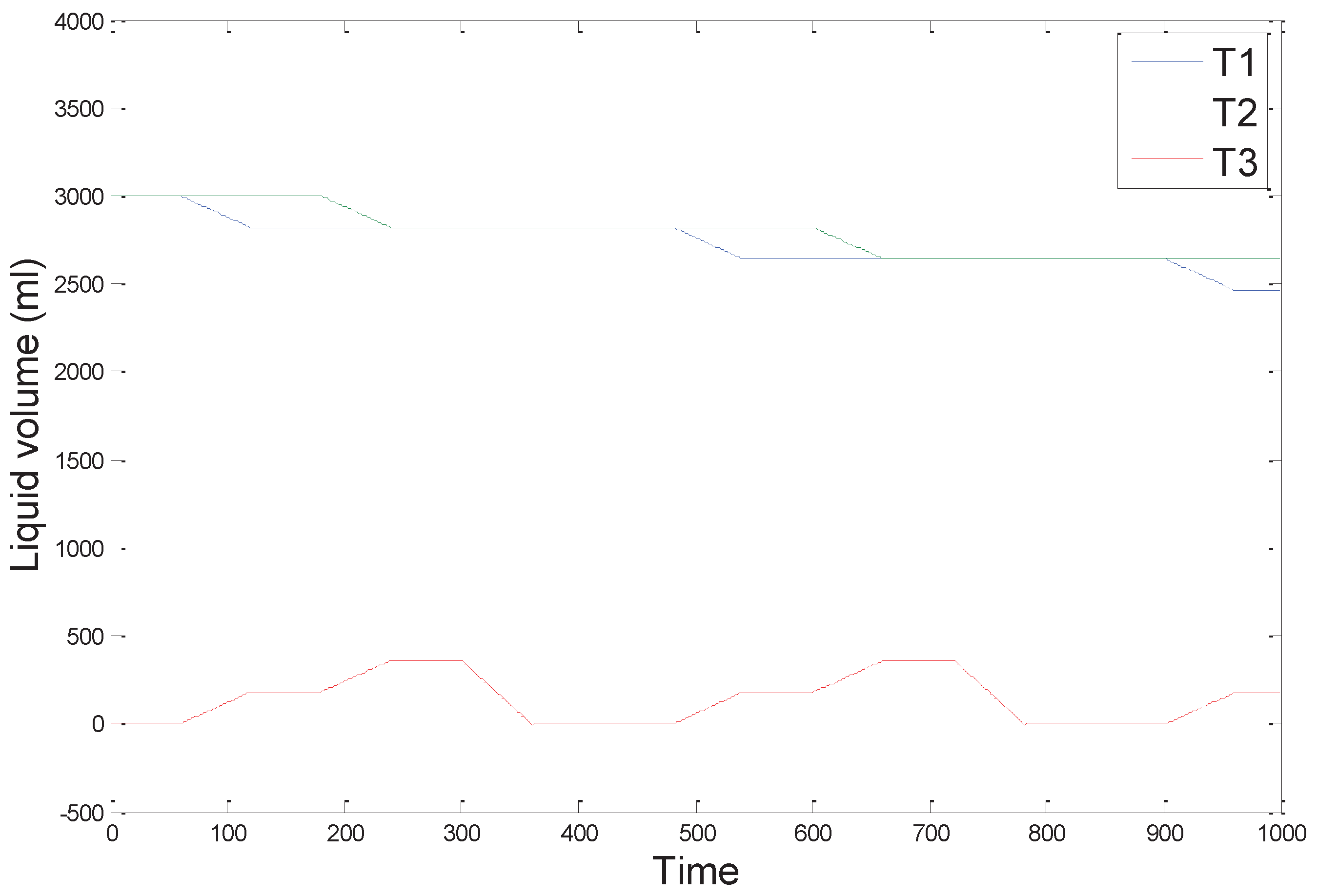
6.3. Impact of Attack
7. Discussion of Countermeasure
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pagliari, L.; Mirandola, R.; Trubiani, C. Multi-modeling Approach to Performance Engineering of Cyber-Physical Systems Design. In Proceedings of the 2017 22nd International Conference on Engineering of Complex Computer Systems (ICECCS), Fukuoka, Japan, 5–8 November 2017; pp. 142–145. [Google Scholar]
- Tian, J.; Tan, R.; Guan, X.; Liu, T. Enhanced Hidden Moving Target Defense in Smart Grids. IEEE Trans. Smart Grid 2018. [Google Scholar] [CrossRef]
- Xun, P.; Zhu, P.D.; Maharjan, S.; Cui, P.S. Successive direct load altering attack in smart grid. Comput. Secur. 2018, 77, 79–93. [Google Scholar] [CrossRef]
- Liang, G.; Weller, S.R.; Zhao, J.; Luo, F.; Dong, Z.Y. The 2015 Ukraine Blackout: Implications for False Data Injection Attacks. IEEE Trans. Power Syst. 2017, 32, 3317–3318. [Google Scholar] [CrossRef]
- Liang, J.; Sankar, L.; Kosut, O. Vulnerability analysis and consequences of false data injection attack on power system state estimation. IEEE Trans. Power Syst. 2016, 31, 3864–3872. [Google Scholar] [CrossRef]
- Amini, S.; Mohsenian-Rad, H.; Pasqualetti, F. Dynamic load altering attacks in smart grid. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 18–20 February 2015; pp. 1–5. [Google Scholar]
- Wang, J.; Tu, W.; Hui, L.C.K.; Yiu, S.M.; Wang, E.K. Detecting Time Synchronization Attacks in Cyber-Physical Systems with Machine Learning Techniques. In Proceedings of the 2017 IEEE 37th International Conference on Distributed Computing Systems (ICDCS), Atlanta, GA, USA, 5–8 June 2017; pp. 2246–2251. [Google Scholar]
- Garcia, L.A.; Brasser, F.; Cintuglu, M.H.; Zonouz, S.A. Hey, My Malware Knows Physics! Attacking PLCs with Physical Model Aware Rootkit. In Proceedings of the 2017 Network and Distributed System Security Symposium (NDSS), San Diego, CA, USA, 26 February–1 March 2017; pp. 1–15. [Google Scholar]
- Lin, H.; Slagell, A.; Kalbarczyk, Z.; Sauer, P.W.; Iyer, R.K. Semantic Security Analysis of SCADA Networks to Detect Malicious Control Commands in Power Grids. In Proceedings of the First ACM Workshop on Smart Energy Grid Security, Berlin, Germany, 8 November 2013; pp. 29–34. [Google Scholar]
- Yuan, H.; Xia, Y. Resilient strategy design for cyber-physical system under DoS attack over a multi-channel framework. Inf. Sci. 2018, 454, 312–327. [Google Scholar] [CrossRef]
- Yi, P.; Zhu, T.; Zhang, Q.; Wu, Y.; Li, J. A denial of service attack in advanced metering infrastructure network. In Proceedings of the 2014 IEEE International Conference (ICC), Sydney, NSW, Australia, 10–14 June 2014; pp. 1029–1034. [Google Scholar]
- Zhang, H.; Zheng, W.X. Denial-of-Service Power Dispatch against Linear Quadratic Control via a Fading Channel. IEEE Trans. Autom. Control 2018, 63, 3032–3039. [Google Scholar] [CrossRef]
- Sargolzaei, A.; Yen, K.K.; Abdelghani, M.N.; Sargolzaei, S.; Carbunar, B. Resilient Design of Networked Control Systems Under Time Delay Switch Attacks, Application in Smart Grid. IEEE Access 2017, 5, 15901–15912. [Google Scholar] [CrossRef]
- Sargolzaei, A.; Yen, K.K.; Abdelghani, M.N. Preventing Time-Delay Switch Attack on Load Frequency Control in Distributed Power Systems. IEEE Trans. Smart Grid 2016, 7, 1176–1185. [Google Scholar] [CrossRef]
- Li, W.; Xie, L.; Deng, Z.; Wang, Z. False sequential logic attack on scada system and its physical impact analysis. Comput. Secur. 2016, 58, 149–159. [Google Scholar] [CrossRef]
- Han, Y.; Zhu, M.; Liu, C. A Service-Oriented Approach to Modeling and Reusing Event Correlations. In Proceedings of the 2018 IEEE 42nd Annual Computer Software and Applications Conference (COMPSAC), Tokyo, Japan, 23–27 July 2018; pp. 498–507. [Google Scholar]
- Vu, Q.D.; Tan, R.; Yau, D.K.Y. On Applying Fault Detectors against False Data Injection Attacks in Cyber-Physical Control Systems. In Proceedings of the IEEE INFOCOM 2016—35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar]
- Abdullah, A.F.M.; Rokka, C.S.; Arquimedes, C.; Jiang, W. Acoustic Side-channel Attacks on Additive Manufacturing Systems. In Proceedings of the 7th International Conference on Cyber-Physical Systems, Vienna, Austria, 11–14 April 2016; p. 19. [Google Scholar]
- Hu, L.; Wang, Z.; Han, Q.L.; Liu, X. State estimation under false data injection attacks: Security analysis and system protection. Automatica 2018, 87, 176–183. [Google Scholar] [CrossRef]
- Min, B.; Varadharajan, V. Cascading attacks against smart grid using control command disaggregation and services. In Proceedings of the 31st Annual ACM Symposium on Applied Computing, Pisa, Italy, 4–8 April 2016; pp. 2142–2147. [Google Scholar]
- Remmersmann, T.; Schade, U.; Schlick, C. Supervisory control of multi-robot systems by disaggregation and scheduling of quasi-natural language commands. In Proceedings of the 2012 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Seoul, Korea, 14–17 October 2012; pp. 315–320. [Google Scholar]
- Taft, J.D. Control Command Disaggregation and Distribution within a Utility Grid. U.S. Patent Application No 13/484,042, 30 May 2012. [Google Scholar]
- Sargolzaei, A.; Yen, K.; Abdelghani, M.N. Delayed inputs attack on load frequency control in smart grid. In Proceedings of the ISGT 2014 IEEE, Washington, DC, USA, 19–22 February 2014; pp. 1–5. [Google Scholar]
- Shiva, S.; Dharam, R.; Shandilya, V. Runtime Monitors as Sensors of Security Systems. In Proceedings of the 23rd IASTED International Conference, Dallas, TX, USA, 14–16 December 2011. [Google Scholar]
- Pan, S.; Morris, T.; Adhikari, U. Developing a hybrid intrusion detection system using data mining for power systems. IEEE Trans. Smart Grid 2015, 6, 3104–3113. [Google Scholar] [CrossRef]
- Shandilya, V.; Simmons, C.B.; Shiva, S. Use of attack graphs in security systems. J. Comput. Netw. Commun. 2014, 2014. [Google Scholar] [CrossRef]
- Renganathan, K.; Bhaskar, V. Observer based on-line fault diagnosis of continuous systems modeled as Petri nets. ISA Trans. 2010, 49, 587–595. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Command/Time Series | Description |
|---|---|
| Switch on/off Pump 11 and Pump 21 | |
| Switch on/off Pump 12 and Pump 22 | |
| Open/Close Valve | |
| Measurements of Sensor 1 | |
| Measurements of Sensor 2 | |
| Measurements of Sensor 3 |
| Control | Constraints | Step |
|---|---|---|
| Step 1 | ||
| and After ≥ 1 min | Step 2 | |
| and After ≥ 1 min | Step 3 | |
| and After ≥ 1 min | Step 4 | |
| and After ≥ 1 min | Step 5 | |
| and After ≥ 2 min | Step 6 |
| State | Description |
|---|---|
| and | |
| and | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, Y.; Yang, Z.; Wang, B.; Xun, P.; Deng, T. False Sequential Command Attack of Large-Scale Cyber-Physical Systems. Electronics 2018, 7, 176. https://doi.org/10.3390/electronics7090176
Xiong Y, Yang Z, Wang B, Xun P, Deng T. False Sequential Command Attack of Large-Scale Cyber-Physical Systems. Electronics. 2018; 7(9):176. https://doi.org/10.3390/electronics7090176
Chicago/Turabian StyleXiong, Yinqiao, Ziyu Yang, Baoyao Wang, Peng Xun, and Tiantian Deng. 2018. "False Sequential Command Attack of Large-Scale Cyber-Physical Systems" Electronics 7, no. 9: 176. https://doi.org/10.3390/electronics7090176
APA StyleXiong, Y., Yang, Z., Wang, B., Xun, P., & Deng, T. (2018). False Sequential Command Attack of Large-Scale Cyber-Physical Systems. Electronics, 7(9), 176. https://doi.org/10.3390/electronics7090176