Optimal Control of a Compact Converter in an AC Microgrid



Abstract
:1. Introduction
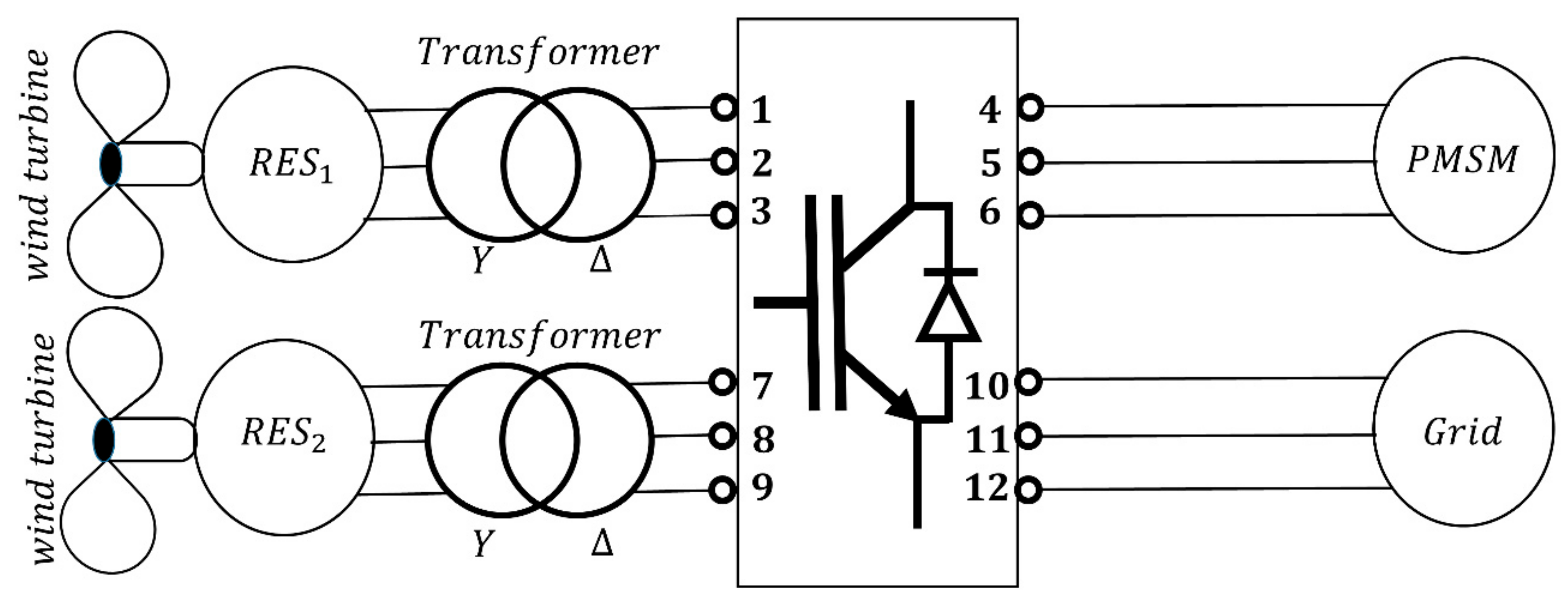
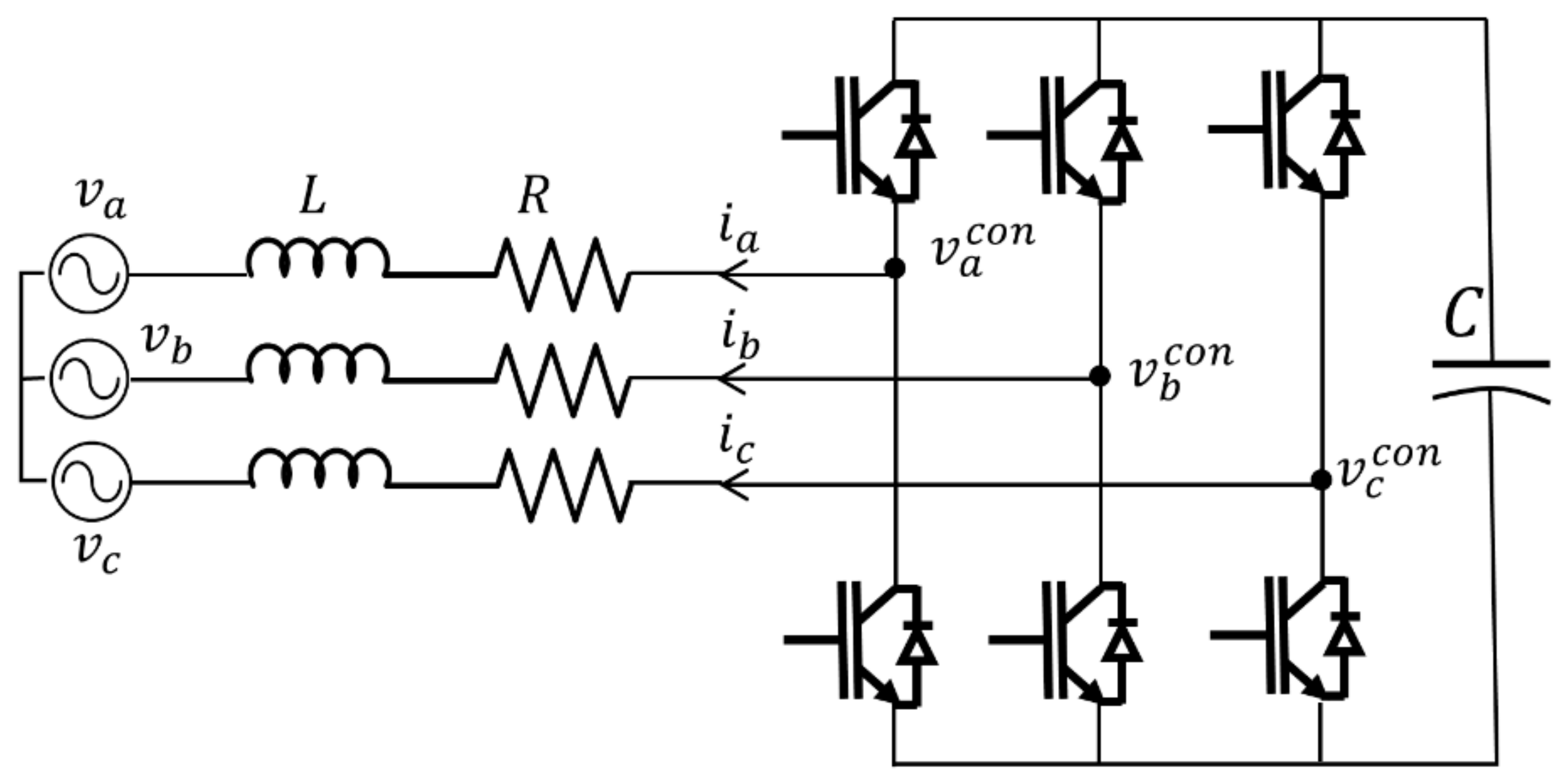
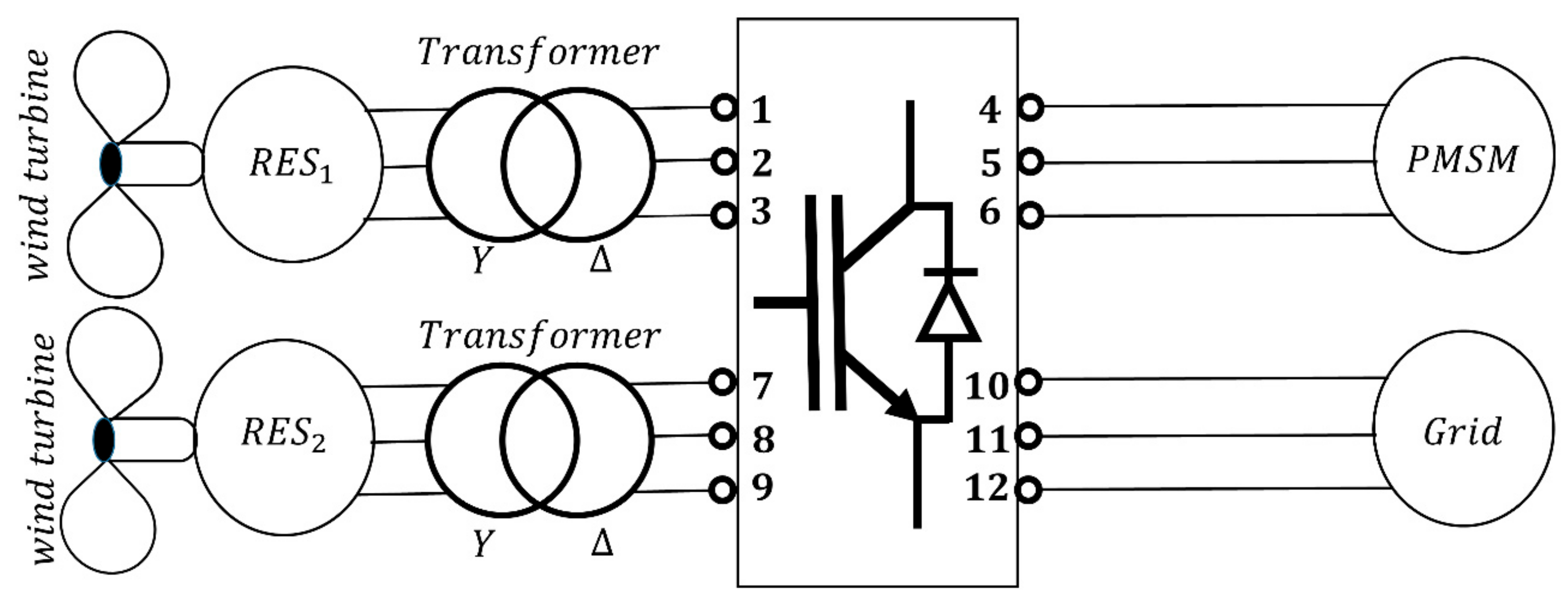
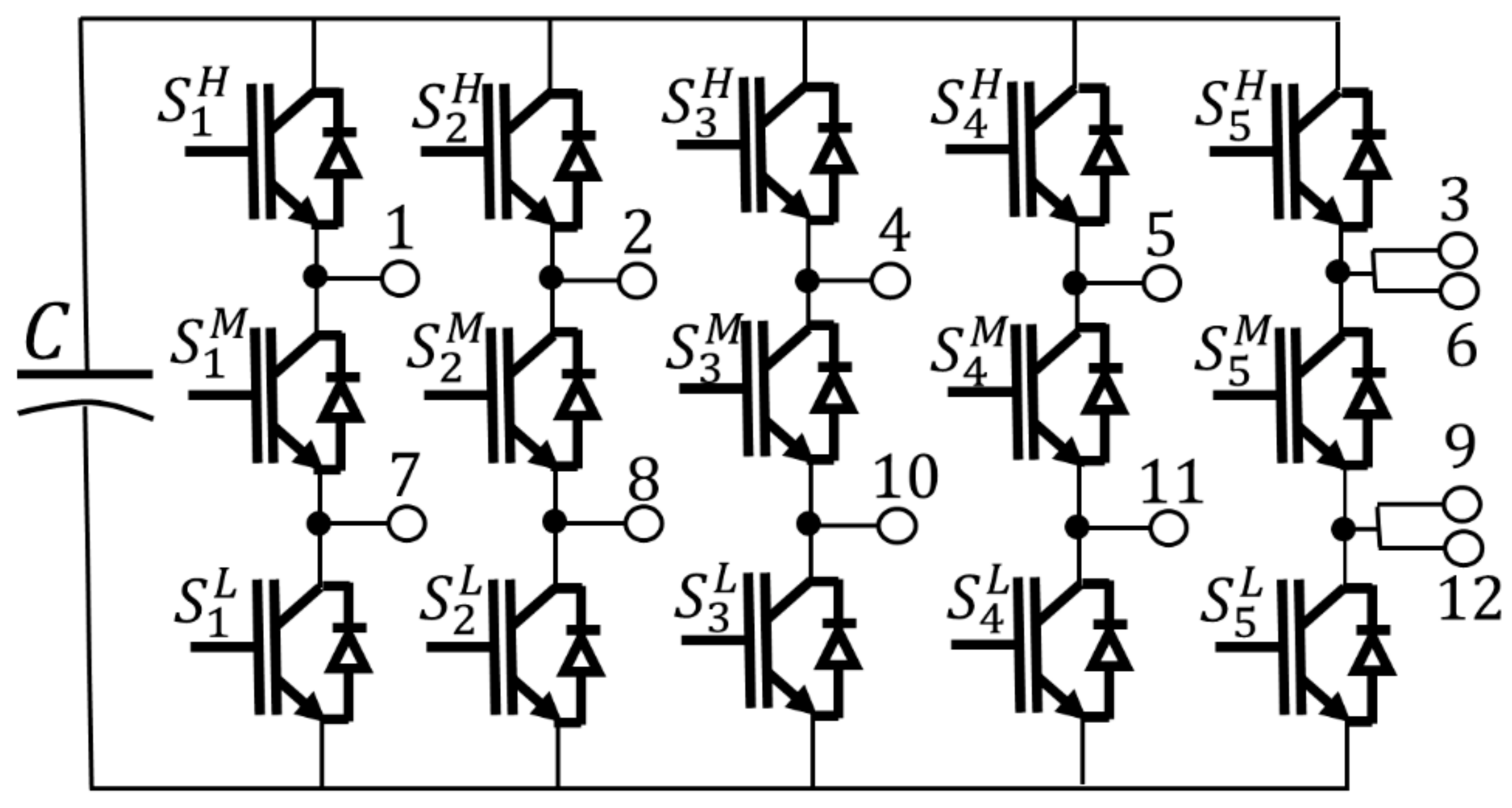
2. Compact Reduced Switch Count AC/AC Converter
2.1. Generalized PWM
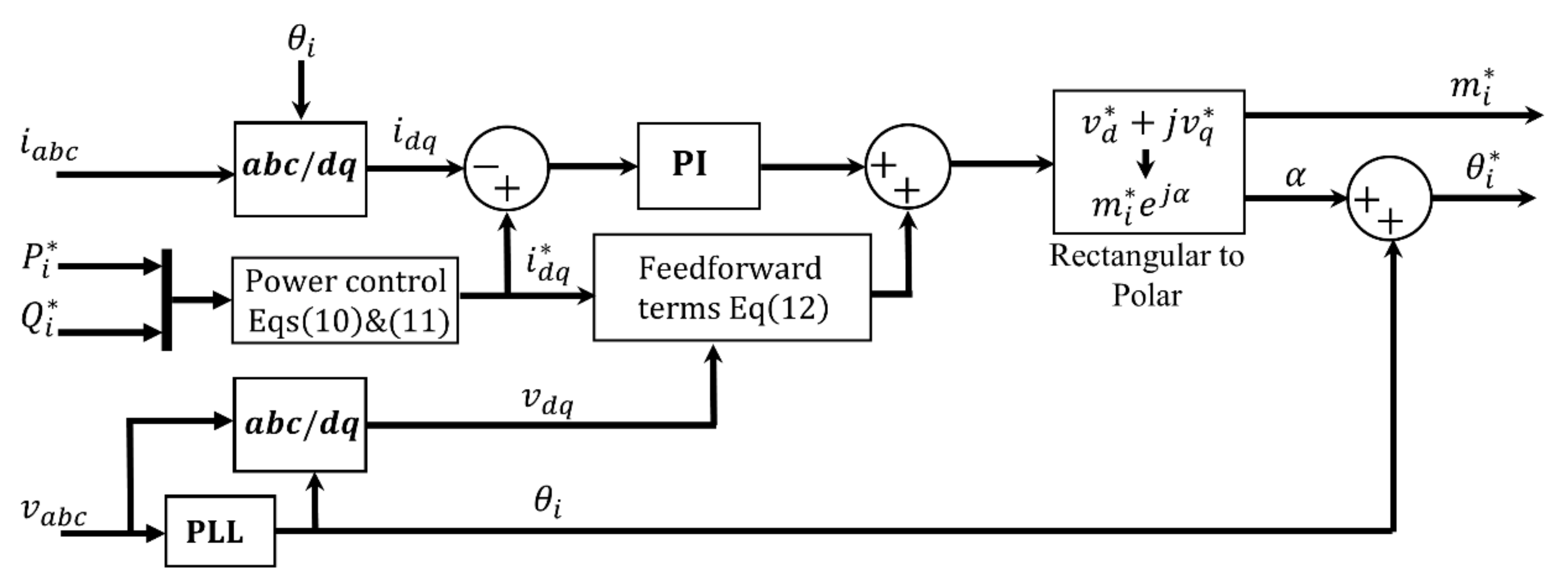
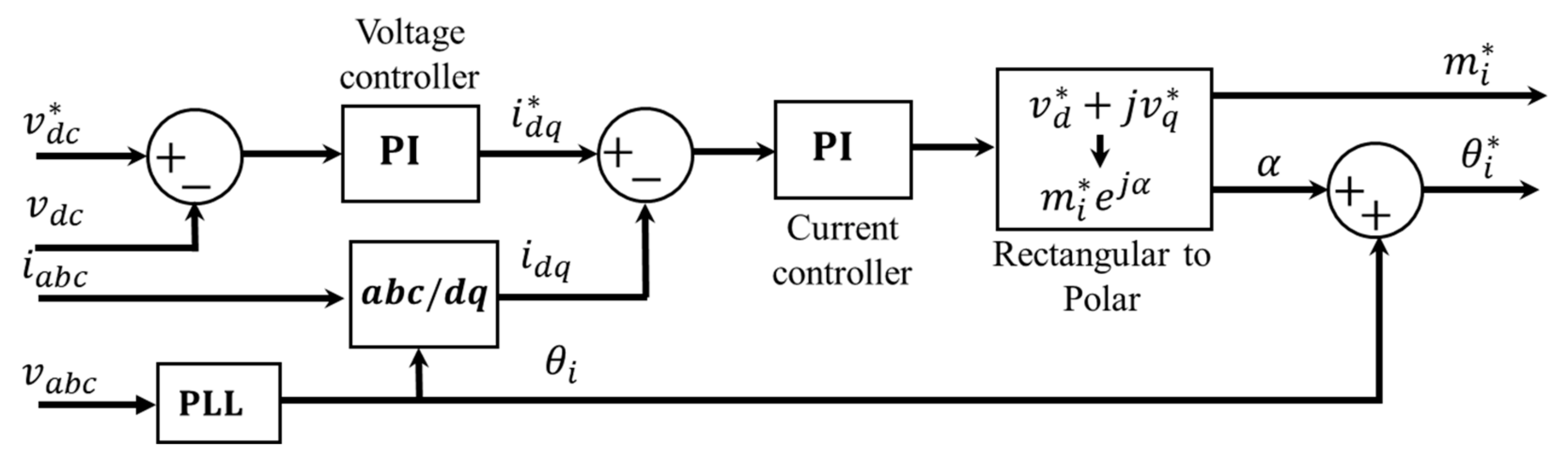
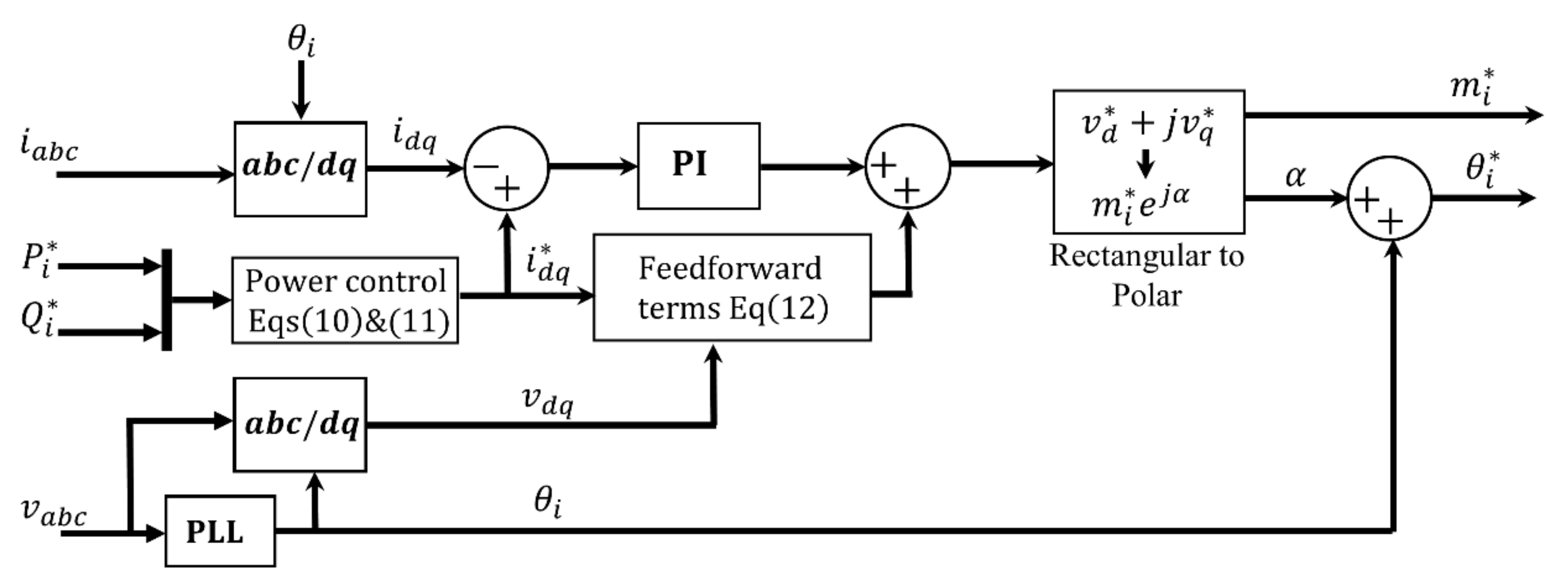
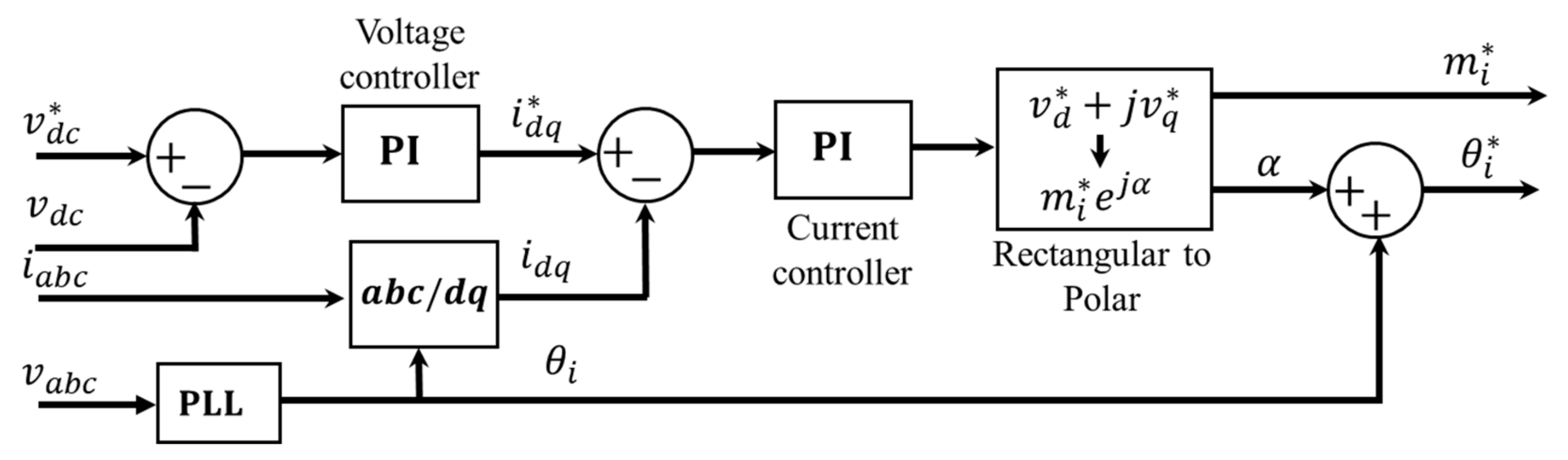
2.2. Control Method
3. Optimal Tuning of Converter Controllers
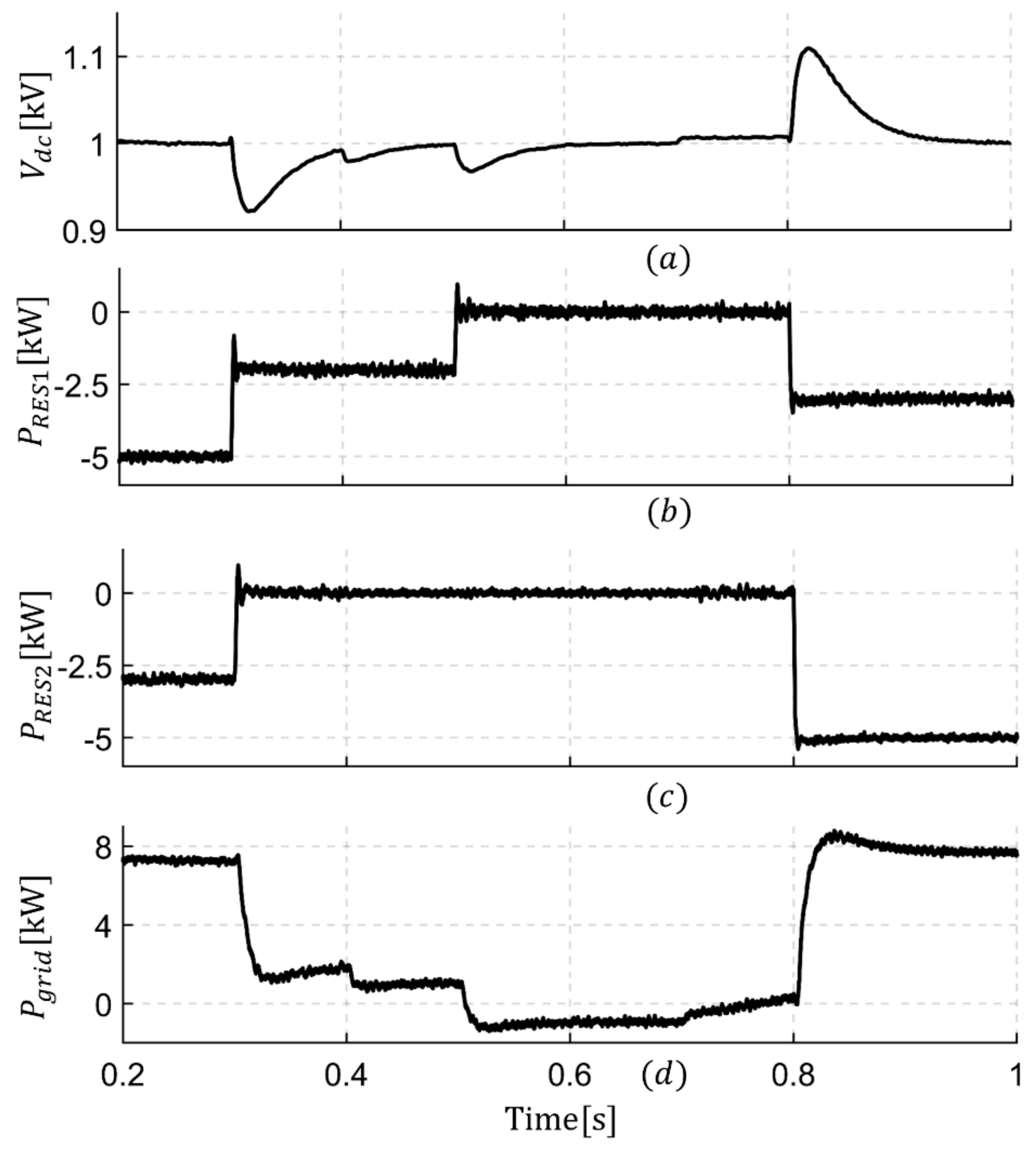
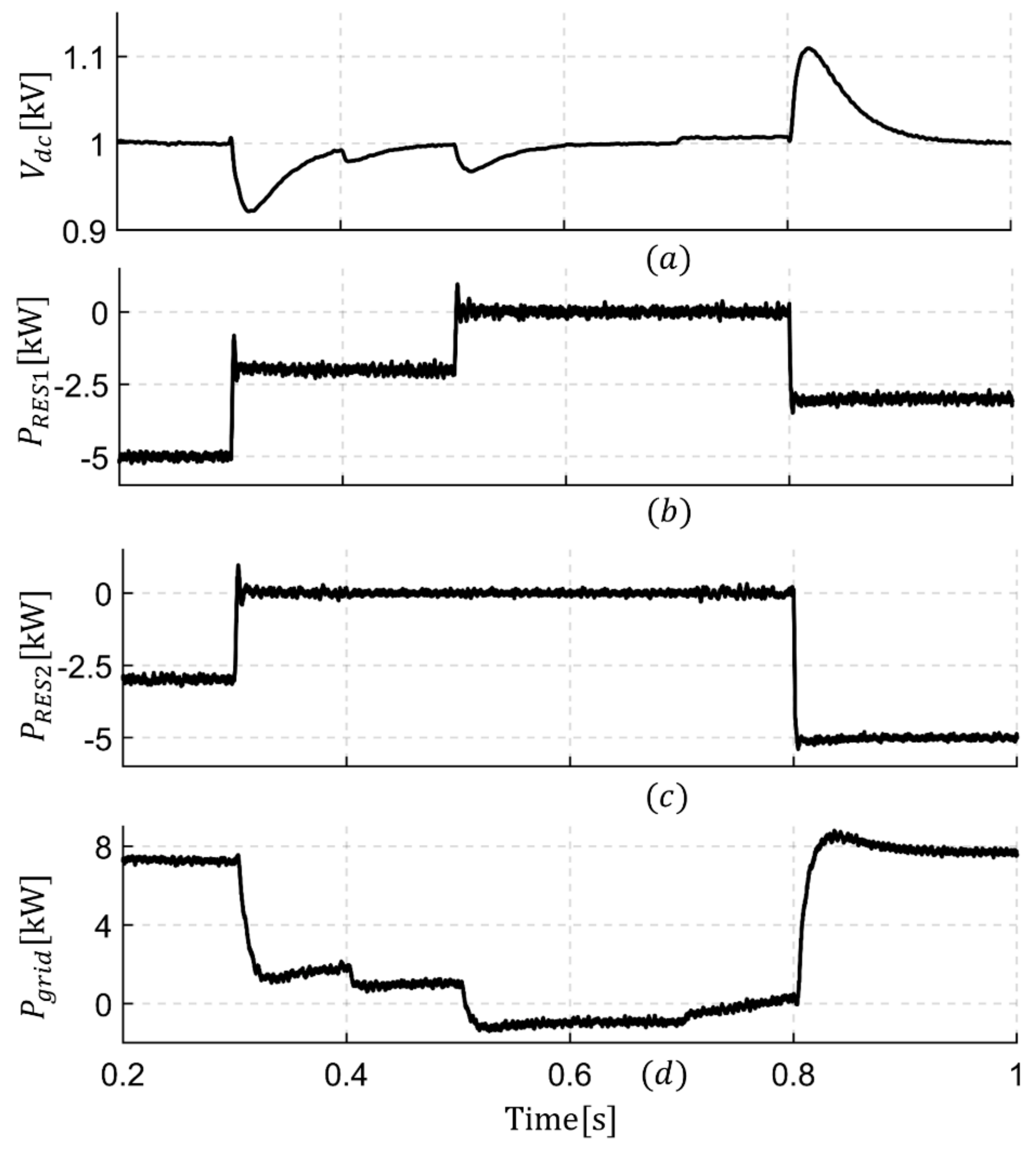
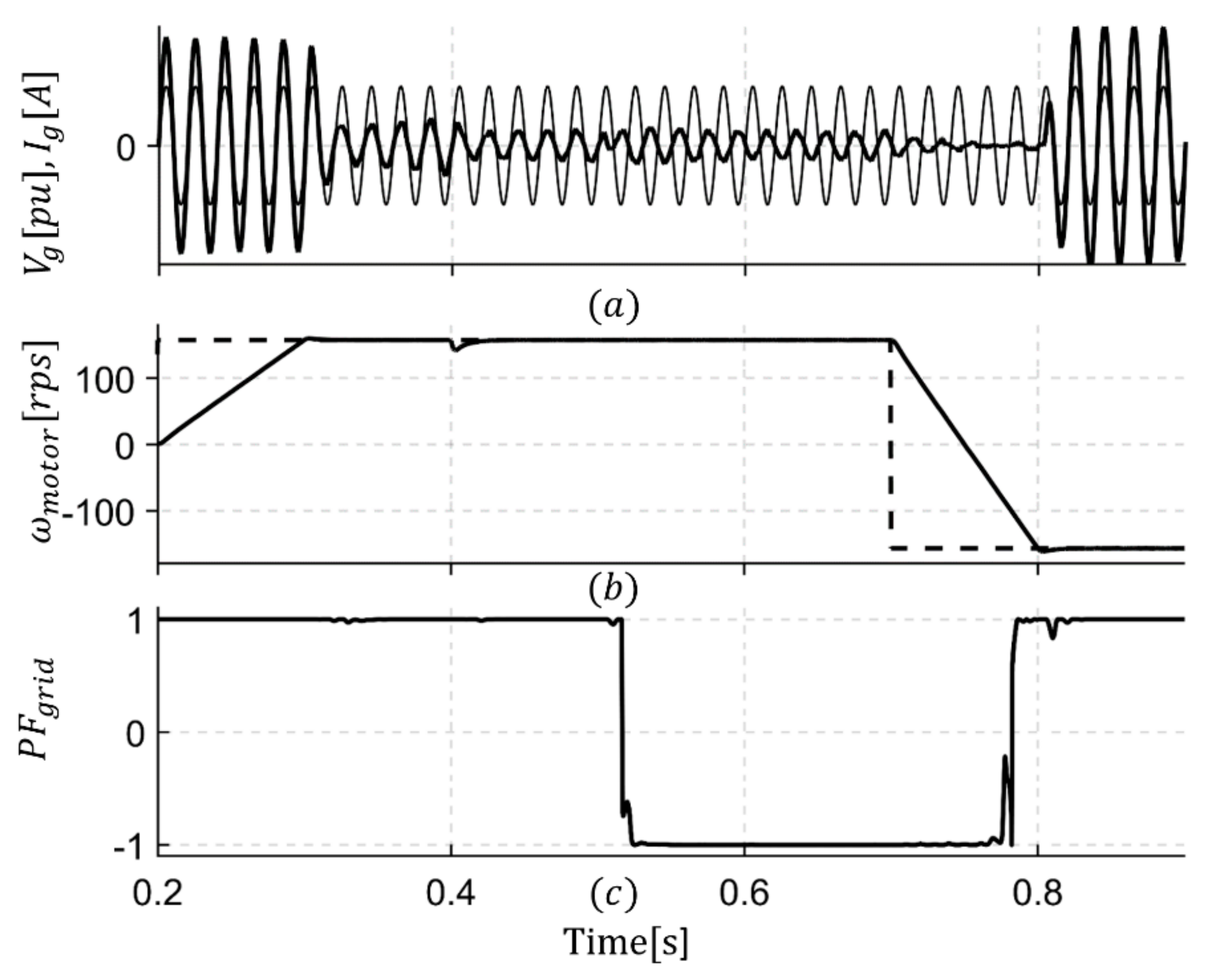
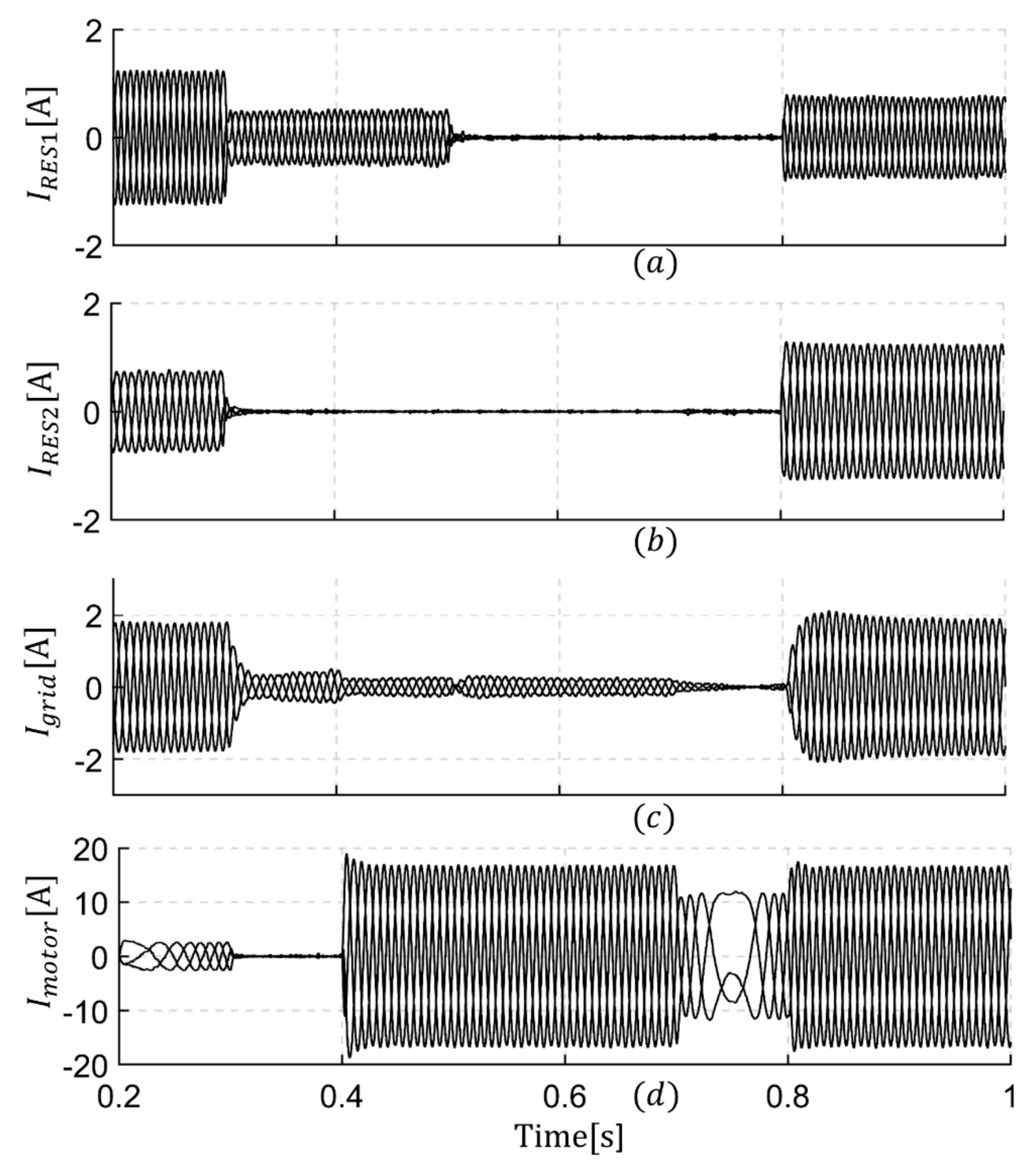
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Smadi, I.; Albatran, S.; Ahmad, H. On the Performance Optimization of Two-Level Three-Phase Grid-Feeding Voltage-Source Inverters. Energies 2018, 11, 400. [Google Scholar] [CrossRef]
- Netsanet, S.; Zhang, J.; Zheng, D. Bagged Decision Trees Based Scheme of Microgrid Protection Using Windowed Fast Fourier and Wavelet Transforms. Electronics 2018, 7, 61. [Google Scholar] [CrossRef]
- Nejabatkhah, F.; Li, Y. Overview of Power Management Strategies of Hybrid AC/DC Microgrid. IEEE Trans. Power Electron. 2015, 30, 7072–7089. [Google Scholar] [CrossRef]
- Malik, S.; Ai, X.; Sun, Y.; Zhengqi, C.; Shupeng, Z. Voltage and frequency control strategies of hybrid AC/DC microgrid: A review. IET Gener. Transm. Distrib. 2017, 11, 303–313. [Google Scholar] [CrossRef]
- Rauf, A.; Sant, A.; Khadkikar, V.; Zeineldin, H. A Novel Ten-Switch Topology for Unified Power Quality Conditioner. IEEE Trans. Power Electron. 2016, 31, 6937–6946. [Google Scholar] [CrossRef]
- Qin, Z.; Loh, P.; Blaabjerg, F. Power loss benchmark of nine-switch converters in three-phase online-UPS application. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014. [Google Scholar]
- Jones, M.; Levi, E.; Wright, P.; Vukosavic, S.; Dujic, D. Five-leg inverter PWM technique for reduced switch count two-motor constant power applications. IET Electr. Power Appl. 2008, 2, 275–287. [Google Scholar] [CrossRef]
- Zhang, L.; Loh, P.; Gao, F. An Integrated Nine-Switch Power Conditioner for Power Quality Enhancement and Voltage Sag Mitigation. IEEE Trans. Power Electron. 2012, 27, 1177–1190. [Google Scholar] [CrossRef]
- Diab, M.; Elserougi, A.; Abdel-Khalik, A.; Massoud, A.; Ahmed, S. A Nine-Switch-Converter-Based Integrated Motor Drive and Battery Charger System for EVs Using Symmetrical Six-Phase Machines. IEEE Trans. Ind. Electron. 2016, 63, 5326–5335. [Google Scholar] [CrossRef]
- Ajami, A.; Alizadeh, R.; Elmi, M. Design and control of a grid tied 6-switch converter for two independent low power wind energy resources based on PMSGs with MPPT capability. Renew. Energy 2016, 87, 532–543. [Google Scholar] [CrossRef]
- Albatran, S.; Smadi, I.; Alsyouf, M. Experimental Validation of Shared Inverter Topology to Drive Multi AC-Loads. Int. J. Electr. Comput. Eng. 2018, 8, 793. [Google Scholar] [CrossRef]
- Dabour, S.; Rashad, E.; Abdel-khalik, A.; Ahmed, S.; Massoud, A. A new fifteen-switch inverter topology for two five-phase motors drive. In Proceedings of the 2016 Eighteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 27–29 December 2016. [Google Scholar]
- Smadi, I.; Albatran, S.; Alsyouf, M. A novel compact AC/AC converter for hybrid microgrids. In Proceedings of the 2017 IEEE 6th International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017. [Google Scholar]
- Kominami, T.; Fujimoto, Y. A Novel Nine-Switch Inverter for Independent Control of Two Three-Phase Loads. In Proceedings of the 2007 IEEE Industry Applications Annual Meeting, New Orleans, LA, USA, 23–27 September 2007. [Google Scholar]
- Kominami, T.; Fujimoto, Y. Inverter with Reduced Switching-Device Count for Independent AC Motor Control. In Proceedings of the IECON 2007—33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007. [Google Scholar]
- Delarue, P.; Bouscayrol, A.; Francois, B. Control implementation of a five-leg voltage-source-inverter supplying two three-phase induction machines. In Proceedings of the IEEE International Electric Machines and Drives Conference, Madison, WI, USA, 1–4 June 2003. [Google Scholar]
- Del Valle, Y.; Venayagamoorthy, G.; Mohagheghi, S.; Hernandez, J.; Harley, R. Particle Swarm Optimization: Basic Concepts, Variants and Applications in Power Systems. IEEE Trans. Evol. Comput. 2008, 12, 171–195. [Google Scholar] [CrossRef]
- Parsopoulos, K.E.; Vrahatis, M.N. Particle Swarm Optimization and Intelligence: Advances and Applications; Information Science Reference; IGI Global: Hershey, PA, USA, 2010. [Google Scholar]
- Engelbrecht, A. Computational Intelligence; John Wiley & Sons: Chichester, UK, 2008; Chapter 16. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Converter Side | Controller | Parameters | Values |
|---|---|---|---|
| Drive | Motor Speed | 1.1 | |
| 100.45 | |||
| Motor -axis Current | 11.98 | ||
| 1297.27 | |||
| Motor -axis Current | 29.96 | ||
| 1297.27 | |||
| Grid | dc Voltage | 8.09 | |
| 195.2 | |||
| -axis Current | 0.91 | ||
| 59.86 | |||
| RES | -axis Current | 0.91 | |
| 59.86 |
| Parameters | Values |
|---|---|
| Swarm size | 20 |
| Inertia coefficient () | According to Equation (21) |
| Cognitive factor () | 1.5 |
| Social factor () | 2 |
| Number of iterations () | 500 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Smadi, I.A.; Albatran, S.; Alsyouf, M.A. Optimal Control of a Compact Converter in an AC Microgrid. Electronics 2018, 7, 102. https://doi.org/10.3390/electronics7070102
Smadi IA, Albatran S, Alsyouf MA. Optimal Control of a Compact Converter in an AC Microgrid. Electronics. 2018; 7(7):102. https://doi.org/10.3390/electronics7070102
Chicago/Turabian StyleSmadi, Issam A., Saher Albatran, and Mohammad A. Alsyouf. 2018. "Optimal Control of a Compact Converter in an AC Microgrid" Electronics 7, no. 7: 102. https://doi.org/10.3390/electronics7070102
APA StyleSmadi, I. A., Albatran, S., & Alsyouf, M. A. (2018). Optimal Control of a Compact Converter in an AC Microgrid. Electronics, 7(7), 102. https://doi.org/10.3390/electronics7070102