Parameter Identification of DC-DC Converters under Steady-State and Transient Conditions Based on White-Box Models




Abstract
1. Introduction
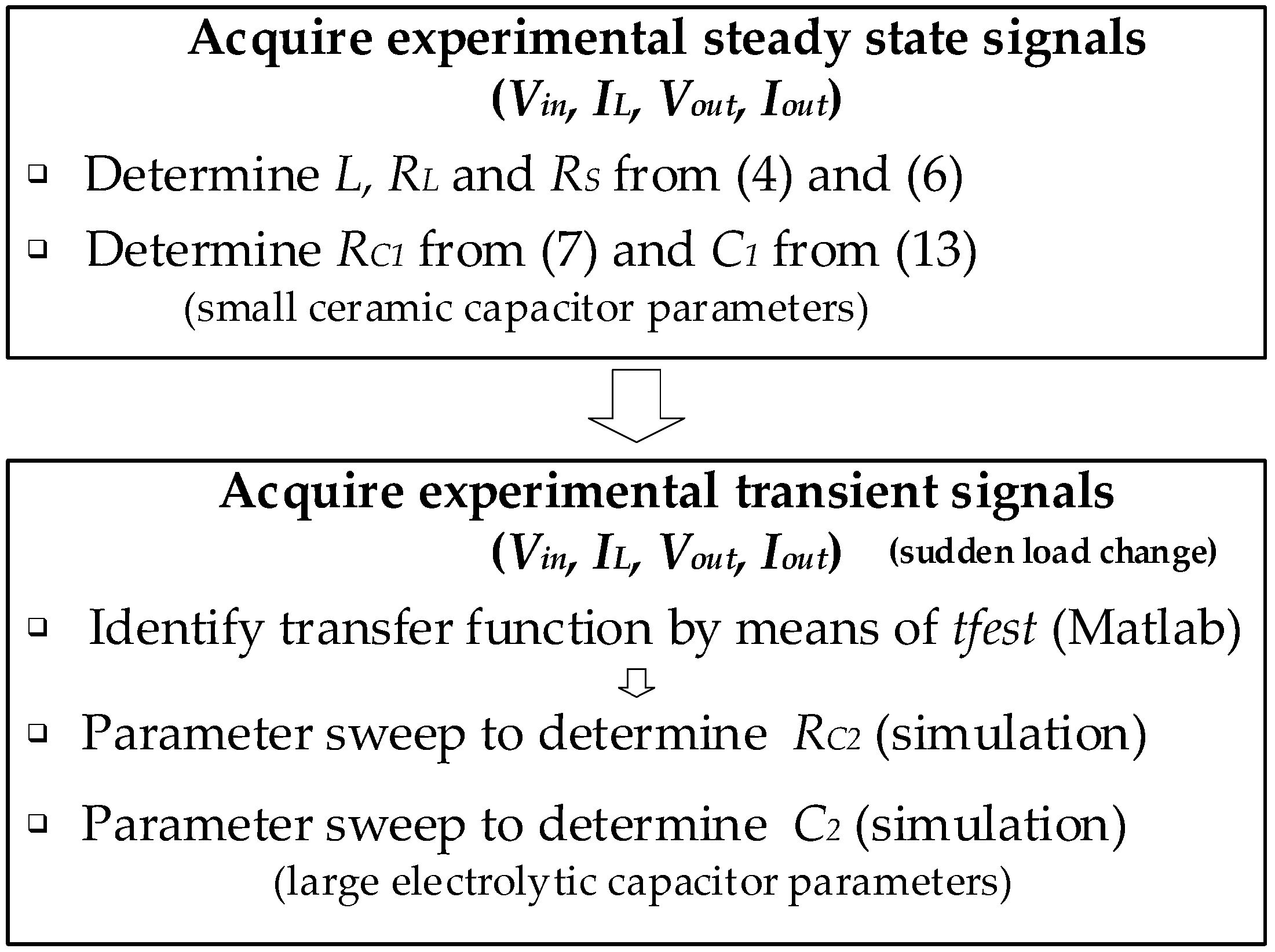
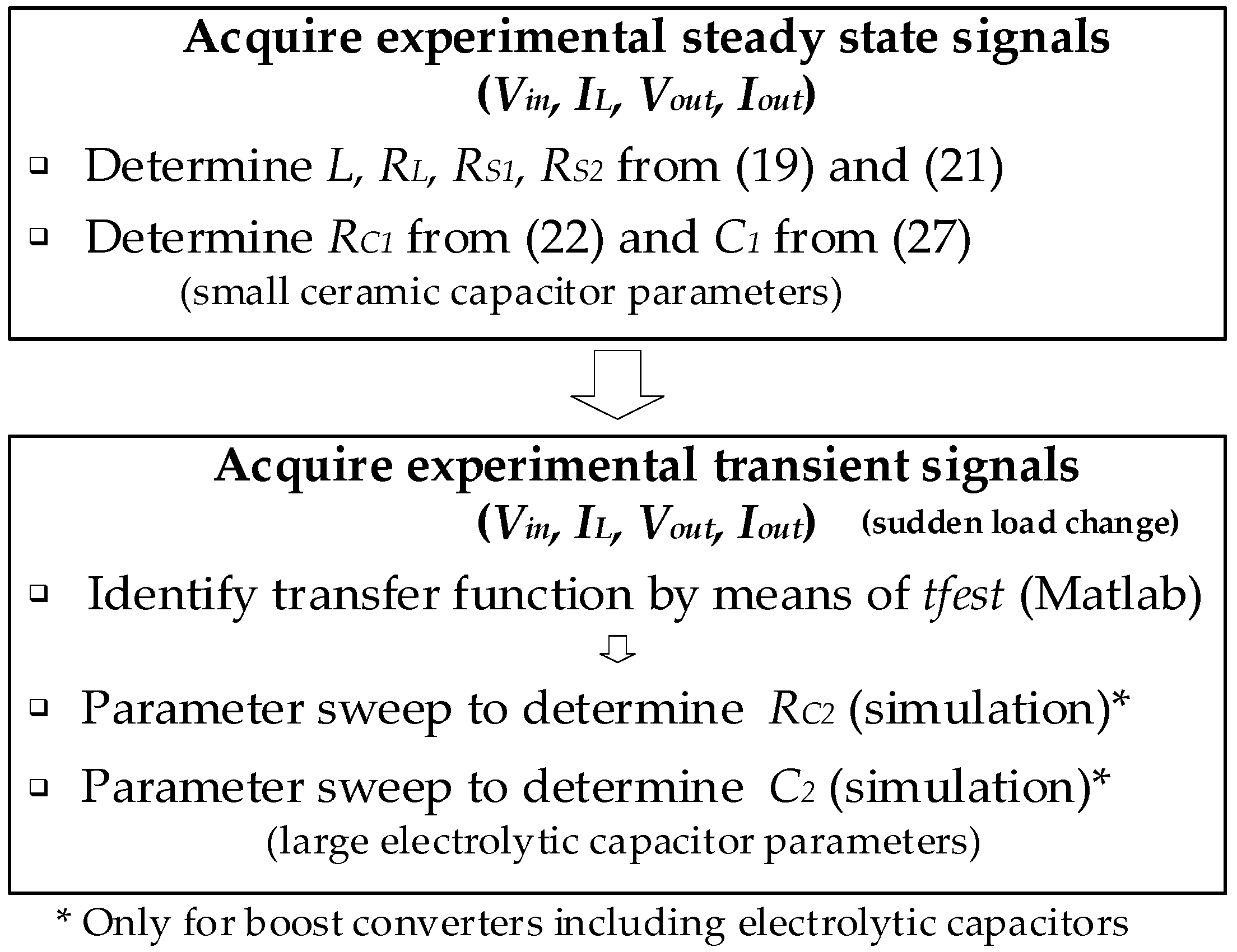
2. The Proposed Parameter Identification Method
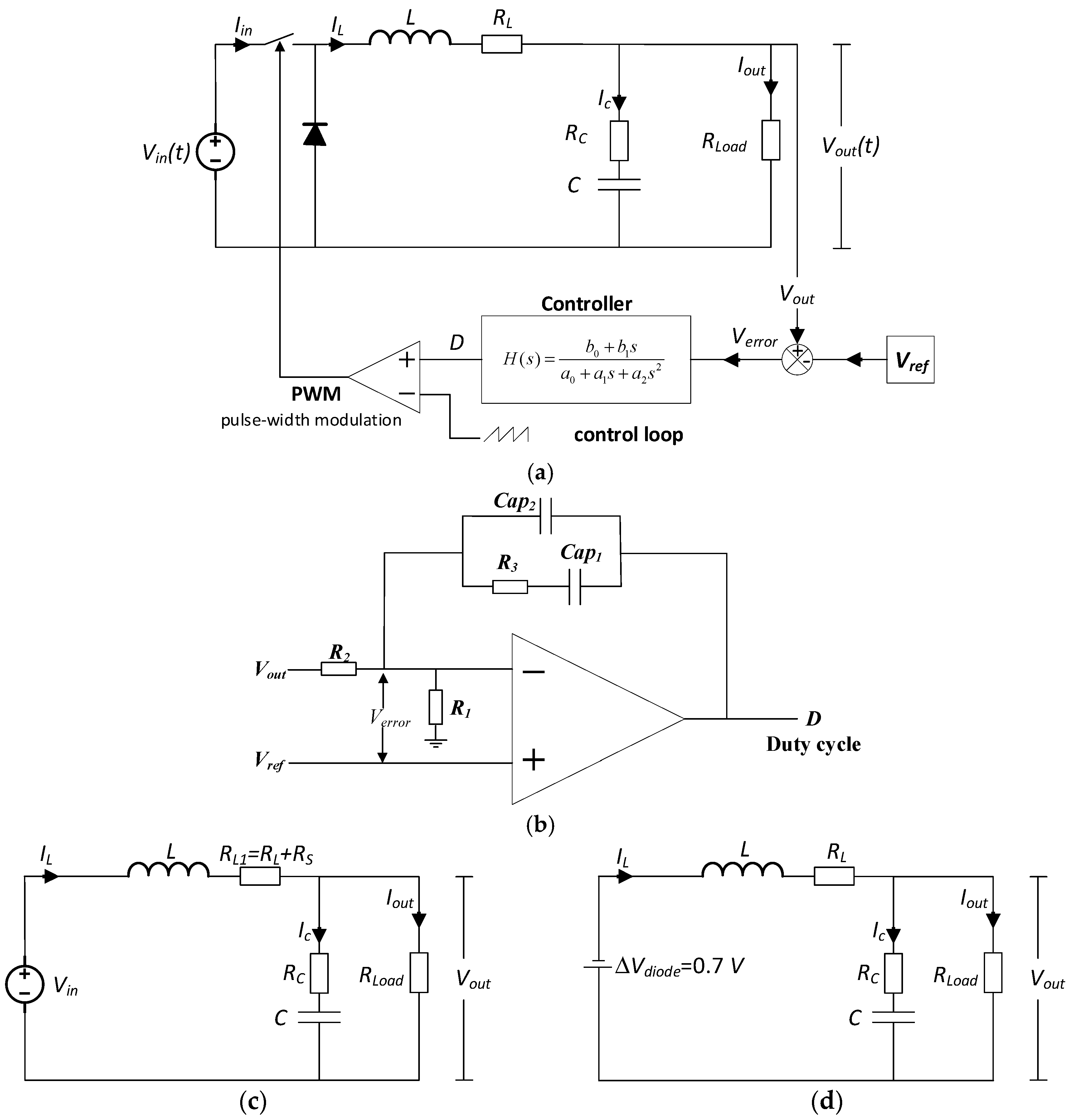
2.1. Buck Converter Parameter Identification
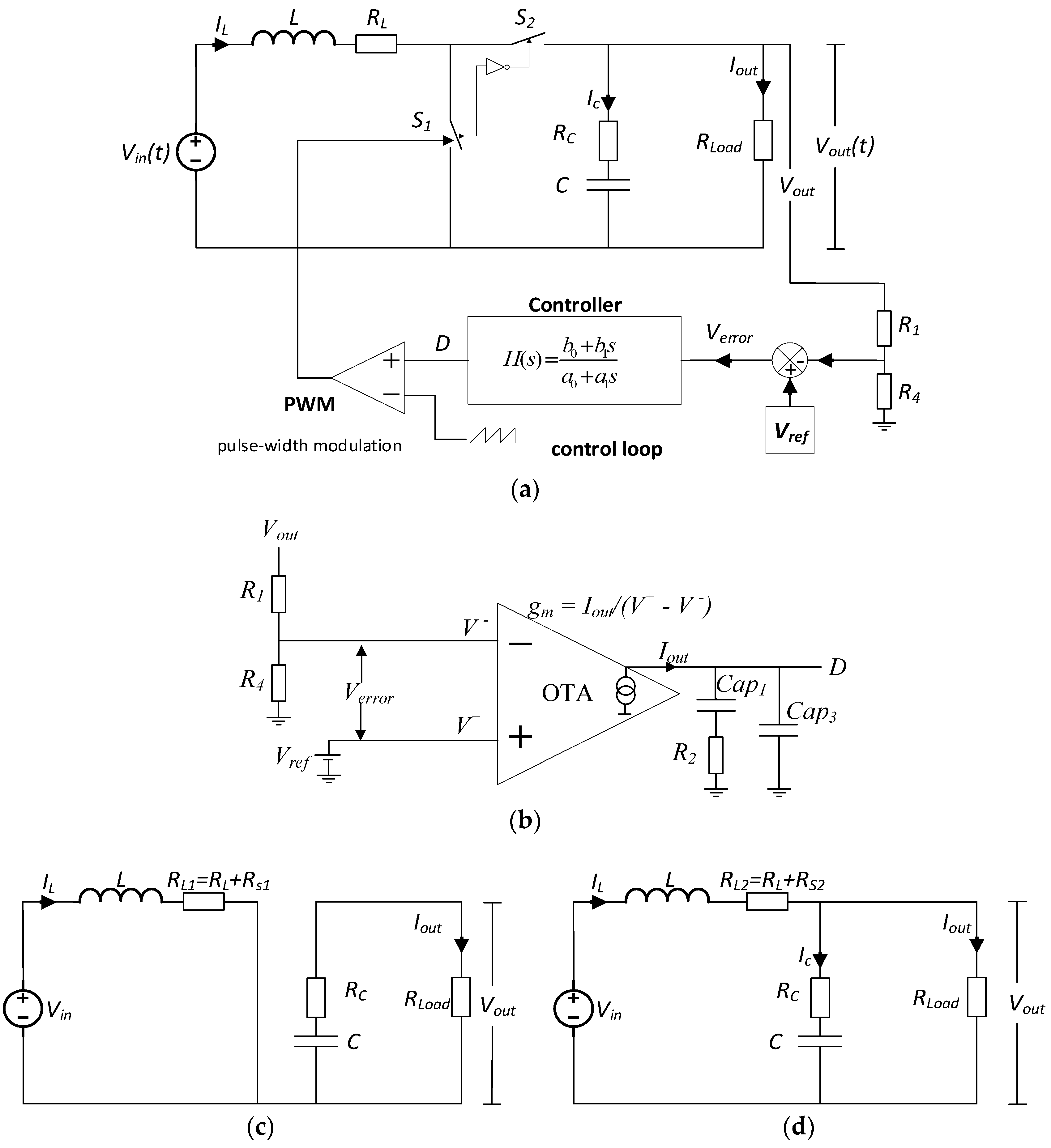
2.2. Boost Converter Parameter Identification
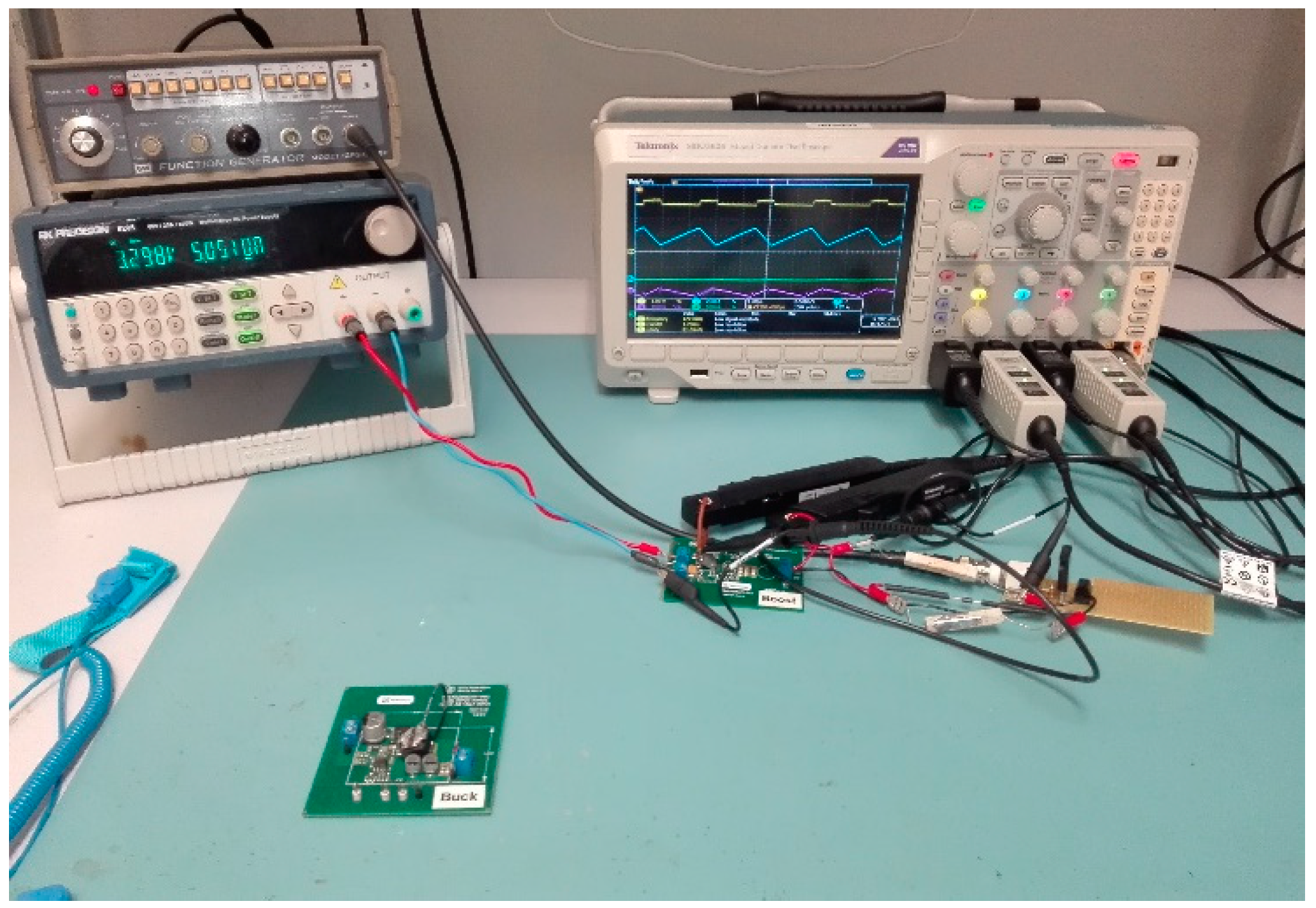
3. Experimental Results
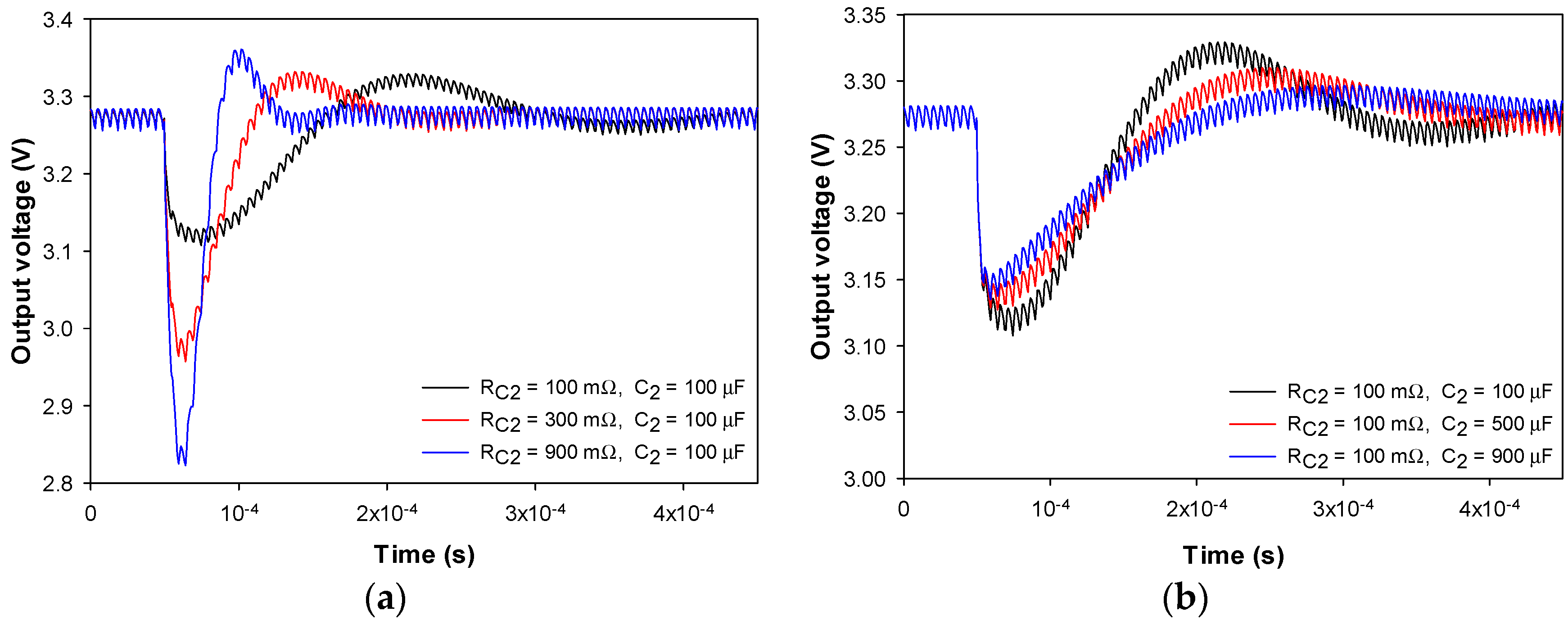
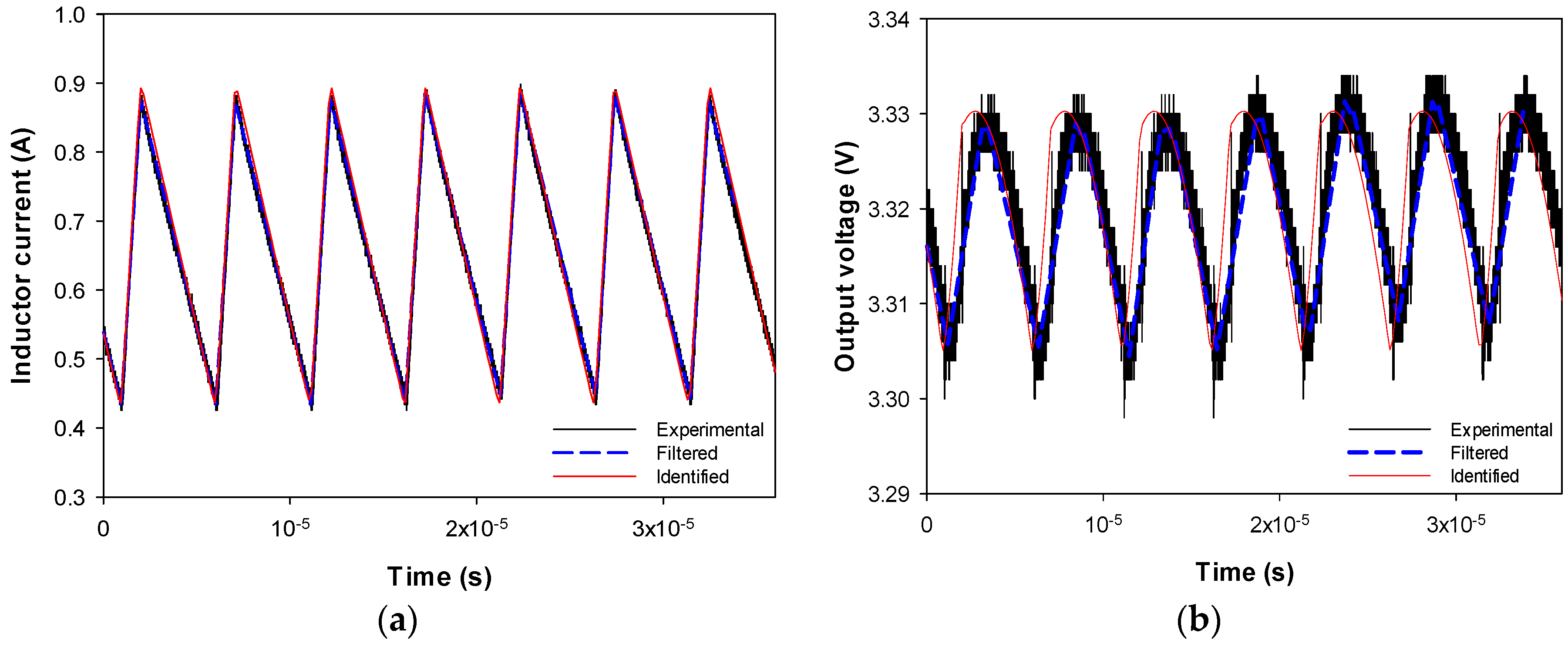
3.1. Experimental Results: Buck Converter Parameter Identification
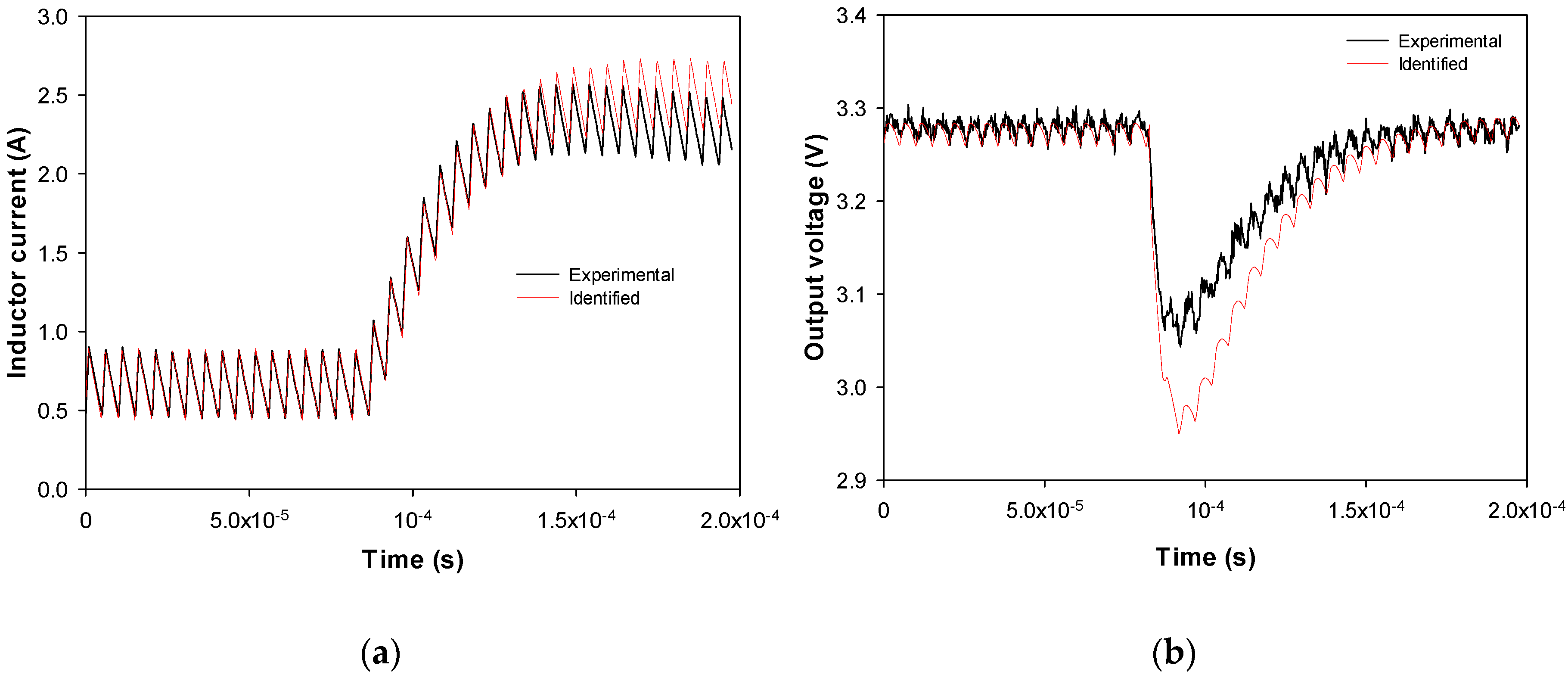
3.2. Experimental Results: Boost Converter Parameter Identification
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nguyen, V.; Huynh, H.; Kim, S.; Song, H.; Nguyen, V.H.; Huynh, H.A.; Kim, S.; Song, H. Active EMI Reduction Using Chaotic Modulation in a Buck Converter with Relaxed Output LC Filter. Electronics 2018, 7, 254. [Google Scholar] [CrossRef]
- Ahmeid, M.; Armstrong, M.; Gadoue, S.; Algreer, M.; Missailidis, P.; Al-Greer, M.; Missailidis, P. Real-Time Parameter Estimation of DC–DC Converters Using a Self-Tuned Kalman Filter. IEEE Trans. Power Electron. 2017, 32, 5666–5674. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, X.; Sun, C.; He, Z.; Zhang, Y.; Li, X.; Sun, C.; He, Z. Improved Step Load Response of a Dual-Active-Bridge DC–DC Converter. Electronics 2018, 7, 185. [Google Scholar] [CrossRef]
- Qian, S.; Ren, L.; Gong, C.; Wang, H. A unified feature parameter extraction strategy based on system identification for the Buck converter with linear or nonlinear loads. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 388–393. [Google Scholar]
- Ye, C.; Feng, S.; Xu, P.; Liu, J. Transmission Line Parameter Identification Considering Non-Synchronized Time of Fault Recording Information. In Proceedings of the 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 25–27 May 2018; pp. 1749–1753. [Google Scholar]
- Chen, W.; Gong, Q.; Wang, T.; Yin, C.; Yao, J. A real-parameter genetic algorithm application in parameters identification for synchronous generator. In Proceedings of the 2009 IEEE International Conference on Intelligent Computing and Intelligent Systems, Shanghai, China, 20–22 November 2009; pp. 762–766. [Google Scholar]
- Jiya, I.; Gurusinghe, N.; Gouws, R.; Jiya, I.N.; Gurusinghe, N.; Gouws, R. Electrical Circuit Modelling of Double Layer Capacitors for Power Electronics and Energy Storage Applications: A Review. Electronics 2018, 7, 268. [Google Scholar] [CrossRef]
- Buiatti, G.M.; Amaral, A.M.R.; Cardoso, A.J.C. ESR Estimation Method for DC/DC Converters Through Simplified Regression Models. In Proceedings of the 2007 IEEE Industry Applications Annual Meeting, New Orleans, LA, USA, 23–27 September 2007; pp. 2289–2294. [Google Scholar]
- Oliver, J.A.; Prieto, R.; Romero, V.; Cobos, J.A. Behavioural Modelling of DC-DC Converters for Large-Signal Simulation of Distributed Power Systems. In Proceedings of the Twenty-First Annual IEEE Applied Power Electronics Conference and Exposition, APEC’06, Dallas, TX, USA, 19–23 March 2006; pp. 1204–1209. [Google Scholar]
- Algreer, M.M.F.S. Microprocessor Based Signal Processing Techniques for System Identification and Adaptive Control of DC-DC Converters. Ph.D. Thesis, Newcastle University, Newcastle, UK, 2012. [Google Scholar]
- Munster, D. Parameter Identification: A Comparison of Methods. 2009, pp. 4–7. Available online: http://www.math.vt.edu/ugresearch/munster_drayton.pdf (accessed on 28 September 2018).
- Nelles, O. Nonlinear System Identification. From Classical Approaches to Neural Networks and Fuzzy Models; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Petrone, R.; Zheng, Z.; Hissel, D.; Péra, M.C.; Pianese, C.; Sorrentino, M.; Becherif, M.; Yousfi-Steiner, N. A review on model-based diagnosis methodologies for PEMFCs. Int. J. Hydrog. Energy 2013, 38, 7077–7091. [Google Scholar] [CrossRef]
- Valdivia, V. Behavioral Modeling and Identification of Power Electronics Converters and Subsystems Based on Transient Response. Ph.D. Thesis, Universidad Carlos III de Madrid, Madrid, Spain, 2013. [Google Scholar]
- Wehbe, Y.; Fan, L.; Miao, Z. Least squares based estimation of synchronous generator states and parameters with phasor measurement units. In Proceedings of the North American Power Symposium (NAPS 2012), Champaign, IL, USA, 9–11 September 2012. [Google Scholar]
- Gietler, H.; Unterrieder, C.; Berger, A.; Priewasser, R.; Lunglmayr, M. Low-complexity, high frequency parametric system identification method for switched-mode power converters. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 2004–2009. [Google Scholar]
- Linares-Flores, J.; Hernandez Mendez, A.; Garcia-Rodriguez, C.; Sira-Ramirez, H. Robust Nonlinear Adaptive Control of a “Boost” Converter via Algebraic Parameter Identification. IEEE Trans. Ind. Electron. 2014, 61, 4105–4114. [Google Scholar] [CrossRef]
- Chen, C.; Li, L.; Zhang, Q.; Tong, Q.; Liu, K.; Lyu, D.; Min, R. Online Inductor Parameters Identification by Small-Signal Injection for Sensorless Predictive Current Controlled Boost Converter. IEEE Trans. Ind. Inform. 2017, 13, 1554–1564. [Google Scholar] [CrossRef]
- Xu, J.; Armstrong, M.; Al-Greer, M. Parameter Estimation of DC-DC Converters Using Recursive Algorithms with Adjustable Iteration Frequency. In Proceedings of the 2018 IEEE 19th Workshop on Control and Modeling for Power Electronics (COMPEL), Padua, Italy, 25–28 June 2018; pp. 1–8. [Google Scholar]
- Ren, L.; Gong, C. Modified hybrid model of boost converters for parameter identification of passive components. IET Power Electron. 2018, 11, 764–771. [Google Scholar] [CrossRef]
- Buiatti, G.M.; Amaral, A.M.R.; Cardoso, A.J.M. An unified method for estimating the parameters of non-isolated DC/DC converters using continuous time models. In Proceedings of the 29th International Telecommunications Energy Conference (INTELEC 2007), Rome, Italy, 30 September–4 October 2007; pp. 334–341. [Google Scholar]
- Texas Instruments. Using the TPS40200. User’s Guide; Texas Instruments: Dallas, TX, USA, 2009. [Google Scholar]
- Texas Instruments. Demystifying Type II and Type III Compensators Using OpAmp and OTA for DC/DC Converters. Application Report; Texas Instruments: Dallas, TX, USA, 2014. [Google Scholar]
- Texas Instruments. TPS61089-PWR742 Evaluation Module. User’s Guide; Texas Instruments: Dallas, TX, USA, 2016. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Variable | Actual (Datasheet) | Identified |
|---|---|---|---|
| Inductance | L | 33 μH | 35.2 μH |
| Inductor resistance | RL | 60 mΩ | 55.8 mΩ |
| Switch S1 | RS | <105 mΩ | 39.1 mΩ |
| Capacitance (smaller capacitor) | C1 | 20 μF | 16.8 μF |
| ESR of output capacitor (smaller) | Rc1 | 65 mΩ | 60.9 mΩ |
| Capacitance (larger capacitor) | C2 | 440 μF | 490 μF |
| ESR of output capacitor (larger) | Rc2 | 300 mΩ | 280 mΩ |
| Equivalent ESR (large and small capacitors) | Rc,eq | 56.4 mΩ | 54.5 mΩ |
| Equivalent capacitance (large and small capacitors) | Ceq | 29.92 μF | 25.4 μF |
| a0 | 0 | −0.010 | |
| a1 | 4.73 × 10−4 | 1.38 × 10−3 | |
| a2 | 1.55 × 10−9 | 4.18 × 10−9 | |
| Transfer function coefficients of the controller | bo | 1.0 | 1 |
| b1 | 4.70 × 10-4 | 7.10 × 10−4 | |
| b2 | 0 | 1.42 × 10−12 | |
| Load resistance | RLoad | 5 Ω | 4.997 Ω |
| Parameter | Variable | Actual (Datasheet) | Identified |
|---|---|---|---|
| Inductance | L | 1.8 μH | 1.9 μH |
| Inductor resistance | RL | 12.6 mΩ | 7.5 mΩ |
| Equivalent ESR (large and small capacitors) | Rc,eq | 0.65 mΩ | 1.06 mΩ |
| Equivalent capacitance (large and small capacitors) | Ceq | 67.0 μF | 47.9 μF |
| Switch S1 | RS1 | <31 mΩ | 10.92 mΩ |
| Switch S2 | RS2 | <44 mΩ | 16.38 mΩ |
| a0 | 0.0 | 0.1 | |
| a1 | 4.7 × 10−9 | 5.0 × 10−4 | |
| Transfer function coefficients of the controller | bo | 1.0 | 1.0 |
| b1 | 8.18 × 10−5 | 6.36 × 10−5 | |
| Load resistance | RLoad | 5 Ω | 4.969 Ω |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Riba, J.-R.; Moreno-Eguilaz, M.; Bogarra, S.; Garcia, A. Parameter Identification of DC-DC Converters under Steady-State and Transient Conditions Based on White-Box Models. Electronics 2018, 7, 393. https://doi.org/10.3390/electronics7120393
Riba J-R, Moreno-Eguilaz M, Bogarra S, Garcia A. Parameter Identification of DC-DC Converters under Steady-State and Transient Conditions Based on White-Box Models. Electronics. 2018; 7(12):393. https://doi.org/10.3390/electronics7120393
Chicago/Turabian StyleRiba, Jordi-Roger, Manuel Moreno-Eguilaz, Santiago Bogarra, and Antoni Garcia. 2018. "Parameter Identification of DC-DC Converters under Steady-State and Transient Conditions Based on White-Box Models" Electronics 7, no. 12: 393. https://doi.org/10.3390/electronics7120393
APA StyleRiba, J.-R., Moreno-Eguilaz, M., Bogarra, S., & Garcia, A. (2018). Parameter Identification of DC-DC Converters under Steady-State and Transient Conditions Based on White-Box Models. Electronics, 7(12), 393. https://doi.org/10.3390/electronics7120393