A Fast Global Flight Path Planning Algorithm Based on Space Circumscription and Sparse Visibility Graph for Unmanned Aerial Vehicle



Abstract
1. Introduction
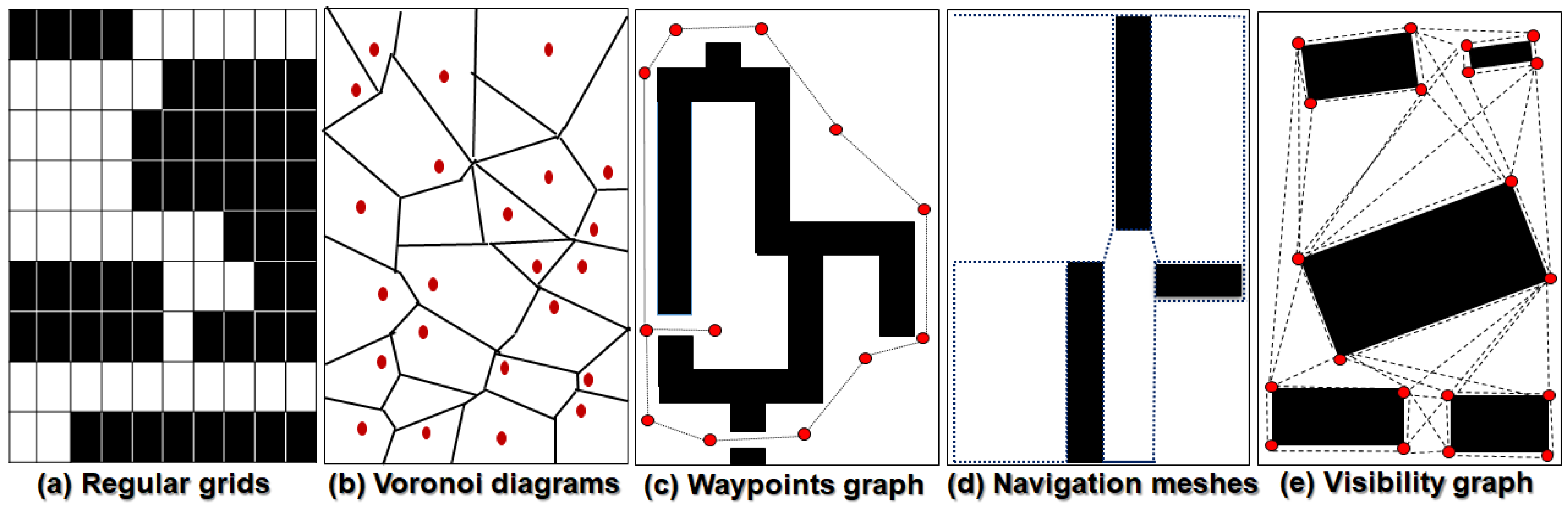
2. Background and Related Work
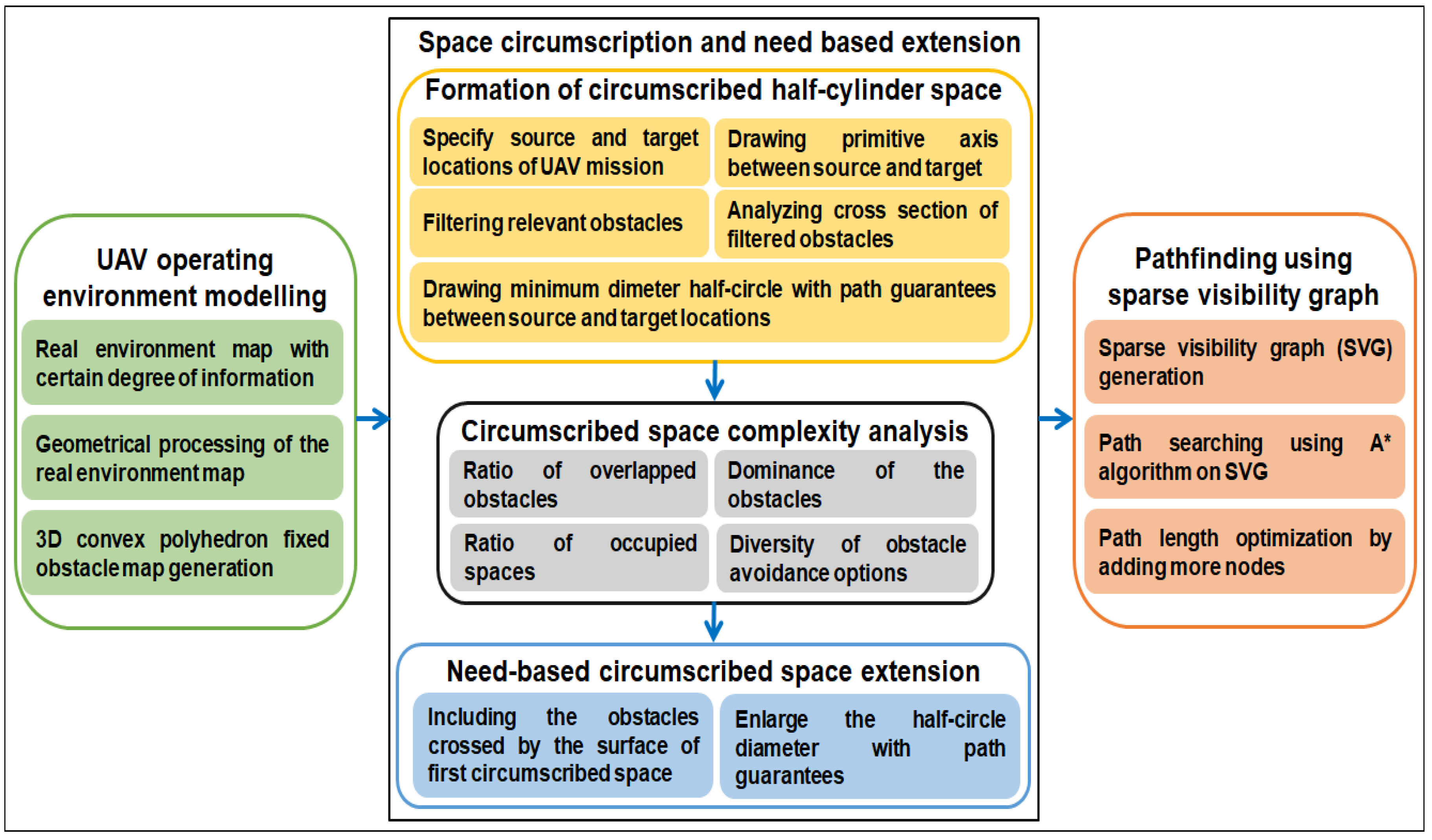
3. The Proposed Global Flight Path Planning Algorithm
3.1. Modelling of the UAV Operating Environment
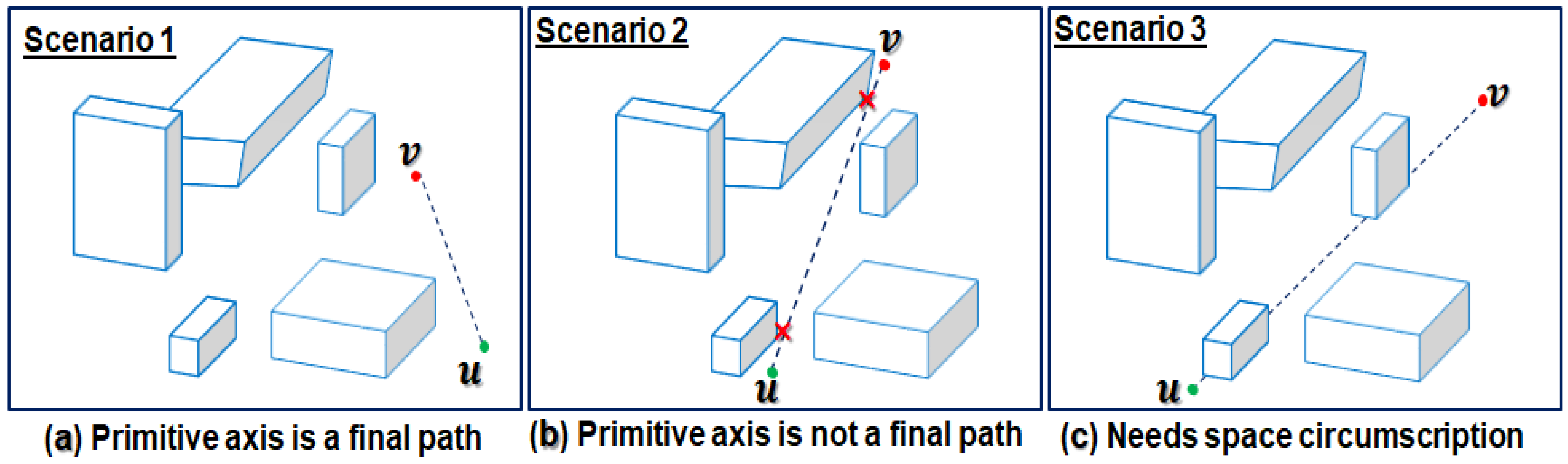
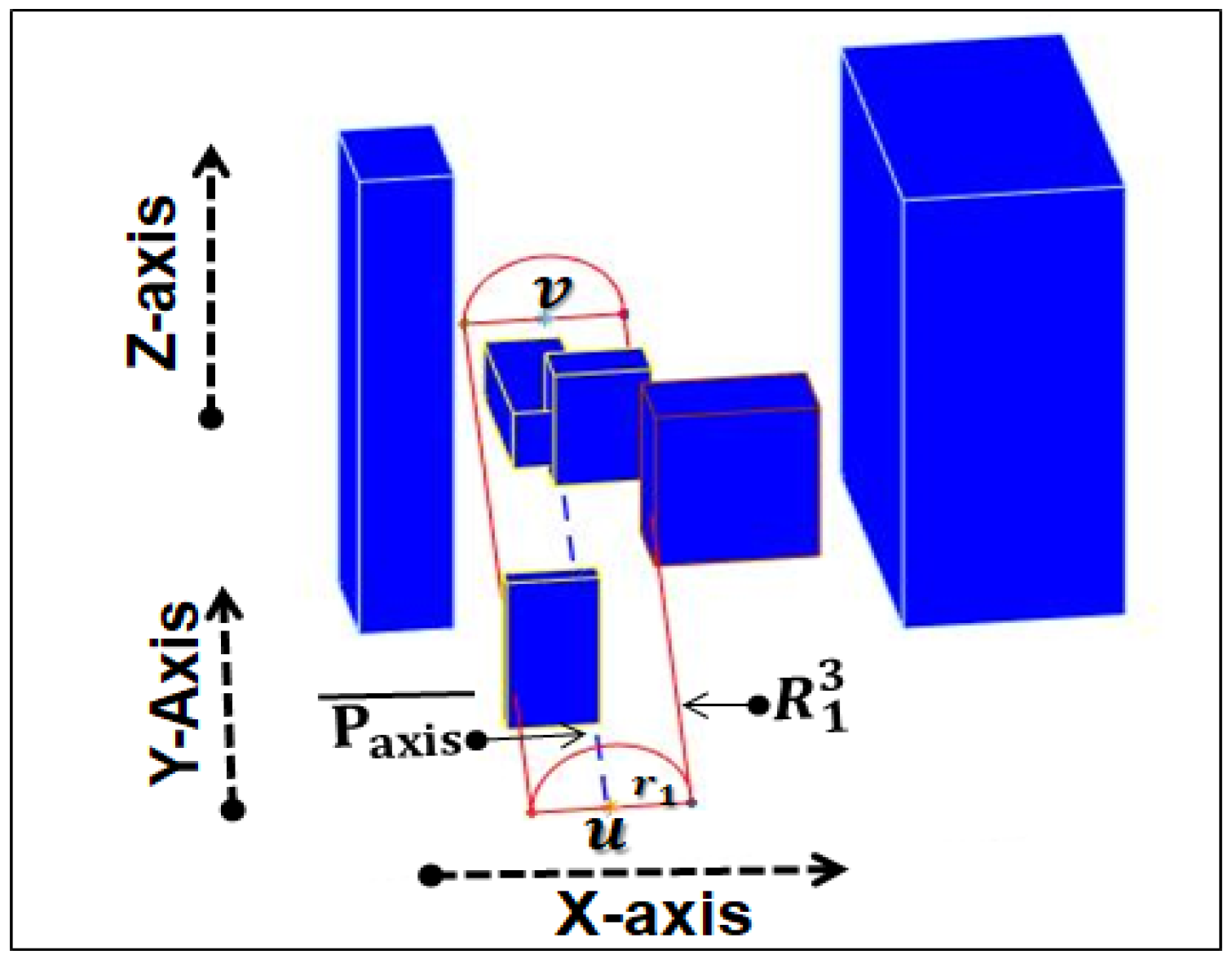
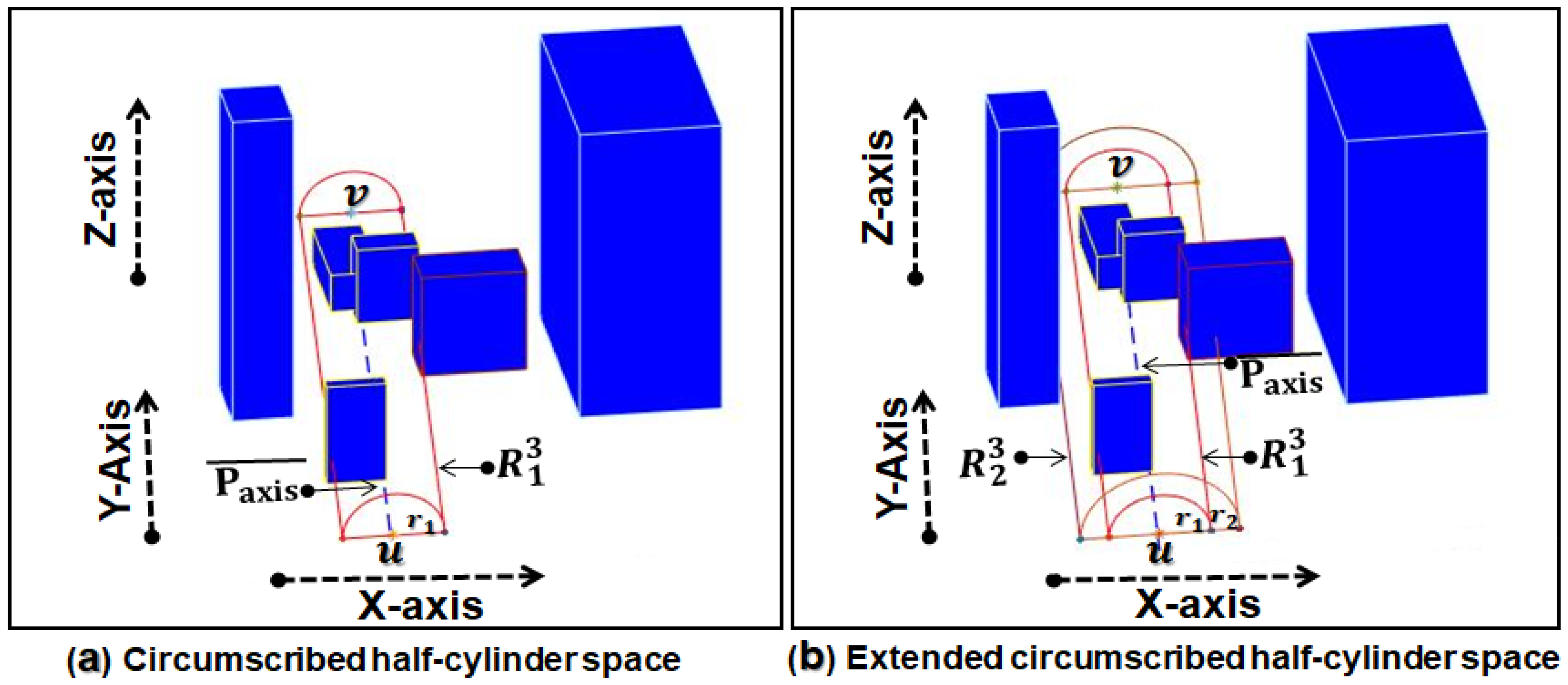
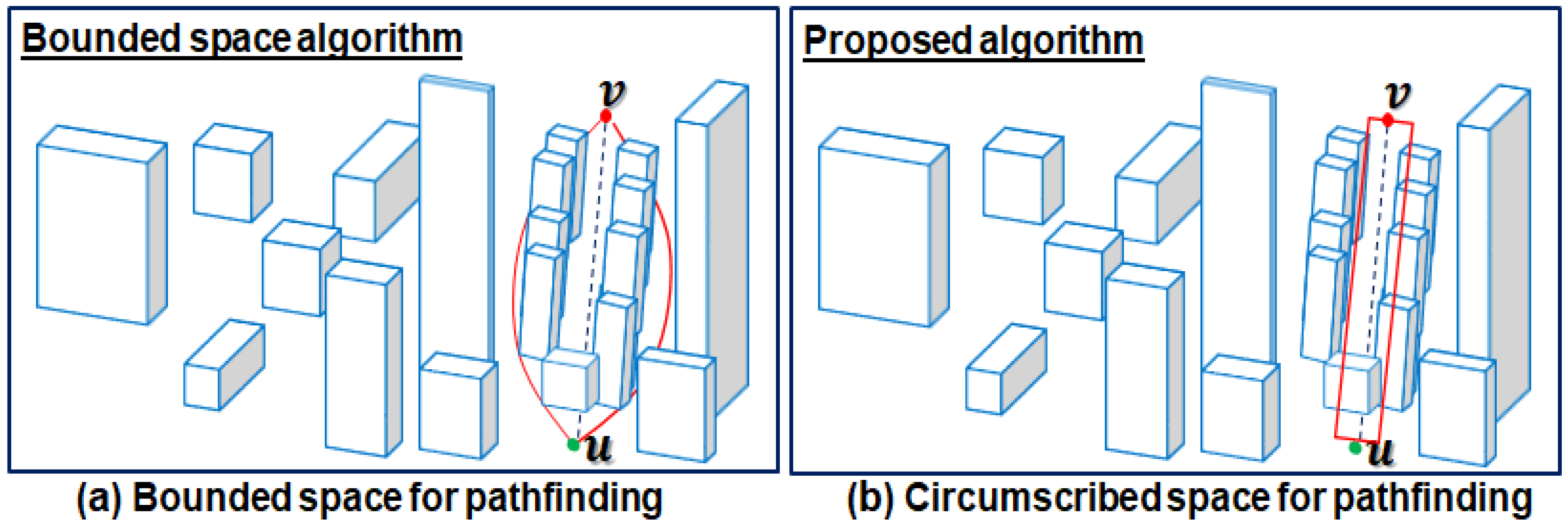
3.2. Formation of the Circumscribed Half Cylinder Space
| Algorithm 1: Filtering relevant obstacles from the map. | ||
| Input: | (1) Map M containing N number of obstacles, where | |
| (2) Source point (u) | ||
| (3) Target point (v) | ||
| Output: | Set R of the relevant obstacles | |
| Procedure: | ||
| 1 | Initialize, set R = ∅ | |
| 2 | Draw primitive axis between (u) and (v) | |
| 3 | for each , where = to ∈ N do | |
| 4 | if INTERSECTS (, ) then | |
| 5 | ||
| 6 | End if | |
| 7 | End for | |
| 8 | returnR | |
3.3. Multicriteria-Based Circumscribed Half Cylinder Space Complexity Analysis
3.3.1. Ratio of Occupied Spaces
3.3.2. Diversity of Obstacle Avoidance Options
- Calculate the proportion () of each obstacle avoidance option (e.g., , , ) category from the circumscribed space using Equation (7).where k is the total number of the obstacle avoidance options and it can be calculated using following equation.
- Sum and square the individual proportions () of each obstacle avoidance option category from the circumscribed space. The result is diversity denoted with .
3.3.3. Dominance of the Obstacles
3.3.4. Ratio of Overlapped Obstacles
3.4. Extension of the Circumscribed Half Cylinder Space
3.5. Sparse Visibility Graph Generation
3.6. Path Searching
3.7. Path Length Optimization
4. Results and Discussion
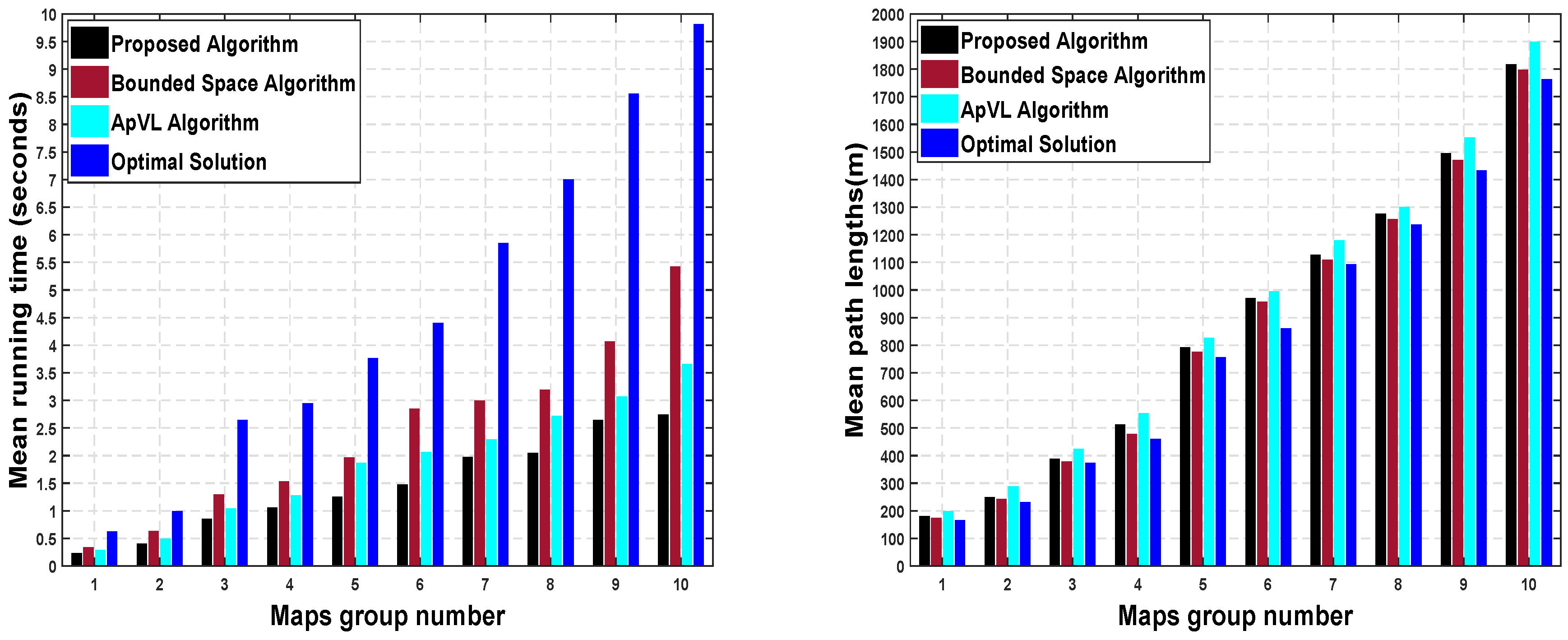
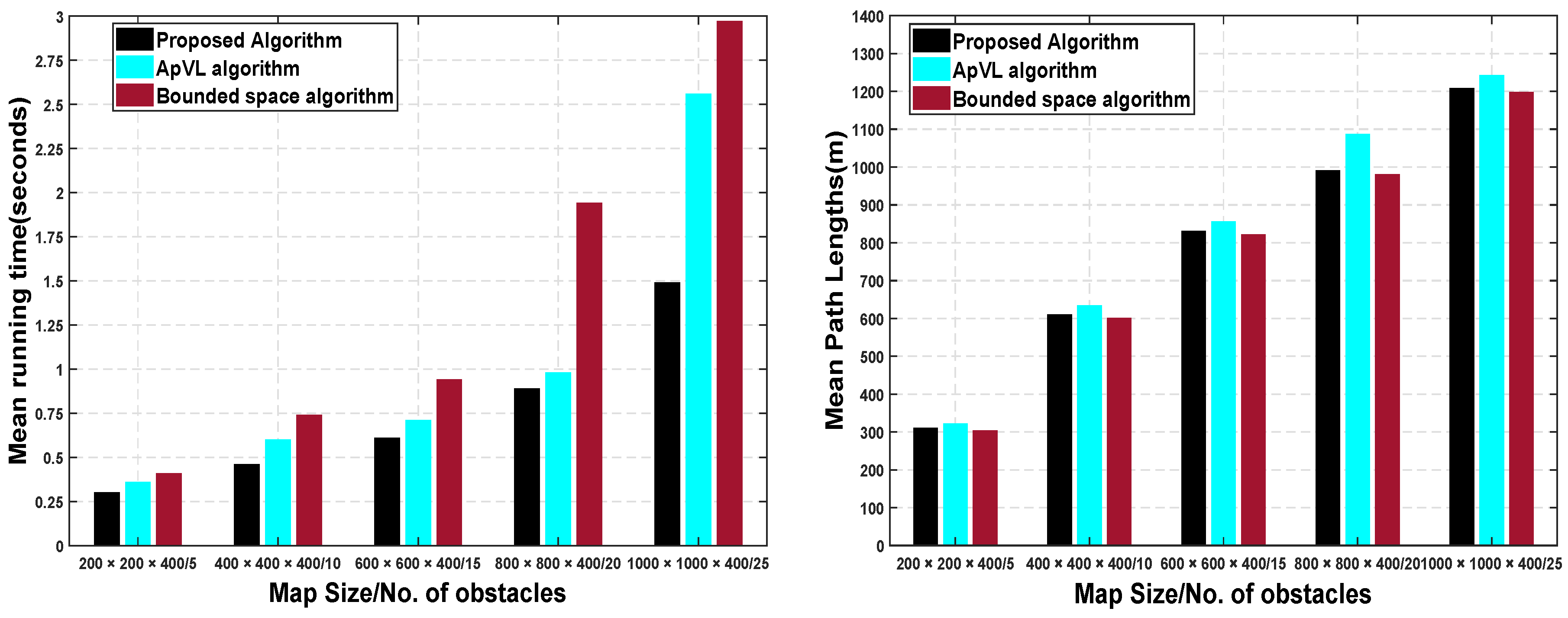
4.1. Comparison with the Visibility Graph-Based Approaches
4.2. Comparison with the Randomized Motion Planning Techniques
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Song, B.D.; Park, K.; Kim, J. Persistent UAV delivery logistics: MILP formulation and efficient heuristic. Comput. Ind. Eng. 2018, 120, 418–428. [Google Scholar] [CrossRef]
- Haidari, L.A.; Brown, S.T.; Ferguson, M.; Bancroft, E.; Spiker, M.; Wilcox, A.; Ambikapathi, R.; Sampath, V.; Connor, D.L.; Lee, B.Y. The economic and operational value of using drones to transport vaccines. Vaccine 2016, 34, 4062–4067. [Google Scholar] [CrossRef] [PubMed]
- Torresan, C.; Berton, A.; Carotenuto, F.; di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zalde, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Sarris, Z.; Atlas, S. Survey of UAV applications in civil markets. In Proceedings of the IEEE Mediterranean Conference on Control and Automation, Corfu, Greece, 20–23 June 2011; p. 11. [Google Scholar]
- Näsi, R.; Honkavaara, E.; Blomqvist, M.; Lyytikäinen-Saarenmaa, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Holopainen, M. Remote sensing of bark beetle damage in urban forests at individual tree level using a novel hyperspectral camera from UAV and aircraft. Urban For. Urban Green. 2018, 30, 72–83. [Google Scholar] [CrossRef]
- Yuan, C.; Zhang, Y.; Liu, Z. A survey on technologies for automatic forest fire monitoring, detection, and fighting using unmanned aerial vehicles and remote sensing techniques. Can. J. For. Res. 2015, 45, 783–792. [Google Scholar] [CrossRef]
- Kanistras, K.; Martins, G.; Rutherford, M.J.; Valavanis, K.P. A survey of unmanned aerial vehicles (UAVs) for traffic monitoring. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013. [Google Scholar]
- Stöcker, Cl.; Eltner, A.; Karrasch, P. Measuring gullies by synergetic application of UAV and close range photogrammetry—A case study from Andalusia, Spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the sky: Leveraging UAVs for disaster management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Liao, K.-W.; Lee, Y.-T. Detection of rust defects on steel bridge coatings via digital image recognition. Autom. Constr. 2016, 71, 294–306. [Google Scholar] [CrossRef]
- Sujit, P.B.; Sousa, J.; Pereira, F.L. UAV and AUVs coordination for ocean exploration. In Proceedings of the Oceans 2009-Europe, Bremen, Germany, 11–14 May 2009. [Google Scholar]
- Zikidis, K.C. Early Warning Against Stealth Aircraft, Missiles and Unmanned Aerial Vehicles; Surveillance in Action; Springer: Cham, Switzerland, 2018; pp. 195–216. [Google Scholar]
- Raja, P.; Pugazhenthi, S. Optimal path planning of mobile robots: A review. Int. J. Phys. Sci. 2012, 7, 1314–1320. [Google Scholar] [CrossRef]
- Nikolos, I.K.; Valavanis, K.P.; Tsourveloudis, N.C.; Kostaras, A.N. Evolutionary algorithm based offline/online path planner for UAV navigation. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2003, 33, 898–912. [Google Scholar] [CrossRef]
- Mittal, S.; Deb, K. Three-dimensional offline path planning for UAVs using multiobjective evolutionary algorithms. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007. [Google Scholar]
- Yang, X.; Sun, Ji. Solving the Path Planning Problem in Mobile Robotics with the Multi-Objective Evolutionary Algorithm. Appl. Sci. 2018, 8, 1425. [Google Scholar]
- Yang, L.; Zhang, X.; Guan, X.; Delahaye, D. Adaptive sensitivity decision based path planning algorithm for unmanned aerial vehicle with improved particle swarm optimization. Aerosp. Sci. Technol. 2016, 58, 92–102. [Google Scholar]
- Krishnan, J.; Rajeev, U.P.; Jayabalan, J.; Sheela, D.S. Optimal motion planning based on path length minimisation. Robot. Auton. Syst. 2017, 94, 245–263. [Google Scholar] [CrossRef]
- Nuske, S.; Choudhury, S.; Jain, S.; Chambers, A.; Yoder, L.; Scherer, S.; Chamberlain, L.; Cover, H.; Singh, S. Autonomous exploration and motion planning for an unmanned aerial vehicle navigating rivers. J. Field Robot. 2015, 32, 1141–1162. [Google Scholar] [CrossRef]
- Lv, T.; Zhao, C.; Bao, J. A Global path planning algorithm Based on Bidirectional SVGA. J. Robot. 2017, 2017, 8796531. [Google Scholar] [CrossRef]
- Yan, F.; Liu, Y.-S.; Xiao, J.-Z. Path planning in complex 3D environments using a probabilistic roadmap method. Int. J. Autom. Comput. 2013, 10, 525–533. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, J.; Mei, Y.; Wang, Y. Modified central force optimization (MCFO) algorithm for 3D UAV path planning. Neurocomputing 2016, 171, 878–888. [Google Scholar] [CrossRef]
- Duan, H.; Yu, Y.; Zhang, X.; Shao, S. Three-dimension path planning for UCAV using hybrid meta-heuristic ACO-DE algorithm. Simul. Model. Pract. Theory 2010, 18, 1104–1115. [Google Scholar] [CrossRef]
- Kala, R.; Shukla, A.; Tiwari, R. Robotic path planning in static environment using hierarchical multi-neuron heuristic search and probability based fitness. Neurocomputing 2011, 74, 2314–2335. [Google Scholar] [CrossRef]
- Nikolos, I.K.; Zografos, E.S.; Brintaki, A.N. UAV path planning using evolutionary algorithms. In Innovations in Intelligent Machines-1; Springer: Berlin/Heidelberg, Germany, 2007; pp. 77–111. [Google Scholar]
- Wang, Y.; Wei, T.; Qu, X. Study of multi-objective fuzzy optimization for path planning. Chin. J. Aeronaut. 2012, 25, 51–56. [Google Scholar] [CrossRef]
- Niu, H.; Lu, Y.; Savvaris, A.; Tsourdos, A. An energy-efficient path planning algorithm for unmanned surface vehicles. Ocean Eng. 2018, 161, 308–321. [Google Scholar] [CrossRef]
- Hwang, J.Y.; Kim, J.S.; Lim, S.S.; Park, K.H. A fast path planning by path graph optimization. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2003, 33, 121–129. [Google Scholar] [CrossRef]
- Meng, B.; Gao, X. UAV path planning based on bidirectional sparse A* search algorithm. In Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation, Changsha, China, 11–12 May 2010. [Google Scholar]
- Chen, G.; Shen, D.; Cruz, J.; Kwan, C.; Riddle, S.; Cox, S.; Matthews, C. A novel cooperative path planning for multiple aerial platforms. In Proceedings of the AIAA-2005-6948, Arlington, Virginia, 26–29 September 2005. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Imai, T.; Kishimoto, A. A novel technique for avoiding plateaus of greedy best-first search in satisficing planning. In Proceedings of the Fourth Annual Symposium on Combinatorial Search, Barcelona, Spain, 15–16 July 2011. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Chen, X.; Qi, F.; Wei, L. A new shortest path algorithm based on heuristic strategy. In Proceedings of the Sixth World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; Volume 1, pp. 2531–2536. [Google Scholar]
- Nash, A.; Daniel, K.; Koenig, S.; Felner, A. Theta*: Any-Angle Path Planning on Grids. In Proceedings of the AAAI Conference on Artificial Intelligence, Vancouver, BC, Canada, 22–26 July 2007; pp. 1177–1183. [Google Scholar]
- Korf, R.E. Depth-first iterative-deepening: An optimal admissible tree search. Artif. Intell. 1985, 27, 97–109. [Google Scholar] [CrossRef]
- Koenig, S.; Likhachev, M. Fast replanning for navigation in unknown terrain. IEEE Trans. Robot. 2005, 21, 354–363. [Google Scholar] [CrossRef]
- Nash, A.; Koenig, S.; Tovey, C. Lazy theta*: Any-angle path planning and path length analysis in 3D. In Proceedings of the Third Annual Symposium on Combinatorial Search, Atlanta, GA, USA, 8–10 July 2010. [Google Scholar]
- Reyes, N.H.; Barczak, A.L.C.; Susnjak, T.; Jordan, A. Fast and Smooth Replanning for Navigation in Partially Unknown Terrain: The Hybrid Fuzzy-D* lite Algorithm. In Robot Intelligence Technology and Applications 4; Springer International Publishing: Basel, Switzerland, 2017; pp. 31–41. [Google Scholar]
- Cabreira, T.M.; di Franco, C.; Ferreira, P.R.; Butta, G.C. Energy-Aware Spiral Coverage Path Planning for UAV Photogrammetric Applications. IEEE Robot. Autom. Lett. 2018, 3, 3662–3668. [Google Scholar] [CrossRef]
- Algfoor, Z.A.; Sunar, M.S.; Kolivand, H. A comprehensive study on pathfinding techniques for robotics and video games. Int. J. Comput. Games Technol. 2015, 2015, 736138. [Google Scholar] [CrossRef]
- Botea, A.; Müller, M.; Schaeffer, J. Near optimal hierarchical path-finding. J. Game Dev. 2004, 1, 7–28. [Google Scholar]
- Sturtevant, N.; Buro, M. Partial pathfinding using map abstraction and refinement. In Proceedings of the 20th national conference on Artificial intelligence, Pittsburgh, Pennsylvania, 9–13 July 2005; Volume 5, pp. 1392–1397. [Google Scholar]
- Bulitko, V.; Sturtevant, N.; Lu, J.; Yau, T. Graph abstraction in real-time heuristic search. J. Artif. Intell. Res. 2007, 30, 51–100. [Google Scholar] [CrossRef]
- Harabor, D.; Botea, A. Breaking Path Symmetries on 4-Connected Grid Maps. In Proceedings of the Association for the Advancement of Artificial Intelligence, Stanford, CA, USA, 11–13 October 2010. [Google Scholar]
- Harabor, D.D.; Grastien, A. Online Graph Pruning for Pathfinding on Grid Maps. In Proceedings of the Twenty-Fifth Conference on Artificial Intelligence, San Francisco, CA, USA, 7–11 August 2011. [Google Scholar]
- Aversa, D.; Sardina, S.; Vassos, S. Path planning with inventory-driven jump-point-search. In Proceedings of the Conference on Artificial Intelligence and Interactive Digital Entertainment (AIIDE), Santa Cruz, CA, USA, 14–18 November 2015. [Google Scholar]
- Jia, J.; Pan, J.; Xu, H.; Wang, C.; Meng, Z. An Improved JPS Algorithm in Symmetric Graph. In Proceedings of the 2015 Third International Conference on Robot, Vision and Signal Processing (RVSP), Kaohsiung, Taiwan, 18–20 November 2015; pp. 208–211. [Google Scholar]
- Harabor, D.D.; Grastien, A. The JPS Pathfinding System. In Proceedings of the Fifth Annual Symposium on Combinatorial Search, Niagara Falls, ON, Canada, 19–21 July 2012. [Google Scholar]
- Harabor, D. Graph pruning and symmetry breaking on grid maps. In Proceedings of the International Joint Conference on Artificial Intelligence, Barcelona, Spain, 16–22 July 2011; Volume 22, p. 2816. [Google Scholar]
- Nussbaum, D.; Yörükçü, A. Moving target search with subgoal graphs. In Proceedings of the Eighth Annual Symposium on Combinatorial Search, Ein Gedi, Israel, 11–13 June 2015. [Google Scholar]
- Botea, A.; Baier, J.A.; Harabor, D.; Hernández, C. Moving Target Search with Compressed Path Databases. In Proceedings of the Twenty-Third International Conference on Automated Planning and Scheduling, Rome, Italy, 10–14 June 2013. [Google Scholar]
- Strasser, B.; Botea, A.; Harabor, D. Compressing optimal paths with run length encoding. J. Artif. Intell. Res. 2015, 54, 593–629. [Google Scholar] [CrossRef]
- Sturtevant, N.R.; Felner, A.; Barer, M.; Schaeffer, J.; Burch, N. Memory-Based Heuristics for Explicit State Spaces. In Proceedings of the Twenty-First International Joint Conference, Pasadena, CA, USA, 14–17 July 2009; pp. 609–614. [Google Scholar]
- Pochter, N.; Zohar, A.; Rosenschein, J.S.; Felner, A. Search space reduction using swamp hierarchies. In Proceedings of the Third Annual Symposium on Combinatorial Search, Atlanta, GA, USA, 8–10 August 2010. [Google Scholar]
- Gonzalez, J.P.; Dornbush, A.; Likhachev, M. Using state dominance for path planning in dynamic environments with moving obstacles. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- Amador, G.P.; Gomes, A.J.P. xTrek: An Influence-Aware Technique for Dijkstra’s and A Pathfinders. Int. J. Comput. Games Technol. 2018, 2018, 5184605. [Google Scholar] [CrossRef]
- Ninomiya, K.; Kapadia, M.; Shoulson, A.; Garcia, F.; Badler, N. Planning approaches to constraint-aware navigation in dynamic environments. Comput. Anim.Virtual Worlds 2015, 26, 119–139. [Google Scholar] [CrossRef]
- Liang, X.; Meng, G.; Xu, Y.; Luo, H. A geometrical path planning method for unmanned aerial vehicle in 2D/3D complex environment. Intell. Serv. Robot. 2018, 11, 301–312. [Google Scholar] [CrossRef]
- Omar, R.; Gu, D.-W. Visibility line based methods for UAV path planning. In Proceedings of the ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009. [Google Scholar]
- Sariff, N.; Buniyamin, N. An overview of autonomous mobile robot path planning algorithms. In Proceedings of the 4th Student Conference on Research and Development, Selangor, Malaysia, 27–28 June 2006. [Google Scholar]
- Kim, H.-G.; Yu, K.-A.; Kim, J.-T. Reducing the search space for pathfinding in navigation meshes by using visibility tests. J. Electr. Eng. Technol. 2011, 6, 867–873. [Google Scholar] [CrossRef]
- Yang, X.-S. Firefly algorithm, stochastic test functions and design optimisation. Int. J. Bio-Inspired Comput. 2010, 2, 78–84. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, H. An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning. Appl. Soft Comput. 2015, 26, 270–284. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. Ind. Inform. 2013, 9, 132–141. [Google Scholar] [CrossRef]
- Marco, D.; Maniezzo, V.; Colorni, A. Ant system: optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 1996, 26, 29–41. [Google Scholar]
- Zhang, Y.; Wang, S.; Ji, G. A comprehensive survey on particle swarm optimization algorithm and its applications. Math. Probl. Eng. 2015, 2015, 931256. [Google Scholar] [CrossRef]
- Kiran, M.S.; Hakli, H.; Gunduz, M.; Uguz, H. Artificial bee colony algorithm with variable search strategy for continuous optimization. Inf. Sci. 2015, 300, 140–157. [Google Scholar] [CrossRef]
- Xiang, X.; Yu, C.; Lapierre, L.; Zhang, J.; Zhang, Q. Survey on fuzzy-logic-based guidance and control of marine surface vehicles and underwater vehicles. Int. J. Fuzzy Syst. 2018, 20, 572–586. [Google Scholar] [CrossRef]
- Li, P.; Duan, H. Path planning of unmanned aerial vehicle based on improved gravitational search algorithm. Sci. China Technol. Sci. 2012, 55, 2712–2719. [Google Scholar] [CrossRef]
- Formato, R.A. Central force optimization: A new metaheuristic with applications in applied electromagnetics. Prog. Electromagn. Res. PIER 2007, 77, 425–491. [Google Scholar] [CrossRef]
- Meng, H.; Xin, G. UAV route planning based on the genetic simulated annealing algorithm. In Proceedings of the 2010 International Conference on Mechatronics and Automation (ICMA), Xi’an, China, 4–7 August 2010. [Google Scholar]
- Elkazzaz, F.S.; Abozied, M.A.H.; Hu, C. Hybrid RRT/DE Algorithm for High Performance UCAV Path Planning. In Proceedings of the 2017 VI International Conference on Network, Communication and Computing, Kunming, China, 8–10 December 2017. [Google Scholar]
- Yang, L.; Qi, J.; Xiao, J.; Yong, X. A literature review of UAV 3D path planning. In Proceedings of the 2014 11th World Congress on Intelligent Control and Automation (WCICA), Shenyang, China, 29 June–4 July 2014. [Google Scholar]
- Lv, Z.; Yang, L.; He, Y.; Liu, Z.; Han, Z. 3D environment modeling with height dimension reduction and path planning for UAV. In Proceedings of the 2017 9th International Conference on Modelling, Identification and Control (ICMIC), Kunming, China, 10–12 July 2017. [Google Scholar]
- Liang, H.; Zhong, W.; Chunhui, Z. Point-to-point near-optimal obstacle avoidance path for the unmanned aerial vehicle. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Lu, Y.; Huo, X.; Tsiotras, P. A beamlet-based graph structure for path planning using multiscale information. IEEE Trans. Autom. Control 2012, 57, 1166–1178. [Google Scholar]
- Chen, S.; Liu, C.W.; Huang, Z.P.; Cai, G.S. Global path planning for AUV based on sparse A* search algorithm. Torpedo Technol. 2012, 20, 271–275. [Google Scholar]
- Wang, Z.; Liu, L. Enhanced sparse A* search for UAV path planning using dubins path estimation. In Proceedings of the 2014 33rd Chinese Control Conference (CCC), Nanjing, China, 28–30 July 2014. [Google Scholar]
- Zhang, K.; Liu, P.; Kong, W.; Zou, J.; Liu, M. An improved heuristic algorithm for UCAV path planning. J. Optim. 2017, 2017, 8936164. [Google Scholar] [CrossRef]
- Hota, S.; Ghose, D. Optimal path planning for an aerial vehicle in 3D space. In Proceedings of the 2010 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010. [Google Scholar]
- Plaku, E.; Plaku, E.; Simari, P. Direct path superfacets: An intermediate representation for motion planning. IEEE Robot. Autom. Lett. 2017, 2, 350–357. [Google Scholar] [CrossRef]
- Stenning, B.E.; Barfoot, T.D. Path planning with variable-fidelity terrain assessment. Robot. Auton. Syst. 2012, 60, 1135–1148. [Google Scholar] [CrossRef]
- Frontera, G.; Martín, D.J.; Besada, J.A.; Gu, D. Approximate 3D Euclidean Shortest Paths for Unmanned Aircraft in Urban Environments. J. Intell. Robot. Syst. 2017, 85, 353–368. [Google Scholar] [CrossRef]
- Ahmad, Z.; Ullah, F.; Tran, C.; Lee, S. Efficient Energy Flight path planning algorithm Using 3-D Visibility Roadmap for Small Unmanned Aerial Vehicle. Int. J. Aerosp. Eng. 2017, 2017, 2849745. [Google Scholar] [CrossRef]
- Lavalle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning; Technical Report TR: 98-11; Computer Science Department, Iowa State University: Ames, IA, USA, 1998; pp. 1–4. [Google Scholar]
- Svestka, P.; Latombe, J.C.; Kavraki, L.E.O. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar]
- Jaillet, L.; Cortés, J.; Siméon, T. Sampling-based path planning on configuration-space costmaps. IEEE Trans. Robot. 2010, 26, 635–646. [Google Scholar] [CrossRef]
- Gammell, J.D.; Srinivasa, S.; Barfoot, T. Informed RRT*: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Nieuwenhuisen, D.; Overmars, M.H. Useful cycles in probabilistic roadmap graphs. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 1. [Google Scholar]
- Kuffner, J.J.; LaValle, S.M. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 2. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Nasir, J.; Islam, F.; Malik, U.; Ayaz, Y.; Hasan, O.; Khan, M.; Muhammad, M.S. RRT*-SMART: A rapid convergence implementation of RRT. Int. J. Adv. Robot. Syst. 2013, 10, 299. [Google Scholar] [CrossRef]
- Noreen, I.; Khan, A.; Habib, Z. A comparison of RRT, RRT* and RRT*-smart path planning algorithms. Int. J. Comput. Sci. Netw. Secur. 2016, 16, 20. [Google Scholar]
- Noreen, I.; Khan, A.; Ryu, H.; Doh, N.L.; Habib, Z. Optimal path planning in cluttered environment using RRT*-AB. Intell. Serv. Robot. 2018, 11, 41–52. [Google Scholar] [CrossRef]
- Simpson, E.H. Measurement of diversity. Nature 1949, 163, 688. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group No. | Map Size/No. of Obstacles | Proposed Algorithm | ApVL Algorithm | Bounded Space Algorithm |
|---|---|---|---|---|
| (x × y × z)/(5 − 50) | Avg. Running Time (s) | Avg. Running Time (s) | Avg. Running Time (s) | |
| 1 | 100 × 100 × 300/5 | 0.91 | 1.16 | 2.67 |
| 2 | 200 × 200 × 300/10 | 4.91 | 7.39 | 12.89 |
| 3 | 300 × 300 × 300/15 | 15.06 | 20.57 | 28.21 |
| 4 | 400 × 400 × 300/20 | 36.13 | 46.56 | 57.24 |
| 5 | 500 × 500 × 300/25 | 72.56 | 93.84 | 110.64 |
| 6 | 600 × 600 × 400/30 | 96.67 | 106.17 | 136.81 |
| 7 | 700 × 700 × 400/35 | 129.63 | 132.59 | 176.93 |
| 8 | 800 × 800 × 400/40 | 151.51 | 181.49 | 207.19 |
| 9 | 900 × 900 × 400/45 | 176.31 | 195.26 | 221.33 |
| 10 | 1000 × 1000 × 400/50 | 187.22 | 204.30 | 242.49 |
| No. of Obstacles | Proposed Algorithm | ApVL Algorithm | Bounded Space Algorithm | |||
|---|---|---|---|---|---|---|
| Avg. Time (s) | Length Ratio | Avg. Time (s) | Length Ratio | Avg. Time (s) | Avg. Length (m) | |
| 10 | 0.15 | 1.02298 | 0.28 | 1.05371 | 0.63 | 482.33 |
| 20 | 0.63 | 1.01350 | 0.87 | 1.01983 | 1.97 | 1093.94 |
| 30 | 1.02 | 1.01722 | 1.30 | 1.02577 | 2.04 | 1169.02 |
| 40 | 1.10 | 1.05135 | 1.37 | 1.08586 | 3.05 | 1283.12 |
| 50 | 1.30 | 1.01384 | 2.76 | 1.03214 | 3.25 | 1639.66 |
| 60 | 1.38 | 1.01071 | 2.92 | 1.01606 | 4.57 | 1681.23 |
| 70 | 1.53 | 1.00511 | 3.03 | 1.01589 | 5.03 | 1868.77 |
| 80 | 1.87 | 1.00527 | 3.32 | 1.01577 | 5.24 | 1904.50 |
| 90 | 2.32 | 1.00659 | 4.06 | 1.01492 | 6.08 | 2004.32 |
| 100 | 2.98 | 1.00768 | 4.29 | 1.01393 | 7.30 | 2210.53 |
| Maps Group No. | RRT* Algorithm | RRT*-AB Algorithm | Proposed Algorithm | |||
|---|---|---|---|---|---|---|
| Avg. Time (s) | Avg. Length (m) | Avg. Time (s) | Avg. Length (m) | Avg. Time (s) | Avg. Length (m) | |
| 1 | 10.23 | 245.13 | 7.21 | 175.67 | 1.14 | 178.24 |
| 2 | 22.40 | 275.34 | 14.44 | 244.19 | 5.31 | 248.27 |
| 3 | 31.94 | 423.12 | 28.06 | 389.23 | 15.91 | 381.77 |
| 4 | 61.53 | 546.43 | 46.66 | 524.32 | 37.18 | 504.69 |
| 5 | 99.49 | 839.22 | 89.19 | 828.45 | 73.82 | 791.34 |
| 6 | 182.62 | 1039.56 | 161.61 | 997.67 | 98.14 | 969.17 |
| 7 | 234.47 | 1240.96 | 202.18 | 1159.86 | 131.60 | 1126.34 |
| 8 | 286.58 | 1465.25 | 213.55 | 1308.12 | 153.55 | 1276.29 |
| 9 | 321.81 | 1542.65 | 267.12 | 1509.87 | 178.95 | 1491.89 |
| 10 | 415.45 | 1992.58 | 287.21 | 1896.18 | 189.97 | 1826.24 |
| Algorithms | Evaluation Criteria | Maps Group No. | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| RRT* | Avg. tree nodes Avg. path nodes | 300 17 | 500 21 | 650 28 | 825 31 | 1045 39 | 1235 35 | 1479 41 | 1979 37 | 2129 43 | 2521 44 |
| RRT*-AB | Avg. tree nodes Avg. path nodes | 221 13 | 351 16 | 423 14 | 549 19 | 661 21 | 835 24 | 1056 29 | 1461 29 | 1598 34 | 1932 40 |
| Proposed | Avg. graph nodes Avg. path nodes | 112 5 | 198 8 | 276 9 | 342 13 | 467 15 | 681 17 | 799 21 | 981 24 | 1292 27 | 1538 31 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Majeed, A.; Lee, S. A Fast Global Flight Path Planning Algorithm Based on Space Circumscription and Sparse Visibility Graph for Unmanned Aerial Vehicle. Electronics 2018, 7, 375. https://doi.org/10.3390/electronics7120375
Majeed A, Lee S. A Fast Global Flight Path Planning Algorithm Based on Space Circumscription and Sparse Visibility Graph for Unmanned Aerial Vehicle. Electronics. 2018; 7(12):375. https://doi.org/10.3390/electronics7120375
Chicago/Turabian StyleMajeed, Abdul, and Sungchang Lee. 2018. "A Fast Global Flight Path Planning Algorithm Based on Space Circumscription and Sparse Visibility Graph for Unmanned Aerial Vehicle" Electronics 7, no. 12: 375. https://doi.org/10.3390/electronics7120375
APA StyleMajeed, A., & Lee, S. (2018). A Fast Global Flight Path Planning Algorithm Based on Space Circumscription and Sparse Visibility Graph for Unmanned Aerial Vehicle. Electronics, 7(12), 375. https://doi.org/10.3390/electronics7120375