1. Introduction
With the increasing pace of technology and robotic developments, our lifestyle has become more dependent on service robots, especially when it comes to the cleaning and maintenance of households. It is estimated that cleaning robots could reach a market value of USD 4.34 billion in 2023, of which floor-cleaning robots will hold a larger share [
1]. The need for such applications has become imperative, as cleaning is considered by some as a dull, tedious, and mundane process. A key criterion while developing a cleaning robot is its capacity to demonstrate autonomous operation abilities. Having a consciousness of nearby obstacles is crucial while traversing autonomously in uncertain environments with complex settings. The overall efficacy of the robot is usually determined by the accuracy of the sensor module [
2], the flexibility of control systems [
3], and the intelligence of area coverage path planning strategies [
4]. Among these autonomous aspects, the path planning strategy adopted determines whether the robot is capable of achieving effective area coverage while avoiding obstacles in a given environment. During the path planning phase, the shortest accessible route for smooth manoeuvring in the environment while preserving energy is strongly desired to amplify the performance of service robots. Coverage path planning is an interesting field of study for robotic scientists with numerous studies available in the research literature. Recently, various complete coverage-based path planning algorithms have been developed and implemented on robots to accomplish various objectives.
In a complete coverage path planning setup, grid-based coverage methods have been commonly used to create a workspace environment. In this type of setup, a captured map is treated as multiple areas, and each area contains a value that describes the target environment, stating whether an obstacle is present or whether there is an unoccupied space. There are numerous algorithms that realize a grid-based area coverage approach, such as hexagonal grid decomposition [
5], wavefront algorithm [
6], the neural network-based area coverage algorithm in Reference [
3], and the spanning tree method [
7]. A graph-based area coverage path planning approach was presented by Xu et al. in [
8], where the mapped region is considered as a graph, and robot motion planning is applied to reach every point in the graph. Numerous 3D area coverage methods for service robots have been proposed and demonstrated in recent years. Jin et al. proposed a 3D area coverage technique for agricultural purposes [
9]. Cheng et al. [
10] presented the application of 3D area coverage for urban structure inspection. E Galceran et al. [
11] presented a bathymetric 3D map to inspect ocean floors.
When it comes to area coverage by obstacle avoidance and non-overlapping of the covered region, cellular decomposition is the most preferred and frequently used path planning method [
12,
13,
14]. In this method, the grid-based workspace environment is broken down into small uniformly-shaped cells of the same size with motion planning applied that helps to achieve area coverage. Past studies have developed different strategies to decompose the given area, like the trapezoidal decomposition method [
15,
16], boustrophedon decomposition [
17], and Morse-based cellular decomposition [
18]. Wong et al. [
19] presented a topological area coverage method that uses the cloud point of landmarks as nodes to cover the area. Butler et al. [
20] proposed an area coverage method based on sensors, where the sensed data are used to generate paths that allow the robot to navigate by achieving maximum area coverage. In [
15], Timo et al. proposed a simple path planning method in agricultural applications using a trapezoidal decomposition method.
Among all coverage path planning techniques, the commonly used motion planning algorithms include spiral motion and boustrophedon motion (i.e., back and forth). Lie Tang et al. [
9] propose a decomposition method where simple motion (e.g., zigzag) patterns are required to sweep and cover the whole cellular regions in order to cover the farming field using boustrophedon paths. Hameed et al. [
21] utilized a boustrophedon path and presented a genetic algorithm for an area coverage path planning technique. In relation to spiral motion, Gabriel et al. used spiral motion in a cellular decomposition coverage technique [
22]. In another work, a more energy- and time-efficient online coverage path planning technique is presented in [
23], where they adopt a high-resolution grid map representation and utilize spiral path motion to perform efficient coverage. In works related to backtracking spiral motion, E. Gonzalez et al. utilized backtracking spiral motion in a cellular decomposition area coverage method [
24]. Additionally, in order to consider the obstacles inside the grid space, they proposed an improvised spiral algorithm [
25]. Generic reward-based algorithms are proposed in [
26], which focused on autonomous shortest path planning while avoiding obstacles. Even though many studies have been done demonstrating the advantages of different motion techniques with respect to the context of coverage path planning, none of them have been applied to robots that have a reconfigurable capability. In particular, the hinged tetro (hTetro) robot requires a unique motion planning algorithm in order to achieve better performance. The research interest in reconfigurable robots has increased over the past two decades thanks to the evolution in electronic devices and information technologies. Reconfigurable robots are generally classified into inter-reconfigurable, intra-reconfigurable, and nested reconfigurable robots. In intra-reconfigurable robots, an individual robot changes its morphology by reconfiguration on its own. Scorpio [
27], a bio-inspired robot, is an example where the robot has the capability of switching between rolling, wall climbing, and crawling forms. Another example of this is Robomods [
28], a reconfigurable under-actuated legged robot which has the capability of generating distinct walking patterns. Inter-multiple reconfiguration robots come together to assemble and disassemble to form global morphologies. There are many precedencies, including CEBOT, M-TRAN, Molecube, CKBot, and ATRON. The third major category is nested reconfigurable robots where the robots have the ability to perform the functions of both inter- and intra-reconfigurable robots. hTetro (hinged tetro) [
29] is an example of this, where the robot can change its morphology on its own and can also change its global morphology by attaching and detaching with a team of other hinged tetro robots [
30]. With numerous studies that cover different aspects of reconfigurable robots, their application in the field of floor cleaning could become more meaningful. When it comes to area coverage and path planning strategies in reconfigurable robots, there are limited studies in this field. To accomplish this task, in our previous work, a novel coverage path planning strategy was proposed [
31] for the hTetro robot based on the polyomino tiling theory. The method proposed here demonstrates the capability of the hTetro robot to generate a global tileset to cover the area where the robot is deployed. While assuming suitable morphology on each tile piece during navigation, the hTetro robot achieved maximum area coverage. In our previous works, the hTetro robot was controlled by a human operator during the process of area coverage where the robot changes its morphology at each tile piece without the implementation of any motion planning strategies.
In this paper, we investigate the crucial requirements of autonomous complete area coverage by understanding the generation of the tileset according to tiling theory [
32], its applications in gaming [
33], and computer graphics [
34]. Then, the proposed complete path planning framework is derived from the analytical tiling methodology through the logical process into systems that are demonstrable on the real Tetris-mimicked reconfigurable floor cleaning robot. In this framework, after generating the tileset, a novel technique called tiling-based local motion planner for the considered robot platform is the core technology. Specifically, the proposed planner can autonomously create an optimal navigation route on the generated tileset with the objective of covering the unified area using the least energy. The order of the navigation sequence is modeled with respect to robot kinematic design and optimized by the generic algorithm of the traveling salesman problem (TSP) [
35,
36], which is well-known for finding the shortest route to connect predefined locations. Moreover, this paper concludes with experimental results that validate the efficacy of the approach through a systematically benchmarked performance evaluation compared with other conventional motion planning techniques (i.e., spiral and boustrophedon, greedy search) used in coverage path planning concerning total traveled distance and recovered areas. Based on the dynamics model and the inverse kinematics of robot configuration, the represented complete path planning framework with the proposed motion planner technique in this paper for the new class of reconfigurable robots has the capability of autonomously producing a global tileset, determining correlated local trajectories that are feasible, and generating appropriate motion signals to the motors.
2. Tiling-Based Complete Path Planing Framework for hTetro
The robot navigation and area coverage are directly proportional to its energy consumption. Thus, the desired algorithm satisfying the two criteria: firstly, maximum area coverage, and secondly minimum energy consumption, must be simultaneously applied in hTetro.
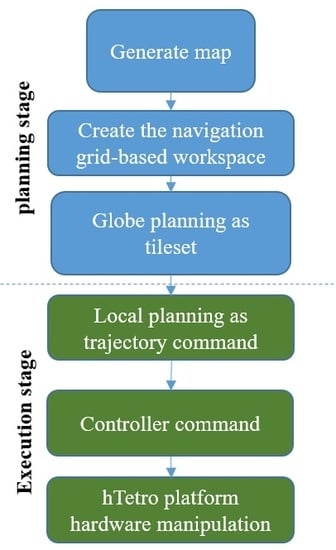
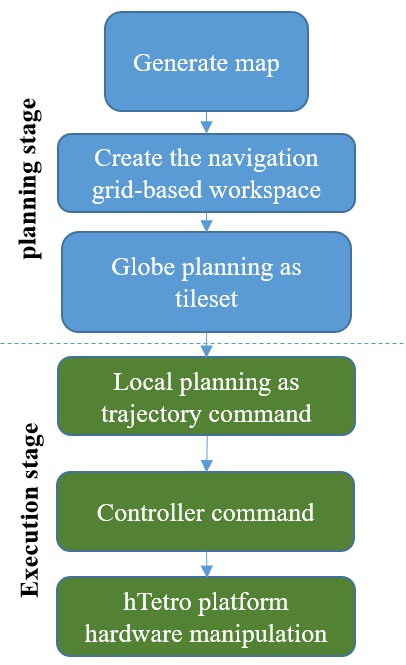
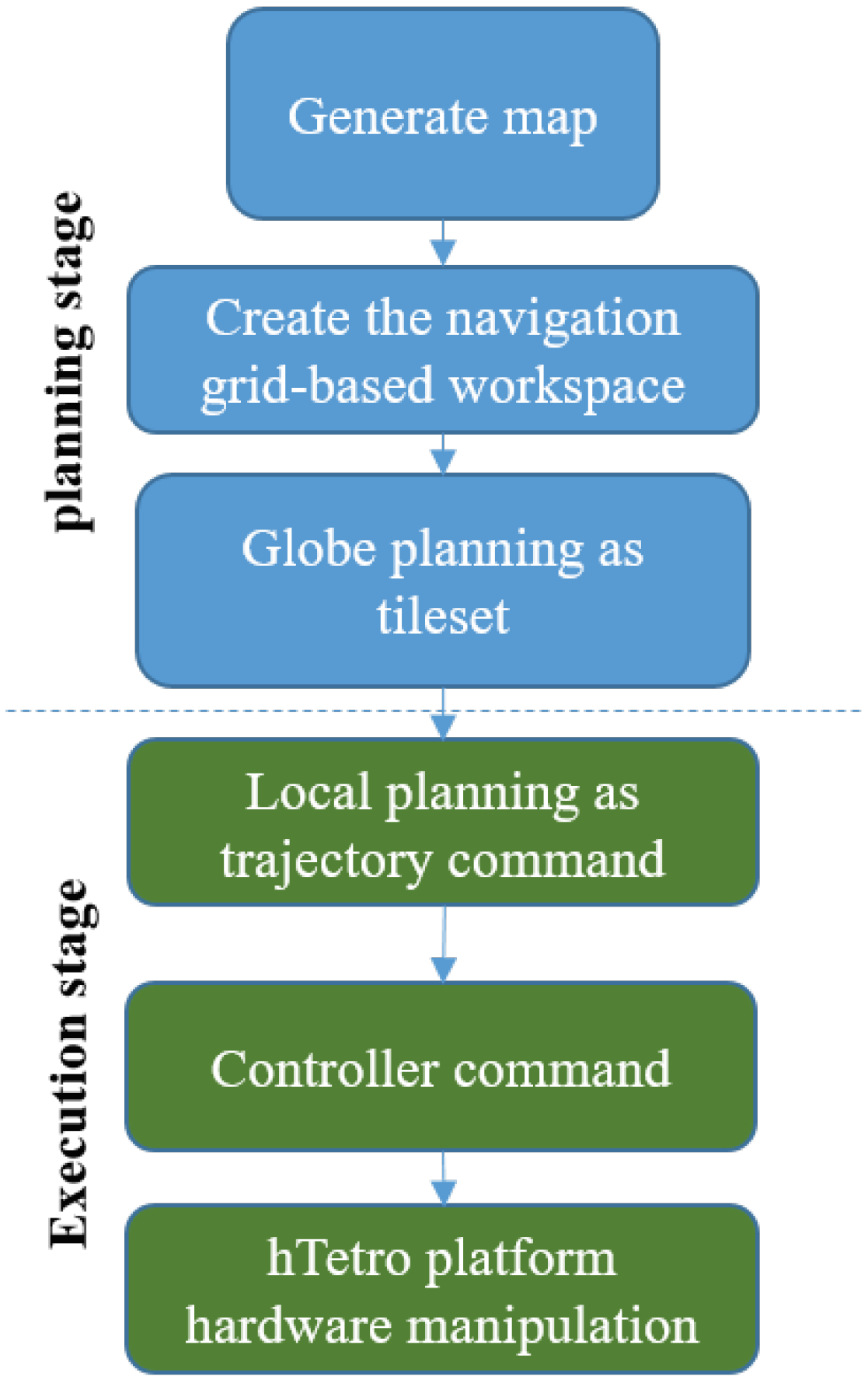
The motion planner framework for the hTetro robot over complete coverage tasks is shown in
Figure 1. Note that the choices of the global tileset, the feasible local trajectory, and the mechanism morphology of the robot are critical for achieving the area covering targets. It allows a customized robot to evaluate the geometry of the environment, compute desired body morphology as a global plan, select associated local optimal trajectories, and generate appropriate motor primitives. The process of the proposed tiling motion planner is divided into a set of different stages. The first stage is the planning stage where the high-level global coverage planning will be based on the tiling theory. The second set is the execution stage which produces the trajectory based on TSP (i.e., motion planning) to complete the tileset and then generates the control commands making the robot navigate for optimal locations with appropriate morphologies.
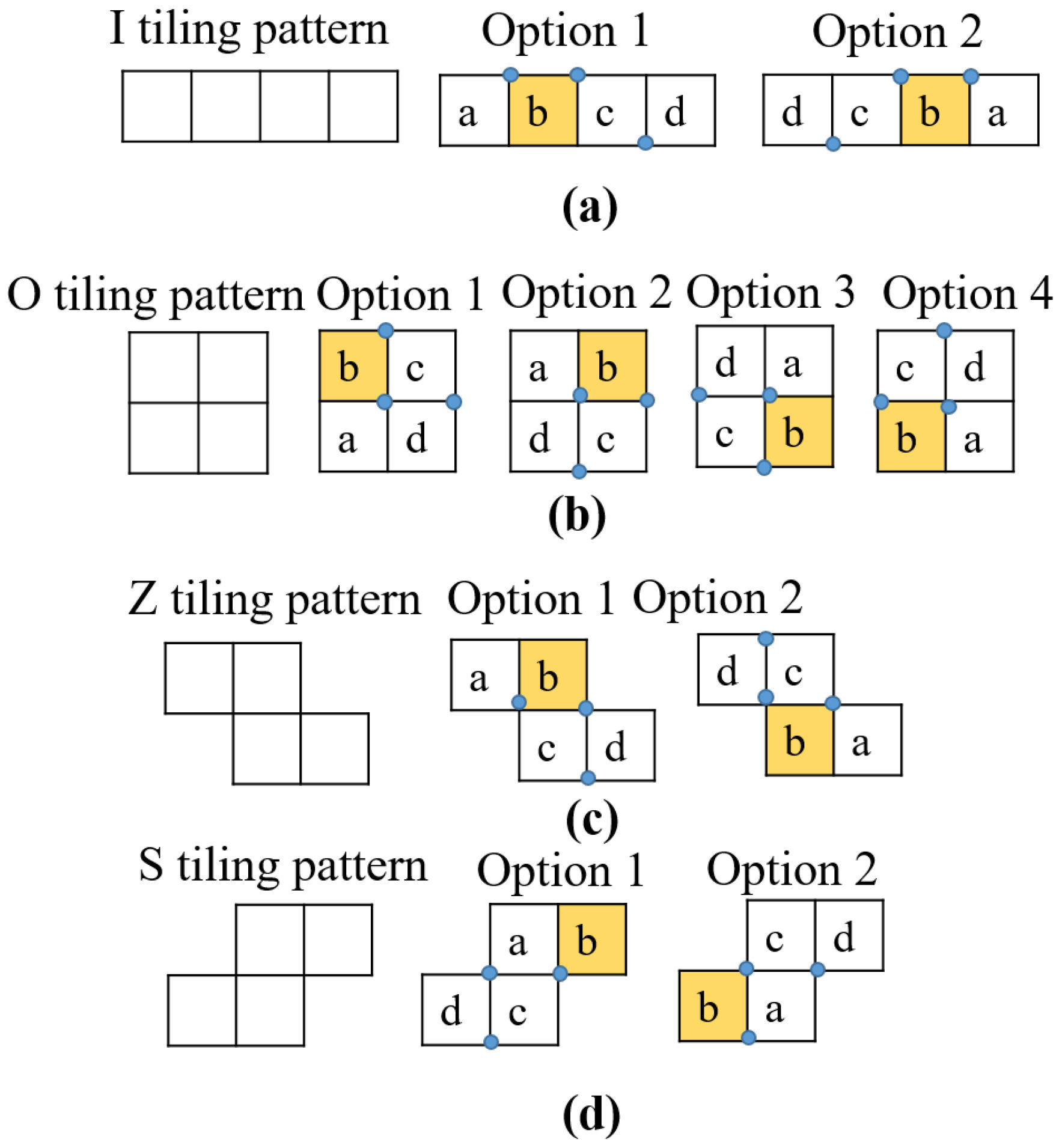
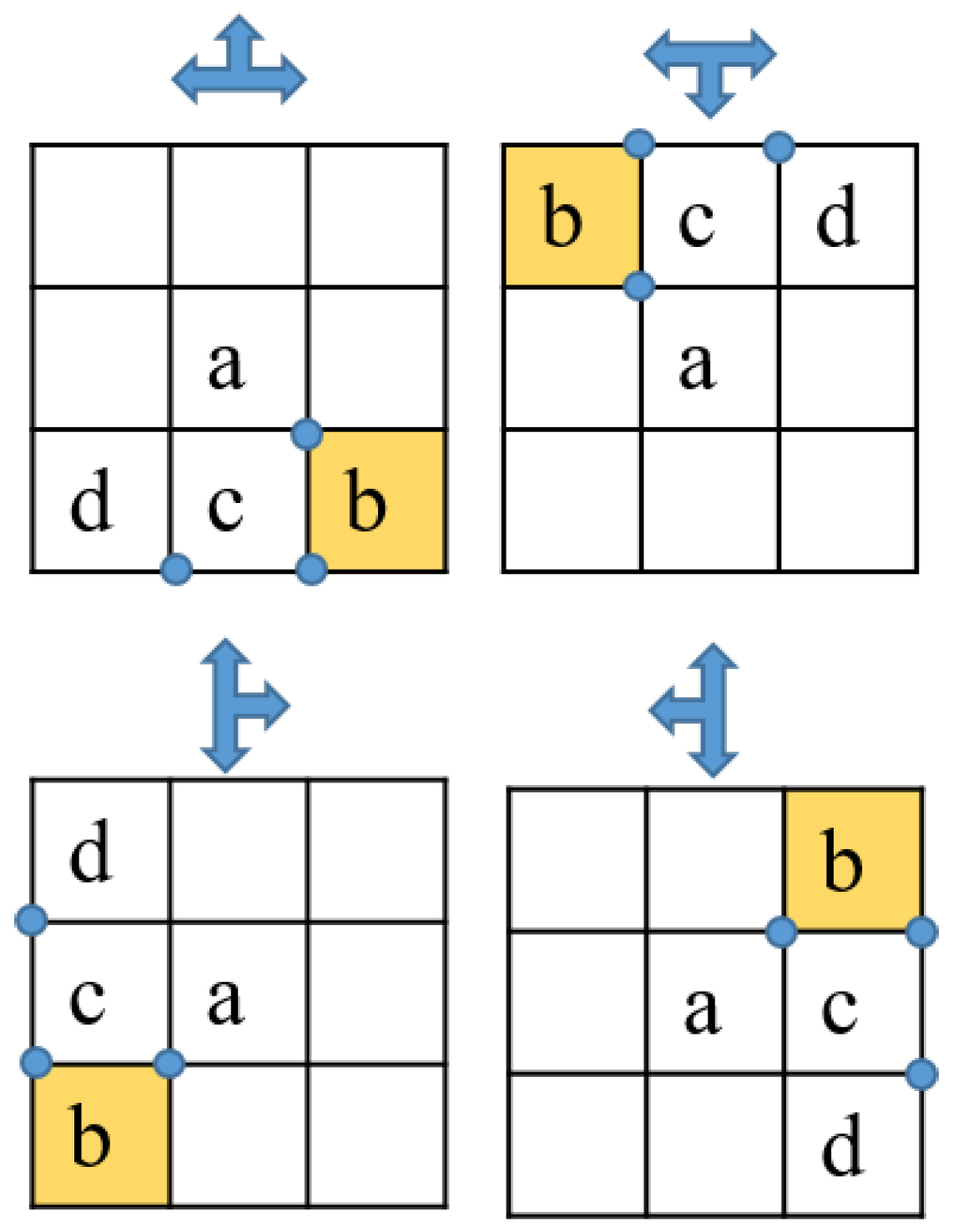
Specifically, The tiling theory [
32] used to create patterns of polyominoes such as dominos, triminos, and tetrominoes assists in completely covering a given workspace. The hTetro platform in this paper can change its morphology to seven tetrominoes and adapt into particular tileset plans. However, this tiling-based generated set can have the flexibility of random ordering. Thus, the navigation algorithm applied with the class of shape-shifting robot must select the shortest route with the least energy to visit each waypoint defined at the location of the tileset precisely once. Typically, we use the TSP to model this class of problem. By following the solution of the TSP, less energy with the shortest Euclidean distance is achieved. Note that in this paper, the TSP cost functions are derived with respect to hTetro kinematic design during shapeshifting and navigation inside the testbed with all predefined tiling patterns. The main difficulty of the TSP is the immense number of possible trajectory options:
for
n waypoints. There are numerous algorithms to solve the TSP aiming the shortest path and runtime optimization, such as zigzag, spiral, and greedy search [
37]. However, real-time path planning and control logic on decisions made dynamically for the shortest distance in the prescribed path is highly required. Thus, to speed up the processing time for deriving the optimal solution, the genetic algorithm (GA) [
36] is a feasible solution.
4. Trajectory Generation
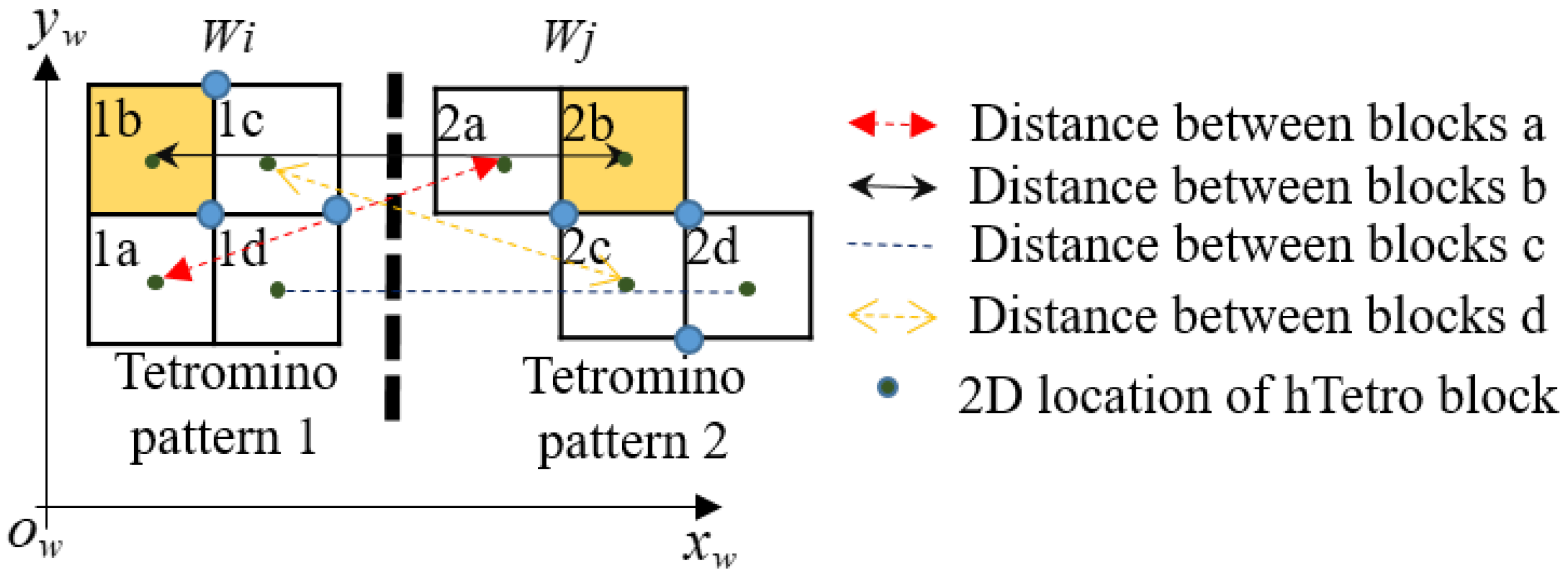
In the case of
n tiling patterns generated to cover the workspace completely, after locating the blocks of hTetro inside the workspace, the desired path
is the set of
n − 1 segments where each segment connects a pair
. The objective function of the path searching problem is formulated as in (
4) given as a list of tiling patterns, locations, and the cost weights between each pair of waypoints with respect to block
b, the shortest possible route where each waypoint is visited exactly only one time is obtained. To get the output value of (
4), the GA of TSP is applied. Reference [
36] explains the GA of TSP in detail. GAs are suitable for dealing with big searching candidates and autonomously finding the optimal solution.
Specifically, the GA as in Algorithm 2 for tiling motion sequence generation starts with a set of trajectories within the defined workspace, called the population. Since there is a high chance that the new population will be more suitable than the previous one, the temporal route from one population is considered to create a new population. Solutions are selected according to their fitness by producing and mutating the processes to form new solutions called children of parents—the lower their weights, the more chances they have to reproduce. The best children are added to the final route. If the termination condition as the improvement of the current best solution is satisfied, this process is stopped, and the best order of individual waypoints is output. The population size defines the GA’s convergence speed. If the size of populations is large, then the GA slows down [
36].
During the GA construction process, we chose 60 chromosomes as the initial population since a population size of 50–100 is commonly used in normal GA problems and this population size provides a decent diversity in chromosome genes and it is a considerably small size, which speeds up the computational process.
Currently, the setup of chromosomes in our GA is straight-forward. Since all the waypoints have already been labelled, each chromosome consists of a sequence of the indices of the waypoints that the robot is going to visit. In this scenario, performing a single locus gene change for the mutation process will result in a waypoint being visited twice while another waypoint is unvisited. Therefore, we perform a mutation swap similar to a 2-opt algorithm during the GA process. This process produces an offspring that inherits most of its parent’s genes but with two random waypoints swapped. During the GA process of our proposed scenario, crossover is not included in the pseudocode due to a similar waypoint re-visiting issue.
Moreover, the cost weight between waypoints affects the decision for selecting the best children. The proposed cost function as per Equation (
2) is feasible to model our hTetro platform. As a result, the GA with TSP works well with all dynamic environments, and is applicable in reconfigurable robots with specific angular movements.
| Algorithm 2: Genetic Algorithm |
| 1 Function GENETIC ALGORITHM {tileset, tiling waypoints locations}: |
| 2Define the location of the reference block |
| 3Define the cost function between two waypoints. |
| 4Initialize the random waypoints of the population. |
| 5 While (Stop condition is not satisfied) DO |
| 6 Select parents: possible trajectories to connect all waypoints from the population. |
| 7 Produce children: from the parent trajectories which are selected. |
| 8 Mutate: perform swap mutation between two random waypoints |
| 9 Extend: the population size by adding the best children to the population. |
| 10 Reduce: the population extension. |
| 11 end |
| 12Output the optimal order of each waypoint. |
| End Function |
5. Experimental Results
To evaluate the performance of the proposed motion planning framework to cover the predefined areas given the generated tilesets, the experimental workspaces on the simulated environment were partitioned as grids. The workspaces without obstacles had the column × row sizes 10 × 10, 8 × 7, and 6 × 6, and the workspace with obstacles presented as the number −1 had the size of 11 × 11. Specifically, the proposed technique was benchmarked with three conventional motion planning techniques used in complete path planning: zigzag, spiral, and greedy search. The comparison criteria included efficient path generation, time, and re-covering workspace to complete the generated paths. The simulations were conducted using MATLAB Simulink.
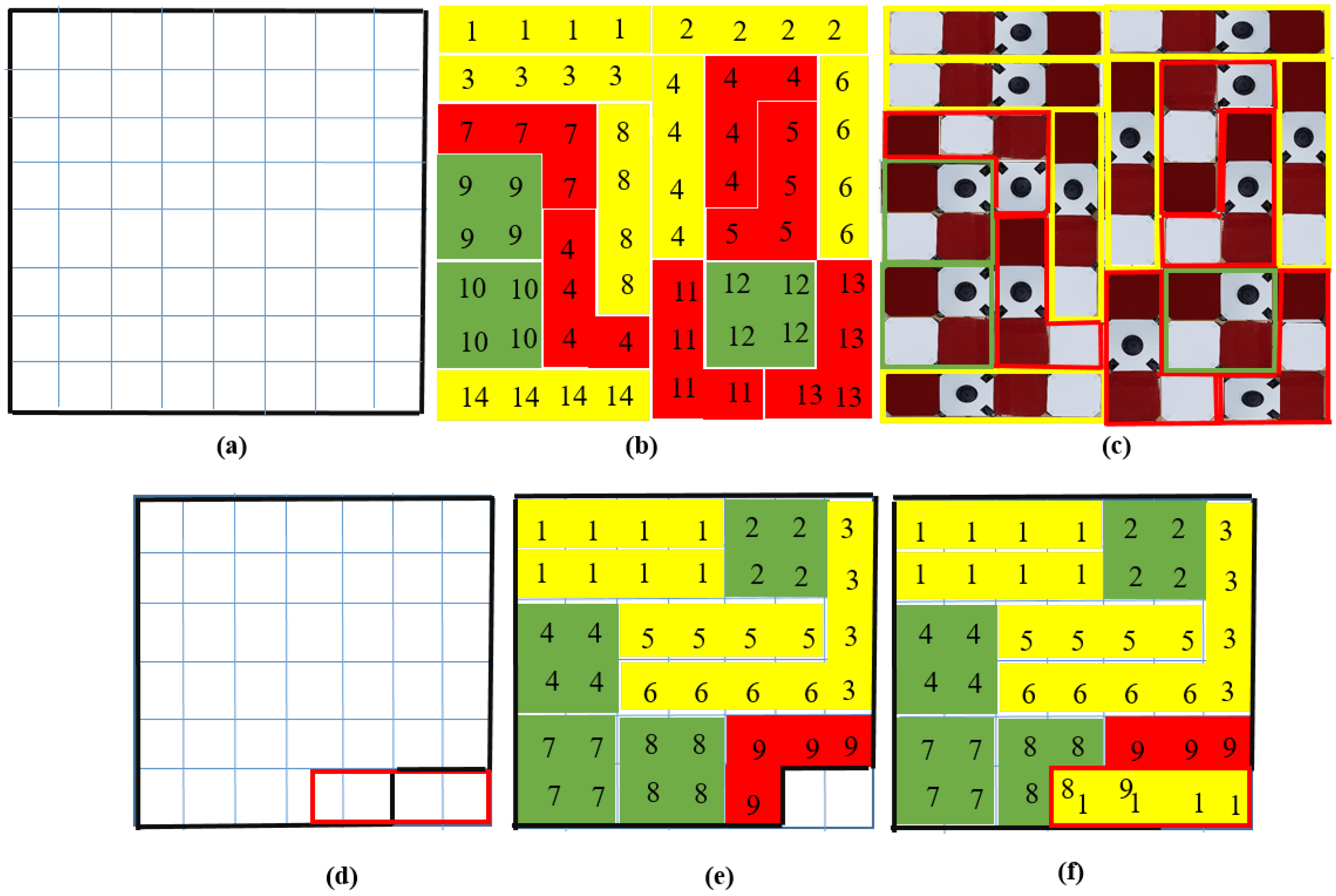
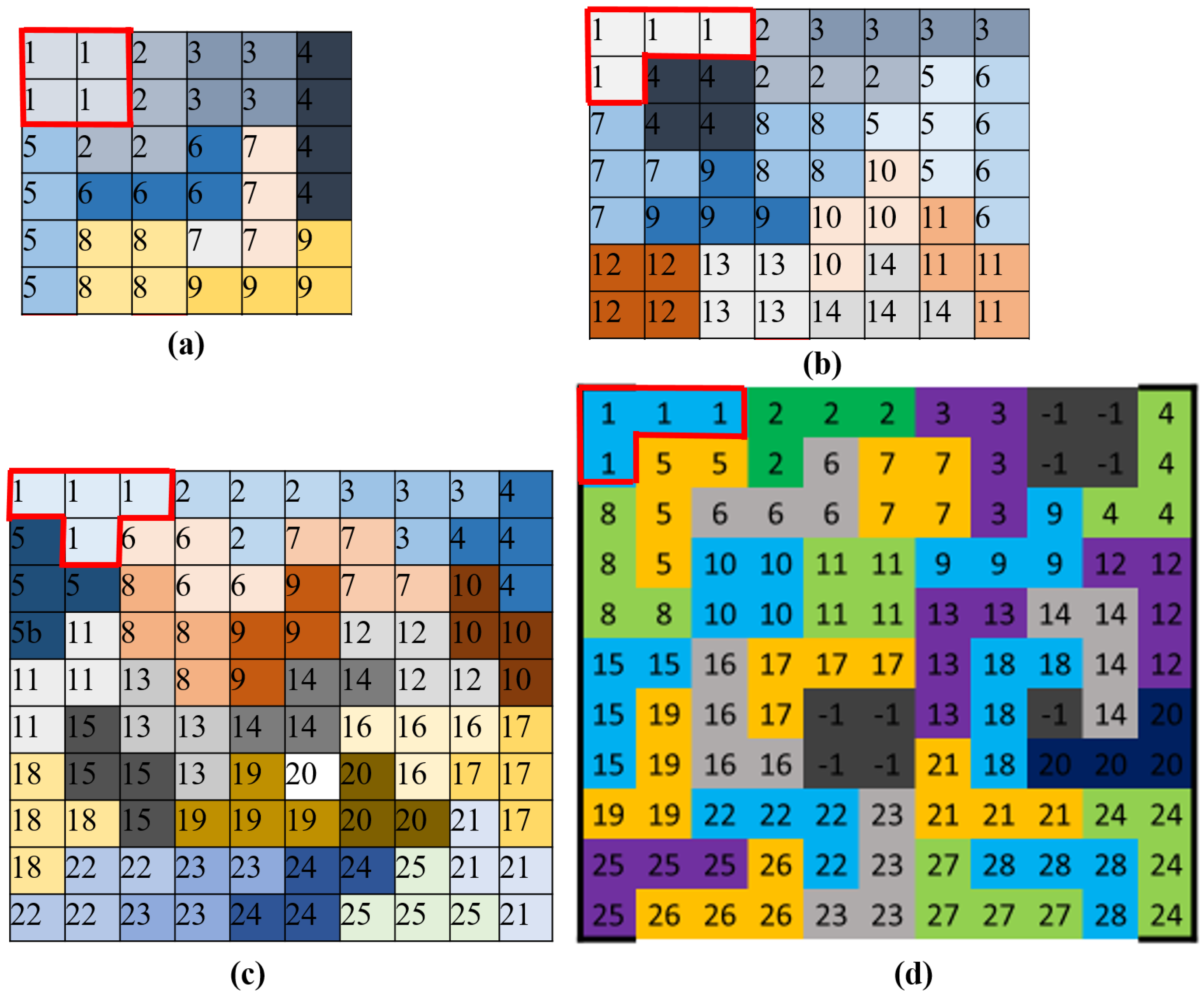
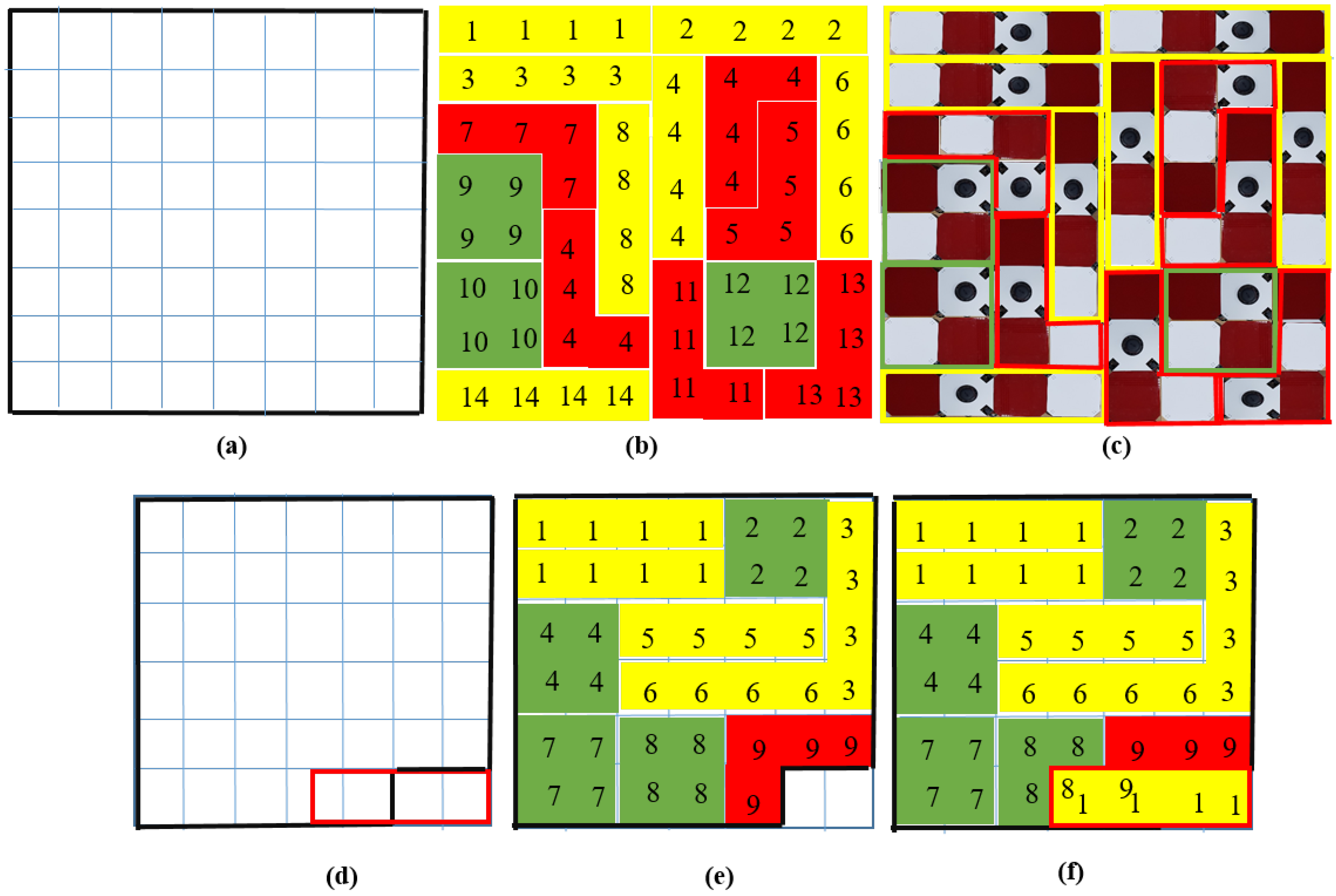
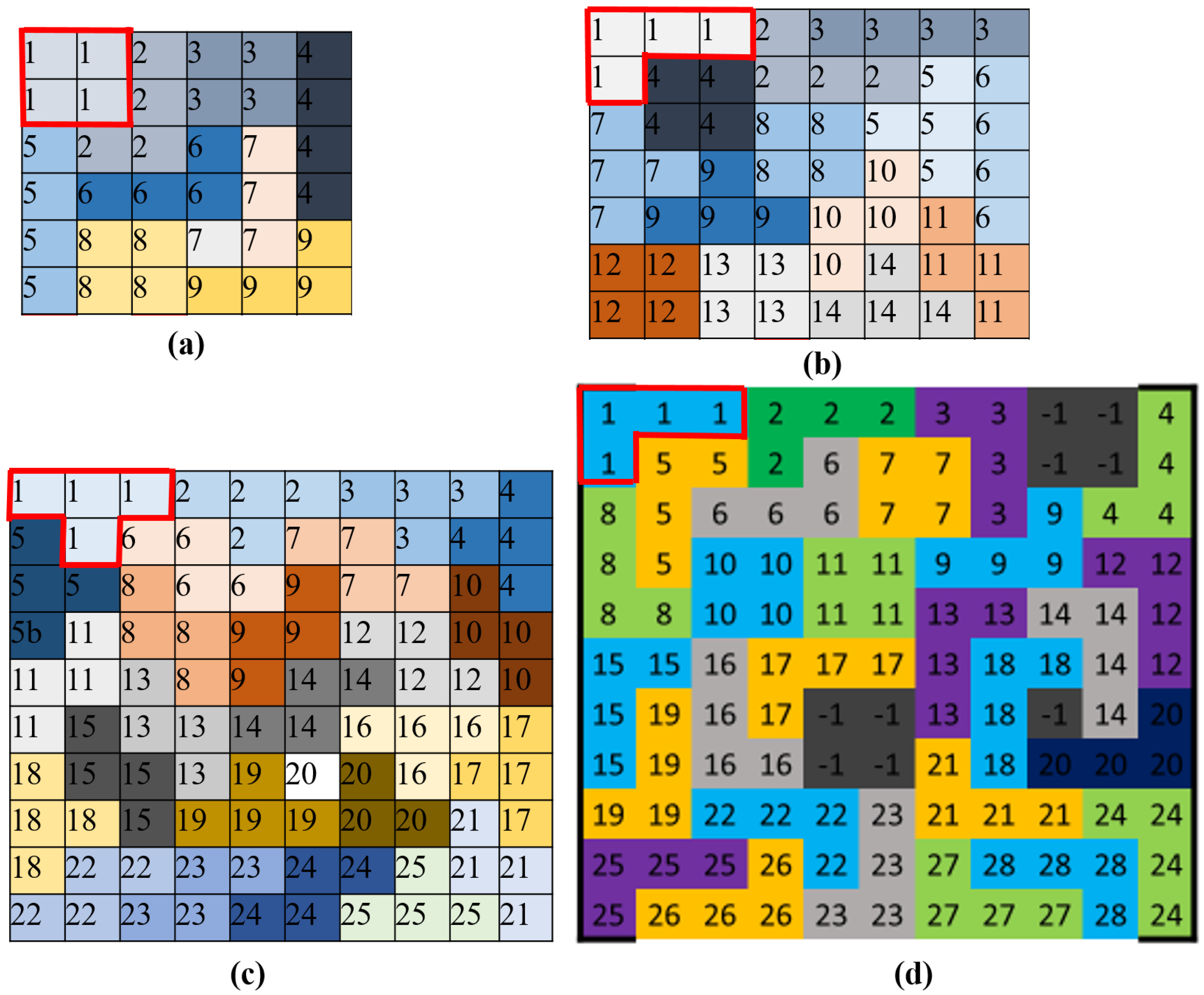
In part one of the experiments, we evaluated the path generation for each test, and the generated tiling patterns for workspaces are shown in
Figure 12. Depending on the workspace size, the tiling theory can select the appropriate tiling shapes and orientations, that is, in
Figure 12a the 9 tilesets of L, Z, J, O, and in
Figure 12b the 25 tilesets of Z and T were used. Furthermore, considering the workspace with obstacles as in
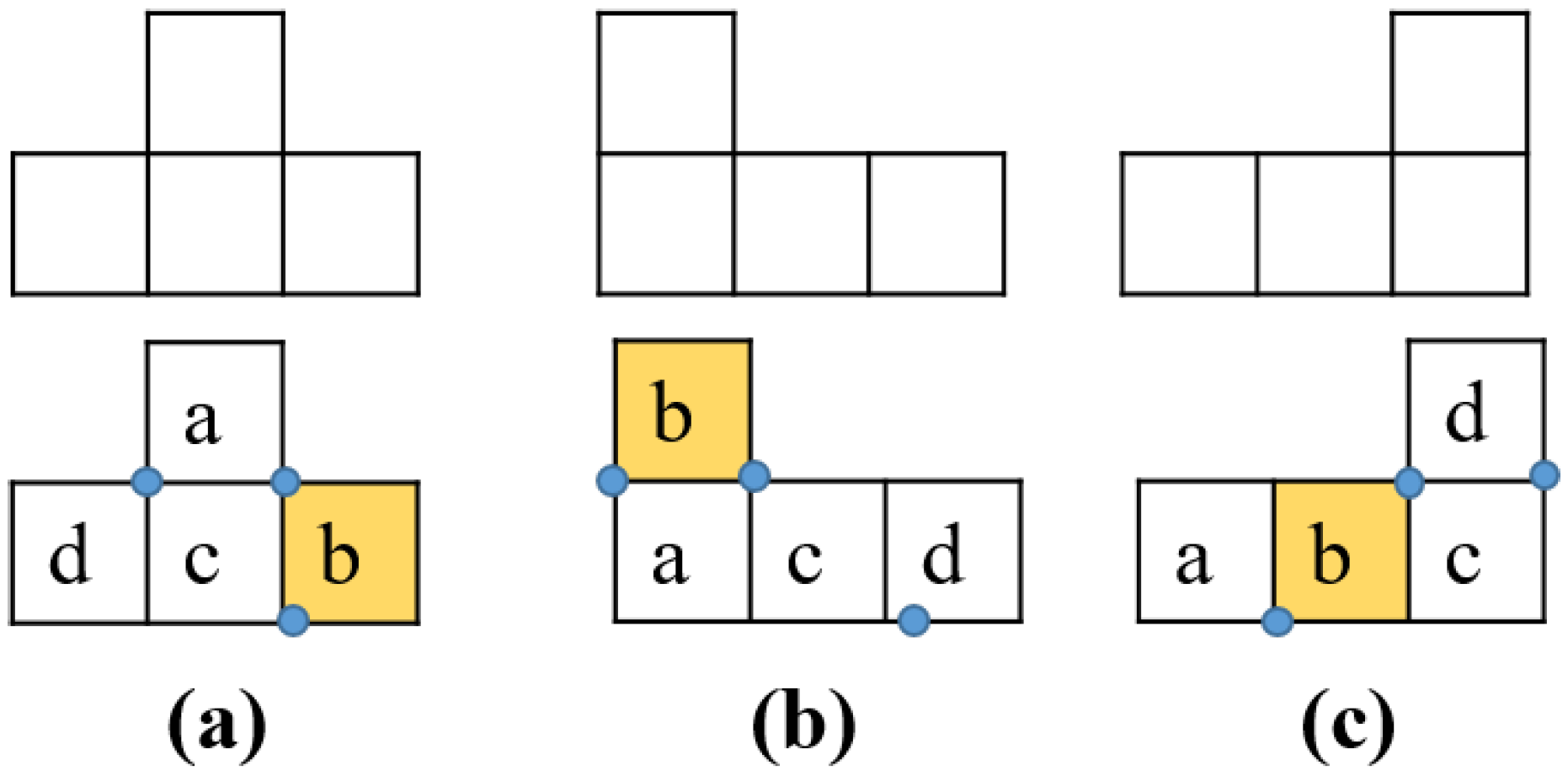
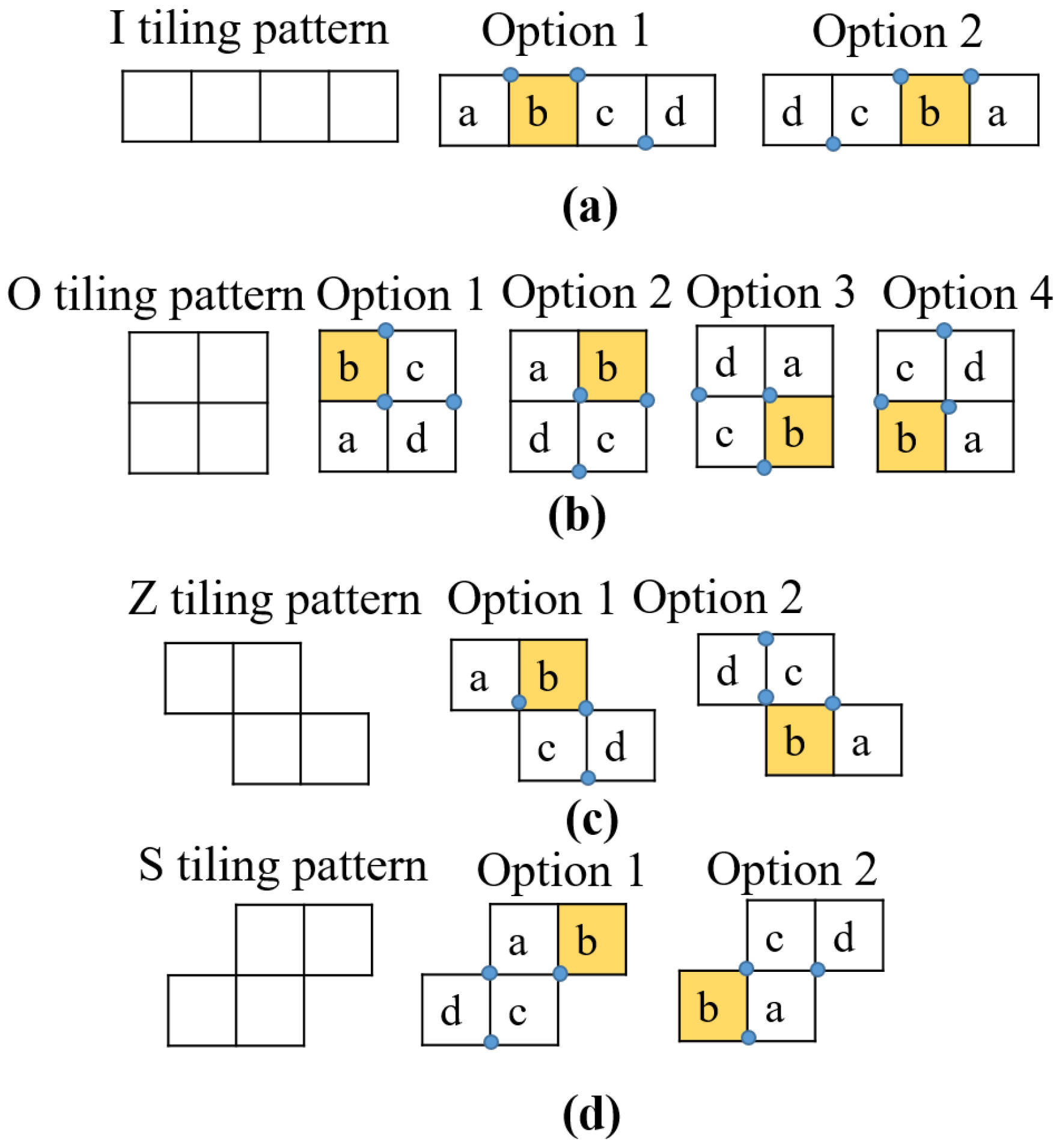
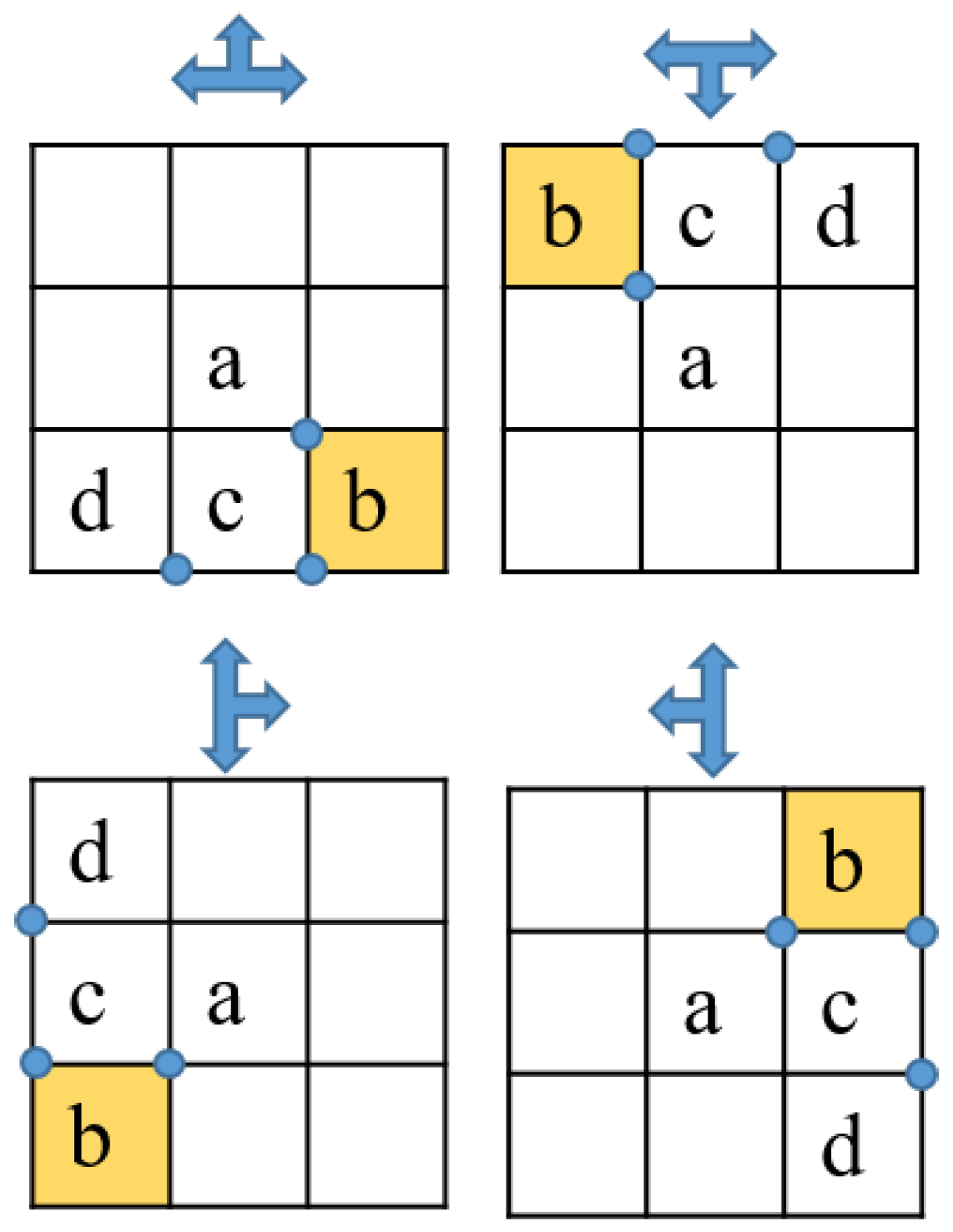
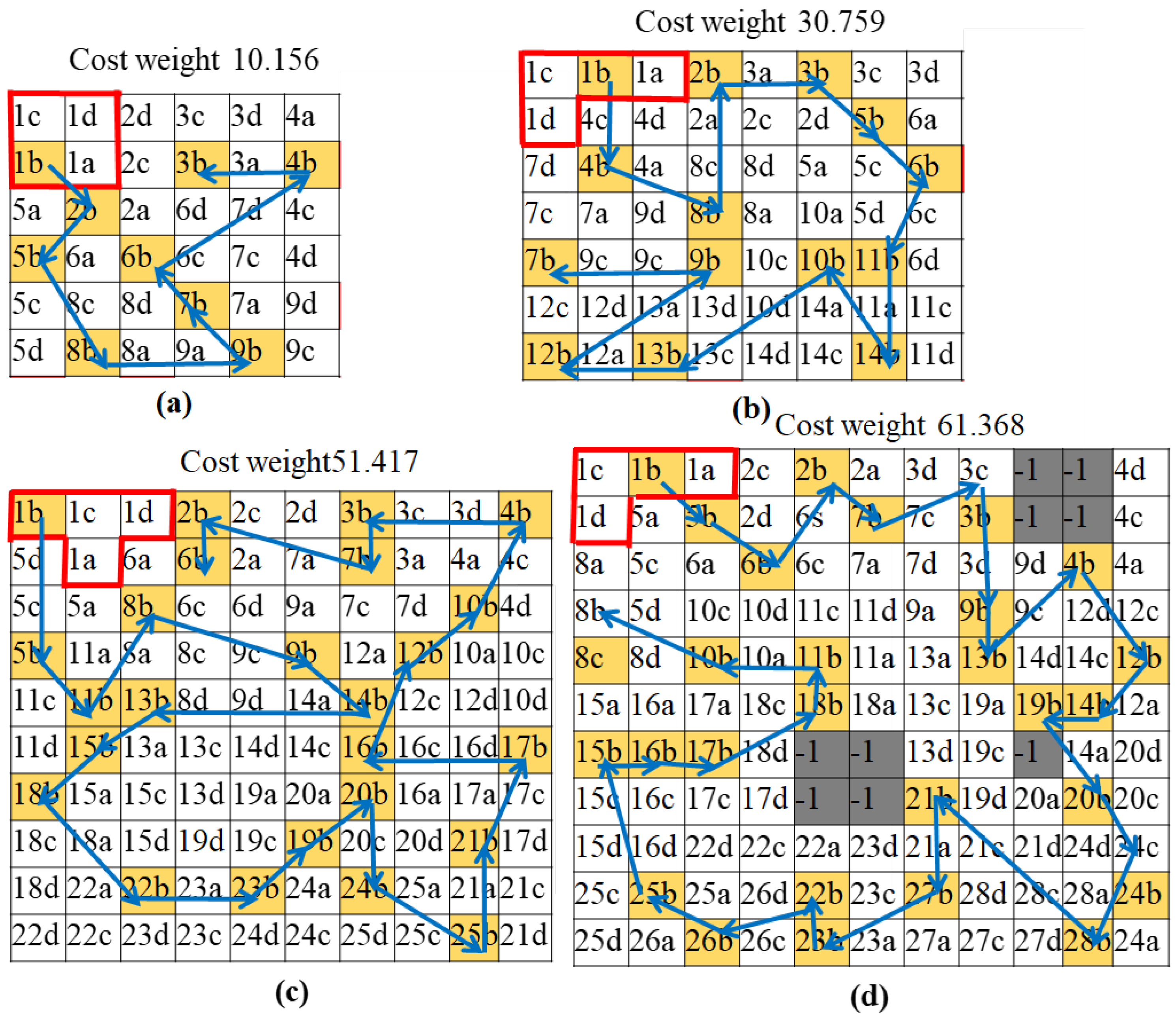
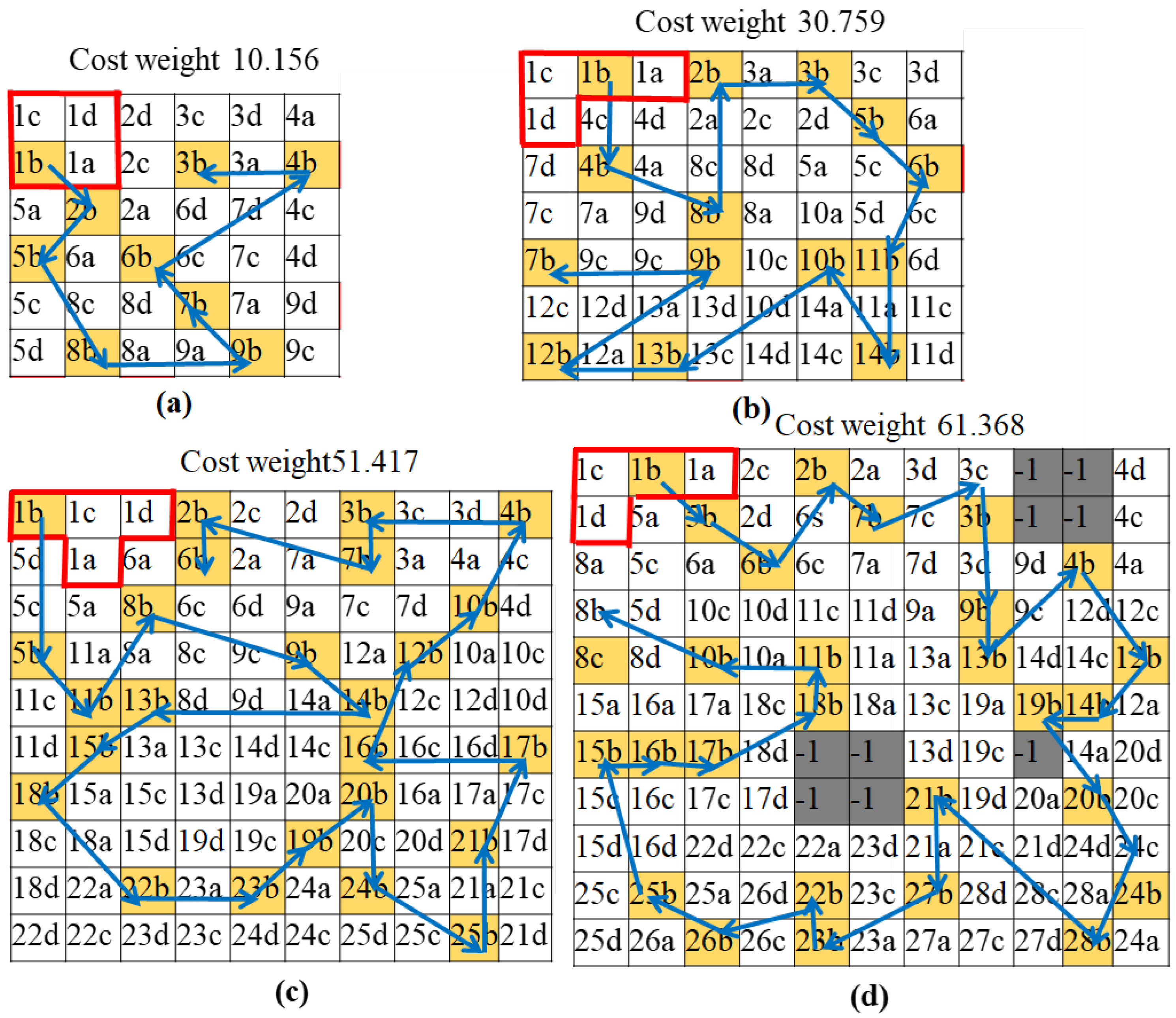
Figure 12d, the tileset was generated by selecting the appropriate tetromino types to cover all of the cells without obstacles. As a result of the row-wise search in Algorithm 1, in order to number the reference block
b for each generated tileset as in
Figure 13, each block location (
a, b, c, d) on the workspaces is clearly visible. After four blocks of hTetro are located for each tiling pattern, the optimal path searching algorithm (GA for TSP) can generate the robot’s navigation trajectory to connect all the
b blocks in each tiling pattern. The total associated costs and generated trajectory (directions) for each testbed are shown in
Figure 13. Note that the cost weights as per Equation (
2) with coefficients
were applied to all the testbeds.
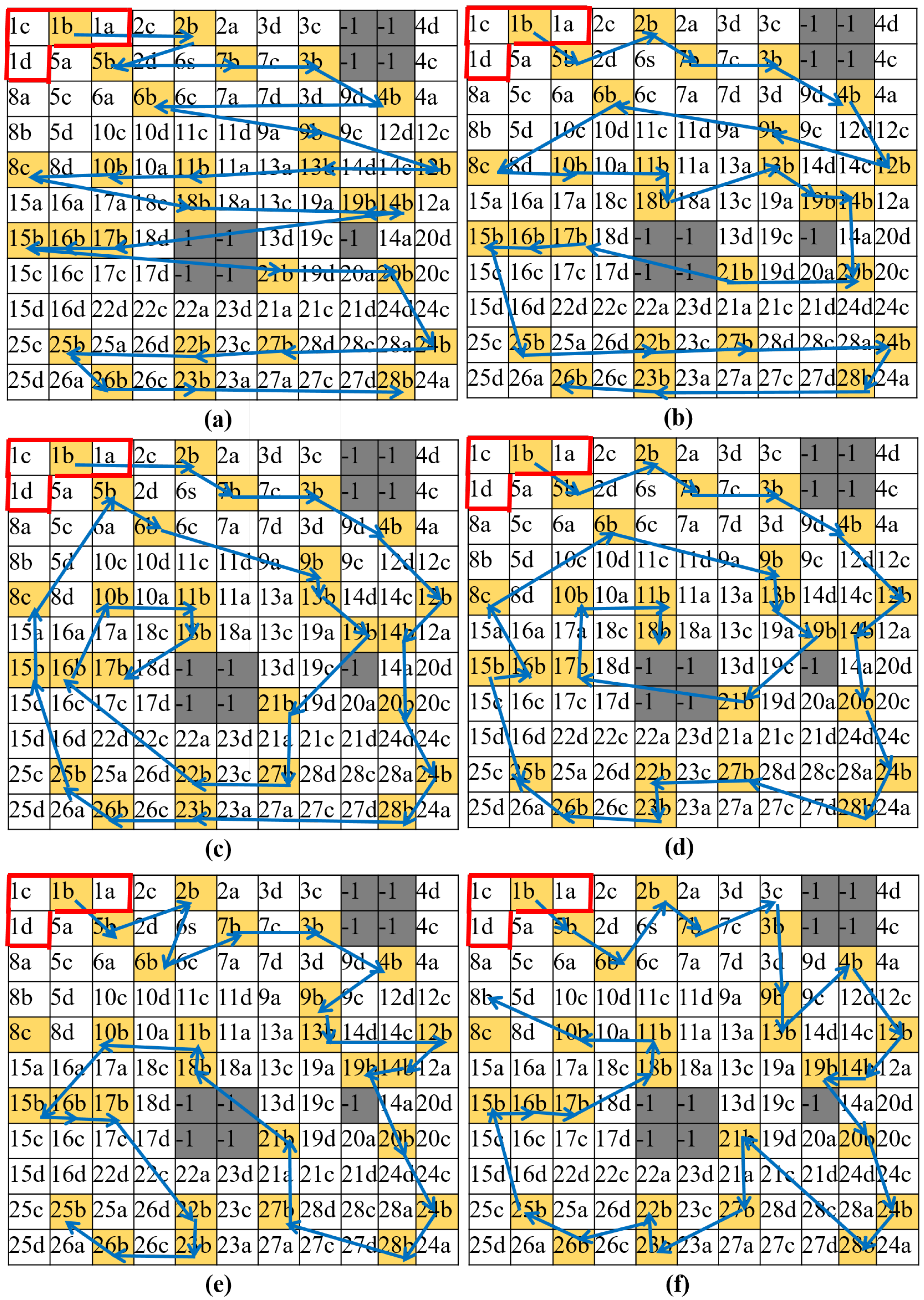
Figure 14 shows the trajectories, and
Table 1 provides the cost weights and running time generated by zigzag scanning, spiral scanning, and the greedy search method with 10,000 iterations and the proposed method for an 11 × 11 workspace grid with 28 waypoints, respectively. Note that the zigzag scanning method connects the waypoints by the one-row or two-rows-wise nearest searching. The spiral scanning methods connect waypoints from out-to-in by one-row (or column) and two-rows (or columns) based nearest searching. Zigzag and spiral are being mentioned and evaluated because they are the most prominent algorithms implemented in current mobile floor cleaning robots (especially the zigzag pattern algorithm). Demonstrating a different approach that has the potential to outperform existing robot navigation models is crucial for our future implementation. The greedy search provides only the choices for random trajectories from the initial waypoint and continuously searches for the next nearest reference waypoint to connect all the waypoints and selects the path with the lowest associated cost. As a result, the proposed method required a slightly longer running time than zigzag or spiral scanning and had a significantly lower running time than the greedy search. Regarding cost weight, the proposed method could generate the path with the lowest value.
Although the zigzag and spiral scanning methods could give the solution to tile the predefined area almost instantly, they produced the longest travel path regarding the hTetro block movement. As a result, to finish the generated trajectory of these methods, time spent to travel was significantly high. Besides, the greedy search took the most time to create a path connecting all waypoints and its generated cost weight was also higher than the proposed method. Although taking a slightly longer time than zigzag and spiral scanning to generate the path as a results of optimization processes, the proposed method yielded the lowest cost function and it could considerably reduce the time and energy consumed when robot traveled to cover the workspace. It can be said that the proposed method gives a compromise solution between time spent to generate the traveling sequence and time spent to complete the plan. This proves that the TSP in combination with GA is feasible and suitable to generate navigation trajectories for this reconfigurable robot.
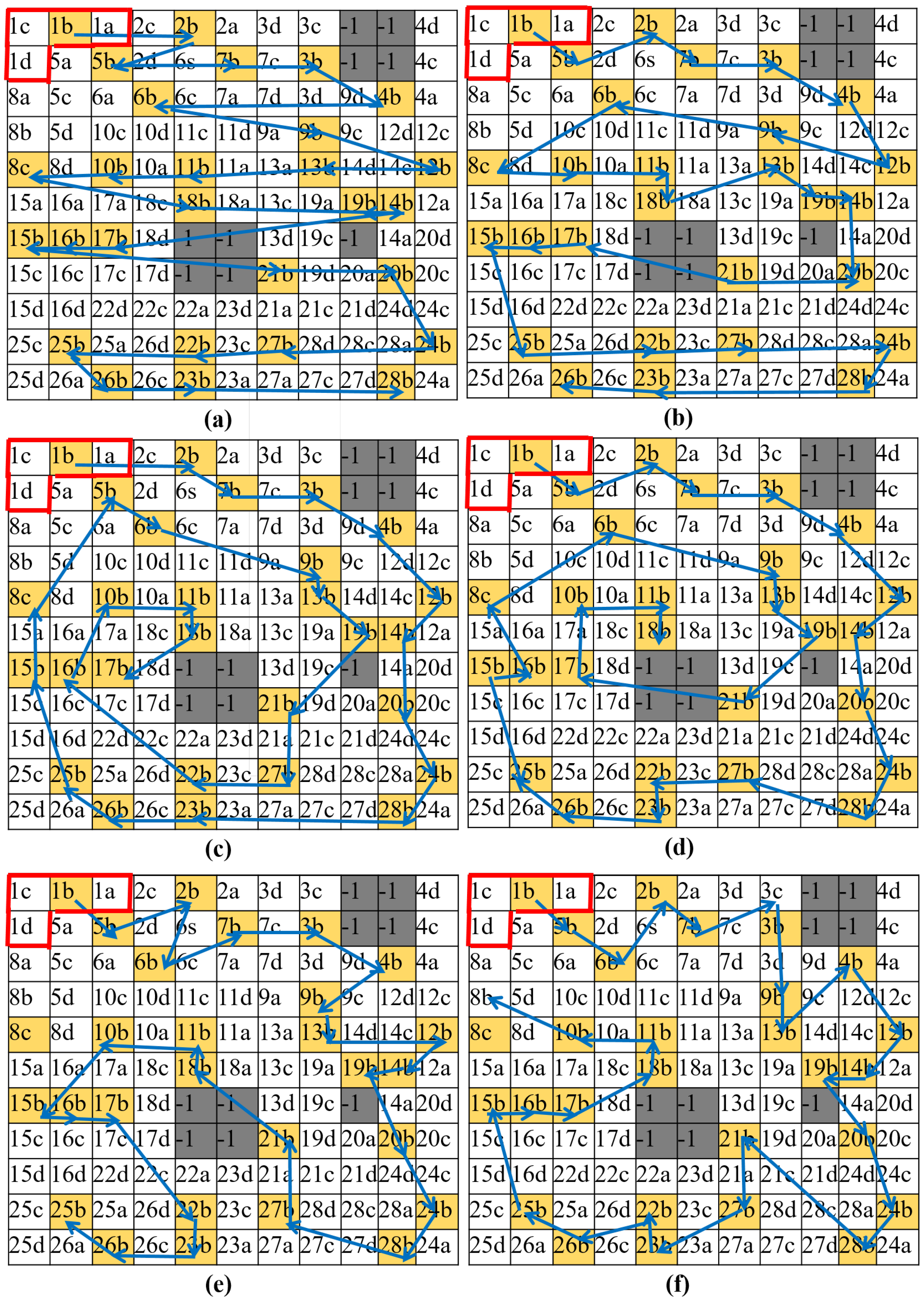
The effects of changing the coefficient values in cost function (
2) were considered.
Figure 15 and
Table 2 show the results of different coefficient settings. As one can see, the different paths with corresponding associated costs were generated for different coefficient values.
Figure 15a where value
was set to one and others (i.e.,
) were set to zero shows that if we consider one given optimal path generated with the cost function of only
b, the cost weight considering four blocks of this path is considerably higher. Furthermore, considering one workspace size, tiling theory worked well to generate different tiling patterns.
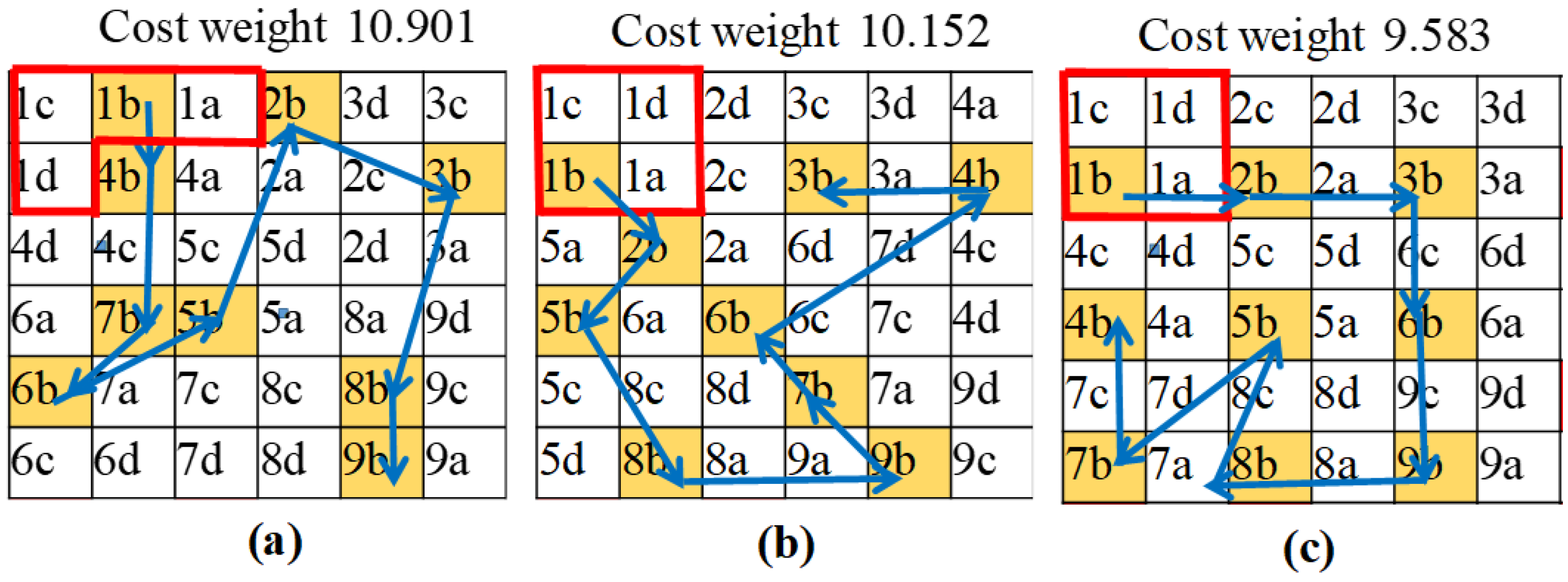
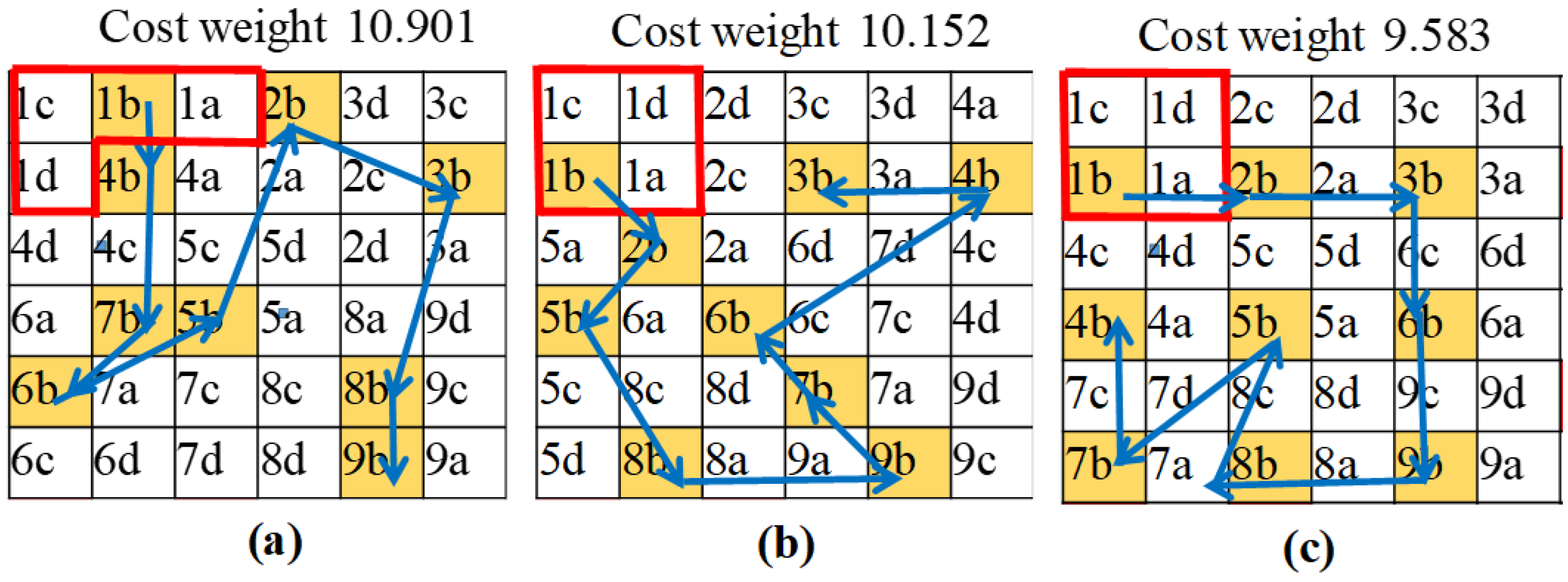
Figure 16a,b show the two tilesets with their optimal path planning and corresponding costs required to cover the
grid space by tiling theory, and
Figure 16c is the tileset for only the O configuration. Given the tiling pattern O and the workspace as in
Figure 12, the O configuration could completely tile
Figure 12a by the path in
Figure 16c without re-visited areas, yielding lower cost weight than paths with several tiling patterns generated by the tiling theory in
Figure 16a,b. Hoverer, the O configuration could only completely tile
Figure 12b,c with several revisited areas, and failed to completely tile
Figure 12d with obstacles. In this paper, we suggest the tiling theory as the autonomous framework to ensure complete tiling of the workspace without revisiting grid cells since these are two of the most important aspects of cleaning robots.
Table 3 gives the results of cost weights for two possibilities of tileset for each tested workspace. Based on the available options of tiling patterns suggested by the tiling theory, several of the optimal navigation sequences associated with the minimum of the defined cost weight for different tilesets were acquired by proposed trajectory generation. Then, the robot could choose the appropriate tileset considering the minimization the sum of each block displacements and according to our preferences in terms of time efficiency and energy efficiency to cover the predefined workspace.
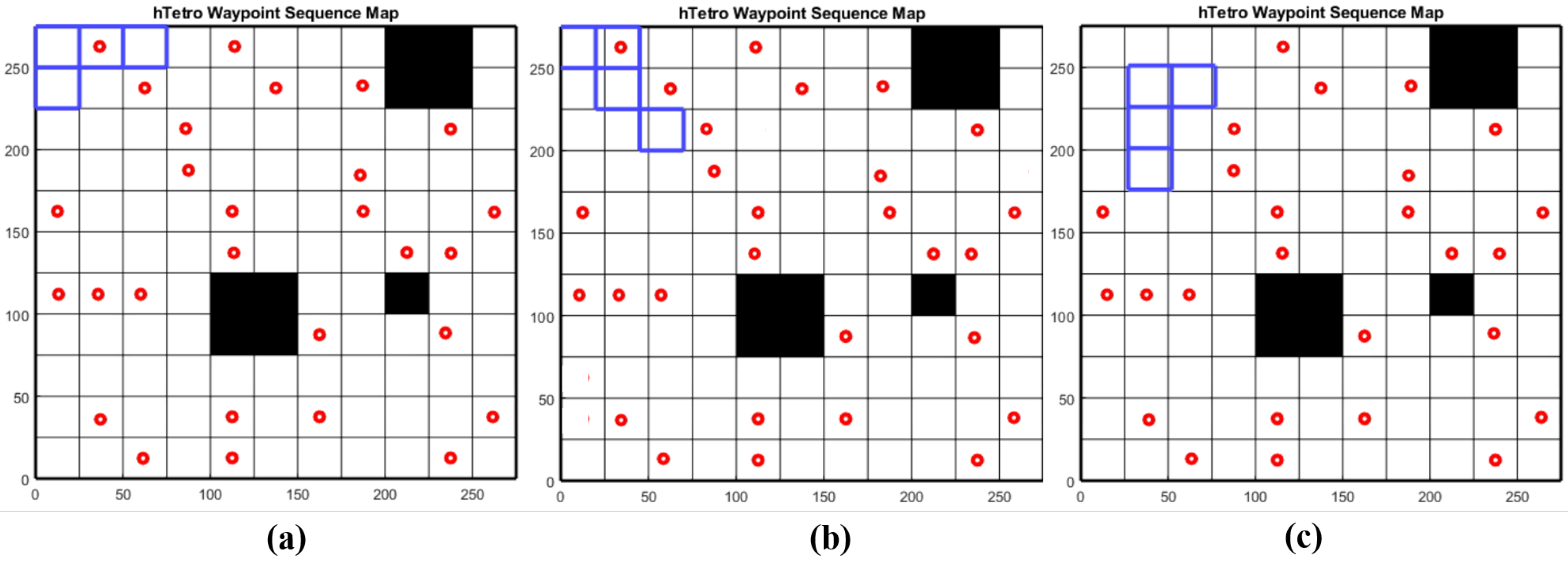
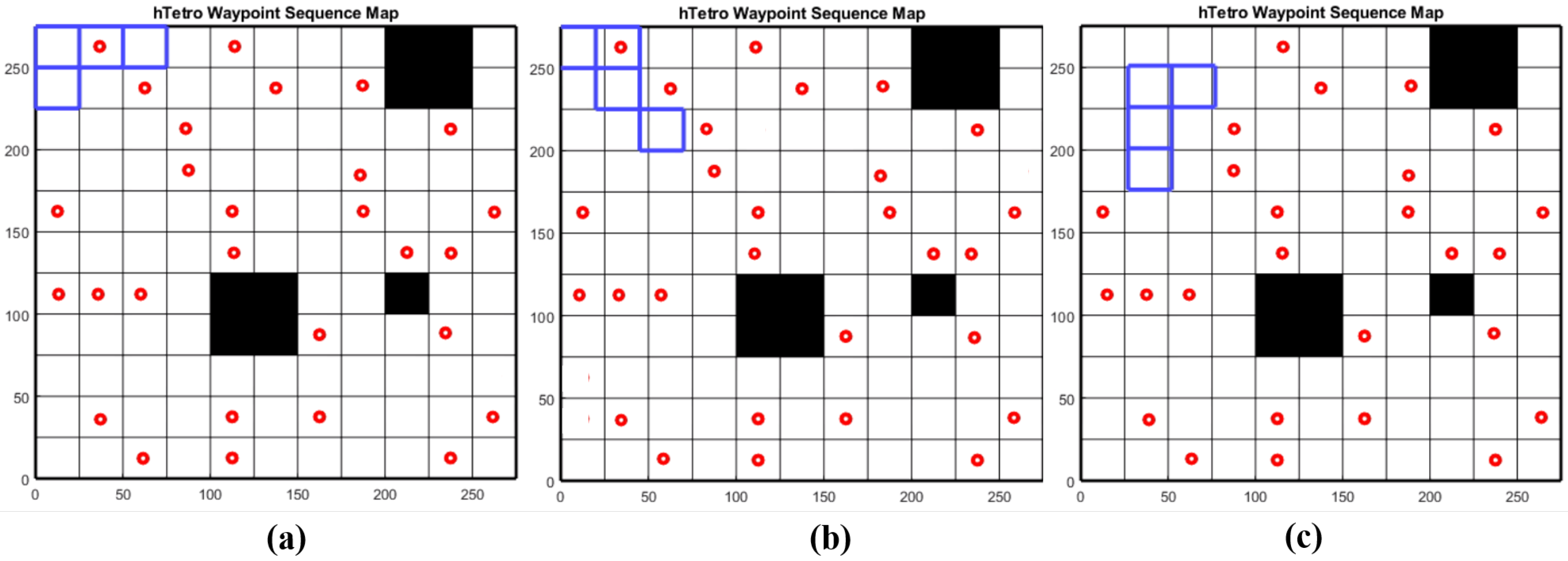
In part two of the experiments, the simulator initiated the robot’s navigation right after applying the specific path planning technique to complete the predefined tileset. The testbed square area was converted into an 11 × 11 grid with the obstacles set similarly to the arrangement in
Figure 13d. Since the workspace cell was equal to a 25 × 25 cm hTetro block, the dimension of the workspace was 275 × 275 cm. The performance of the strategies was evaluated based on two criteria, including the total distance traveled and the average grid coverage time of each algorithm.
Figure 17 shows the simulation workspace environment, the waypoints are marked as red dots, and robot’s navigation path to clear the waypoints one-by-one were tracked. The paths generated by all test methods are shown in
Figure 14. The total distance traveled was determined based on the trajectories of all four hTetro blocks throughout the navigation process and calculated by averaging the final values of the trajectories once the navigation terminated. To calculate the average grid coverage time of a navigation strategy, we assumed that each grid in the workspace required at least 1 s to be covered by an hTetro block. Since the robot moved at a constant speed during the simulation, the Simulink could calculate the total time spent by hTetro blocks on an individual grid, and the average grid coverage time accordingly. The average grid coverage time is an important criterion which determines the efficiency of the proposed path planning algorithm in terms of area re-covered.
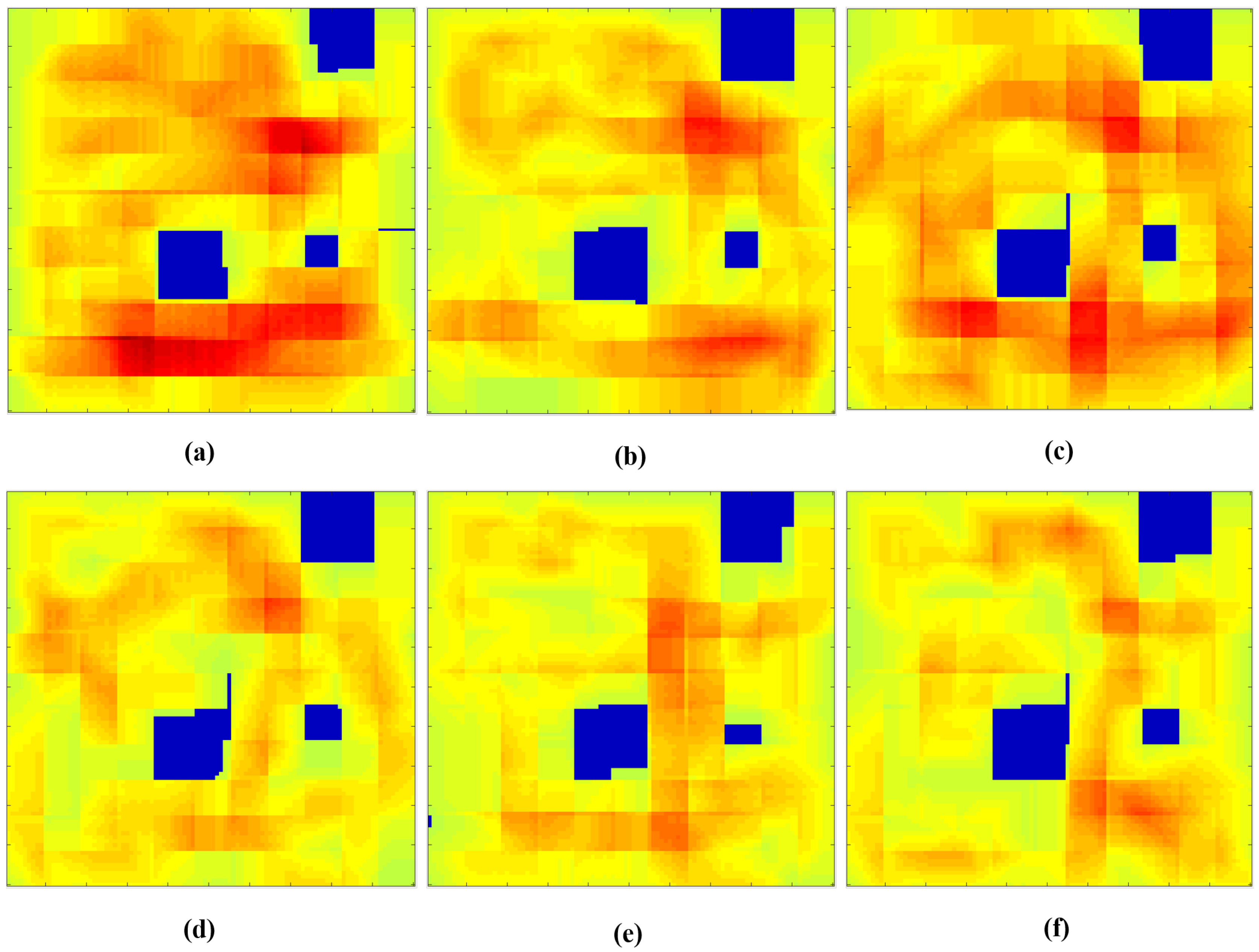
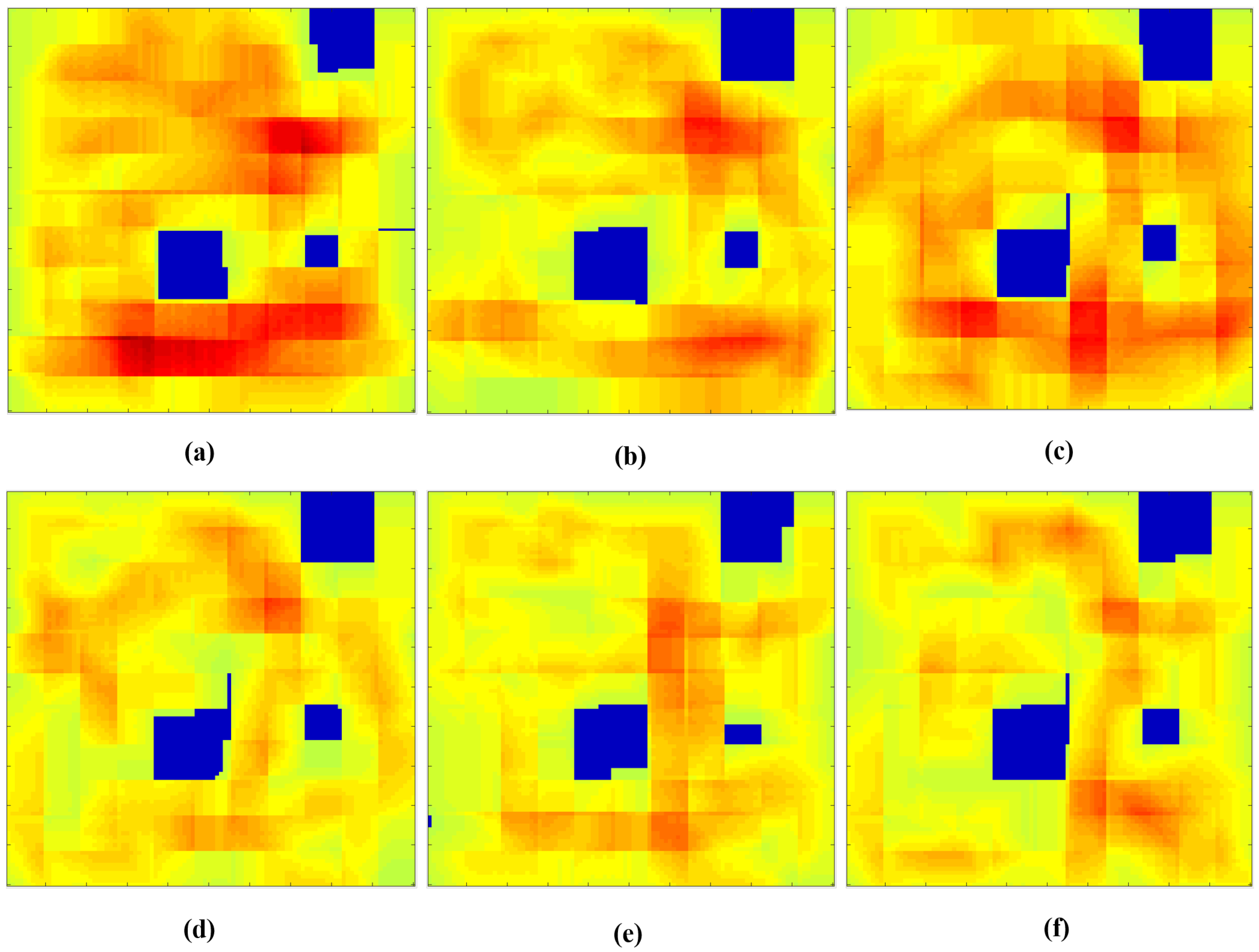
During the robot’s navigation, the simulator generated a grid coverage heat map. The robot coverage heat map includes the areas that were covered by the hTetro robot and are represented in a color spectrum between green to red and normalized to the range from 0 to 255. The intensity of the red increases when more time is spent by the robot to cover the area, indicating that the corresponding grid is being visited several times throughout the entire navigation process. The coverage heat maps generated for all tested variants (i.e., zigzag, spiral, greedy search navigation technique, and the proposed method) are shown in
Figure 18. The numerical results of grid traveling distance and the grid coverage time are provided in
Table 4. According to the results demonstrated in
Table 4, our proposed path planning strategy had an advantage compared to the other coverage algorithms, with the smallest average grid coverage time, and the shortest distance traveled. In order to have the additional information from the heat map of
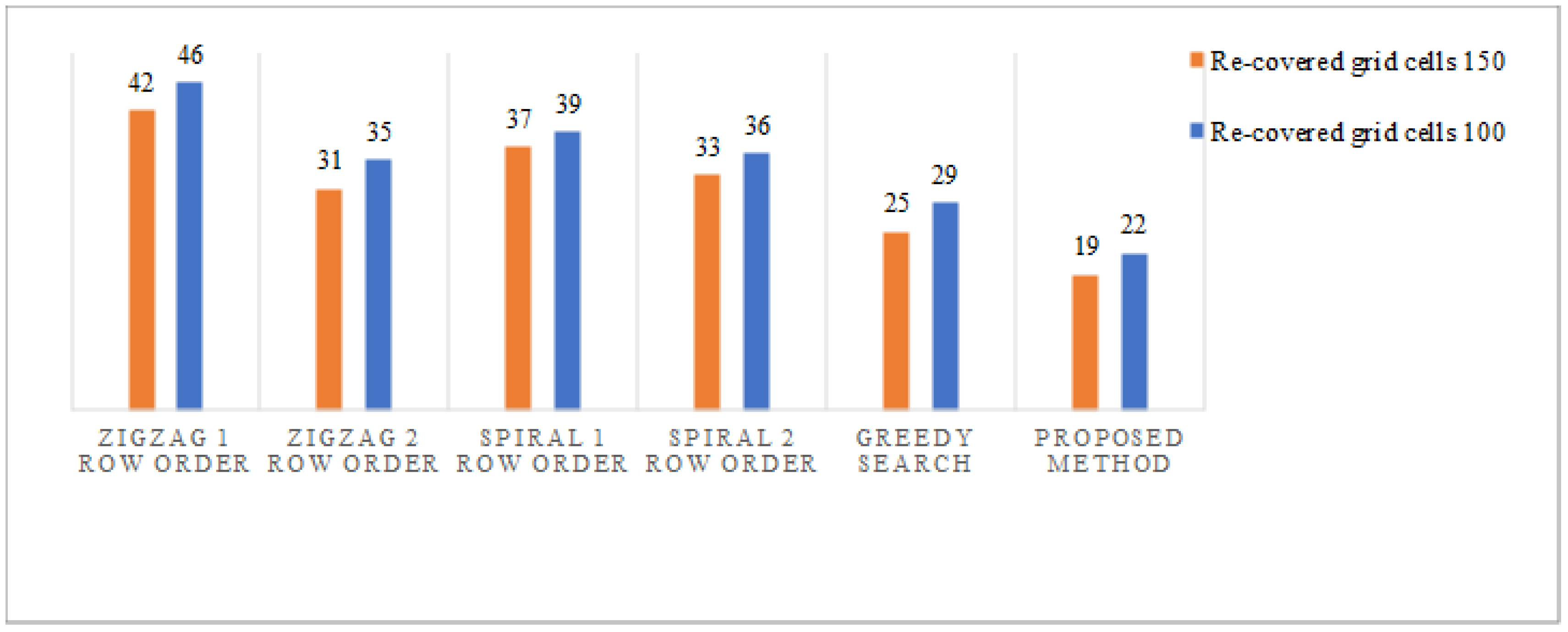
Figure 18,
Figure 19 illustrates the recovered area traveled versus all four algorithms by plotting the color values in
Figure 18 which were larger than 100 and 150. Note that the 11 × 11 workspace consisted of 121 cells, and the average pixel values of cells were considered to determine the re-covered areas. Since the intensity value of cells increased if the robot spent time to stay or re-visited the cells during navigation and transformation, the greater the number of cells in
Figure 19, the more re-covered areas in the considered method. We added the results in
Table 5 to summarize the re-covered grid cells in percentage format for the 11 × 11 workspace with obstacles. It was observed that the re-covered distance traveled in the proposed method yielded the lowest value of re-coverage percentage. The re-covered distance traveled of the proposed method was approximately 5% less than greedy search and approximately 12% less than zigzag and spiral methods.
6. Discussion and Future Works
In the present paper, we would like to address that the proposed shape-shifting robot could accomplish complete area coverage through tiling theory together with waypoint sequencing that connects the Tetris patterns. Our contribution is that we modeled the navigation sequence generation for our special Tetris-inspired reconfigurable floor-cleaning robot to complete tilesets by tetromino tiling theory as a TSP problem. Note that in our previous work, the benchmark outperformed hTetro with fixed-form robots in terms of the percentage of area coverage. The present work is the first time we considered the efficiency of navigation distance to completely cover a given workspace. Our main focus was to present a reliable and scalable framework that is capable of achieving these goals and is applicable to other reconfigurable robots in order to achieve maximum area coverage tasks while minimizing energy consumption. GA fills in the missing link between the unsequenced waypoint series to a full path for robot navigation since it is one of the fastest approaches to reach the solution for the TSP, and is scalable.
For real-time deployment, besides using GA as one of the fastest algorithms to solve the TSP, we suggest that cellular decomposition as in [
9] can be applied to segment large and complicated workspaces to several simple grid-based sub-workspaces before applying the proposed path planning framework. Furthermore, to balance the cost weight and path generating time, a running time threshold can be set for drawing the GA’s solution to a given sub-workspace. We can deploy the trial-and-error approach within our hTetro platform system configuration to find the optimal path generation time for each workspace size.
Moving forward, we have identified the efficiency optimization of the entire process as a definite priority for future works. Since the proposed complete path planning framework is essentially a two-step process (i.e., waypoint generating and waypoint sequencing), consider the following example: the waypoint generator can tile a square-shaped area using all O-shaped morphology, all L-shaped morphology, and a combination of several morphologies. The path planning strategy has to ensure the maximization of area coverage while limiting the revisited areas, and it is one of the most important tasks of a cleaning robot. However, it is apparent that the fewer times the robot changes its morphology during the navigation process, the total cost of the entire process is lower. The current tiling strategy based on tiling theory that we implemented herein is unable to identify this, since it simply focuses on the generation of a tileset that covers the area completely, which makes the search for an optimal algorithm with ideal parameters for pure waypoint sequencing a priority for further research in the future. The formulation of this entire efficiency optimization problem is interesting, and will be the within scope of another paper. Once the model is constructed, genetic algorithms with different mutation rates and crossover rate settings will be considered, and other evolutionary algorithms such as ant colony algorithms will be evaluated to identify the best optimization technique that yields the ideal results.

 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}