A Fine Frequency Estimation Algorithm Based on Fast Orthogonal Search (FOS) for Base Station Positioning Receivers


Abstract
1. Introduction
2. System Model and Coarse Acquisition
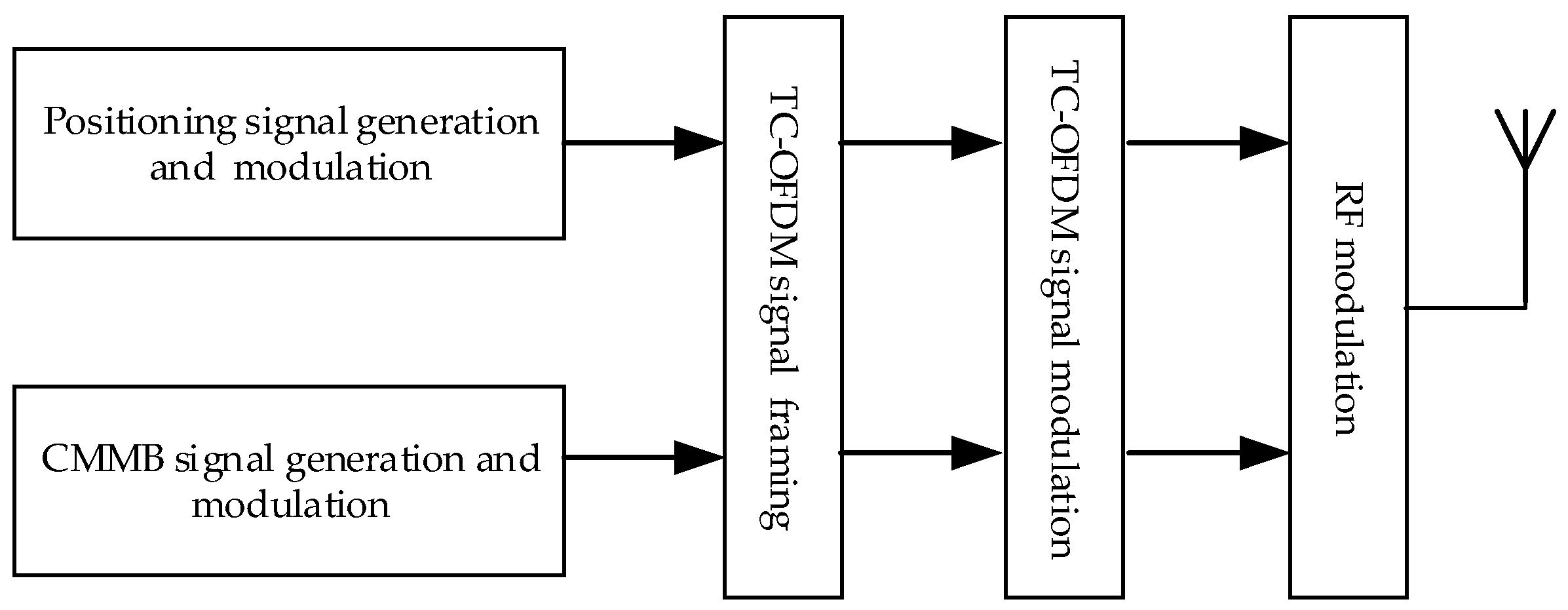
2.1. System Model
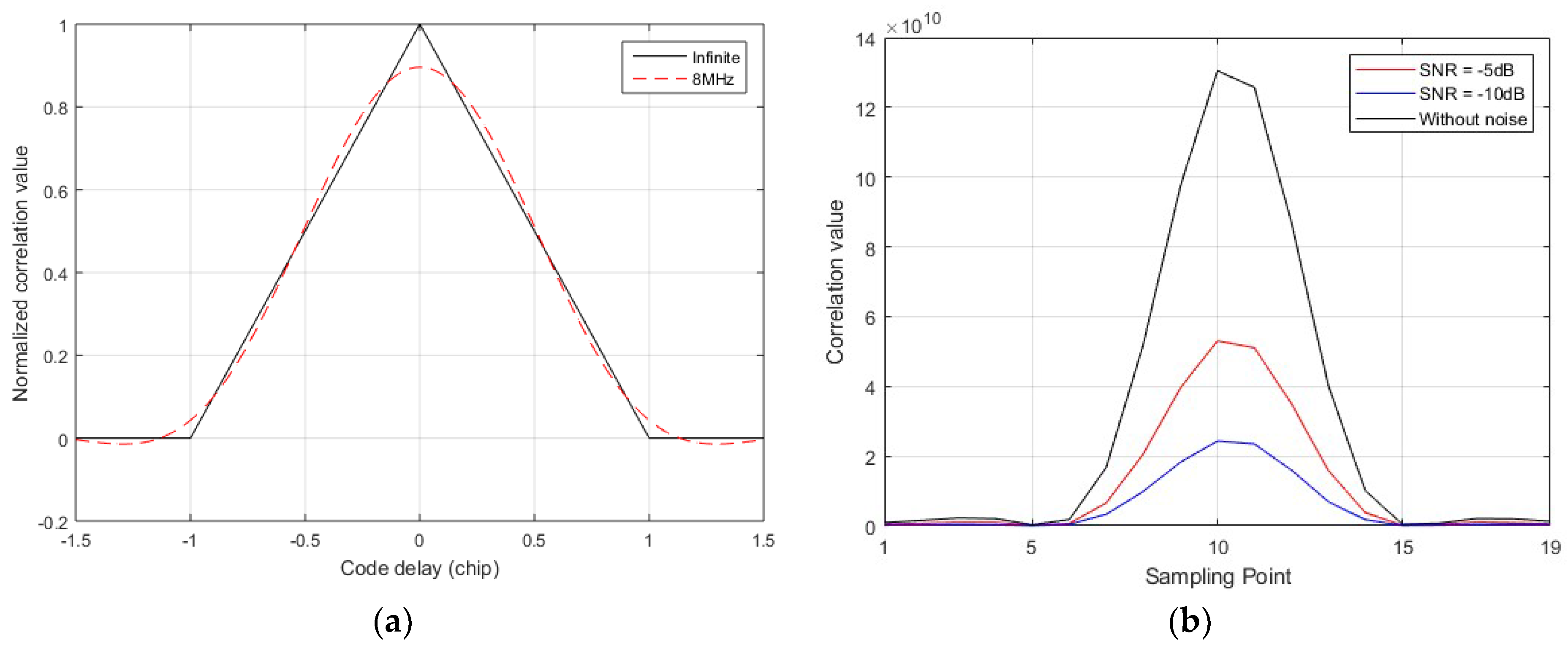
2.2. Coarse Acquisition
3. Proposed Fine Frequency Estimation Algorithm
3.1. Overview of the Proposed Algorithm
3.2. Coarse Acquisition
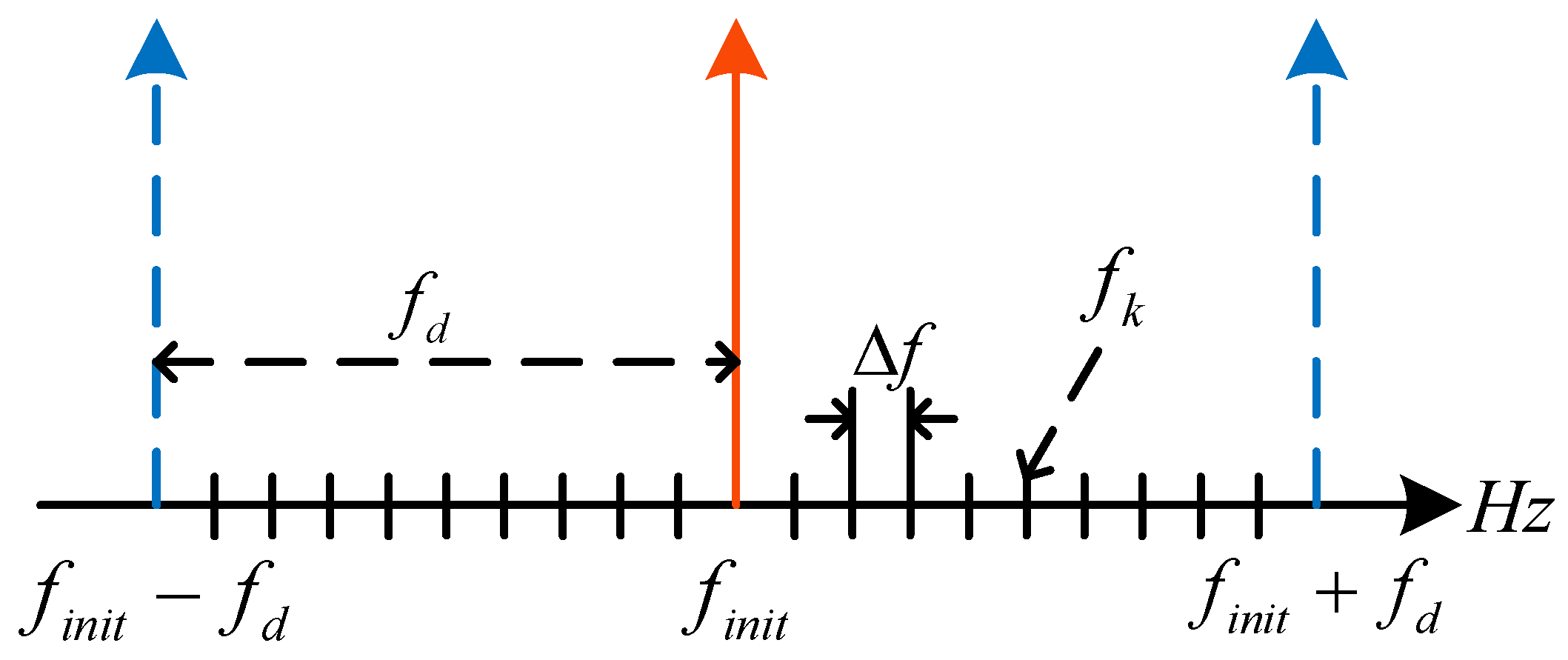
3.3. High Resolution Carrier Frequency Estimation
- (1)
- A certain maximum number of terms is fitted;
- (2)
- The predetermined threshold is higher than the ratio of MSE to the mean squared value of ; or
- (3)
- Adding another term to the model makes the MSE reduction less than adding WGN.
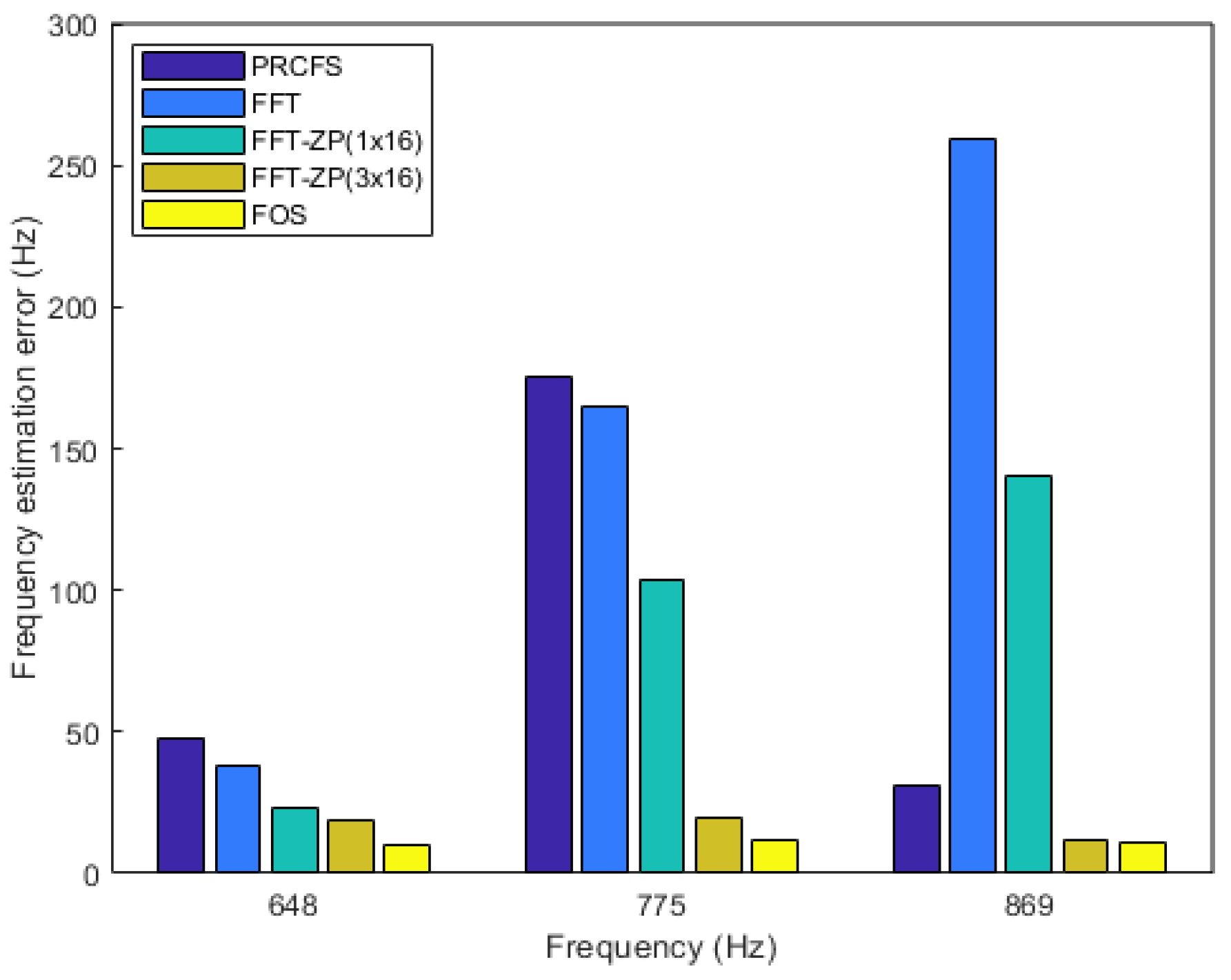
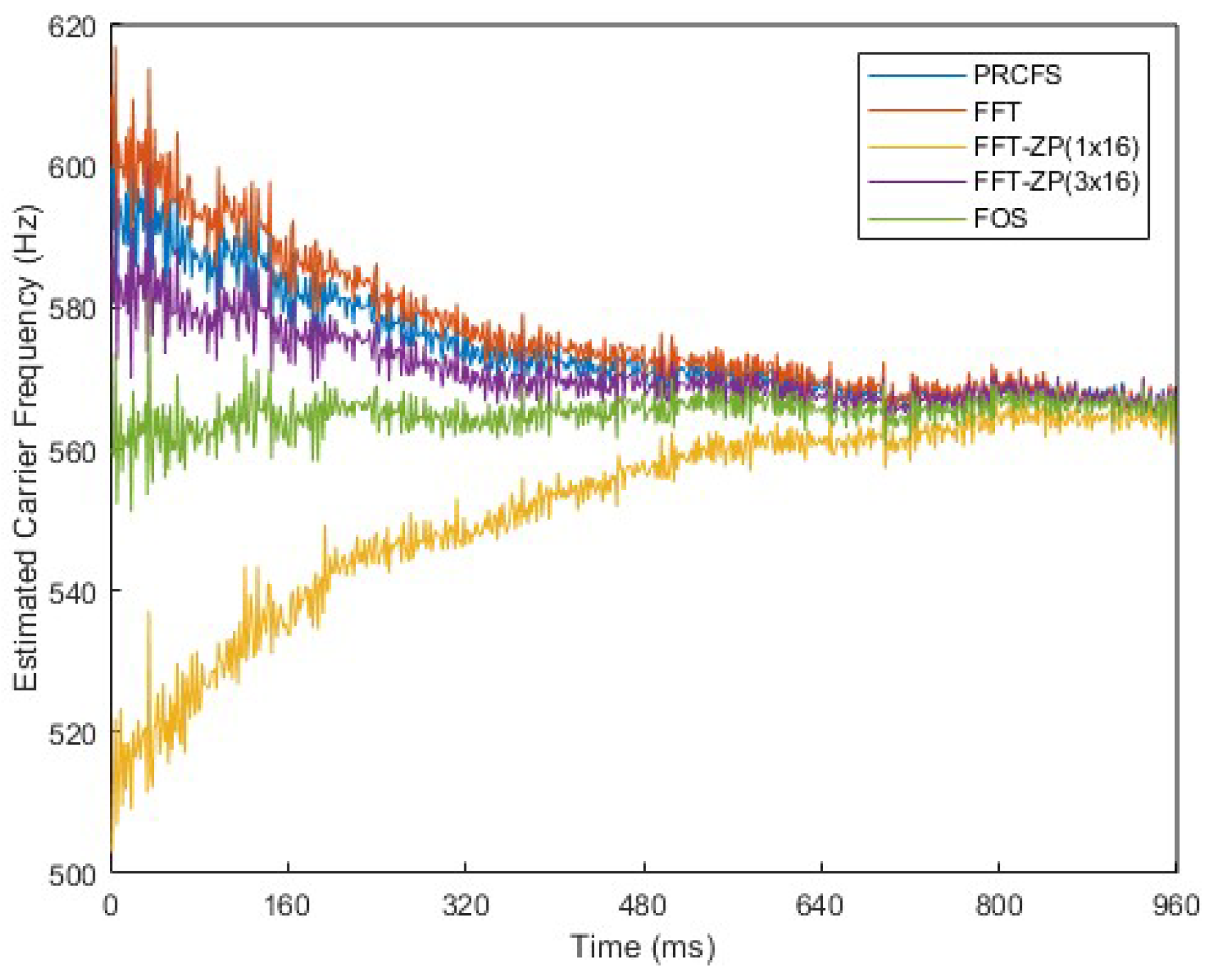
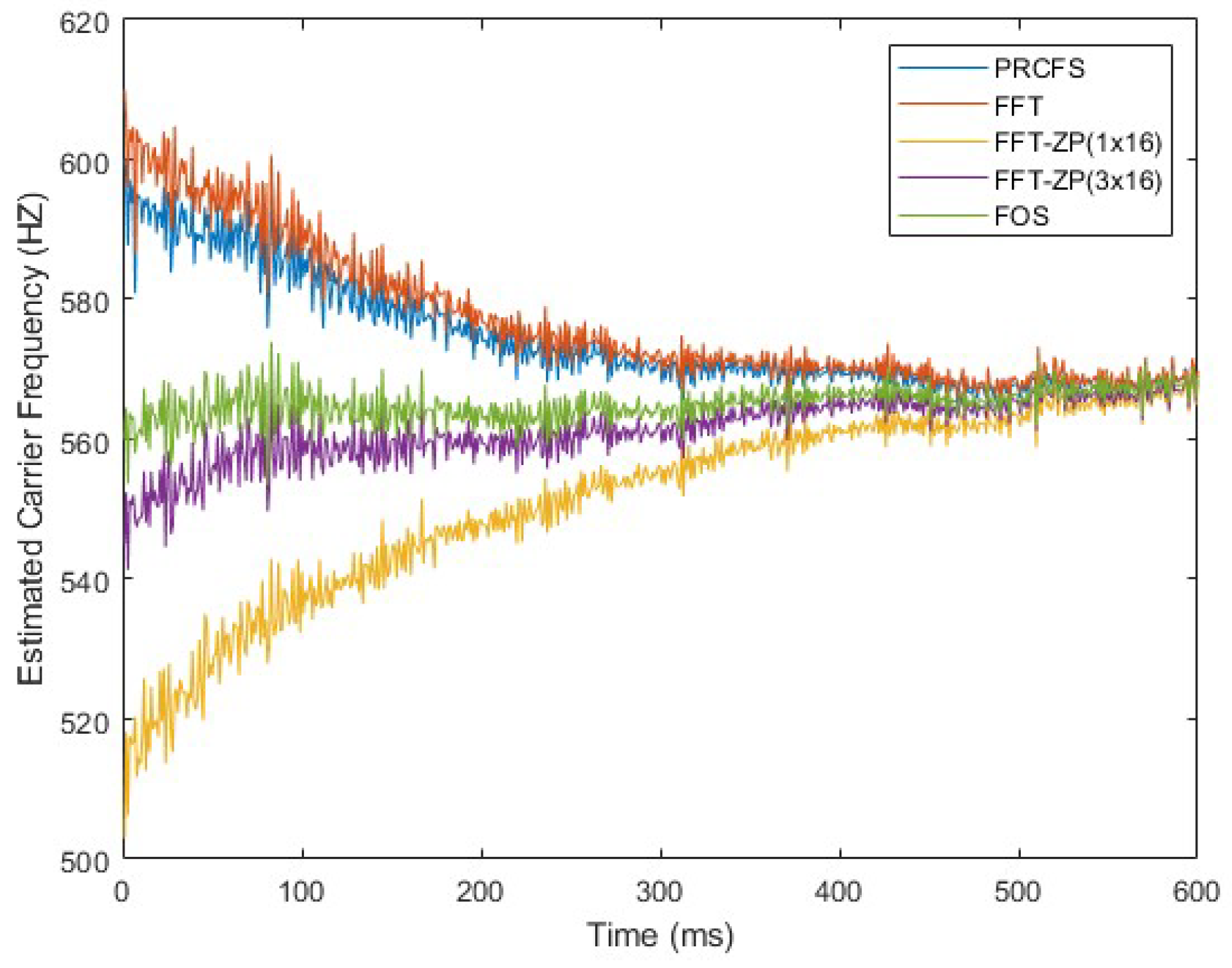
4. Performance and Analysis
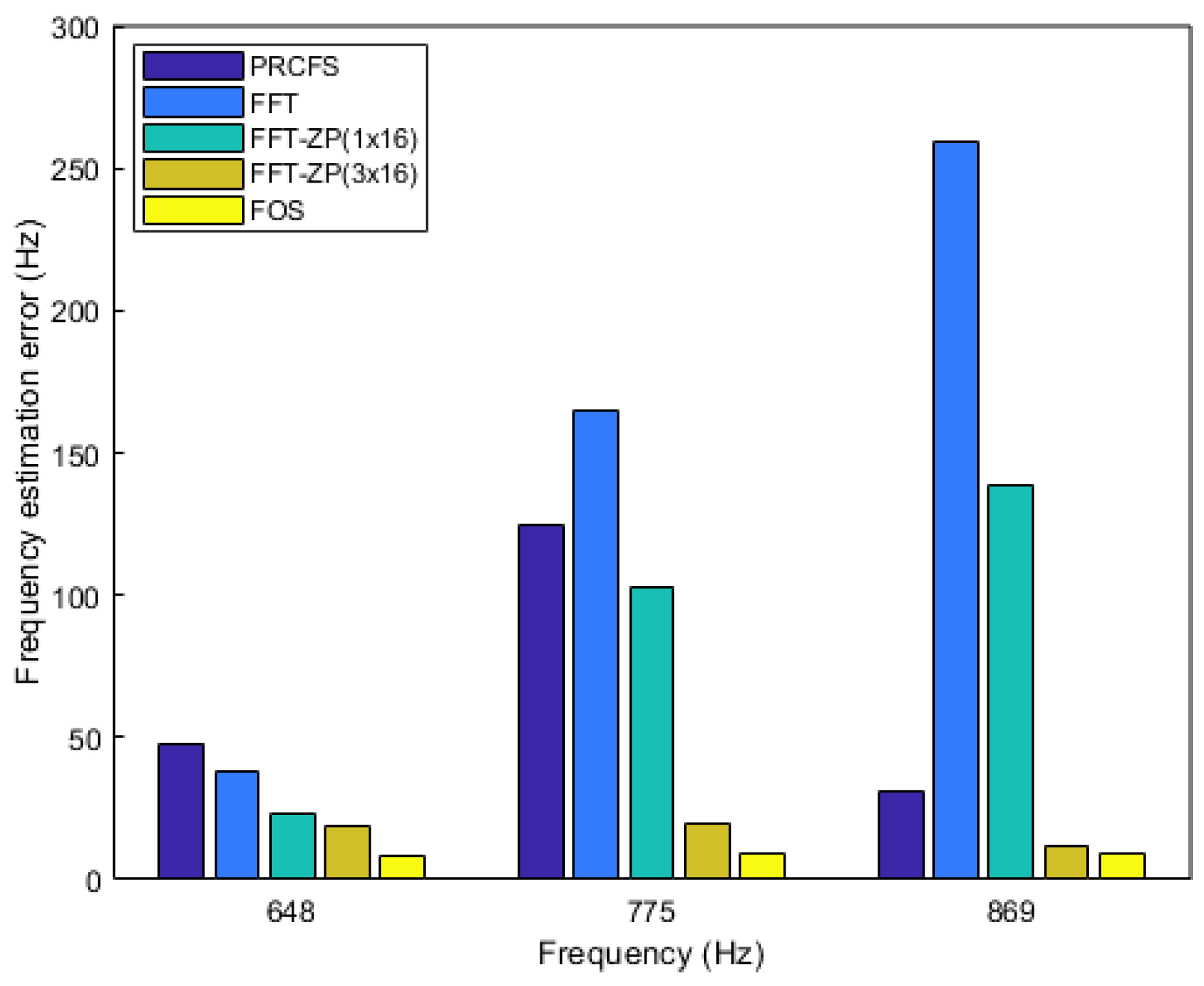
4.1. Simulations
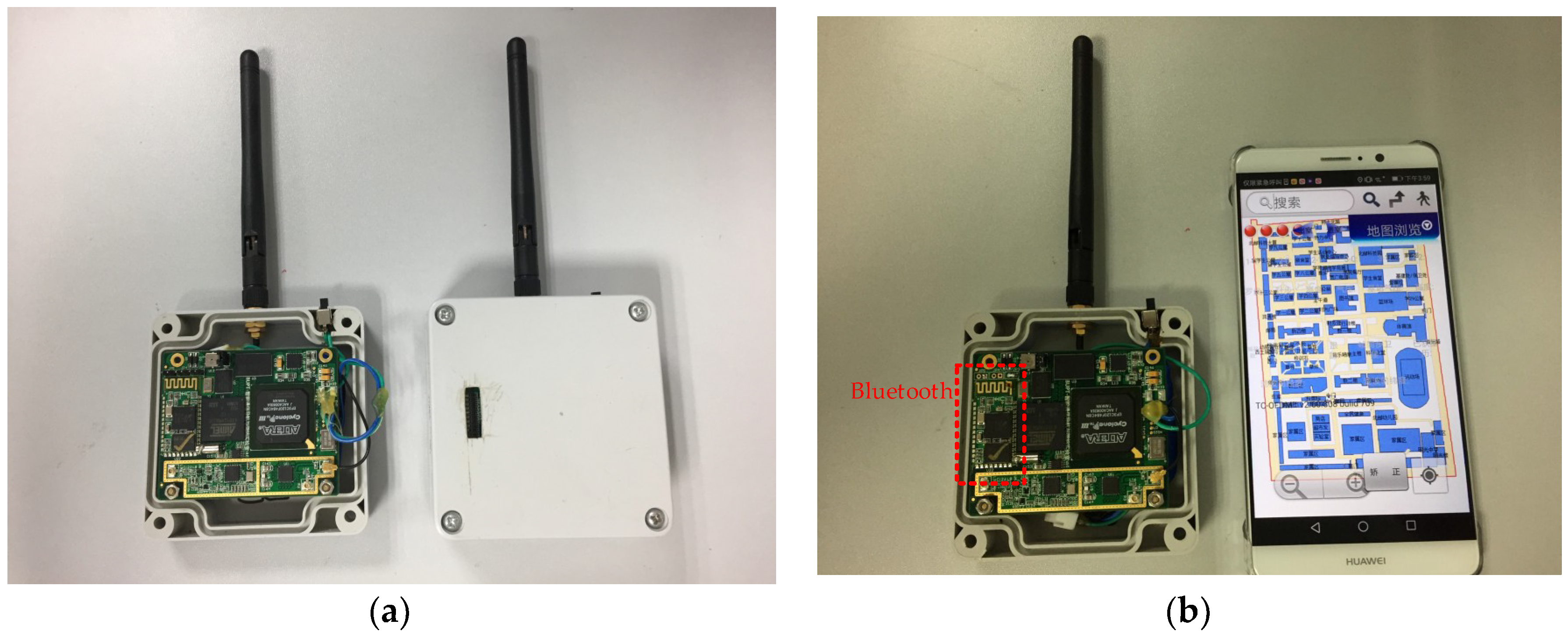
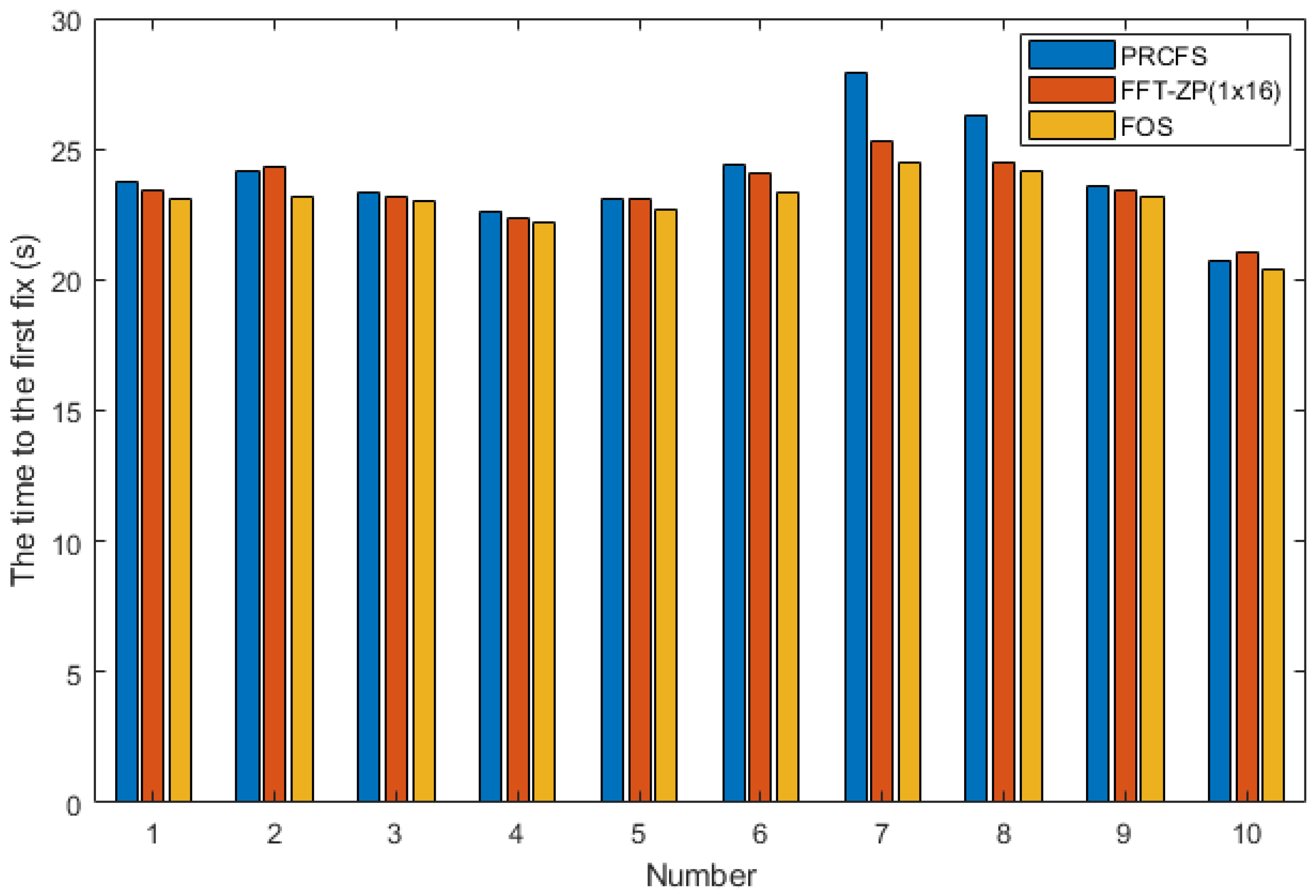
4.2. Experimental Tests
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, L.; Yang, L.; Yan, J.; Chen, R. Joint Wireless Positioning and Emitter Identification in DVB-T Single Frequency Networks. IEEE Trans. Broadcast. 2017, 63, 577–582. [Google Scholar] [CrossRef]
- Kong, S.; Kim, B. Error Analysis of the OTDOA from the Resolved First Arrival Path in LTE. IEEE Trans. Wirel. Commun. 2016, 15, 6598–6610. [Google Scholar] [CrossRef]
- Deng, Z.; Yu, Y.; Yuan, X.; Wan, N.; Yang, L. Situation and Development Tendency of Indoor Positioning. China Commun. 2013, 10, 42–55. [Google Scholar] [CrossRef]
- Deng, Z.; Mo, J.; Jia, B.; Bian, X. A Pseudorange Measurement Scheme Based on Snapshot for Base Station Positioning Receivers. Sensors 2017, 17, 2783. [Google Scholar]
- GY/T 220.7-2008. Mobile Multimedia Broadcasting (PR China) Part 7: Technical Specifications for Receiving and Decoding Terminal; The State Administration of Radio, Film, and Television of China: Beijing, China, 2008. [Google Scholar]
- GY/T220.1-2006. Mobile Multimedia Broadcasting (PR China) Part 1: Framing Structure, Channel Coding and Modulation for Broadcasting Channel; The State Administration of Radio, Film, and Television of China: Beijing, China, 2006. [Google Scholar]
- Zhu, C.; Fan, X. A Novel Method to Extend Coherent Integration for Weak GPS Signal Acquisition. IEEE Commun. Lett. 2015, 19, 1343–1346. [Google Scholar] [CrossRef]
- Mo, J.; Deng, Z.; Jiao, J.; Jiang, S.; Yu, S.; Xu, F. Weak Signal Acquisition Algorithm for Indoor Positioning Receiver. In Proceedings of the 7th China Satellite Navigation Conference, Changsha, China, 18–20 May 2016. [Google Scholar]
- Deng, Z.; Yuan, X.; Yu, Y.; Lv, Z. A Method and Realization of Parallel Residual Carrier Frequency Searching for Base Station Positioning System. In Proceedings of the 8th International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–23 September 2012. [Google Scholar]
- Wang, K.; Jiang, R.; Li, Y.; Zhang, N. A New Algorithm for Fine Acquisition of GPS Carrier Frequency. GPS Solut. 2014, 18, 581–592. [Google Scholar] [CrossRef]
- Wu, J.; Hu, Y. The Study on GPS Signal Acquisition Algorithm in Time Domain. In Proceedings of the 4th International Conference on Wireless Communications, Networking and Mobile Computing, Dalian, China, 12–14 October 2008. [Google Scholar]
- Tamazin, M.; Noureldin, A.; Korenberg, M.J.; Massoud, A. Robust Fine Acquisition Algorithm for GPS Receiver with Limited Resources. GPS Solut. 2016, 20, 77–88. [Google Scholar] [CrossRef]
- Zhong, H.; Ba, X.; Chen, J.; Zhou, H. FFT-based Fine Frequency Estimation for Weak GPS Signal. J. Electron. Inf. Technol. 2015, 37, 2132–2137. [Google Scholar]
- Curran, J.; Lachapelle, G.; Murphy, C. Improving the Design of Frequency Lock Loops for GNSS Receivers. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 850–868. [Google Scholar] [CrossRef]
- Sagiraju, P.; Akopian, D.; Valio, A. Fine Frequency Estimation in Weak Signals for GPS Receivers. In Proceedings of the ION NTM Conference, Monterey, CA, USA, 18–20 January 2006. [Google Scholar]
- Yichao, G.; Huan, H.; Ran, T.; Yue, W. Weak DSSS Signal Acquisition with Fine Doppler Frequency Estimation. Electron. Lett. 2018, 54, 79–81. [Google Scholar]
- Xiang, J.; Wei, C.; Shen, Q. Flexible and Accurate Frequency Estimation for Complex Sinusoid Signal by Interpolation Using DFT Samples. Chin. J. Electron. 2018, 27, 109–114. [Google Scholar] [CrossRef]
- Wang, H.; Jian-Hua, G.E.; Hu, J.; Ai, B. An Efficient OFDM Timing Synchronization for CMMB System. IEICE Trans. Commun. 2012, 95, 3786–3792. [Google Scholar] [CrossRef]
- El-Shafie, A.; Noureldin, A.; McGaughey, D.; Hussain, A. Fast Orthogonal Search (FOS) Versus Fast Fourier Transform (FFT) as Spectral Model Estimations Techniques Applied for Structural Health Monitoring (SHM). Struct. Multidiscip. Optim. 2012, 45, 503–513. [Google Scholar] [CrossRef]
- Korenberg, M.J. Identifying Nonlinear Difference Equation and Functional Expansion Representations: The Fast Orthogonal Algorithm. Ann. Biomed. Eng. 1988, 16, 123–142. [Google Scholar] [CrossRef] [PubMed]
- Korenberg, M.J.; Paarmann, L. Applications of Fast Orthogonal Search: Time-Series Analysis and Resolution of Signals in Noise. Ann. Biomed. Eng. 1989, 17, 219–231. [Google Scholar] [CrossRef] [PubMed]
- McGaughey, D.R.; Tarbouchi, M.; Nutt, K.; Chikhani, A. Speed Sensorless Estimation of AC Induction Motors Using the Fast Orthogonal Search Algorithm. IEEE Trans. Energy Convers. 2006, 21, 112–120. [Google Scholar] [CrossRef]
- Kaplan, E.; Christopher, J. Understanding GPS. Principles and Applications, 2nd ed.; Artech House: Norwood, MA, USA, 2006; pp. 166–173. [Google Scholar]
- Tang, X.; Falletti, E.; Presti, L. Fine Doppler Frequency Estimation in GNSS Signal Acquisition Process. In Proceedings of the Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing, Noordwijk, The Netherlands, 5–7 December 2012. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Slot time, | 25 ms |
| The time of short codes, | 0.136 ms |
| Bandwidth, | 8 MHz |
| code rate, | 5 MHz |
| Sampling frequency, | 22 MHz |
| Intermediate frequency, | 0 Hz |
| Residual carrier frequency, | 567 Hz, 648 Hz, 767 Hz, 775 Hz, 869 Hz |
| Signal length | 10 slot times |
| SNR | −25 dB, −30 dB |
| The noise bandwidth of FLL | 5 Hz |
| The noise bandwidth of PLL | 10 Hz |
| Navigation message bits | 800 bits |
| Method | PRCFS | FFT | FFT-ZP (1 × 16) | FFT-ZP (3 × 16) | FOS |
|---|---|---|---|---|---|
| SD (Hz) | 22.554 | 24.084 | 11.492 | 9.634 | 9.627 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Z.; Mo, J.; Jia, B.; Bian, X. A Fine Frequency Estimation Algorithm Based on Fast Orthogonal Search (FOS) for Base Station Positioning Receivers. Electronics 2018, 7, 376. https://doi.org/10.3390/electronics7120376
Deng Z, Mo J, Jia B, Bian X. A Fine Frequency Estimation Algorithm Based on Fast Orthogonal Search (FOS) for Base Station Positioning Receivers. Electronics. 2018; 7(12):376. https://doi.org/10.3390/electronics7120376
Chicago/Turabian StyleDeng, Zhongliang, Jun Mo, Buyun Jia, and Xinmei Bian. 2018. "A Fine Frequency Estimation Algorithm Based on Fast Orthogonal Search (FOS) for Base Station Positioning Receivers" Electronics 7, no. 12: 376. https://doi.org/10.3390/electronics7120376
APA StyleDeng, Z., Mo, J., Jia, B., & Bian, X. (2018). A Fine Frequency Estimation Algorithm Based on Fast Orthogonal Search (FOS) for Base Station Positioning Receivers. Electronics, 7(12), 376. https://doi.org/10.3390/electronics7120376