Comparative Analysis of Two and Four Current Loops for Vector Controlled Dual-Three Phase Permanent Magnet Synchronous Motor

 ,
, 


Abstract
:1. Introduction
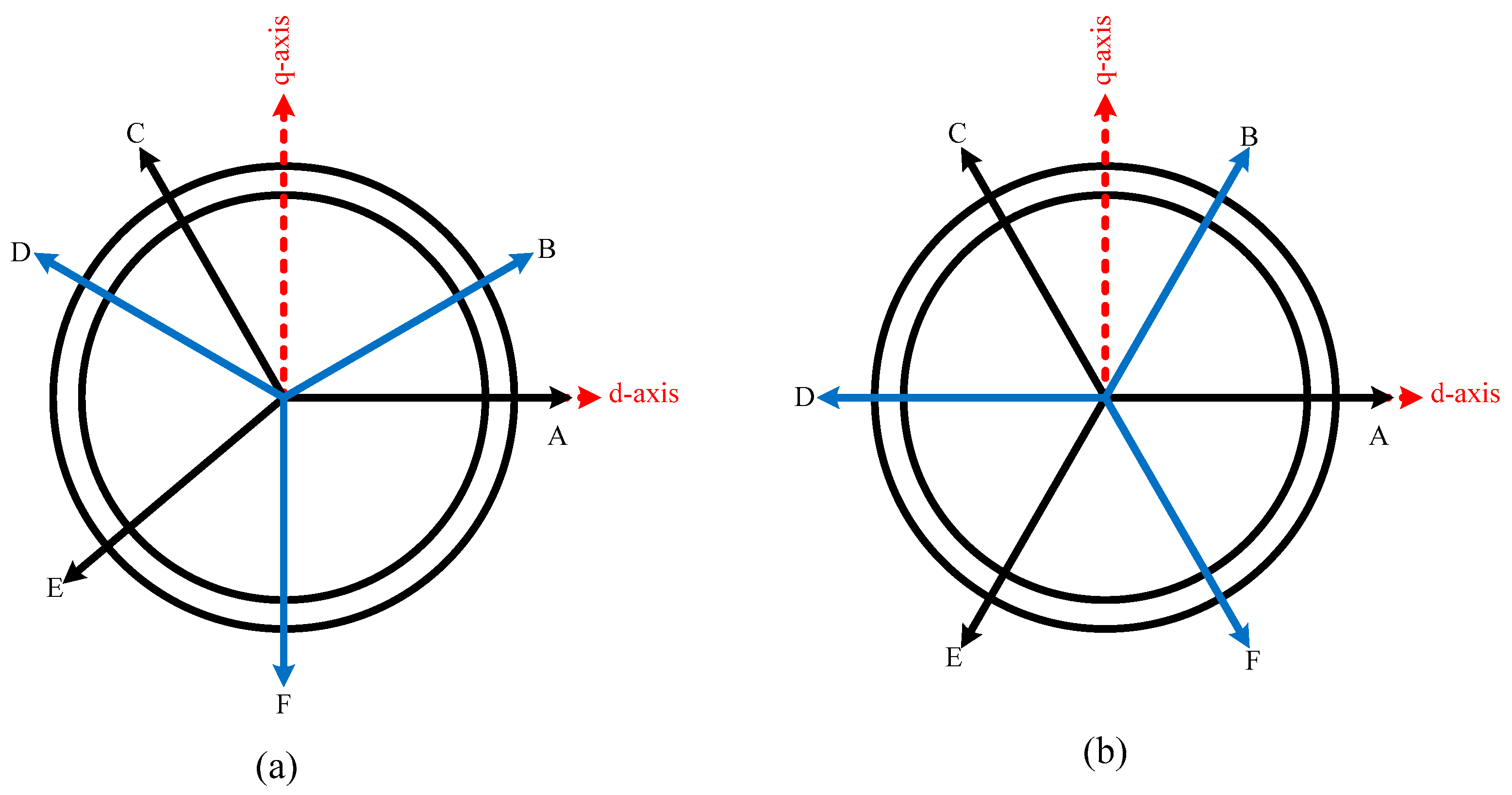
2. Space Vector Decomposition and Machine Model
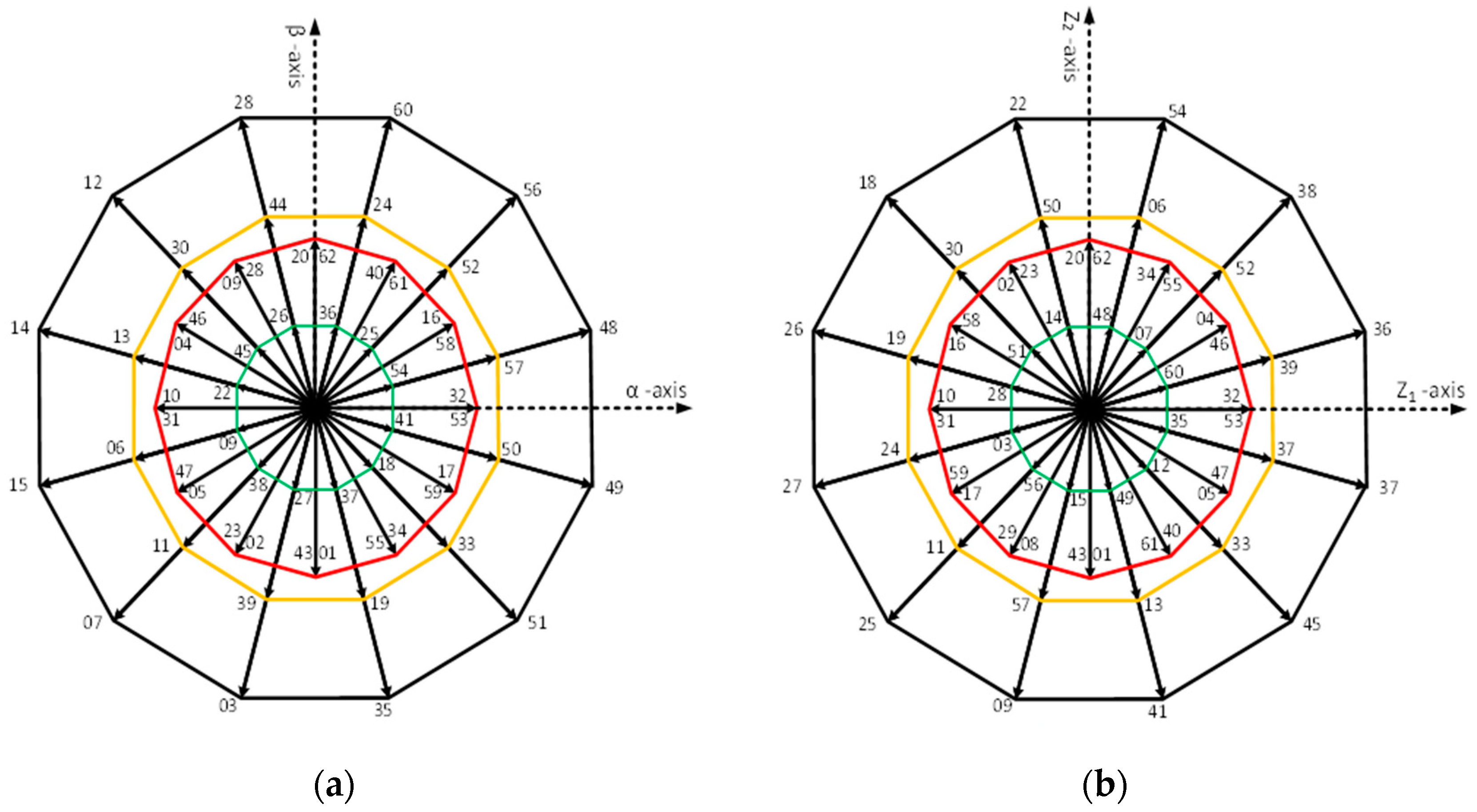
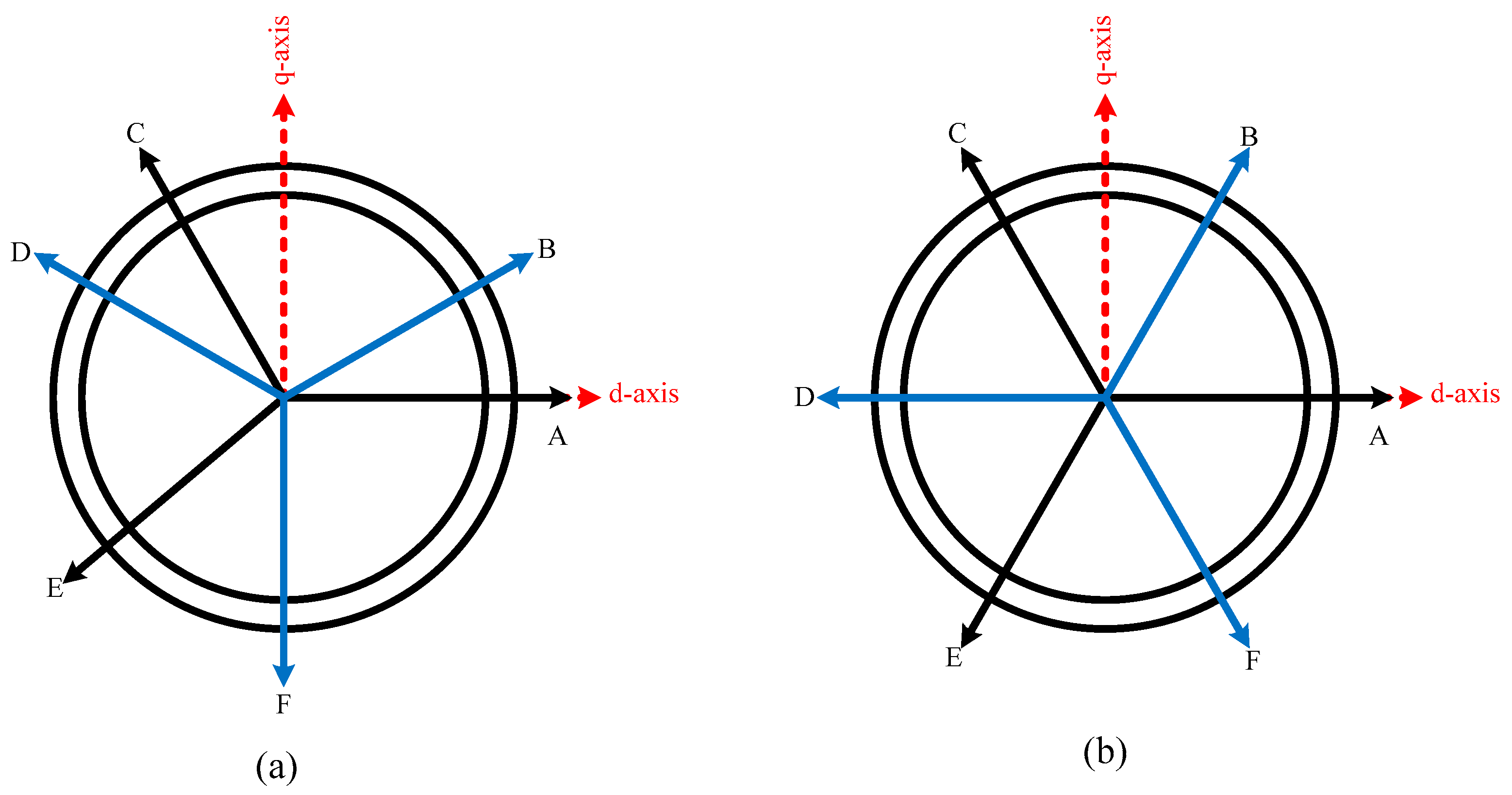
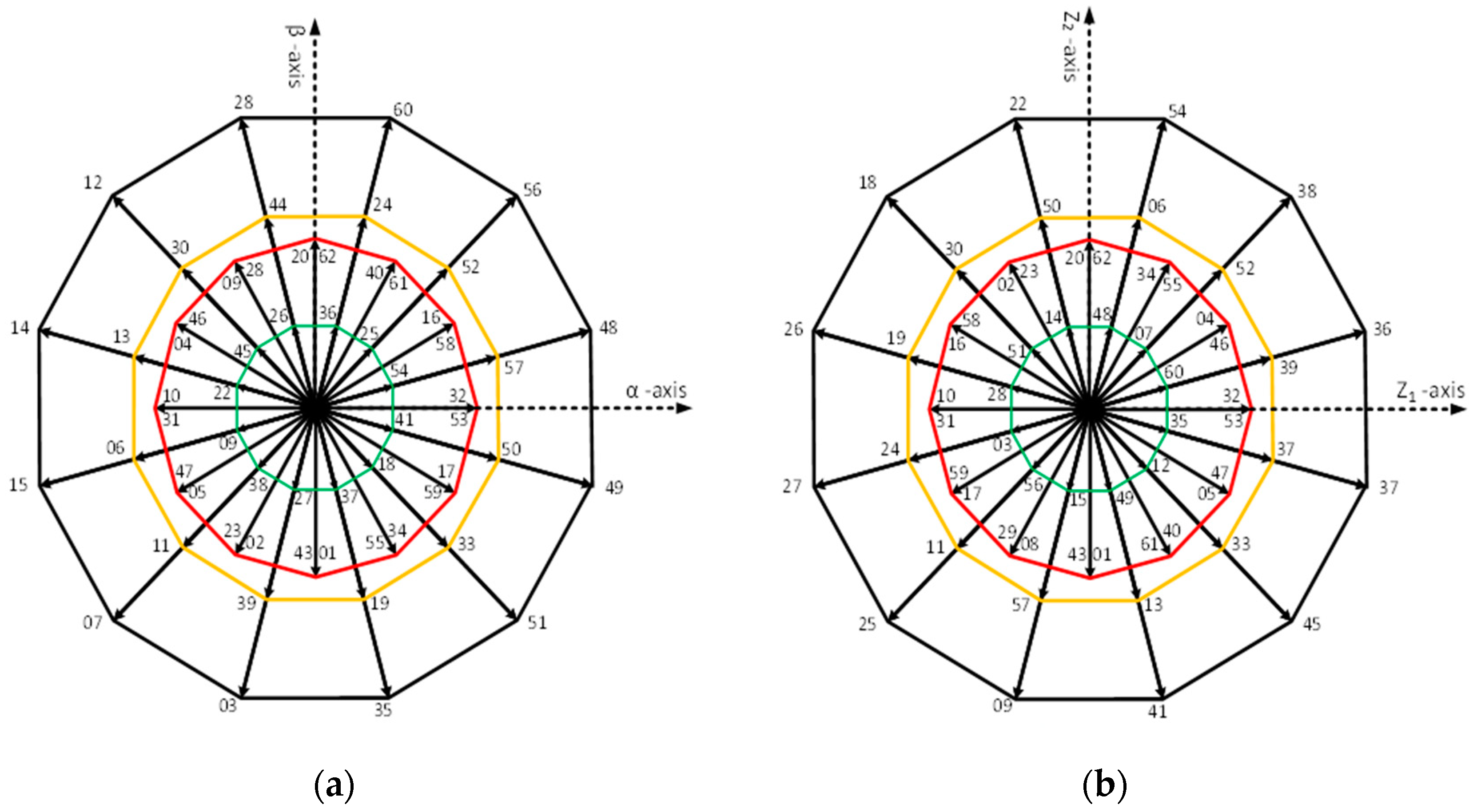
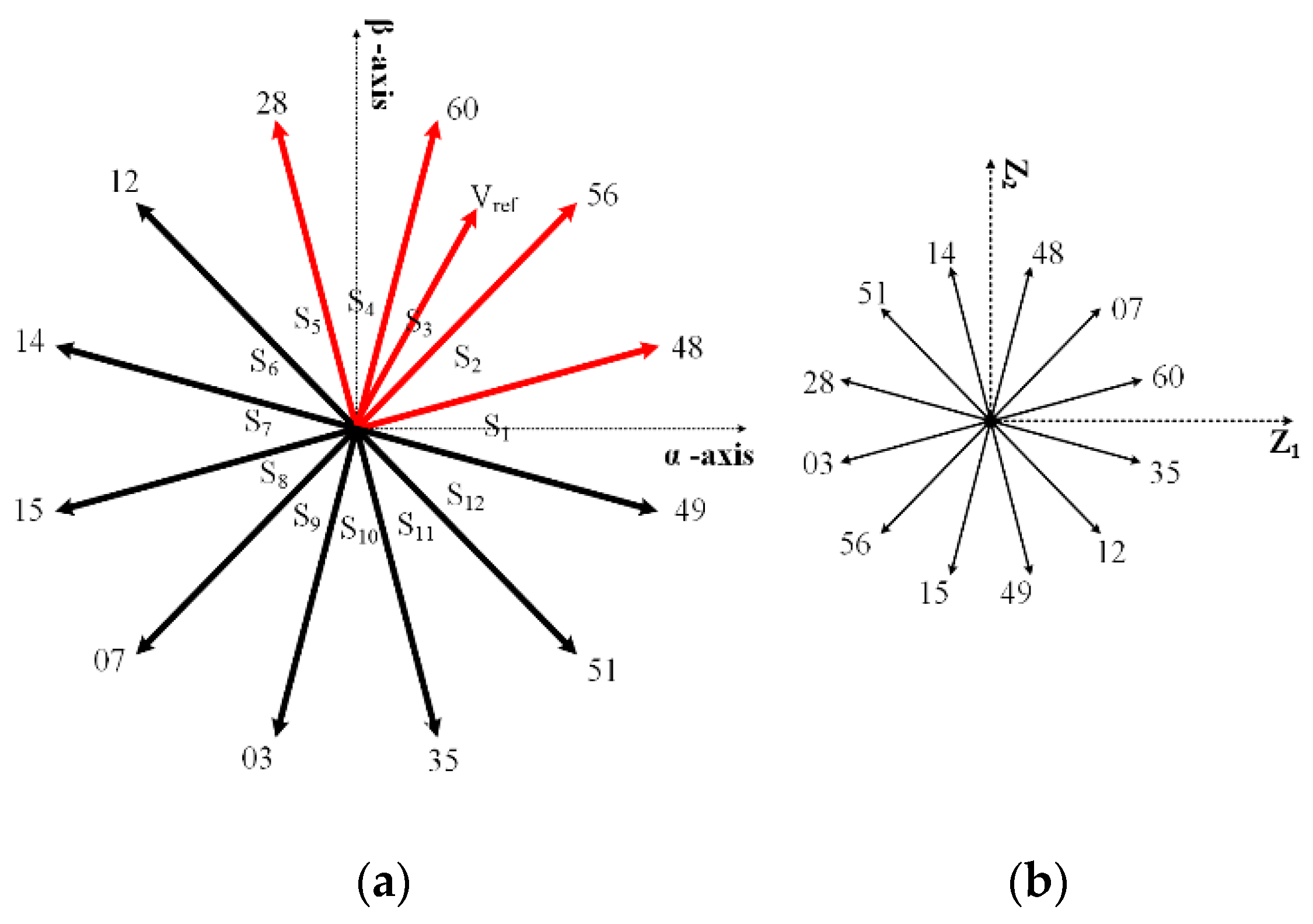
2.1. Space Vector Decomposition
- Fundamental machine constituents and harmonics of order k = 12m ± 1 where (m = 1, 2, 3......) are mapped on the αβ-plane.
- Harmonic components with order k = 6m ± 1 where (m = 1, 3, 5......) are mapped into Z1Z2-subspace or on Z1Z2-plane.
- Harmonic components with order k = 3m where (m = 1, 3, 5......) are mapped into O1O2-subspace or on O1O2-plane. The harmonics components mapped into this plane are considered as non-electromechanical energy conversion components and form the zero-sequence components.
2.2. Machine Model in Stationary Frame
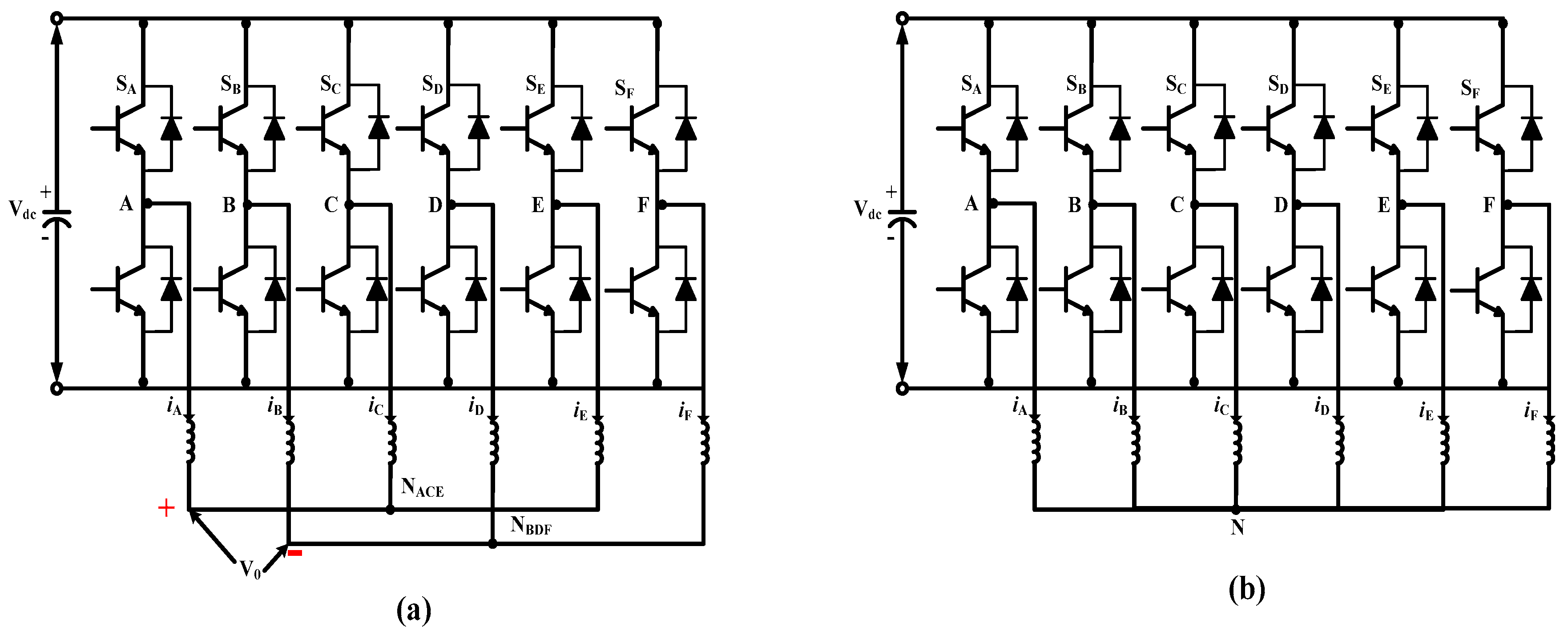
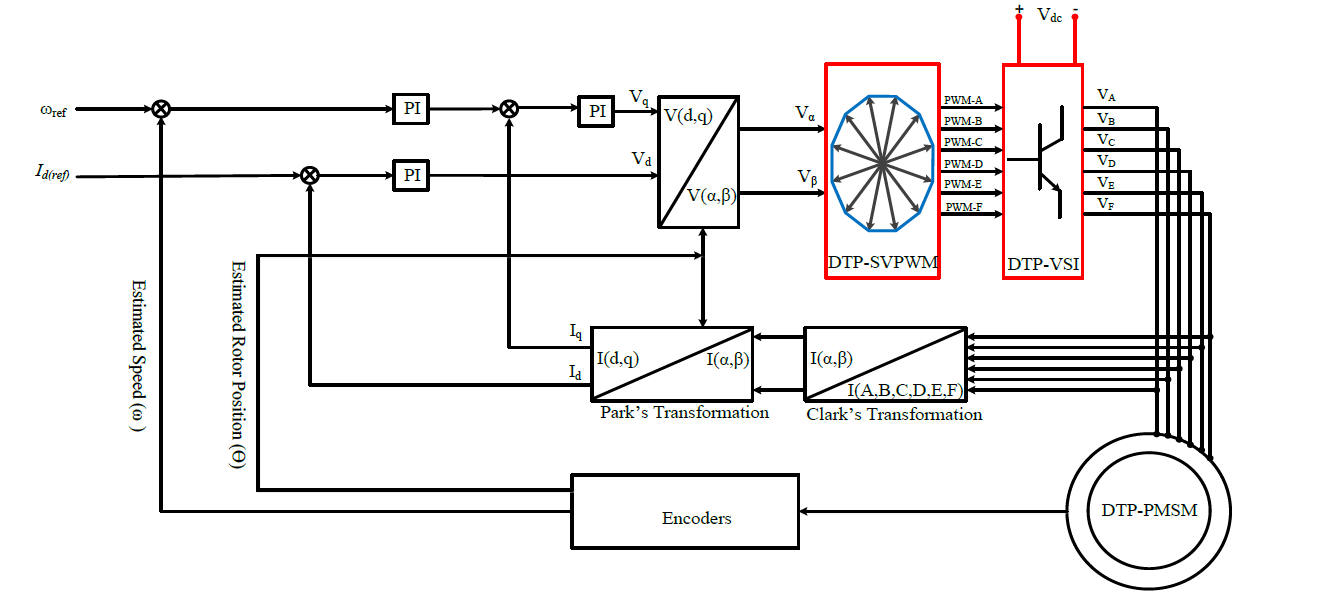
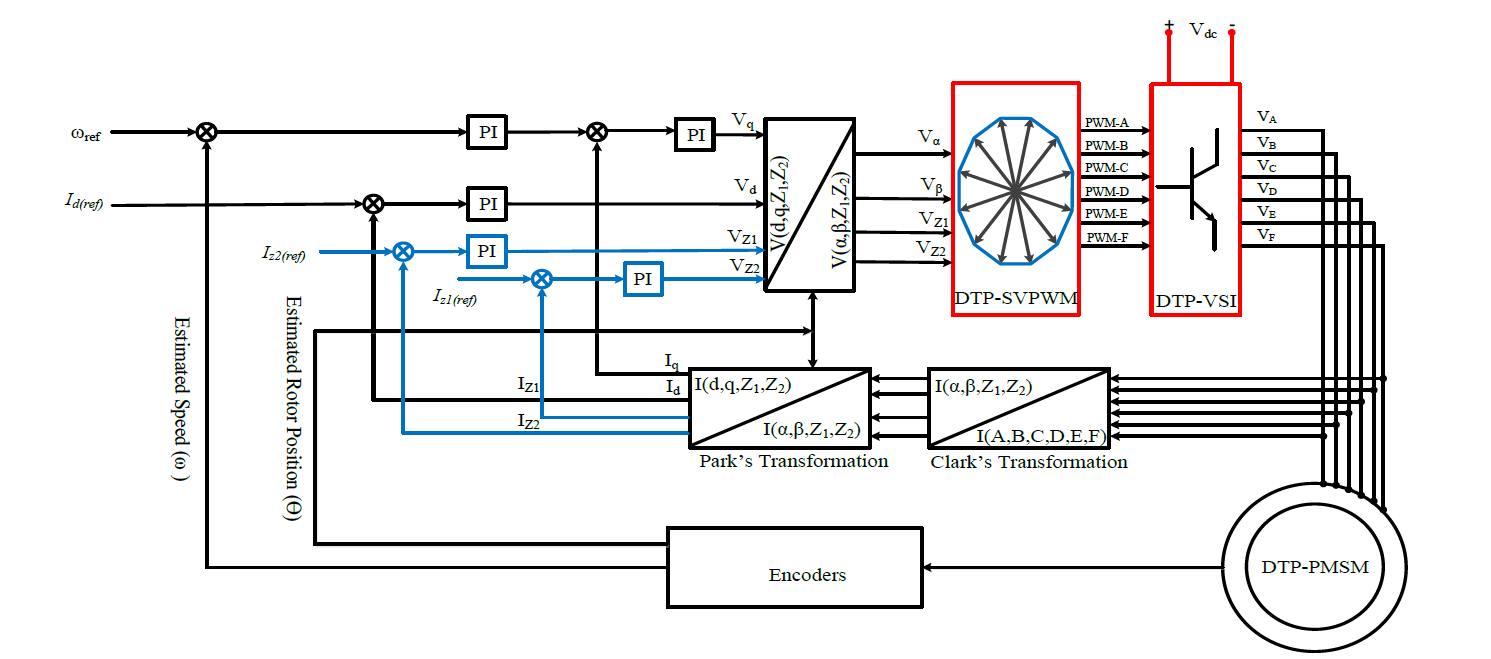
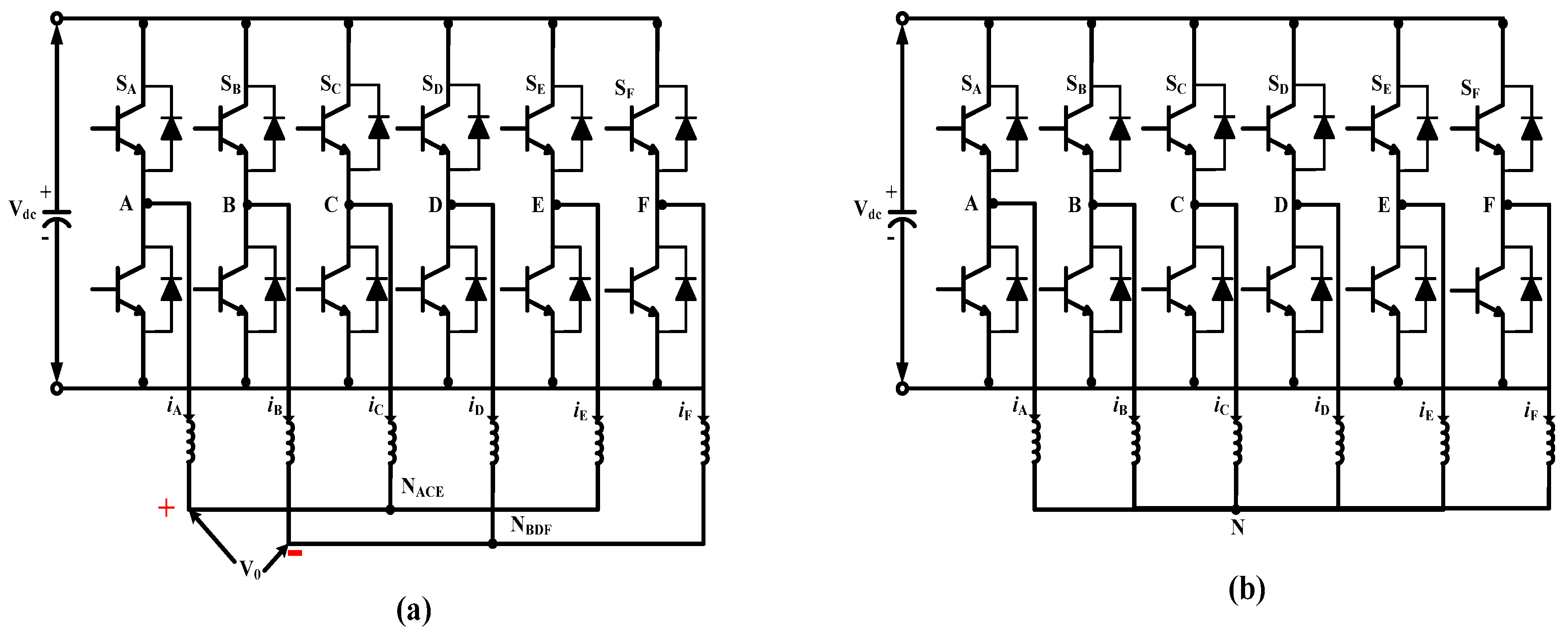
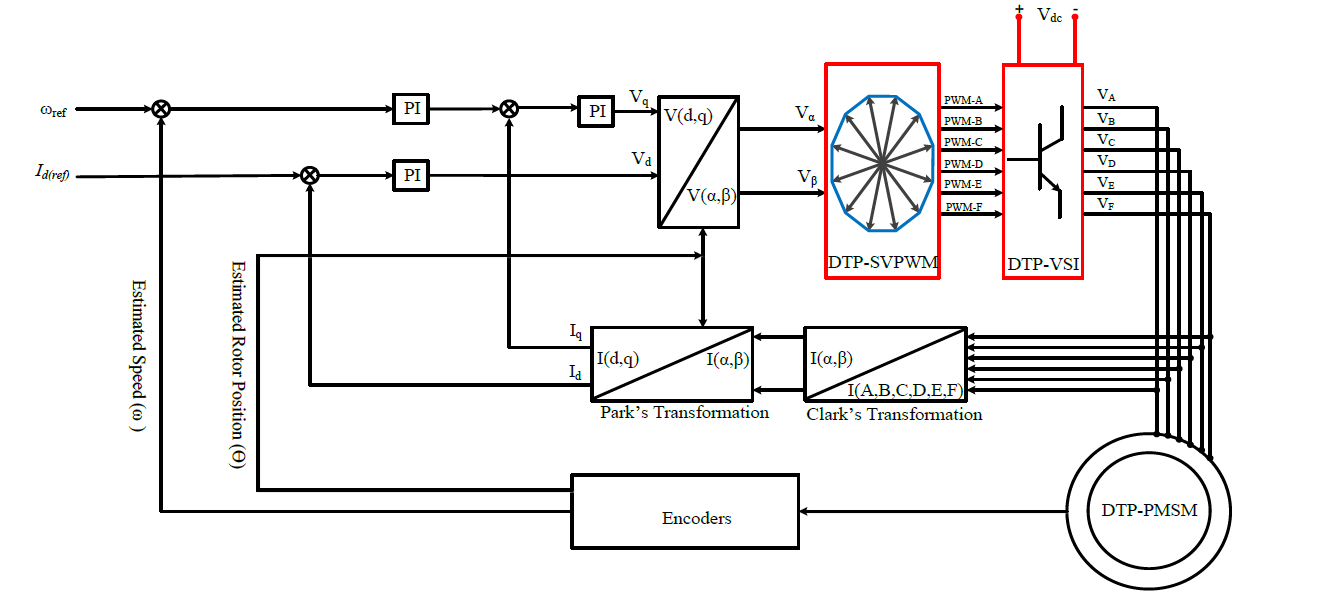
3. Vector Control of Dual-Three Phase PMSMs
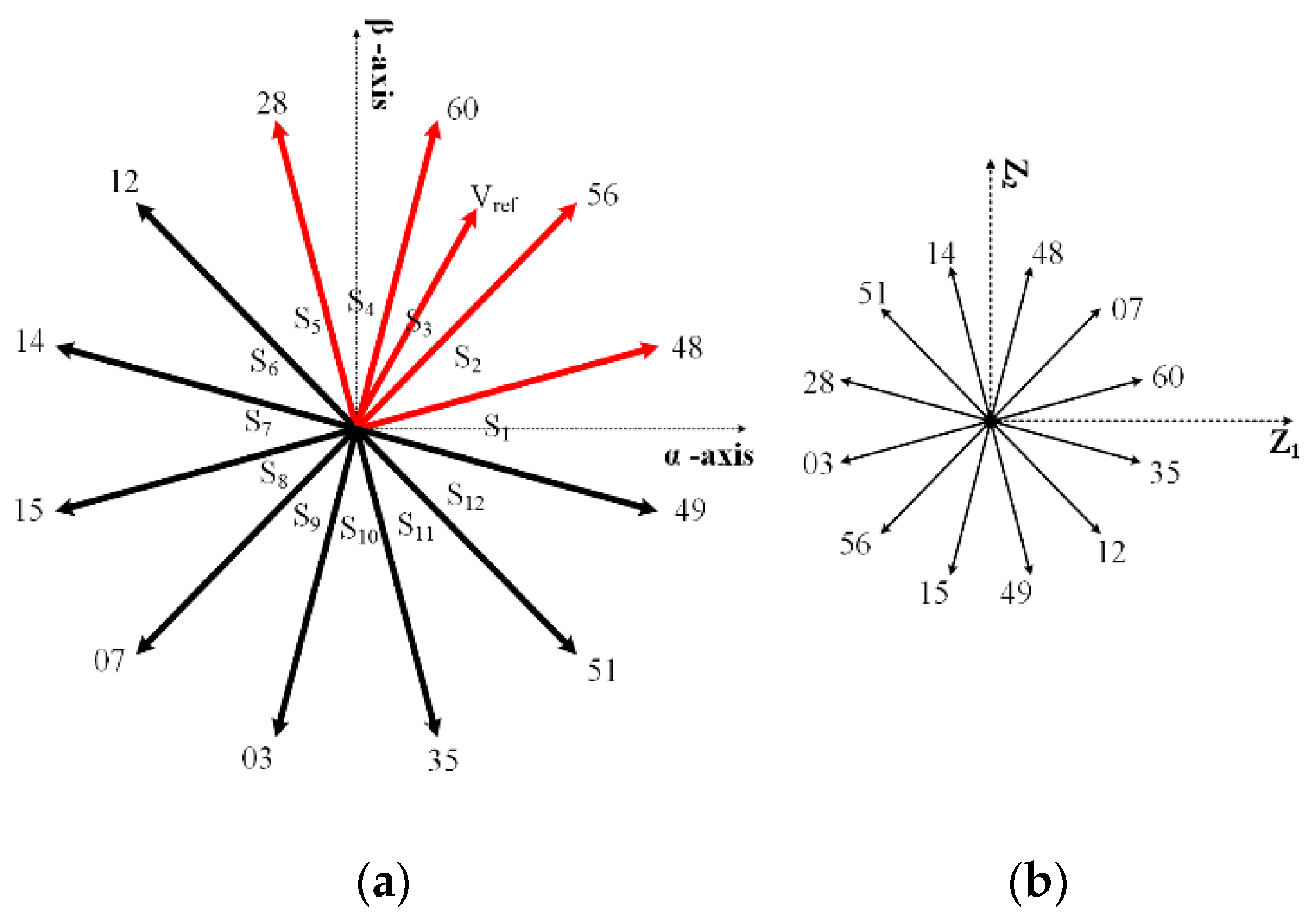
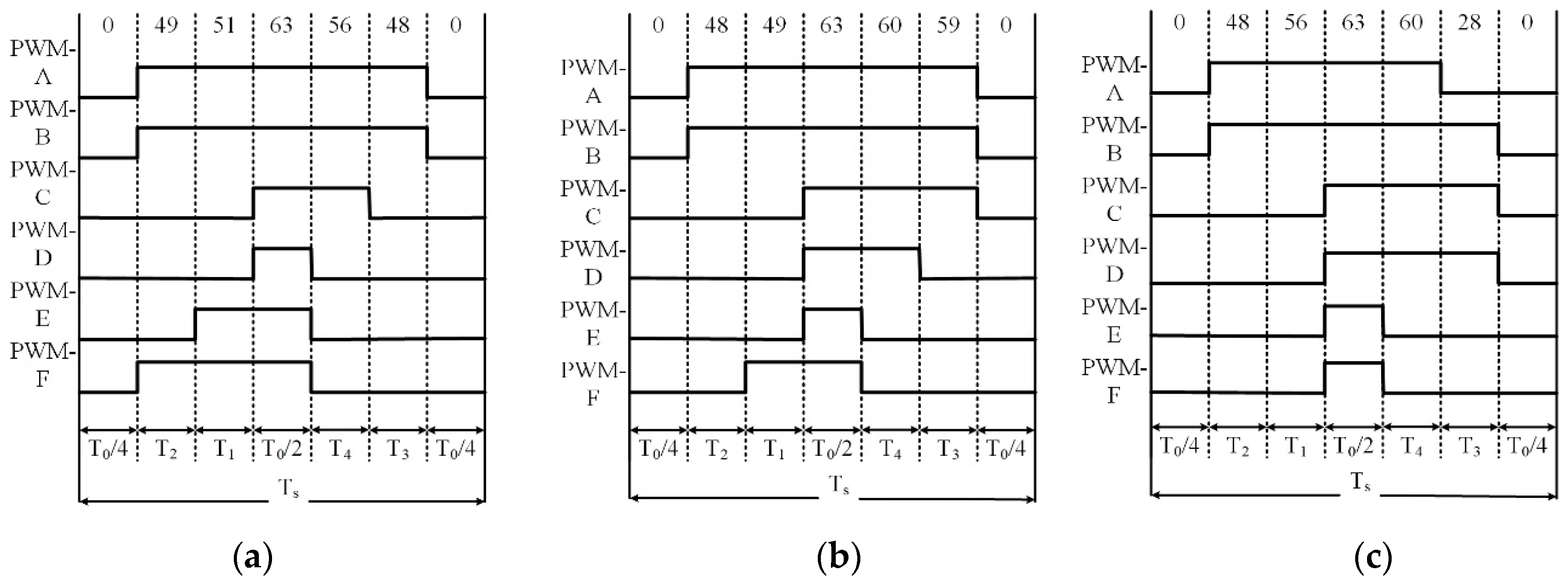
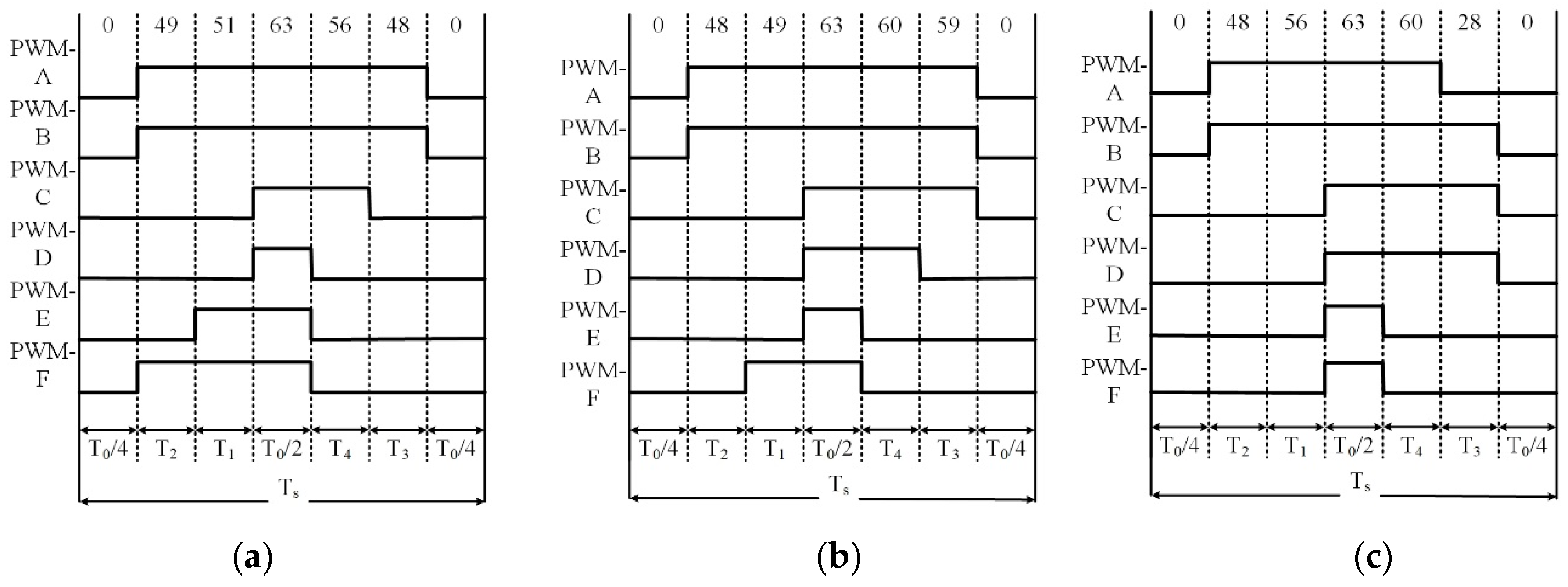
Space Vector PWM Control Strategy
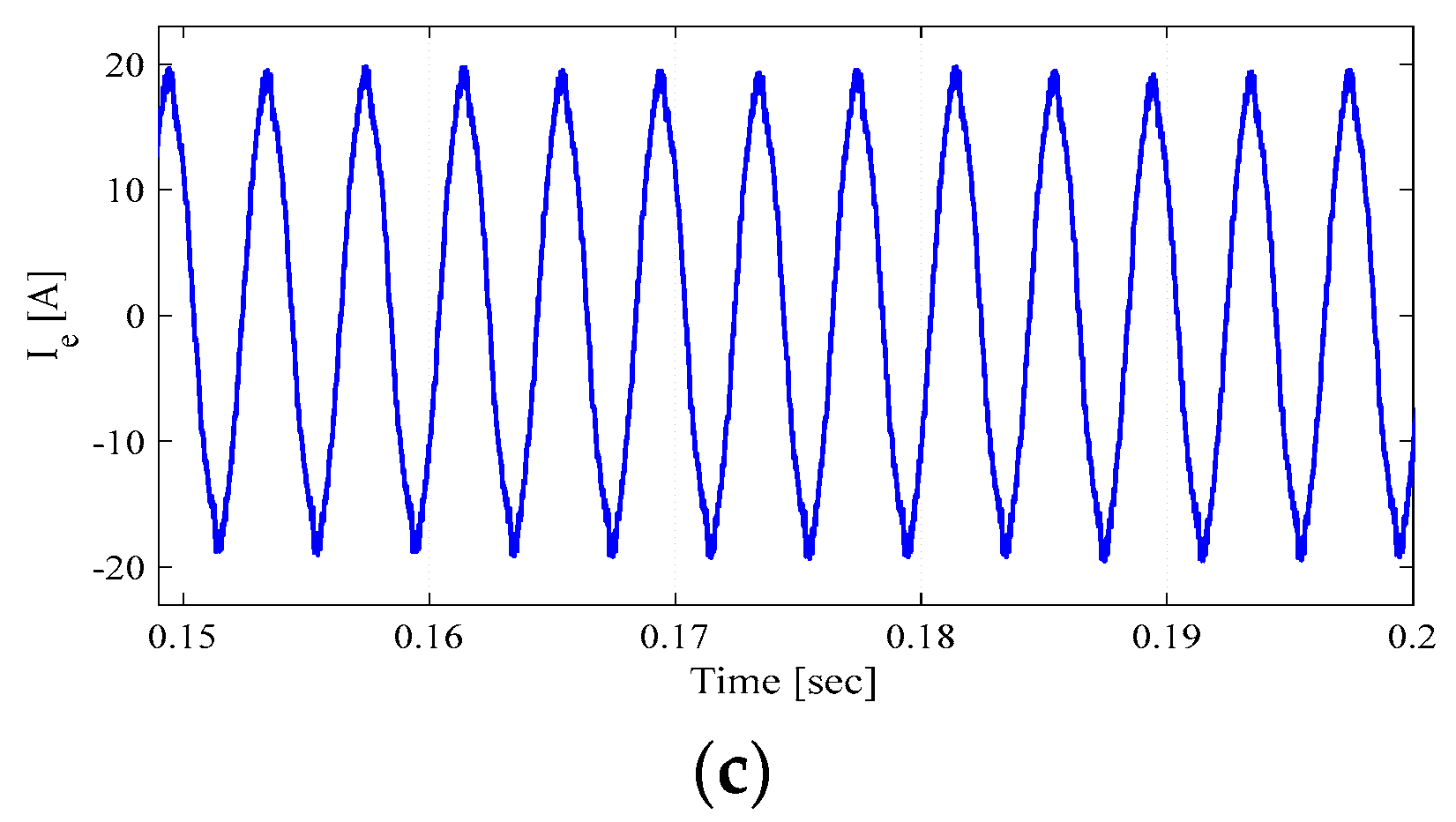
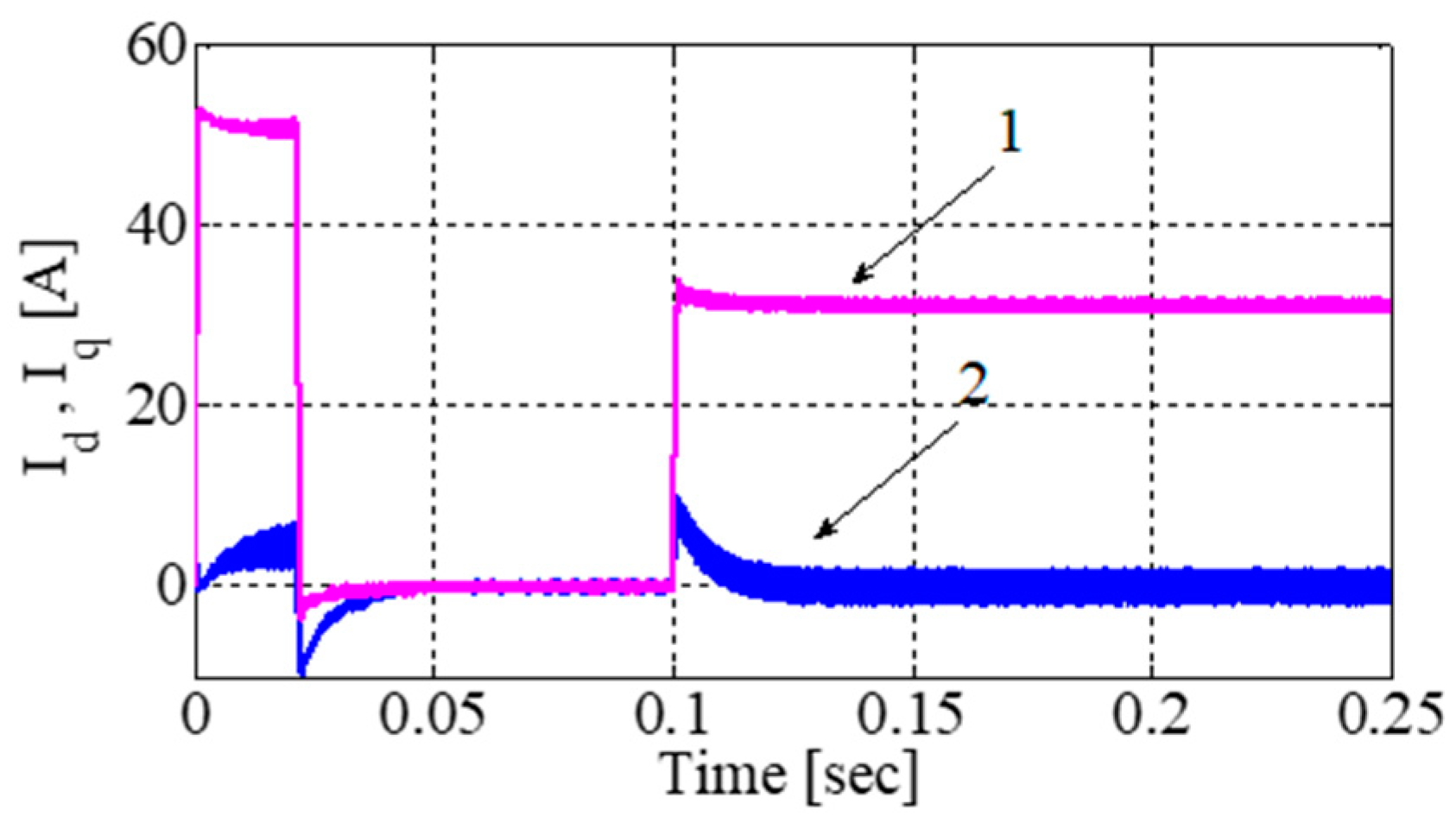
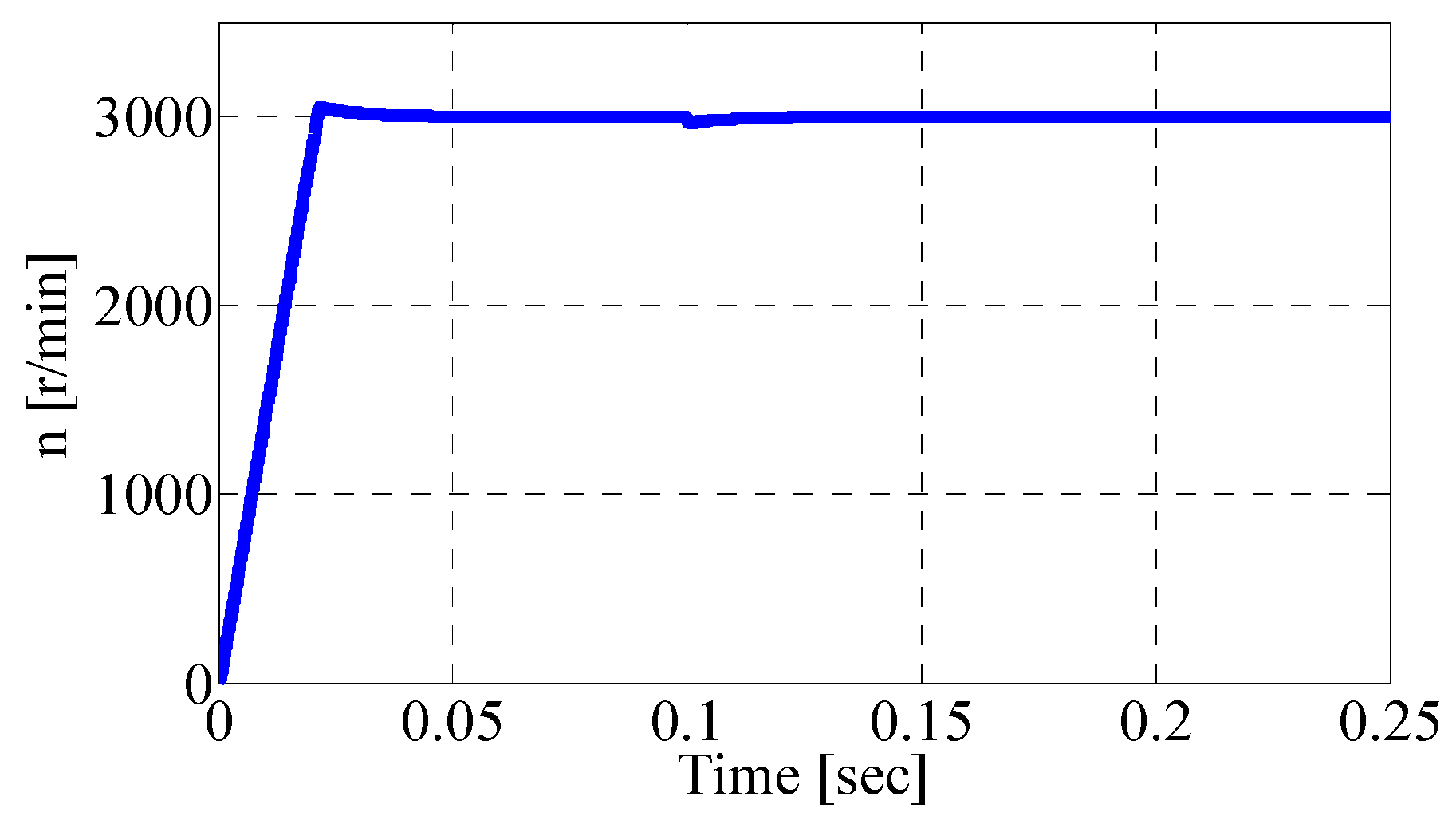
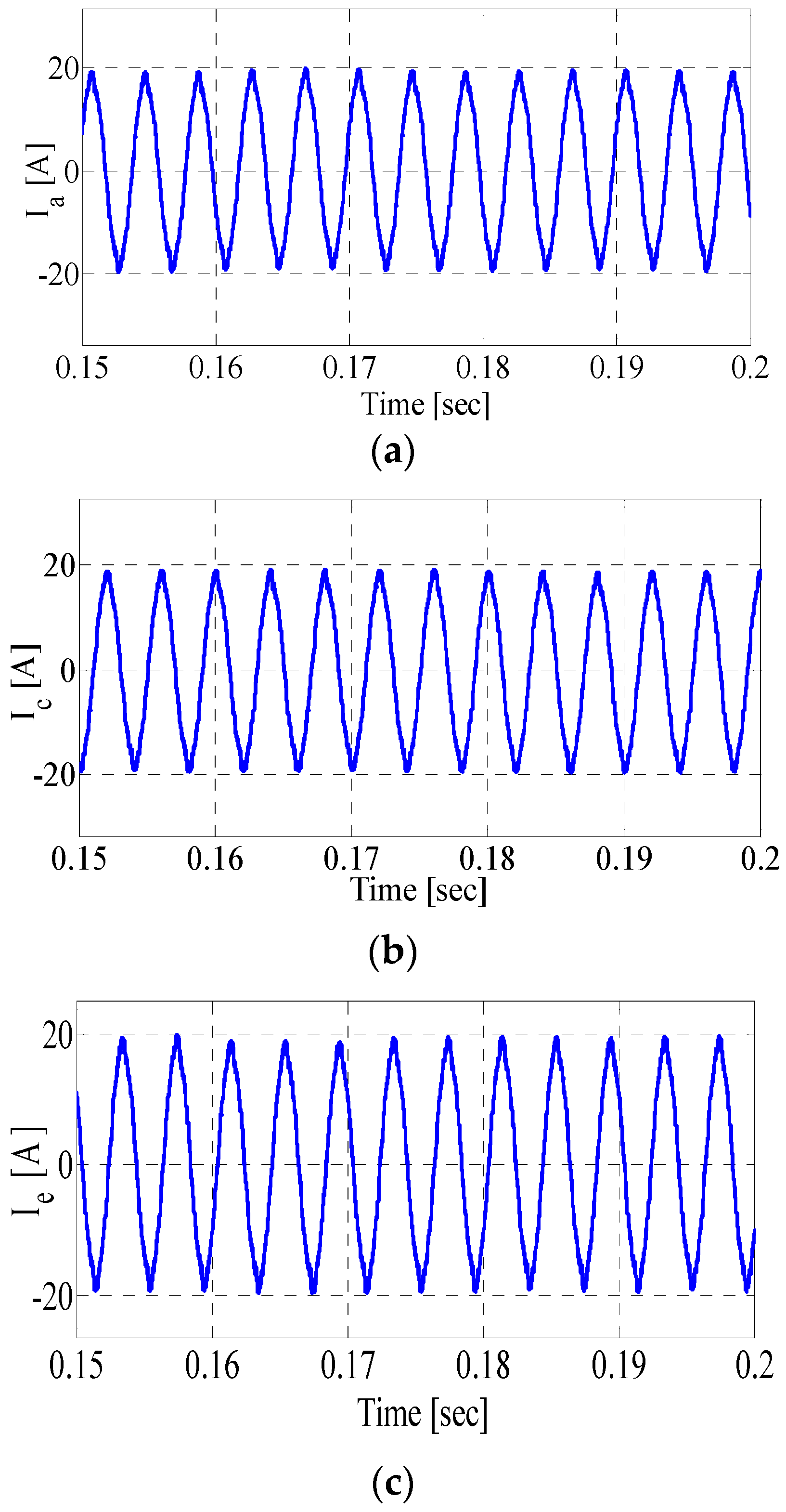
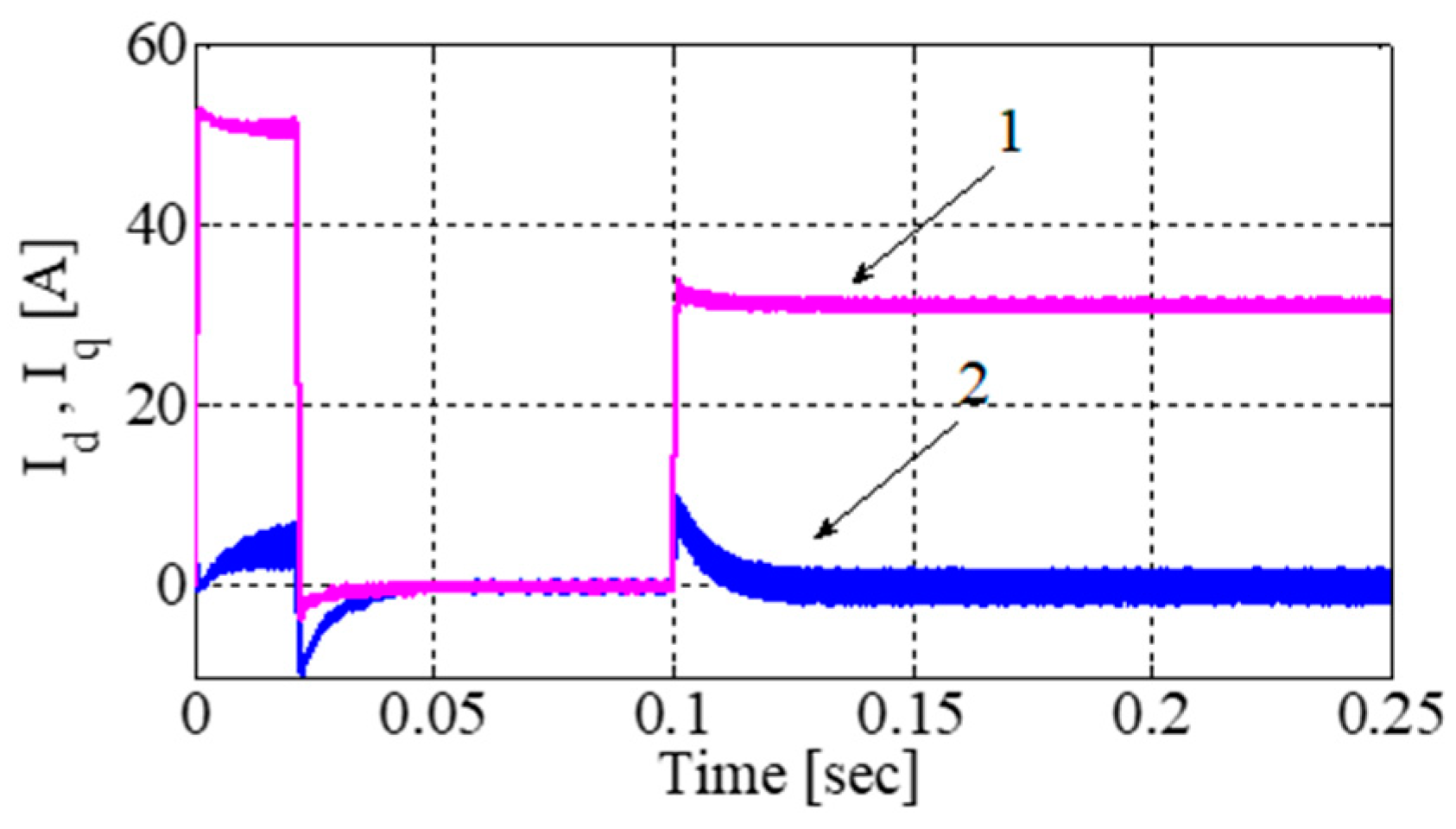
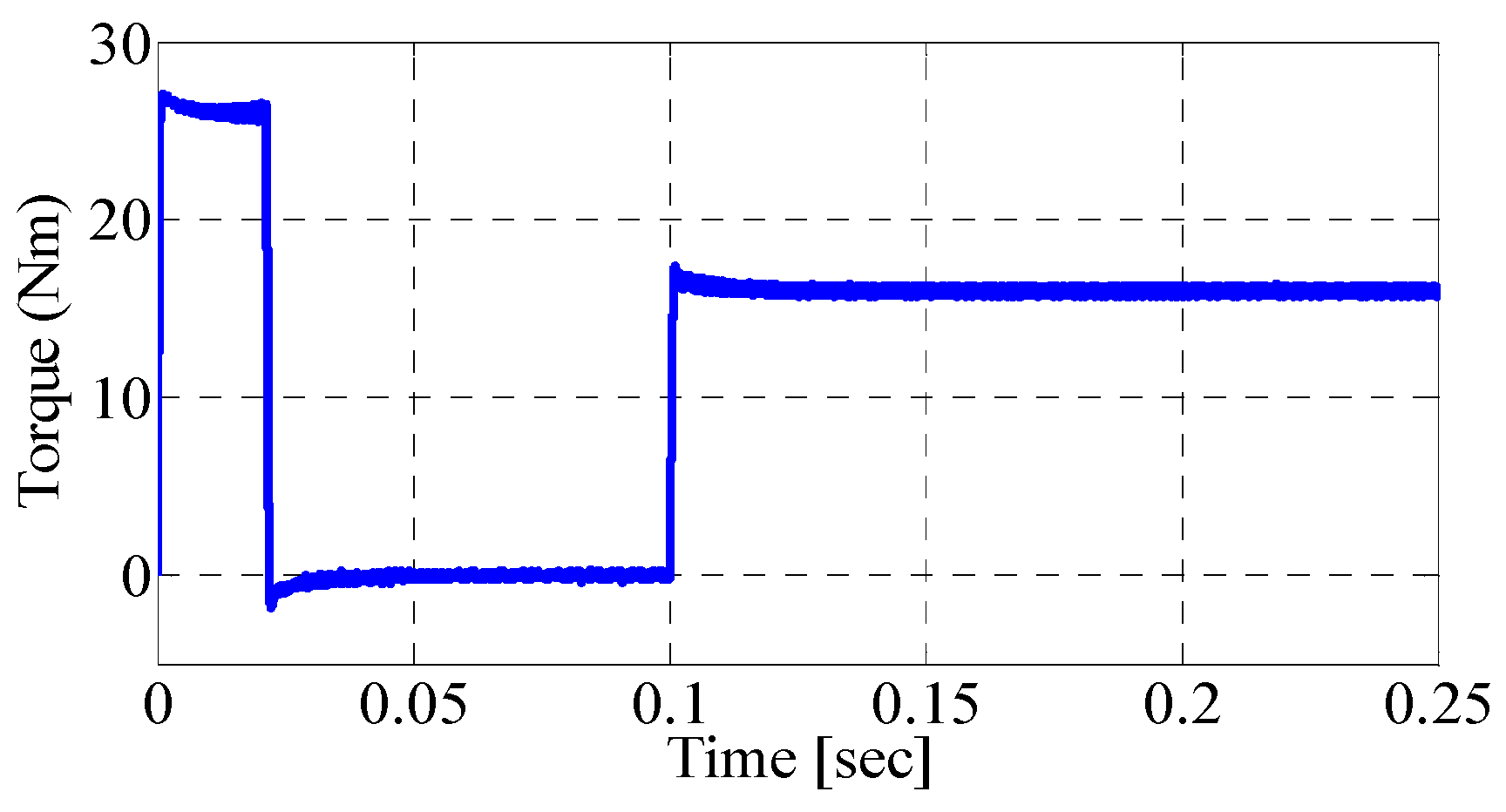
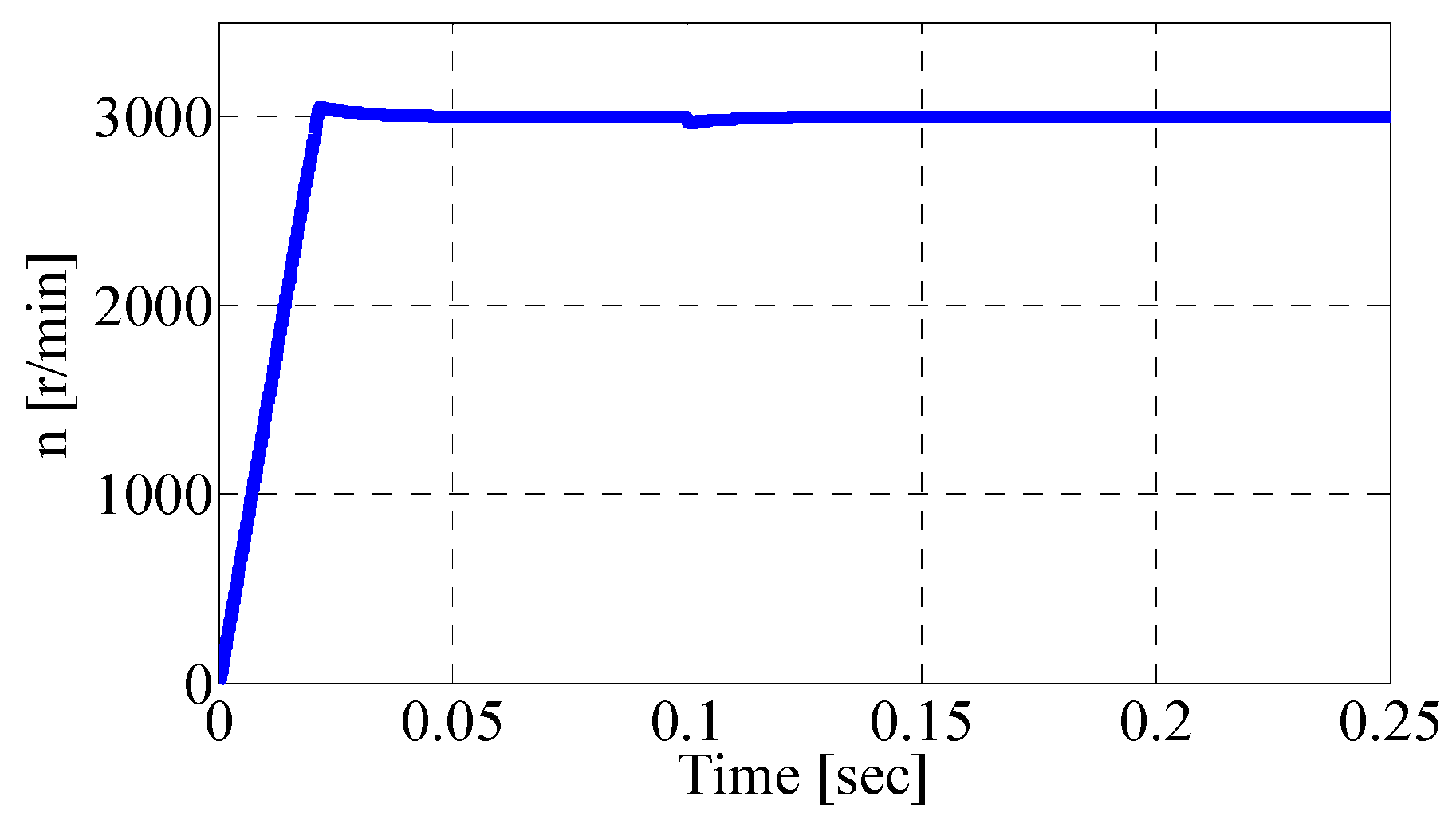
4. The Result of Vector Control for DTP-PMSMs
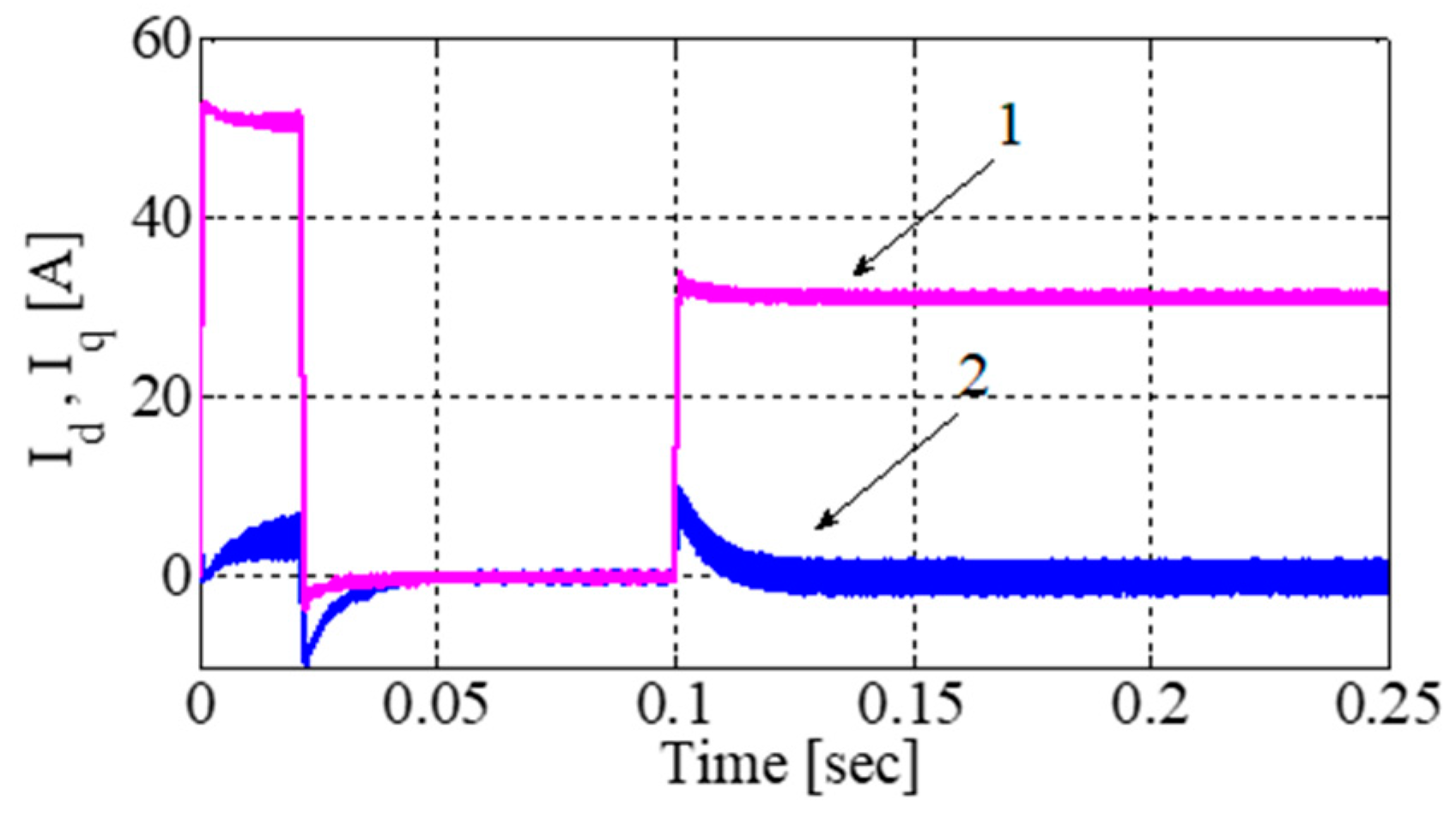
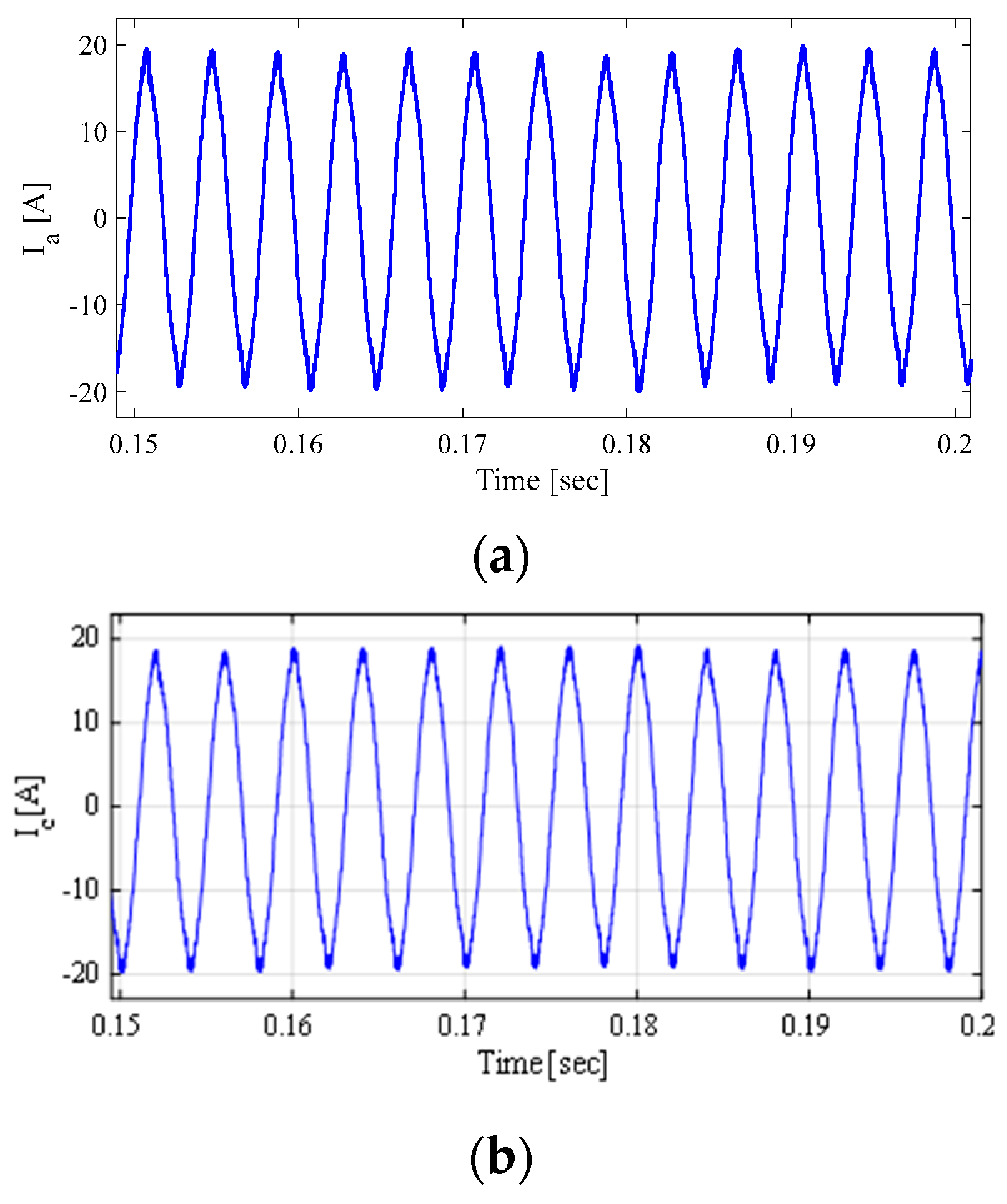
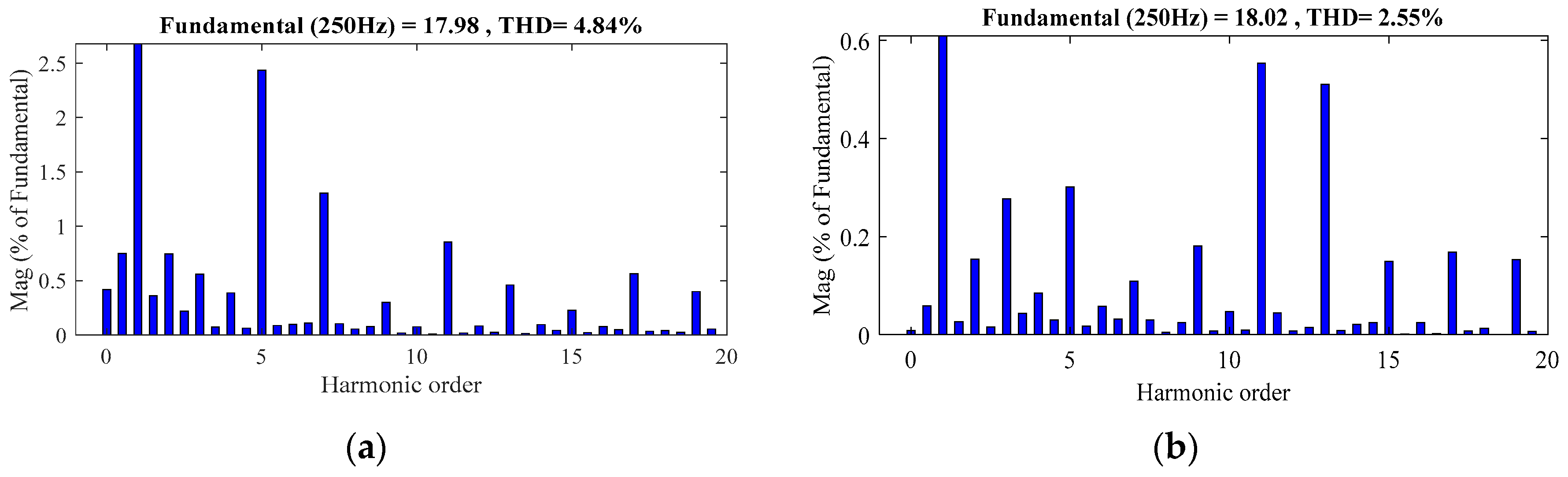
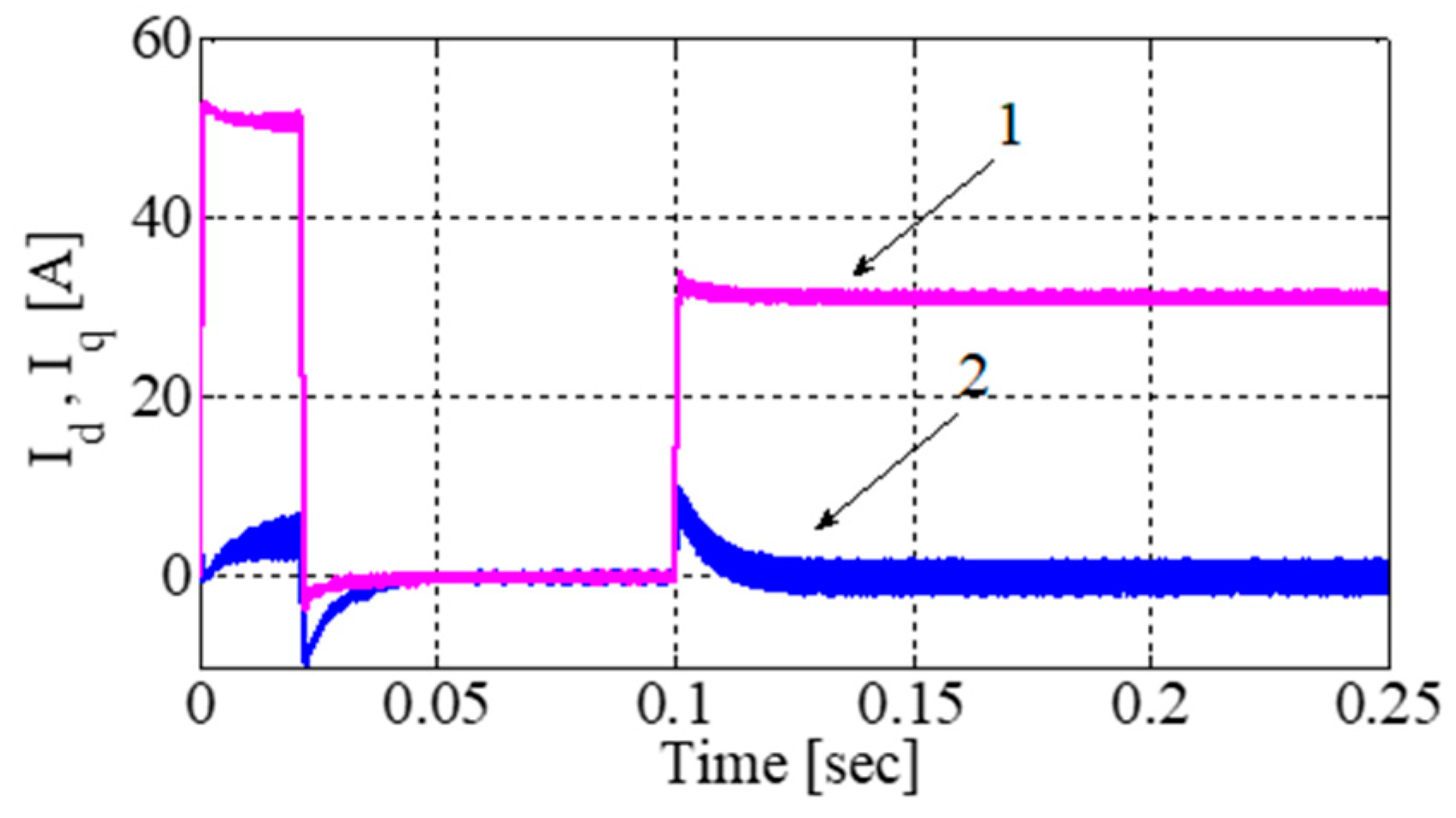
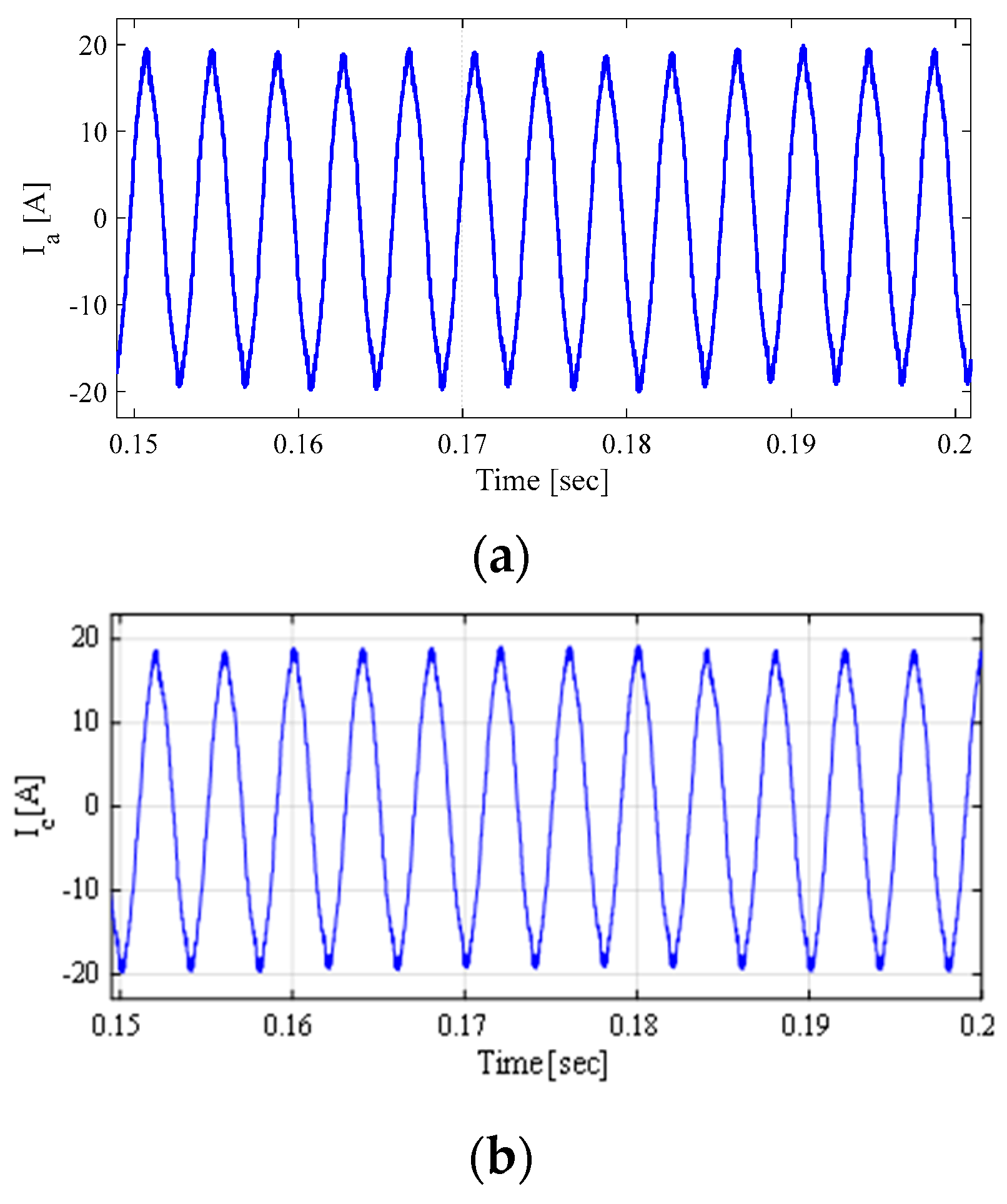
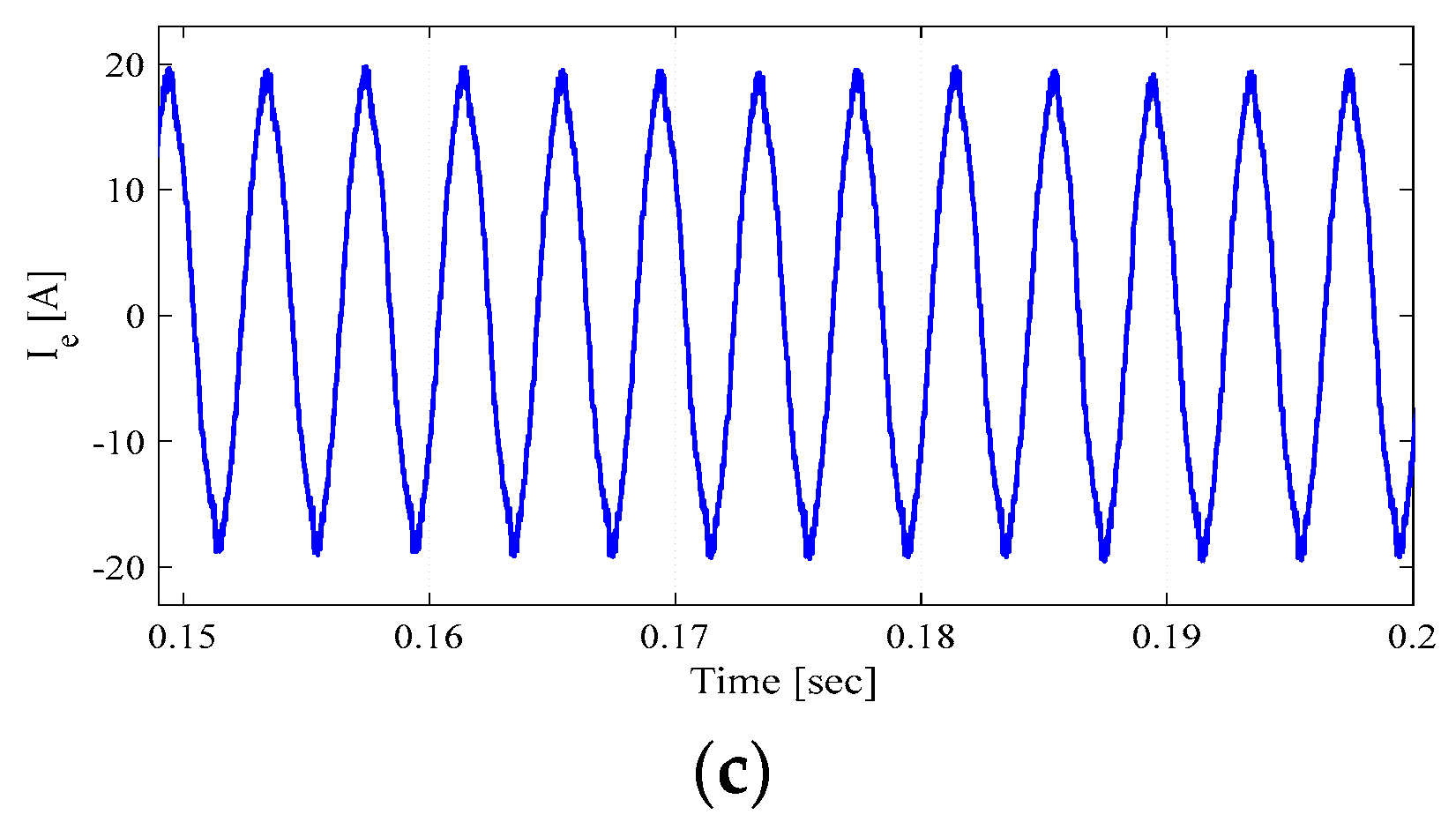
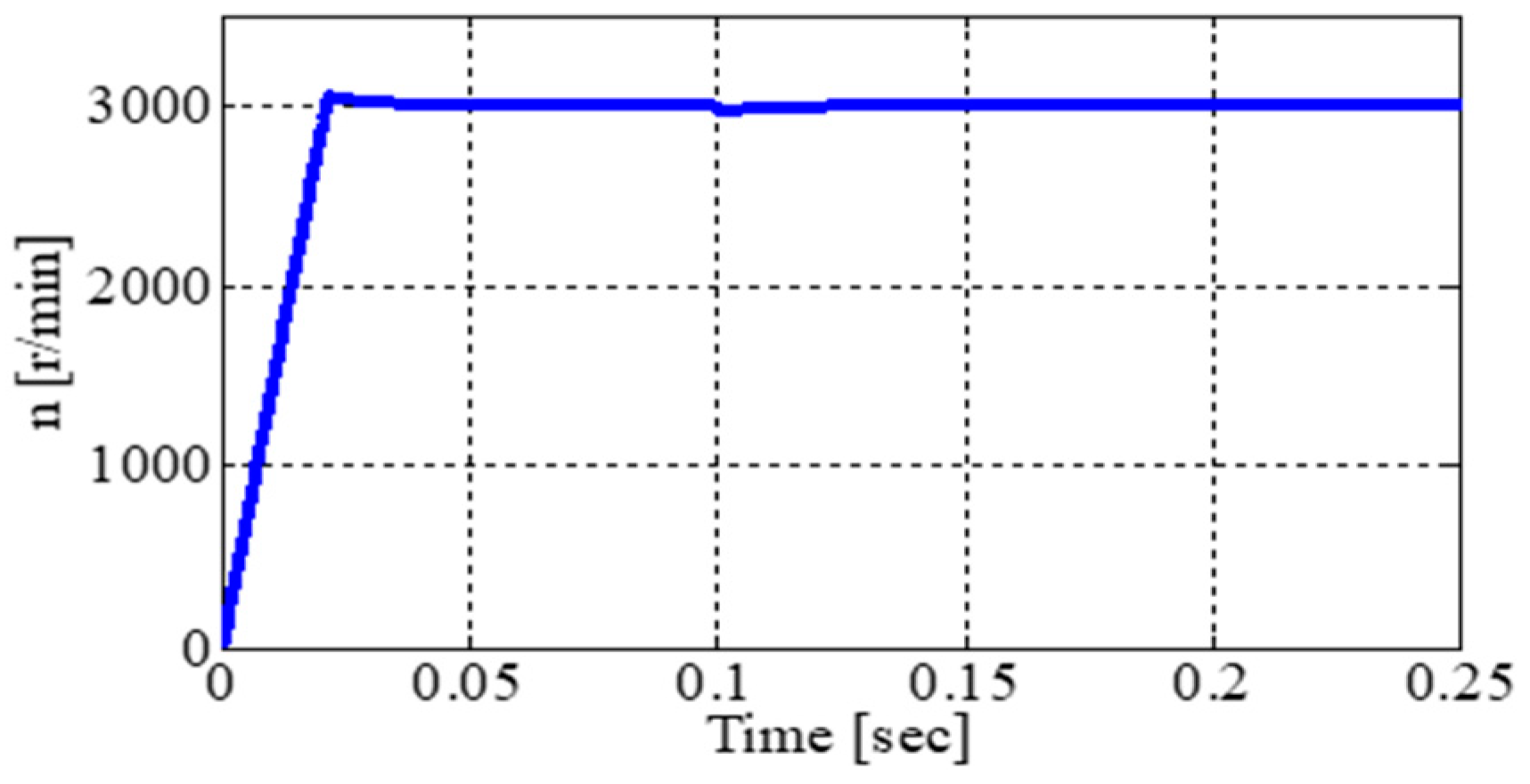
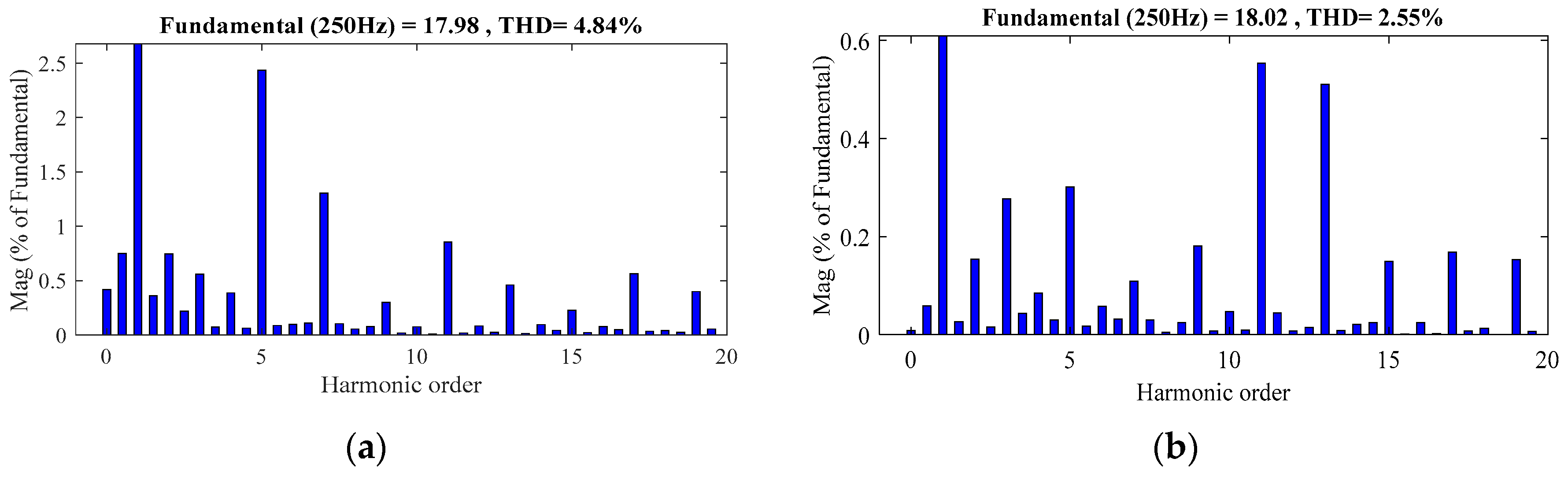
4.1. Two-Loops Current Control of DTP-PMSMs
4.2. Four-Loops Current Control of DTP-PMSMs
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Power Rating | 5 kW |
| Speed Rating | 3000 r/min |
| Torque Rating | 16 Nm |
| Pole Pairs | 5 |
| Stator Resistance | 0.0495 Ω |
| Ld, Lq | 2.4633 mH, 2.4733mH |
| Leakage Inductance | 1.5207 mH |
References
- Tong, C.; Zheng, P.; Wu, Q.; Bai, J.; Zhao, Q. A brushless claw-pole double-rotor machine for power-split hybrid electric vehicles. IEEE Trans. Ind. Electron. 2014, 61, 4295–4305. [Google Scholar] [CrossRef]
- Levi, E. Multiphase electric machines for variable-speed applications. IEEE Trans. Ind. Electron. 2008, 55, 1893–1909. [Google Scholar] [CrossRef]
- Levi, E.; Barrero, F.; Duran, M.J. Multiphase machines and drives-revisited. IEEE Trans. Ind. Electron. 2016, 63, 429–432. [Google Scholar] [CrossRef]
- Pisek, P.; Stumberger, B.; Marcic, T.; Virtic, P. Design analysis and experimental validation of a double rotor synchronous PM machine used for HEV. IEEE Trans. Magn. 2013, 49, 152–155. [Google Scholar] [CrossRef]
- Dalal, A.; Ansari, M.N.; Kumar, P. A novel steady-state model of a hybrid dual rotor motor comprising electrical equivalent circuit and performance equations. IEEE Trans. Magn. 2014, 50, 1–11. [Google Scholar] [CrossRef]
- Ren, Y.; Zhu, Z.-Q. Enhancement of steady-state performance in direct-torque-controlled dual three-phase permanent-magnet synchronous machine drives with modified switching table. IEEE Trans. Ind. Electron. 2015, 62, 3338–3350. [Google Scholar] [CrossRef]
- Almarhoon, A.H.; Ren, Y.; Zhu, Z. Sensorless switching-table-based direct torque control for dual three-phase PMSM drives. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014. [Google Scholar]
- Bojoi, R.; Lazzari, M.; Profumo, F.; Tenconi, A. Digital field-oriented control for dual three-phase induction motor drives. IEEE Trans. Ind. Appl. 2003, 39, 752–760. [Google Scholar] [CrossRef]
- Parsa, L. On advantages of multi-phase machines. In Proceedings of the 2005 31st Annual Conference of IEEE Industrial Electronics Society (IECON 2005), Raleigh, NC, USA, 6–10 November 2005. [Google Scholar]
- Zhao, Y.; Lipo, T.A. Space vector PWM control of dual three-phase induction machine using vector space decomposition. IEEE Trans. Ind. Appl. 1995, 31, 1100–1109. [Google Scholar] [CrossRef]
- Zheng, P.; Wu, F.; Lei, Y.; Sui, Y.; Yu, B. Investigation of a novel 24-slot/14-pole six-phase fault-tolerant modular permanent-magnet in-wheel motor for electric vehicles. Energies 2013, 6, 4980–5002. [Google Scholar] [CrossRef]
- Changpan, Z.; Jianyong, S.; Guijie, Y.; Nianwei, X. Four-dimension current vector control for dual three-phase PMSM. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014. [Google Scholar]
- Ahmad, M.; Zhang, W.; Gao, Q. Low and zero speed position estimation of dual three-phase PMSMs based on the excitation of PWM waveforms. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—CCE Asia), Kaohsiung, Taiwan, 3–7 June 2017. [Google Scholar]
- Yano, M.; Abe, S.; Ohno, E. History of power electronics for motor drives in Japan. In Proceedings of the 2004 IEEE Conference on the History of Electronics, Bletchley Park, Bletchley Town, UK, 28–30 June 2004. [Google Scholar]
- Vas, P. Sensorless Vector and Direct Torque Control; Oxford University Press: Oxford, UK, 1998. [Google Scholar]
- Che, H.S.; Levi, E.; Jones, M.; Hew, W.-P.; Rahim, N.A. Current control methods for an asymmetrical six-phase induction motor drive. IEEE Trans. Power Electron. 2014, 29, 407–417. [Google Scholar] [CrossRef]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, M.; Wang, Z.; Yan, S.; Wang, C.; Wang, Z.; Zhu, C.; Qin, H. Comparative Analysis of Two and Four Current Loops for Vector Controlled Dual-Three Phase Permanent Magnet Synchronous Motor. Electronics 2018, 7, 269. https://doi.org/10.3390/electronics7110269
Ahmad M, Wang Z, Yan S, Wang C, Wang Z, Zhu C, Qin H. Comparative Analysis of Two and Four Current Loops for Vector Controlled Dual-Three Phase Permanent Magnet Synchronous Motor. Electronics. 2018; 7(11):269. https://doi.org/10.3390/electronics7110269
Chicago/Turabian StyleAhmad, Muhammad, Zhixin Wang, Sheng Yan, Chengmin Wang, Zhidong Wang, Chenghzi Zhu, and Hua Qin. 2018. "Comparative Analysis of Two and Four Current Loops for Vector Controlled Dual-Three Phase Permanent Magnet Synchronous Motor" Electronics 7, no. 11: 269. https://doi.org/10.3390/electronics7110269
APA StyleAhmad, M., Wang, Z., Yan, S., Wang, C., Wang, Z., Zhu, C., & Qin, H. (2018). Comparative Analysis of Two and Four Current Loops for Vector Controlled Dual-Three Phase Permanent Magnet Synchronous Motor. Electronics, 7(11), 269. https://doi.org/10.3390/electronics7110269