Estimated Reaction Force-Based Bilateral Control between 3DOF Master and Hydraulic Slave Manipulators for Dismantlement


Abstract
1. Introduction
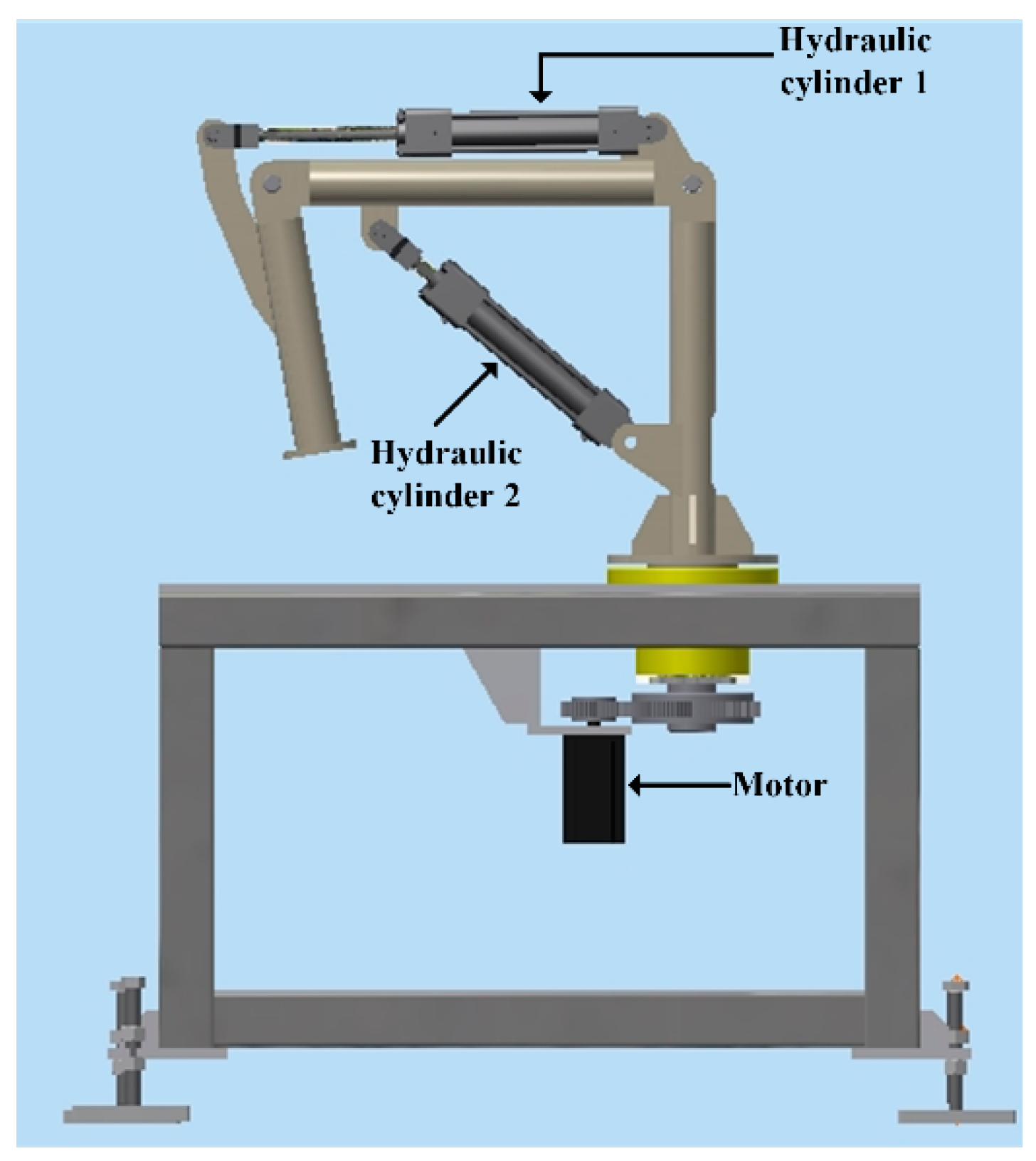
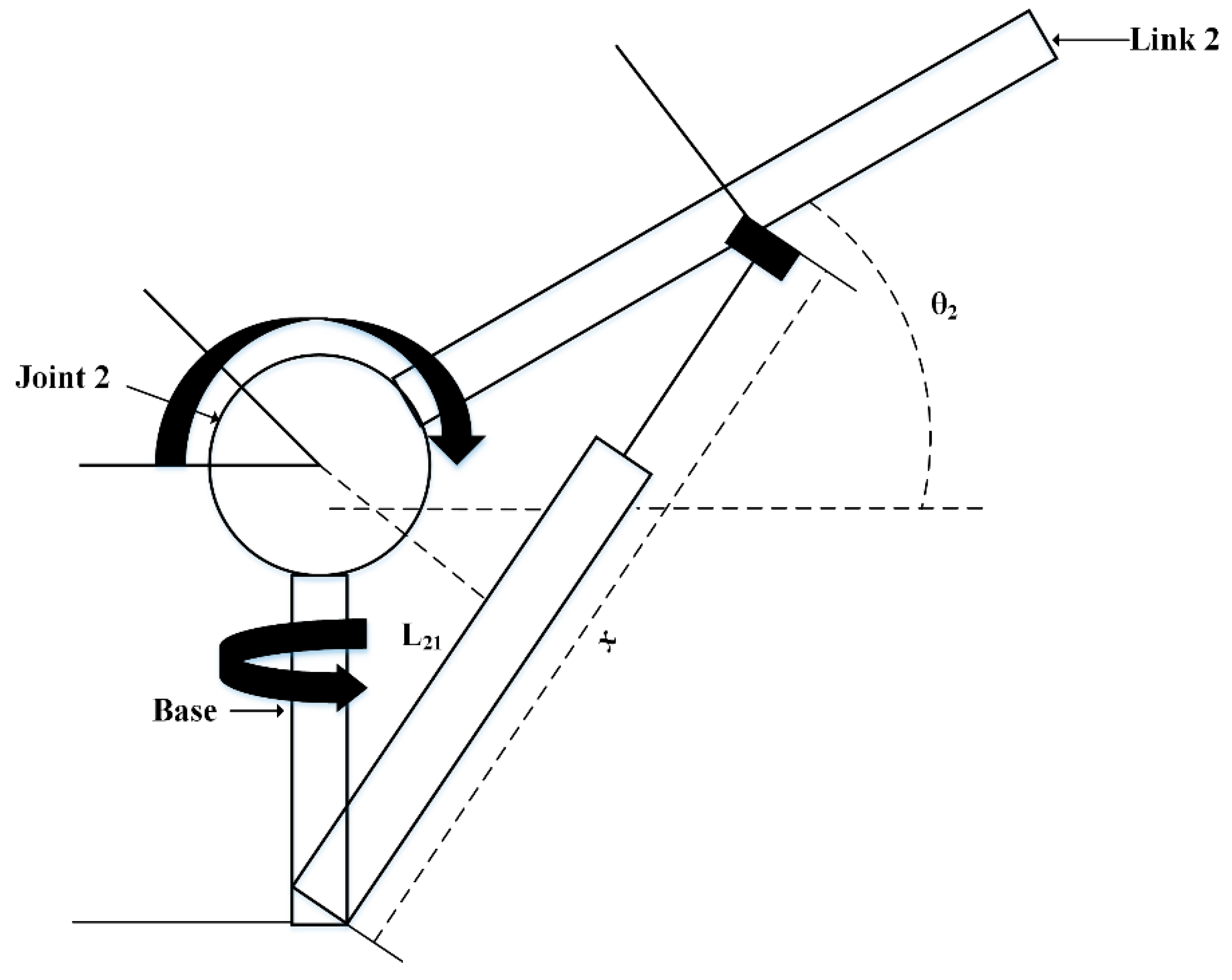
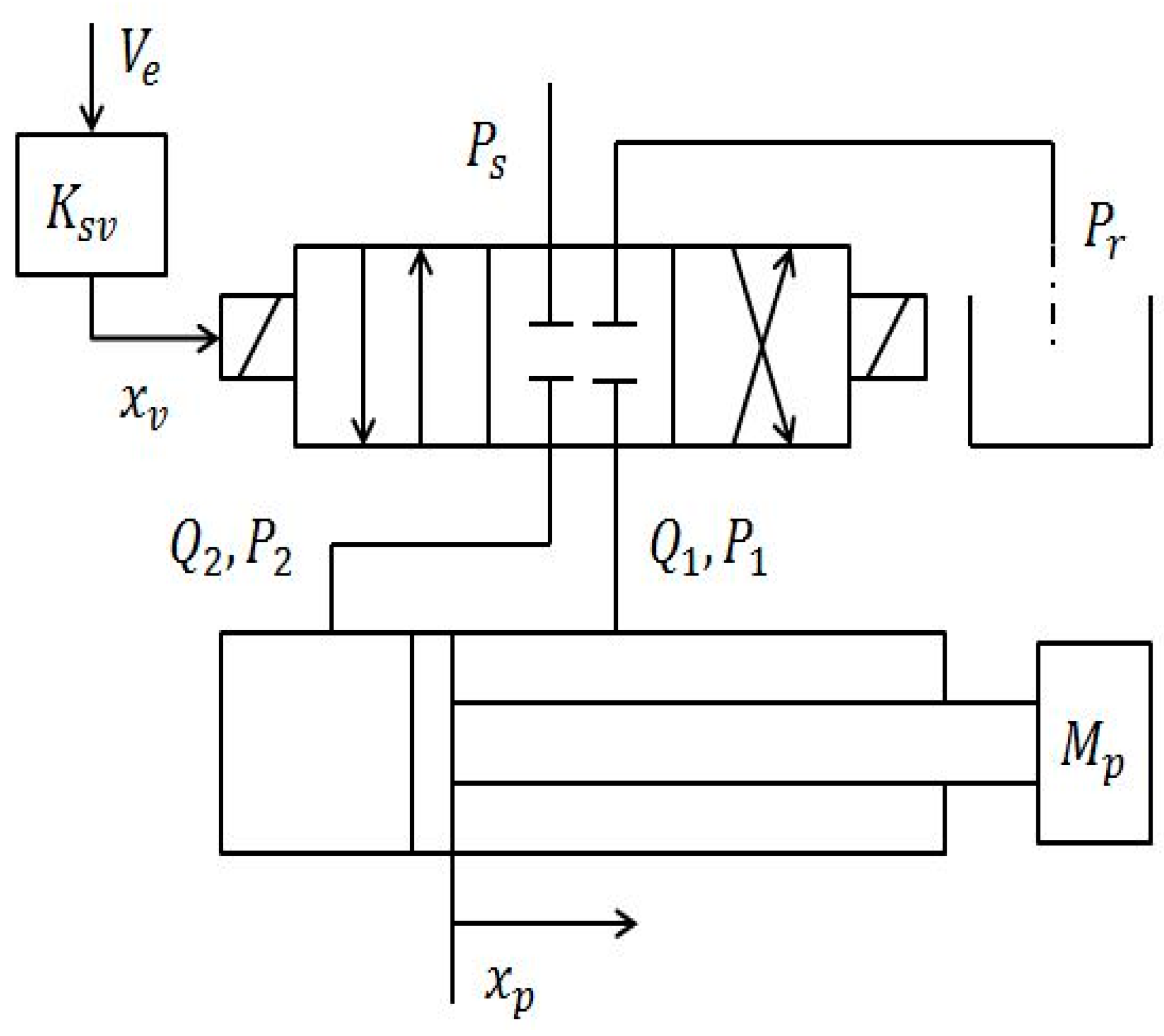
2. Mechanical Design and Dynamics of Hydraulic Servo System
3. Sliding Mode Control with Sliding Perturbation Observer (SMCSPO)
3.1. Sliding Mode Control
3.2. Reaction Force Estimation Based upon Sliding Perturbation Observer (SPO)
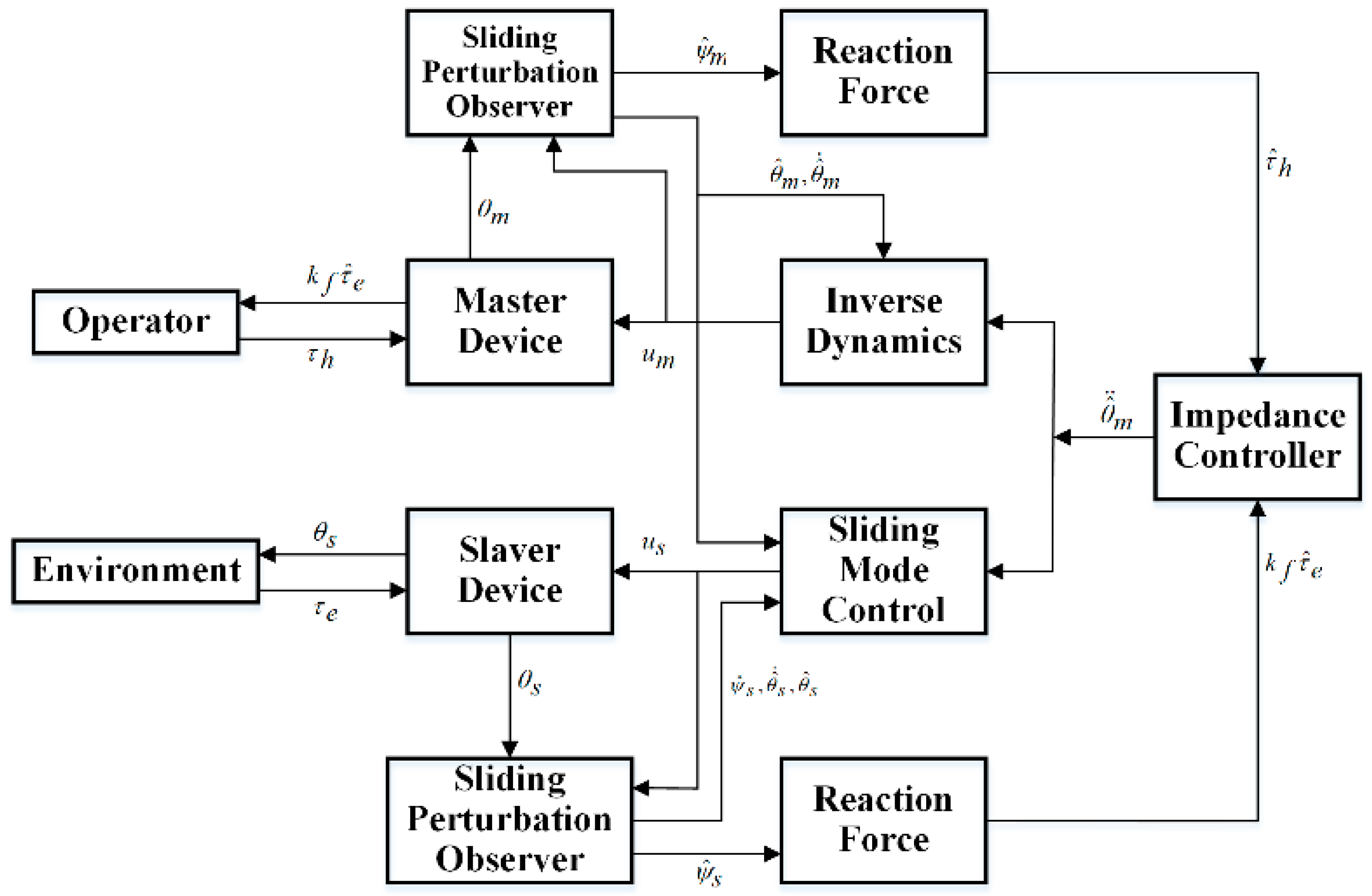
4. Bilateral Control Design between Master and Slave for 3DOF Hydraulic Servo System
4.1. Bilateral Control
4.2. Master Controller and Device
4.3. Slave Controller and Device
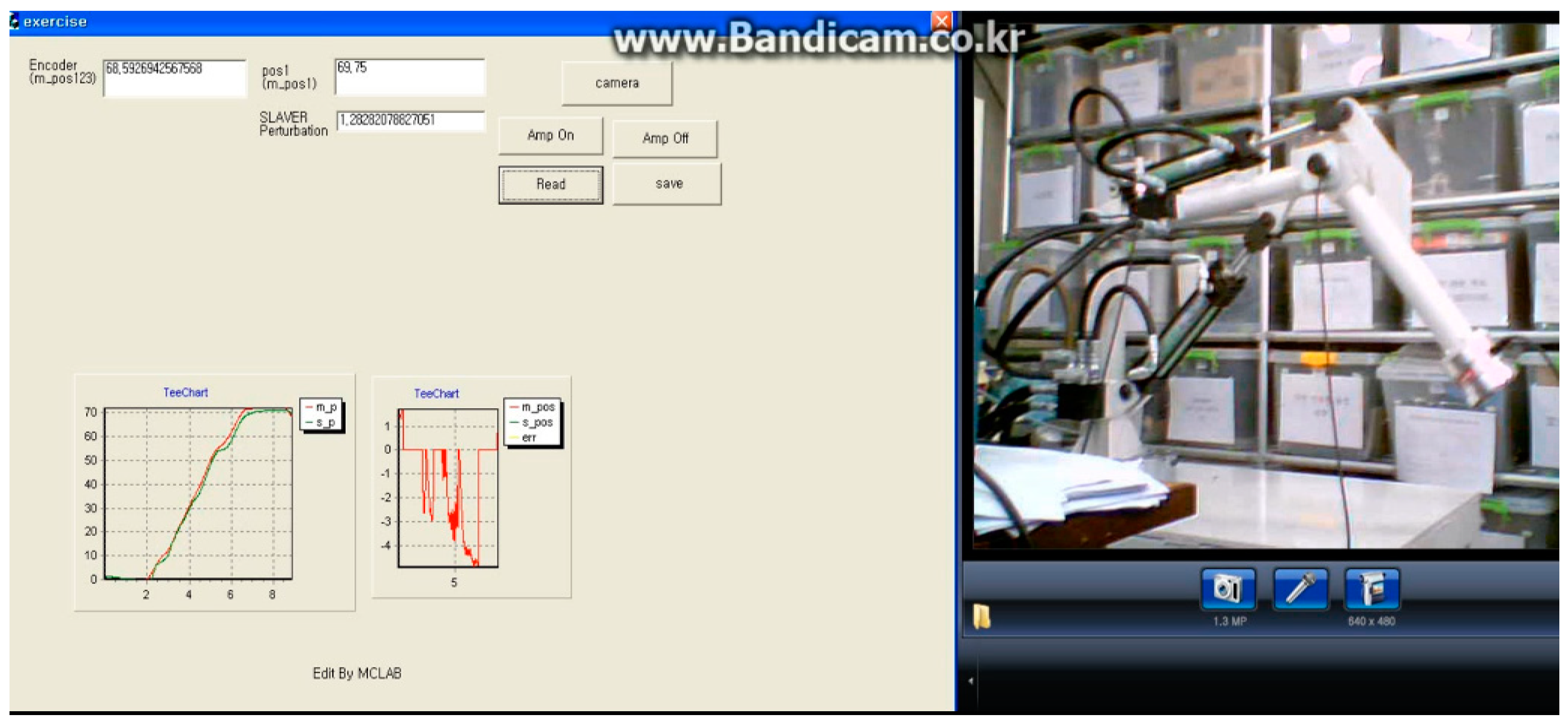
5. Experimental Environment
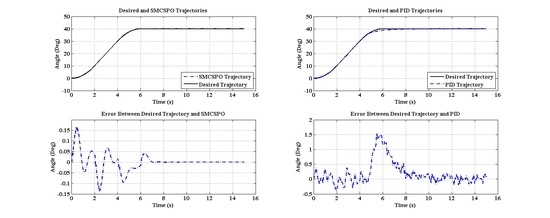
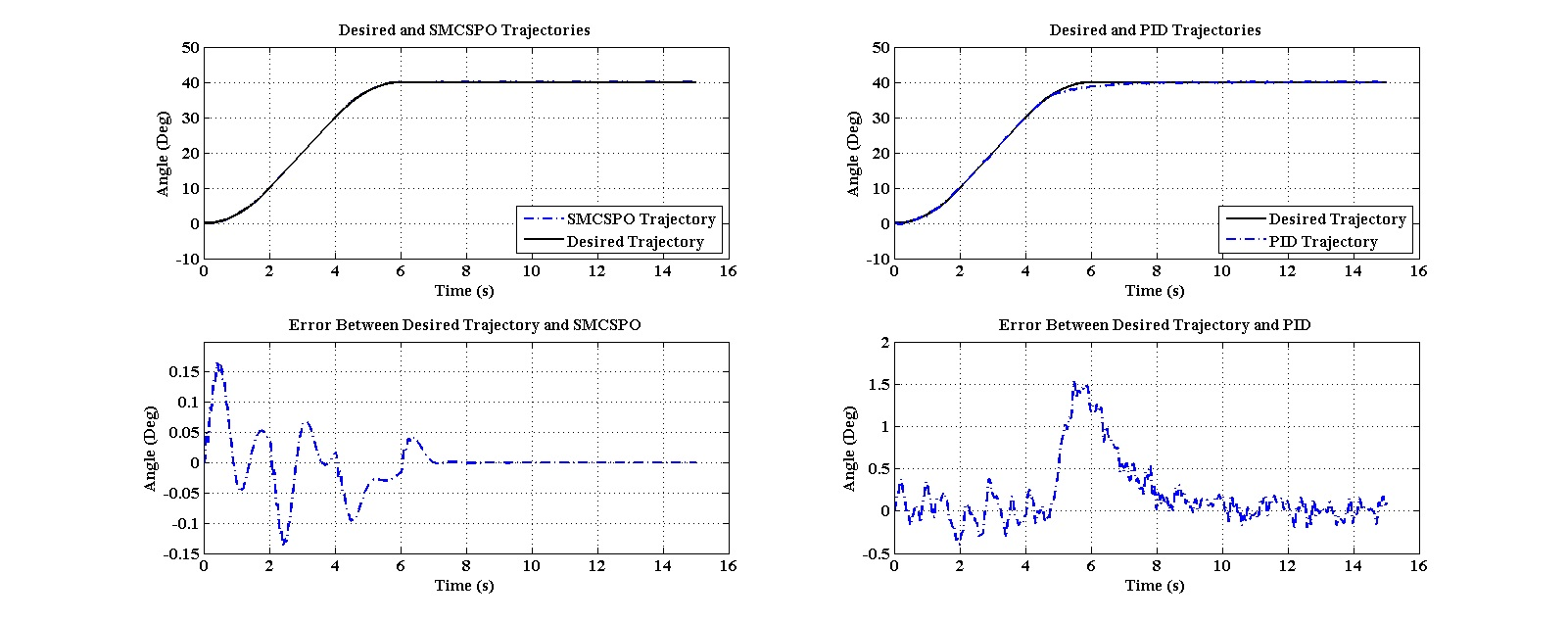
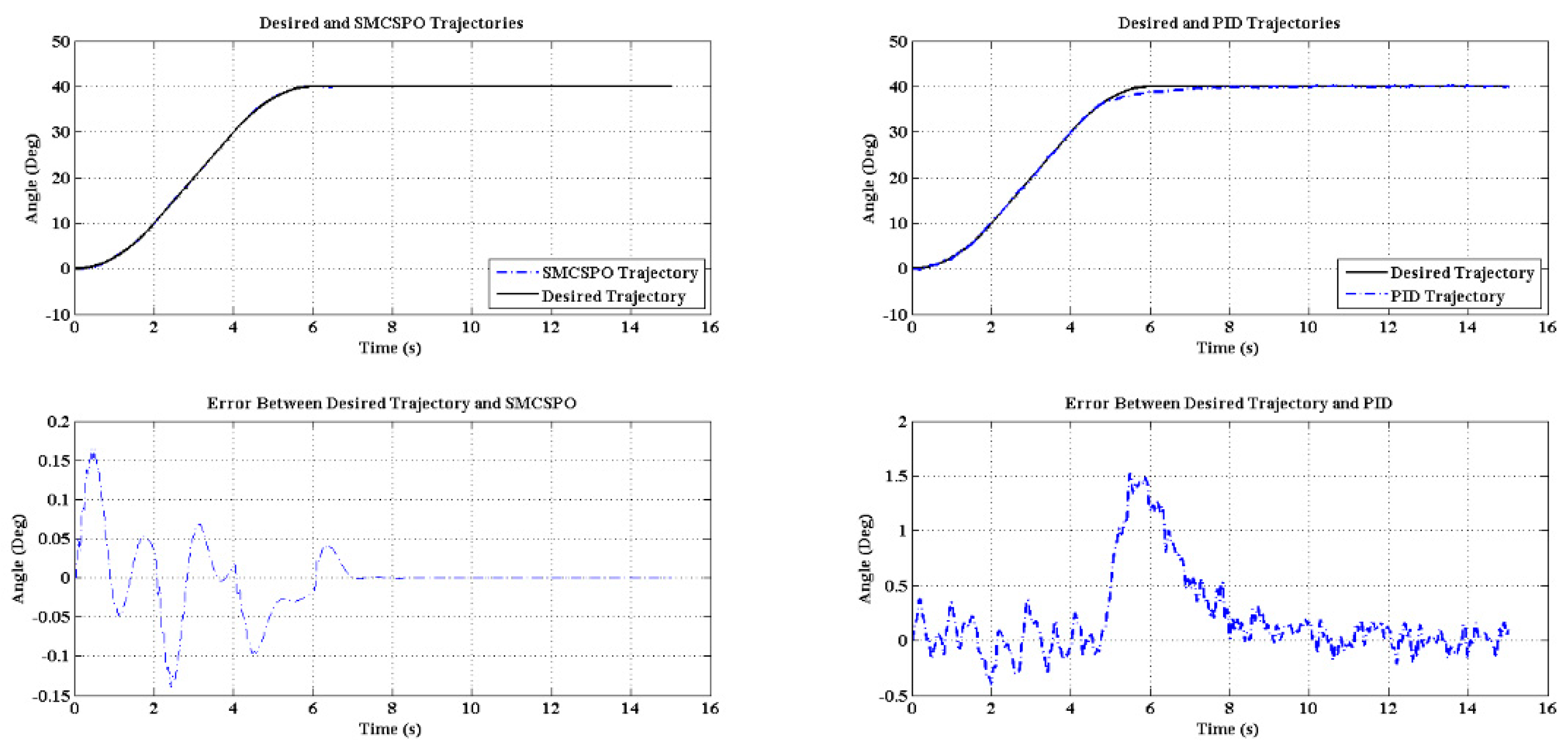
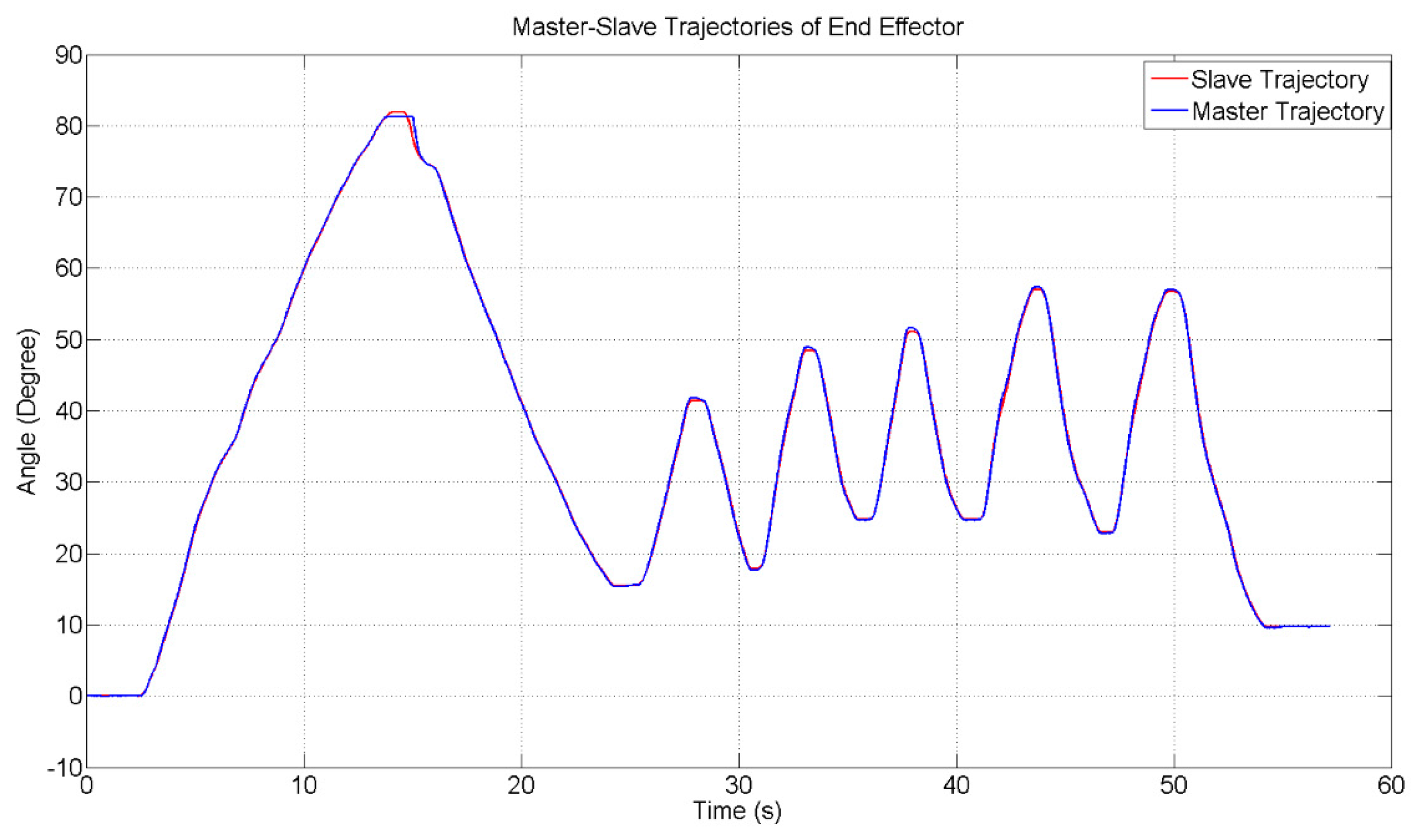
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

References
- Fisher, J.J. Applying Robots in Nuclear Applications; Society of Manufacturing Engineers: Dearborn, MI, USA, 1985. [Google Scholar]
- Clement, G.; Vertut, J.; Cregut, A.; Antione, P.; Guittet, J. Remote handling and transfer techniques in dismantling strategy. In Proceedings of the Seminar on Remote Handling in Nuclear Facilities, Oxford, UK, 2–5 October 1984; pp. 556–569. [Google Scholar]
- Ma, S.; Hirose, S.; Yoshinada, H. Development of a hyper-redundant multijoint manipulator for maintenance of nuclear reactors. Adv. Robot. 1994, 9, 281–300. [Google Scholar] [CrossRef]
- Denmeade, T. A pioneer’s journey into the sarcophagus. Nucl. Eng. Int. 1998, 43, 18–20. [Google Scholar]
- Varley, J. Windscale: Getting down to the core. Nucl. Eng. Int. 1997, 12, 26–28. [Google Scholar]
- Benest, T. Taking up arms for decommissioning. Nucl. Eng. Int. 2004, 49, 14–16. [Google Scholar]
- Tachibana, M.; Shimada, T.; Yanagihara, S. Development of remote dismantling systems for decommissioning of nuclear facilities. In Proceedings of the WM’00 Conference, Tucson, AZ, USA, 27 February–3 March 2000. [Google Scholar]
- Bakari, M.J.; Zied, K.M.; Seward, D.W. Development of a multi-arm mobile robot for nuclear decommissioning tasks. Int. J. Adv. Robot. Syst. 2007, 4, 51. [Google Scholar] [CrossRef]
- Dubus, G.; David, O.; Measson, Y.; Friconneau, J.-P.; Palmer, J. Making hydraulic manipulators cleaner and safer: From oil to demineralized water hydraulics. In Proceedings of the IROS 2008. IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 430–437. [Google Scholar]
- Chabal, C.; Proietti, R.; Mante, J.-F.; Idasiak, J.-M. Virtual reality technologies: A way to verify dismantling operations, first application case in a highly radioactive cell. In Proceedings of the ACHI, Digital World, Le Gosier, France, 23–28 February 2011. [Google Scholar]
- Raju, G.J.; Verghese, G.C.; Sheridan, T.B. Design issues in 2-port network models of bilateral remote manipulation. In Proceedings of the 1989 IEEE International Conference on Robotics and Automation, Scottsdale, AZ, USA, 14–19 May 1989; IEEE: Piscataway, NJ, USA, 1989; pp. 1316–1321. [Google Scholar]
- Hashtrudi-Zaad, K.; Salcudean, S.E. Transparency in time-delayed systems and the effect of local force feedback for transparent teleoperation. IEEE Trans. Robot. Autom. 2002, 18, 108–114. [Google Scholar] [CrossRef]
- Lawrence, D.A. Stability and transparency in bilateral teleoperation. IEEE Trans. Robot. Autom. 1993, 9, 624–637. [Google Scholar] [CrossRef]
- Yokokohji, Y.; Yoshikawa, T. Bilateral control of master-slave manipulators for ideal kinesthetic coupling-formulation and experiment. IEEE Trans. Robot. Autom. 1994, 10, 605–620. [Google Scholar] [CrossRef]
- Hannaford, B. A design framework for teleoperators with kinesthetic feedback. IEEE Trans. Robot. Autom. 1989, 5, 426–434. [Google Scholar] [CrossRef]
- Adams, R.J.; Hannaford, B. Stable haptic interaction with virtual environments. IEEE Trans. Robot. Autom. 1999, 15, 465–474. [Google Scholar] [CrossRef]
- Yang, Y.; Hua, C.; Li, J.; Guan, X. Finite-time output-feedback synchronization control for bilateral teleoperation system via neural networks. Inf. Sci. 2017, 406, 216–233. [Google Scholar] [CrossRef]
- Truong, D.Q.; Truong, B.N.M.; Trung, N.T.; Nahian, S.A.; Ahn, K.K. Force reflecting joystick control for applications to bilateral teleoperation in construction machinery. Int. J. Precis. Eng. Manuf. 2017, 18, 301–315. [Google Scholar] [CrossRef]
- Peñaloza-Mejía, O.; Márquez-Martínez, L.A.; Alvarez-Gallegos, J.; Alvarez, J. Master-slave teleoperation of underactuated mechanical systems with communication delays. Int. J. Control Autom. Syst. 2017, 15, 827–836. [Google Scholar] [CrossRef]
- Mellah, R.; Guermah, S.; Toumi, R. Adaptive control of bilateral teleoperation system with compensatory neural-fuzzy controllers. Int. J. Control Autom. Syst. 2017, 15, 1949–1959. [Google Scholar] [CrossRef]
- Farooq, U.; Gu, J.; El-Hawary, M.; Asad, M.U.; Abbas, G. Fuzzy model based bilateral control design of nonlinear tele-operation system using method of state convergence. IEEE Access 2016, 4, 4119–4135. [Google Scholar] [CrossRef]
- Liu, Y.-C.; Khong, M.-H.; Ou, T.-W. Nonlinear bilateral teleoperators with non-collocated remote controller over delayed network. Mechatronics 2017, 45, 25–36. [Google Scholar] [CrossRef]
- Su, X. Master–slave control for active suspension systems with hydraulic actuator dynamics. IEEE Access 2017, 5, 3612–3621. [Google Scholar] [CrossRef]
- Kallu, K.D.; Jie, W.; Lee, M.C. Sensorless reaction force estimation of the end effector of a dual-arm robot manipulator using sliding mode control with a sliding perturbation observer. Int. J. Control Autom. Syst. 2018, 16, 1367–1378. [Google Scholar] [CrossRef]
- Abut, T.; Soyguder, S. Real-time control of bilateral teleoperation system with adaptive computed torque method. Ind. Robot Int. J. 2017, 44, 299–311. [Google Scholar] [CrossRef]
- Islam, S. State and impedance reflection based control interface for bilateral telerobotic system with asymmetric delay. J. Intell. Robot. Syst. 2017, 87, 425–438. [Google Scholar] [CrossRef]
- Le, M.-Q. Development of Bilateral Control for Pneumatic Actuated Teleoperation System; INSA: Lyon, France, 2011. [Google Scholar]
- Patil, M.D.; Abukhalil, T. Design and implementation of heterogeneous robot swarm. In Proceedings of the ASEE 2014 Zone I Conference, Bridgpeort, CT, USA, 3–5 April 2014; pp. 3–5. [Google Scholar]
- Xu, X.; Cizmeci, B.; Schuwerk, C.; Steinbach, E. Model-mediated teleoperation: Toward stable and transparent teleoperation systems. IEEE Access 2016, 4, 425–449. [Google Scholar] [CrossRef]
- Sun, D.; Naghdy, F.; Du, H. Time domain passivity control of time-delayed bilateral telerobotics with prescribed performance. Nonlinear Dyn. 2017, 87, 1253–1270. [Google Scholar] [CrossRef]
- Azimifar, F.; Abrishamkar, M.; Farzaneh, B.; Sarhan, A.A.D.; Amini, H. Improving teleoperation system performance in the presence of estimated external force. Robot. Comput.-Integr. Manuf. 2017, 46, 86–93. [Google Scholar] [CrossRef]
- Sakaino, S.; Furuya, T.; Tsuji, T. Bilateral control between electric and hydraulic actuators using linearization of hydraulic actuators. IEEE Trans. Ind. Electron. 2017, 64, 4631–4641. [Google Scholar] [CrossRef]
- Soltani, M.K.; Khanmohammadi, S.; Ghalichi, F.; Janabi-Sharifi, F. A soft robotics nonlinear hybrid position/force control for tendon driven catheters. Int. J. Control Autom. Syst. 2017, 15, 54–63. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, S.; Chen, B.; Wu, H. Trajectory tracking control of underwater vehicle-manipulator system using discrete time delay estimation. IEEE Access 2017, 5, 7435–7443. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, W.; Dong, X.-C. Nonlinear adaptive control for dynamic and dead-zone uncertainties in robotic systems. Int. J. Control Autom. Syst. 2017, 15, 875–882. [Google Scholar] [CrossRef]
- Li, Y.F.; Chen, X.B. On the dynamic behavior of a force/torque sensor for robots. IEEE Trans. Instrum. Measur. 1998, 47, 304–308. [Google Scholar] [CrossRef]
- Katsura, S.; Matsumoto, Y.; Ohnishi, K. Analysis and experimental validation of force bandwidth for force control. IEEE Trans. Ind. Electron. 2006, 53, 922–928. [Google Scholar] [CrossRef]
- Wang, J.; Dad, K.; Lee, M.C. Bilateral control of hydraulic servo system based on smcspo for 1dof master slave manipulator. In Proceedings of the 2017 International Conference on Artificial Lifeand Robotics (ICAROB2017), Miyazaki, Japan, 19–22 January 2017. [Google Scholar]
- Moura, J.T.; Elmali, H.; Olgac, N. Sliding mode control with sliding perturbation observer. J. Dyn. Syst. Measur. Control 1997, 119, 657–665. [Google Scholar] [CrossRef]
- Slotine, J.J.; Sastry, S.S. Tracking control of non-linear systems using sliding surfaces with application to robot manipulators. In Proceedings of the 1983 American Control Conference, San Francisco, CA, USA, 22–24 June 1983; pp. 132–135. [Google Scholar]
- Moura, J.T.; Ghosh Roy, R.; Olgac, N. Sliding mode control with perturbation estimation (smcpe) and frequency shaped sliding surfaces. J. Dyn. Syst. Measur. Control 1997, 119, 584–588. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]
- Cho, T.-D.; Seo, S.-H.; Yang, S.-M. A study on the robust position control of single-rod hydraulic system. J. Korean Soc. Precis. Eng. 1999, 16, 128–135. [Google Scholar]
- Jelali, M.; Kroll, A. Hydraulic Servo-Systems: Modelling, Identification and Control; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Lee, M.C.; Aoshima, N. Identification and its evaluation of the system with a nonlinear element by signal compression method. Trans. Soc. Instrum. Control Eng. 1989, 25, 729–736. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No | Items | Specification |
|---|---|---|
| 1 | Hydraulic cylinder | Piston and rod diameter = 0.04 m, 0.022 Stroke = 20 cm |
| 2 | Hydraulic pump | P_max = 210 bar Q_max = 20 1/min |
| 3 | Displacement transducer | Stroke = 20 cm (10 V) |
| 4 | Propositional directional control valve | D633-313A, Moog, Inc. |
| 5 | Relief valve | P_set = 20 bar |
| 6 | Control board | PC based MMC |
| S. No | Moment of Inertia (Master) kg·m2 | Moment of Inertia (Slave) kg·m2 | Damper (Master) kg·m2 | Damper (Slave) kg·m2 |
|---|---|---|---|---|
| 1 | 1.35135 | 303.26 | 3.99 | 17,355.5 |
| 2 | 1.5 | 59.52 | 3.99 | 5241.66 |
| 3 | 0.74 | 355.91 | 3.99 | 2214 |
| S. No | Parameters | Values |
|---|---|---|
| 1 | k · (End Effector) | 25 |
| 2 | k · (2nd Link) | 250 |
| 3 | k · (Base) | 8 |
| 4 | k1 | 39 |
| 5 | k2 | 507 |
| 6 | 1 | |
| 7 | 13 | |
| 8 | 1 | |
| 9 | (End Effector) | 4.08 |
| 10 | (2nd Link) | 10 |
| 11 | (Base) | 2.58 |
| S. No | Links | Maximum Error (Degree) | Maximum Trajectory (Degree) |
|---|---|---|---|
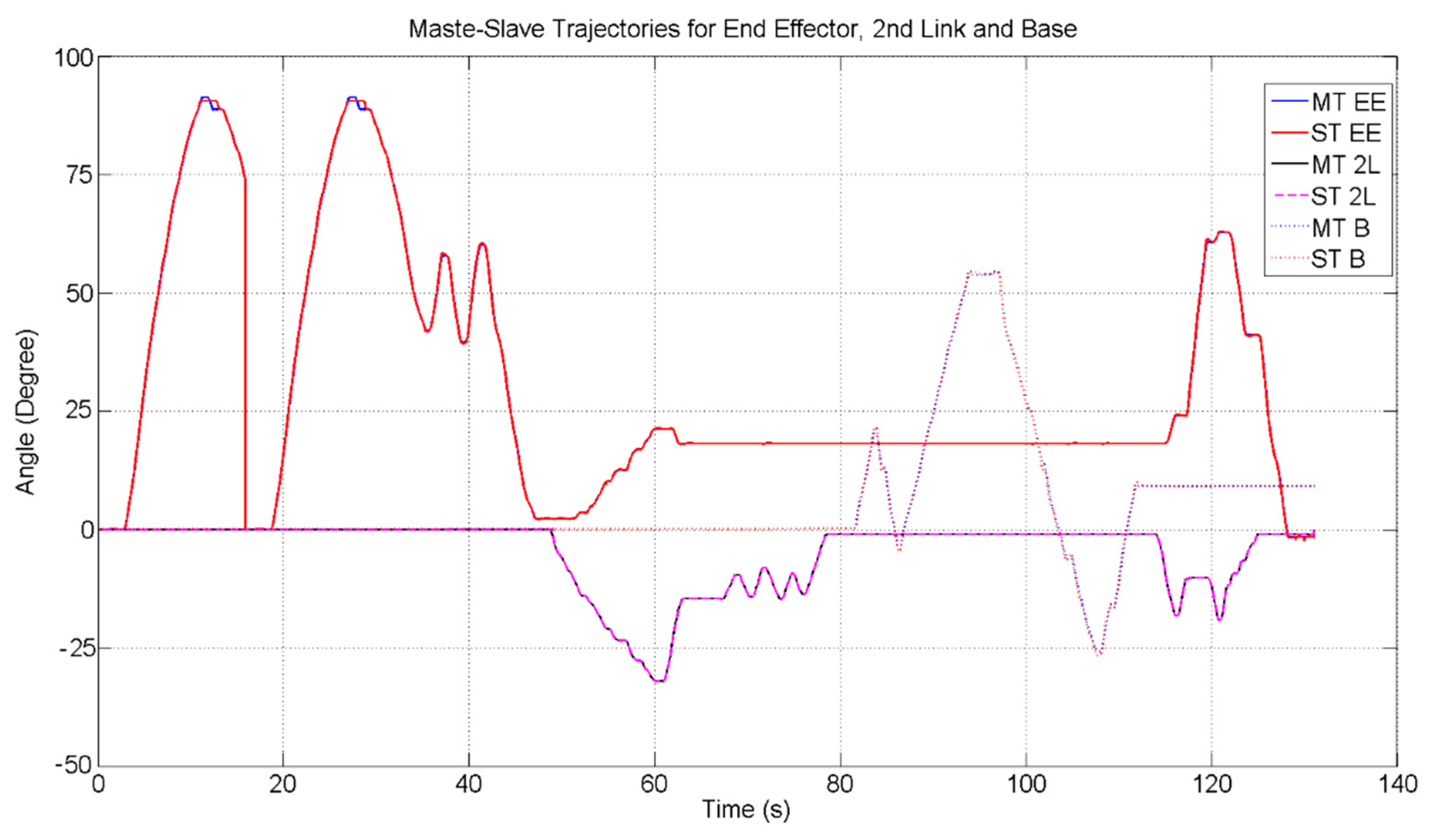
| 1 | End effector | 0.62 | 81 |
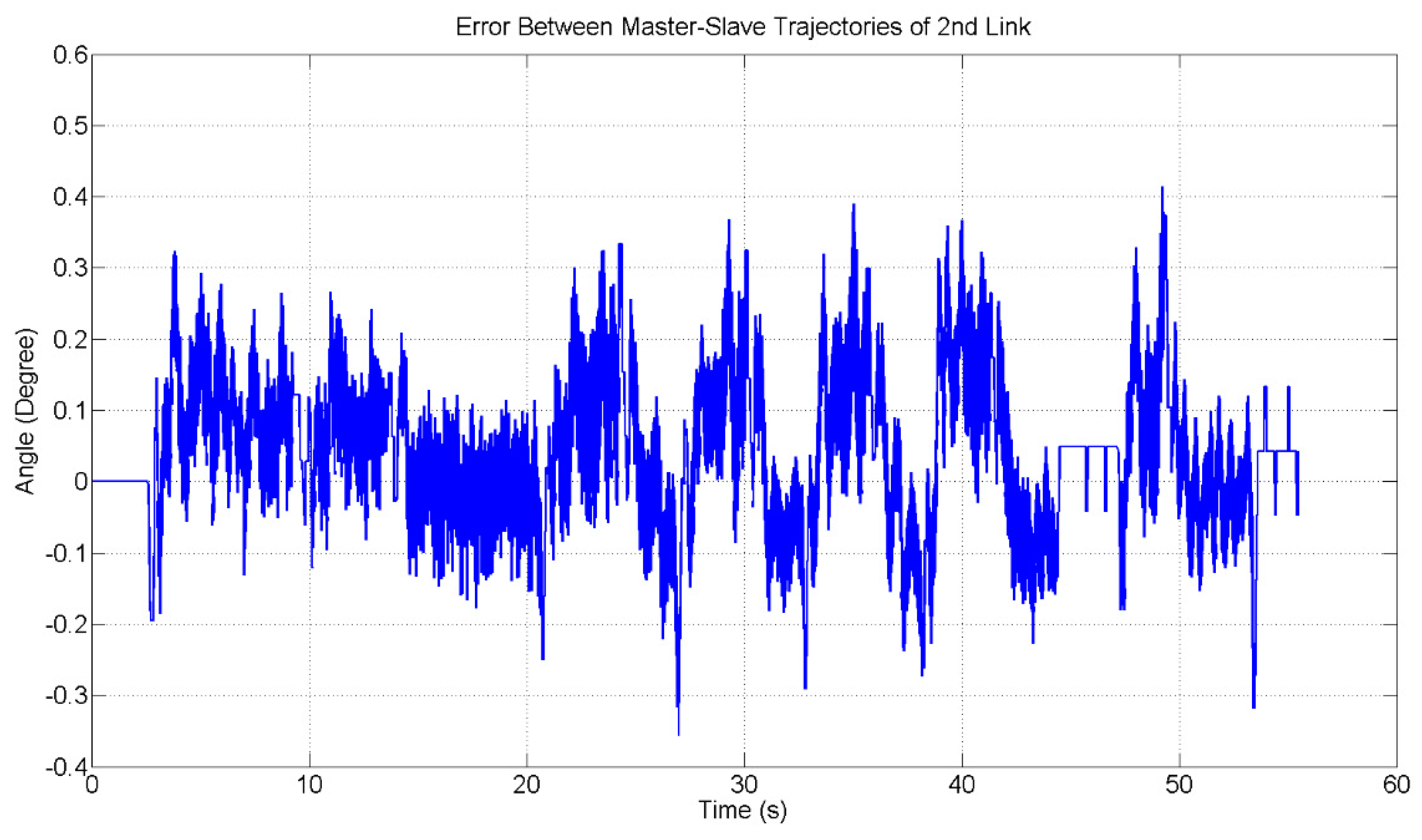
| 2 | Link 2 | 0.4 | 60 |
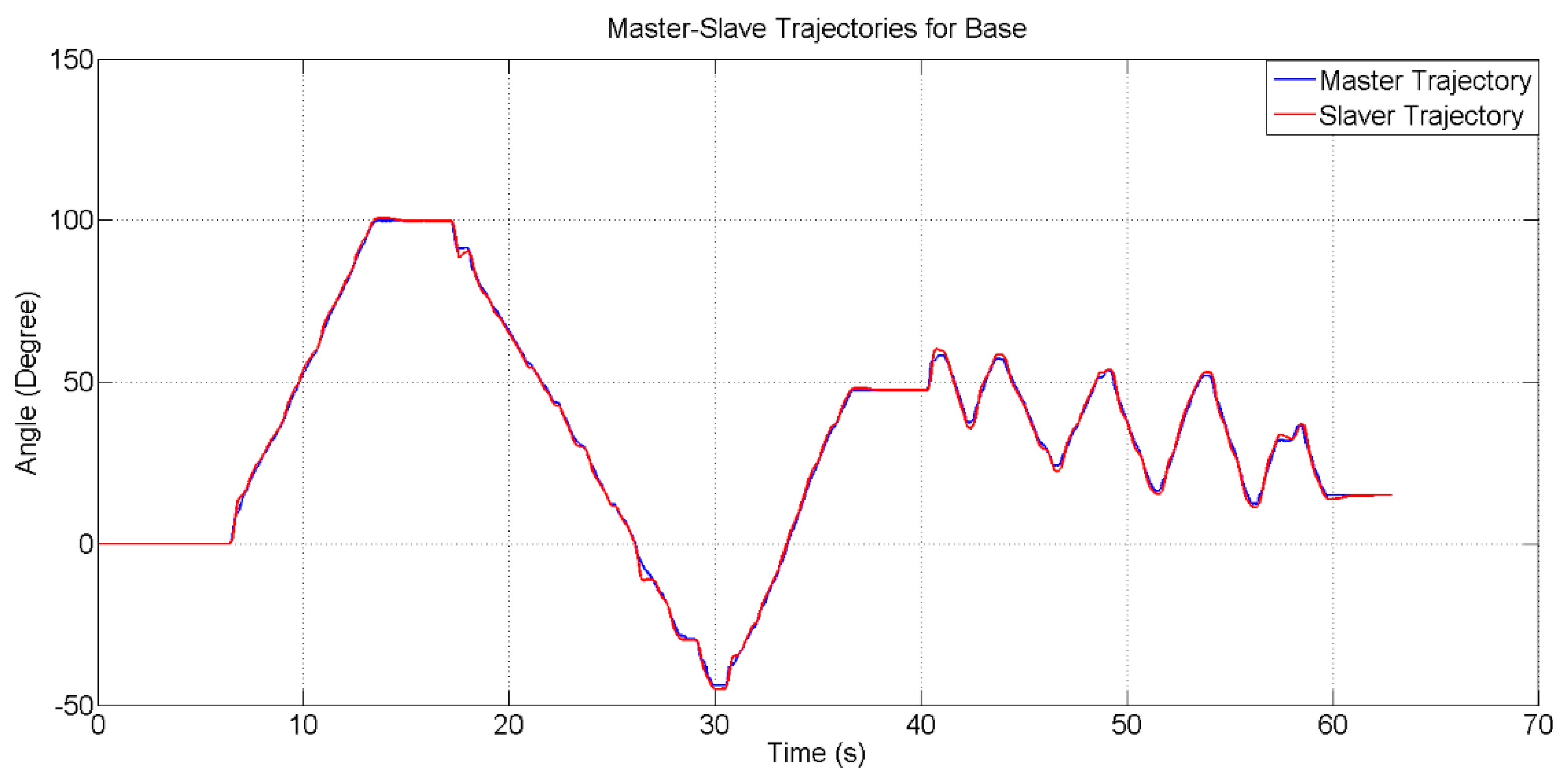
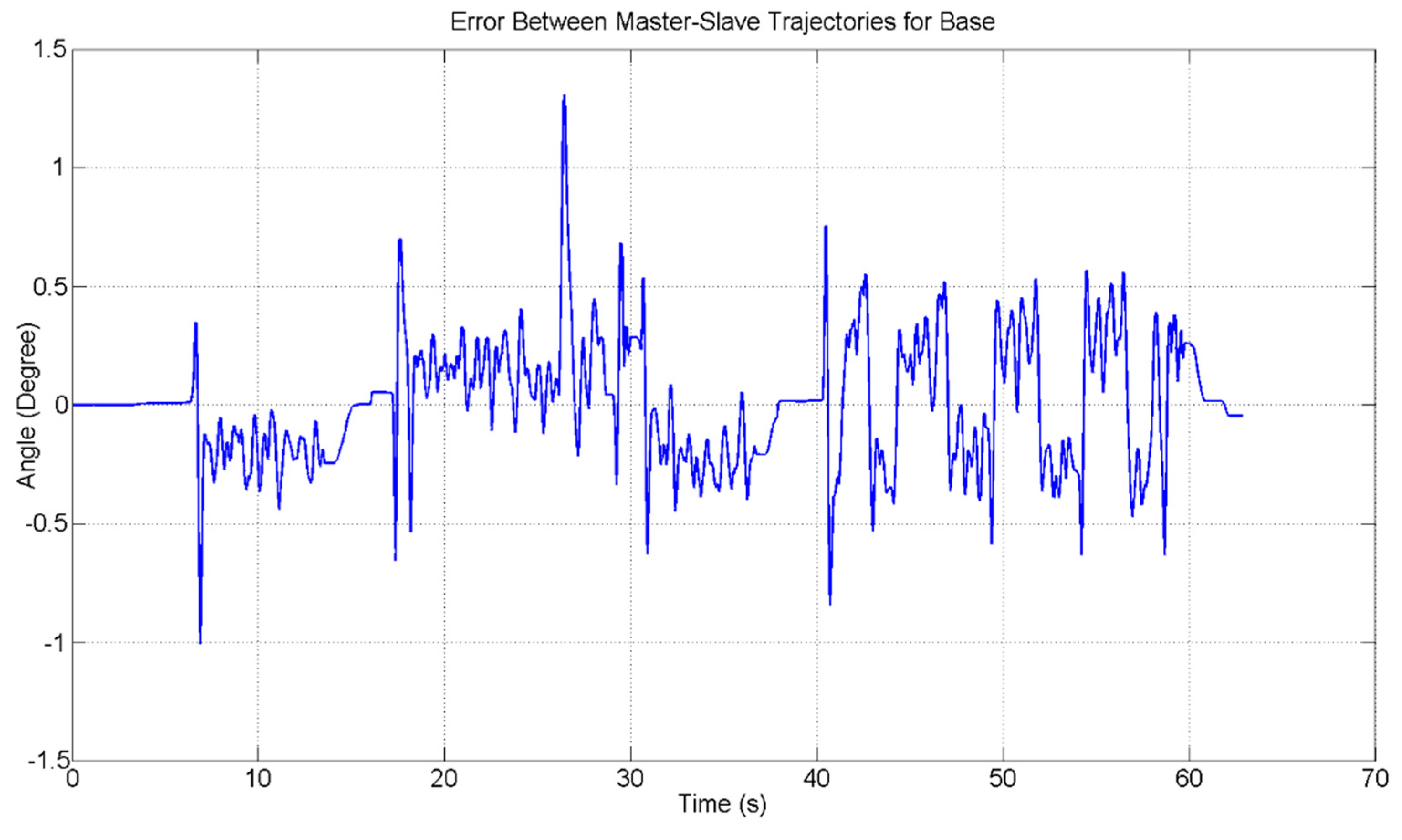
| 3 | Base | 1.3 | 100 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kallu, K.D.; Wang, J.; Abbasi, S.J.; Lee, M.C. Estimated Reaction Force-Based Bilateral Control between 3DOF Master and Hydraulic Slave Manipulators for Dismantlement. Electronics 2018, 7, 256. https://doi.org/10.3390/electronics7100256
Kallu KD, Wang J, Abbasi SJ, Lee MC. Estimated Reaction Force-Based Bilateral Control between 3DOF Master and Hydraulic Slave Manipulators for Dismantlement. Electronics. 2018; 7(10):256. https://doi.org/10.3390/electronics7100256
Chicago/Turabian StyleKallu, Karam Dad, Jie Wang, Saad Jamshed Abbasi, and Min Cheol Lee. 2018. "Estimated Reaction Force-Based Bilateral Control between 3DOF Master and Hydraulic Slave Manipulators for Dismantlement" Electronics 7, no. 10: 256. https://doi.org/10.3390/electronics7100256
APA StyleKallu, K. D., Wang, J., Abbasi, S. J., & Lee, M. C. (2018). Estimated Reaction Force-Based Bilateral Control between 3DOF Master and Hydraulic Slave Manipulators for Dismantlement. Electronics, 7(10), 256. https://doi.org/10.3390/electronics7100256