After the track optimization of each patch, the optimal combination of trajectories connecting each patch should also be considered to speed up the spraying speed of the spraying robot. The first step is to transform and model the TTOI problem. TTOI problem is represented by the Hamiltonian diagram. In the second step, the corresponding optimization algorithm is used to solve the TTOI problem. The third step, through simulation and spray painting experiments, verification, and comparison, identifies the advantages and effectiveness of the algorithm.
5.1. The Transformation and Modeling of Tool Trajectory Optimal Integration
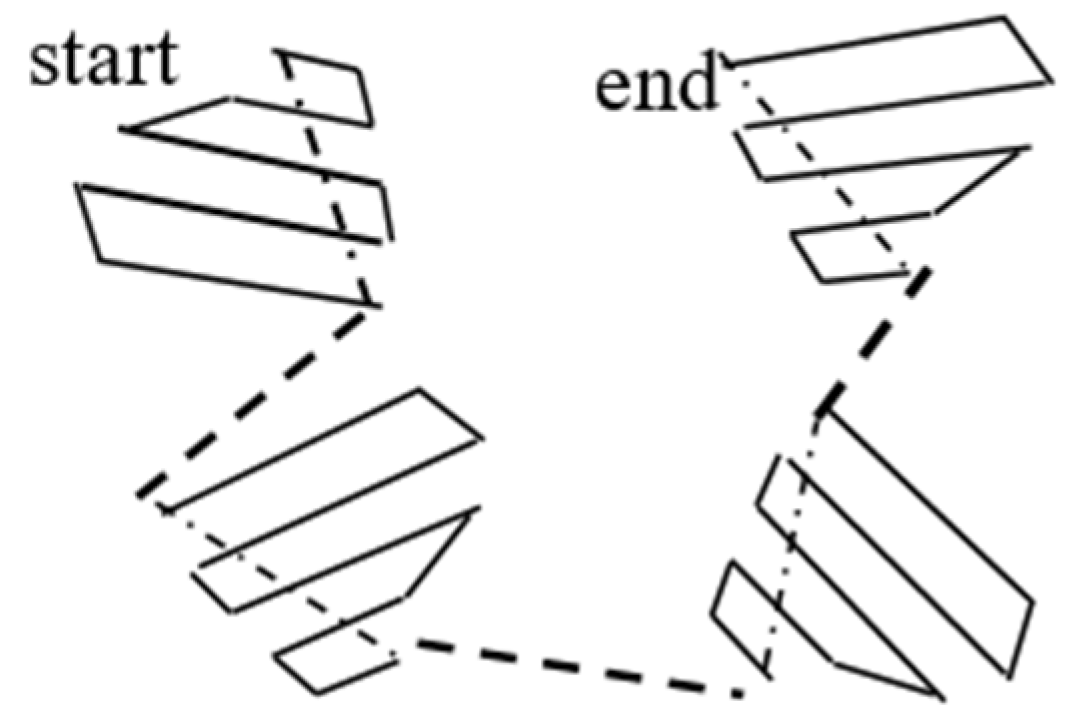
As is shown in the
Figure 4, the TTOI (tool trajectory optimal integration) on each patch after the 3D entity segmentation is expressed [
12]. To make the problem less complicated, the trajectories are considered as an edge. The ultimate purpose of the TTOI problem is to spray patches on the workpiece surface to make the spraying path of the robot the shortest. According to graph theory, a non-directional connection graph, G, is assumed (
V,
E,
R,
ω:
E→
Z+), among which
V denotes the vertex set,
E denotes the edge set,
R denotes any subset of
E, and
ω denotes the weight of the edge (the length of the actual spray path). The problem of TTOI is to find a path passing all edges only once with the shortest distance in graph, G. Similar to the traveling salesman problem (TSP), which is a common problem in the optimization problem, the TTOI problem is also a typical NP (non-polynomial) problem.
Suppose that D = {
dij} (
i, j = 1, 2, …,
n), the shortest distance between vertex
i and vertex
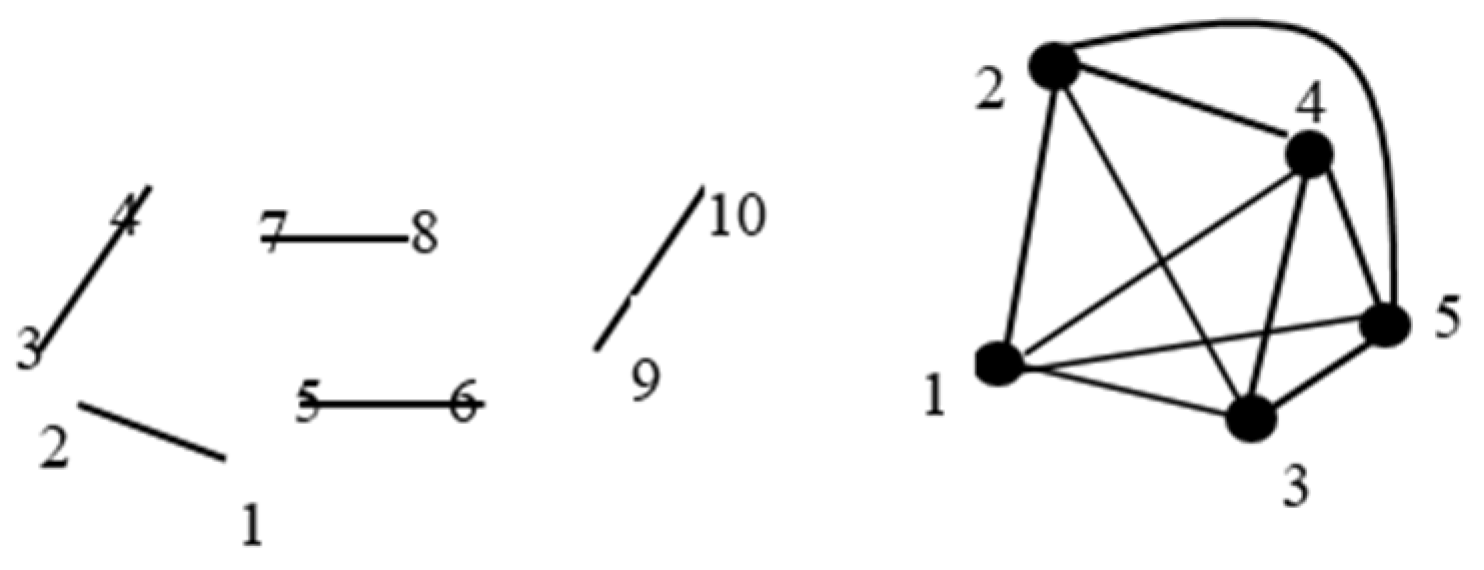
j, which are not on the same edge in graph G, the distance between the vertices can be calculated according to the Floyd algorithm. To make the problem less complicated, the TTOI problem can be expressed by the Hamiltonian method. As shown in
Figure 5, a vertex is used to represent an edge of the original graph G to form a complete Hamiltonian [
12]:
g (
VH,
EH,
ωH), among which
VH denotes the vertex set,
EH denotes the edge set, and
ωH denotes the weight of the edge and
ωH∈D. In the graph,
g, the weight of each edge is not fixed. Its value is determined by the order of vertices on the same edge in the original graph, G. Suppose that the order of the vertices set,
VH = {
v1,
v2……
vn}, in graph g is
T = (
t1,
t2……
tn)
ti∈
VH (
i = 1, 2, …,
n), and the TTOI problem can be defined as Equation (18):
where
ωi is the weight of the edges in the primitive graph, G, corresponding to vertices,
t1,
t2……
tn, in graph
g and
denotes the weight of the edge in graph
g. Since the weight,
ωi, of each edge in the original graph, G, is considered to be a fixed value in this problem, the above optimization problem can be reduced to Equation (12):
The spraying robot is the most complex one in the control of the industrial robot because of its many parameters. Especially, the trajectory optimization of the spraying robot on the complex surface makes the actual operation difficult. Therefore, finding the arrangement of all vertices in the Hamilton diagram makes the path, L, of the painting robot the shortest, which becomes a TTOI problem. Because of the large number of parameters, spray robots are the most complex control of industrial robots. Especially, the trajectory optimization of the spraying robot on the complex surface makes the actual operation difficult. Therefore, finding the arrangement of all vertices in the Hamilton diagram makes the shortest path, L, of the painting robot a TTOI problem. To solve the TTOI problem, the improved genetic algorithm, ant colony algorithm, and particle swarm optimization (PSO) proposed in this paper can be used to optimize the trajectory of a spraying robot on complex surfaces. In the process of fragmentation, these intelligent algorithms can solve the trajectory optimization problem between patches. For the first time, these intelligent algorithms have been used for spraying complex surfaces. The previous links between patches are random combinations. Finally, the advantages and disadvantages of each algorithm are illustrated by experiments.
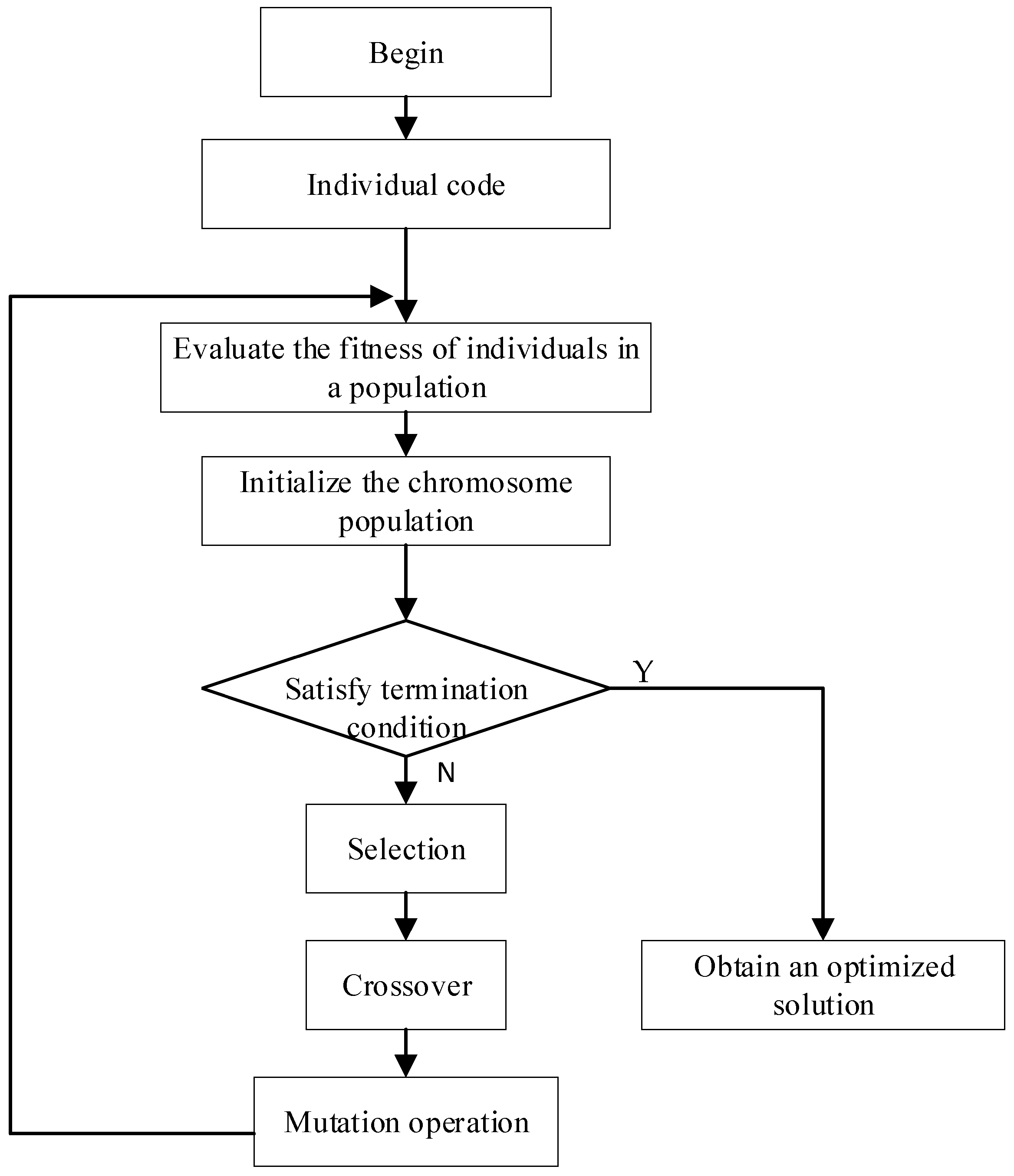
5.2. Solving the TTOI Problem with the Genetic Algorithm
Genetic algorithm (GA) is a method to search for the optimal solution by simulating the natural evolution process. Therefore, this algorithm has good effects on the NP (non-polynomial) problem in combinatorial optimization and can be used to solve the TTOI problem. According to the particularity of TTOI [
13,
14,
15], GA needs a special individual code and crossover, mutation, and other genetic manipulation methods.
(1) Individual code: The length of the individual code is ∣VH∣. Since each vertex in the Hamilton graph represents one edge of the original graph, G, to distinguish the start and end points of each edge. The individual code contains the binary code, Psi, representing the direction of each edge in the original graph, G.
(2) Fitness function: The values of fitness function are used to determine which individuals can enter the next round of evolution and which individuals need to be removed from the population. To facilitate the selection operation in the genetic algorithm, the optimization of the minimum value is usually converted to optimization of the maximum value, and the fitness function can be taken as: F = U − L, where U should be selected as an appropriate number, to make the fitness of all individuals positive. In the process of population evolution, to select the individuals with high fitness, the population size is maintained as the value, Psize. According to the fitness function rule, the Psize individuals with the highest fitness are passed to the next generation.
(3) Crossover: Crossover is the process of exchanging the partial codes between two individuals with a certain probability to generate new individuals. Here, order crossover (OX) is used on
Pi while two-point crossover is used on
Psi. OX ensures that the original order of each vertex is almost the same when the effective sequence of the individual itinerary is modified [
16]. The main idea of OX is: A conventional two-point crossover is performed, followed by an effective sequence modification of the individual itinerary. When modifying, the original relative access order of each point should be maintained as much as possible. Basic steps of OX are as follows:
(a) In the individual code strings, Px and Py, representing the spray painting order, the positions after the two loci, i and j, are randomly selected as the intersection. That is, each locus between the (i + 1)-th locus and the j-th locus is defined as an intersection area, and the contents of the intersection region are respectively memorized to Wx and Wy.
(b) According to the mapping relation in the intersection area, find all Pxq − Pxq (p = i + 1, i + 2, …, j) loci q in the individual Px and set them as vacancies. Find all Pxq − Pxq (p = i + 1, i + 2, …, j) loci, r, in the individual, Py, and set them as vacancies.
(c) The individuals, Px, Py, are left-shifted circularly until the first vacancy in the code string is moved to the left end of the intersection area. Then, all the vacancies are concentrated in the intersection area, and the original gene values in the intersection area are sequentially moved backward.
(d) Exchange the content in Wx and Wy and put them into the intersection area of individual Px, Py. The result is a new spray painting order.
(4) Mutation operation:Pi is subjected to inversion mutation to generate a new individual. A basic variation is applied to Psi, where one or more loci are randomly selected for individual code and the gene values of these loci are inverted.
Thus, the genetic algorithm of the TTOI problem is shown in
Figure 6.
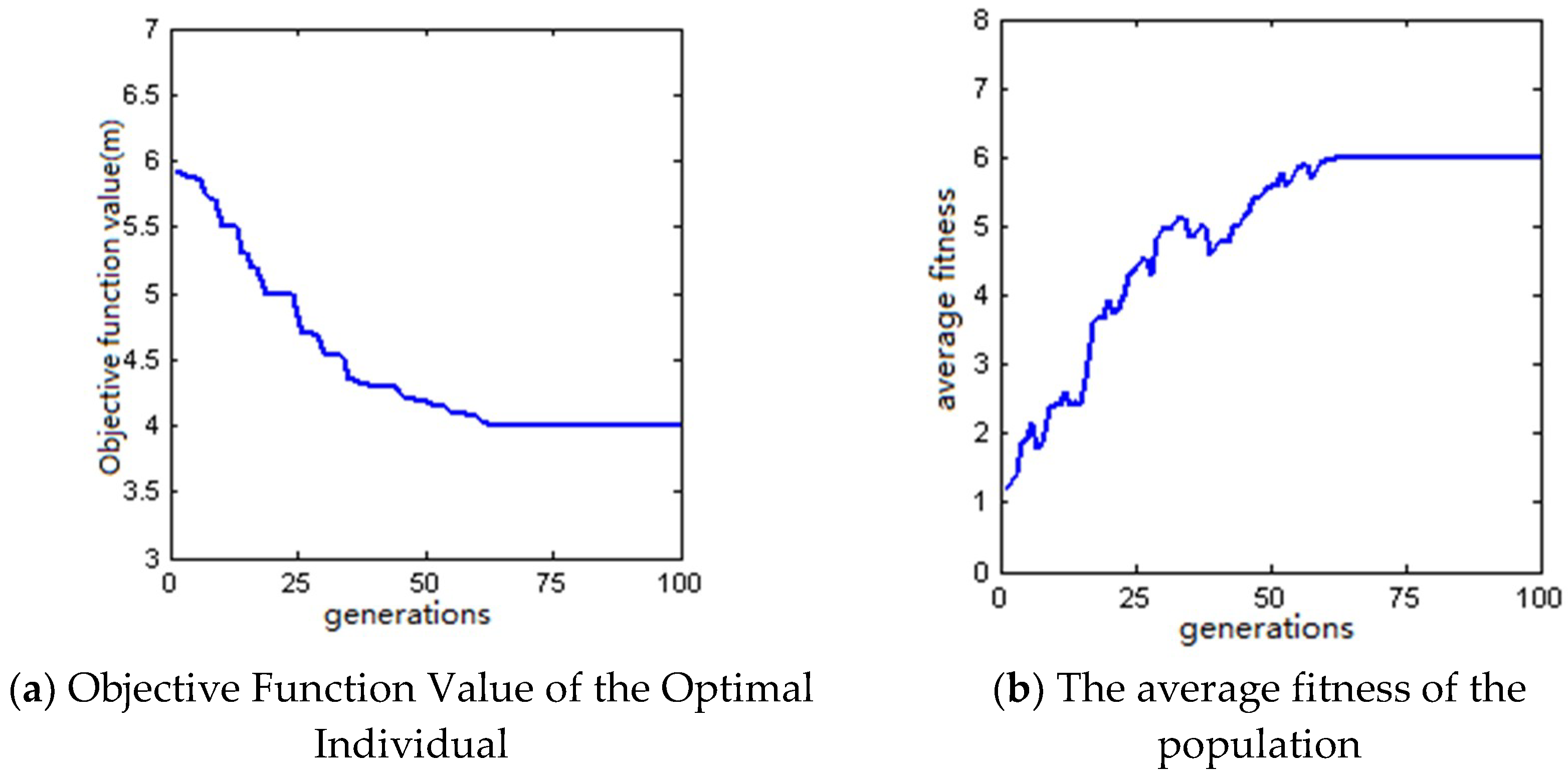
Taking 3D entities as spray objects, simulation experiments were carried out using genetic algorithm programming to verify the effectiveness of the TTOI problem. According to the segmentation method of the 3D entity, a 3D entity is divided into seven patches; that is, the individual code,
Pi and
Psi, are seven bits in the genetic algorithm. The parameters of the algorithm are as follows: Population size,
Psize = 100; crossover probability,
xrate = 0.20; mutation probability,
mrate = 0.05; and the maximum number of evolutionary generation,
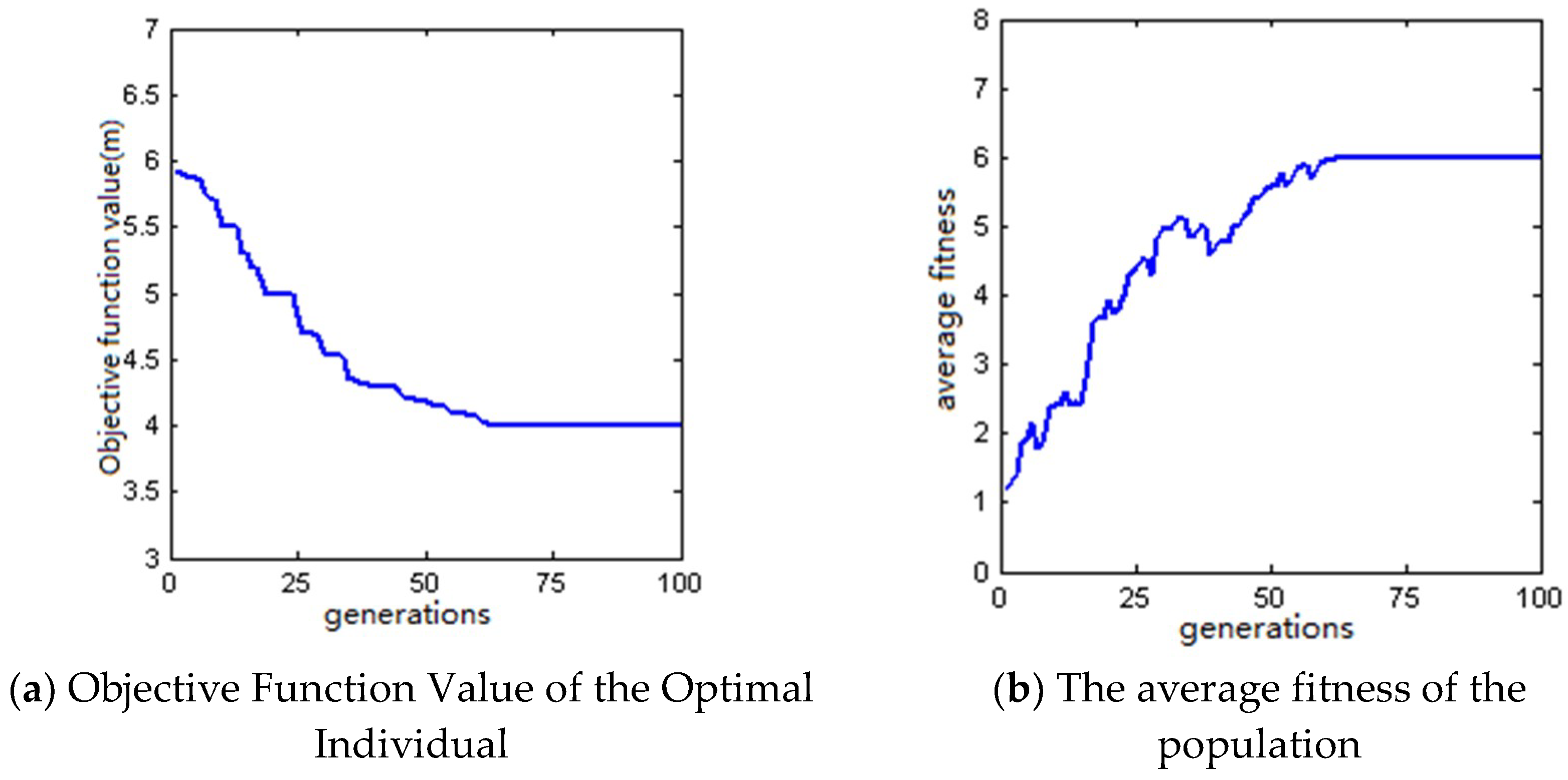
T = 100. The corresponding evolutionary processes of different solutions are shown in
Figure 7. As can be seen from the figure, the value of the objective function of the optimal individual decreases monotonously with the evolution process and eventually tends to be constant. After about 70 generations of evolution, the average fitness remains stable and the algorithm converges.
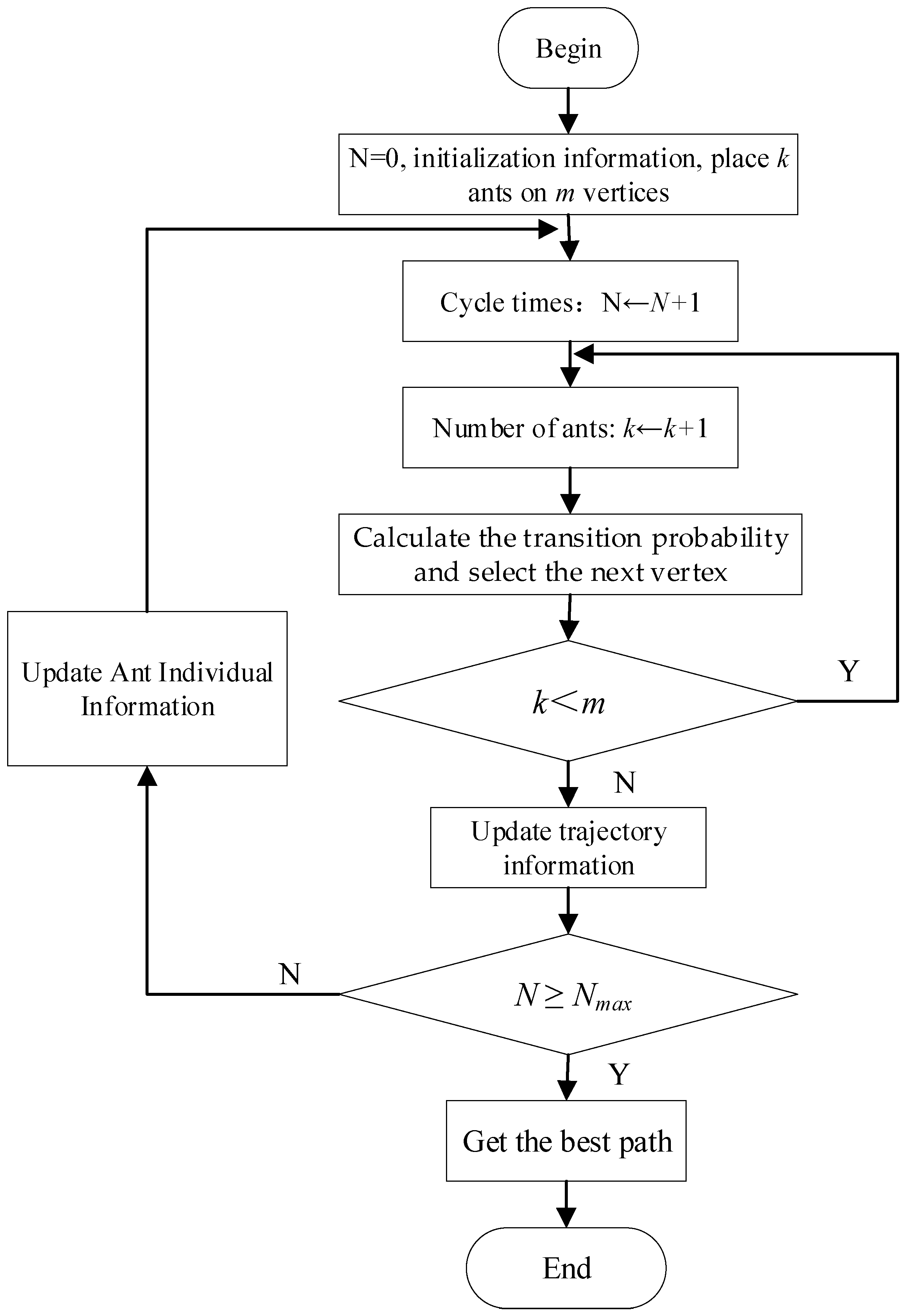
5.3. Solving the TTOI Problem with the Ant Colony Algorithm
Ant colony optimization (ACO) is a probabilistic intelligent algorithm for finding the optimal path. It originated from the behavior of ants to find the path in the process of searching for food. It has strong anti-interference ability, strong compatibility, and other characteristics. The algorithm initializes the following individual information: Not visited vertices (NVV), not visited edges (NVE), visited edges (VE), and tour length (TL). Through the memory function of the population, individual information is constantly updated and adjusted. Taking the connection graph, G, shown in
Figure 5 as an example, if the algorithm starts when the ant is at the vertex, 1, the initialization information is:
After time, Δ
t, the pheromone on trajectory (
i,
j)
i adjusted as follows:
where
ρ represents the volatilization rate of pheromone,
represents the accumulation amount of pheromone on the track (
i,
j) at time
t,
represents the increment of the pheromone on the trajectory (
i,
j) after the time, Δ
t, which can be calculated as follows:
denotes the pheromone on the trajectory (
i,
j) during the searching process of the
k-th ant, the expression of which is:
Among which,
Q is a constant. The pheromones on each trajectory during initialization are:
= 0. At the time,
t, the transition probability of an ant,
k, from vertex
x to other feasible vertices is:
where
denotes the visibility on track (
i,
j), which reflects the degree of heuristic from vertex
i to vertex
j. Here, let
,
dij is the distance from vertex
i to vertex
j. The parameters,
α and
β, denote the influence weights of
and
on the whole transition probability.
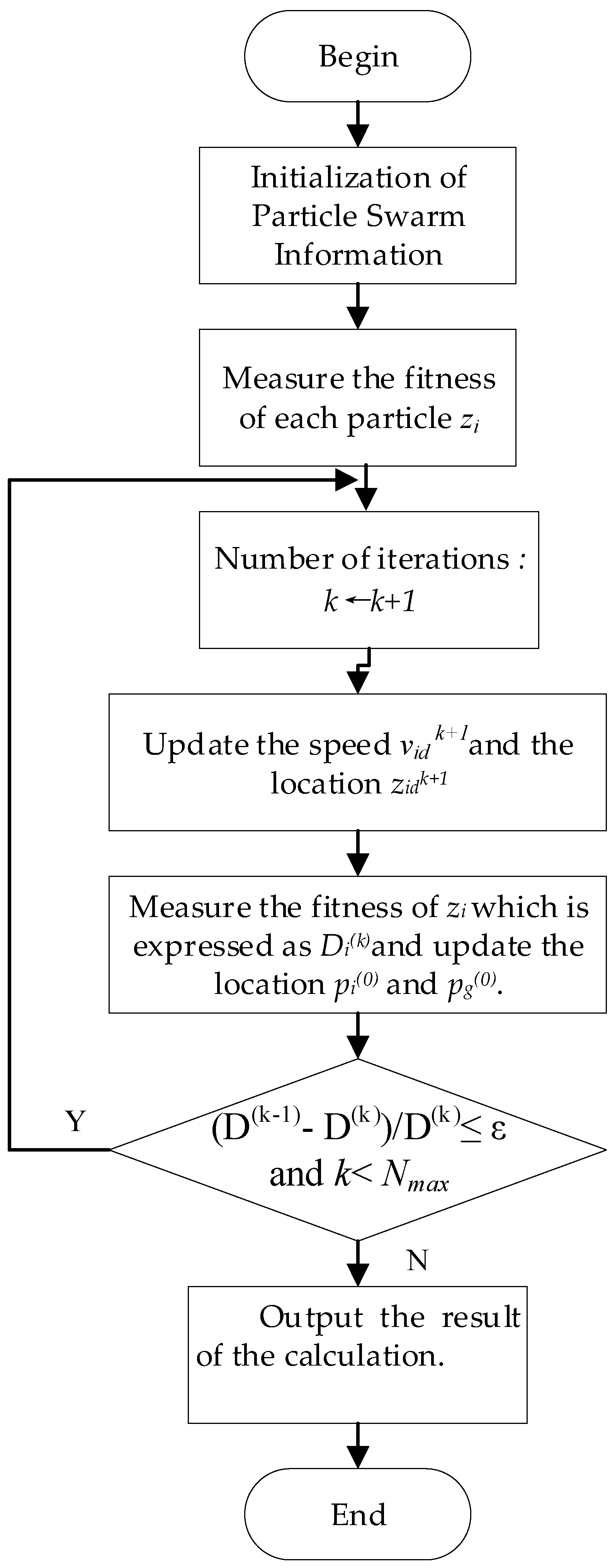
denotes the feasible neighborhood of the ant k at vertex i (end of the edge in the list NVE). Thus, the ant colony algorithm of the TTOI problem is shown in
Figure 8.
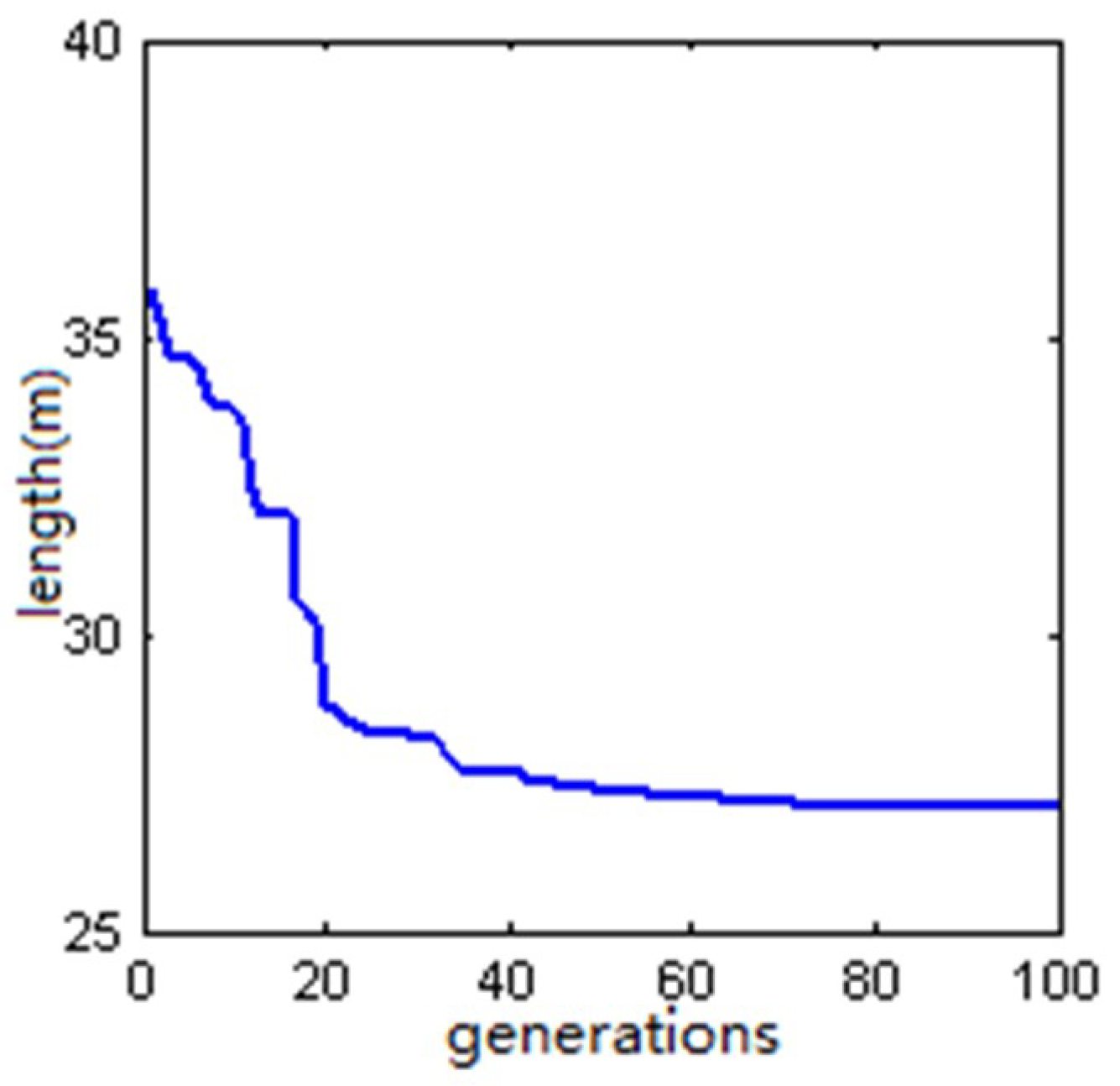
In the following, the validity of using ACO to solve the TTOI problem is verified by simulation experiments. Assuming that a 3D entity workpiece is divided into five patches, the number of edges in the connected graph, G, is five and the number of vertices is
m = 10. The parameters of the algorithm are chosen as follows:
α = 1,
β = 5,
ρ = 0.5,
Q = 100 and the maximum number of cycles is
Nmax = 100.
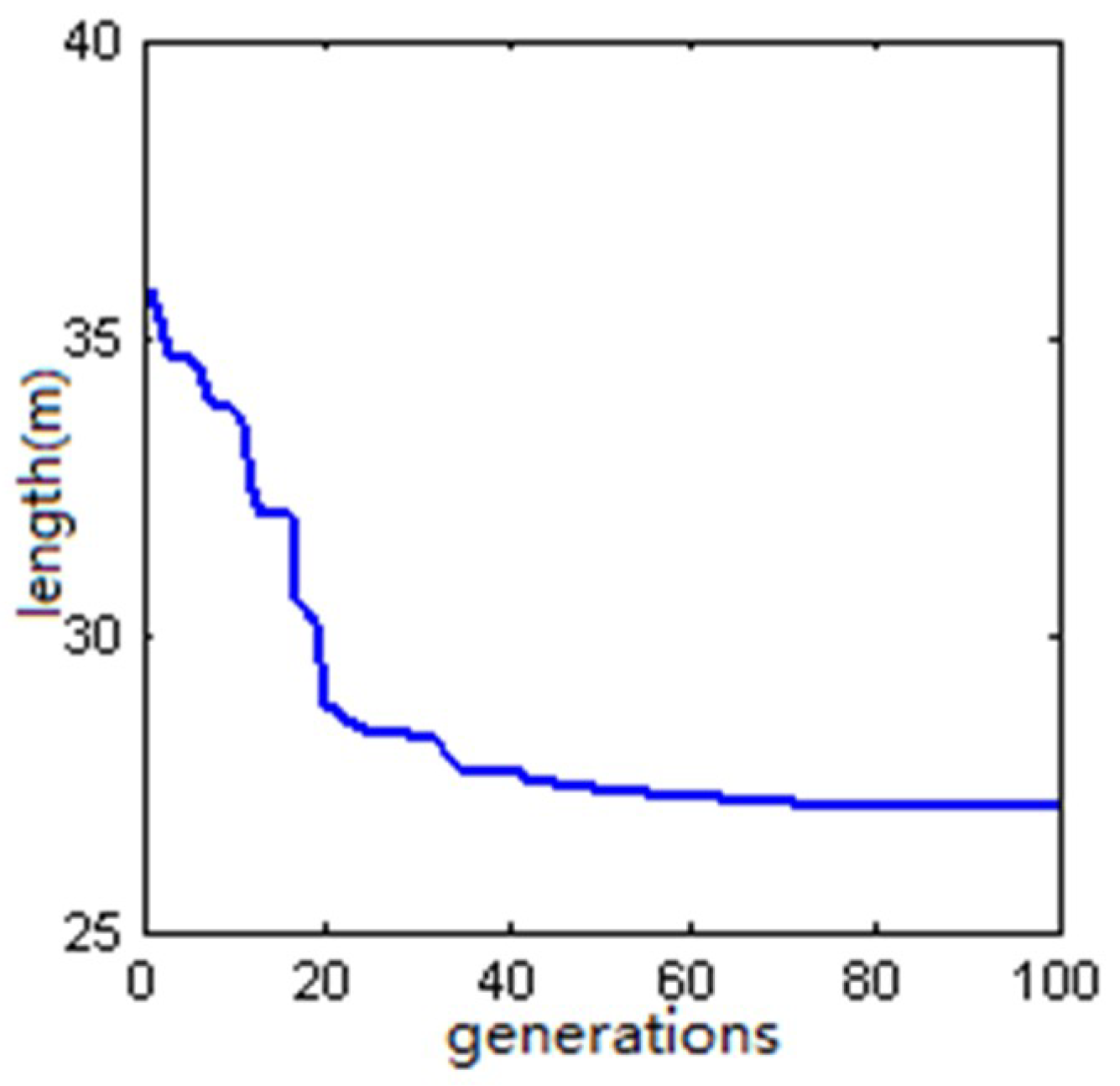
Figure 9 shows the evolution of the optimal solution obtained from the algorithm. It can be seen from the figure that the length of the spray painting trajectory decreases monotonically with the evolutionary process. After about 70 generations of evolution, the length of the trajectory no longer changes and the algorithm converges.
5.4. Solving the TTOI Problem with Particle Swarm Optimization
Particle swarm optimization (PSO) is easy to implement and there is no need to adjust a lot of parameters compared with other optimization algorithms. Also, it does not need gradient information, which is an effective tool to solve the optimal combination [
17,
18,
19]. In the algorithm, each individual is a particle, and each particle represents a potential solution. Assuming that
is the D-dimensional position vector of the i-th particle, the current fitness value of
can be calculated according to the fitness function so that the position of the particle can be measured. The process of calculating the minimum length of the spray path length can be selected as the fitness function in the TTOI problem.
is the flying speed of particle i; that is, the distance of particle movement.
is the optimal position of the particle to date.
is the optimal position of the particle swarm to date. In each iteration, the velocity and position of the particles can be updated according to:
where
i = 1, 2, …,
m,
d = 1, 2…
D,
r1 and
r2 are random numbers between [0, 1], and
c1 and
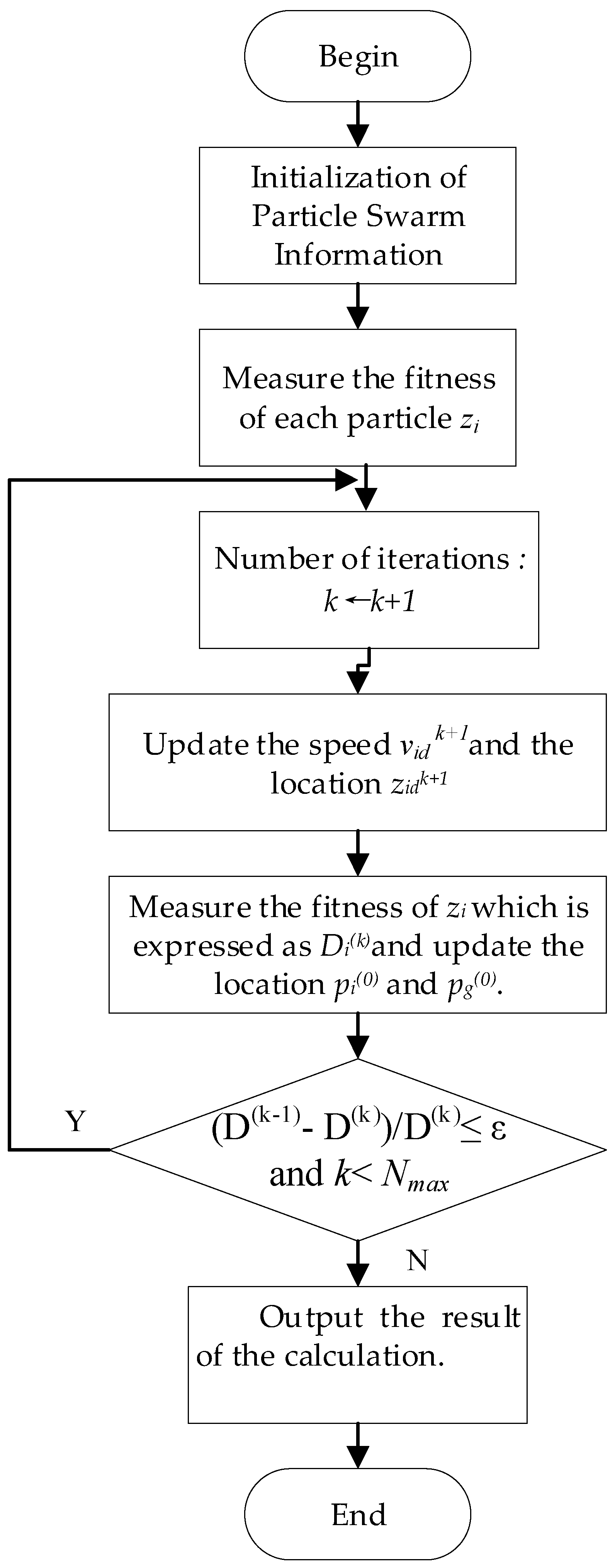
c2 are learning factors. Thus, the particle swarm algorithm of the TTOI problem is shown in the
Figure 10.
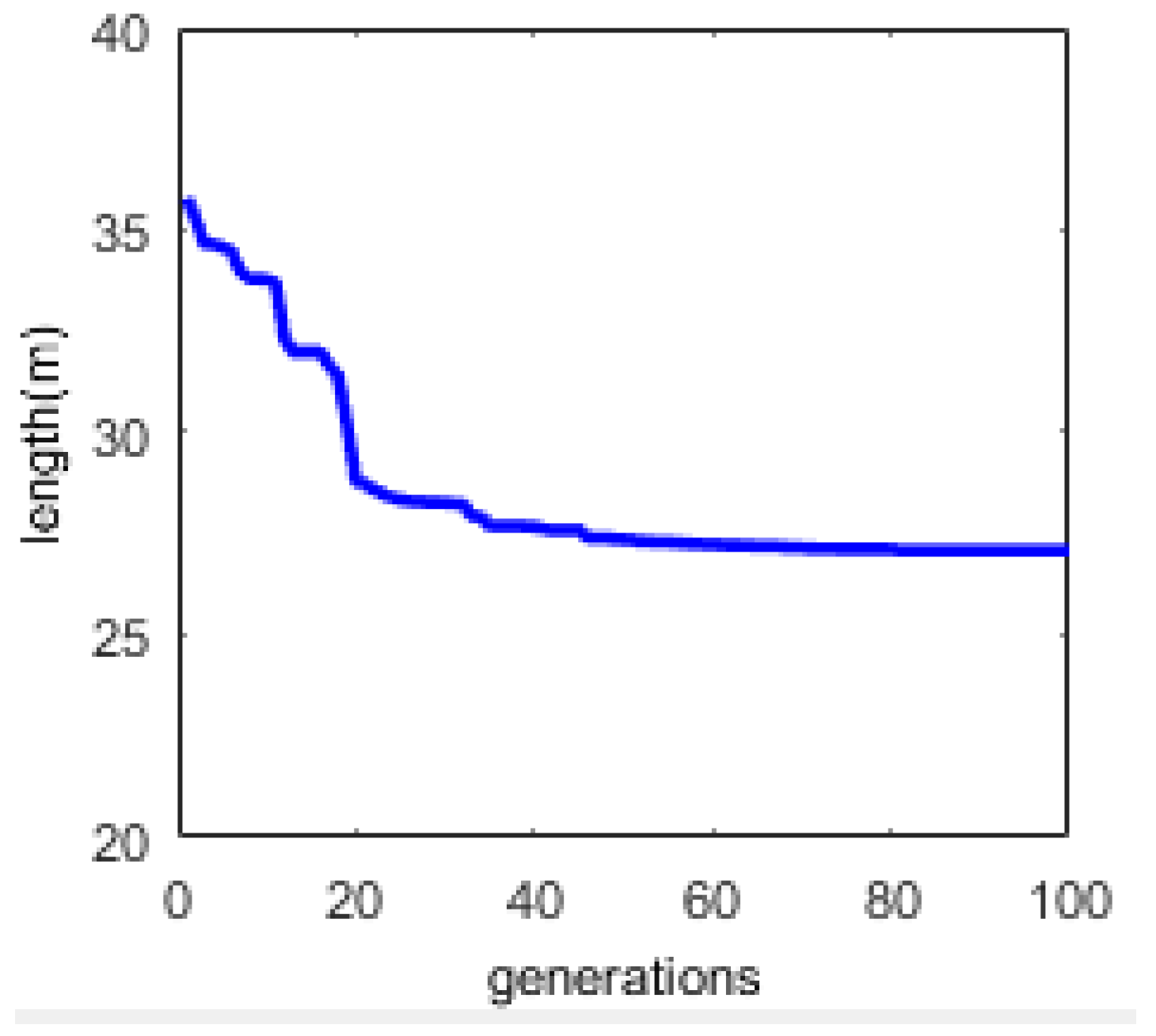
Assuming that the 3D entity artifact is divided into five patches, the number of edges in the connection graph, G, shown in
Figure 5 is five and the number of vertices is
m = 10. To guarantee the precision of the algorithm, the maximum number of cycles is
Nmax = 100. To ensure that the particle does not skip the optimal solution and can search the search space sufficiently, let
ε = 1000. To ensure accuracy and reduce the amount of calculation, take the number of particles as 20. The learning factors,
c1 and
c2, can make the particles have self-summary and the ability to learn from the outstanding individuals in the group, to be close to the best in their own history and the history within the group. These two parameters have little effect on the convergence of the algorithm, but if we adjust these two parameters properly, we can reach the convergence faster. After adjusting the values of
c1 and
c2 several times and analyzing the effect of
c1 and
c2 on the optimal fitness, we can conclude that
c1 =
c2 = 2 is a better choice for the TTOI problem.
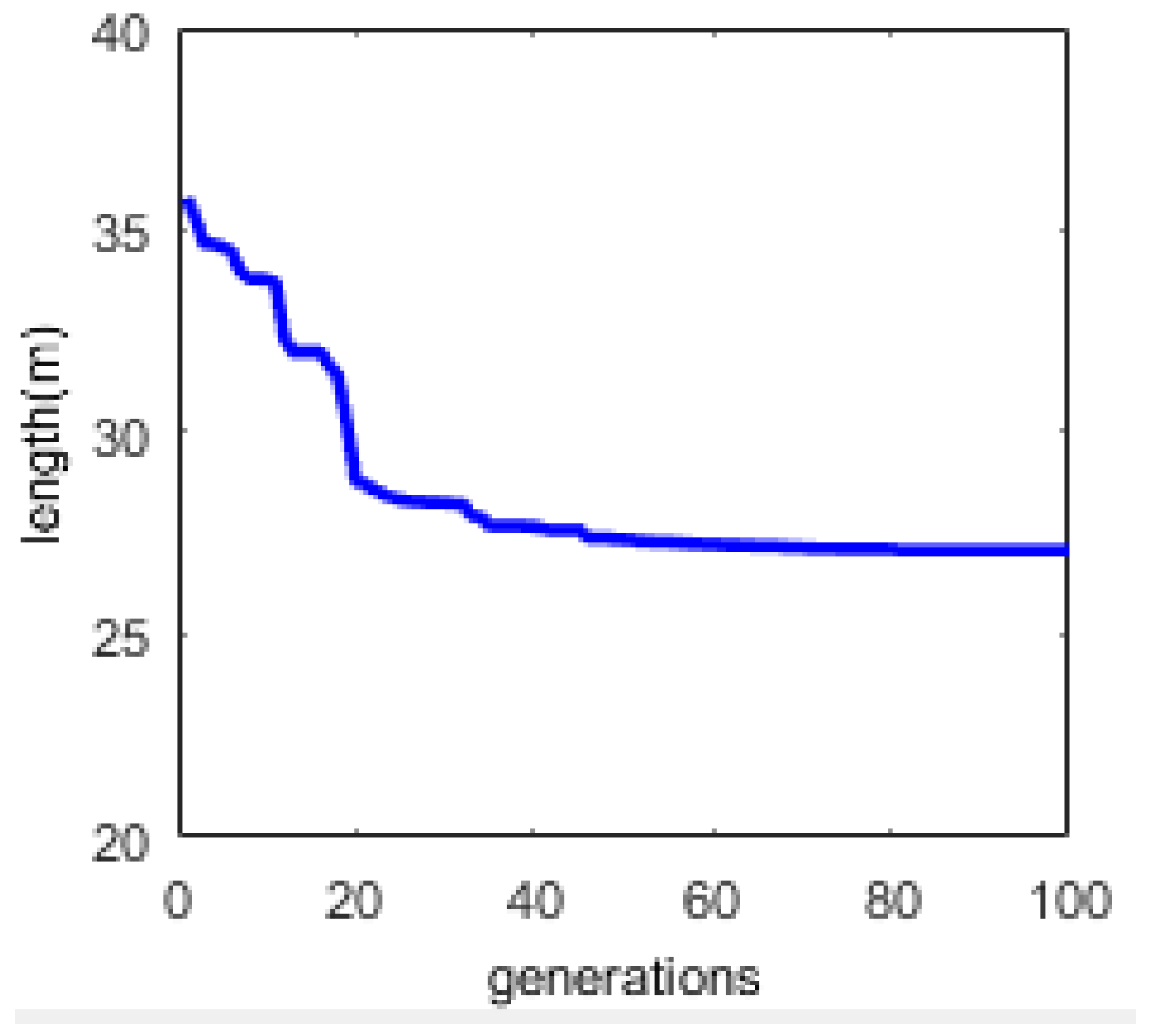
Figure 11 shows the evolution of the optimal solution obtained from the algorithm. It can be seen from the figure that the length of the spray painting trajectory decreases monotonously with the evolutionary process, and finally tends to a definite value. As the spray painting robot does not consider the obstacle avoidance during the working process, the environment information is known and is relatively simple, so the particle swarm algorithm converges faster. It can be seen from
Figure 11 that after about 80 generations of evolution, the length of the spray painting trajectory does not change and the algorithm converges.
5.5. Comparison of Algorithms
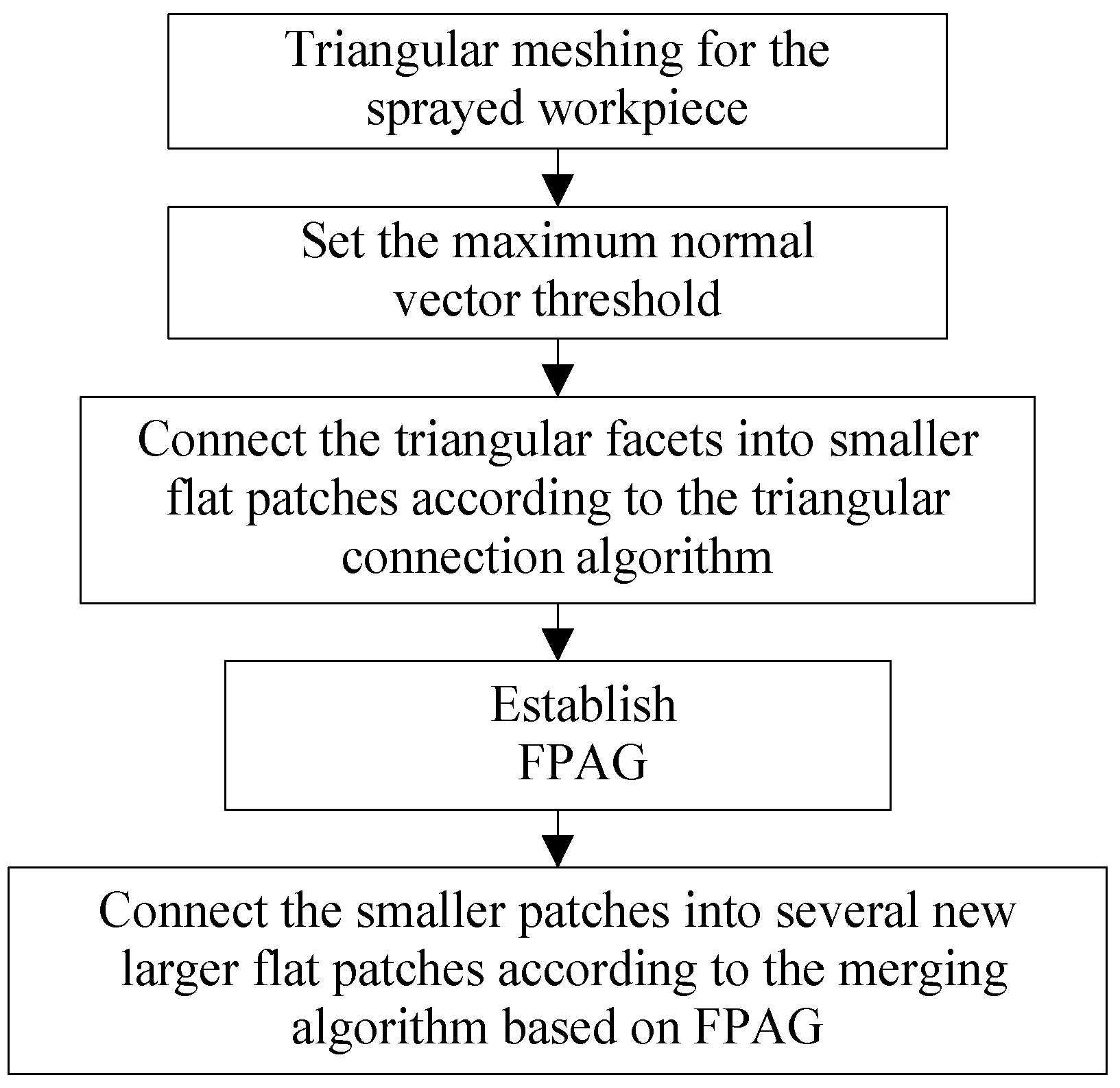
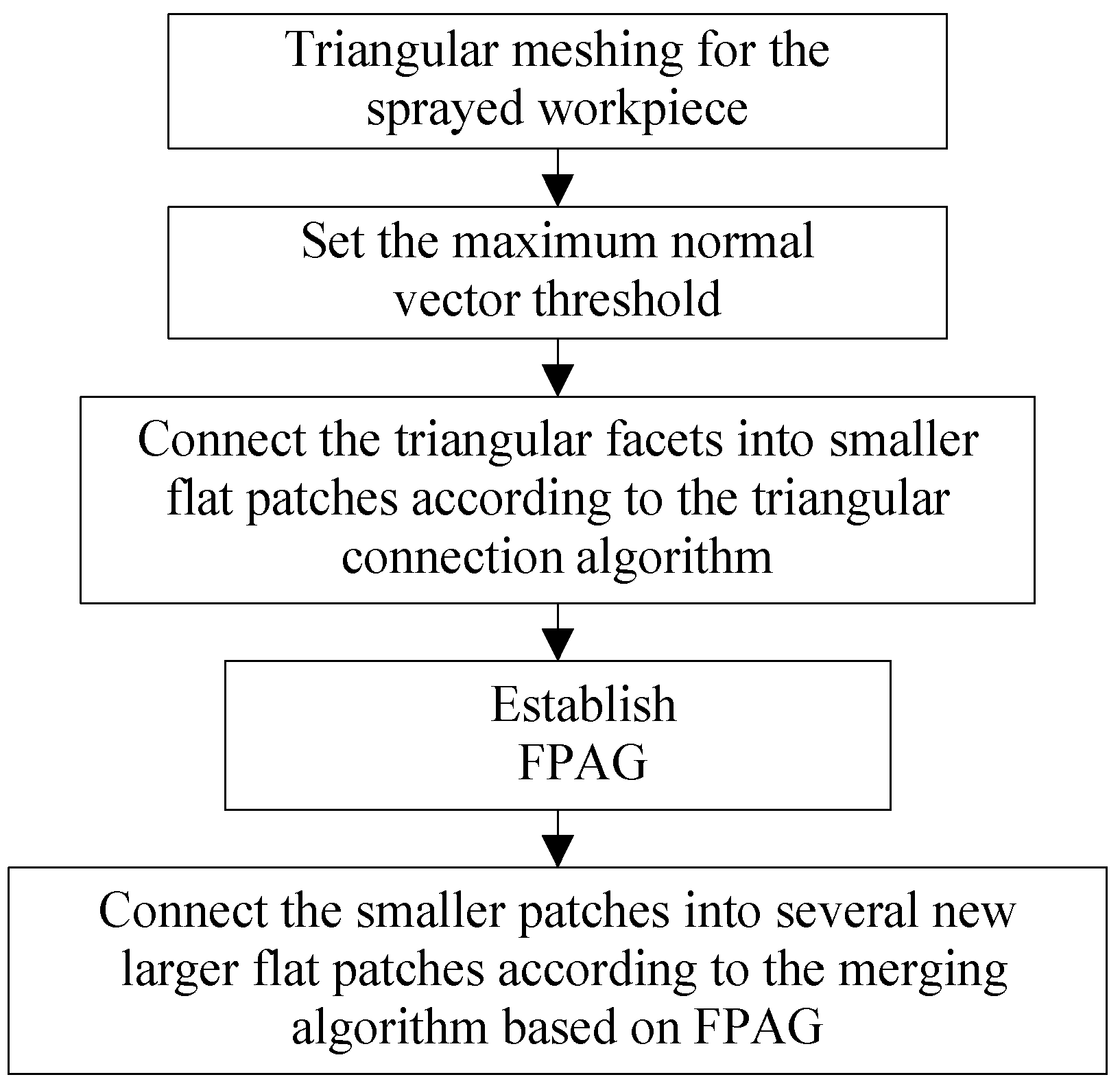
In this paper, according to the built coating accumulation model: The finite range model, then FPAG (flat patch adjacency graph) is used to treat spraying workpiece, and the workpiece surface is divided into numerous patches. In each patch, the trajectory optimization algorithm in part 3 is used to obtain the trajectory. Finally, the genetic algorithm, ant colony algorithm, and particle swarm optimization algorithm are respectively used to obtain the optimal path to connect all patches to complete the spraying work. Assuming the ideal paint thickness of
qd = 50 μm, the maximum allowable deviation of paint thickness of
qw = 10 μm, the bottom radius of the cone paint sprayed by the gun is
R = 60 mm. The cumulative rate of the paint is obtained from the spray test data on the plate [
12]:
After generating and optimizing the spray painting trajectories on the plate, the spray painting rate (at uniform speed) and the width of the overlapping area of the paint for each of the two spray strokes are obtained, which are v = 256.3 mm/s, d = 50.2 mm, respectively.
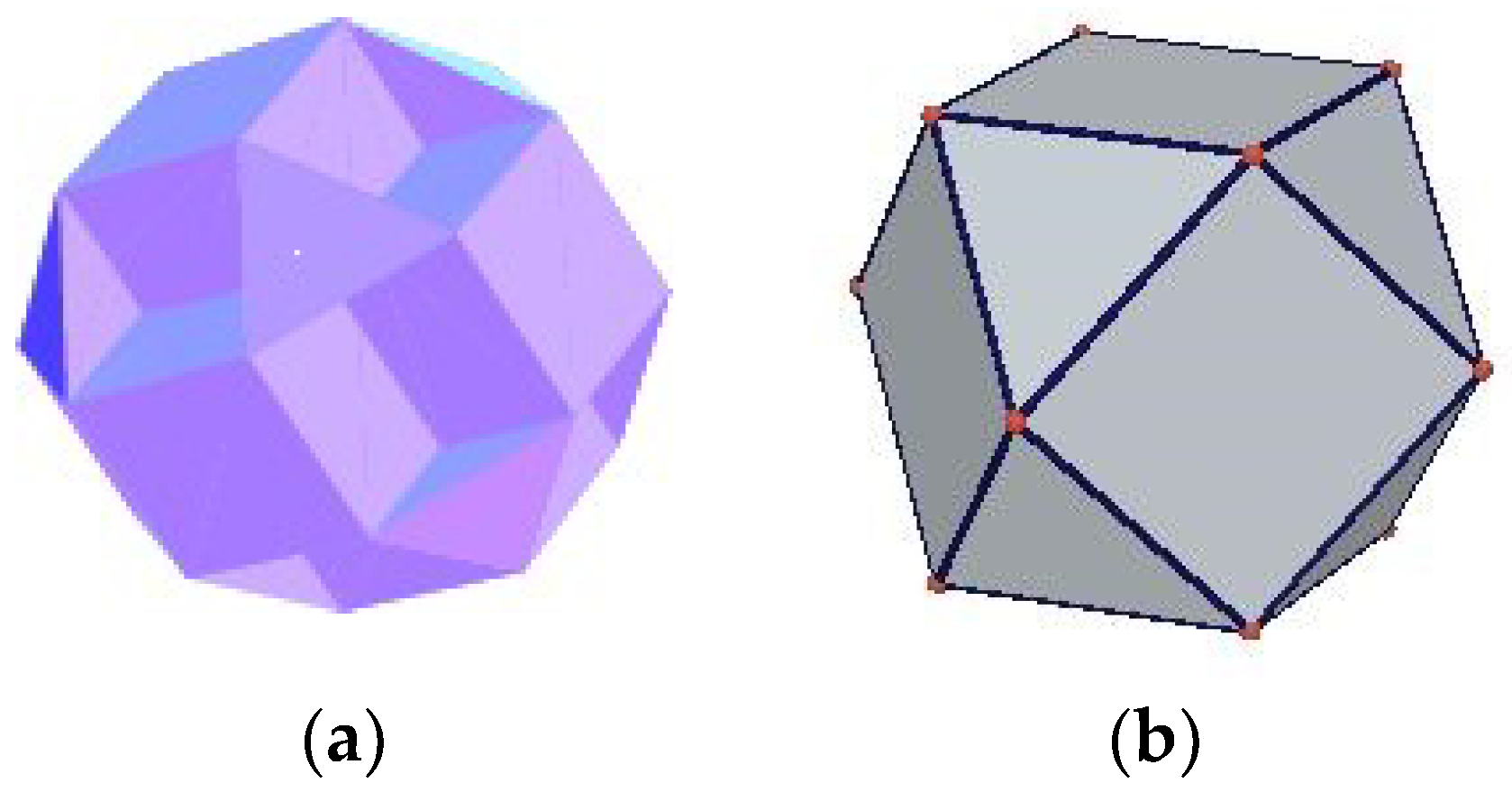
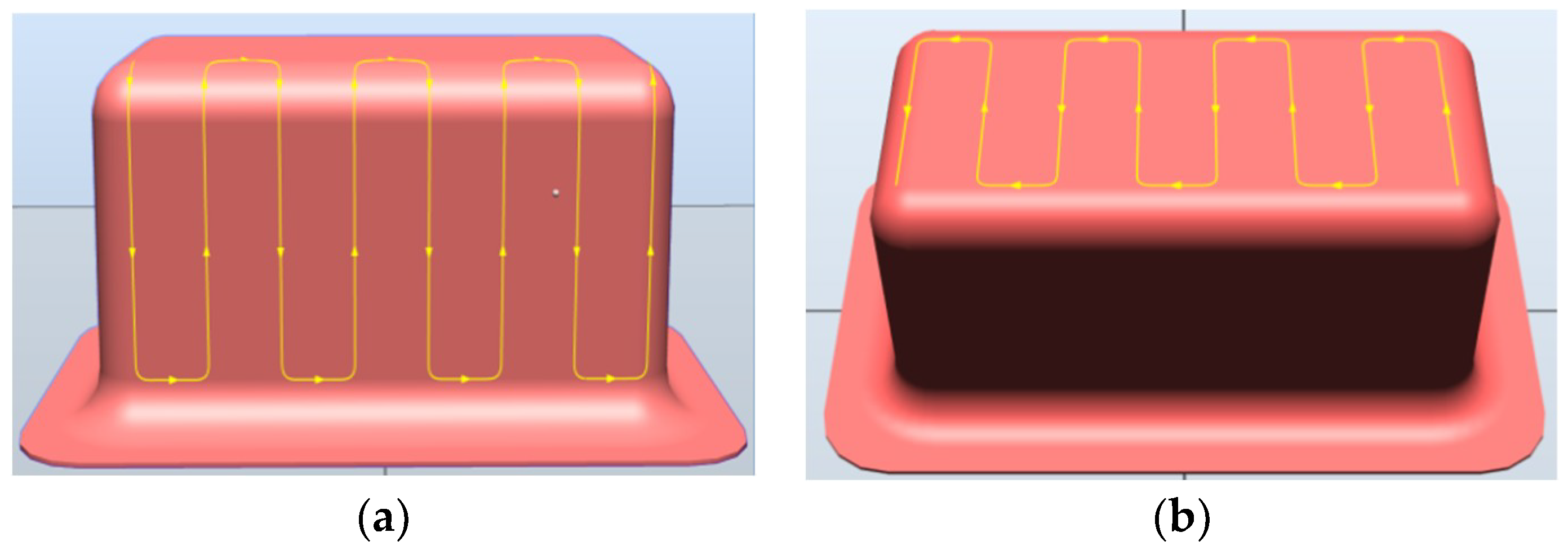
As shown in
Figure 12, taking the experimental workpiece as an example, the workpiece can be regarded as a 3D entity. In the experiment, suppose the vertical distance from the gun to the workpiece surface is H, the bias algorithm can be used to obtain the spray path. Each spray parameter setting in the optimal algorithm of the spray painting trajectory are as follows: The ideal paint thickness is
qd = 50 μm, the maximum allowable deviation of thickness is
qw =
10 μm, the spray radius is
R = 60 mm, the spray distance is
H = 100 mm, and the velocity of the spray is
v = 256.3 mm/s. The workpiece surface is divided into five patches after the modeling work and the path at the junction of the two patches is the PA-PA mode. GA, ACO, and PSO are used to carry out experiments when solving the TTOI. The parameters of the GA algorithm are set as: Population size is
Psize = 100, crossover probability is
xrate = 0.20, mutation probability is
mrate = 0.05, and the maximum number of evolutionary generation is
T = 100. The parameters of the ACO algorithm are set as: The number of ants is
m = 10, parameter
α = 1, parameter
β = 5, the volatilization rate of the pheromone is
ρ = 0.5, constant
Q = 100, and the maximum number of iterations is
Nmax = 100. The parameters of the PSO algorithm are set as: The maximum speed threshold is
ε = 1000, the number of particles is 20, learning factors are
c1 =
c2 = 2, and the maximum number of iterations is
Nmax = 100.
The self-developed offline programming system of the spray painting robot is used for the spray test [
20,
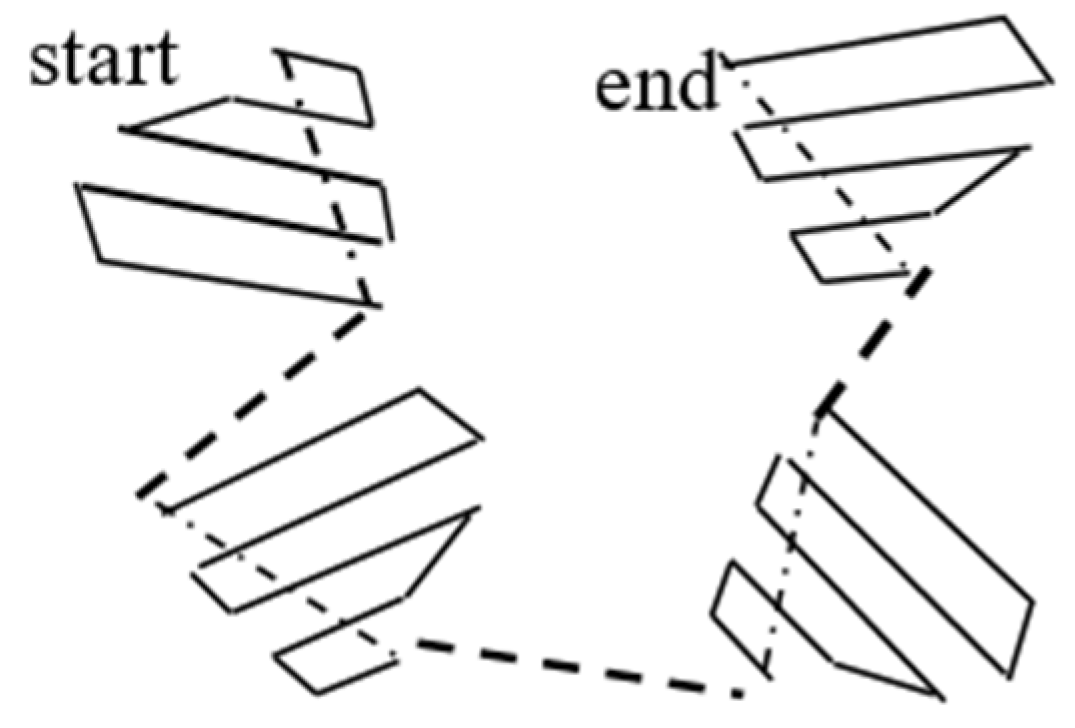
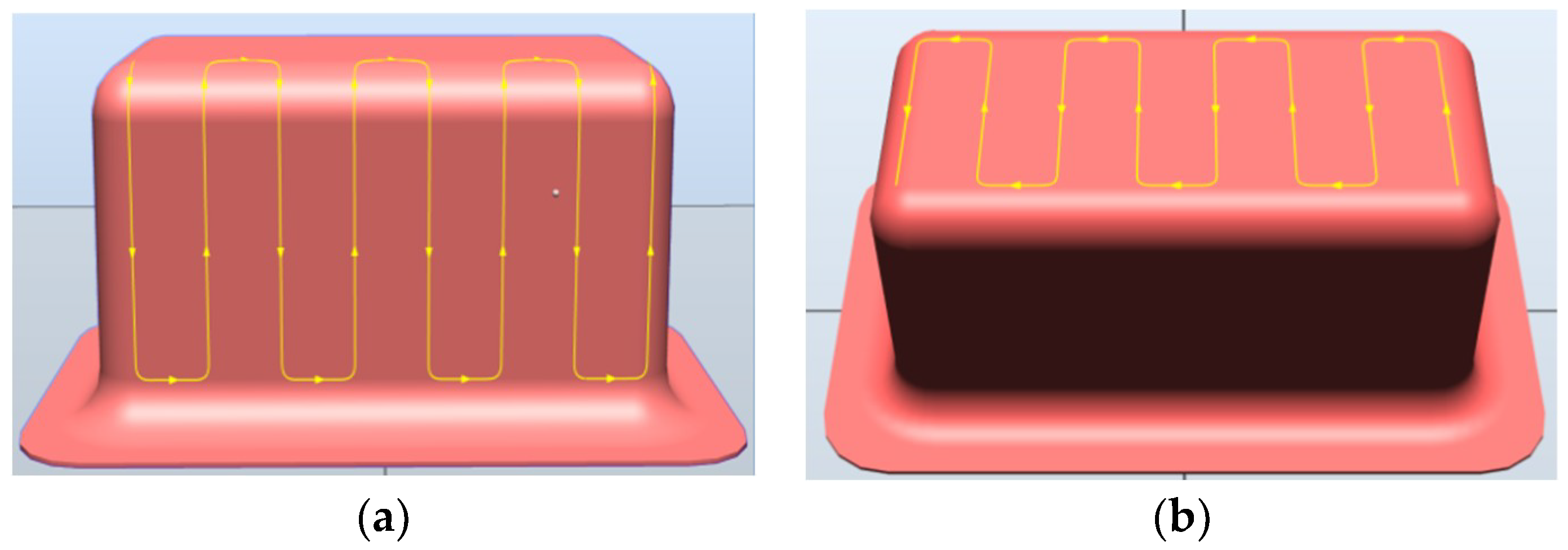
21]. The part of the optimized trajectories of different patches on the workpiece surface are shown in
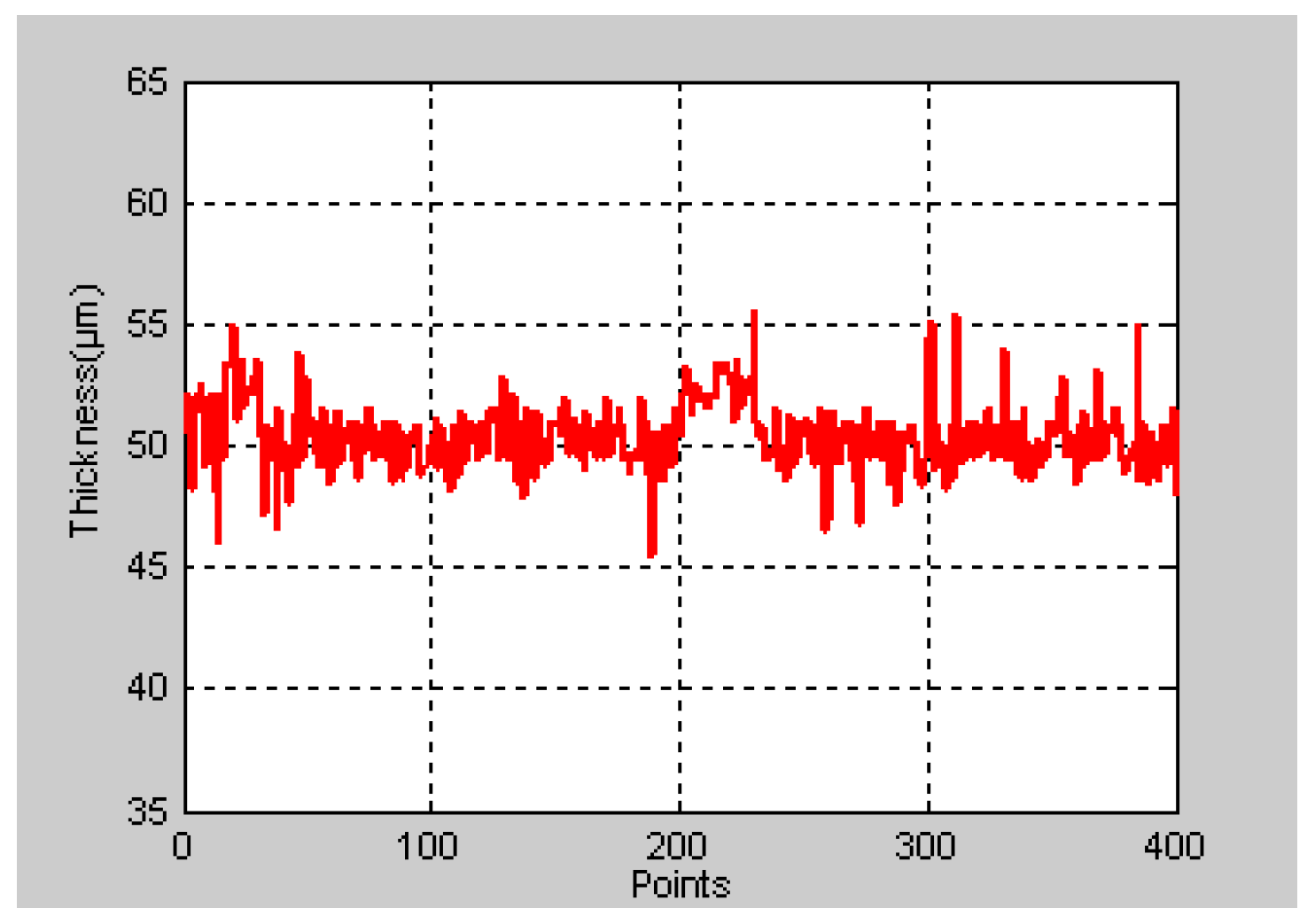
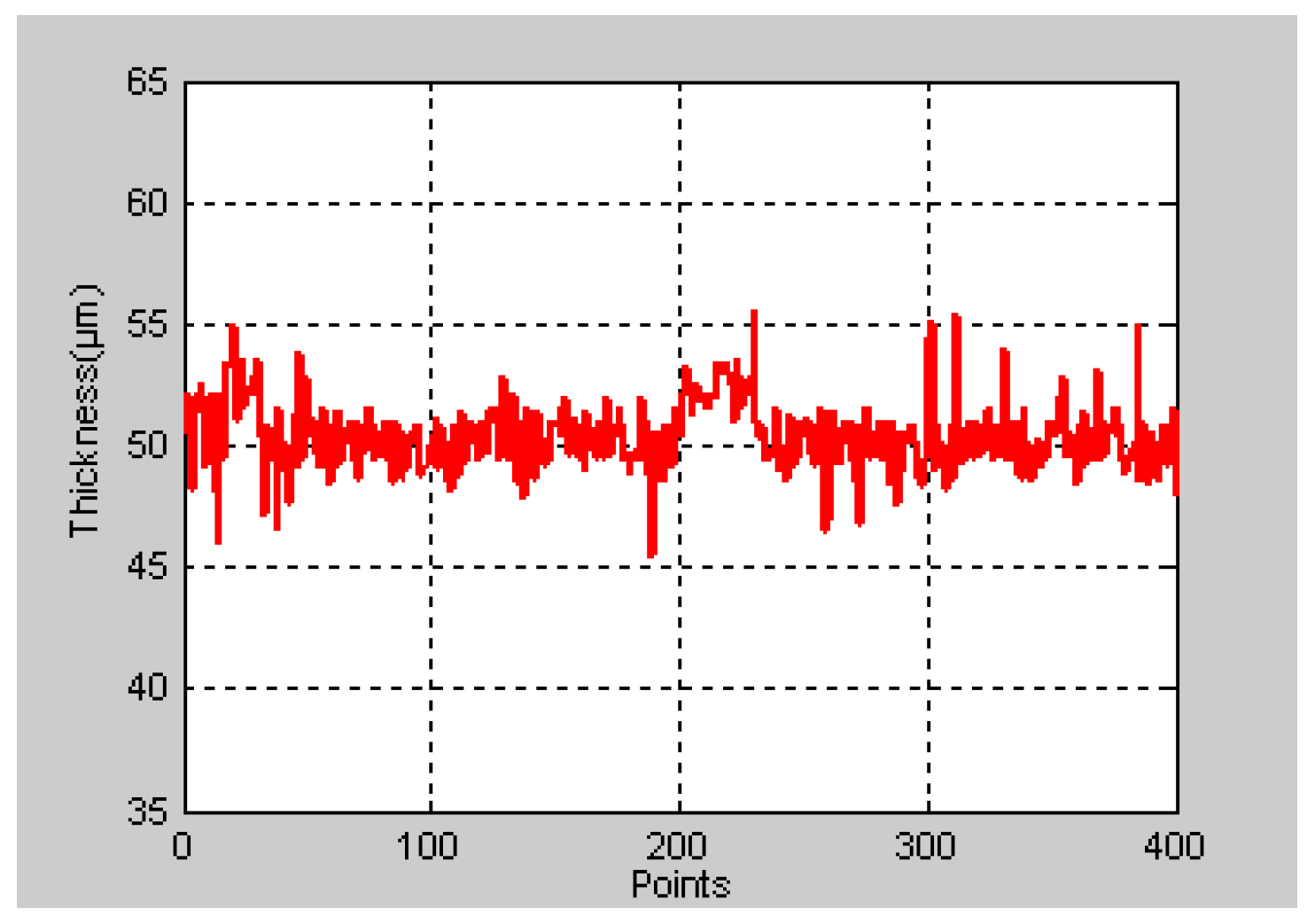
Figure 13. The paint thicknesses of 400 discrete points are measured by the paint thickness gauge after the spray painting operation. The paint thickness at the sample point after spray painting in the optimized trajectory is shown in
Figure 14, among which the maximum paint thickness is
qmax = 55.6 μm, and the minimum paint thickness is
qmin = 45.5 μm. It can be seen that all the paint thicknesses at the sampling point are within the maximum allowable deviation of the paint thickness
qw, which is in line with the requirements of the spray quality.
From the point of view of spray painting efficiency, the compared results of GA, ACO, PSO, and random combination are shown in
Table 1. It can be seen from the results that the total length of the spray trajectory using the PSO algorithm is the shortest, the spray painting time is the least, and the execution time of the system operation is the longest, which is within the allowable range in the practical application. For the workpiece, the spray painting time was reduced by 23% compared to a random combination. The total trajectories of GA and ACO are shorter than those of the random combination, and the spray painting time are reduced by 16% and 20%, respectively. It should be noted that the workpiece used here is only divided into five patches. For the workpiece, which is more complex and has more patches, the advantages of using the PSO algorithm in saving painting time will be more obvious, but the execution time of the offline programming system will be longer. Therefore, if the real-time performance of the system operations can meet the practical application requirements, the PSO algorithm will be the best choice. Otherwise, the GA algorithm or ACO algorithm can be taken into consideration.
5.6. Spray Painting Experiment
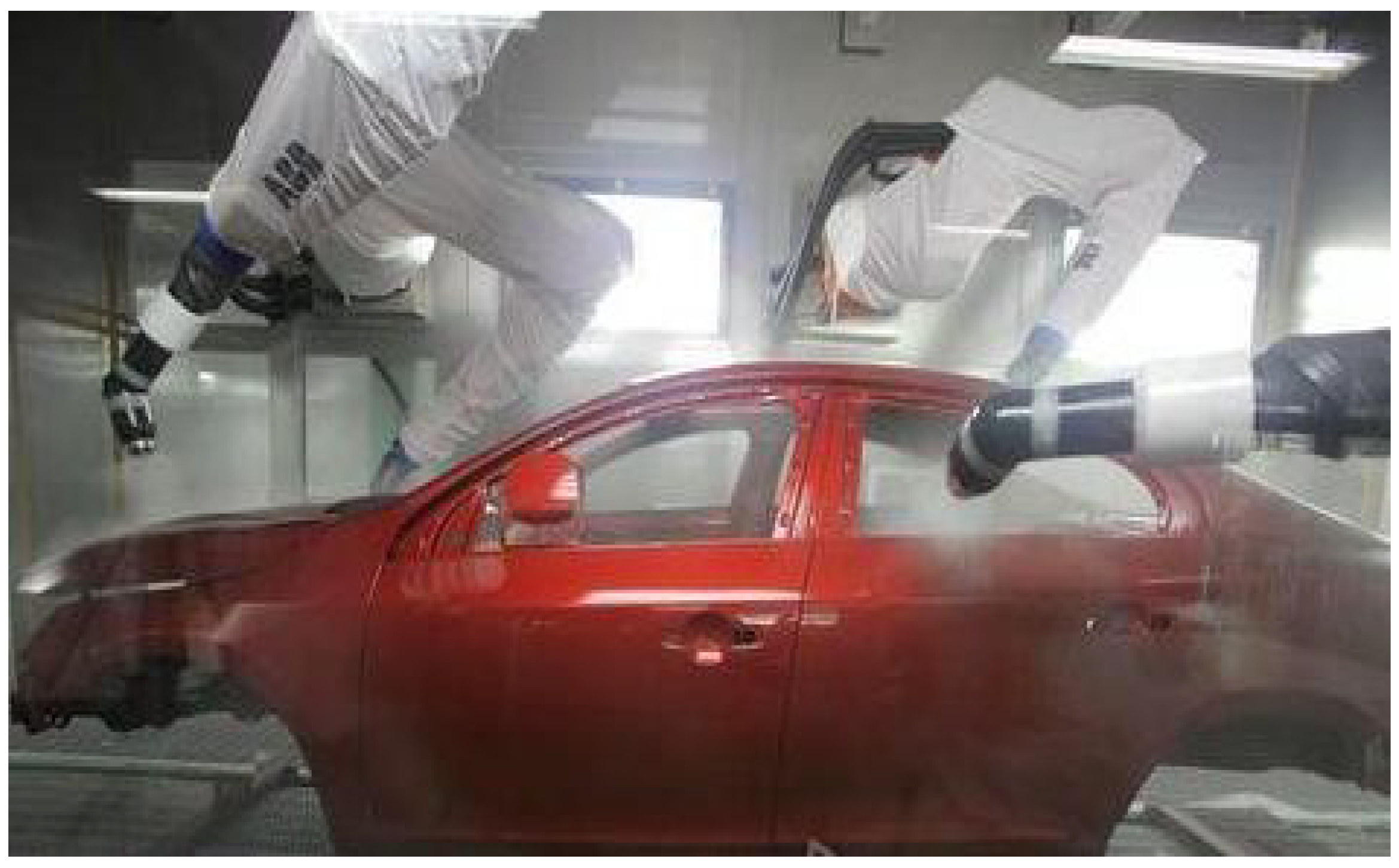
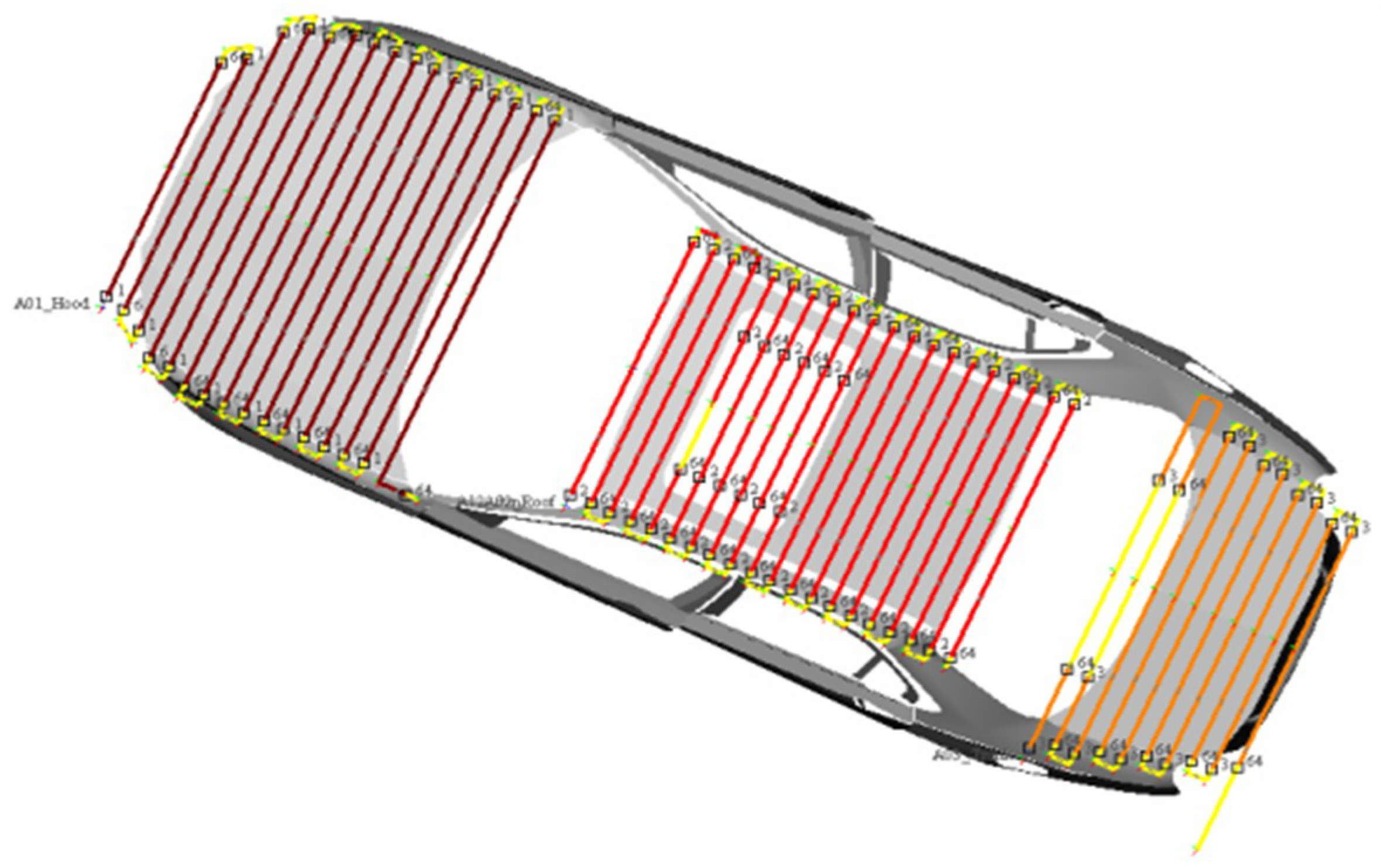
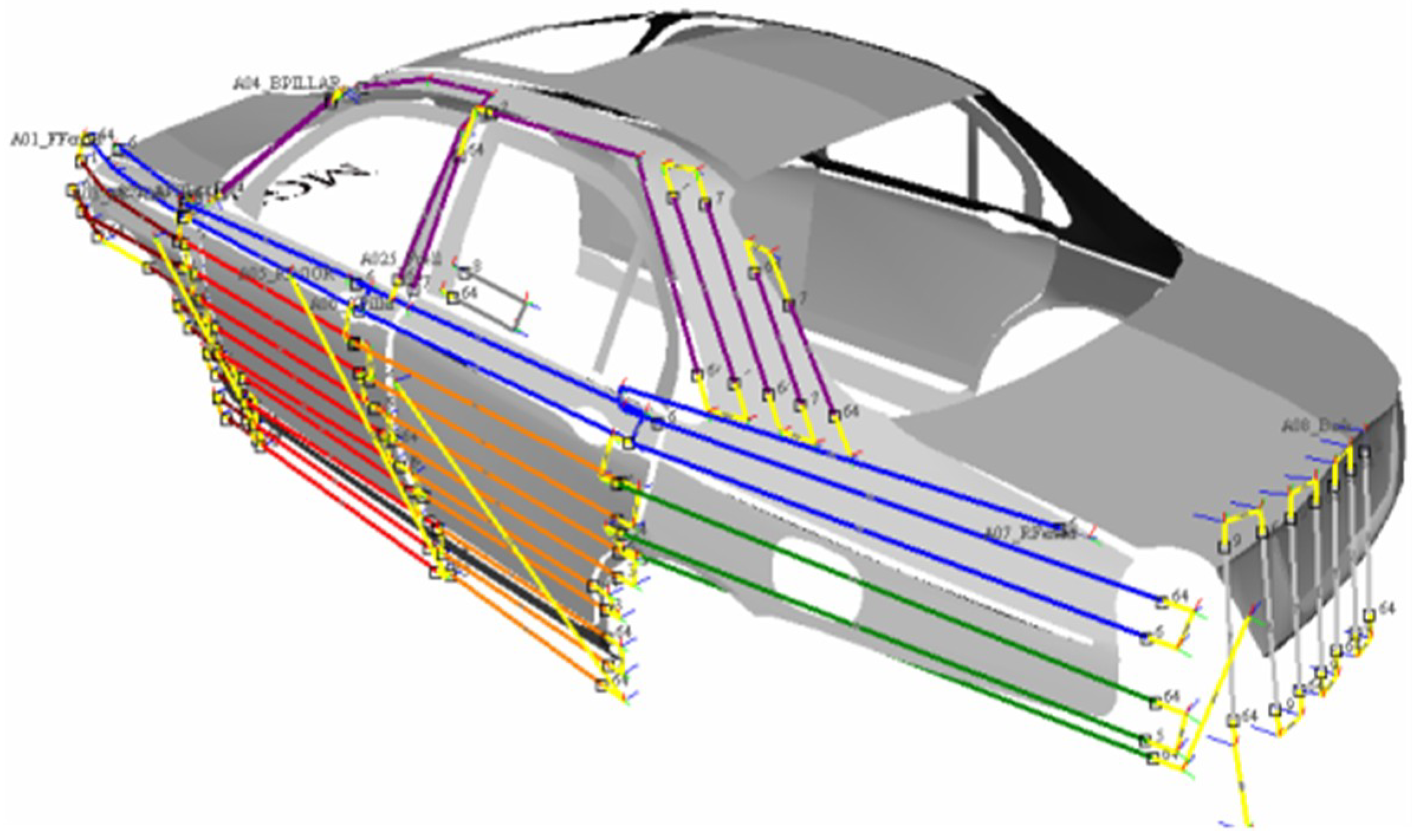
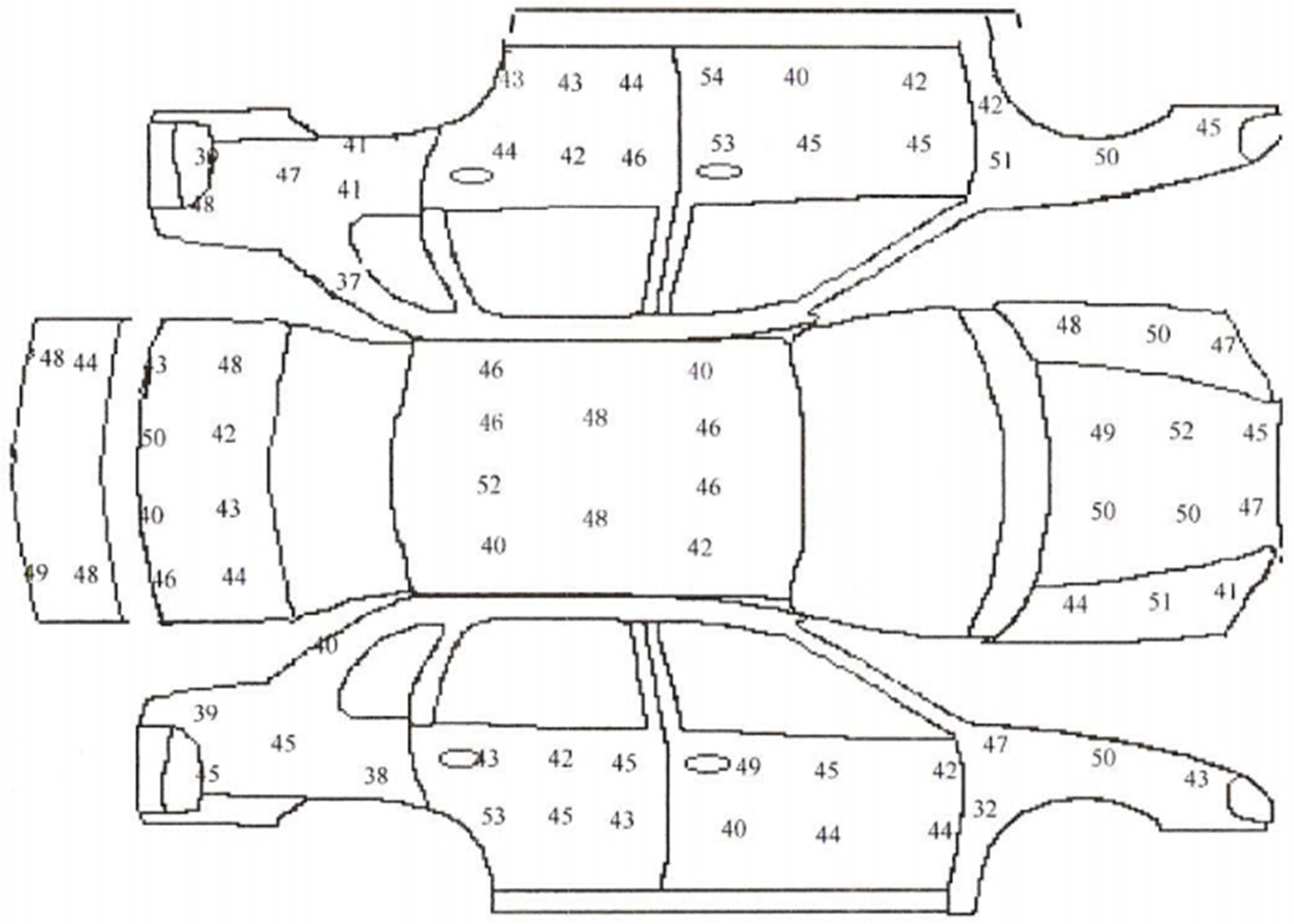
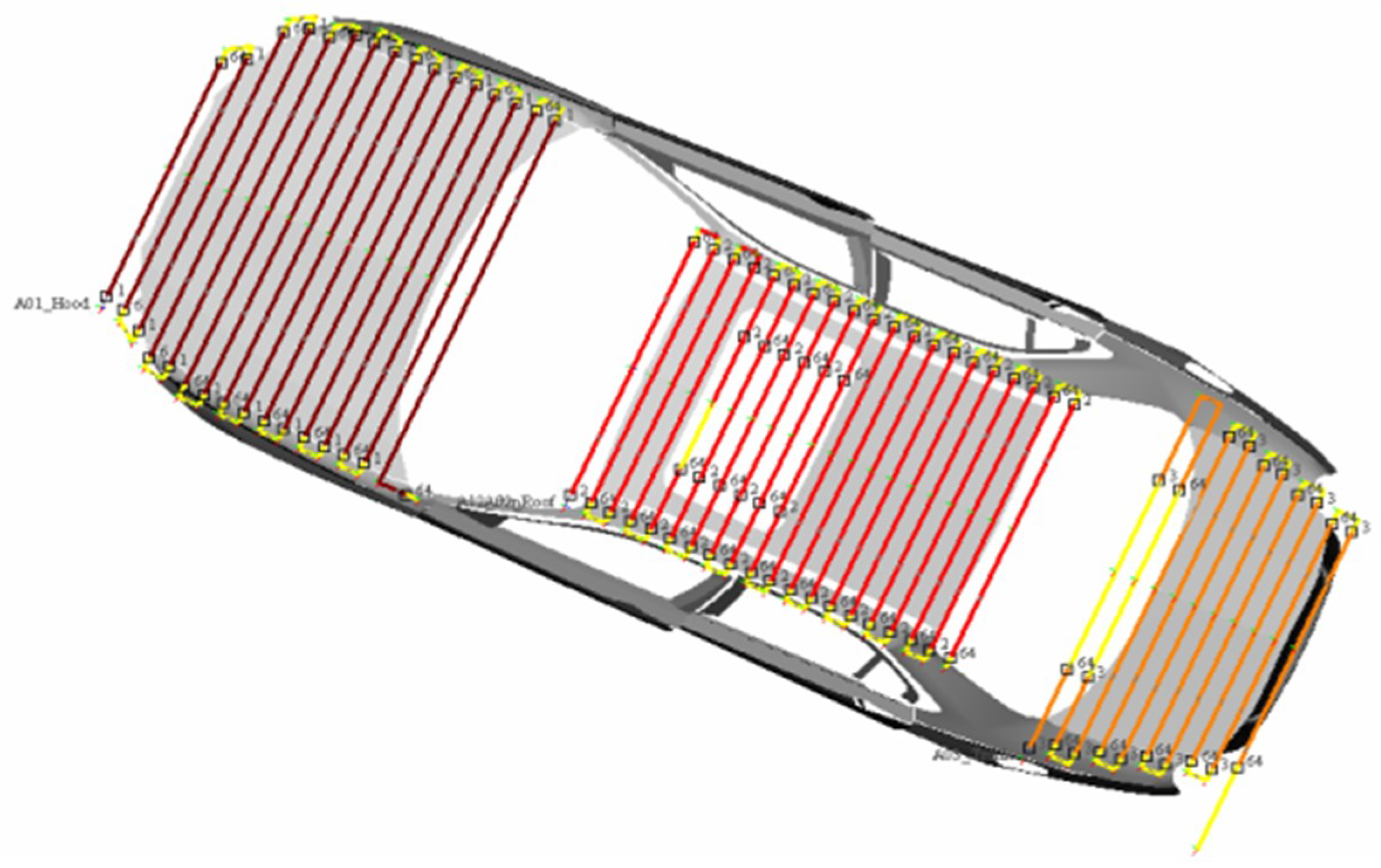
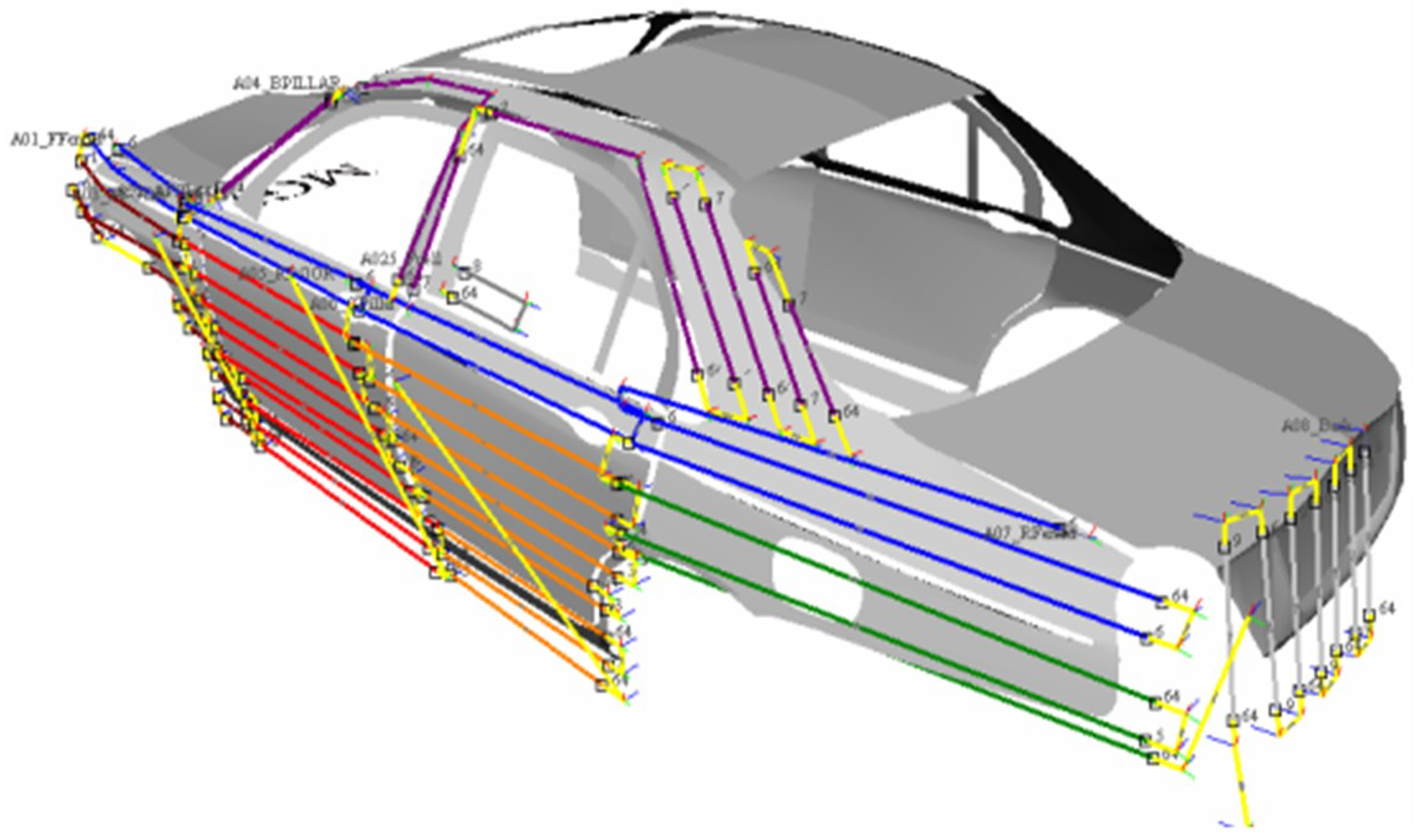
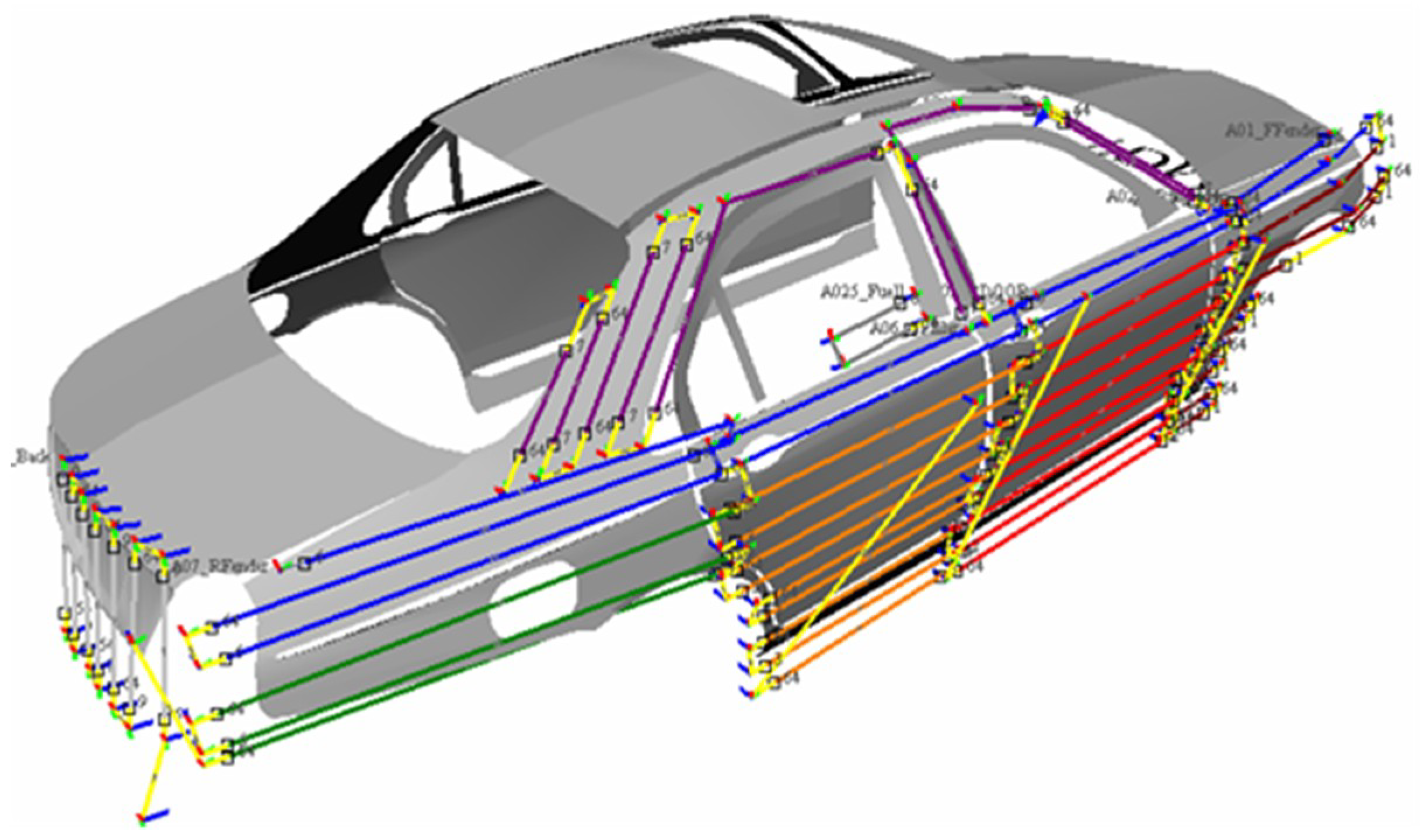
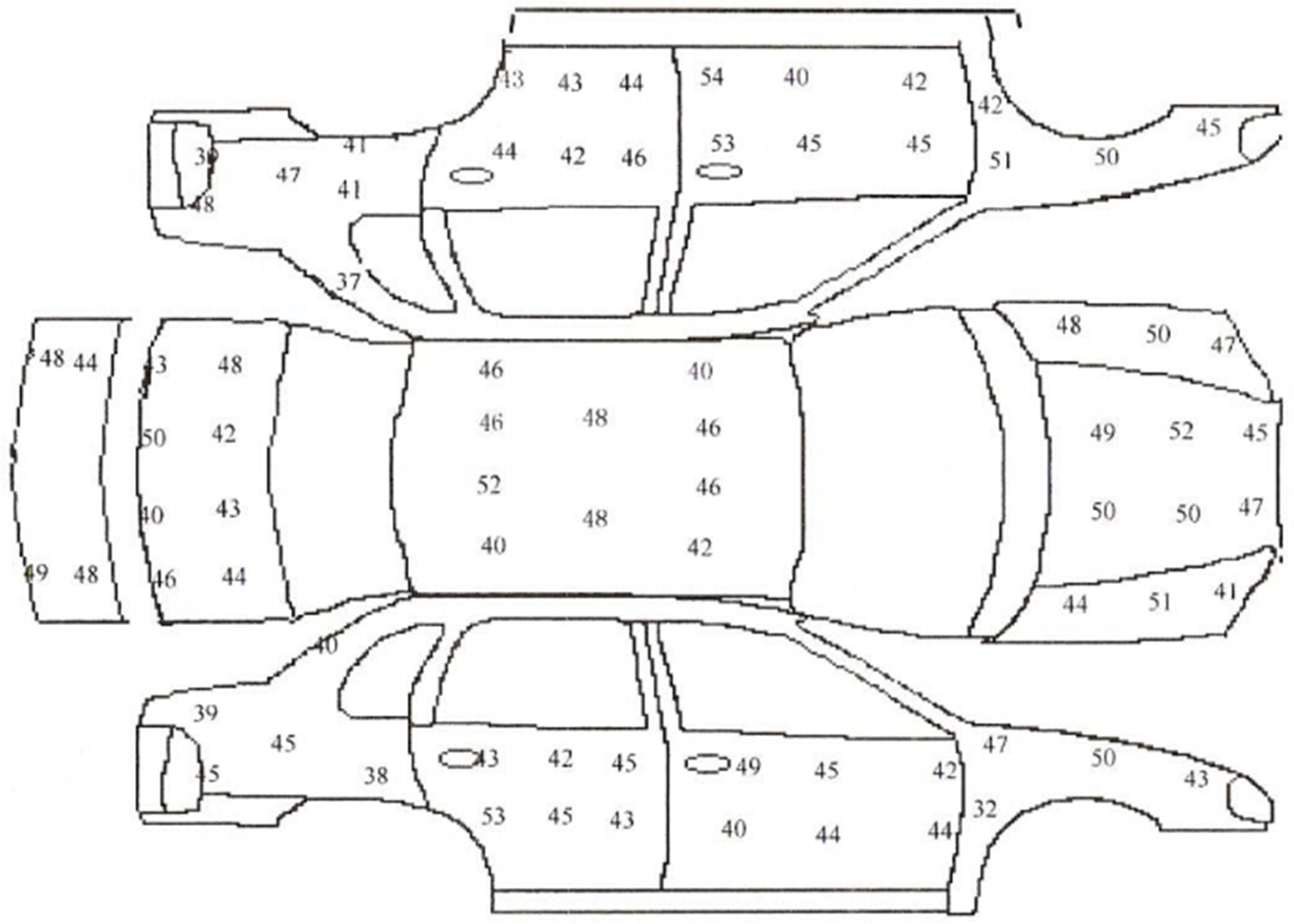
As shown in
Figure 15,
Figure 16,
Figure 17 and
Figure 18, taking the automotive body of a brand is as the paint objective. The thickness of the coating on each sampling point is shown in
Figure 19. Each spray parameter settings in the optimal algorithm of the spray painting trajectory are as follows: The ideal paint thickness is
qd = 50 μm, the maximum allowable deviation of the thickness is
qw =
10 μm, the spray radius is
R = 60 mm, the spray distance is
H = 80 mm, and the velocity of the spray is
v = 389 mm/s. The left side of the car surface is divided into 15 patches and the trajectory of each patch is in a different color. GA, ACO, and PSO are used to carry out experiments when solving the TTOI. The parameters of the GA algorithm are set as: Population size is
Psize = 100, crossover probability is
xrate = 0.20, mutation probability is
mrate = 0.05, and the maximum number of evolutionary generation is
T = 200. The parameters of the ACO algorithm are set as: The number of ants is
m = 10, parameter
α = 1, parameter
β = 5, the volatilization rate of pheromone is
ρ = 0.5, constant
Q = 100, and the maximum number of iterations is
Nmax = 200. The parameters of the PSO algorithm are set as: The maximum speed threshold is
ε = 1000, the number of particles is 20, learning factors
c1 =
c2 = 2, and the maximum number of iterations is
Nmax = 200.
From the point of view of spray painting efficiency, the compared results of the GA, ACO, PSO, and random combination are shown in
Table 2. It can be seen from the results that the total length of the spray trajectory using the PSO algorithm is the shortest, the spray painting time is the least, and the execution time of the system operation is the longest, which is within the allowable range in the practical application.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}