A Distributed Strategy for Target Tracking and Rendezvous Using UAVs Relying on Visual Information Only

 , ,
, ,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Background Material and Problem Formulation
2.1. Problem Formulation
2.2. Solution Strategy
3. Distributed Visual Servoing: Static Target
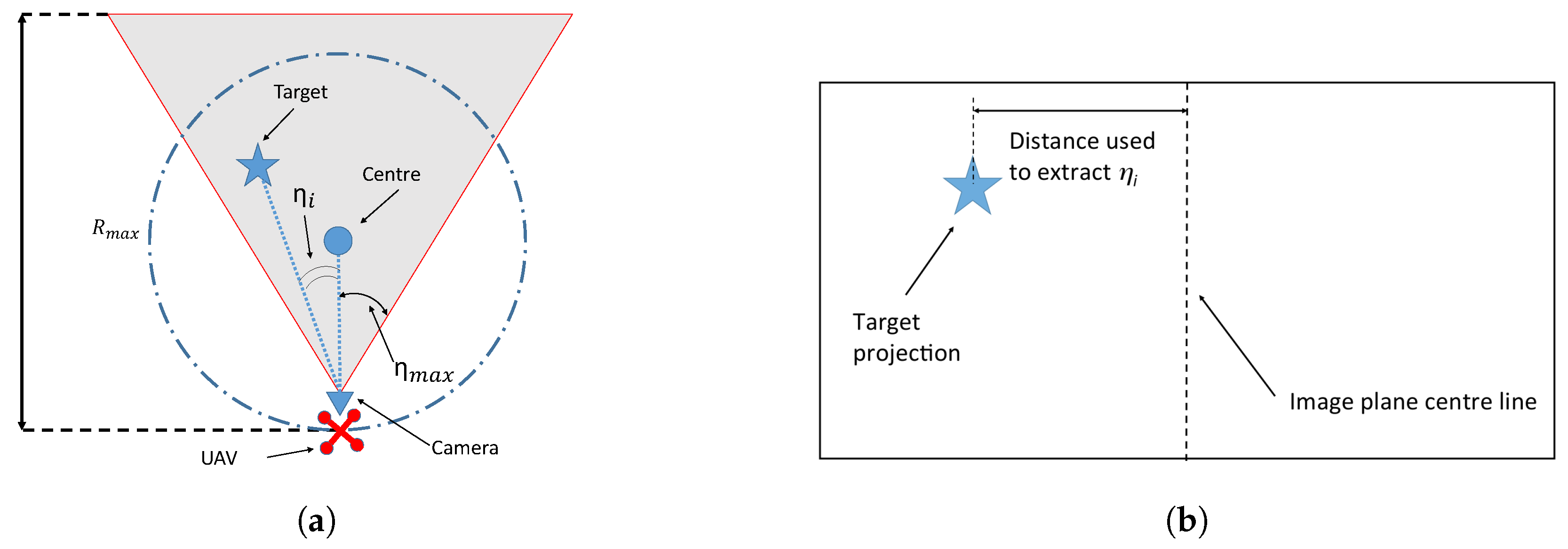
3.1. Generation of Local Measurements
3.2. Distributed Estimation
3.3. Position Update
3.4. Convergence Results
4. Distributed Visual Servoing: Dynamic Target
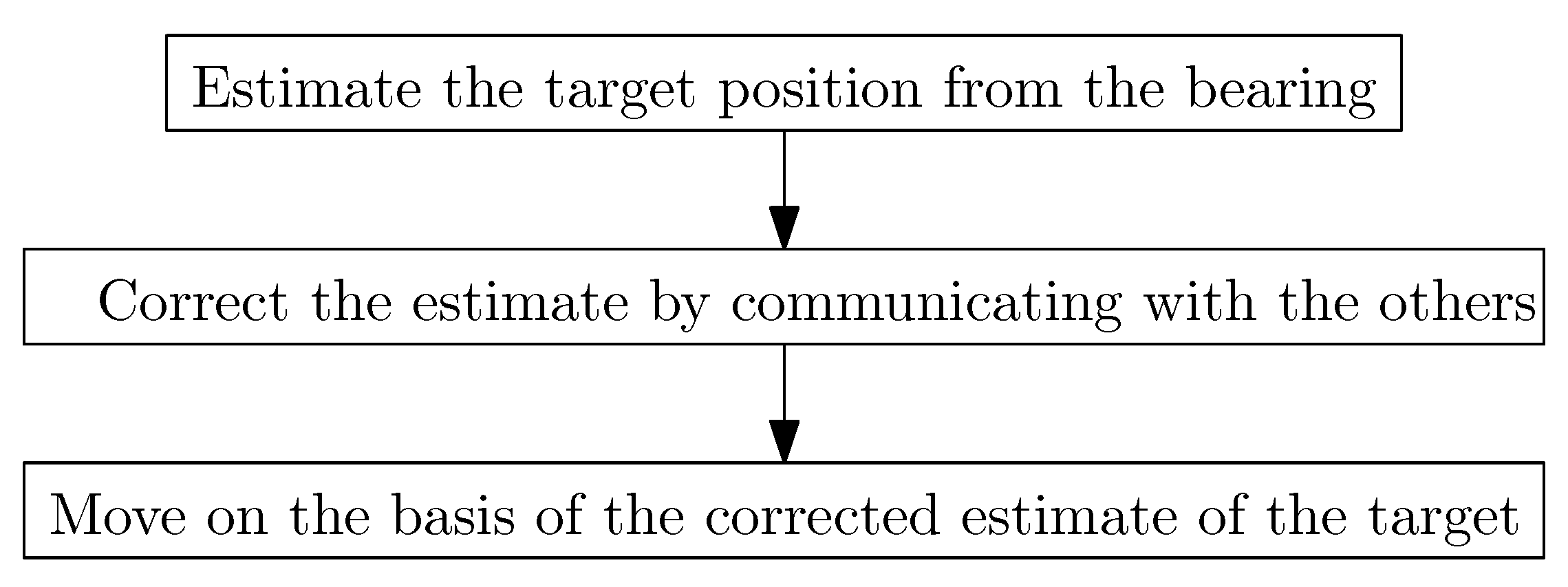
Target Tracking
- 1.
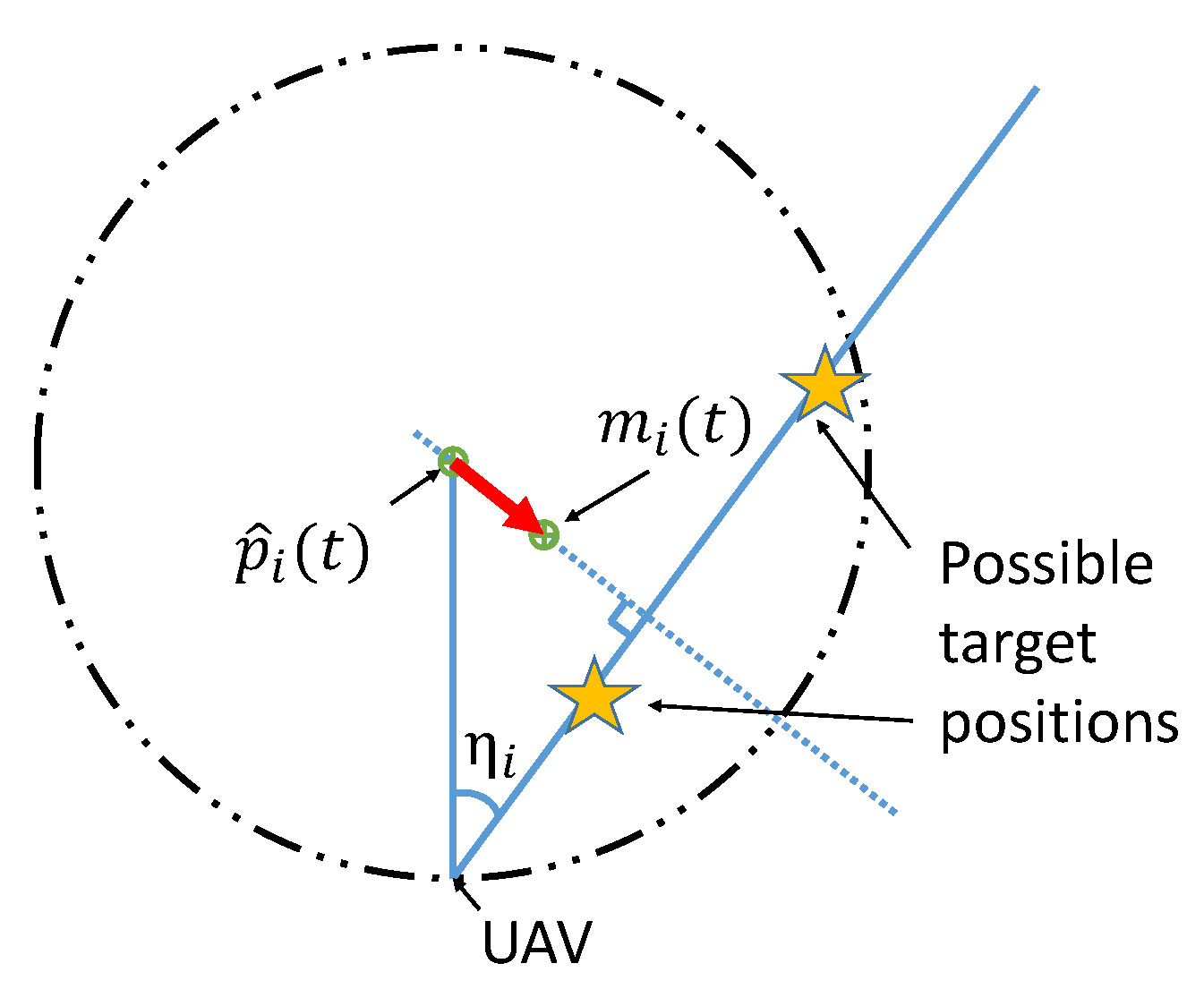
- Compute the measurement from using (2);
- 2.
- Execute one step of the WLS algorithm with as an input and produce ;
- 3.
- Run the DKF algorithm using as inputs returned by the WLS. The output is the estimate of the target state (position and velocity);
- 4.
- 5.
- The updated centre position and velocity are then given by .
5. Distributed Positioning
Rendezvous
- UAV j does not see the target but it communicates with UAV i;
- UAV j sees the target, but does not communicate with UAV i;
- UAV j sees the target and communicates with UAV i.
6. Simulation Results
6.1. Tracking Performance
6.1.1. Set-Up
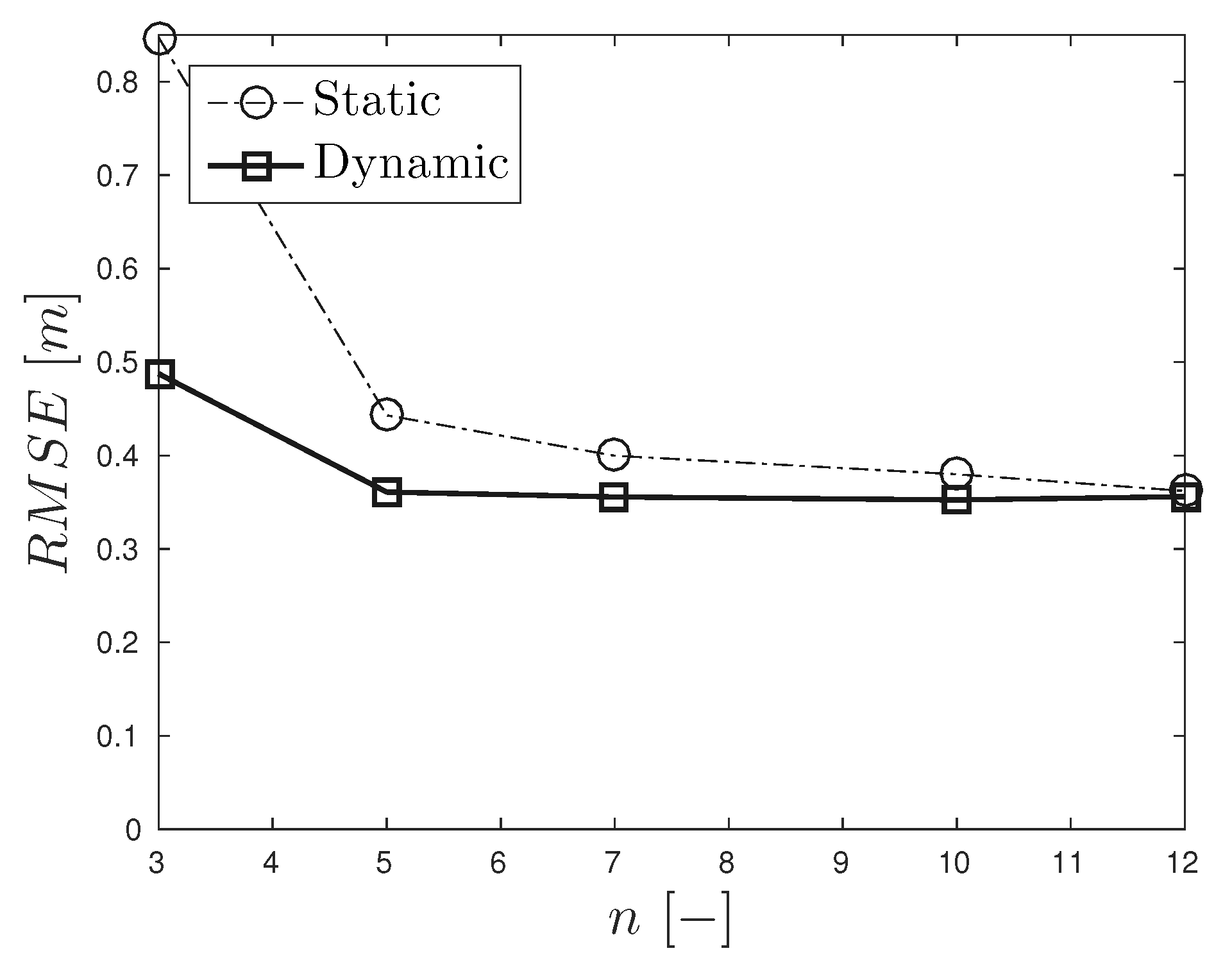
6.1.2. Analysis
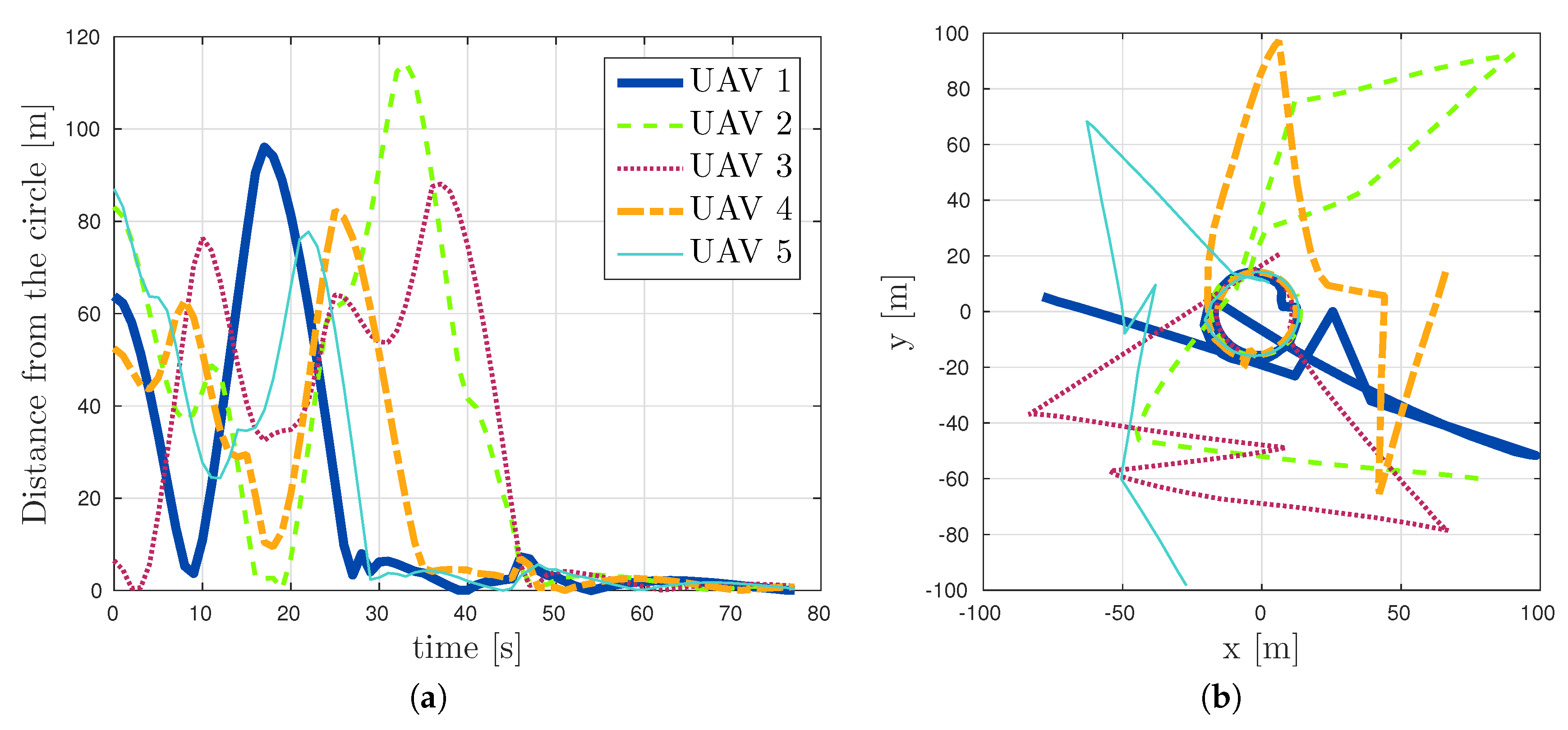
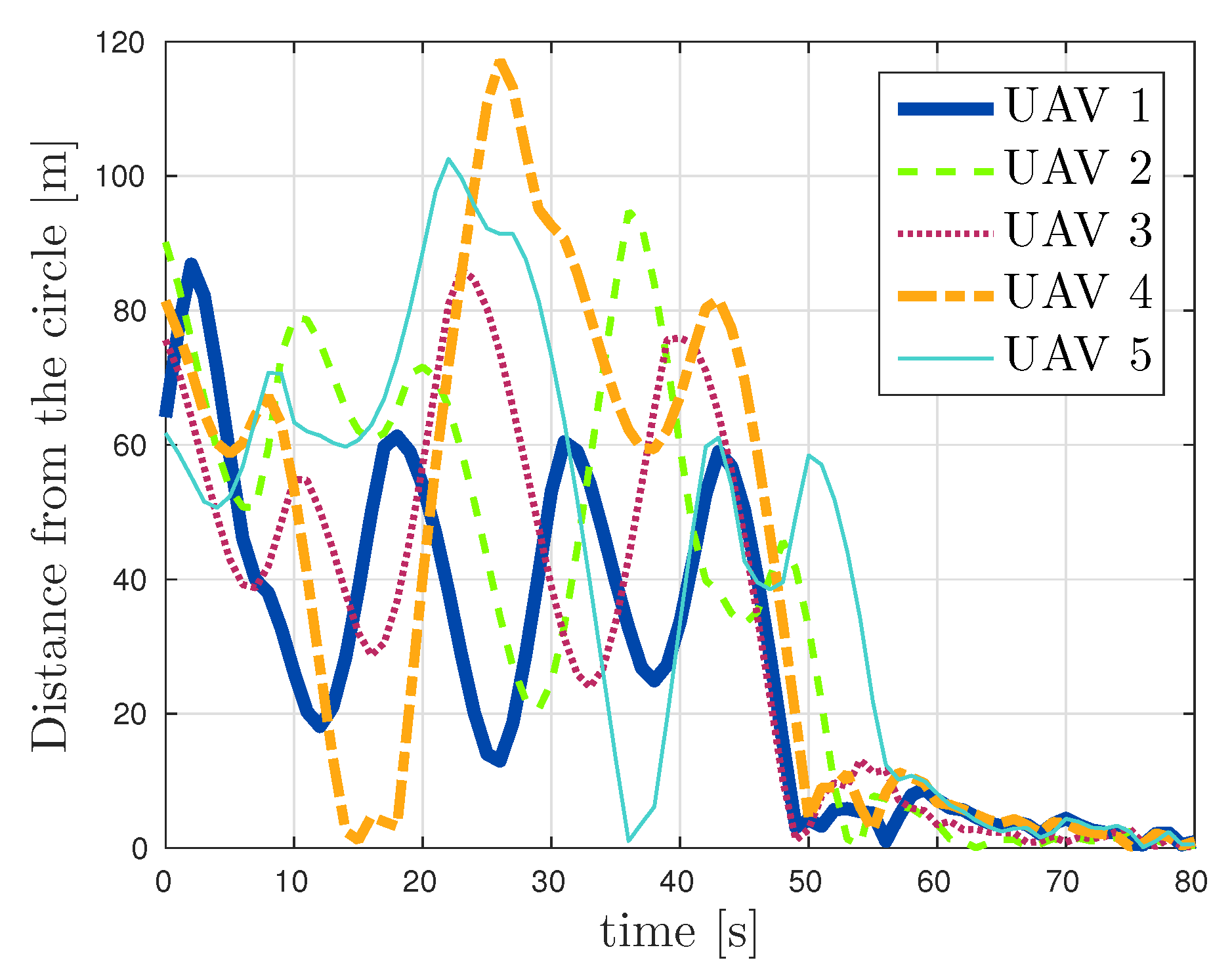
6.2. Rendezvous
6.2.1. Set-Up
6.2.2. Analysis
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fravolini, M.; Pastorelli, M.; Pagnottelli, S.; Valigi, P.; Gururajan, S.; Chao, H.; Napolitano, M. Model-based approaches for the airspeed estimation and fault monitoring of an Unmanned Aerial Vehicle. In Proceedings of the 2012 IEEE Workshop on Environmental Energy and Structural Monitoring Systems (EESMS), Perugia, Italy, 28 September 2012. [Google Scholar]
- Yoon, H.; Shin, J.; Spencer, B.F., Jr. Structural Displacement Measurement using an Unmanned Aerial System. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 183–192. [Google Scholar] [CrossRef]
- Gomez-Balderas, J.; Flores, G.; García Carrillo, L.; Lozano, R. Tracking a Ground Moving Target with a Quadrotor Using Switching Control. J. Intell. Robot. Syst. 2013, 70, 65–78. [Google Scholar] [CrossRef]
- Owen, M.; Yu, H.; McLain, T.; Beard, R. Moving ground target tracking in urban terrain using air/ground vehicles. Proceedings of 2010 IEEE Globecom Workshops, Miami, FL, USA, 6–10 December 2010. [Google Scholar] [CrossRef]
- Iskandarani, M.; Hafez, A.; Givigi, S.; Beaulieu, A.; Rabbath, C. Using multiple Quadrotor aircraft and Linear Model Predictive Control for the encirclement of a target. In Proceedings of the 2013 IEEE International Systems Conference (SysCon), Orlando, FL, USA, 15–18 April 2013. [Google Scholar] [CrossRef]
- Doitsidis, L.; Weiss, S.; Renzaglia, A.; Achtelik, M.W.; Kosmatopoulos, E.; Siegwart, R.; Scaramuzza, D. Optimal Surveillance Coverage for Teams of Micro Aerial Vehicles in GPS-denied Environments Using Onboard Vision. Auton. Robot. 2012, 33, 173–188. [Google Scholar] [CrossRef]
- Qadir, A.; Neubert, J.; Semke, W.; Schultz, R. On-board visual tracking with unmanned aircraft system (uas). Proceedingds of the Infotech@Aerospace 2011, St. Louis, MS, USA, 29–31 March 2011. [Google Scholar]
- Fasano, G.; Accardo, D.; Tirri, A.E.; Moccia, A.; De Lellis, E. Morphological filtering and target tracking for vision-based UAS sense and avoid. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014. [Google Scholar]
- Carli, R.; Chiuso, A.; Schenato, L.; Zampieri, S. Distributed Kalman filtering based on consensus strategies. IEEE J. Sel. Areas Commun. 2008, 26, 622–633. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Kalman-Consensus Filter: Optimality, stability, and performance. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009. [Google Scholar] [CrossRef]
- Li, S.; Kong, R.; Guo, Y. Cooperative distributed source seeking by multiple robots: Algorithms and experiments. IEEE/ASME Trans. Mechatron. 2014, 19, 1810–1820. [Google Scholar] [CrossRef]
- Morbidi, F.; Mariottini, G.L. Active target tracking and cooperative localization for teams of aerial vehicles. IEEE Trans. Control Syst. Technol. 2013, 21, 1694–1707. [Google Scholar] [CrossRef]
- Gurcuoglu, U.; Puerto-Souza, G.; Morbidi, F.; Mariottini, G.L. Hierarchical control of a team of quadrotors for cooperative active target tracking. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Olfati-Saber, R.; Jalalkamali, P. Collaborative target tracking using distributed Kalman filtering on mobile sensor networks. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011. [Google Scholar]
- Julian, B.J.; Angermann, M.; Schwager, M.; Rus, D. Distributed robotic sensor networks: An information-theoretic approach. Int. J. Robot. Res. 2012, 31, 1134–1154. [Google Scholar] [CrossRef]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor aerial vehicles: Modeling, estimation, and control of quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Zhao, S.; Chen, B.M.; Lee, T.H. Optimal sensor placement for target localisation and tracking in 2D and 3D. Int. J. Control 2013, 86, 1687–1704. [Google Scholar] [CrossRef]
- Andreetto, M.; Pacher, M.; Fontanelli, D.; Macii, D. A Cooperative Monitoring Technique Using Visually Servoed Drones. In Proceedings of the 2015 IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems (EESMS), Energy, Trento, Italy, 9–10 July 2015. [Google Scholar] [CrossRef]
- Xiao, L.; Boyd, S.; Lall, S. A scheme for robust distributed sensor fusion based on average consensus. In Proceedings of the IPSN 2005 Fourth International Symposium on Information Processing in Sensor Networks, Boise, ID, USA, 15–15 April 2005. [Google Scholar] [CrossRef]
- Wang, X.; Fu, M.; Zhang, H. Target Tracking in Wireless Sensor Networks Based on the Combination of KF and MLE Using Distance Measurements. IEEE Trans. Mob. Comput. 2012, 11, 567–576. [Google Scholar] [CrossRef]
- Parrot SA. Available online: http://www.parrot.com/usa/products/bebop-drone (accessed on 19 September 2018).
- Huang, H.; Hoffmann, G.; Waslander, S.; Tomlin, C. Aerodynamics and control of autonomous quadrotor helicopters in aggressive maneuvering. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009. [Google Scholar] [CrossRef]
- Solà, J.; Monin, A.; Devy, M.; Lemaire, T. Undelayed initialization in bearing only SLAM. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar] [CrossRef]
- Singer, R. Estimating Optimal Tracking Filter Performance for Manned Maneuvering Targets. IEEE Trans. Aerosp. Electron. Syst. 1970, 6, 473–483. [Google Scholar] [CrossRef]
- Ricquebourg, Y.; Bouthemy, P. Real-Time Tracking of Moving Persons by Exploiting Spatio-Temporal Image Slices. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 797–808. [Google Scholar] [CrossRef]
- Ariyur, K.; Fregene, K. Autonomous tracking of a ground vehicle by a UAV. In Proceedings of the 2018 American Control Conference, Seattle, WA, USA, 11–13 June 2008. [Google Scholar]
- Asaula, R.; Fontanelli, D.; Palopoli, L. A Probabilistic Methodology for Predicting Injuries to Human Operators in Automated Production lines. In Proceedings of the 2009 IEEE Conference on Emerging Technologies and Factory Automation, Mallorca, Spain, 22–25 September 2009. [Google Scholar] [CrossRef]
- Asaula, R.; Fontanelli, D.; Palopoli, L. Safety provisions for Human/Robot Interactions using Stochastic Discrete Abstractions. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 Octomber 2010. [Google Scholar] [CrossRef]






© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andreetto, M.; Pacher, M.; Macii, D.; Palopoli, L.; Fontanelli, D. A Distributed Strategy for Target Tracking and Rendezvous Using UAVs Relying on Visual Information Only. Electronics 2018, 7, 211. https://doi.org/10.3390/electronics7100211
Andreetto M, Pacher M, Macii D, Palopoli L, Fontanelli D. A Distributed Strategy for Target Tracking and Rendezvous Using UAVs Relying on Visual Information Only. Electronics. 2018; 7(10):211. https://doi.org/10.3390/electronics7100211
Chicago/Turabian StyleAndreetto, Marco, Matteo Pacher, David Macii, Luigi Palopoli, and Daniele Fontanelli. 2018. "A Distributed Strategy for Target Tracking and Rendezvous Using UAVs Relying on Visual Information Only" Electronics 7, no. 10: 211. https://doi.org/10.3390/electronics7100211
APA StyleAndreetto, M., Pacher, M., Macii, D., Palopoli, L., & Fontanelli, D. (2018). A Distributed Strategy for Target Tracking and Rendezvous Using UAVs Relying on Visual Information Only. Electronics, 7(10), 211. https://doi.org/10.3390/electronics7100211