
Research on the Application of Single-Parent Genetic Algorithm Improved by Sine Chaotic Mapping in Parent–Child Travel Path Optimization


Abstract
1. Introduction
2. Related Work
3. Methods
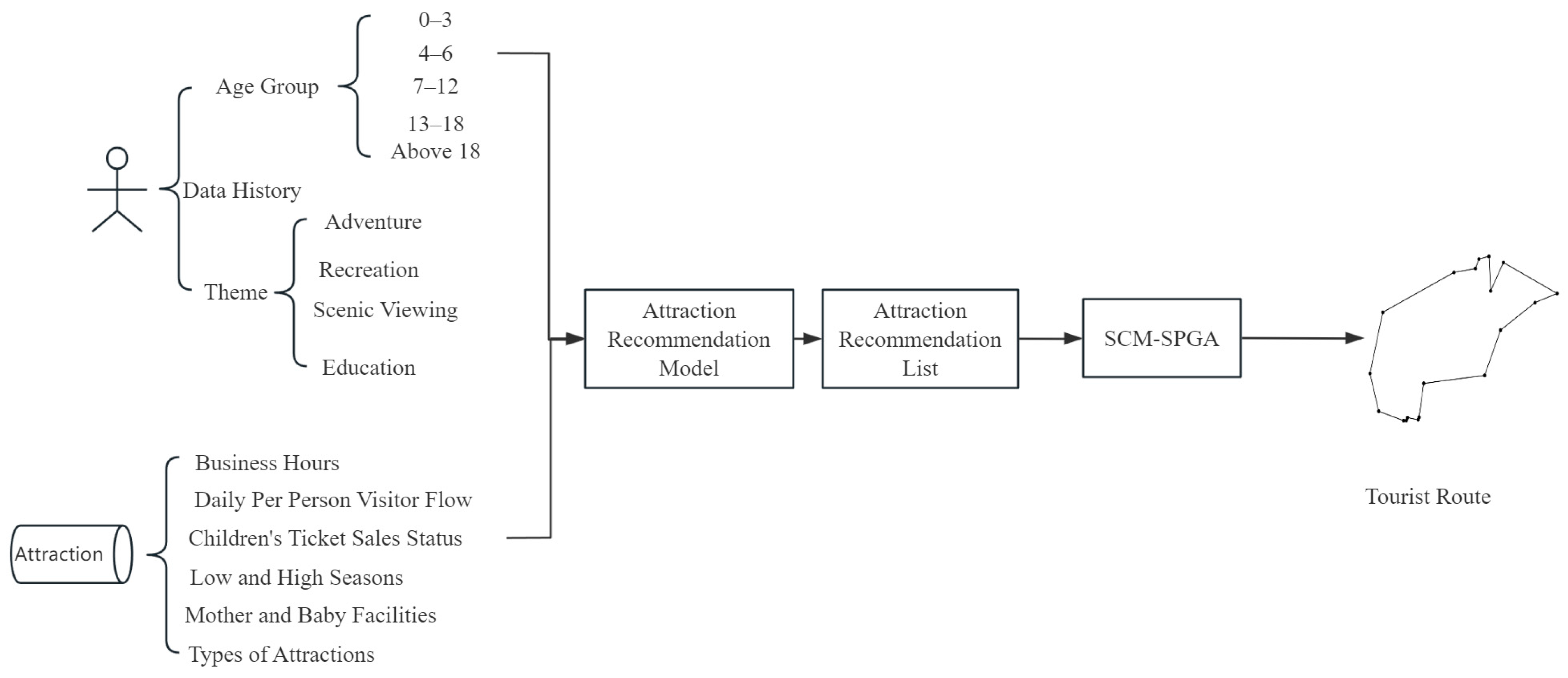
3.1. Overall Framework for Parent–Child Travel Attraction Recommendation and Path Planning
3.2. Process of Parent–Child Travel Attraction Recommendation
3.2.1. Collecting Attraction Information
3.2.2. Constructing User Profiles
3.2.3. Attraction Recommendation Modeling
- Suppose the user selects a specific travel theme. In that case, the system will analyze the attraction’s core features, activity types, and facilities, among other dimensions, to assess how well the attraction aligns with the chosen theme. Based on this analysis, the system will calculate a matching score for each attraction concerning the selected theme.
- Based on the user’s input regarding the child’s age and historical data and using the user profiling method described in Section 3.2.2, the system will generate a user profile. The system will then score each attraction according to this profile, rating each attraction based on how well it matches the user’s preferences and needs.
- The system combines ticket sales information, analyzing each attraction’s daily active user count and children’s ticket sales to assess its appeal to family visitors. The daily active user count reflects the overall popularity of the attraction, while the sale of children’s tickets directly indicates its attractiveness to family tourists. The system calculates an attraction’s appeal score by comprehensively analyzing these factors. Additionally, the daily active user count also considers the issue of overcrowding. To avoid recommending attractions with excessive crowds, the system pays special attention to the suitability of visitor flow and provides a comfort score for the visitor flow at each attraction. Through these scores, the system ensures that the recommended attractions offer a rich travel experience while providing a comfortable environment for visitors.
- The system will precisely match the user’s travel time with the opening hours of each attraction to ensure that the recommended attractions are open during the user’s planned visit. Additionally, the system will consider the impact of peak and off-peak seasons on the opening hours of attractions. For example, some attractions may experience high visitor numbers and increased popularity during the peak season, with more activities and entertainment facilities available. In contrast, during the off-peak season, reduced visitor flow may result in limited activities or facilities, and some attractions may adjust their opening hours based on the season. Therefore, the system will calculate a “time suitability” score for each attraction based on its opening hours and seasonal information, helping users filter out attractions where the opening times or the best viewing times fall outside their travel schedule.
- The total score for each attraction t, where t [0, m], and m is the total number of attractions, is calculated using the following formula:where is the weight of the th is the weight of the , and is the th score of the influencing factor, with , , and is the number of influencing factors considered.
- Based on the user’s preset travel time and combining the scores of each attraction with their average visit duration, the system will recommend a suitable list of attractions for the user. To enhance the user’s autonomy, they can also add attractions they are personally interested in or remove those they do not wish to visit from the recommended list, ultimately generating a personalized travel attraction recommendation list.
3.3. Sine Chaos Mapping Improved Path Planning Algorithm for Parent–Child Travel
3.3.1. Traveling Salesman Problem (TSP) Model
3.3.2. Sine Chaotic Mapping Improved Circle Operator
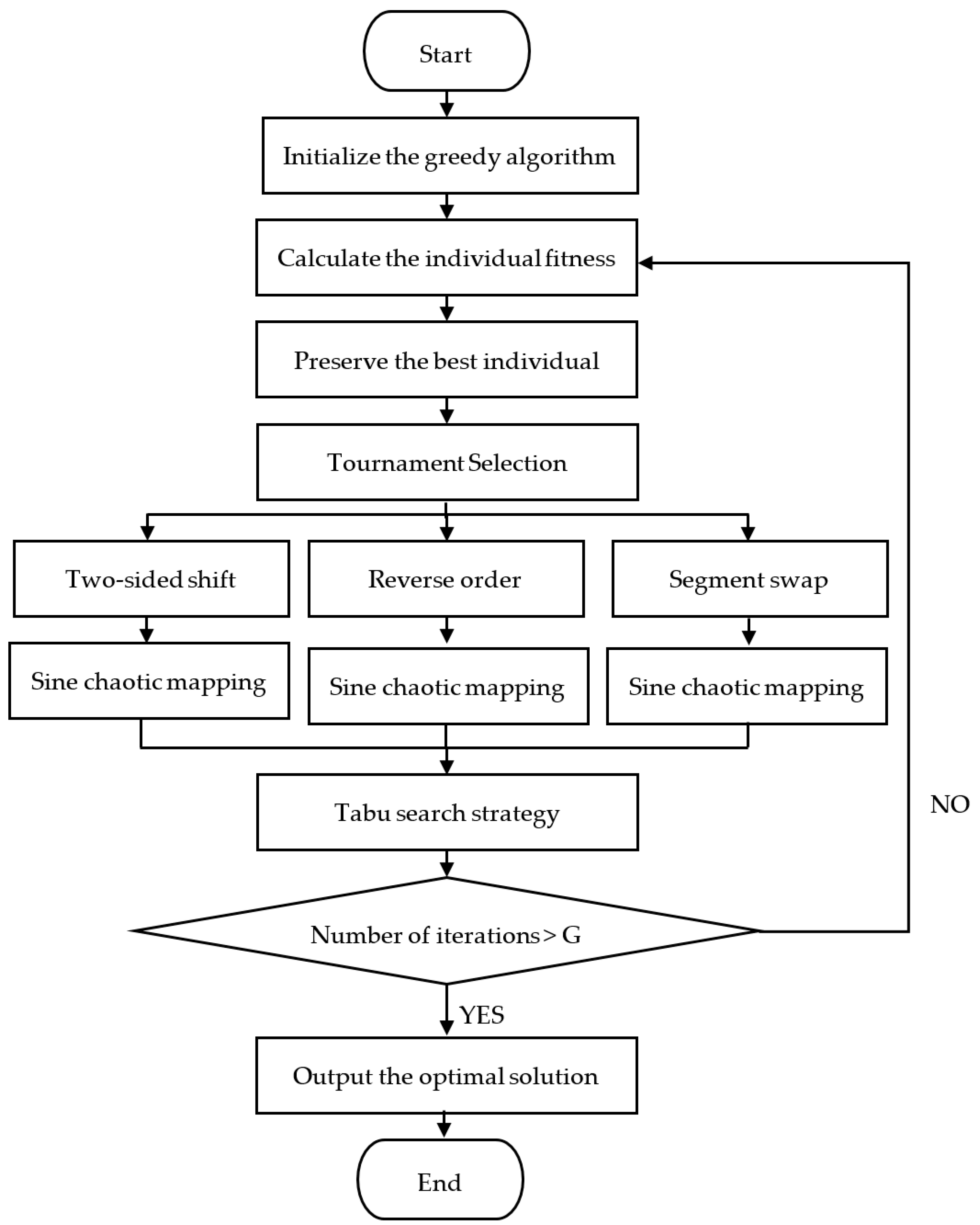
3.3.3. Basic Steps of the Algorithm
- Set the algorithm parameters, including population size NP, number of iterations G, chromosome gene length N, gene encoding method, initialization of the tabu list, and other basic parameters. In the TSP problem in this paper, the gene encoding method is natural number encoding, and the chromosome length is the number of cities in the actual problem.
- Calculate the distance matrix D between the cities in the problem and use the greedy initialization operator to obtain the initial population .
- Enter the iteration loop, checking if the current iteration count exceeds the preset total number of iterations. If it does, exit the loop; if not, continue the loop. Calculate the path length L(V) for each individual in the population according to the formula in Section 3.3.1, where V represents the current individual. The normalized population fitness is then calculated using the following formula:where and represent the fitness and path length of the ith individual, respectively, and maxlen and minlen represent the longest and shortest paths among all individuals in the current population, where , represents a tiny non-negative constant, typically taken as .
- 4.
- According to the fitness values, record the individual with the highest fitness in this iteration, update the optimal solution sequence and path length, and then use the tournament selection [30] strategy to choose high-fitness individuals to form a new population .
- 5.
- Place the population into the mutation genetic loop, apply the shift-reversal-swap combination operator to each individual, and apply the sine chaotic mapping operator after each operation.
- 6.
- After completing one round of the mutation strategy, select the top NP individuals to form a new offspring population . Apply the tabu search strategy to population to obtain the new .
- 7.
- Check whether the current iteration count is less than the maximum iteration count, G. If it is, execute Step 3; otherwise, exit the genetic mutation loop, output the individual with the shortest path in the current population, and plot the curves of the shortest path and fitness changes concerning the number of iterations.
3.3.4. Basic Flow of the Algorithm
4. Results and Discussion
4.1. Datasets
4.2. Experiments and Results Analysis
4.2.1. Performance Analysis of the Sine Chaos Mapping Operator
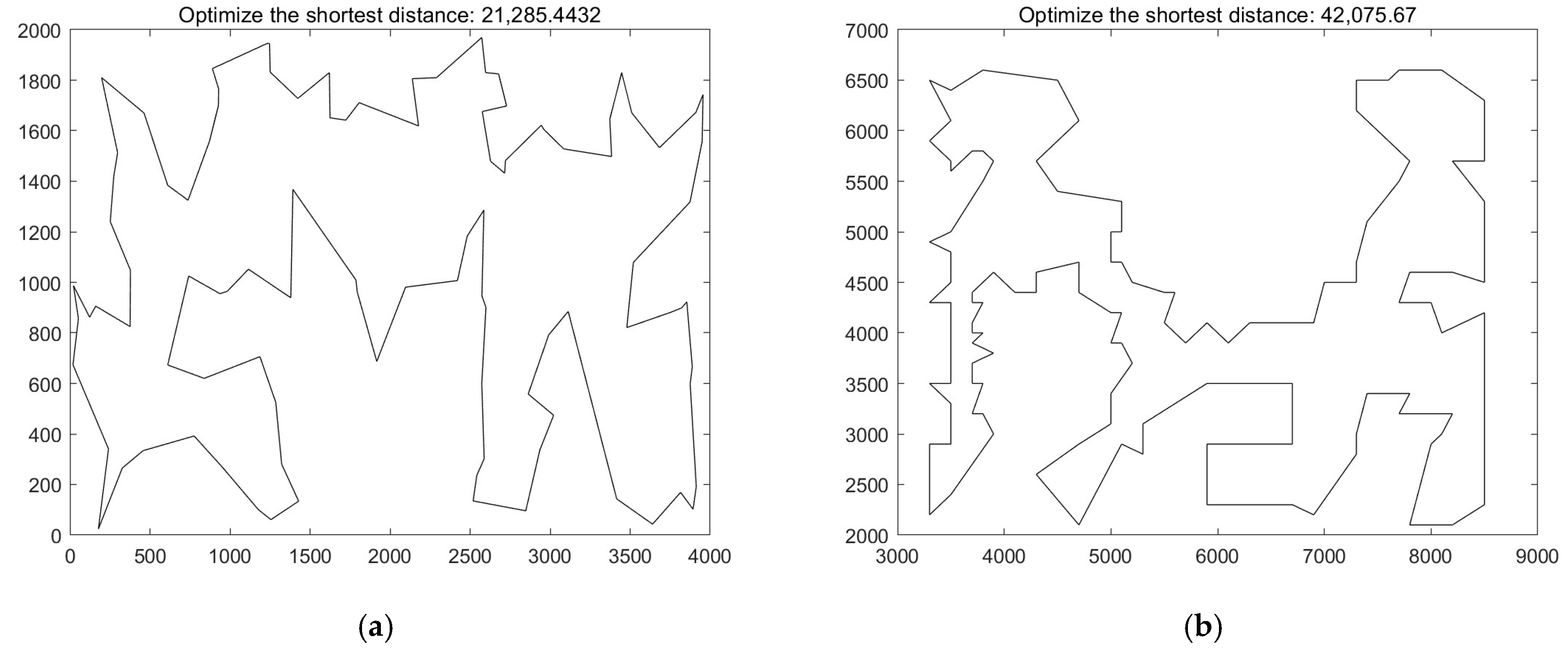
4.2.2. Analysis of SCM-SPGA’s Solving Ability
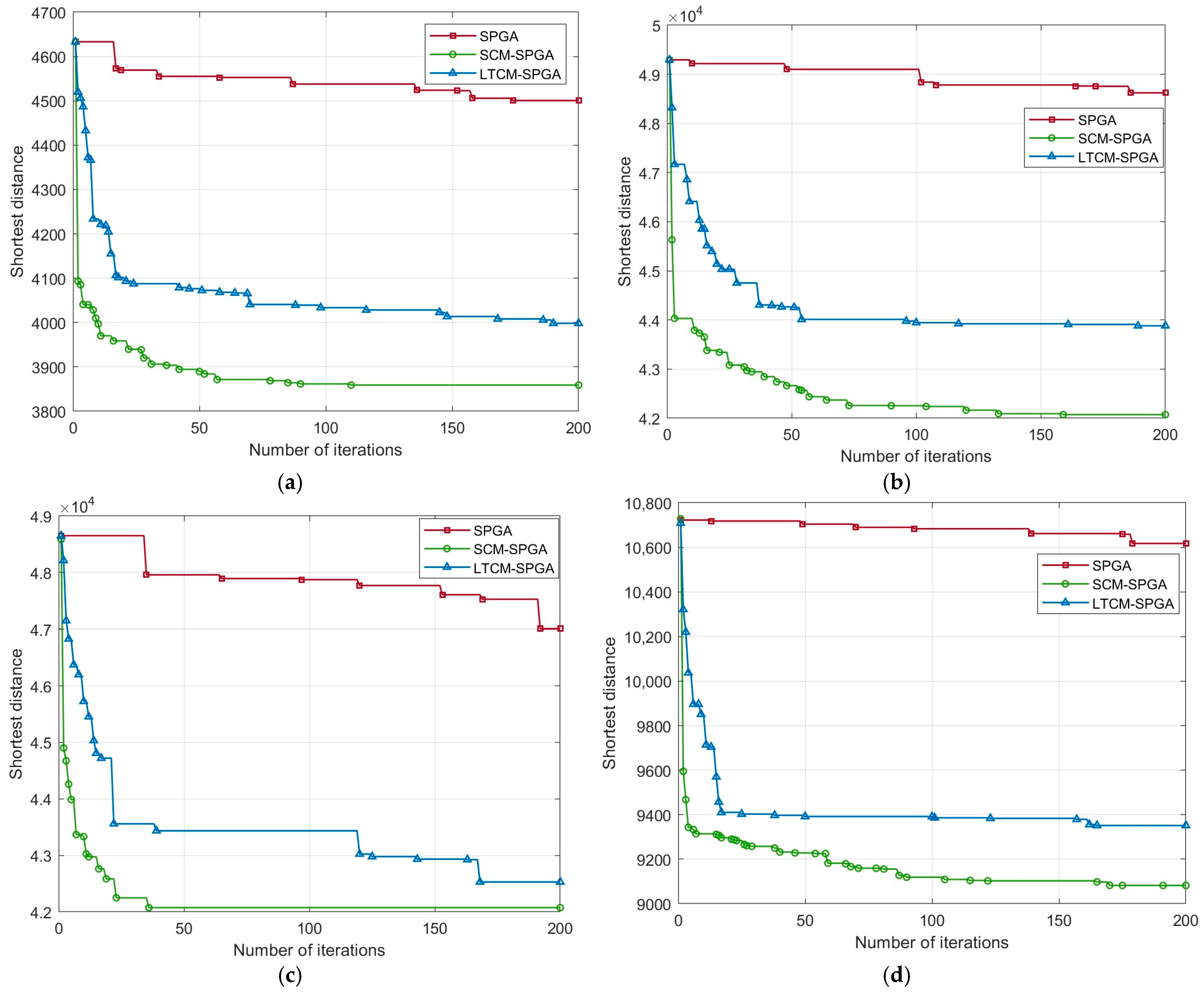
4.2.3. Comparison of SCM-SPGA with Other Algorithms
4.3. Application Case Analysis
5. Managerial Applications
6. Conclusions
7. Limitations
8. Future Research
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| SCM-SPGA | Single-Parent Genetic Algorithm based on Sine Chaos Mapping |
| TSP | Traveling Salesman Problem |
| EDJS-PGA | Exploration-Development-Jumping Strategy Single-Parent Genetic Algorithm |
| GA + MARL | Genetic Algorithm and Multi-Agent Reinforcement Learning |
| ILSA | Iterative Local Search Algorithm |
| IGA | Improved genetic algorithm |
| NA | Not applicable |
| BER | Best solution error rate |
| MER | Mean solution error rate |
| TSPLIB | Traveling Salesman Problem Library |
| MCDM | Multi-Criteria Decision-Making |
| LTCM-SPGA | Logistic–Tent Chaotic Mapping Single-Parent Genetic Algorithm |
| GA | Genetic Algorithm |
Appendix A
| Attraction Number | Attraction Names |
| S1 | Hainan Province, Wenchang City, Hainan Tonggu Ridge Scenic Area |
| S2 | Qiongzhong Li and Miao Autonomous County, Baisha Uprising Memorial Park |
| S3 | Hainan Province, Haikou City, Qiongshan District, Hainan Provincial Museum |
| S4 | Hainan Province, Qionghai City, Chunhui Coconut Culture Tourism Park |
| S5 | Nanshan Cultural Tourism Zone |
| S6 | Dadonghai Cave Scenic Area |
| S7 | Hainan Yanoda Rainforest Cultural Tourism Zone |
| S8 | Hainan Fenjiezhou Island Tourist Area |
| S9 | Binglang Valley Li and Miao Culture Tourism Zone |
| S10 | Wuzhizhou Island Tourist Area |
| S11 | Hainan Tropical Wildlife and Botanical Garden |
| S12 | China Leiqiong Haikou Volcano Group Global Geopark |
| S13 | Holiday Beach Tourist Area |
| S14 | Haikou Mission Hills Resort and Tourist Area |
| S15 | Tianya Haijiao Scenic Area |
| S16 | Yalong Bay Aiyuan Beach Resort |
| S17 | Sanya Dadonghai Tourist Area |
| S18 | Sanya West Island Marine Culture Tourist Area |
| S19 | Yalong Bay Tropical Paradise Forest Tourism Area |
| S20 | Bo’ao Asia Forum Permanent Venue Scenic Area |
| S21 | Xinglong Tropical Botanical Garden |
| S22 | Dongshanling Cultural Tourism Zone |
| S23 | Nanwan Monkey Island Ecological Tourism Area |
| S24 | Hainan Wenbi Peak Pangu Culture Tourism Area |
| S25 | Qixianling Hot Springs National Forest Park |
| S26 | Wugong Ancestral Hall |
| S27 | Haikou Qiongzhou Cultural Style Street |
| S28 | Haikou Qilou Snack Style Street |
| S29 | Haikou Baishamen Park |
| S30 | Haikou Qilou Architecture Historical and Cultural Street |
| S31 | Luhuitou Park |
| S32 | Nantian Tropical Botanical Garden |
| S33 | Sanya Phoenix Hill Love and Mountain Oath Scenic Area |
| S34 | Yalong Bay Underwater World |
| S35 | Yalong Bay International Rose Valley |
| S36 | Conch Girl Creative Cultural Park |
| S37 | Sanya Orchid World Cultural Tourism Area |
| S38 | Yetian Ancient Village Scenic Area |
| S39 | Coconut Grand View Garden |
| S40 | Red Detachment of Women Memorial Park |
| S41 | Bo’ao Water City Tourist Area |
| S42 | Bo’ao Oriental Cultural Park |
| S43 | Hainan Baishiling Tourist Scenic Area |
| S44 | Xinglong Tropical Medicinal Plant Garden |
| S45 | Wanning Outlets Cultural Tourism Area |
| S46 | Hainan Danzhou Shihua Water Cave Geological Park |
| S47 | Dongpo Academy |
| S48 | Wuzhishan Tropical Rainforest Scenic Area (Shui Man Area) |
| S49 | Wanjia Fruit Tropical Botanical Garden |
| S50 | Fushan Coffee Culture Style Town Center Area |
| S51 | Hainan Yongqing Cultural Tourism Scenic Area |
| S52 | Hai Rui Tomb |
| S53 | Haikou Jinrun Pearl Museum |
| S54 | Wanquan Lake Tourist Area |
| S55 | Qionghai Duohai Cultural Valley Tourist Area |
| S56 | Hainan Tropical Birds World |
| S57 | Haikou Mangrove Rural Tourism Area |
| S58 | Sanya International Duty-Free City |
| S59 | Sanya Little Fish Hot Springs |
| S60 | Sanya Eternal Love Scenic Area |
| S61 | Wenchang Confucian Temple |
| S62 | Wenchang Aerospace Science and Technology Center |
| S63 | Hainan Tonggu Ridge International Ecological Tourism Area |
| S64 | Song Family Ancestral Home |
| S65 | Wanquan River Water Village |
| S66 | Wanquan River Canyon Drift |
| S67 | Riyue Bay South China Sea Fishing Village Cultural Tourism Area |
| S68 | South National Tropical Rainforest Tour Area |
| S69 | Wuzhishan Red Canyon Scenic Area |
| S70 | Wuzhishan Grand Canyon Scenic Area |
| S71 | Wuzhishan Nature Reserve |
| S72 | Baisha Luoshuai Tianya Post Station |
| S73 | Baisha Lao Zhou San Wellness Resort |
| S74 | Hainan Tropical Botanical Garden |
| S75 | Dalong Scenic Tourism Area |
| S76 | Exiangling Forest Tourism Area |
| S77 | March 3rd Cultural Tourism Area |
| S78 | Yalong Small Guilin Tourism Area |
| S79 | Jinshan Temple |
| S80 | Fuli Red Tree Bay Wetland Park |
| S81 | Jianfengling National Forest Park |
| S82 | Maogong Mountain Scenic Area |
| S83 | Muwei Mountain Red Scenic Area |
| S84 | Nanli Lake |
| S85 | Hainan Changying Global 100 Fantasy Theme Park Scenic Area |
| S86 | Qingshui Bay Tourist Area |
| S87 | Guilinyang National Tropical Agricultural Park Scenic Area |
| S88 | Baisha Uprising Memorial Park |
| S89 | Tunchen Dream Fragrant Mountain Aromatic Culture Park |
| S90 | Ding’an County Yamen Museum |
| S91 | Bawangling |
| S92 | Hainan Province Ding’an County Wanjia Fruit Tropical Botanical Garden |
| S93 | Hainan Province Qionghai City Red Detachment of Women Memorial Park |
| S94 | Hainan Province Qionghai City China (Hainan) South China Sea Museum |
| S95 | Hainan Dongfang Beach Park Tourist Area |
| S96 | Hainan Province Wenchang City Chunguang Coconut Kingdom |
| S97 | Hainan Province Ledong Li Autonomous County Maogong Mountain Ecological Tourism Scenic Area |
| S98 | Bamen Bay Mangrove Scenic Area |
Appendix B
References
- Sano, V.D.; Sianipar, P.M. Algorithm to find tourism place shortest route: A systematic literature review. J. Theor. Appl. Inf. Technol. 2021, 99, 787–794. [Google Scholar]
- Yu, K.M.; Lee, M.G.; Chi, S.S. Dynamic path planning based on adaptable Ant colony optimization algorithm. In Proceedings of the 2017 Sixth International Conference on Future Generation Communication Technologies (FGCT), Dublin, Ireland, 21–23 August 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Şehab, M.; Turan, M. An enhanced genetic algorithm solution for itinerary recommendation considering various constraints. PeerJ Comput. Sci. 2024, 10, e2340. [Google Scholar] [CrossRef] [PubMed]
- Lu, B.; Zhou, C. Particle swarm algorithm and its application in tourism route design and optimization. Comput. Intell. Neurosci. 2022, 2022, 6467086. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Hu, P. Deep Reinforcement Learning-Based Multi-Object Adaptive Route Planning for Traveling Recommender Systems. IEEE Access 2023, 11, 120258–120269. [Google Scholar] [CrossRef]
- Wang, P.; Zhu, B.; Yu, Y.; Ali, Z.; Almohsen, B. Complex intuitionistic fuzzy DOMBI prioritized aggregation operators and their application for resilient green supplier selection. Facta Univ. Ser. Mech. Eng. 2023, 21, 339–357. [Google Scholar] [CrossRef]
- Garg, H.; Rani, D. Robust Averaging–Geometric Aggregation Operators for Complex Intuitionistic Fuzzy Sets and Their Applications to MCDM Process. Arab. J. Sci. Eng. 2019, 44, 1–23. [Google Scholar] [CrossRef]
- Zhu, J.; Pan, D. Improved Genetic Algorithm for Solving Robot Path Planning Based on Grid Maps. Mathematics 2024, 12, 4017. [Google Scholar] [CrossRef]
- Mou, N.; Jiang, Q.; Zhang, L.; Niu, J.; Zheng, Y.; Wang, Y.; Yang, T. Personalized tourist route recommendation model with a trajectory understanding via neural networks. Int. J. Digit. Earth 2022, 15, 1738–1759. [Google Scholar] [CrossRef]
- Li, J.; Wang, R.Y. Analysis of spatial-temporal accessibility in Huizhou West Lake scenic spot using big data for smart city. Glob. J. Arts Humanit. Soc. Sci. 2023, 2583, 2034. [Google Scholar]
- Wang, T.Z. Intelligent recommendation model of tourist places based on collaborative filtering and user preferences. Appl. Artif. Intell. 2023, 37, 2203574. [Google Scholar] [CrossRef]
- Ding, M.; Xu, Y. Real-Time Wireless Sensor Network-Assisted Smart Tourism Environment Suitability Assessment for Tourism IoT. J. Sens. 2021, 2021, 8123014. [Google Scholar] [CrossRef]
- Wei, Y.; Park, K.; Liu, H.; Zhao, Y. Influence of Parent-child Travel Push-pull Motivation, Experience on Behavioral Intention. J. Korea Contents Assoc. 2021, 21, 462–473. [Google Scholar] [CrossRef]
- Zhao, Q.; Thongma, W. Current Analysis of Parent-Child Tourism Market for Preschool Children in Nanning City of China. Master’s Thesis, Maejo University, Chiang Mai, Thailand, 2022. [Google Scholar]
- Li, Z.Z.; Yang, Y.; Zhang, X. Family travel as an educational experience: Revealing multi-level Parents’ perceived value through a family systems approach. Tour. Manag. Perspect. 2024, 53, 101301. [Google Scholar] [CrossRef]
- Rojas-de-Gracia, M.-M. Who Influences Family Tourism Decisions? Incorporating Children’s Perceptions. Serv. Bus. 2025, 19, 8. [Google Scholar] [CrossRef]
- Wang, J.; Xu, J.; Okumus, F.; Zhang, J.Z.; Liu, D.Y.; Qi, J. Understanding the Antecedents of Adolescent Family Tourism Motivation: The Role of Adolescents’ Self-Differentiation and Parent-Child Relationships. J. Travel Res. 2024; in press. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, L. Traveling Food Tourism with Children Industry: Motivation, Involvement, Experience Value and Visit Intention. Int. Food Agribus. Manag. Rev. 2024, 1, 1–19. [Google Scholar] [CrossRef]
- Pop, P.C.; Cosma, O.; Sabo, C.; Sitar, C.P. A Comprehensive Survey on the Generalized Traveling Salesman Problem. Eur. J. Oper. Res. 2024, 314, 819–835. [Google Scholar] [CrossRef]
- Traub, V.; Vygen, J.; Zenklusen, R. Reducing Path TSP to TSP. In Proceedings of the 52nd Annual ACM SIGACT Symposium on Theory of Computing 2020, Chicago, IL, USA, 22–26 June 2020; pp. 14–27. [Google Scholar] [CrossRef]
- Cheng, H.; Zheng, H.; Cong, Y.; Jiang, W.; Pu, S. Select and Optimize: Learning to Solve Large-Scale TSP Instances. In Proceedings of the International Conference on Artificial Intelligence and Statistics, Valencia, Spain, 25–27 April 2023; pp. 1219–1231. [Google Scholar] [CrossRef]
- Gomes, D.E.; Iglésias, M.I.D.; Proença, A.P.; Lima, T.M.; Gaspar, P.D. Applying a Genetic Algorithm to a m-TSP: Case Study of a Decision Support System for Optimizing a Beverage Logistics Vehicles Routing Problem. Electronics 2021, 10, 2298. [Google Scholar] [CrossRef]
- Akopov, A.S.; Beklaryan, L.A. Traffic Improvement in Manhattan Road Networks With the Use of Parallel Hybrid Biobjective Genetic Algorithm. IEEE Veh. Technol. Soc. Sect. 2024, 12, 19532–19547. [Google Scholar] [CrossRef]
- Kou, L.; Wang, Y.; Zhang, F.; Yuan, Q.; Wang, Z.; Wen, J.; Ke, W. A Chaotic Simulated Annealing Genetic Algorithm with Asymmetric Time for Offshore Wind Farm Inspection Path Planning. Int. J. Bio-Inspired Comput. 2025, 25, 69–78. [Google Scholar] [CrossRef]
- Zainuddin, F.A.; Abd Samad, M.F.; Jamaluddin, H.; Azad, A.K.M. A Novel Single Parent Mating Technique in Genetic Algorithm for Discrete-Time System Identification. J. Adv. Res. Appl. Sci. Eng. Technol. 2024, 42, 49–57. [Google Scholar] [CrossRef]
- Kralev, V.; Kraleva, R. Combining Genetic Algorithm with Local Search Method in Solving Optimization Problems. Electronics 2024, 13, 4126. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, T. Travel route planning based on genetic algorithm and greedy algorithm. Sci. J. Technol. 2025, 7, 125–134. [Google Scholar] [CrossRef]
- Ban, H.; Pham, H.-D. A Multi-Population Multi-Tasking Tabu Search with Variable Neighborhood Search Algorithm to Solve Post-Disaster Clustered Repairman Problem with Priorities. Appl. Soft Comput. 2024, 170, 112655. [Google Scholar] [CrossRef]
- Chen, J.; Tan, D. Partheno-genetic algorithm based on explore-develop-jump strategy for solving traveling salesman problem. Comput. Appl. Res. 2023, 40, 1375–1384. [Google Scholar] [CrossRef]
- Xia, D.; Wu, X.; Yan, M.; Xiong, C. An Adaptive Stochastic Ranking-Based Tournament Selection Method for Differential Evolution. J. Supercomput. 2024, 80, 20–49. [Google Scholar] [CrossRef]
- Alipour, M.M.; Razavi, S.N.; Feizi Derakhshi, M.R.; Balafar, M.A. A hybrid algorithm using a genetic algorithm and multiagent reinforcement learning heuristic to solve the traveling salesman problem. Neural Comput. Appl. 2017, 28, 3273–3286. [Google Scholar] [CrossRef]
- Ruoyu, W.; Yongquan, C. Solution construction methods based on reinforcement learning for the traveling salesman problem. Comput. Eng. 2020, 46, 293–300. [Google Scholar] [CrossRef]
- Xu, W.; Wei, C.; Zhang, G.; Zhao, C.; Xiong, J. Solving the traveling salesman problem using a genetic algorithm based on K-nearest neighborhood search. J. Kunming Univ. Sci. Technol. 2022, 47, 139–144. [Google Scholar] [CrossRef]
- Chen, G.; Gao, J.; Chen, D. Research on Vehicle Routing Problem with Time Windows Based on Improved Genetic Algorithm and Ant Colony Algorithm. Electronics 2025, 14, 647. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | opt | Best | Ave | BER | MER |
|---|---|---|---|---|---|
| Dantzig42 | 699 | 679.2019 | 679.2019 | −2.83% | −2.83% |
| Att48 | 33,522 | 33,523.7085 | 33,523.7085 | 0.01% | 0.01% |
| Berlin52 | 7542 | 7544.3659 | 7544.3659 | 0.03% | 0.03% |
| St70 | 675 | 677.10 | 677.10 | 0.31% | 0.31% |
| Kroa100 | 21,282 | 21,285.4432 | 21,285.4432 | 0.02% | 0.02% |
| Lin105 | 14,379 | 14,382.9959 | 14,382.9959 | 0.03% | 0.03% |
| Ch130 | 6110 | 6110.7222 | 6124.9377 | 0.01% | 0.24% |
| Pr136 | 96,772 | 96,770.9241 | 96,830.8413 | 0.00% | 0.06% |
| Pr144 | 58,538 | 58,535.2218 | 58,535.2217 | 0.00% | 0.00% |
| Ch150 | 6528 | 6530.9027 | 6540.3945 | 0.04% | 0.19% |
| U159 | 42,080 | 42,075.67 | 42,203.3144 | −0.01% | 0.29% |
| D198 | 15,780 | 15,811.3409 | 15,819.6250 | 0.20% | 0.25% |
| Kroa200 | 29,368 | 29,369.407 | 29,394.6303 | 0.00% | 0.09% |
| Tsp225 | 3916 | 3859 | 3873.9290 | −1.46% | −1.07% |
| Pr299 | 48,191 | 48,194.9201 | 48,261.5208 | 0.01% | 0.14% |
| Lin318 | 42,029 | 42,042.5351 | 42,276.9490 | 0.03% | 0.59% |
| Rd400 | 15,281 | 15,329.5502 | 15,437.8763 | 0.32% | 1.03% |
| U574 | 36,905 | 37,157.1691 | 37,306.2480 | 0.68% | 1.09% |
| P654 | 34,643 | 34,646.8347 | 34,661.0811 | 0.01% | 0.05% |
| Rat783 | 8806 | 8918.7385 | 8960.4201 | 1.28% | 1.75% |
| pr1002 | 259,045 | 261,674.2336 | 262,736.7642 | 1.01% | 1.43% |
| Datasets | Algorithms | Opt | Best | Ave |
|---|---|---|---|---|
| Kroa100 | SCM-SPGA | 21,282 | 21,285.4432 | 21,285.4432 |
| EDJS-PGA | 21,285.4432 | 21,285.4432 | ||
| GA + MARL | 21,282 | 21,354.4 | ||
| ILSA | 21,282 | 21,346.1 | ||
| IGA | 21,282 | 21,282 | ||
| Tsp225 | SCM-SPGA | 3916 | 3859 | 3873.9290 |
| EDJS-PGA | 3859 | 3898.38 | ||
| GA + MARL | 3865 | 3925.33 | ||
| ILSA | 3945 | 4052.3 | ||
| IGA | 3938 | 3961.20 | ||
| Pr299 | SCM-SPGA | 48,191 | 48,194.9201 | 48,273.9234 |
| EDJS-PGA | 48,195 | 48,261.5208 | ||
| GA + MARL | NA | NA | ||
| ILSA | 48,720 | 50,113.8 | ||
| IGA | NA | NA | ||
| Lin318 | SCM-SPGA | 42,029 | 42,042.5351 | 42,276.9490 |
| EDJS-PGA | 42,072.96 | 42,325.48 | ||
| GA + MARL | 42,255 | 42,996.63 | ||
| ILSA | 42,277 | 43,240 | ||
| IGA | 42,321 | 42,560.1 | ||
| Rd400 | SCM-SPGA | 15,281 | 15,329.5502 | 15,437.8763 |
| EDJS-PGA | 15,371.8 | 15,441.98 | ||
| GA + MARL | 15,382 | 15,489.7 | ||
| ILSA | 15,618 | 15,997.3 | ||
| IGA | 15,149 | 15,427.90 |
| Attraction Number | Attraction Names |
|---|---|
| S1 | Hainan Province, Wenchang City, Hainan Tonggu Ridge Scenic Area |
| S2 | Qiongzhong Li and Miao Autonomous County, Baisha Uprising Memorial Park |
| S3 | Hainan Province, Haikou City, Qiongshan District, Hainan Provincial Museum |
| S4 | Hainan Province, Qionghai City, Chunhui Coconut Culture Tourism Park |
| S5 | Nanshan Cultural Tourism Zone |
| S6 | Dadonghai Cave Scenic Area |
| S7 | Hainan Yanoda Rainforest Cultural Tourism Zone |
| S8 | Hainan Fenjiezhou Island Tourist Area |
| S9 | Binglang Valley Li and Miao Culture Tourism Zone |
| S10 | Wuzhizhou Island Tourist Area |
| S11 | Hainan Tropical Wildlife and Botanical Garden |
| S12 | China Leiqiong Haikou Volcano Group Global Geopark |
| S13 | Holiday Beach Tourist Area |
| S14 | Haikou Mission Hills Resort and Tourist Area |
| S15 | Tianya Haijiao Scenic Area |
| S16 | Yalong Bay Aiyuan Beach Resort |
| S17 | Sanya Dadonghai Tourist Area |
| S18 | Sanya West Island Marine Culture Tourist Area |
| S19 | Yalong Bay Tropical Paradise Forest Tourism Area |
| S20 | Bo’ao Asia Forum Permanent Venue Scenic Area |
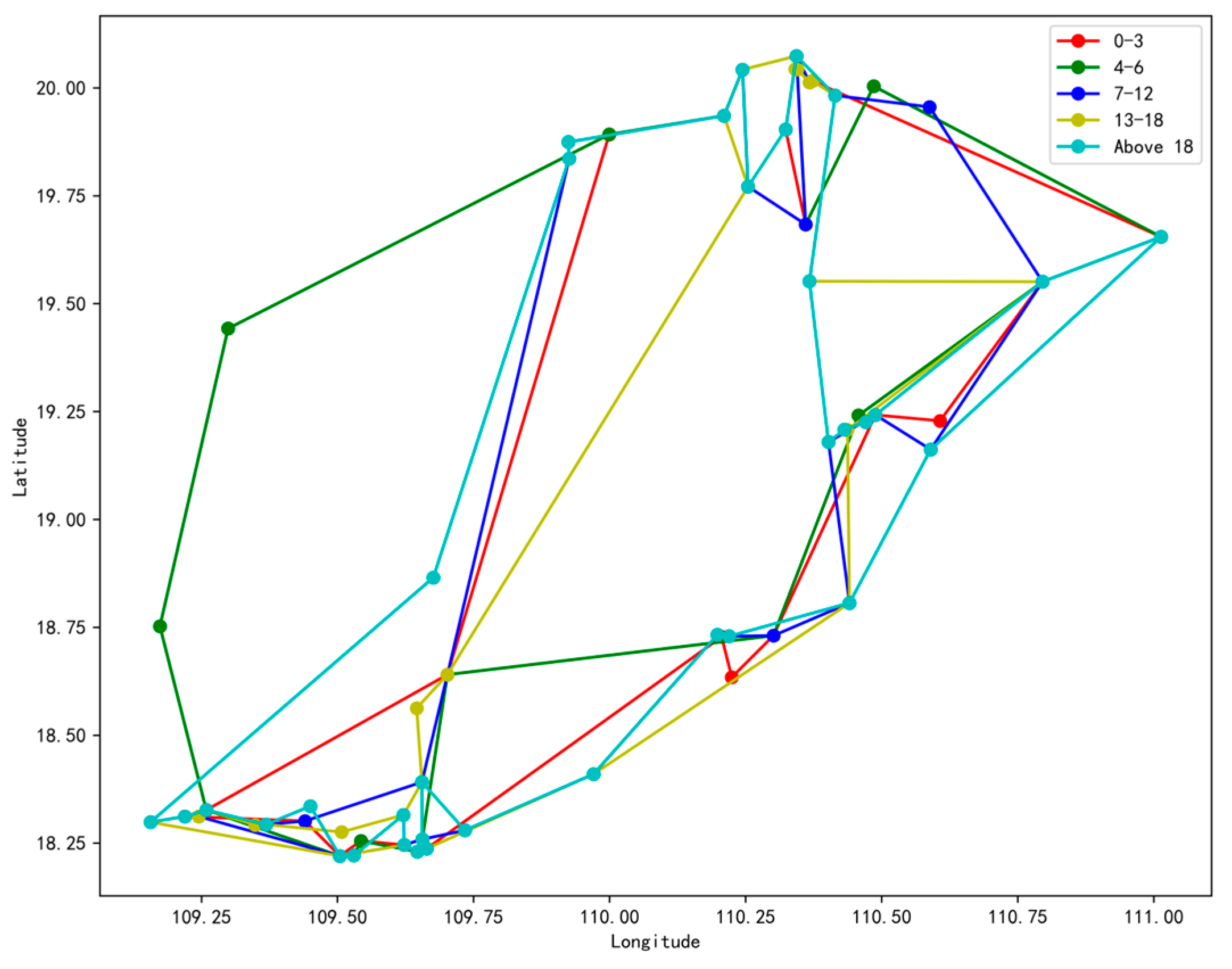
| Age Group | Travel Route | Path Length (km) |
|---|---|---|
| 0–3 | S3 → S26 → S29 → S14 → S56 → S11 → S13 → S12 → S80 → S25 → S37 → S5 → S53 → S31 → S33 → S35 → S16 → S19 → S34 → S68 → S67 → S45 → S55 → S94 → S39 → S63 | 476.3535 |
| 4–6 | S13 → S12 → S80 → S46 → S81 → S37 → S31 → S17 → S33 → S16 → S19 → S25 → S45 → S65 → S39 → S63 → S87 → S56 → S29 | 478.8156 |
| 7–12 | S11 → S13 → S12 → S50 → S49 → S25 → S9 → S53 → S18 → S37 → S32 → S31 → S35 → S19 → S10 → S23 → S44 → S21 → S45 → S22 → S43 → S55 → S41 → S39 → S57 → S27 → S3 → S26 → S29 → S56 | 442.4817 |
| 13–18 | S38 → S18 → S15 → S37 → S32 → S5 → S6 → S31 → S35 → S16 → S19 → S34 → S23 → S22 → S4 → S39 → S24 → S27 → S3 → S26 → S28 → S30 → S29 → S13 → S12 → S11 → S25 → S7 → S9 → S36 | 448.9341 |
| Above 18 | S50 → S49 → S48 → S6 → S5 → S37 → S18 → S59 → S31 → S17 → S36 → S35 → S16 → S34 → S19 → S9 → S10 → S23 → S44 → S21 → S22 → S41 → S63 → S39 → S55 → S54 → S40 → S43 → S24 → S27 → S29 → S14 → S11 → S13 → S12 | 516.4713 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.-H.; Liu, X.-W. Research on the Application of Single-Parent Genetic Algorithm Improved by Sine Chaotic Mapping in Parent–Child Travel Path Optimization. Electronics 2025, 14, 1894. https://doi.org/10.3390/electronics14091894
Wang Z-H, Liu X-W. Research on the Application of Single-Parent Genetic Algorithm Improved by Sine Chaotic Mapping in Parent–Child Travel Path Optimization. Electronics. 2025; 14(9):1894. https://doi.org/10.3390/electronics14091894
Chicago/Turabian StyleWang, Zhi-Heng, and Xiao-Wen Liu. 2025. "Research on the Application of Single-Parent Genetic Algorithm Improved by Sine Chaotic Mapping in Parent–Child Travel Path Optimization" Electronics 14, no. 9: 1894. https://doi.org/10.3390/electronics14091894
APA StyleWang, Z.-H., & Liu, X.-W. (2025). Research on the Application of Single-Parent Genetic Algorithm Improved by Sine Chaotic Mapping in Parent–Child Travel Path Optimization. Electronics, 14(9), 1894. https://doi.org/10.3390/electronics14091894