
The Role of AI in Smart Mobility: A Comprehensive Survey

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
1.1. Related Works
1.2. Motivation and Contribution
1.3. Methodology
1.4. Structure
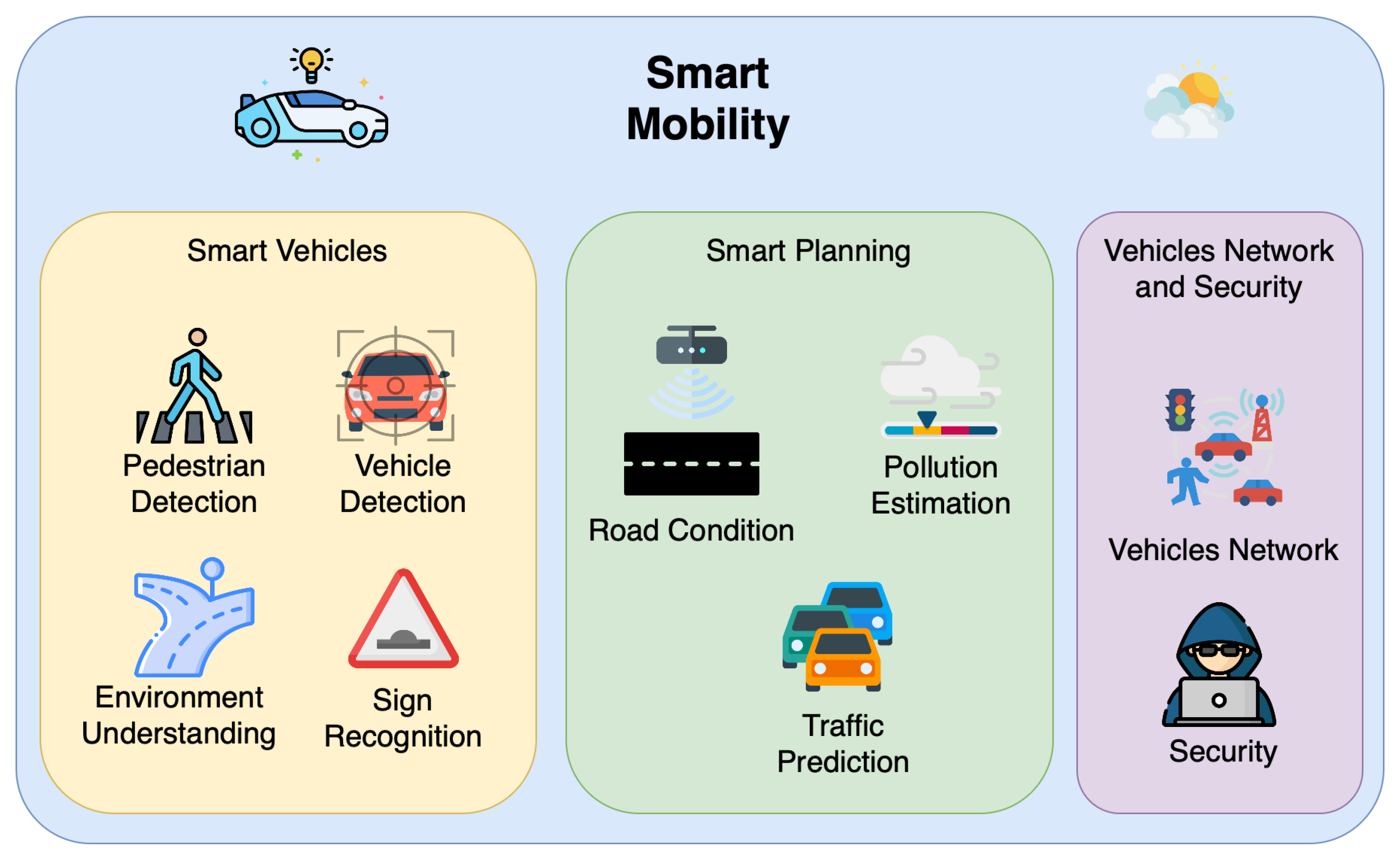
2. Smart Vehicles
2.1. Hardware Layer
2.2. Perception and Control Layer
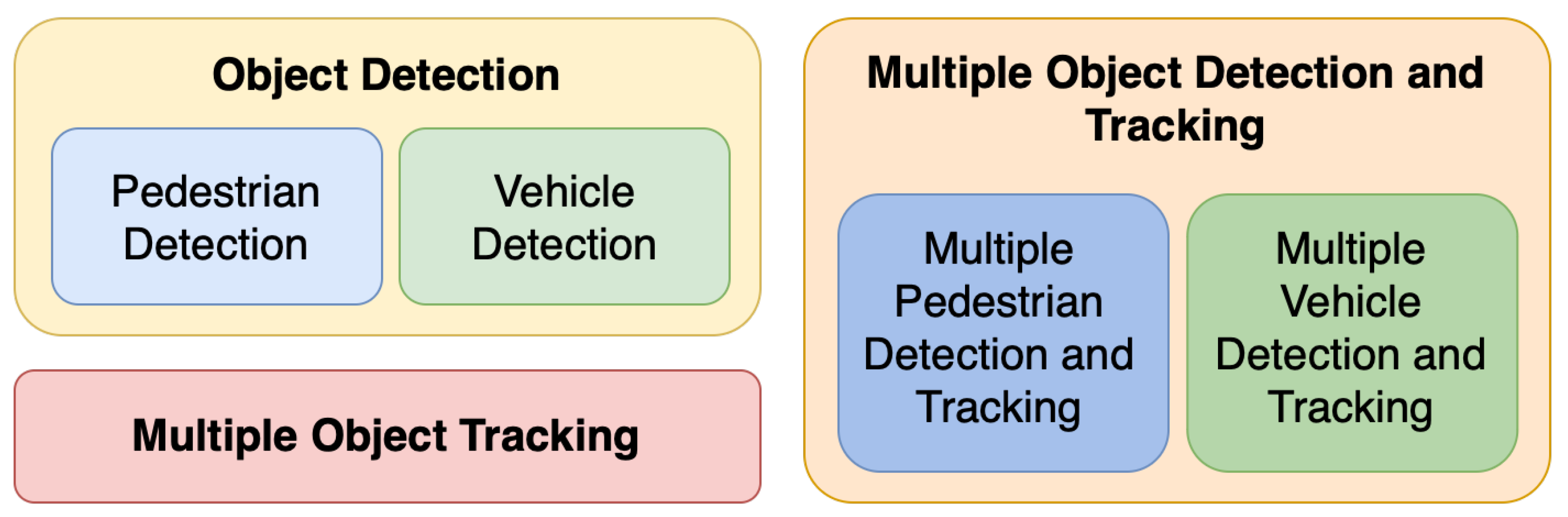
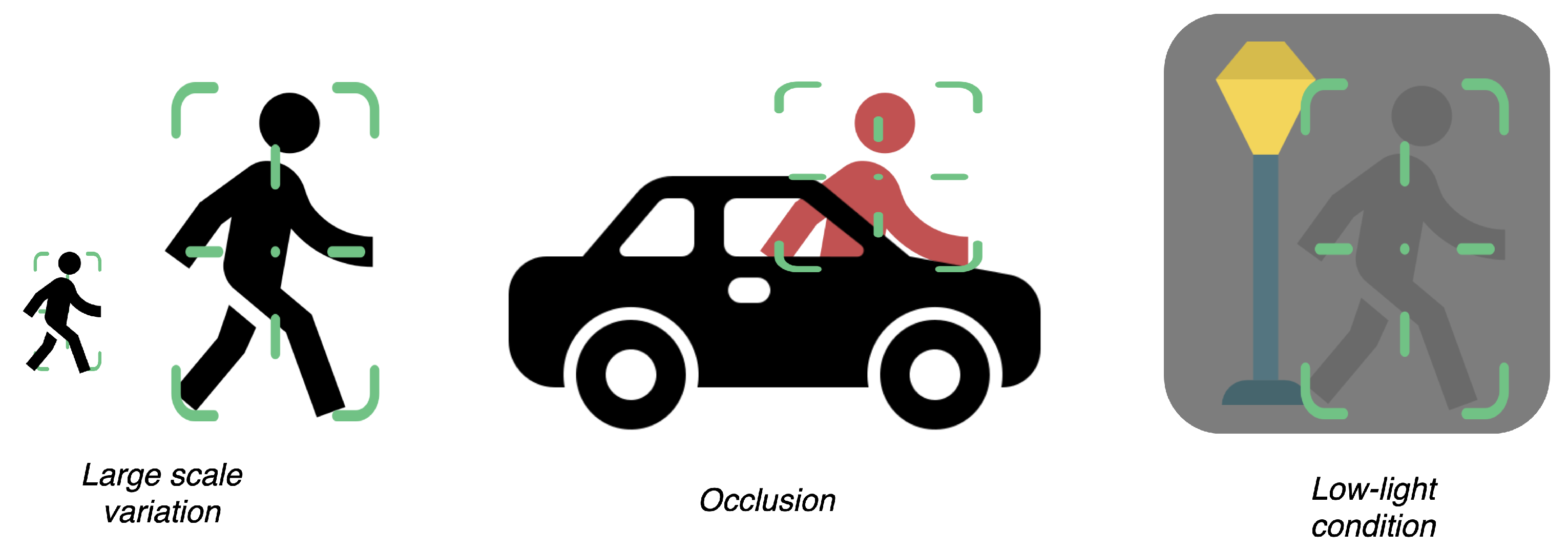
2.2.1. Pedestrians and Vehicles

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work (Y) | Target | Goal | Key Aspect |
|---|---|---|---|
| [33] (2015) | P | D | Detection by parts |
| [50] (2017) | V | D | Convolutional 3D detection |
| [51] (2017) | P | T | Recurrent neural networks |
| [52] (2018) | V | D | Multi-modality (LiDAR + RGB) |
| [39] (2020) | P | D | LiDAR–RGB fusion |
| [26] (2021) | P | D | Region proposal |
| [49] (2021) | P | A | Multi-modality (LiDAR + RGB) |
| [53] (2021) | V | DT | YOLO and DeepSORT |
| [54] (2022) | V | D | Convolutional block attention |
| [31] (2023) | P | D | Anchor-free detection |
| [55] (2024) | PD | T | Unifying Foundation Trackers |
2.2.2. Road Infrastructure
3. Smart Planning
3.1. Traffic Prediction
| Work (Y) | Goal/Target | Method | Metrics | Data |
|---|---|---|---|---|
| [103] (2021) | Survey of ST data in TP | LR | N/A | Various public datasets |
| [104] (2021) | Survey of DL in TP | LR | N/A | METR-LA, PEMS, etc. |
| [105] (2021) | Shortest-path planning | GP3 | Path reliability and runtime | Transportation network data |
| [106] (2018) | Ride-sharing path planning | Online path planning | Travel time and efficiency | Simulated and GPS data |
| [107] (2024) | TCP | TSANet | Accuracy and F1-Score | Aerial video datasets |
| [108] (2024) | TFP using ST data | GSTTN | MAE, RMSE, and MAPE | METR-LA and PEMS-BAY |
| [109] (2024) | TP | ST-DAGCN | MAE, RMSE, and MAPE | PEMS-BAY and Los-loop |
| [110] (2024) | TSP | PSO+GA+LSTM | RMSE, MAE, and MDAE | Registered vehicle probe data |
| [111] (2021) | TFP | STGCN+BiLSTM | MAE, RMSE, and MAPE | Urban sensor data |
| [113] (2023) | Delay-aware long-range TFP prediction | MAE, RMSE, and MAPE | Delay-tagged traffic data | Public traffic data |
| [114] (2020) | TVP and TSP | GMAN | MAE, RMSE, and MAPE | Xiamen and PEMS |
3.2. Pollution Estimation
3.3. Road Conditions
4. Vehicle Networks and Security
4.1. Type of Attack and ML-Based Security Solution
4.1.1. Attack Detection
4.1.2. Intrusion Detection and Misbehaviour
4.1.3. Adversarial ML Attacks
4.2. Privacy Protection
5. Datasets
| Dataset | Year | Sensor | Task | Size | Ref. |
|---|---|---|---|---|---|
| Caltech [175] | 2009 | FVC, LID, GPS, and IMU | VDT and PDT | ~100 k | [28] |
| KITTY [171] | 2012 | FVC | 3D DT and SU | ~500 | [63] |
| CityPersons [176] | 2017 | FVC | PD | ~5000 | [66] |
| MOT Challenge [187] | 2017 | FVC | DT | ~60 k | [31] |
| PIE [46] | 2019 | FVC | AR | ~2 k | [66] |
| JAAD [47] | 2017 | FVC | AR | ~350 | [66] |
| ApolloScape [177] | 2018 | FVC, GPS, and IMU | SU | ~2.5 h | [82] |
| WoodScape [178] | 2019 | 360°view, GPS, CAN, and IMU | SU | ~100 k | [86] |
| Mapillary [188] | 2020 | FVC | SU | 25,000 | [189] |
| nuScenes [190] | 2019 | 360°view, LID, GPS CAN, IMU, radar, and HM | SU | 1000 | [87] |
| Argoverse [191,192] | 2019 | 360°view, HM | SU | 324 k | [67] |
| Mapillary TSD [179] | 2020 | FVC | SD | ~100 k | [80] |
| CCTSDB [180] | 2021 | FVC | SD | ~16.5 k | [74] |
| OpenLane V2 [193] | 2023 | MVI and LID | SU | ~100 k | [92] |
| Road Anomaly [98] | 2019 | FVC | RA | ~61 | [100] |
| Lost and Found [99] | 2016 | FVC | RA | ~2104 | [101] |
| RDD-2020 [181] | 2020 | FVC | RA | ~26,620 | [194] |
| OpenStreetMap [195] | 2025 | N/A | N | Worldwide | [196] |
| Transportation networks [183] | 2016 | N/A | N | N/A | [105] |
| NYC Taxi Data [182] | 2014 | N/A | N | 4 years | [106] |
| comma2k19 [156] | 2018 | GPS | N | ~33 h | [146] |
| Beijing Multi-Site AQ [184] | 2017 | AQS | E | 4 years | [122] |
| Madrid AQ [185] | 2019 | AQS | E | 18 years | [120] |
| VeReMi [186] | 2018 | Simulation | MD | 225 simulations | [150] |
6. Practical Implementations of AI in Smart Mobility
7. Discussions, Open Challenges, and Future Directions
7.1. Open Challenges
- Computational limitations:
- Current state-of-the-art object recognition and context segmentation systems based on deep learning (e.g., YOLO [198] and SAM [69]) achieve impressive accuracy but at the cost of substantial computational complexity. This creates a significant barrier for deployment on resource-constrained edge devices commonly used in vehicular systems, forcing compromises between performance and practicality. Moreover, the process of adapting these research solutions for industrial applications often requires unexpected additional engineering effort and cost.
- Data and modelling challenges:
- Traffic prediction models continue to struggle with capturing the complex spatiotemporal dependencies inherent in transportation networks [104]. While current approaches can handle regular patterns well, they often fail to account for unexpected events like accidents or special occasions that dramatically alter traffic flows. Furthermore, the lack of diverse, large-scale datasets for rare but safety-critical scenarios limits our ability to develop robust systems. In air quality modelling, despite advances in AI techniques [199], significant challenges remain in integrating disparate data sources (ground sensors and satellite imagery) while maintaining model interpretability for policymakers.
- Sensor limitations:
- While sensor fusion techniques have greatly improved the reliability of autonomous vehicle perception systems [200], they still exhibit performance degradation under challenging conditions such as heavy rain, snow, or complex urban environments with many occlusions. This limitation stems from both physical sensor limitations in adverse weather and algorithmic shortcomings in handling conflicting sensor inputs.
- Network management issues:
- The highly dynamic nature of vehicular networks creates unique communication challenges [201]. During peak hours in dense urban areas, the surge in Vehicle-to-Vehicle and Vehicle-to-Infrastructure communication can lead to network congestion, which existing protocols struggle to handle effectively. This becomes particularly problematic for safety-critical messages that require guaranteed low-latency delivery.
- Security vulnerabilities:
- The increasing reliance on machine learning for critical vehicle functions has introduced new attack vectors [12,202]. Adversarial attacks that subtly manipulate sensor inputs can cause dangerous misperceptions, while more direct attacks on vehicle control systems could have catastrophic consequences. Current defence mechanisms remain largely reactive and specialised in specific attack types.
- Ethical and legal concerns:
- The “trolley problem” and similar ethical dilemmas [203] highlight fundamental questions about how autonomous vehicles should make life-and-death decisions in unavoidable accident scenarios. Beyond these philosophical questions, practical legal frameworks for determining liability in AV-related accidents remain underdeveloped. Additionally, the massive data collection required for smart mobility systems raises significant privacy concerns that current regulations may not adequately address.
7.2. Future Directions
- Efficient AI development:
- Recent advances in model compression techniques like quantisation and knowledge distillation [204] show promise for deploying sophisticated AI models on edge devices. These can be complemented by lightweight AI network architectures [205] that maintain accuracy while reducing parameters through innovative designs like multi-scale context awareness. The success of specialised YOLO variants [81,206] demonstrates how task-specific optimisations can achieve real-time performance without compromising detection quality.
- Advanced modelling approaches:
- Graph Neural Networks (GNNs) present an exciting opportunity [207] to better model the complex interactions in transportation systems, particularly for applications like intersection management and urban planning that have received less attention than traffic prediction. The development of city-scale digital twins [208] offers a powerful tool for testing planning algorithms across diverse scenarios without real-world risks. Combining these with synthetic data generation [209] could dramatically accelerate development cycles while reducing costs.
- Robust perception systems:
- Next-generation perception systems must handle diverse environmental conditions, as demonstrated by NTS-YOLO’s [206] effective handling of nocturnal scenarios. Combining such condition-specific optimisations with the hybrid communication framework of [210] could create more resilient multi-modal systems. The TSD-YOLO approach [81] shows particular promise for small object detection in cluttered urban environments.
- Network optimisation:
- Novel congestion management approaches should draw lessons from heterogeneous network implementations like [211], which successfully balanced autonomous monitoring with centralised control. Their experience with dynamic resource allocation could inform QoS-aware protocols for vehicular networks.
- Trustworthy AI systems:
- The development of explainable AI (XAI) techniques [212] is crucial to building trust in autonomous systems and meeting regulatory requirements. Simultaneously, we need to move beyond ad hoc defences against adversarial attacks toward certifiably robust models that can guarantee safety under defined threat models.
- Regulatory frameworks:
- Establishing standardised datasets and testing protocols will be essential to comparing different approaches and ensuring system reliability. Blockchain technology [213] offers a potential solution for secure, transparent data management, though challenges around scalability and implementation costs must be addressed.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADAS | Advanced Driver Assistance System |
| AI | Artificial Intelligence |
| ANN | Artificial Neural Network |
| AQI | Air Quality Index |
| BGGRU | Bidirectional Graph Gated Recurrent Unit |
| BiLSTM | Bidirectional Long Short-Term Memory |
| CAN | Controller Area Network |
| CAV | Connected and Autonomous Vehicle |
| CNN | Convolutional Neural Network |
| DL | deep learning |
| DNN | Deep Neural Network |
| ECU | Electronic Control Unit |
| FL | Fuzzy Logic |
| GAN | Generative Adversarial Network |
| GCN | Graph Convolutional Network |
| GMAN | Graph Multi-Attention Network |
| GNSS | Global Navigation Satellite System |
| GRU | Gated Recurrent Unit |
| IoT | Internet of Things |
| IoV | Internet of Vehicles |
| IVN | in-vehicle network |
| LSTM | Long Short-Term Memory |
| ML | machine learning |
| MOT | multi-object tracking |
| OBD | Onboard Diagnostics |
| PDFormer | Propagation Delay-aware Dynamic Long-Range Transformer |
| PDT | Pedestrian Detection and Tracking |
| PM | Particulate Matter |
| R-CNN | Region-based Convolutional Neural Network |
| RNN | recurrent neural network |
| SAM | Segment Anything Model |
| SVM | Support Vector Machines |
| ST-DAGCN | Spatiotemporal Dual-Adaptive Graph Convolutional Network |
| TSANet | Traffic State Anticipation Network |
| V2B | Vehicle-to-Building |
| V2D | Vehicle-to-Device |
| V2G | Vehicle-to-Grid |
| V2I | Vehicle-to-Infrastructure |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
| VANET | Vehicular Ad hoc Network |
| XAI | explainable AI |
| YOLO | You Only Look Once |
References
- NHTSA Estimates for 2022 Show Roadway Fatalities Remain Flat After Two Years of Dramatic Increases. Available online: https://www.nhtsa.gov/press-releases/traffic-crash-death-estimates-2022 (accessed on 22 April 2025).
- Road Safety, Fatalities Rise in 2022: +4 Percent over 2021. Available online: https://www.eunews.it/en/2024/04/12/road-safety-fatalities-rise-in-2022-4-per-cent-over-2021/# (accessed on 22 April 2025).
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; Technical Report. 2015. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/812506 (accessed on 22 April 2025).
- D’orazio, T.; Leo, M.; Distante, A. Eye detection in face images for a driver vigilance system. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 8 October 2004; pp. 95–98. [Google Scholar]
- Ahmad, U.; Han, M.; Jolfaei, A.; Jabbar, S.; Ibrar, M.; Erbad, A.; Herbert Song, H.; Alkhrijah, Y. A Comprehensive Survey and Tutorial on Smart Vehicles: Emerging Technologies, Security Issues, and Solutions Using Machine Learning. IEEE Trans. Intell. Transp. Syst. 2024, 25, 15314–15341. [Google Scholar] [CrossRef]
- Parekh, D.; Poddar, N.; Rajpurkar, A.; Chahal, M.; Kumar, N.; Joshi, G.P.; Cho, W. A Review on Autonomous Vehicles: Progress, Methods and Challenges. Electronics 2022, 11, 2162. [Google Scholar] [CrossRef]
- Muhammad, K.; Ullah, A.; Lloret, J.; Ser, J.D.; De Albuquerque, V.H.C. Deep Learning for Safe Autonomous Driving: Current Challenges and Future Directions. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4316–4336. [Google Scholar] [CrossRef]
- Kang, Y.; Yin, H.; Berger, C. Test Your Self-Driving Algorithm: An Overview of Publicly Available Driving Datasets and Virtual Testing Environments. IEEE Trans. Intell. Veh. 2019, 4, 171–185. [Google Scholar] [CrossRef]
- Almukhalfi, H.; Noor, A.; Noor, T.H. Traffic management approaches using machine learning and deep learning techniques: A survey. Eng. Appl. Artif. Intell. 2024, 133, 108147. [Google Scholar] [CrossRef]
- Ranyal, E.; Sadhu, A.; Jain, K. Road Condition Monitoring Using Smart Sensing and Artificial Intelligence: A Review. Sensors 2022, 22, 3044. [Google Scholar] [CrossRef]
- Elkhail, A.A.; Refat, R.U.D.; Habre, R.; Hafeez, A.; Bacha, A.; Malik, H. Vehicle Security: A Survey of Security Issues and Vulnerabilities, Malware Attacks and Defenses. IEEE Access 2021, 9, 162401–162437. [Google Scholar] [CrossRef]
- Qayyum, A.; Usama, M.; Qadir, J.; Al-Fuqaha, A. Securing Connected & Autonomous Vehicles: Challenges Posed by Adversarial Machine Learning and the Way Forward. IEEE Commun. Surv. Tutor. 2020, 22, 998–1026. [Google Scholar] [CrossRef]
- Wu, Y.; Dai, H.N.; Wang, H.; Xiong, Z.; Guo, S. A survey of intelligent network slicing management for industrial IoT: Integrated approaches for smart transportation, smart energy, and smart factory. IEEE Commun. Surv. Tutor. 2022, 24, 1175–1211. [Google Scholar] [CrossRef]
- Alzahrani, M.; Wang, Q.; Liao, W.; Chen, X.; Yu, W. Survey on multi-task learning in smart transportation. IEEE Access 2024, 12, 17023–17044. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Wang, H.; Zeng, J.; Xu, H.; Cai, P.; Chen, L.; Yan, J.; Xu, F.; Xiong, L.; et al. Open-sourced data ecosystem in autonomous driving: The present and future. arXiv 2023, arXiv:2312.03408. [Google Scholar]
- Han, X.; Meng, Z.; Xia, X.; Liao, X.; He, B.Y.; Zheng, Z.; Wang, Y.; Xiang, H.; Zhou, Z.; Gao, L.; et al. Foundation Intelligence for Smart Infrastructure Services in Transportation 5.0. IEEE Trans. Intell. Veh. 2024, 9, 39–47. [Google Scholar] [CrossRef]
- Taraba, M.; Adamec, J.; Danko, M.; Drgona, P. Utilization of modern sensors in autonomous vehicles. In Proceedings of the 2018 ELEKTRO, Mikulov, Czech Republic, 21–23 May 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Richards, M.A. Fundamentals of Radar Signal Processing, 2nd ed.; McGraw-Hill Education: New York, NY, USA, 2014. [Google Scholar]
- Talbot, S.C.; Ren, S. Comparision of FieldBus Systems CAN, TTCAN, FlexRay and LIN in Passenger Vehicles. In Proceedings of the 2009 29th IEEE International Conference on Distributed Computing Systems Workshops, Montreal, QC, Canada, 22–26 June 2009; pp. 26–31. [Google Scholar] [CrossRef]
- Camara, F.; Bellotto, N.; Cosar, S.; Weber, F.; Nathanael, D.; Althoff, M.; Wu, J.; Ruenz, J.; Dietrich, A.; Markkula, G.; et al. Pedestrian models for autonomous driving part ii: High-level models of human behavior. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5453–5472. [Google Scholar] [CrossRef]
- Ravindran, R.; Santora, M.J.; Jamali, M.M. Multi-Object Detection and Tracking, Based on DNN, for Autonomous Vehicles: A Review. IEEE Sens. J. 2021, 21, 5668–5677. [Google Scholar] [CrossRef]
- Sun, Z.; Chen, J.; Chao, L.; Ruan, W.; Mukherjee, M. A Survey of Multiple Pedestrian Tracking Based on Tracking-by-Detection Framework. IEEE Trans. Circuits Syst. Video Technol. 2021, 31, 1819–1833. [Google Scholar] [CrossRef]
- Zhang, C.; Berger, C. Pedestrian Behavior Prediction Using Deep Learning Methods for Urban Scenarios: A Review. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10279–10301. [Google Scholar] [CrossRef]
- Ning, C.; Menglu, L.; Hao, Y.; Xueping, S.; Yunhong, L. Survey of pedestrian detection with occlusion. Complex Intell. Syst. 2021, 7, 577–587. [Google Scholar] [CrossRef]
- Cao, J.; Pang, Y.; Xie, J.; Khan, F.S.; Shao, L. From Handcrafted to Deep Features for Pedestrian Detection: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 4913–4934. [Google Scholar] [CrossRef]
- Shivappriya, S.N.; Priyadarsini, M.J.P.; Stateczny, A.; Puttamadappa, C.; Parameshachari, B.D. Cascade Object Detection and Remote Sensing Object Detection Method Based on Trainable Activation Function. Remote Sens. 2021, 13, 200. [Google Scholar] [CrossRef]
- Indapwar, A.; Choudhary, J.; Singh, D.P. Survey of Real-Time Object Detection for Logo Detection System. In Intelligent Systems; Sheth, A., Sinhal, A., Shrivastava, A., Pandey, A.K., Eds.; Series Title: Algorithms for Intelligent Systems; Springer: Singapore, 2021; pp. 61–72. [Google Scholar] [CrossRef]
- Khan, A.H.; Munir, M.; van Elst, L.; Dengel, A. F2dnet: Fast focal detection network for pedestrian detection. In Proceedings of the 2022 26th International Conference on Pattern Recognition (ICPR), Montreal, QC, Canada, 21–25 August 2022; pp. 4658–4664. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. Version Number: 5. arXiv 2015, arXiv:1506.02640. [Google Scholar]
- Xiao, X.; Wang, B.; Miao, L.; Li, L.; Zhou, Z.; Ma, J.; Dong, D. Infrared and Visible Image Object Detection via Focused Feature Enhancement and Cascaded Semantic Extension. Remote Sens. 2021, 13, 2538. [Google Scholar] [CrossRef]
- Khan, A.H.; Nawaz, M.S.; Dengel, A. Localized semantic feature mixers for efficient pedestrian detection in autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 5476–5485. [Google Scholar]
- Zhang, S.; Wen, L.; Bian, X.; Lei, Z.; Li, S.Z. Occlusion-Aware R-CNN: Detecting Pedestrians in a Crowd. In Computer Vision—ECCV 2018; Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y., Eds.; Series Title: Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2018; Volume 11207, pp. 657–674. [Google Scholar] [CrossRef]
- Tian, Y.; Luo, P.; Wang, X.; Tang, X. Deep Learning Strong Parts for Pedestrian Detection. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 13–16 December 2015; pp. 1904–1912. [Google Scholar] [CrossRef]
- Hwang, S.; Park, J.; Kim, N.; Choi, Y.; Kweon, I.S. Multispectral pedestrian detection: Benchmark dataset and baseline. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1037–1045. [Google Scholar] [CrossRef]
- Hangil, C.; Kim, S.; Kihong, P.; Sohn, K. Multi-spectral pedestrian detection based on accumulated object proposal with fully convolutional networks. In Proceedings of the 2016 23rd International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016; pp. 621–626. [Google Scholar] [CrossRef]
- Hou, Y.L.; Song, Y.; Hao, X.; Shen, Y.; Qian, M. Multispectral pedestrian detection based on deep convolutional neural networks. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xiamen, China, 22–25 October 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Dinakaran, R.K.; Easom, P.; Bouridane, A.; Zhang, L.; Jiang, R.; Mehboob, F.; Rauf, A. Deep Learning Based Pedestrian Detection at Distance in Smart Cities. In Intelligent Systems and Applications; Bi, Y., Bhatia, R., Kapoor, S., Eds.; Series Title: Advances in Intelligent Systems and Computing; Springer International Publishing: Cham, Switzerland, 2020; Volume 1038, pp. 588–593. [Google Scholar] [CrossRef]
- Navarro, P.; Fernández, C.; Borraz, R.; Alonso, D. A Machine Learning Approach to Pedestrian Detection for Autonomous Vehicles Using High-Definition 3D Range Data. Sensors 2016, 17, 18. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Sun, P.; Xu, Z.; Min, H.; Yu, H. Fusion of 3D LIDAR and Camera Data for Object Detection in Autonomous Vehicle Applications. IEEE Sens. J. 2020, 20, 4901–4913. [Google Scholar] [CrossRef]
- Palffy, A.; Kooij, J.F.P.; Gavrila, D.M. Occlusion aware sensor fusion for early crossing pedestrian detection. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 1768–1774. [Google Scholar] [CrossRef]
- Zhu, X.; Fu, W.; Xu, X. Intent Prediction of Pedestrians via Integration of Facial Expression and Human 2D Skeleton for Autonomous Car-like Mobile Robots. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 1775–1780. [Google Scholar]
- Galvão, L.G.; Huda, M.N. Pedestrian and vehicle behaviour prediction in autonomous vehicle system—A review. Expert Syst. Appl. 2024, 238, 121983. [Google Scholar] [CrossRef]
- Dimiccoli, M.; Cartas, A.; Radeva, P. Activity recognition from visual lifelogs: State of the art and future challenges. In Multimodal Behavior Analysis in the Wild; Elsevier: Amsterdam, The Netherlands, 2019; pp. 121–134. [Google Scholar] [CrossRef]
- Huang, J.; Gautam, A.; Saripalli, S. Learning Pedestrian Actions to Ensure Safe Autonomous Driving. In Proceedings of the 2023 IEEE Intelligent Vehicles Symposium (IV), Anchorage, AK, USA, 4–7 June 2023; pp. 1–8. [Google Scholar]
- Kotseruba, I.; Rasouli, A.; Tsotsos, J.K. Benchmark for Evaluating Pedestrian Action Prediction. In Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2021; pp. 1257–1267. [Google Scholar] [CrossRef]
- Rasouli, A.; Kotseruba, I.; Kunic, T.; Tsotsos, J. PIE: A Large-Scale Dataset and Models for Pedestrian Intention Estimation and Trajectory Prediction. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 6261–6270. [Google Scholar] [CrossRef]
- Rasouli, A.; Kotseruba, I.; Tsotsos, J.K. Are They Going to Cross? A Benchmark Dataset and Baseline for Pedestrian Crosswalk Behavior. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 206–213. [Google Scholar] [CrossRef]
- Lorenzo, J.; Alonso, I.P.; Izquierdo, R.; Ballardini, A.L.; Saz, H.; Llorca, D.F.; Sotelo, M. CAPformer: Pedestrian Crossing Action Prediction Using Transformer. Sensors 2021, 21, 5694. [Google Scholar] [CrossRef]
- Rasouli, A.; Rohani, M.; Luo, J. Bifold and Semantic Reasoning for Pedestrian Behavior Prediction. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 11–17 October 2021; pp. 15580–15590. [Google Scholar] [CrossRef]
- Li, B. 3D fully convolutional network for vehicle detection in point cloud. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1513–1518. [Google Scholar] [CrossRef]
- Milan, A.; Rezatofighi, S.H.; Dick, A.; Reid, I.; Schindler, K. Online Multi-Target Tracking Using Recurrent Neural Networks. Proc. AAAI Conf. Artif. Intell. 2017, 31, 4225–4232. [Google Scholar] [CrossRef]
- Asvadi, A.; Garrote, L.; Premebida, C.; Peixoto, P.; Nunes, U.J. Multimodal vehicle detection: Fusing 3D-LIDAR and color camera data. Pattern Recognit. Lett. 2018, 115, 20–29. [Google Scholar] [CrossRef]
- Bin Zuraimi, M.A.; Kamaru Zaman, F.H. Vehicle Detection and Tracking using YOLO and DeepSORT. In Proceedings of the 2021 IEEE 11th IEEE Symposium on Computer Applications & Industrial Electronics (ISCAIE), Penang, Malaysia, 3–4 April 2021; pp. 23–29. [Google Scholar] [CrossRef]
- Dong, X.; Yan, S.; Duan, C. A lightweight vehicles detection network model based on YOLOv5. Eng. Appl. Artif. Intell. 2022, 113, 104914. [Google Scholar] [CrossRef]
- Hong, L.; Yan, S.; Zhang, R.; Li, W.; Zhou, X.; Guo, P.; Jiang, K.; Chen, Y.; Li, J.; Chen, Z.; et al. OneTracker: Unifying Visual Object Tracking with Foundation Models and Efficient Tuning. In Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 17–21 June 2024; pp. 19079–19091. [Google Scholar] [CrossRef]
- Chadwick, S.; Maddern, W.; Newman, P. Distant Vehicle Detection Using Radar and Vision. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8311–8317. [Google Scholar] [CrossRef]
- Punyavathi, G.; Neeladri, M.; K Singh, M. Vehicle tracking and detection techniques using IoT. Mater. Today Proc. 2022, 51, 909–913. [Google Scholar] [CrossRef]
- Hu, X.; Xu, X.; Xiao, Y.; Chen, H.; He, S.; Qin, J.; Heng, P.A. SINet: A Scale-Insensitive Convolutional Neural Network for Fast Vehicle Detection. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1010–1019. [Google Scholar] [CrossRef]
- Park, Y.; Dang, L.M.; Lee, S.; Han, D.; Moon, H. Multiple Object Tracking in Deep Learning Approaches: A Survey. Electronics 2021, 10, 2406. [Google Scholar] [CrossRef]
- Luo, W.; Xing, J.; Milan, A.; Zhang, X.; Liu, W.; Kim, T.K. Multiple object tracking: A literature review. Artif. Intell. 2021, 293, 103448. [Google Scholar] [CrossRef]
- Lee, B.; Erdenee, E.; Jin, S.; Rhee, P.K. Multi-Class Multi-Object Tracking using Changing Point Detection. Version Number: 1. arXiv 2016, arXiv:1608.08434. [Google Scholar]
- Chen, Y.; Shin, H. Pedestrian Detection at Night in Infrared Images Using an Attention-Guided Encoder-Decoder Convolutional Neural Network. Appl. Sci. 2020, 10, 809. [Google Scholar] [CrossRef]
- Nagy, M.; Werghi, N.; Hassan, B.; Dias, J.; Khonji, M. RobMOT: Robust 3D Multi-Object Tracking by Observational Noise and State Estimation Drift Mitigation on LiDAR PointCloud. arXiv 2024, arXiv:2405.11536. [Google Scholar]
- Leal-Taixe, L.; Fenzi, M.; Kuznetsova, A.; Rosenhahn, B.; Savarese, S. Learning an Image-Based Motion Context for Multiple People Tracking. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3542–3549. [Google Scholar] [CrossRef]
- Tang, X.; Zhang, Z.; Qin, Y. On-Road Object Detection and Tracking Based on Radar and Vision Fusion: A Review. IEEE Intell. Transp. Syst. Mag. 2022, 14, 103–128. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Y.; Xu, M.; Crandall, D.J. Stepwise goal-driven networks for trajectory prediction. IEEE Robot. Autom. Lett. 2022, 7, 2716–2723. [Google Scholar] [CrossRef]
- Zhou, Z.; Wang, J.; Li, Y.H.; Huang, Y.K. Query-centric trajectory prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 17863–17873. [Google Scholar]
- Wang, S.; Liu, H.; Wang, Q.; Zhou, Y.; Yao, Y. SMP-Track: SAM in Multi-Pedestrian Tracking. In Proceedings of the 2024 IEEE 11th International Conference on Data Science and Advanced Analytics (DSAA), San Diego, CA, USA, 6–10 October 2024; pp. 1–9. [Google Scholar] [CrossRef]
- Kirillov, A.; Mintun, E.; Ravi, N.; Mao, H.; Rolland, C.; Gustafson, L.; Xiao, T.; Whitehead, S.; Berg, A.C.; Lo, W.Y.; et al. Segment Anything. Version Number: 1. arXiv 2023, arXiv:2304.02643. [Google Scholar]
- Gao, S.; Zhou, C.; Zhang, J. Generalized Relation Modeling for Transformer Tracking. In Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 18–22 June 2023; pp. 18686–18695. [Google Scholar] [CrossRef]
- Zhu, Y.; Yan, W.Q. Traffic sign recognition based on deep learning. Multimed. Tools Appl. 2022, 81, 17779–17791. [Google Scholar] [CrossRef]
- An, F.; Wang, J.; Liu, R. Road traffic sign recognition algorithm based on cascade attention-modulation fusion mechanism. IEEE Trans. Intell. Transp. Syst. 2024, 25, 17841–17851. [Google Scholar] [CrossRef]
- Haque, W.A.; Arefin, S.; Shihavuddin, A.; Hasan, M.A. DeepThin: A novel lightweight CNN architecture for traffic sign recognition without GPU requirements. Expert Syst. Appl. 2021, 168, 114481. [Google Scholar] [CrossRef]
- Hong, H.; Zhou, Y.; Shu, X.; Hu, X. CCSPNet-joint: Efficient joint training method for traffic sign detection under extreme conditions. In Proceedings of the 2024 International Joint Conference on Neural Networks (IJCNN), Yokohama, Japan, 30 June–5 July 2024; pp. 1–8. [Google Scholar]
- Flores-Calero, M.; Astudillo, C.A.; Guevara, D.; Maza, J.; Lita, B.S.; Defaz, B.; Ante, J.S.; Zabala-Blanco, D.; Armingol Moreno, J.M. Traffic sign detection and recognition using YOLO object detection algorithm: A systematic review. Mathematics 2024, 12, 297. [Google Scholar] [CrossRef]
- Soylu, E.; Soylu, T. A performance comparison of YOLOv8 models for traffic sign detection in the Robotaxi-full scale autonomous vehicle competition. Multimed. Tools Appl. 2024, 83, 25005–25035. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Y.; Dong, Z.; Gao, M. Improved YOLOv5 network for real-time multi-scale traffic sign detection. Neural Comput. Appl. 2023, 35, 7853–7865. [Google Scholar] [CrossRef]
- Zhang, S.; Che, S.; Liu, Z.; Zhang, X. A real-time and lightweight traffic sign detection method based on ghost-YOLO. Multimed. Tools Appl. 2023, 82, 26063–26087. [Google Scholar] [CrossRef]
- Dewi, C.; Chen, R.C.; Jiang, X.; Yu, H. Deep convolutional neural network for enhancing traffic sign recognition developed on Yolo V4. Multimed. Tools Appl. 2022, 81, 37821–37845. [Google Scholar] [CrossRef]
- Zhao, R.; Tang, S.H.; Shen, J.; Supeni, E.E.B.; Rahim, S.A. Enhancing autonomous driving safety: A robust traffic sign detection and recognition model TSD-YOLO. Signal Process. 2024, 225, 109619. [Google Scholar] [CrossRef]
- Li, H.; Zhang, R.; Zhao, M. TSD-YOLO: Small traffic sign detection based on improved YOLO v8. Expert Syst. Appl. 2024, 238, 121824. [Google Scholar] [CrossRef]
- Hou, Y.; Ma, Z.; Liu, C.; Hui, T.W.; Loy, C.C. Inter-region affinity distillation for road marking segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 12486–12495. [Google Scholar]
- Li, J.; Zhan, Y.; Yun, P.; Zhou, G.; Chen, Q.; Fan, R. RoadFormer: Duplex transformer for RGB-normal semantic road scene parsing. IEEE Trans. Intell. Veh. 2024, 9, 5163–5172. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar]
- Wu, Z.; Feng, Y.; Liu, C.W.; Yu, F.; Chen, Q.; Fan, R. S3M-Net: Joint Learning of Semantic Segmentation and Stereo Matching for Autonomous Driving. IEEE Trans. Intell. Veh. 2024, 9, 3940–3951. [Google Scholar] [CrossRef]
- Paul, S.; Patterson, Z.; Bouguila, N. Fishsegssl: A semi-supervised semantic segmentation framework for fish-eye images. J. Imaging 2024, 10, 71. [Google Scholar] [CrossRef]
- Hu, H.; Wang, F.; Su, J.; Wang, Y.; Hu, L.; Fang, W.; Xu, J.; Zhang, Z. Ea-lss: Edge-aware lift-splat-shot framework for 3d bev object detection. arXiv 2023, arXiv:2303.17895. [Google Scholar]
- Luo, S.; Chen, W.; Tian, W.; Liu, R.; Hou, L.; Zhang, X.; Shen, H.; Wu, R.; Geng, S.; Zhou, Y.; et al. Delving into Multi-modal Multi-task Foundation Models for Road Scene Understanding: From Learning Paradigm Perspectives. IEEE Trans. Intell. Veh. 2024, 1–25. [Google Scholar] [CrossRef]
- Zheng, T.; Fang, H.; Zhang, Y.; Tang, W.; Yang, Z.; Liu, H.; Cai, D. Resa: Recurrent feature-shift aggregator for lane detection. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 19–21 May 2021; Volume 35, pp. 3547–3554. [Google Scholar]
- Honda, H.; Uchida, Y. CLRerNet: Improving confidence of lane detection with LaneIoU. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–8 January 2024; pp. 1176–1185. [Google Scholar]
- Zhou, H.; Zhou, H.; Chang, J.; Lu, T.; Ma, J. 3d lane detection from front or surround-view using joint-modeling & matching. IEEE Trans. Intell. Veh. 2024, 1–14. [Google Scholar]
- Wu, D.; Jia, F.; Chang, J.; Li, Z.; Sun, J.; Han, C.; Li, S.; Liu, Y.; Ge, Z.; Wang, T. The 1st-place solution for cvpr 2023 openlane topology in autonomous driving challenge. arXiv 2023, arXiv:2306.09590. [Google Scholar]
- Xi, S.; Liu, Z.; Wang, Z.; Zhang, Q.; Ding, H.; Kang, C.C.; Chen, Z. Autonomous driving roadway feature interpretation using integrated semantic analysis and domain adaptation. IEEE Access 2024, 12, 98254–98269. [Google Scholar] [CrossRef]
- Yang, L.; He, Z.; Zhao, X.; Fang, S.; Yuan, J.; He, Y.; Li, S.; Liu, S. A deep learning method for traffic light status recognition. J. Intell. Connect. Veh. 2023, 6, 173–182. [Google Scholar] [CrossRef]
- Zhang, H.; Li, F.; Liu, S.; Zhang, L.; Su, H.; Zhu, J.; Ni, L.M.; Shum, H.Y. Dino: Detr with improved denoising anchor boxes for end-to-end object detection. arXiv 2022, arXiv:2203.03605. [Google Scholar]
- VT, M.A.; Omar, M.; Ahamad, J.; Ahmad, K.; Khan, M.A. Deep Learning-Based Speed Breaker Detection. SN Comput. Sci. 2024, 5, 571. [Google Scholar] [CrossRef]
- Zhao, Y.; Lv, W.; Xu, S.; Wei, J.; Wang, G.; Dang, Q.; Liu, Y.; Chen, J. Detrs beat yolos on real-time object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–22 June 2024; pp. 16965–16974. [Google Scholar]
- Lis, K.; Nakka, K.; Fua, P.; Salzmann, M. Detecting the unexpected via image resynthesis. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 2152–2161. [Google Scholar]
- Pinggera, P.; Ramos, S.; Gehrig, S.; Franke, U.; Rother, C.; Mester, R. Lost and found: Detecting small road hazards for self-driving vehicles. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–16 October 2016; pp. 1099–1106. [Google Scholar]
- Nayal, N.; Yavuz, M.; Henriques, J.F.; Güney, F. Rba: Segmenting unknown regions rejected by all. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 1–6 October 2023; pp. 711–722. [Google Scholar]
- Rai, S.N.; Cermelli, F.; Fontanel, D.; Masone, C.; Caputo, B. Unmasking anomalies in road-scene segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 1–6 October 2023; pp. 4037–4046. [Google Scholar]
- Laskar, Z.; Vojir, T.; Grcic, M.; Melekhov, I.; Gangisettye, S.; Kannala, J.; Matas, J.; Tolias, G.; Jawahar, C.V. A Dataset for Semantic Segmentation in the Presence of Unknowns. arXiv 2025, arXiv:2503.22309. [Google Scholar]
- Yuan, H.; Li, G. A survey of traffic prediction: From spatio-temporal data to intelligent transportation. Data Sci. Eng. 2021, 6, 63–85. [Google Scholar] [CrossRef]
- Yin, X.; Wu, G.; Wei, J.; Shen, Y.; Qi, H.; Yin, B. Deep learning on traffic prediction: Methods, analysis, and future directions. IEEE Trans. Intell. Transp. Syst. 2021, 23, 4927–4943. [Google Scholar] [CrossRef]
- Guo, H.; Hou, X.; Cao, Z.; Zhang, J. GP3: Gaussian process path planning for reliable shortest path in transportation networks. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11575–11590. [Google Scholar] [CrossRef]
- Zhu, M.; Liu, X.Y.; Wang, X. An online ride-sharing path-planning strategy for public vehicle systems. IEEE Trans. Intell. Transp. Syst. 2018, 20, 616–627. [Google Scholar] [CrossRef]
- Kumar, K.N.; Roy, D.; Suman, T.A.; Vishnu, C.; Mohan, C.K. TSANet: Forecasting traffic congestion patterns from aerial videos using graphs and transformers. Pattern Recognit. 2024, 155, 110721. [Google Scholar] [CrossRef]
- Zhao, Z.; Shen, G.; Wang, L.; Kong, X. Graph Spatial-Temporal Transformer Network for Traffic Prediction. Big Data Res. 2024, 36, 100427. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, T.; Rasouli, S.; Wong, M. ST-DAGCN: A spatiotemporal dual adaptive graph convolutional network model for traffic prediction. Neurocomputing 2024, 601, 128175. [Google Scholar] [CrossRef]
- Do, V.M.; Tran, Q.H.; Le, K.G.; Vuong, X.C.; Vu, V.T. Enhanced Deep Neural Networks for Traffic Speed Forecasting Regarding Sustainable Traffic Management Using Probe Data from Registered Transport Vehicles on Multilane Roads. Sustainability 2024, 16, 2453. [Google Scholar] [CrossRef]
- Wu, S. Spatiotemporal dynamic forecasting and analysis of regional traffic flow in urban road networks using deep learning convolutional neural network. IEEE Trans. Intell. Transp. Syst. 2021, 23, 1607–1615. [Google Scholar] [CrossRef]
- Iskandaryan, D.; Ramos, F.; Trilles, S. Bidirectional convolutional LSTM for the prediction of nitrogen dioxide in the city of Madrid. PLoS ONE 2022, 17, e0269295. [Google Scholar] [CrossRef]
- Jiang, J.; Han, C.; Zhao, W.X.; Wang, J. Pdformer: Propagation delay-aware dynamic long-range transformer for traffic flow prediction. In Proceedings of the AAAI Conference on Artificial Intelligence, Washington, DC, USA, 6 September 2023; Volume 37, pp. 4365–4373. [Google Scholar]
- Zheng, C.; Fan, X.; Wang, C.; Qi, J. Gman: A graph multi-attention network for traffic prediction. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 1234–1241. [Google Scholar]
- Masood, A.; Ahmad, K. A review on emerging artificial intelligence (AI) techniques for air pollution forecasting: Fundamentals, application and performance. J. Clean. Prod. 2021, 322, 129072. [Google Scholar] [CrossRef]
- Iskandaryan, D.; Ramos, F.; Trilles, S. Application of deep learning and machine learning in air quality modeling. In Current Trends and Advances in Computer-Aided Intelligent Environmental Data Engineering; Elsevier: Amsterdam, The Netherlands, 2022; pp. 11–23. [Google Scholar]
- Matthaios, V.N.; Knibbs, L.D.; Kramer, L.J.; Crilley, L.R.; Bloss, W.J. Predicting real-time within-vehicle air pollution exposure with mass-balance and machine learning approaches using on-road and air quality data. Atmos. Environ. 2024, 318, 120233. [Google Scholar] [CrossRef]
- Heydari, A.; Majidi Nezhad, M.; Astiaso Garcia, D.; Keynia, F.; De Santoli, L. Air pollution forecasting application based on deep learning model and optimization algorithm. Clean Technol. Environ. Policy 2022, 24, 607–621. [Google Scholar] [CrossRef]
- Janarthanan, R.; Partheeban, P.; Somasundaram, K.; Elamparithi, P.N. A deep learning approach for prediction of air quality index in a metropolitan city. Sustain. Cities Soc. 2021, 67, 102720. [Google Scholar] [CrossRef]
- Iskandaryan, D.; Ramos, F.; Trilles, S. Graph neural network for air quality prediction: A case study in madrid. IEEE Access 2023, 11, 2729–2742. [Google Scholar] [CrossRef]
- Gu, Y.; Li, B.; Meng, Q. Hybrid interpretable predictive machine learning model for air pollution prediction. Neurocomputing 2022, 468, 123–136. [Google Scholar] [CrossRef]
- Jin, X.B.; Wang, Z.Y.; Kong, J.L.; Bai, Y.T.; Su, T.L.; Ma, H.J.; Chakrabarti, P. Deep spatio-temporal graph network with self-optimization for air quality prediction. Entropy 2023, 25, 247. [Google Scholar] [CrossRef]
- Ansari, M.; Alam, M. An intelligent IoT-cloud-based air pollution forecasting model using univariate time-series analysis. Arab. J. Sci. Eng. 2024, 49, 3135–3162. [Google Scholar] [CrossRef]
- Liang, Y.; Xia, Y.; Ke, S.; Wang, Y.; Wen, Q.; Zhang, J.; Zheng, Y.; Zimmermann, R. Airformer: Predicting nationwide air quality in china with transformers. In Proceedings of the AAAI Conference on Artificial Intelligence, Washington, DC, USA, 6 September 2023; Volume 37, pp. 14329–14337. [Google Scholar]
- Zhang, Z.; Zhang, S. Modeling air quality PM2. 5 forecasting using deep sparse attention-based transformer networks. Int. J. Environ. Sci. Technol. 2023, 20, 13535–13550. [Google Scholar] [CrossRef]
- Queiroz, C.A.; Gautam, S. Road Infrastructure and Economic Development: Some Diagnostic Indicators; World Bank Publications: Washington, DC, USA, 1992; Volume 921. [Google Scholar]
- Majidifard, H.; Adu-Gyamfi, Y.; Buttlar, W.G. Deep machine learning approach to develop a new asphalt pavement condition index. Constr. Build. Mater. 2020, 247, 118513. [Google Scholar] [CrossRef]
- Ahmed, T.; Ejaz, N.; Choudhury, S. Redefining Real-time Road Quality Analysis with Vision Transformers on Edge Devices. IEEE Trans. Artif. Intell. 2024, 5, 4972–4983. [Google Scholar] [CrossRef]
- Moroto, Y.; Maeda, K.; Togo, R.; Ogawa, T.; Haseyama, M. Multimodal Transformer Model Using Time-Series Data to Classify Winter Road Surface Conditions. Sensors 2024, 24, 3440. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Song, W.; Zhuang, Y.; Zhang, B.; Wu, J. Automated Multi-Type Pavement Distress Segmentation and Quantification Using Transformer Networks for Pavement Condition Index Prediction. Appl. Sci. 2024, 14, 4709. [Google Scholar] [CrossRef]
- Ji, A.; Xue, X.; Wang, Y.; Luo, X.; Xue, W. An integrated approach to automatic pixel-level crack detection and quantification of asphalt pavement. Autom. Constr. 2020, 114, 103176. [Google Scholar] [CrossRef]
- Tabernik, D.; Šela, S.; Skvarč, J.; Skočaj, D. Segmentation-based deep-learning approach for surface-defect detection. J. Intell. Manuf. 2020, 31, 759–776. [Google Scholar] [CrossRef]
- Kulambayev, B.; Astaubayeva, G.; Tleuberdiyeva, G.; Alimkulova, J.; Nussupbekova, G.; Kisseleva, O. Deep CNN Approach with Visual Features for Real-Time Pavement Crack Detection. Int. J. Adv. Comput. Sci. Appl. 2024, 15, 319–328. [Google Scholar] [CrossRef]
- Riid, A.; Louk, R.; Pihlak, R.; Tepljakov, A.; Vassiljeva, K. Pavement distress detection with deep learning using the orthoframes acquired by a mobile mapping system. Appl. Sci. 2019, 9, 4829. [Google Scholar] [CrossRef]
- Liu, C.; Wu, D.; Li, Y.; Du, Y. Large-scale pavement roughness measurements with vehicle crowdsourced data using semi-supervised learning. Transp. Res. Part C Emerg. Technol. 2021, 125, 103048. [Google Scholar] [CrossRef]
- Belmonte-Fernández, Ó.; Sansano-Sansano, E.; Trilles, S.; Caballer-Miedes, A. A reactive architectural proposal for fog/edge computing in the internet of things paradigm with application in deep learning. In Artificial Intelligence, Machine Learning, and Optimization Tools for Smart Cities: Designing for Sustainability; Springer International Publishing: Cham, Switzerland, 2022; pp. 155–175. [Google Scholar]
- Granell, C.; Kamilaris, A.; Kotsev, A.; Ostermann, F.O.; Trilles, S. Internet of things. In Manual of Digital Earth; Springer: Singapore, 2020; pp. 387–423. [Google Scholar]
- Yuan, X.; He, P.; Zhu, Q.; Li, X. Adversarial Examples: Attacks and Defenses for Deep Learning. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 2805–2824. [Google Scholar] [CrossRef]
- Philipsen, S.G.; Andersen, B.; Singh, B. Threats and Attacks to Modern Vehicles. In Proceedings of the 2021 IEEE International Conference on Internet of Things and Intelligence Systems (IoTaIS), Bandung, Indonesia, 23–24 November 2021; pp. 22–27. [Google Scholar] [CrossRef]
- Bharati, S.; Podder, P.; Mondal, M.R.H.; Robel, M.R.A. Threats and Countermeasures of Cyber Security in Direct and Remote Vehicle Communication Systems. Version Number: 1. arXiv 2020, arXiv:2006.08723. [Google Scholar]
- Koscher, K.; Czeskis, A.; Roesner, F.; Patel, S.; Kohno, T.; Checkoway, S.; McCoy, D.; Kantor, B.; Anderson, D.; Shacham, H.; et al. Experimental Security Analysis of a Modern Automobile. In Proceedings of the 2010 IEEE Symposium on Security and Privacy, Oakland, CA, USA, 16–19 May 2010; pp. 447–462. [Google Scholar] [CrossRef]
- Khanapuri, E.; Chintalapati, T.; Sharma, R.; Gerdes, R. Learning-based adversarial agent detection and identification in cyber physical systems applied to autonomous vehicular platoon. In Proceedings of the 2019 IEEE/ACM 5th International Workshop on Software Engineering for Smart Cyber-Physical Systems (SEsCPS), Montreal, QC, Canada, 28 May 2019; pp. 39–45. [Google Scholar]
- Sherazi, H.H.R.; Iqbal, R.; Ahmad, F.; Khan, Z.A.; Chaudary, M.H. DDoS attack detection: A key enabler for sustainable communication in internet of vehicles. Sustain. Comput. Inform. Syst. 2019, 23, 13–20. [Google Scholar] [CrossRef]
- Gruebler, A.; McDonald-Maier, K.D.; Alheeti, K.M.A. An intrusion detection system against black hole attacks on the communication network of self-driving cars. In Proceedings of the 2015 Sixth International Conference on Emerging Security Technologies (EST), Braunschweig, Germany, 3–5 September 2015; pp. 86–91. [Google Scholar]
- Kamel, J.; Haidar, F.; Jemaa, I.B.; Kaiser, A.; Lonc, B.; Urien, P. A misbehavior authority system for sybil attack detection in c-its. In Proceedings of the 2019 IEEE 10th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), Online, 10–12 October 2019; pp. 1117–1123. [Google Scholar]
- Dasgupta, S.; Rahman, M.; Islam, M.; Chowdhury, M. Prediction-Based GNSS Spoofing Attack Detection for Autonomous Vehicles. Version Number: 1. arXiv 2020, arXiv:2010.11722. [Google Scholar]
- Xu, Y.; Lei, M.; Li, M.; Zhao, M.; Hu, B. A new anti-jamming strategy based on deep reinforcement learning for MANET. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–5. [Google Scholar]
- Tariq, S.; Lee, S.; Woo, S.S. CANTransfer: Transfer learning based intrusion detection on a controller area network using convolutional LSTM network. In Proceedings of the 35th Annual ACM Symposium on Applied Computing, Virtual, 30 March–3 April 2020; pp. 1048–1055. [Google Scholar]
- Li, X.; Hu, Z.; Xu, M.; Wang, Y.; Ma, J. Transfer learning based intrusion detection scheme for Internet of vehicles. Inf. Sci. 2021, 547, 119–135. [Google Scholar] [CrossRef]
- Ababsa, M.; Ribouh, S.; Malki, A.; Khoukhi, L. Deep Multimodal Learning for Real-Time DDoS Attacks Detection in Internet of Vehicles. arXiv 2025, arXiv:2501.15252. [Google Scholar]
- Nazat, S.; Abdallah, M. XAI-based Feature Ensemble for Enhanced Anomaly Detection in Autonomous Driving Systems. arXiv 2024, arXiv:2410.15405. [Google Scholar]
- Ali, W.; Din, I.U.; Almogren, A.; Rodrigues, J.J.P.C. Federated Learning-Based Privacy-Aware Location Prediction Model for Internet of Vehicular Things. IEEE Trans. Veh. Technol. 2025, 74, 1968–1978. [Google Scholar] [CrossRef]
- Qu, A.; Tang, Y.; Ma, W. Adversarial attacks on deep reinforcement learning-based traffic signal control systems with colluding vehicles. ACM Trans. Intell. Syst. Technol. 2023, 14, 1–22. [Google Scholar] [CrossRef]
- Im Choi, J.; Tian, Q. Adversarial attack and defense of yolo detectors in autonomous driving scenarios. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 5–9 June 2022; pp. 1011–1017. [Google Scholar]
- Protogerou, A.; Papadopoulos, S.; Drosou, A.; Tzovaras, D.; Refanidis, I. A graph neural network method for distributed anomaly detection in IoT. Evol. Syst. 2021, 12, 19–36. [Google Scholar] [CrossRef]
- Schafer, H.; Santana, E.; Haden, A.; Biasini, R. A Commute in Data: The comma2k19 Dataset. Version Number: 1. arXiv 2018, arXiv:1812.05752. [Google Scholar]
- Sant’Ana Da Silva, E.; Pedrini, H.; Santos, A.L.D. Applying Graph Neural Networks to Support Decision Making on Collective Intelligent Transportation Systems. IEEE Trans. Netw. Serv. Manag. 2023, 20, 4085–4096. [Google Scholar] [CrossRef]
- Narayanan, S.N.; Mittal, S.; Joshi, A. OBD_SecureAlert: An Anomaly Detection System for Vehicles. In Proceedings of the 2016 IEEE International Conference on Smart Computing (SMARTCOMP), St Louis, MO, USA, 18–20 May 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Alshammari, A.; Zohdy, M.A.; Debnath, D.; Corser, G. Classification Approach for Intrusion Detection in Vehicle Systems. Wirel. Eng. Technol. 2018, 09, 79–94. [Google Scholar] [CrossRef]
- Ahmad, U.; Song, H.; Bilal, A.; Alazab, M.; Jolfaei, A. Secure Passive Keyless Entry and Start System Using Machine Learning. In Security, Privacy, and Anonymity in Computation, Communication, and Storage; Wang, G., Chen, J., Yang, L.T., Eds.; Series Title: Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2018; Volume 11342, pp. 304–313. [Google Scholar] [CrossRef]
- Ali Alheeti, K.M.; Al-Zaidi, R.; Woods, J.; McDonald-Maier, K. An intrusion detection scheme for driverless vehicles based gyroscope sensor profiling. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 8–11 January 2017; pp. 448–449. [Google Scholar] [CrossRef]
- Ahmad, U.; Song, H.; Bilal, A.; Alazab, M.; Jolfaei, A. Securing smart vehicles from relay attacks using machine learning. J. Supercomput. 2020, 76, 2665–2682. [Google Scholar] [CrossRef]
- Han, M.; Cheng, P.; Ma, S. CVNNs-IDS: Complex-Valued Neural Network Based In-Vehicle Intrusion Detection System. In Security and Privacy in Digital Economy; Yu, S., Mueller, P., Qian, J., Eds.; Series Title: Communications in Computer and Information Science; Springer: Singapore, 2020; Volume 1268, pp. 263–277. [Google Scholar] [CrossRef]
- Clark, G.; Doran, M.; Glisson, W. A Malicious Attack on the Machine Learning Policy of a Robotic System. In Proceedings of the 2018 17th IEEE International Conference on Trust, Security and Privacy in Computing and Communications/12th IEEE International Conference on Big Data Science and Engineering (TrustCom/BigDataSE), New York, NY, USA, 1–8 August 2018; pp. 516–521. [Google Scholar] [CrossRef]
- Biggio, B.; Nelson, B.; Laskov, P. Poisoning Attacks against Support Vector Machines. Version Number: 3. arXiv 2012, arXiv:1206.6389. [Google Scholar]
- Sitawarin, C.; Bhagoji, A.N.; Mosenia, A.; Chiang, M.; Mittal, P. DARTS: Deceiving Autonomous Cars with Toxic Signs. Version Number: 3. arXiv 2018, arXiv:1802.06430. [Google Scholar]
- Zhu, Y.; Miao, C.; Hajiaghajani, F.; Huai, M.; Su, L.; Qiao, C. Adversarial attacks against lidar semantic segmentation in autonomous driving. In Proceedings of the 19th ACM Conference on Embedded Networked Sensor Systems, Coimbra, Portugal, 15–17 November 2021; pp. 329–342. [Google Scholar]
- Papernot, N.; McDaniel, P.; Wu, X.; Jha, S.; Swami, A. Distillation as a Defense to Adversarial Perturbations Against Deep Neural Networks. In Proceedings of the 2016 IEEE Symposium on Security and Privacy (SP), San Jose, CA, USA, 22–26 May 2016; pp. 582–597. [Google Scholar] [CrossRef]
- Lu, J.; Issaranon, T.; Forsyth, D. SafetyNet: Detecting and Rejecting Adversarial Examples Robustly. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 446–454. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, Z.; Li, Q.; Zhou, B. Cat: Closed-loop adversarial training for safe end-to-end driving. In Proceedings of the Conference on Robot Learning, Atlanta, GA, USA, 6–9 November 2023; pp. 2357–2372. [Google Scholar]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? The KITTI vision benchmark suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar] [CrossRef]
- Villarini, B.; Radoglou-Grammatikis, P.; Lagkas, T.; Sarigiannidis, P.; Argyriou, V. Detection of Physical Adversarial Attacks on Traffic Signs for Autonomous Vehicles. In Proceedings of the 2023 IEEE International Conference on Industry 4.0, Artificial Intelligence, and Communications Technology (IAICT), Bali, Indonesia, 13–15 July 2023; pp. 31–37. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, X.; Dai, Y.; Maharjan, S.; Zhang, Y. Federated learning for data privacy preservation in vehicular cyber-physical systems. IEEE Netw. 2020, 34, 50–56. [Google Scholar] [CrossRef]
- Uprety, A.; Rawat, D.B.; Li, J. Privacy preserving misbehavior detection in IoV using federated machine learning. In Proceedings of the 2021 IEEE 18th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2021; pp. 1–6. [Google Scholar]
- Dollar, P.; Wojek, C.; Schiele, B.; Perona, P. Pedestrian detection: A benchmark. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 304–311. [Google Scholar] [CrossRef]
- Zhang, S.; Benenson, R.; Schiele, B. CityPersons: A Diverse Dataset for Pedestrian Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4457–4465. [Google Scholar] [CrossRef]
- Huang, X.; Cheng, X.; Geng, Q.; Cao, B.; Zhou, D.; Wang, P.; Lin, Y.; Yang, R. The ApolloScape Dataset for Autonomous Driving. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; pp. 1067–10676. [Google Scholar] [CrossRef]
- Yogamani, S.; Hughes, C.; Horgan, J.; Sistu, G.; Chennupati, S.; Uricar, M.; Milz, S.; Simon, M.; Amende, K.; Witt, C.; et al. WoodScape: A Multi-Task, Multi-Camera Fisheye Dataset for Autonomous Driving. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9307–9317. [Google Scholar] [CrossRef]
- Ertler, C.; Mislej, J.; Ollmann, T.; Porzi, L.; Neuhold, G.; Kuang, Y. The mapillary traffic sign dataset for detection and classification on a global scale. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 68–84. [Google Scholar]
- Zhang, J.; Zou, X.; Kuang, L.D.; Wang, J.; Sherratt, R.S.; Yu, X. CCTSDB 2021: A more comprehensive traffic sign detection benchmark. Hum.-Centric Comput. Inf. Sci. 2022, 12, 1–18. [Google Scholar]
- Arya, D.; Maeda, H.; Ghosh, S.K.; Toshniwal, D.; Mraz, A.; Kashiyama, T.; Sekimoto, Y. Transfer learning-based road damage detection for multiple countries. arXiv 2020, arXiv:2008.13101. [Google Scholar]
- Donovan, B.; Work, D. New York City Taxi Data (2010–2013); University of Illinois Urbana-Champaign: Champaign, IL, USA, 2014. [Google Scholar] [CrossRef]
- Research Core Team. Transportation Networks for Research. 2023. Available online: https://github.com/bstabler/TransportationNetworks (accessed on 10 April 2025).
- Zhang, S.; Guo, B.; Dong, A.; He, J.; Xu, Z.; Chen, S.X. Cautionary tales on air-quality improvement in Beijing. Proc. R. Soc. A Math. Phys. Eng. Sci. 2017, 473, 20170457. [Google Scholar] [CrossRef]
- Madrid Air Quality. 2019. Available online: https://www.kaggle.com/datasets/decide-soluciones/air-quality-madrid (accessed on 10 April 2025).
- Van Der Heijden, R.W.; Lukaseder, T.; Kargl, F. Veremi: A dataset for comparable evaluation of misbehavior detection in vanets. In Proceedings of the Security and Privacy in Communication Networks: 14th International Conference, SecureComm 2018, Singapore, 8–10 August 2018; Proceedings, Part I. pp. 318–337. [Google Scholar]
- Leal-Taixé, L.; Milan, A.; Schindler, K.; Cremers, D.; Reid, I.; Roth, S. Tracking the Trackers: An Analysis of the State of the Art in Multiple Object Tracking. Version Number: 1. arXiv 2017, arXiv:1704.02781. [Google Scholar]
- Neuhold, G.; Ollmann, T.; Rota Bulo, S.; Kontschieder, P. The mapillary vistas dataset for semantic understanding of street scenes. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 4990–4999. [Google Scholar]
- Bi, Q.; You, S.; Gevers, T. Interactive Learning of Intrinsic and Extrinsic Properties for All-Day Semantic Segmentation. IEEE Trans. Image Process. 2023, 32, 3821–3835. [Google Scholar] [CrossRef]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. nuscenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 11621–11631. [Google Scholar]
- Chang, M.F.; Lambert, J.; Sangkloy, P.; Singh, J.; Bak, S.; Hartnett, A.; Wang, D.; Carr, P.; Lucey, S.; Ramanan, D.; et al. Argoverse: 3d tracking and forecasting with rich maps. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 8748–8757. [Google Scholar]
- Wilson, B.; Qi, W.; Agarwal, T.; Lambert, J.; Singh, J.; Khandelwal, S.; Pan, B.; Kumar, R.; Hartnett, A.; Pontes, J.K.; et al. Argoverse 2: Next generation datasets for self-driving perception and forecasting. arXiv 2023, arXiv:2301.00493. [Google Scholar]
- Wang, H.; Li, T.; Li, Y.; Chen, L.; Sima, C.; Liu, Z.; Wang, B.; Jia, P.; Wang, Y.; Jiang, S.; et al. Openlane-v2: A topology reasoning benchmark for unified 3d hd mapping. Adv. Neural Inf. Process. Syst. 2023, 36, 18873–18884. [Google Scholar]
- Arya, D.; Maeda, H.; Ghosh, S.; Toshniwal, D.; Omata, H. Crowdsensing-based road damage detection challenge (crddc-2022). In Proceedings of the 2022 IEEE International Conference on Big Data (Big Data), Osaka, Japan, 17–20 December 2022. [Google Scholar]
- Haklay, M.; Weber, P. OpenStreetMap: User-Generated Street Maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- De Souza, A.M.; Yokoyama, R.S.; Maia, G.; Loureiro, A.; Villas, L. Real-time path planning to prevent traffic jam through an intelligent transportation system. In Proceedings of the 2016 IEEE Symposium on Computers and Communication (ISCC), Messina, Italy, 27–30 June 2016; pp. 726–731. [Google Scholar]
- Upadhyay, A.; Ayodele, J.O.; Kumar, A.; Garza-Reyes, J.A. A review of challenges and opportunities of blockchain adoption for operational excellence in the UK automotive industry. J. Glob. Oper. Strateg. Sourc. 2021, 14, 7–60. [Google Scholar] [CrossRef]
- Glenn, J.; Jing, Q. Ultralytics YOLO11. AGPL-3.0. 2024. Available online: https://github.com/ultralytics/ultralytics (accessed on 22 April 2025).
- Huang, L.; Duan, Q.; Liu, Y.; Wu, Y.; Li, Z.; Guo, Z.; Liu, M.; Lu, X.; Wang, P.; Liu, F.; et al. Artificial intelligence: A key fulcrum for addressing complex environmental health issues. Environ. Int. 2025, 198, 109389. [Google Scholar] [CrossRef]
- Nawaz, M.; Tang, J.K.T.; Bibi, K.; Xiao, S.; Ho, H.P.; Yuan, W. Robust cognitive capability in autonomous driving using sensor fusion techniques: A survey. IEEE Trans. Intell. Transp. Syst. 2023, 25, 3228–3243. [Google Scholar] [CrossRef]
- Ye, H.; Li, G.Y.; Juang, B.H.F. Deep Reinforcement Learning Based Resource Allocation for V2V Communications. IEEE Trans. Veh. Technol. 2019, 68, 3163–3173. [Google Scholar] [CrossRef]
- Ibrahum, A.D.M.; Hussain, M.; Hong, J.E. Deep learning adversarial attacks and defenses in autonomous vehicles: A systematic literature review from a safety perspective. Artif. Intell. Rev. 2025, 58, 1–53. [Google Scholar] [CrossRef]
- Singh, A.; Murzello, Y.; Pokhrel, S.; Samuel, S. An investigation of supervised machine learning models for predicting drivers’ ethical decisions in autonomous vehicles. Decis. Anal. J. 2025, 14, 100548. [Google Scholar] [CrossRef]
- Liu, D.; Zhu, Y.; Liu, Z.; Liu, Y.; Han, C.; Tian, J.; Li, R.; Yi, W. A survey of model compression techniques: Past, present, and future. Front. Robot. AI 2025, 12, 1518965. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Wang, F.; Li, Y. A lightweight network for traffic sign detection via multiple scale context awareness and semantic information guidance. Eng. Appl. Artif. Intell. 2024, 128, 107532. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, Y.; Zhou, B. NTS-YOLO: A Nocturnal Traffic Sign Detection Method Based on Improved YOLOv5. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 11245–11251. [Google Scholar] [CrossRef]
- Rahmani, S.; Baghbani, A.; Bouguila, N.; Patterson, Z. Graph neural networks for intelligent transportation systems: A survey. IEEE Trans. Intell. Transp. Syst. 2023, 24, 8846–8885. [Google Scholar] [CrossRef]
- Nag, D.; Brandel-Tanis, F.; Pramestri, Z.A.; Pitera, K.; Frøyen, Y.K. Exploring digital twins for transport planning: A review. Eur. Transp. Res. Rev. 2025, 17, 15. [Google Scholar] [CrossRef]
- Alfaro-Viquez, D.; Zamora-Hernandez, M.; Fernandez-Vega, M.; Garcia-Rodriguez, J.; Azorin-Lopez, J. A Comprehensive Review of AI-Based Digital Twin Applications in Manufacturing: Integration Across Operator, Product, and Process Dimensions. Electronics 2025, 14, 646. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, L.; Martinez, F.J. Inter-Urban Analysis of Pedestrian and Drivers through a Vehicular Network Based on Hybrid Communications Embedded in a Portable Car System and Advanced Image Processing Technologies. IEEE Trans. Intell. Transp. Syst. 2023, 24, 7892–7905. [Google Scholar]
- Kumar, S.; Patel, V.; Tanaka, H. Intelligent Traffic Monitoring through Heterogeneous and Autonomous Networks Dedicated to Traffic Automation. In Proceedings of the 2023 IEEE 97th Vehicular Technology Conference (VTC2023-Spring), Florence, Italy, 20–23 June 2023; pp. 1–6. [Google Scholar]
- Feng, Y.; Carballo, A.; Fujii, K.; Karlsson, R.; Ding, M.; Takeda, K. MulCPred: Learning Multi-Modal Concepts for Explainable Pedestrian Action Prediction. Sensors 2024, 24, 6742. [Google Scholar] [CrossRef]
- Njoku, J.N.; Nwakanma, C.I.; Lee, J.M.; Kim, D.S. Enhancing Security and Accountability in Autonomous Vehicles through Robust Speaker Identification and Blockchain-Based Event Recording. Electronics 2023, 12, 4998. [Google Scholar] [CrossRef]

| Work (Y) | Target | Key Aspect |
|---|---|---|
| [89] (2021) | LD | Recurrent feature shift |
| [94] (2023) | TLD | DINO |
| [101] (2023) | UO | Mask classification |
| [75] (2024) | TSD | YOLO |
| [83] (2024) | LD | Transformer |
| [91] (2024) | LD | Three-dimensional lane detection |
| Work (Y) | Goal/Target | Method | Metrics | Data |
|---|---|---|---|---|
| [115] (2021) | Review of techniques for APP | LR | RMSE, MAE, MAPE IFAW, and IFCP | Miscellaneous |
| [116] (2022) | Exploration of AQP factors | LR | RMSE, MAE, and MAPE | Miscellaneous |
| [117] (2024) | Real-time APP | Mass-balance model combined + ML | FAC2, MB, MGE RMSE, R, and IOA | On-road + air quality data |
| [118] (2022) | NO2 and SO2 prediction | LSTM + MVO | RMSE, MAE, and MAPE | AQ data |
| [119] (2021) | AQI prediction | SWM + LSTM GLCM + MFOA | RMSE and | AQ and meteorological data |
| [120] (2023) | NO2 prediction | A3T-GCN | RMSE, MAE, and R | AQ and meteorological and traffic data |
| [121] (2022) | PM2.5 prediction | Hybrid ML model | CC, PE, and NRMSE | UC Irvine ML Repository |
| [122] (2023) | PM2.5 prediction | BGGRU | RMSE, MSE, MAE, and | AQ data |
| [123] (2024) | AQI prediction | BO-HyTS | MSE, RMSE, Med AE Max Error, and MAE | IoT sensor data |
| [124] (2023) | AQI prediction | AirFormer | MAE and RMSE | AQ and meteorological data |
| [125] (2023) | PM2.5 prediction | STN | MAE, RMSE, and | Beijing and Taizhou data |
| Work (Y) | Goal/Target | Method | Metrics | Data |
|---|---|---|---|---|
| [127] (2020) | PCA | YOLO + U-Net | F1s, Prc, and Rec | Google Street View images |
| [128] (2024) | Real-time pavement C | EdgeFusionViT | Acc, Prc, Rec, and F1s | RSCD |
| [129] (2024) | DC winter road surface conditions | MMTransformer | Acc, M-Prc, M-Rec, and M-F1 | RGB images |
| [130] (2024) | Multi-type pavement distress SD | ISTD-DisNet | F1s and MIoU | ISTD-PDS7 dataset |
| [131] (2020) | Asphalt crack DQ | DeepLabv3+CNN | MIoU | RGB images |
| [132] (2020) | Defect DS | CNN | AP, FN, and FP | KolektorSDD |
| [133] (2024) | Real-time crack D | Deep CNN | Acc, Prc, Rec, and F1s | RGB images |
| [134] (2019) | Pavement distress D | CNN | Acc, Prc, Rec, and MCC | Orthoframes from mobile mapping system |
| [135] (2021) | PCA | PSD+LTI | MAE | Vehicle crowdsourced data |
| Work (Y) | Type | Goal | Key Aspect |
|---|---|---|---|
| [142] (2019) | AD | Platoon Attack | CNN and FCNN |
| [143] (2015) | AD | DDoS | Q-learning |
| [144] (2019) | AD | Black hole | ANN |
| [145] (2019) | AD | Sybil attack | LSTM |
| [146] (2020) | AD | Spoofing | LSTM |
| [147] (2019) | AD | Jamming | Deep Q-network |
| [148] (2020) | ID | New attacks | Transfer Learning on LSTM |
| [149] (2021) | ID | New attaks | Transfer Learning |
| [150] (2024) | AD | DDoS | LSTM and GRU |
| [151] (2024) | ID | Anomaly detection | Explainable AI |
| [152] (2025) | PP | Vehicle location | Federated learning |
| [153] (2023) | AN | Traffic control system attack | Coop-send falsified information |
| [154] (2023) | AN | Object detection | Objectness information |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Del-Coco, M.; Carcagnì, P.; Oliver, S.T.; Iskandaryan, D.; Leo, M. The Role of AI in Smart Mobility: A Comprehensive Survey. Electronics 2025, 14, 1801. https://doi.org/10.3390/electronics14091801
Del-Coco M, Carcagnì P, Oliver ST, Iskandaryan D, Leo M. The Role of AI in Smart Mobility: A Comprehensive Survey. Electronics. 2025; 14(9):1801. https://doi.org/10.3390/electronics14091801
Chicago/Turabian StyleDel-Coco, Marco, Pierluigi Carcagnì, Sergi Trilles Oliver, Ditsuhi Iskandaryan, and Marco Leo. 2025. "The Role of AI in Smart Mobility: A Comprehensive Survey" Electronics 14, no. 9: 1801. https://doi.org/10.3390/electronics14091801
APA StyleDel-Coco, M., Carcagnì, P., Oliver, S. T., Iskandaryan, D., & Leo, M. (2025). The Role of AI in Smart Mobility: A Comprehensive Survey. Electronics, 14(9), 1801. https://doi.org/10.3390/electronics14091801