
Modeling and Recognition of Latent False Data Injection Attacks on Distributed Cluster Control of Distribution Network

Abstract
1. Introduction
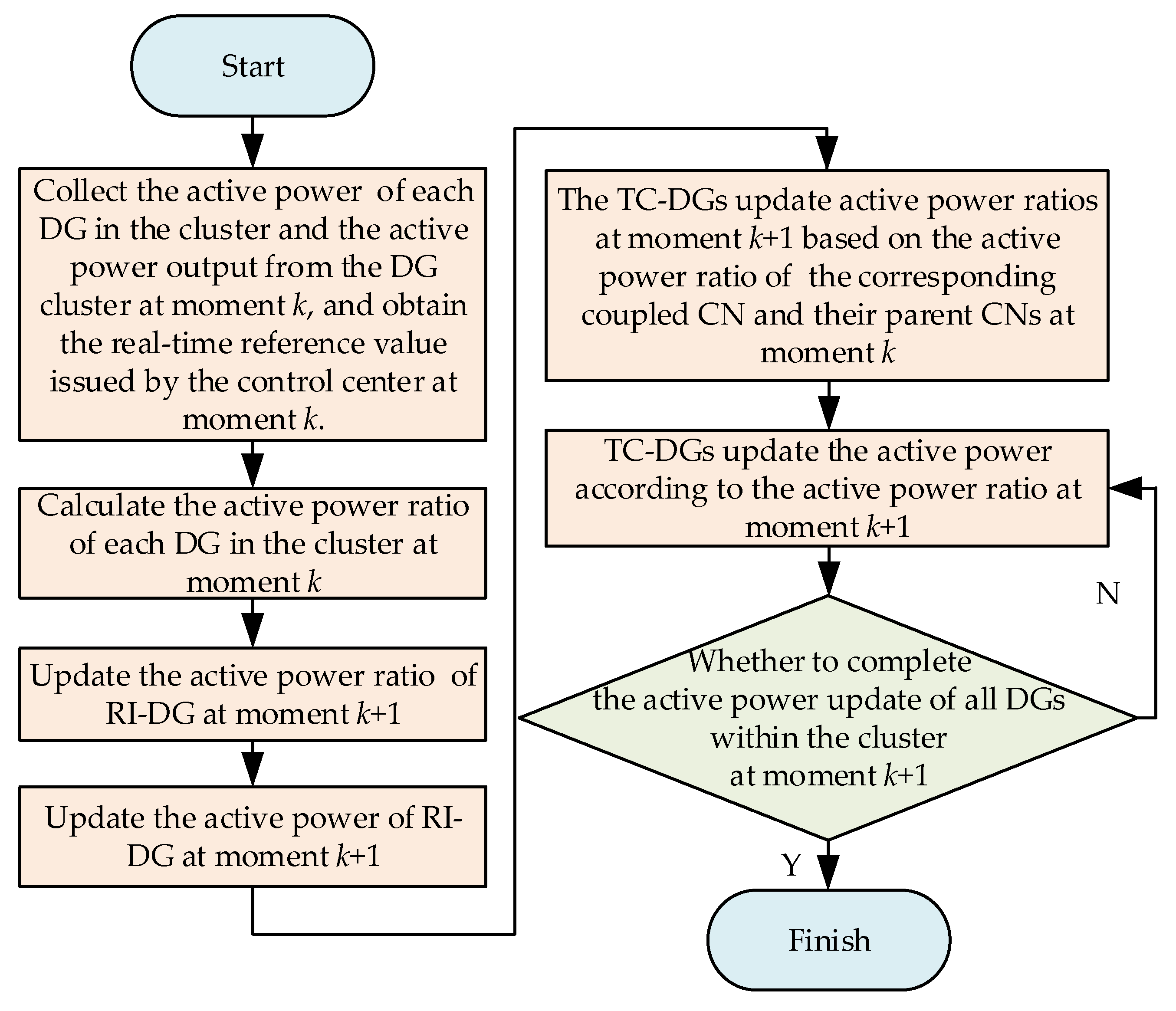
2. Cyber–Physical Interaction Characteristics in Distributed Cluster Control of Distribution Network
3. Latent False Data Injection Attack Modeling for Distributed Cluster Control of Distribution Network
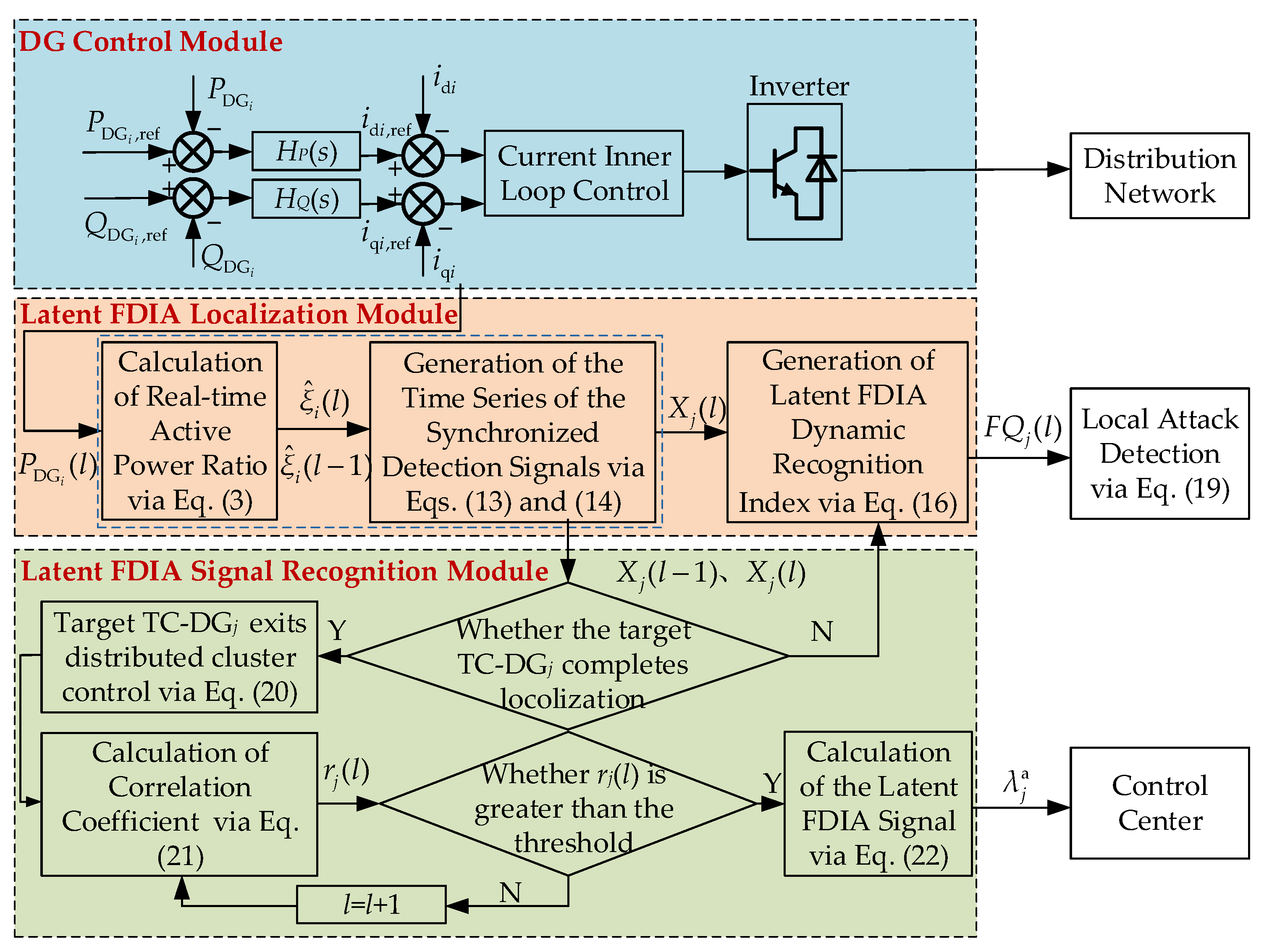
4. Latent False Data Injection Attack Recognition Method for Distributed Cluster Control of Distribution Network
4.1. Localization Methodology for Latent False Data Injection Attack
4.2. Recognition Method for Latent False Data Injection Attack Signal
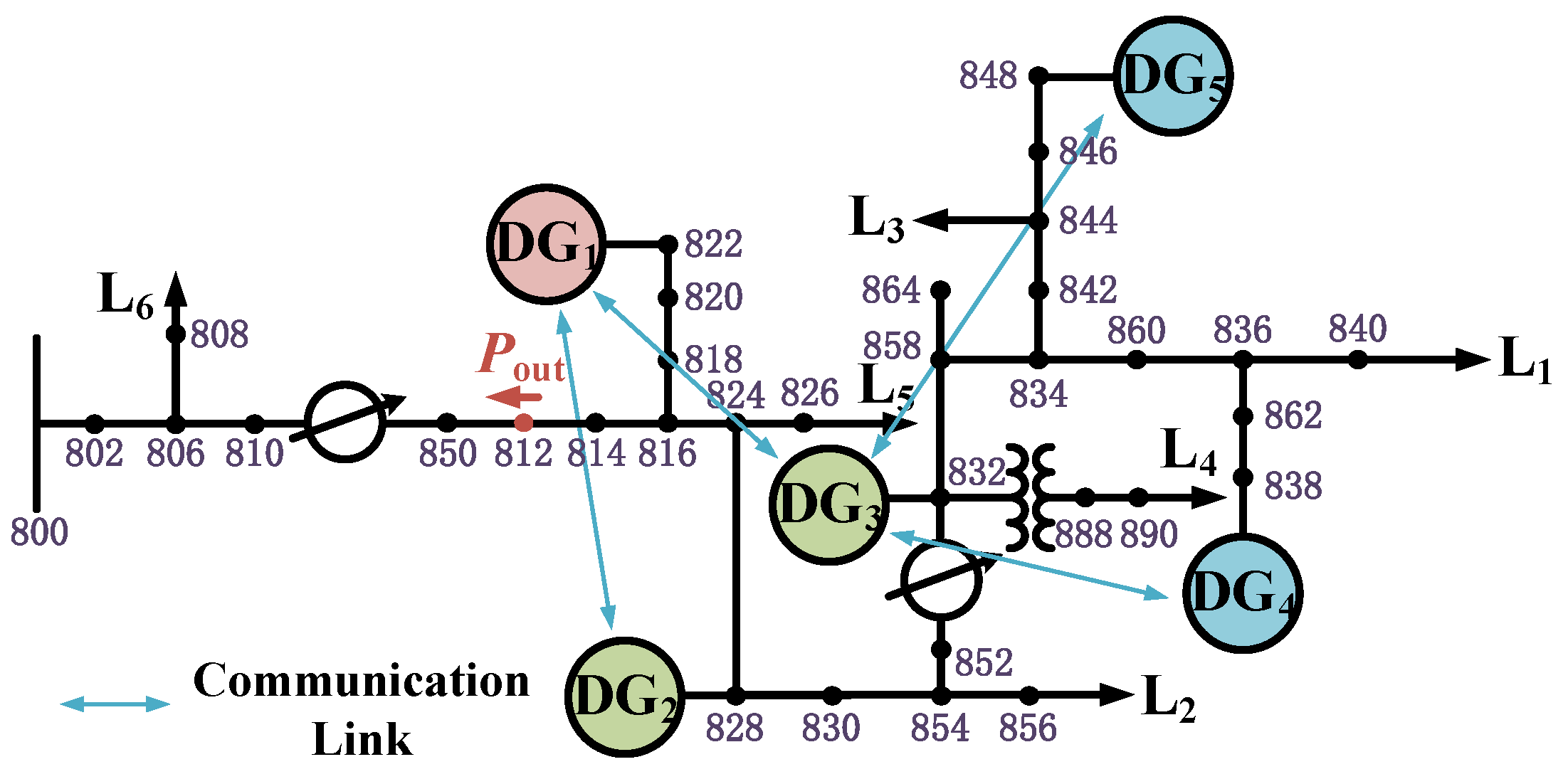
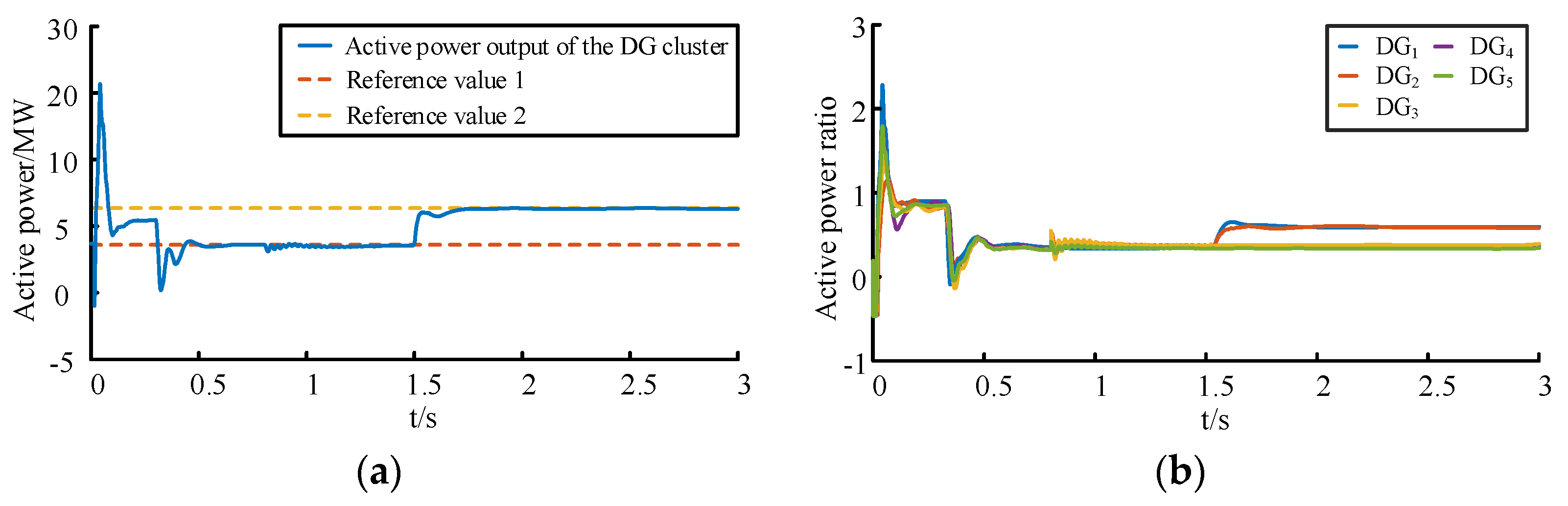
5. Case Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, C.; Li, J.; Zhang, Y.; Xu, Z. Optimal Location Planning of Renewable Distributed Generation Units in Distribution Networks: An Analytical Approach. IEEE Trans. Power Syst. 2018, 33, 2742–2753. [Google Scholar] [CrossRef]
- Ouyang, J.; Chen, J.; Yuan, Y.; Xu, S. Loop-closing voltage fluctuation suppression method of distribution network based on active control of distributed generators. Electr. Power Autom. Equip. 2024, 44, 49–56. [Google Scholar]
- Lin, D.; Liu, Q.; Zeng, G.; Wang, Z.; Yu, T. Refined Modeling and Evaluation of Reliability for Cyber-Physical System of Distribution Network. Autom. Electr. Power Syst. 2021, 45, 92–101. [Google Scholar]
- Zhu, B.; Guo, Y.; Guo, C.; Jiang, Z.; Zhang, X.; Yuan, X. A survey of the security assessment and security defense of a cyber physical power system under cyber failure threat. Power Syst. Prot. Control. 2021, 49, 178–187. [Google Scholar]
- Ouyang, J.; Yu, J.; Long, X.; Diao, Y.; Wang, J. Coordination Control Method to Block Cascading Failure of a Renewable Generation Power System Under Line Dynamic Security. Prot. Control. Mod. Power Syst. 2023, 8, 12. [Google Scholar] [CrossRef]
- Luo, A.; Xu, Q.; Ma, F.; Chen, Y. Overview of power quality analysis and control technology for the smart grid. J. Mod. Power Syst. Clean Energy 2016, 4, 1–9. [Google Scholar] [CrossRef]
- Wei, S.; Xu, J.; Wu, Z.; Cheng, Y.; Hu, M. False Data Injection Attack Method Against State Estimation of Three-phase Unbalanced Distribution Network. High Volt. Eng. 2021, 47, 2367–2376. [Google Scholar]
- Nguyen, D.; Shen, Y.; Thai, M. Detecting Critical Nodes in Interdependent Power Networks for Vulnerability Assessment. IEEE Trans. Smart Grid 2013, 4, 151–159. [Google Scholar] [CrossRef]
- Liu, N.; Zhang, J.; Zhang, H.; Liu, W. Security Assessment for Communication Networks of Power Control Systems Using Attack Graph and MCDM. IEEE Trans. Power Deliv. 2010, 25, 1492–1500. [Google Scholar] [CrossRef]
- Li, P.; Cao, Y.; Xin, H.; Dai, P. Discussion on cooperative control architecture of cyber-physical distribution network system. Electr. Power Autom. Equip. 2017, 37, 2–7+5. [Google Scholar]
- Xin, H.; Lu, Z.; Liu, Y.; Gan, D. A Center-Free Control Strategy for the Coordination of Multiple Photovoltaic Generators. IEEE Trans. Smart Grid 2014, 5, 1262–1269. [Google Scholar] [CrossRef]
- Kim, T.; Sugie, T. Cooperative control for target-capturing task based on a cyclic pursuit strategy. Automatica 2007, 43, 1426–1431. [Google Scholar] [CrossRef]
- Li, J.; Xu, S.; Chu, Y.; Wang, H. Distributed average consensus control in networks of agents using outdated states. Iet Control. Theory Appl. 2010, 4, 746–758. [Google Scholar] [CrossRef]
- Zhang, Y.; Ni, M.; Sun, Y.; Li, M. Quantitative Risk Assessment of Cyber-Physical System for Cyber attacks in Distribution Network. Autom. Electr. Power Syst. 2019, 43, 12–22+33. [Google Scholar]
- Yang, T.; Xu, Z.; Zhao, Y.; Zhai, F. Review on Research of Attack and Defense Methods for Digitalized New Power System. Autom. Electr. Power Syst. 2024, 48, 112–126. [Google Scholar]
- Wang, Q.; Li, M.; Tang, Y.; Ni, M. A Review on Research of Cyber attacks and Defense in Cyber Physical Power Systems Part One Modelling and Evaluation. Autom. Electr. Power Syst. 2019, 43, 9–21. [Google Scholar]
- Sahoo, S.; Mishra, S.; Peng, C.; Dragicevic, T. A stealth cyber attack detection strategy for DC microgrids. IEEE Trans. Power Electron. 2019, 34, 8162–8174. [Google Scholar] [CrossRef]
- Mohammadhassani, A.; Teymouri, A.; Mehrizi-Sani, A.; Tehrani, K. Performance Evaluation of an Inverter-Based Microgrid Under Cyberattack. In Proceedings of the 2020 IEEE 15th International Conference of System of Systems Engineering (SoSE), Budapest, Hungary, 2–4 June 2020; pp. 211–216. [Google Scholar]
- Diaba, Y.; Khah, S.; Elmusrati, M. Cyber-physical attack and the future energy systems: A review. Energy Rep. 2024, 12, 2914–2932. [Google Scholar] [CrossRef]
- Li, P.; Liu, Y.; Xin, H.; Qi, D. Vulnerability Assessment for Cyber Physical System of Distribution Network in Distributed Cooperative Control Mode. Autom. Electr. Power Syst. 2018, 42, 22–29+59. [Google Scholar]
- Yang, Y.; Liu, W.; Li, C.; Liu, G.; Zhang, S.; Zhang, Y. Review of FDIA Detection Methods for Electric Power SCADA System. Proc. CSEE 2023, 43, 8602–8622. [Google Scholar]
- Xi, L.; Dong, L.; Cheng, C.; Tian, X.; Li, Z. Location detection of a false data injection attack in a cyber-physical power system based on a hybrid chimp optimized extreme learning machine. Power Syst. Prot. Control. 2024, 52, 46–58. [Google Scholar]
- Su, S.; Wu, C.; Ma, J.; Zeng, X. Attacker’s Perspective Based Analysis on Cyber Attack Mode to Cyber-Physical System. Power Syst. Technol. 2014, 38, 3115–3120. [Google Scholar]
- Wang, D.; Huang, L.; Liu, J.; Lü, L.; Ruan, Z.; Lü, L. Cyber-physical system defense strategy considering loaded false data injection attacks. Power Syst. Prot. Control. 2019, 47, 28–34. [Google Scholar]
- Yang, J.; Guo, Y.; Guo, C.; Chen, Z.; Wang, S. A review of dynamic security protection on a cyber physical power system considering model and data driving. Power Syst. Prot. Control. 2022, 50, 176–187. [Google Scholar]
- Wu, W.; Zhang, B.; Sun, H.; Wang, B.; Yang, Y.; Liu, H.; Lin, C.; Wang, S. Energy Management and Distributed Energy Resources Cluster Control for Active Distribution Networks. Autom. Electr. Power Syst. 2020, 44, 111–118. [Google Scholar]
- Bidram, A.; Davoudi, A.; Lewis, F.; Guerrero, J. Distributed Cooperative Secondary Control of Microgrids Using Feedback Linearization. IEEE Trans. Power Syst. A Publ. Power Eng. Soc. 2013, 28, 3462–3470. [Google Scholar] [CrossRef]
- Shafiee, Q.; Guerrero, J.; Vasquez, J. Distributed Secondary Control for Islanded Microgrids—A Novel Approach. IEEE Trans. Power Electron. 2014, 29, 1018–1031. [Google Scholar] [CrossRef]
- Kokiopoulou, E.; Frossard, P. Polynomial filtering for fast convergence in distributed consensus. IEEE Trans. Signal Process. 2016, 7, 342–354. [Google Scholar] [CrossRef]
- Xu, Q.; Jiang, W.; Blaabjerg, F.; Zhang, C.; Zhang, X.; Ferando, T. Backstepping Control for Large Signal Stability of High Boost Ratio Interleaved Converter Interfaced DC Microgrids With Constant Power Loads. IEEE Trans. Power Electron. 2020, 35, 5397–5407. [Google Scholar] [CrossRef]
- Hu, Z.; Su, R.; Veerasamy, V.; Huang, L.; Ma, R. Resilient Frequency Regulation for Microgrids Under Phasor Measurement Unit Faults and Communication Intermittency. IEEE Trans. Ind. Inform. 2025, 21, 1941–1949. [Google Scholar] [CrossRef]
- Li, T.; Su, S.; Yang, H.; Wen, F.; Wang, D.; Zhu, L. Attacks and Cyber Security Defense in Cyber-physical Power System. Autom. Electr. Power Syst. 2017, 41, 162–167. [Google Scholar]
- Guo, S.; Zhao, Z.; Zhang, Q. Failure rate model for optical fiber cable in electric power communication network based on Weibull distribution function. Power Syst. Prot. Control. 2017, 45, 92–99. [Google Scholar]
- Li, P.; Gu, W.; Wang, L.; Xu, B.; Wu, M. Dynamic equivalent modeling of two-staged photovoltaic power station clusters based on dynamic affinity propagation clustering algorithm. Int. J. Electr. Power Energy Syst. 2018, 95, 463–475. [Google Scholar] [CrossRef]
- Wang, Q.; Tai, W.; Tang, Y.; Ni, M. A Review on False Data Injection Attack Toward Cyber-physical Power System. Acta Autom. Sin. 2019, 45, 72–83. [Google Scholar]
- Ruan, Z.; Lu, L.; Liu, Y.; Liu, J.; Wang, D.; Huang, L. Coordinated attack model of cyber-physical power system considering false load data injection. Electr. Power Autom. Equip. 2019, 39, 181–187. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| l | r3 (l) | l | r3 (l) |
|---|---|---|---|
| 1 | 0.7071 | 7 | 0.9354 |
| 2 | 0.8165 | 8 | 0.9428 |
| 3 | 0.8660 | 9 | 0.9487 |
| 4 | 0.8944 | 10 | 0.9896 |
| 5 | 0.9129 | 11 | 0.9901 |
| 6 | 0.9258 | 12 | 0.9911 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, J.; Chen, Y.; Diao, Y.; Huang, F. Modeling and Recognition of Latent False Data Injection Attacks on Distributed Cluster Control of Distribution Network. Electronics 2025, 14, 1761. https://doi.org/10.3390/electronics14091761
Ouyang J, Chen Y, Diao Y, Huang F. Modeling and Recognition of Latent False Data Injection Attacks on Distributed Cluster Control of Distribution Network. Electronics. 2025; 14(9):1761. https://doi.org/10.3390/electronics14091761
Chicago/Turabian StyleOuyang, Jinxin, Yujie Chen, Yanbo Diao, and Fei Huang. 2025. "Modeling and Recognition of Latent False Data Injection Attacks on Distributed Cluster Control of Distribution Network" Electronics 14, no. 9: 1761. https://doi.org/10.3390/electronics14091761
APA StyleOuyang, J., Chen, Y., Diao, Y., & Huang, F. (2025). Modeling and Recognition of Latent False Data Injection Attacks on Distributed Cluster Control of Distribution Network. Electronics, 14(9), 1761. https://doi.org/10.3390/electronics14091761