


Design of an Experimental Test Rig for Shrouded and Open Rotors for Small Rotary Wing Unmanned Aerial System


Abstract
1. Introduction
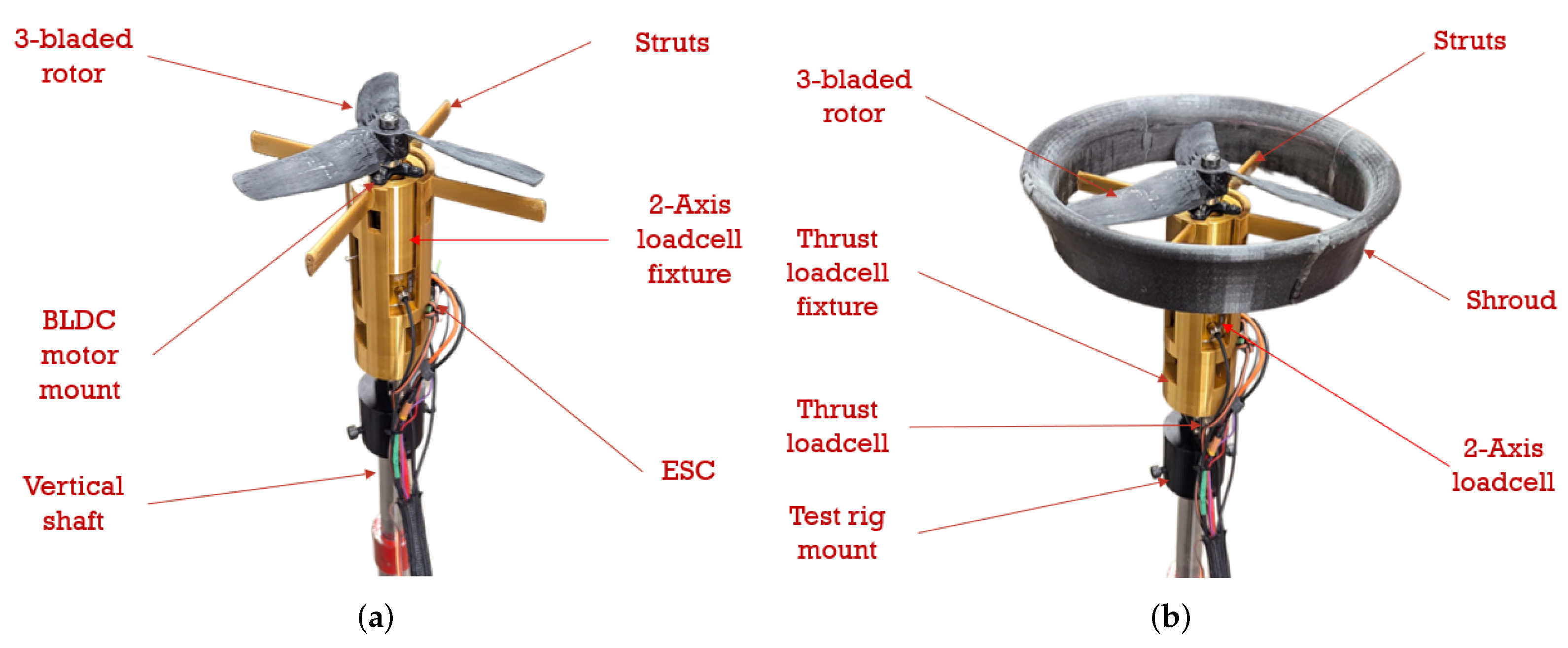
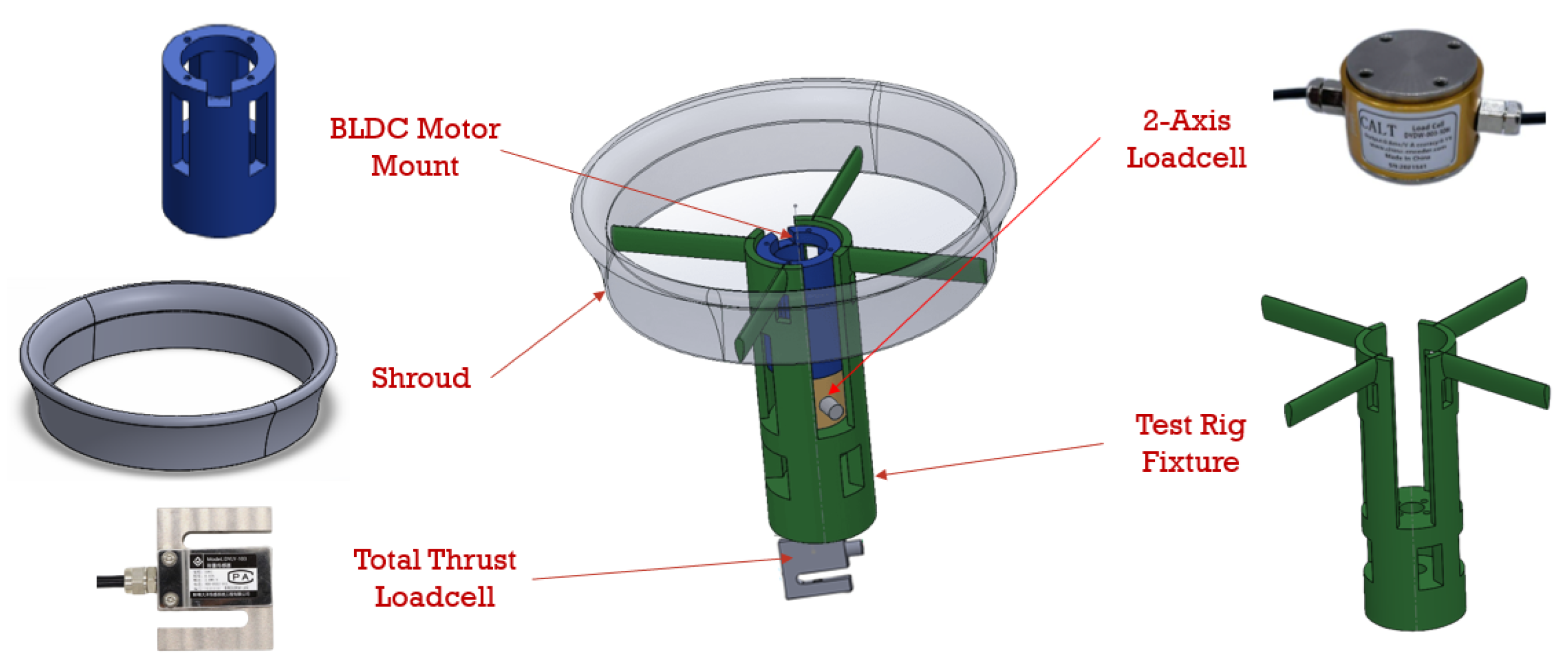
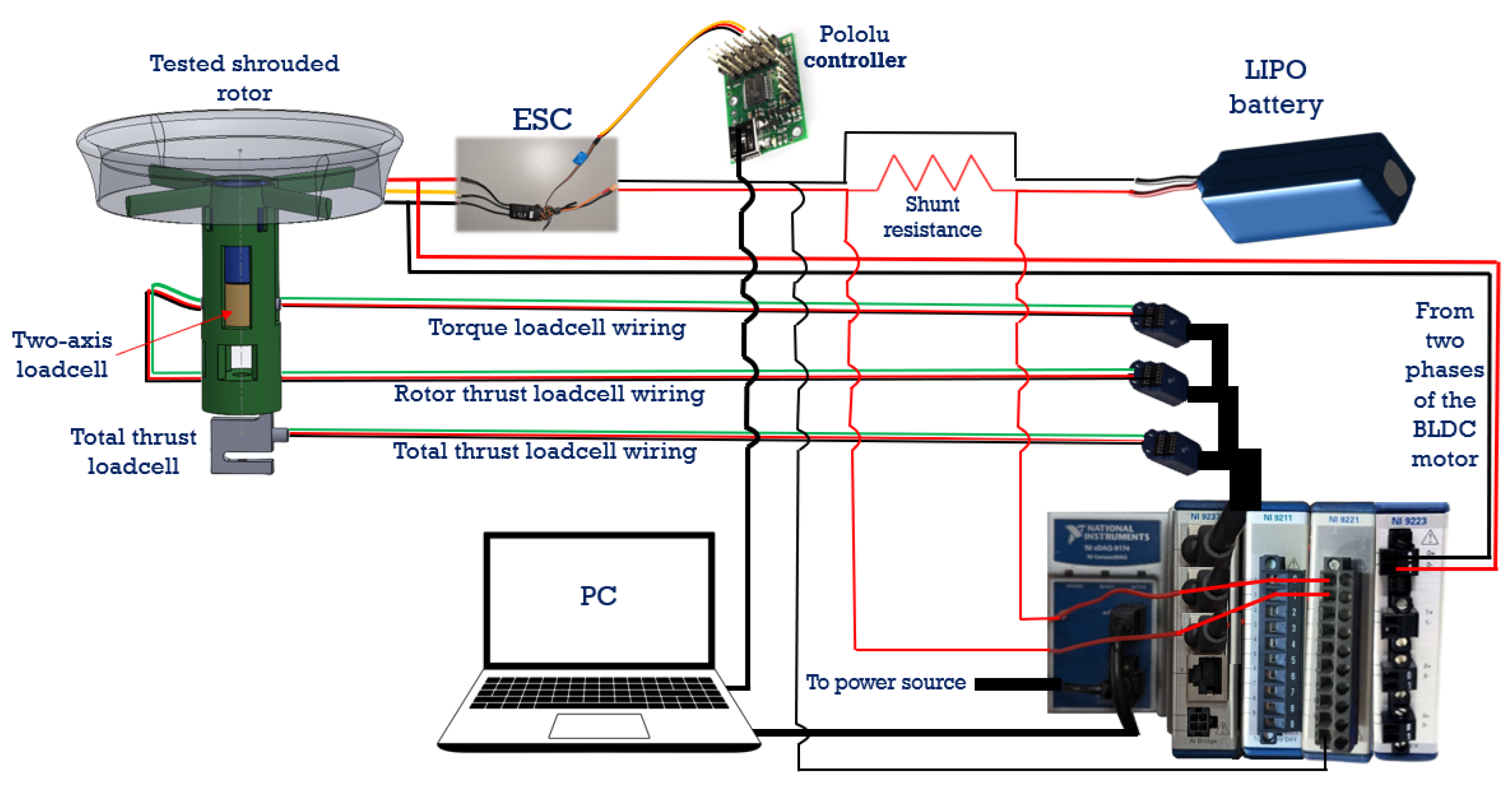
2. Experimental Setup
2.1. Test Rig Design
2.2. Thrust and Torque Calibration
2.3. Uncertainty Analysis
2.3.1. Random (Precision) Error
2.3.2. Systematic (Bias) Error
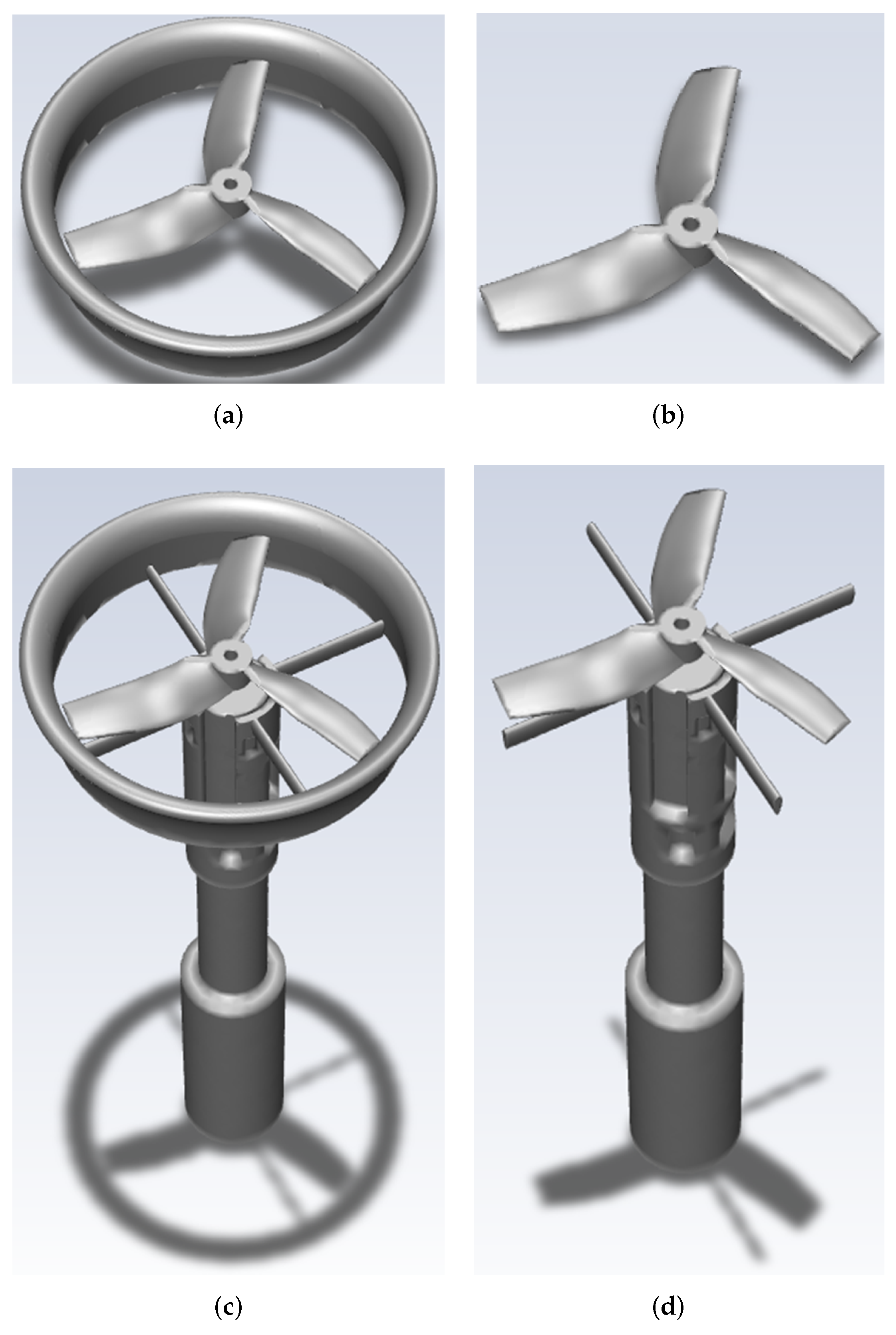
3. Studied Rotors
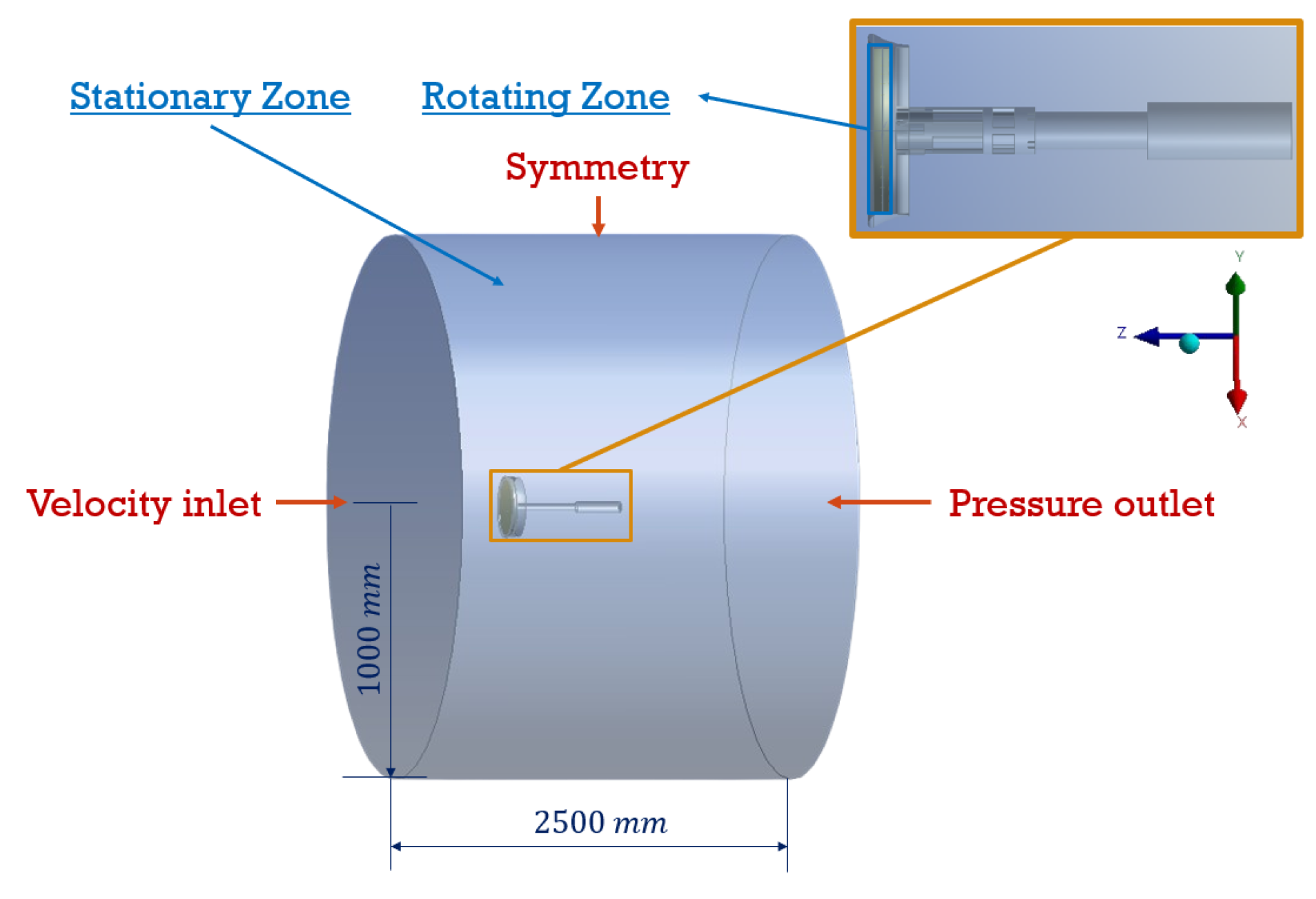
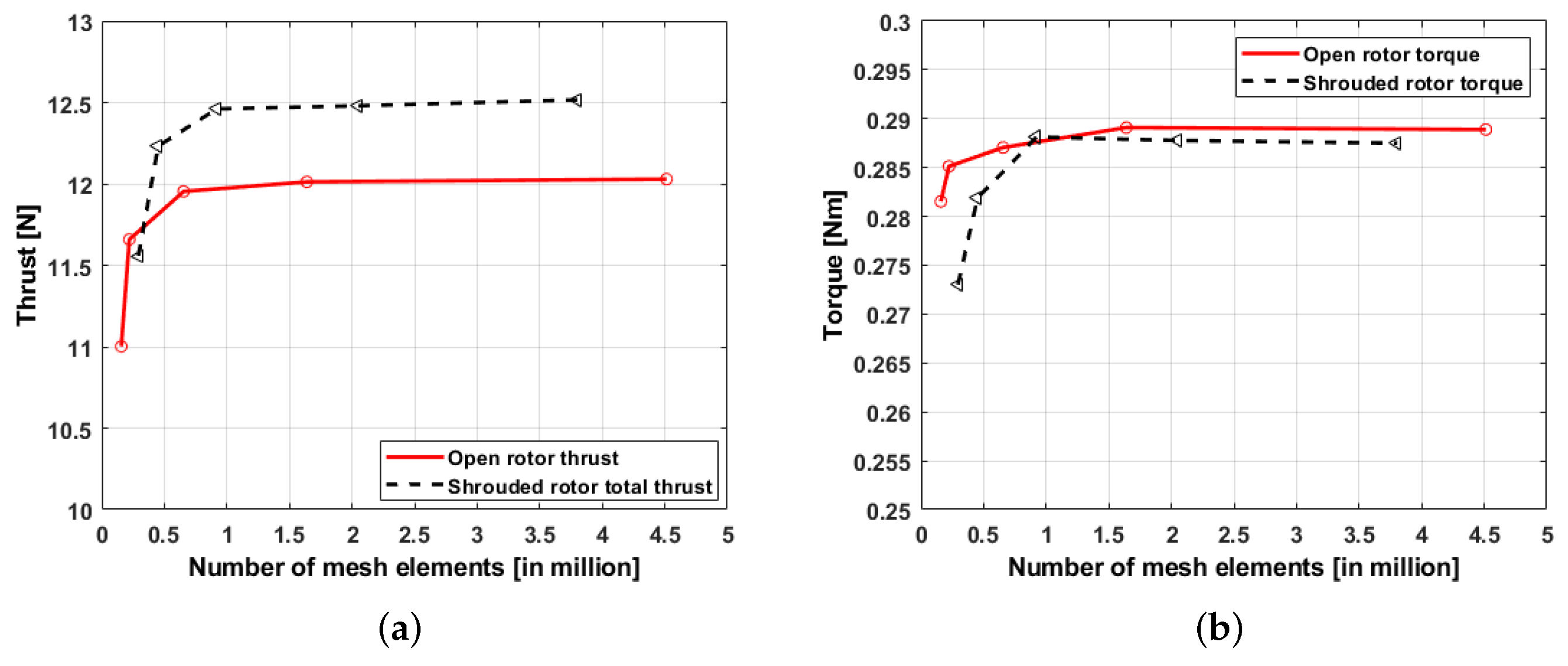
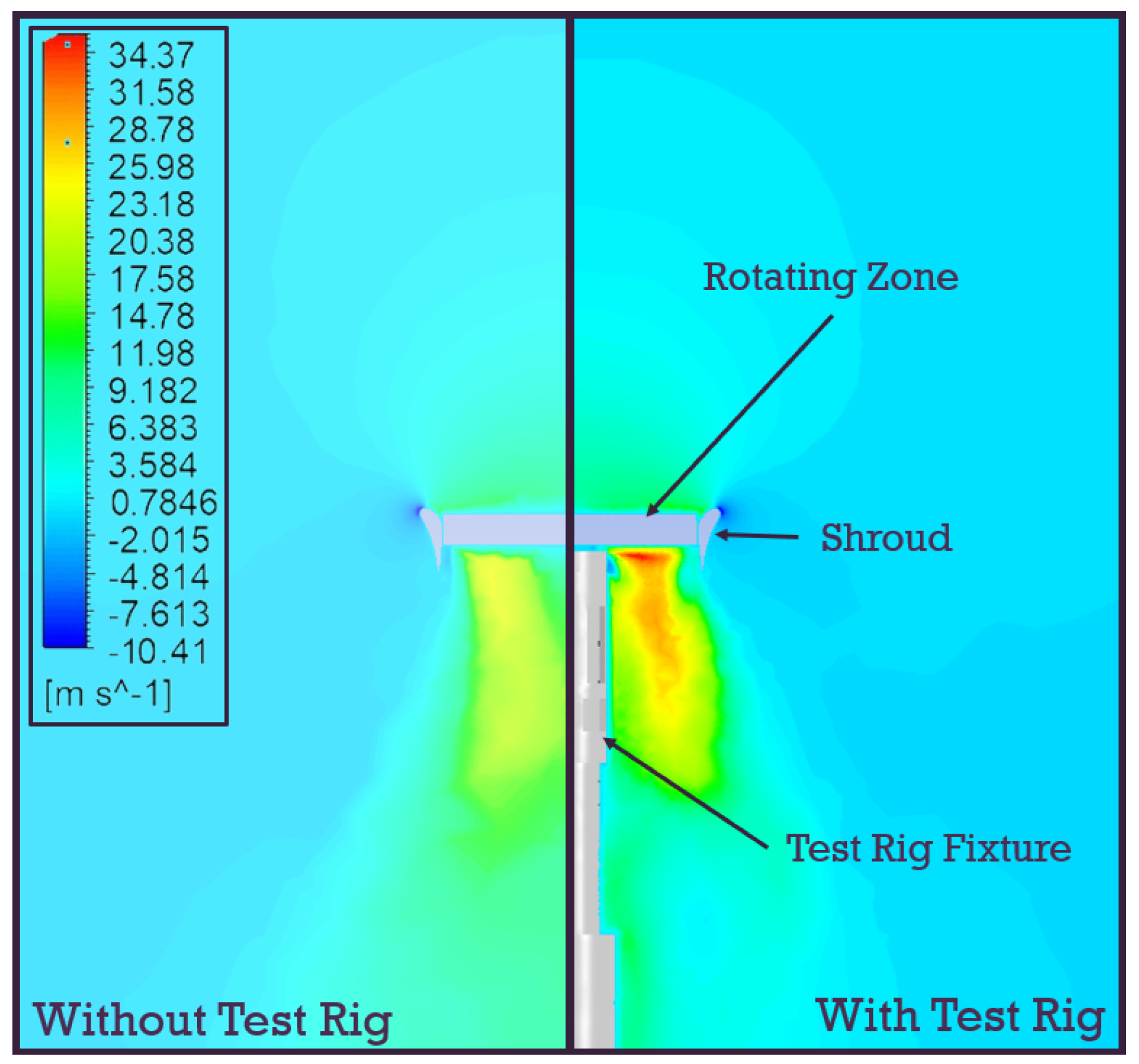
4. Computational Model
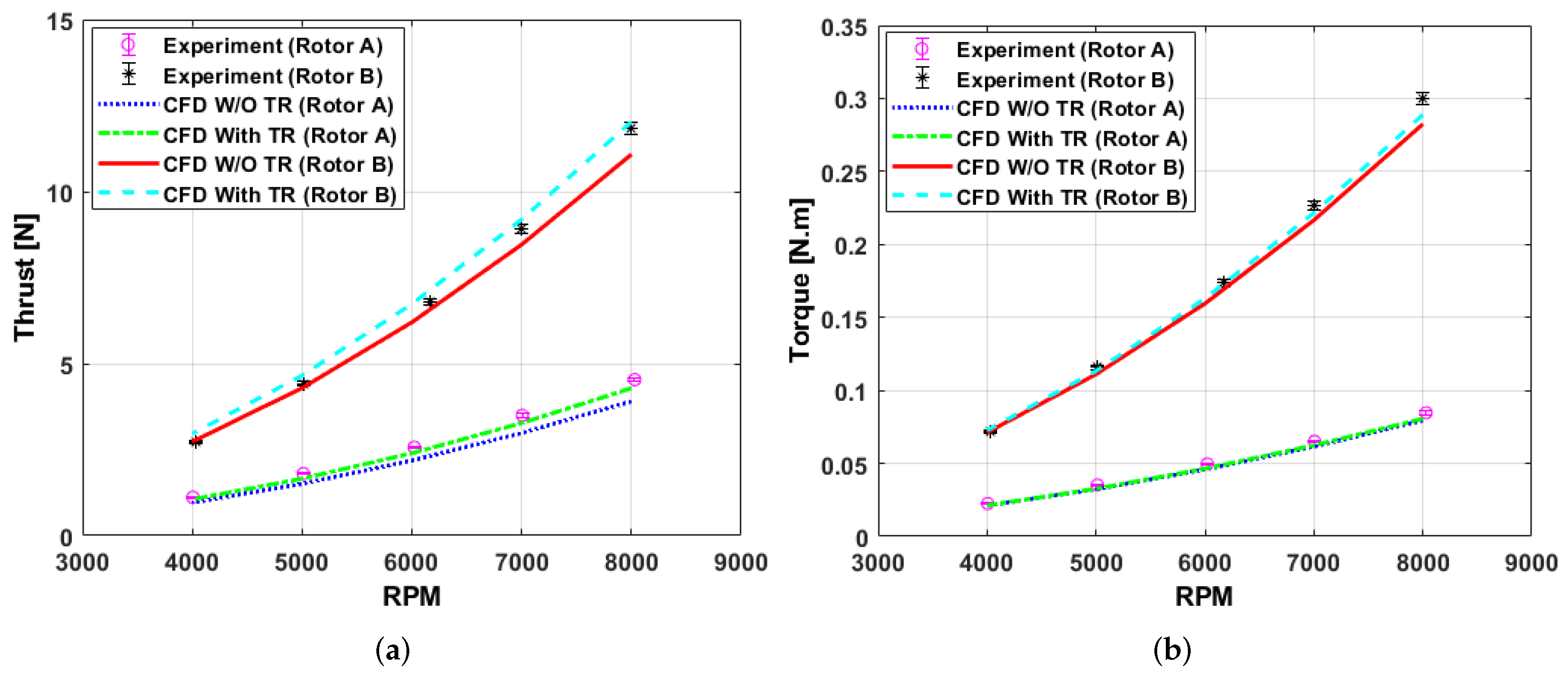
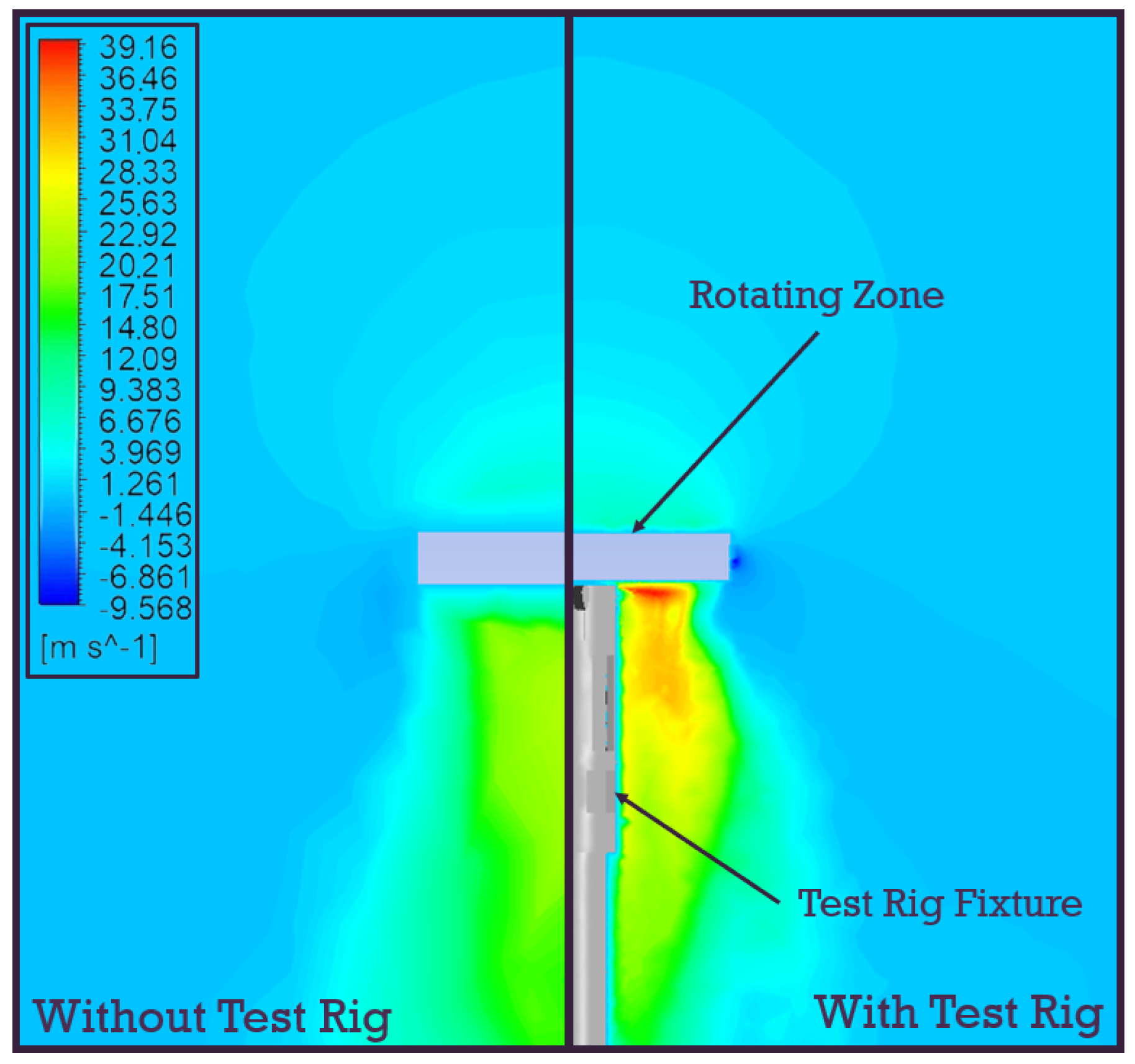
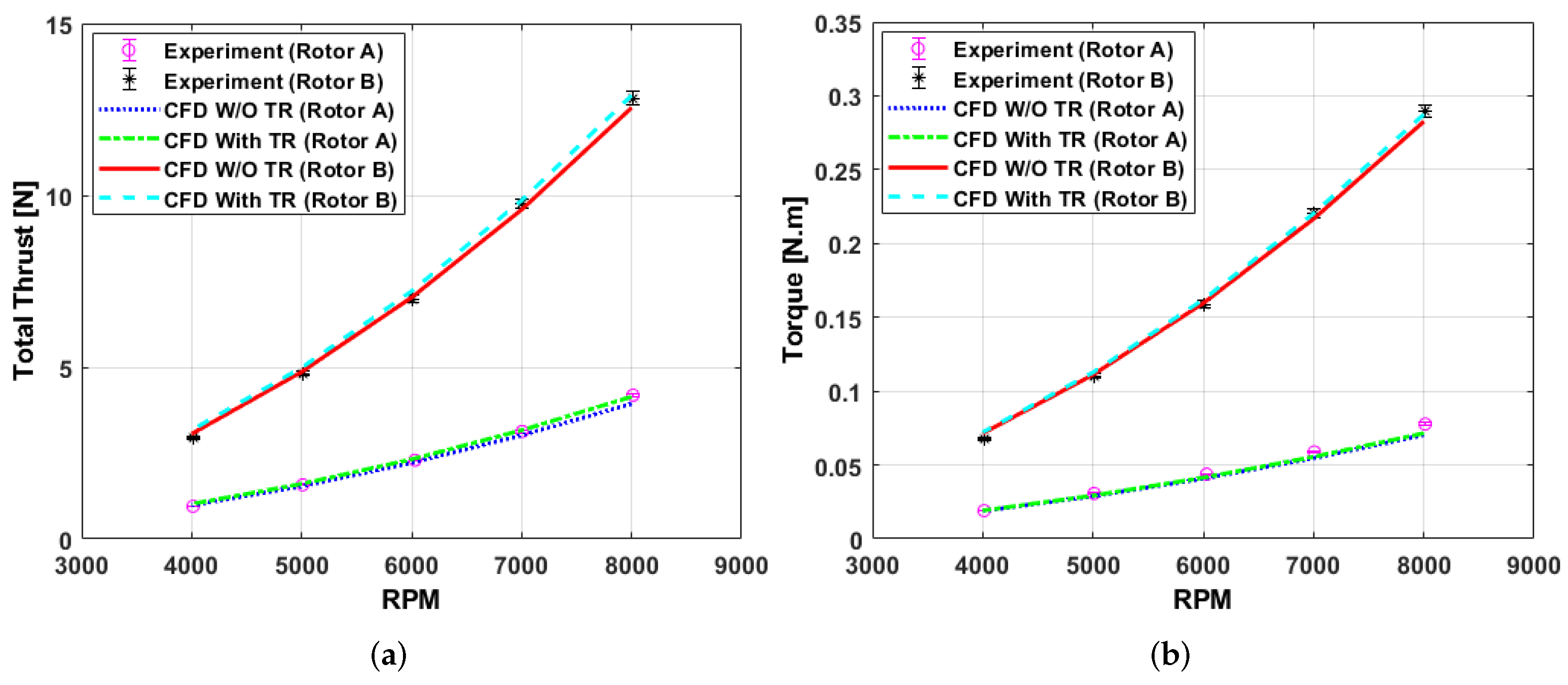
5. Results and Discussion
5.1. Open Rotor
5.2. Shrouded Rotor
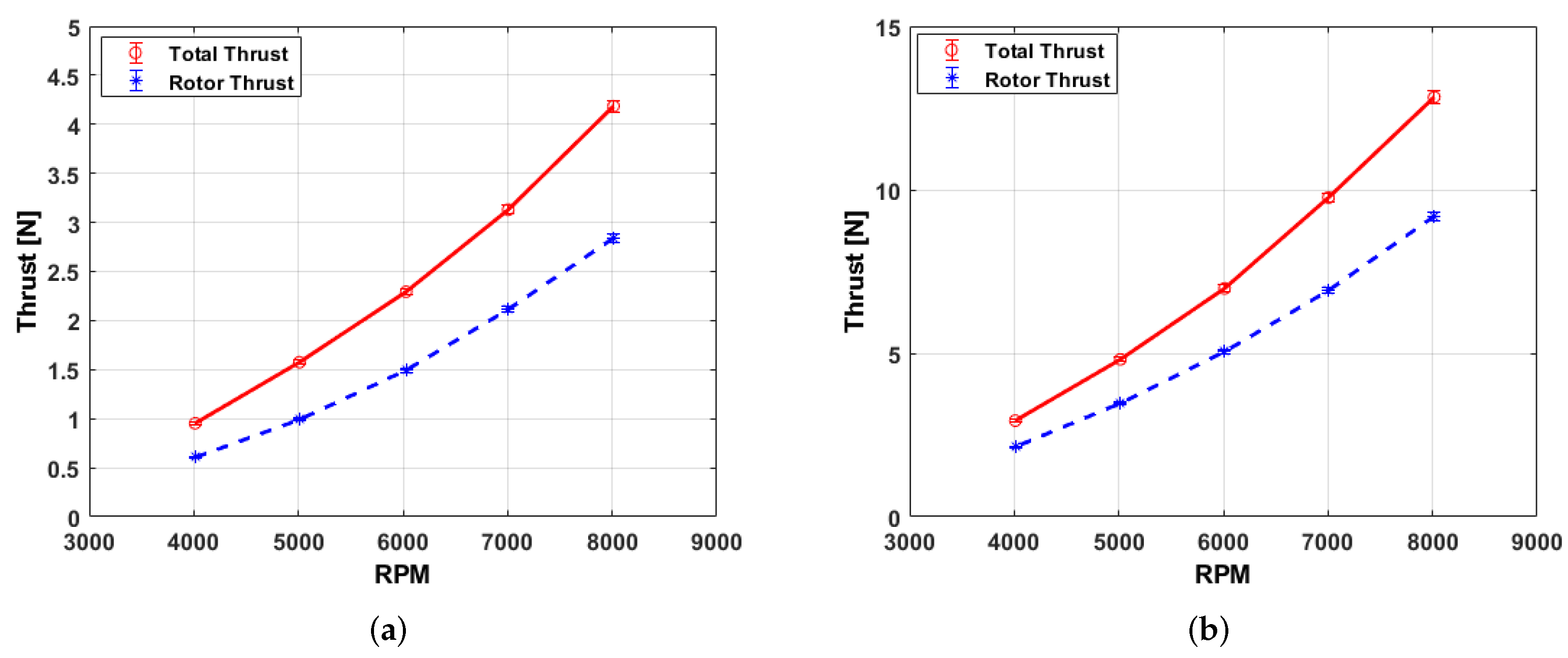
5.3. Total and Rotor Thrust for Shrouded Rotor Configuration
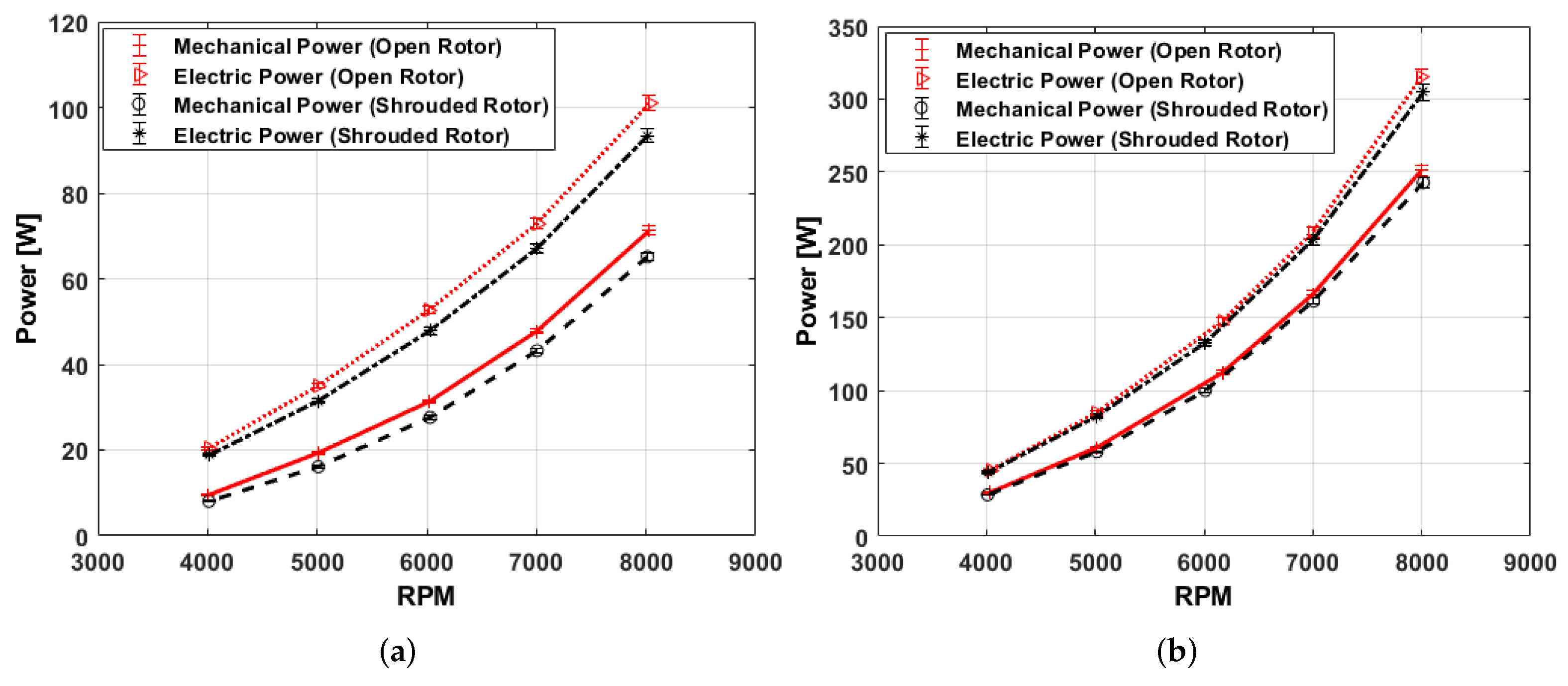
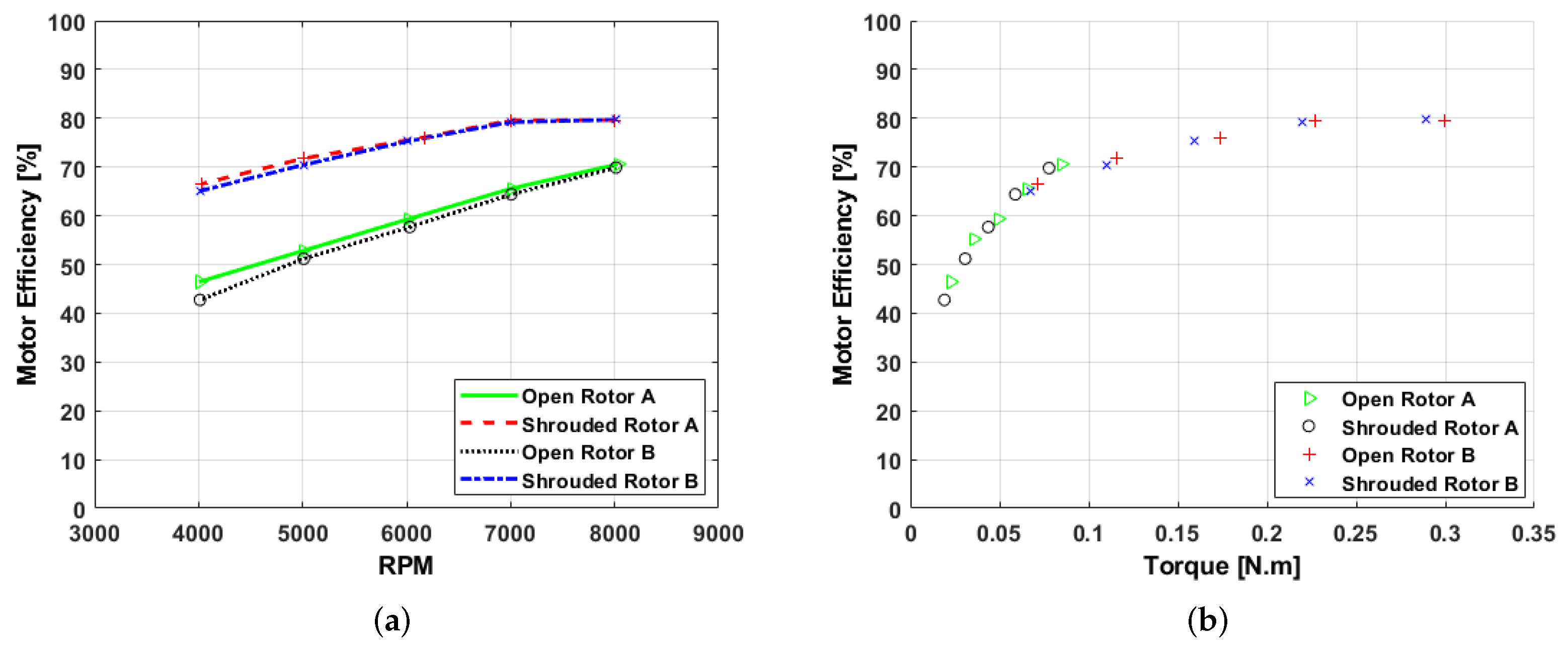
5.4. Aerodynamic and BLDC Motor Efficiencies
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RPM | Total Thrust | Rotor Thrust | Torque |
|---|---|---|---|
| 0.467 | 1.079 | 1.54 | 0.873 |
| 0.167 | 0.706 | 0.548 | 1.36 |
| 0.439 | 1.28 | 1.35 | 1.053 |
| 0.252 | 0.877 | 0.360 | 0.198 |
| 0.177 | 0.384 | 0.623 | 0.363 |
References
- Leishman, G.J. Principles of Helicopter Aerodynamics with CD Extra; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Ruggiero, F.; Lippiello, V.; Ollero, A. Aerial manipulation: A literature review. IEEE Robot. Autom. Lett. 2018, 3, 1957–1964. [Google Scholar] [CrossRef]
- Ibrahim, N.A.; Zakaria, M.Y.; Kamal, A.M. Simulation of tilt-rotor UAV flight dynamics in horizontal flight. In Proceedings of the International Conference on Aerospace Sciences and Aviation Technology, The Military Technical College, Cairo, Egypt, 9–11 May 2023; Volume 20, pp. 1–14. [Google Scholar]
- Johnson, B.; Lind, R. High angle-of-attack flight dynamics of small UAVs. In Proceedings of the 47th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009; p. 61. [Google Scholar]
- Ning, Z. Experimental Investigations on the Aerodynamic and Aeroacoustic Characteristics of Small UAS Propellers. Ph.D. Thesis, Iowa State University, Ames, IA, USA, 2018. [Google Scholar]
- Ma, T.; Wang, X.; Qiao, N.; Zhang, Z.; Fu, J.; Bao, M. A Conceptual Design and Optimization Approach for Distributed Electric Propulsion eVTOL Aircraft Based on Ducted-Fan Wing Unit. Aerospace 2022, 9, 690. [Google Scholar] [CrossRef]
- Graf, W.; Fleming, J.; Ng, W. Improving ducted fan UAV aerodynamics in forward flight. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008; p. 430. [Google Scholar]
- Seddon, J.M.; Newman, S. Basic Helicopter Aerodynamics; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 35. [Google Scholar]
- Davis, D. Ducted Propulsors-Progress in the United Kingdom; Technical Report, SAE Technical Paper; SAE: Pittsburgh, PA, USA, 1975. [Google Scholar]
- Chang, I.C.; Rajagopalan, R. CFD analysis for ducted fans with validation. In Proceedings of the 21st AIAA Applied Aerodynamics Conference, Big Sky, MT, USA, 8–15 March 2003; p. 4079. [Google Scholar]
- Goodson, K.W.; Grunwald, K.J. Aerodynamic Characteristics of a Powered Semispan Tilting-Shrouded-Propeller VTOL Model in Hovering and Transition Flight; National Aeronautics and Space Administration: Washington, DC, USA, 1962; Volume 981.
- Mort, K.W.; Yaggy, P.F. Aerodynamic Characteristics of a 4-Foot-Diameter Ducted Fan Mounted on the Tip of a Semispan Wing; National Aeronautics and Space Administration: Washington, DC, USA, 1962; Volume 1301.
- Newsom, W.A. Aerodynamic Characteristics of Four-Duct Tandem VTOL-Aircraft Configurations; National Aeronautics and Space Administration: Washington, DC, USA, 1963.
- Spreemann, K.P. Wind Tunnel Investigation of Longitudinal Aerodynamic Characteristics of a Powered Four-Duct-Propeller VTOL Model in Transition; Technical Report; National Aeronautics and Space Administration: Washington, DC, USA, 1966.
- Ai, T.; Fan, W.; Xu, B.; Xiang, C.; Zhang, Y.; Zhao, Z. Aerodynamic analysis and modeling of coaxial ducted fan aircraft with the ceiling effect. Eng. Appl. Comput. Fluid Mech. 2021, 15, 1563–1584. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z.; Jia, H. Experimental Investigation on Hover Performance of a Ducted Coaxial-Rotor UAV. Sensors 2023, 23, 6413. [Google Scholar] [CrossRef] [PubMed]
- Graf, W.E. Effects of Duct Lip Shaping and Various Control Devices on the Hover and Forward Flight Performance of Ducted Fan UAVs. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2005. [Google Scholar]
- Myers, L.M. Aerodynamic Experiments on a Ducted Fan in Hover and Edgewise Flight. Master’s Thesis, The Pennsylvania State University, University Park, PA, USA, 2009. [Google Scholar]
- Cho, L.; Lee, S.; Cho, J. Numerical and experimental analyses of the ducted fan for the small VTOL UAV propulsion. Trans. Jpn. Soc. Aeronaut. Space Sci. 2013, 56, 328–336. [Google Scholar] [CrossRef]
- Akturk, A.; Camci, C. Tip clearance investigation of a ducted fan used in VTOL unmanned aerial vehicles—Part I: Baseline experiments and computational validation. J. Turbomach. 2014, 136, 021004. [Google Scholar] [CrossRef]
- Han, H.; Xiang, C.; Xu, B.; Yu, Y. Experimental and computational analysis of microscale shrouded coaxial rotor in hover. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1092–1100. [Google Scholar]
- Wang, J.; Chen, R.; Lu, J. Experimental and numerical studies on the effect of airflow separation suppression on aerodynamic performance of a ducted coaxial propeller in hovering. Aerospace 2022, 10, 11. [Google Scholar] [CrossRef]
- Dayhoum, A.; Ramirez-Serrano, A.; Martinuzzi, R.J. Analytical Modeling of Shrouded Rotors in Hover with Experimental and Computational Validation. Actuators 2025, 14, 138. [Google Scholar] [CrossRef]
- Dayhoum, A.; Ramirez-Serrano, A.; Martinuzzi, R. Aerodynamic Optimization and Experimental Analysis of Shrouded Rotor Blades. In Proceedings of the Vertical Flight Society’s 80th Annual Forum & Technology Display (VFS 2024), Montreal, QC, Canada, 7–9 May 2024. [Google Scholar]
- Dayhoum, A.; Ramirez-Serrano, A.; Martinuzzi, R. Aerodynamic Investigation of Shrouded Rotors with Dual Exit Channels. Int. J. Mech. Eng. Robot. Res. (IJMERR) 2024, 13, 470–476. [Google Scholar]
- Dayhoum, A.; Ramirez-Serrano, A.; Martinuzzi, R. Number of Blades Influence on Rotor Performance in Open and Shrouded Configurations: Experimental Analysis. Aerospace 2024, 11, 644. [Google Scholar] [CrossRef]
- Bendat, J.S.; Piersol, A.G. Random Data: Analysis and Measurement Procedures; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 729. [Google Scholar]
- Beyer, W.H. Handbook of Tables for Probability and Statistics; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Coleman, H.W.; Steele, W.G. Experimentation, Validation, and Incertainty Analysis for Engineers; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Siavash, N.K.; Najafi, G.; Hashjin, T.T.; Ghobadian, B.; Mahmoodi, E. An innovative variable shroud for micro wind turbines. Renew. Energy 2020, 145, 1061–1072. [Google Scholar] [CrossRef]
- Zakariaa, A.F.; Nasirb, M.F.M.; bin Mukhtar, A.; Ridzuand, M.N. Design Analysis of Open and Ducted Propellers in UAV Application. J. Kejuruter. SI 2022, 5, 119–125. [Google Scholar] [CrossRef]
- Siddiqi, Z.; Lee, J.W. Experimental and numerical study of novel Coanda-based unmanned aerial vehicle. J. Eng. Appl. Sci. 2022, 69, 76. [Google Scholar] [CrossRef]




| Model | CALT DYDW-003 | CALT DYLY-103 | |
|---|---|---|---|
| Measurand | Thrust | Torque | Total Thrust |
| Range | 0–98.1 N | 0–3 Nm | 0–98.1 N |
| Sensitivity | 0.9 mV/V | 0.5 mV/V | 2 mV/V |
| Accuracy | 0.3% rdg | 0.03% rdg | |
| Non-Linearity | 0.1% F.S. | 0.1% F.S. | |
| Rotor | Ambient Pressure | Temperature | Density |
|---|---|---|---|
| A | 89,300 | 295 | 1.054 |
| B | 89,800 | 296 | 1.057 |
| Turbulence Model | Realizable |
| Wall Treatment | Enhanced Wall Function |
| Solver | Pressure based |
| Spatial Discretization | |
| Gradient | Least square cell based |
| Pressure Method | Second Order |
| Turbulent kinetic Energy | First-Order Upwind |
| Turbulent Dissipation Rate | First-Order Upwind |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dayhoum, A.; Ramirez-Serrano, A.; Martinuzzi, R.J. Design of an Experimental Test Rig for Shrouded and Open Rotors for Small Rotary Wing Unmanned Aerial System. Electronics 2025, 14, 1584. https://doi.org/10.3390/electronics14081584
Dayhoum A, Ramirez-Serrano A, Martinuzzi RJ. Design of an Experimental Test Rig for Shrouded and Open Rotors for Small Rotary Wing Unmanned Aerial System. Electronics. 2025; 14(8):1584. https://doi.org/10.3390/electronics14081584
Chicago/Turabian StyleDayhoum, Abdallah, Alejandro Ramirez-Serrano, and Robert J. Martinuzzi. 2025. "Design of an Experimental Test Rig for Shrouded and Open Rotors for Small Rotary Wing Unmanned Aerial System" Electronics 14, no. 8: 1584. https://doi.org/10.3390/electronics14081584
APA StyleDayhoum, A., Ramirez-Serrano, A., & Martinuzzi, R. J. (2025). Design of an Experimental Test Rig for Shrouded and Open Rotors for Small Rotary Wing Unmanned Aerial System. Electronics, 14(8), 1584. https://doi.org/10.3390/electronics14081584