Adaptive Multi-Source Ambient Backscatter Communication Technique for Massive Internet of Things



Abstract
1. Introduction
- A low-power adaptive AmBC strategy for massive IoT networks is designed to enhance backscatter performance. Specifically, the passive BDs locally choose the appropriate backscatter modes and RCs to guarantee sufficient RF-EH, according to the decision threshold assigned by the BR. The BDs that can harvest enough power choose PS mode and the others adopt HTB mode. The sum data rate is maximized by jointly optimizing the RCs of BDs in PS mode and both the RCs and transmit time allocation for the BDs in HTB mode.
- To design decision threshold and optimization solutions, our work proposes a joint sum rate maximization problem where the backscatter mode, RCs, and transmit TA are all considered. The proposed problem is complicated and non-convex. We decompose this problem into several subproblems and address them sequentially to obtain the final solution.
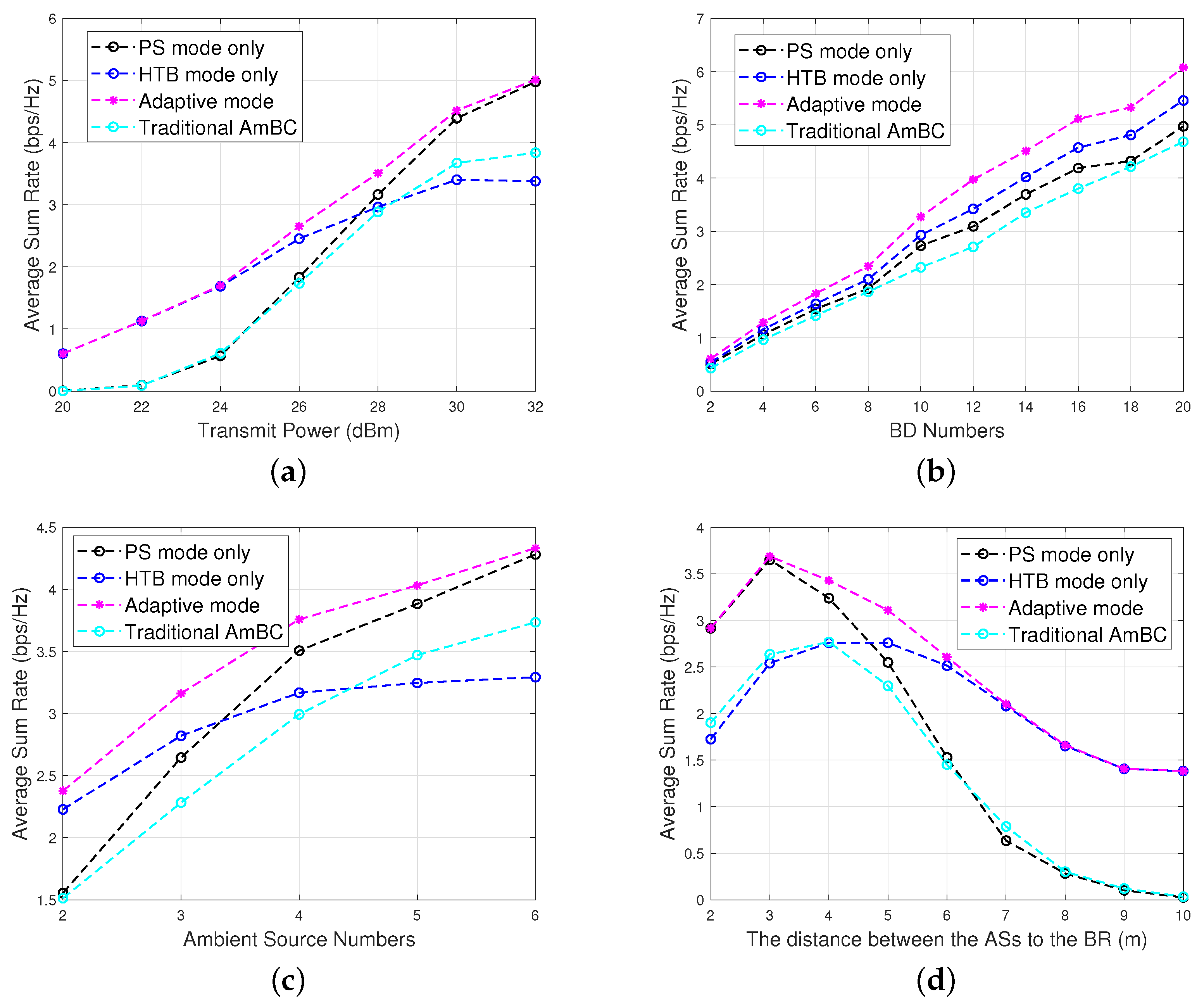
- To validate the outage probability and sun rate performance of our proposed adaptive strategy, extensive simulations compare them with non-adaptive transmission in massive IoT networks. The simulation results highlight the superior stability and efficiency of our proposed scheme in multi-AS and multi-BD AmBC systems. Our proposed low-power adaptive AmBC can achieve a 34.8% average sum rate performance improvement compared to a traditional AmBC with a common setup, i.e., 27 dBm transmit power, 10 BDs, three ASs, and 5 m distance between the ASs and the BR. Moreover, we have provided the mathematical derivation of the outage probabilities and conducted verification. The results confirm the accuracy and tightness of the derivations, where the error does not exceed 0.01.
- As for application scenarios, our proposed low-power adaptive strategy is particularly well suited for massive IoT involving multiple AS and multiple BD. For instance, it applies to scenarios with multiple ASs such as smart homes, as well as to smart agriculture and smart logistics where there are densely deployed passive BDs. In these scenarios, the method can enhance the network sum rate, ensure more stable connections, and reduce the outage probability, thereby enabling massive communication.
2. System Model
2.1. Low-Power Adaptive Strategy
- As a central device, the BR globally divides the J BDs into two subsets, and , by designing a decision threshold . Specifically, the BR assigns the decision threshold to the J BDs. The BDs in , which can harvest more than power, locally decide that they are supposed to adopt PS mode. The others, in , which cannot harvest sufficient power, adopt HTB mode. By assigning the appropriate , the BR can easily balance the outage probability and sum data rate performance of the J BDs while the passive BDs are insensitive to decision changes. To further boost the adaptive strategy by achieving a maximum sum data rate while ensuring power supply constraints, the BR jointly designs optimal RCs for the BDs in , optimal harvest accumulation time duration , and optimal RC via solving a sum rate maximization problem.
- At the passive BDs, they can receive the decision threshold from the BR using an analog circuit, as in [4,24], and compare their harvested power strength with . In the PS backscatter mode, the transmit frame includes a training period and a data transmission period, as shown in Figure 2. They adjust their RC to backscatter ambient signals as much as possible while guaranteeing their minimum circuit operating energy. In the HTB backscatter mode, the BDs first harvest energy in the time period before backscattering to satisfy their minimum circuit operating energy, as shown in Figure 2. Different from the traditional HTT protocol, which makes an active transmission, the BD in HTB mode still adopts backscatter communication with an RC since it is a passive device without any active RF components.
2.2. Signal Model
2.2.1. Direct-Link Interference Signal
2.2.2. Cascaded Forward-Link and Backscatter-Link Signals
2.2.3. Overall Superposed Signal
2.3. Problem Formulation
3. Solution to the Sum Rate Maximization Problem
3.1. RC Optimization
3.2. Time Allocation
3.3. User Scheduling
| Algorithm 1 Joint optimizing method for the sum rate maximization problem |
| Input: channel gains: , and , which can be estimated as [27,28,29] using training symbols in training period as shown in Figure 2Output: |
4. Outage Probability Analysis for Multi-Source AmBC
4.1. Outage Probability of the j-th BD Using PS Mode
4.2. Outage Probability of the j-th BD Using HTB Mode
5. Numerical and Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
Appendix B.1. Calculating the Joint Probability
Appendix B.2. Calculating the Conditional CDF Fbj (x)
Appendix C
Appendix D
References
- Transforma Insights. IoT Connections Forecast 2023–2034. 2025. Available online: https://transformainsights.com/research/forecast/highlights (accessed on 9 March 2025).
- Zhao, N.; Yu, F.R.; Sun, H.; Li, M. Adaptive power allocation schemes for spectrum sharing in interference-alignment-based cognitive radio networks. IEEE Trans. Veh. Technol. 2015, 65, 3700–3714. [Google Scholar] [CrossRef]
- Van Huynh, N.; Hoang, D.T.; Lu, X.; Niyato, D.; Wang, P.; Kim, D.I. Ambient backscatter communications: A contemporary survey. IEEE Commun. Surv. Tutor. 2018, 20, 2889–2922. [Google Scholar] [CrossRef]
- Liu, V.; Parks, A.; Talla, V.; Gollakota, S.; Wetherall, D.; Smith, J.R. Ambient backscatter: Wireless communication out of thin air. ACM SIGCOMM Comput. Commun. Rev. 2013, 43, 39–50. [Google Scholar] [CrossRef]
- Zargari, S.; Hakimi, A.; Rezaei, F.; Tellambura, C.; Maaref, A. Signal detection in ambient backscatter systems: Fundamentals, methods, and trends. IEEE Access 2023, 11, 140287–140324. [Google Scholar] [CrossRef]
- Wang, X.; Yiğitler, H.; Duan, R.; Menta, E.Y.; Jäntti, R. Coherent multiantenna receiver for BPSK-modulated ambient backscatter tags. IEEE Internet Things J. 2021, 9, 1197–1211. [Google Scholar] [CrossRef]
- Yang, H.; Ding, H.; Cao, K.; Elkashlan, M.; Li, H.; Xin, K. A RIS-segmented symbiotic ambient backscatter communication system. IEEE Trans. Veh. Technol. 2023, 73, 812–825. [Google Scholar] [CrossRef]
- Zargari, S.; Tellambura, C.; Maaref, A. Improved Energy-Based Signal Detection for Ambient Backscatter Communications. IEEE Trans. Veh. Technol. 2024, 73, 14778–14793. [Google Scholar] [CrossRef]
- Chen, J.; Guan, Q.; Rong, Y.; Yu, H. Detections for Ambient Backscatter Communications Systems with Dynamic Sources. IEEE Trans. Commun. 2025. Early Access. [Google Scholar] [CrossRef]
- Li, D. Backscatter communication via harvest-then-transmit relaying. IEEE Trans. Veh. Technol. 2020, 69, 6843–6847. [Google Scholar] [CrossRef]
- Yang, H.; Ye, Y.; Chu, X.; Sun, S. Energy efficiency maximization for UAV-enabled hybrid backscatter-harvest-then-transmit communications. IEEE Trans. Wirel. Commun. 2021, 21, 2876–2891. [Google Scholar] [CrossRef]
- Shan, F.; Luo, J.; Jin, Q.; Cao, L.; Wu, W.; Ling, Z.; Dong, F. Optimal Harvest-then-Transmit Scheduling for Throughput Maximization in Time-varying RF Powered Systems. IEEE J. Sel. Areas. Commun. 2024, 42, 3140–3156. [Google Scholar] [CrossRef]
- Ye, Y.; Shi, L.; Chu, X.; Lu, G. On the outage performance of ambient backscatter communications. IEEE Internet Things J. 2020, 7, 7265–7278. [Google Scholar] [CrossRef]
- Li, D.; Liang, Y.C. Adaptive ambient backscatter communication systems with MRC. IEEE Trans. Veh. Technol. 2018, 67, 12352–12357. [Google Scholar] [CrossRef]
- Ye, Y.; Xu, R.; Chen, G.; Benevides da Costa, D.; Lu, G. QoS-Guaranteed Adaptive Power Reflection Coefficient for Self-Powered Cooperative Ambient Backscatter Communication. IEEE Wirel. Commun. Lett. 2024, 13, 2812–2816. [Google Scholar] [CrossRef]
- Goay, A.C.Y.; Mishra, D.; Seneviratne, A. Optimal reflection coefficients for ASK modulated backscattering from passive tags. IEEE Trans. Commun. 2025, 73, 1692–1708. [Google Scholar] [CrossRef]
- Zhao, F.; Wei, L.; Chen, H. Optimal time allocation for wireless information and power transfer in wireless powered communication systems. IEEE Trans. Veh. Technol. 2015, 65, 1830–1835. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Y.; Gong, S.; Shen, W.; Xing, C.; An, J. Optimal transmission strategy and time allocation for RIS-enhanced partially WPSNs. IEEE Trans. Wirel. Commun. 2022, 21, 7207–7221. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Y.; Zhang, H.; Wang, G.; Li, X.; Yuen, C. Full-Duplex-Enhanced Wireless-Powered Backscatter Communication Networks: Radio Resource Allocation and Beamforming Joint Optimization. IEEE Trans. Green Commun. Netw. 2024, 8, 730–740. [Google Scholar] [CrossRef]
- Asif, M.; Bao, X.; Ihsan, A.; Khan, W.U.; Li, X.; Chatzinotas, S.; Dobre, O.A. NOMA-Based Ze-RIS Empowered Backscatter Communication with Energy-Efficient Resource Management. IEEE Trans. Commun. 2025. Early Access. [Google Scholar] [CrossRef]
- Guo, H.; Zhang, Q.; Li, D.; Liang, Y.C. Noncoherent multiantenna receivers for cognitive backscatter system with multiple RF sources. arXiv 2018, arXiv:1808.04316. [Google Scholar]
- Liu, W.; Shen, S.; Tsang, D.H.; Murch, R. Enhancing ambient backscatter communication utilizing coherent and non-coherent space-time codes. IEEE Trans. Wirel. Commun. 2021, 20, 6884–6897. [Google Scholar] [CrossRef]
- Wang, G.; Gao, F.; Fan, R.; Tellambura, C. Ambient backscatter communication systems: Detection and performance analysis. IEEE Trans. Commun. 2016, 64, 4836–4846. [Google Scholar] [CrossRef]
- Parks, A.N.; Liu, A.; Gollakota, S.; Smith, J.R. Turbocharging ambient backscatter communication. ACM SIGCOMM Comput. Commun. Rev. 2014, 44, 619–630. [Google Scholar] [CrossRef]
- Guo, H.; Zhang, Q.; Xiao, S.; Liang, Y.C. Exploiting multiple antennas for cognitive ambient backscatter communication. IEEE Internet Things J. 2018, 6, 765–775. [Google Scholar] [CrossRef]
- Ding, H.; da Costa, D.B.; Ge, J. Outage Analysis for Cooperative Ambient Backscatter Systems. IEEE Wirel. Commun. Lett. 2020, 9, 601–605. [Google Scholar] [CrossRef]
- Ma, S.; Wang, G.; Fan, R.; Tellambura, C. Blind channel estimation for ambient backscatter communication systems. IEEE Commun. Lett. 2018, 22, 1296–1299. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, G.; Atapattu, S.; He, R.; Liang, Y.C. Channel estimation for ambient backscatter communication systems with massive-antenna reader. IEEE Trans. Veh. Technol. 2019, 68, 8254–8258. [Google Scholar] [CrossRef]
- Abdallah, S.; Verboven, Z.; Saad, M.; Albreem, M.A. Channel estimation for full-duplex multi-antenna ambient backscatter communication systems. IEEE Trans. Commun. 2023, 71, 3059–3072. [Google Scholar] [CrossRef]
- Van Huynh, N.; Hoang, D.T.; Niyato, D.; Wang, P.; Kim, D.I. Optimal time scheduling for wireless-powered backscatter communication networks. IEEE Wirel. Commun. Lett. 2018, 7, 820–823. [Google Scholar] [CrossRef]
- Kapucu, K.; Dehollain, C. A passive UHF RFID system with a low-power capacitive sensor interface. In Proceedings of the 2014 IEEE RFID Technology and Applications Conference (RFID-TA), Tampere, Finland, 8–9 September 2014; pp. 301–305. [Google Scholar]
- Lyu, B.; Guo, H.; Yang, Z.; Gui, G. Throughput maximization for hybrid backscatter assisted cognitive wireless powered radio networks. IEEE Internet Things J. 2018, 5, 2015–2024. [Google Scholar] [CrossRef]
- Kallenberg, O.; Kallenberg, O. Foundations of Modern Probability; Springer: Berlin/Heidelberg, Germany, 1997; Volume 2. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, D.; Wu, F.; Zhang, C.; Liu, Y. Adaptive Multi-Source Ambient Backscatter Communication Technique for Massive Internet of Things. Electronics 2025, 14, 1532. https://doi.org/10.3390/electronics14081532
Cheng D, Wu F, Zhang C, Liu Y. Adaptive Multi-Source Ambient Backscatter Communication Technique for Massive Internet of Things. Electronics. 2025; 14(8):1532. https://doi.org/10.3390/electronics14081532
Chicago/Turabian StyleCheng, Diancheng, Fan Wu, Cong Zhang, and Yuan’an Liu. 2025. "Adaptive Multi-Source Ambient Backscatter Communication Technique for Massive Internet of Things" Electronics 14, no. 8: 1532. https://doi.org/10.3390/electronics14081532
APA StyleCheng, D., Wu, F., Zhang, C., & Liu, Y. (2025). Adaptive Multi-Source Ambient Backscatter Communication Technique for Massive Internet of Things. Electronics, 14(8), 1532. https://doi.org/10.3390/electronics14081532