1. Introduction
Target detection is a critical component of intelligent transportation monitoring systems, providing essential information to the system by accurately identifying and locating targets in traffic. Millimeter-wave radar [
1], as one of the key sensors in intelligent transportation systems, detects and identifies targets by receiving signals reflected from objects [
2]. However, there are various types of traffic targets and vehicles in complex traffic environments. When millimeter-wave radar receives echo signals, it must not only detect actual vehicles on the road [
3,
4] but also handle clutter signals from the surrounding environment. These complex interference signals affect target echo signals, leading to false alarms or missed detections. As a key technique in millimeter-wave radar target detection, constant false alarm rate (CFAR) detection technology helps maintain a constant false alarm probability within a specified range, thereby ensuring the highest detection probability. Therefore, research into CFAR detection technology is crucial to improving the detection accuracy of millimeter-wave radar.
Regarding the algorithms related to constant false alarm detection technology, scholars both domestically and internationally have conducted extensive research. Traditional constant false alarm rate (CFAR) algorithms are divided into mean-based CFAR and ordered CFAR algorithms, with some scholars having conducted studies on these two types of CFAR algorithms. Safa A et al. [
5] proposed a low-complexity radar detector for indoor drone obstacle avoidance. Compared with Order Statistic CFAR (OS-CFAR) and other multi-target CFAR algorithms, it improves the detection probability while reducing the computational complexity, making it suitable for real-time applications. Rihan M Y et al. [
6] proposed a Censored Mean Clutter Map CFAR (CM-CM-CFAR) algorithm based on a hybrid of Censored Mean Level Detector CFAR (CMLD-CFAR) and Clutter Map CFAR (CM-CFAR), which solves the problem of the decreased detection performance of the CMLD-CFAR algorithm in multi-target and clutter edge environments. Jiménez L P J et al. [
7] proposed a general Cell-Averaged CFAR (CA-CFAR) detection model for Weibull distribution clutter, which solves the limitation of fixed shape parameters in previous CA-CFAR analysis and simplifies the model but limits the scope of application. Sun BB et al. [
8] proposed an improved CA-CFAR detector. First, the non-uniform points are eliminated, and the non-uniform environment is transformed into a uniform environment. Then, CA-CFAR is used to detect whether the unit to be tested is a target.
With the rise of adaptive CFAR algorithms, they have demonstrated outstanding performance in target detection, with stronger adaptability. Scholars have conducted extensive research on adaptive algorithms. Boudemagh N et al. [
9] proposed an automatic screening CFAR (AC-CFAR) detector for heterogeneous environments, which dynamically selects the most suitable traditional CFAR detection method according to background irregularities and has high detection performance for clutter edges and interfering targets in the environment. Zhang X et al. [
10] proposed a skewness-to-mean ratio CFAR detector for non-uniform Weibull clutter environments. This method uses skewness and the mean ratio to adaptively select the optimal reference window, improves target detection performance in multi-target environments, and reduces false alarms at the clutter edge. Subramanian, R. et al. [
11] proposed a Robust Variability Index CFAR (RVI-CFAR) detector to improve the detection performance in complex scenarios such as those with multiple targets or clutter edges by using variability index (VI) multi-stage optimized threshold estimation. Coluccia A et al. [
12] proposed a customized adaptive CFAR detection algorithm, which uses a customized CFAR feature plane to provide a detector that can perform well under matching and mismatching conditions to ensure its adaptability. Yang X et al. [
13] proposed a method based on cell average clutter map (CA-CM) CFAR to improve traditional CFAR detection by dynamically adjusting the detection threshold based on the clutter variability index. Wang X et al. [
14] proposed a robust variation index CFAR detector (RWVI-CFAR) combined with an automatic outlier external value review maximum likelihood CFAR (AOCML-CFAR) strategy to address the challenge of target and clutter edge interference. Ni L et al. [
15] proposed a cascaded filter adaptive CFAR detector, which combines the advantages of multiple CFAR techniques through a two-stage detection process and effectively enhances the detection performance in multi-target and clutter edge scenes. Qu C et al. [
16] proposed an adaptive CFAR detector based on the quadratic sum of sample autocovariance, which solves the challenges of clutter and weak target detection by removing complex clutter modeling and theoretical threshold derivation and has strong resistance to interference in multi-target environments. Xiangwei M et al. [
17] proposed an improved rank and non-parametric CFAR method to solve the problem of unstable false alarm rate control in clutter edge conditions, but the performance is poor in high-dynamic-range environments. Madjidi H et al. [
18] proposed a bilateral automatic truncated CFAR detector to solve the detection challenges in heterogeneous clutter environments, but its performance has certain limitations in extreme clutter scenarios where edge and interfering targets coexist. Liu K et al. [
19] proposed a CFAR detection algorithm based on clutter knowledge (CK-CFAR) to improve the detection performance of radar in a non-uniform dynamic clutter environment.
Scholars have also explored target detection algorithms tailored to specific scenarios and signal characteristics. Yang B et al. [
20] proposed a CFAR algorithm based on the Monte Carlo principle (MC) for moving target detection using millimeter-wave radar in road traffic environments. Cao Z et al. [
21] proposed a new CFAR detection algorithm based on sparse adaptive correlation maximization (SACM-CFAR) to detect targets by utilizing the correlation between the linear measurement of the radar intermediate frequency (IF) signal and the perception matrix. Wei Z et al. [
22] proposed a region-based CFAR framework that utilizes the high spatiotemporal resolution of millimeter-wave radar to improve detection accuracy and significantly enhance the detection performance in SISO and MIMO radar systems.
In summary, researchers have proposed various improvements to address the limitations of CFAR algorithms, significantly enhancing target detection accuracy and interference resistance. Furthermore, methods such as adaptive threshold adjustment, attention mechanisms, and non-parametric detection have bolstered the robustness of CFAR algorithms in complex backgrounds and multi-target environments. However, in real-world traffic scenarios, the complexity of the target detection background remains a challenge, and existing methods still suffer from reduced detection accuracy, as well as false alarms and missed detections, particularly for small vehicle targets.
In response to the issue of the low detection accuracy of CFAR algorithms in real traffic scenes, this paper proposes an improved algorithm based on the traditional variable index CFAR (VI-CFAR) detector. The proposal is developed through an in-depth analysis of the characteristics of target signals in traffic environments. The main contributions of this paper are as follows:
Introduction of background power transition points. By accurately calculating the background power of different signal units within the reference window, we determine whether the background environment of the reference window is homogeneous, providing a prior condition for subsequent background environment classification, thus offering more accurate background environmental information for target detection.
Introduction of higher-order statistical skewness of clutter signals. In real environments, the distribution of background clutter often does not strictly follow a Gaussian distribution, particularly in complex environments such as traffic monitoring, where the clutter distribution may exhibit skewness (i.e., non-zero skewness). Higher-order statistical skewness can more precisely describe the distribution characteristics of clutter signals, thereby effectively improving the accuracy of background clutter power estimation.
Improvement of adaptive threshold generation rules. The traditional VI-CFAR threshold decision rule is modified, with the OS-CFAR algorithm, which performs better in multi-target environments, replacing the SO-CFAR algorithm, thus enhancing the performance of the target detection algorithm.
3. The ADVI-CFAR-Based Target Detection Algorithm
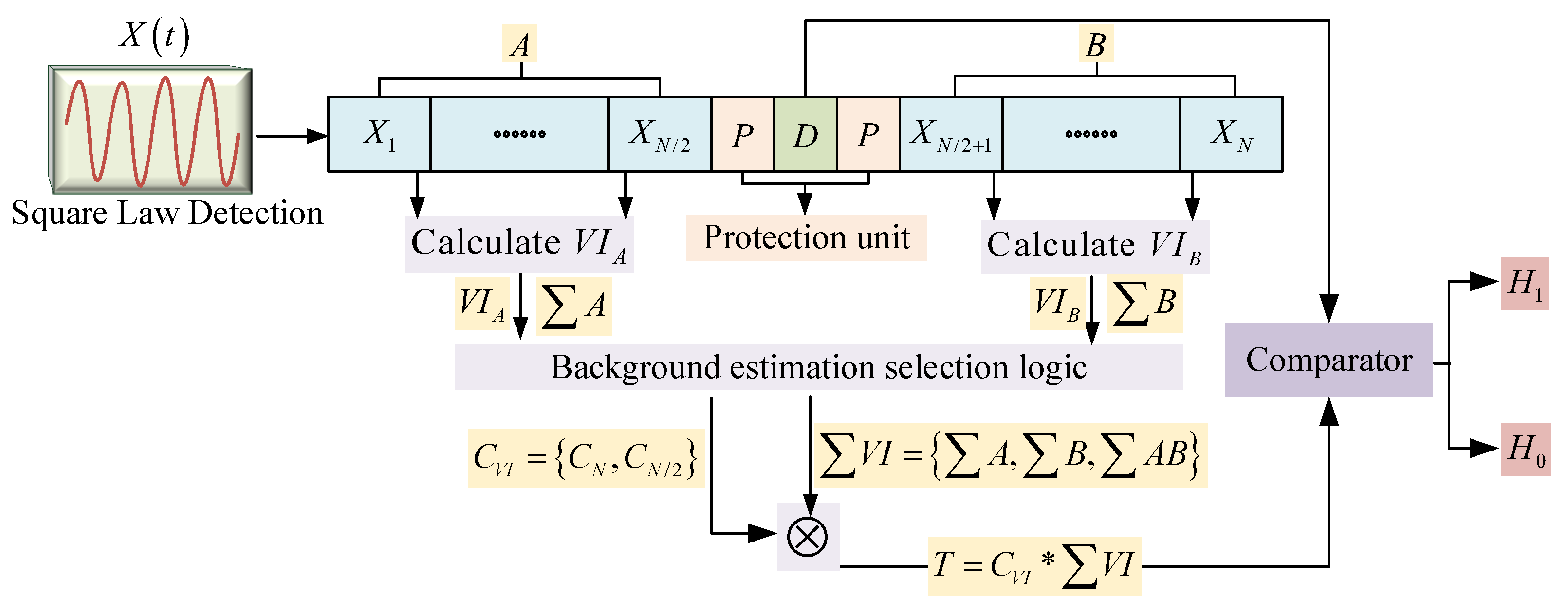
In response to the limitations of the VI-CFAR algorithm in real traffic scenarios, the ADVI-CFAR detector refines the method for background environment classification within the reference windows, thus improving detection performance in non-homogeneous environments and enabling the millimeter-wave radar to achieve better detection performance in complex traffic environments. ADVI-CFAR first calculates whether there are significant power fluctuations in the front and rear reference windows to determine whether the background environment is homogeneous. It then improves the original variability index by incorporating higher-order statistical parameters, such as skewness, to assess changes in the clutter pattern further. This, in combination with transitional points, is used to classify the background environment. Finally, based on the classification results, different threshold generation methods are selected to optimize detection. This approach significantly improves the radar’s ability to distinguish the background environment, improving the detection performance in challenging real-world traffic environments.
Assume that the reference window consists of
N reference cells, divided into the front half of reference window
A and the rear half of reference window
B. The clutter echoes follow a Gaussian distribution, and the sampling of each reference cell, after passing through a square-law detector, follows an exponential distribution. Its probability density function (PDF) is given by
where
is the estimated background noise power of the reference cell
X and can be expressed as
where
is the estimated thermal noise power,
is the interference-to-noise ratio (INR), and
is the clutter-to-noise ratio (CNR).
To calculate the position of the transition point
p [
9], we need to assess whether there is a significant increase or decrease in power within the reference window. Since the reference cells are not sorted, both power increases and decreases may exist. The transition variable
p is used to measure the signal variation and is expressed as
where
is the
j-th signal in the reference window, and
is the threshold factor of CA-CFAR, calculated as follows:
where
is the desired false alarm rate. By measuring the signal change in the reference window by the transition variable, the discrimination method can be expressed as
If , there is no transition in the signal variation within the reference window, and it is classified as a homogeneous environment, potentially a uniform environment. If , a transition point in the signal variation is detected within the reference window, and it is classified as a non-homogeneous environment, potentially a clutter edge environment or a multi-target environment.
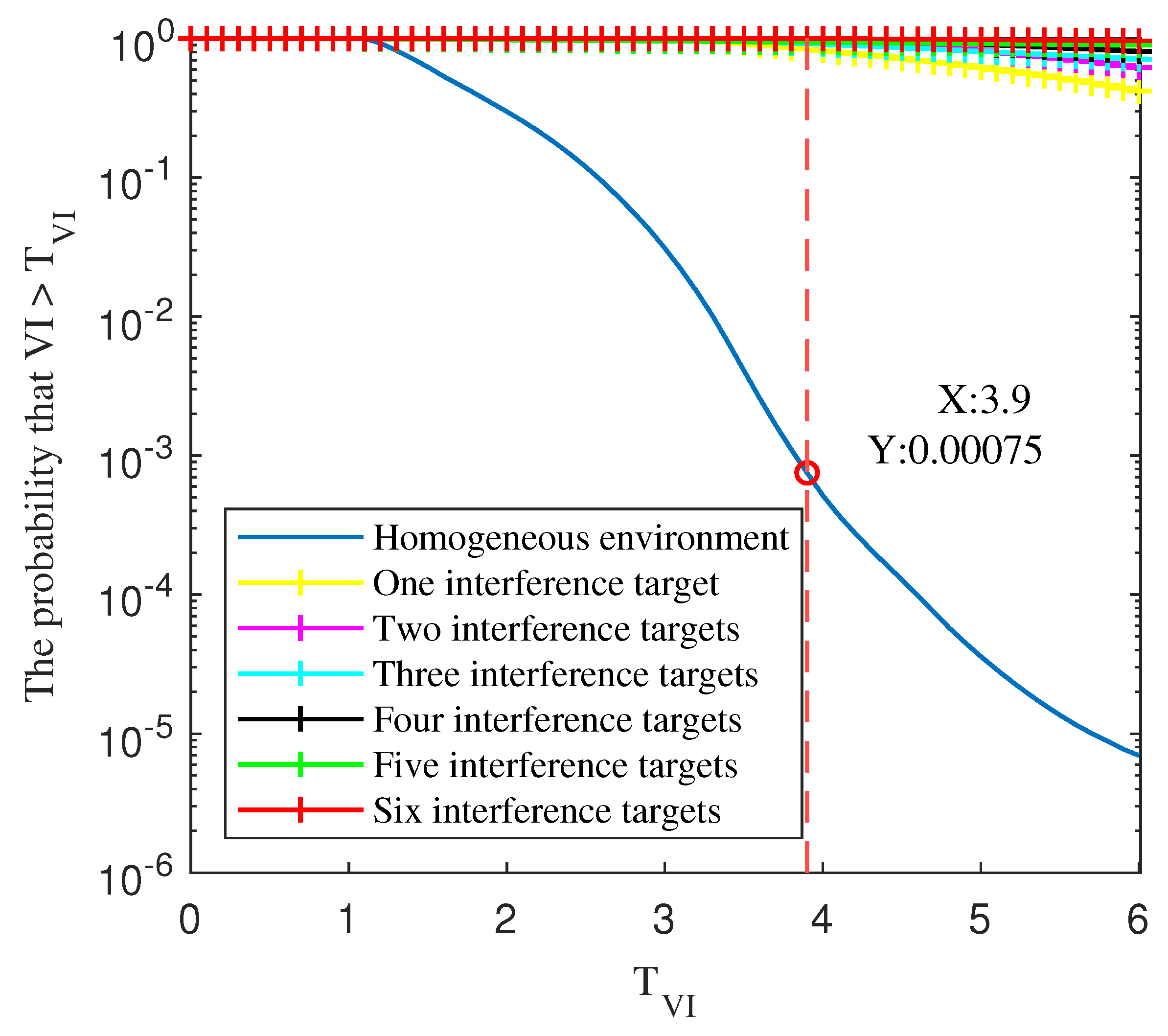
The variability index and threshold are compared by incorporating the transition variable results. The traditional VI-CFAR algorithm calculates the variability index based on the mean and standard deviation of the signal. However, the background clutter distribution in real environments often does not strictly follow a Gaussian distribution, especially in complex environments such as traffic monitoring, where the clutter distribution may exhibit skewness [
10] (i.e., non-zero skewness). When an interfering target is in the reference window, the signal skewness will increase significantly, as shown in
Figure 3.
To address this, we extend the original variability index calculation method by incorporating higher-order statistical moments, specifically skewness, to assess changes in the clutter pattern further. This allows for a more precise differentiation of the background environment.
In the VI-CFAR algorithm, the variability index
calculation method is expressed as
where
and
represent the overall mean and variance of the reference window’s magnitude starting from the transition point and are expressed as
To improve the sensitivity of the variability index in the background environment, higher-order statistical moments, specifically skewness
, are introduced to measure the signal distribution characteristics. The calculation method is expressed as
After adding Equation (
26) to (
23) and rearranging it, the improved variability index
is expressed as
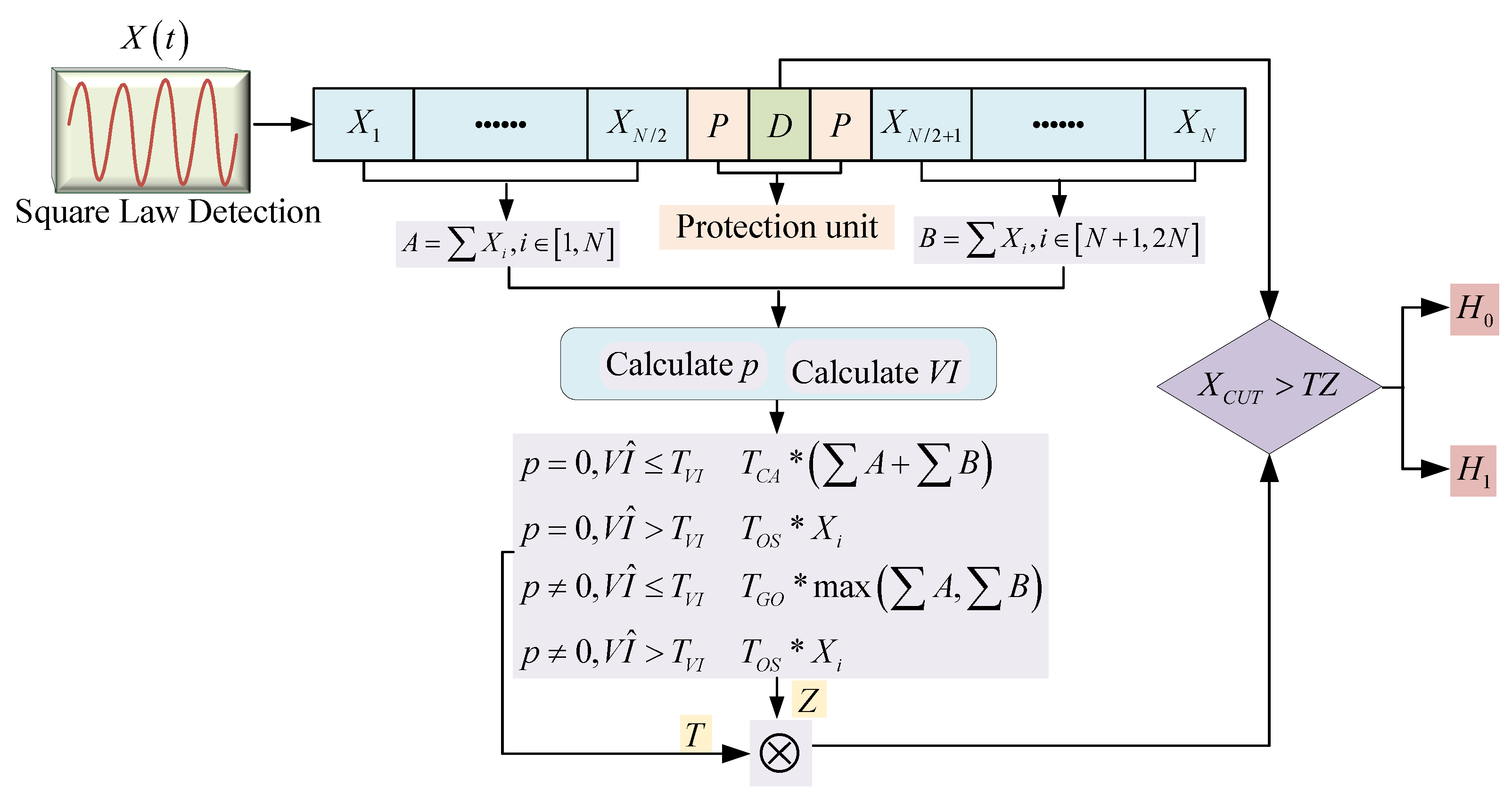
By combining the transition variable, an appropriate method for calculating the detection threshold is selected. The improved variability index
is then compared with the threshold
. A processing flowchart of the ADVI-CFAR algorithm is shown in
Figure 4.
The decision rule for comparing the variability index
with the threshold
is as follows:
Based on the calculated
value, the homogeneity of the current environment is judged. Suppose that the
value is greater than the threshold
. In that case, the current environment exhibits strong non-homogeneity, meaning that the reference window is either in a clutter edge environment or contains interference targets. Conversely, if the
value is less than the threshold, the background environment of the current reference window is homogeneous. The detection threshold generation method is shown in
Table 2.
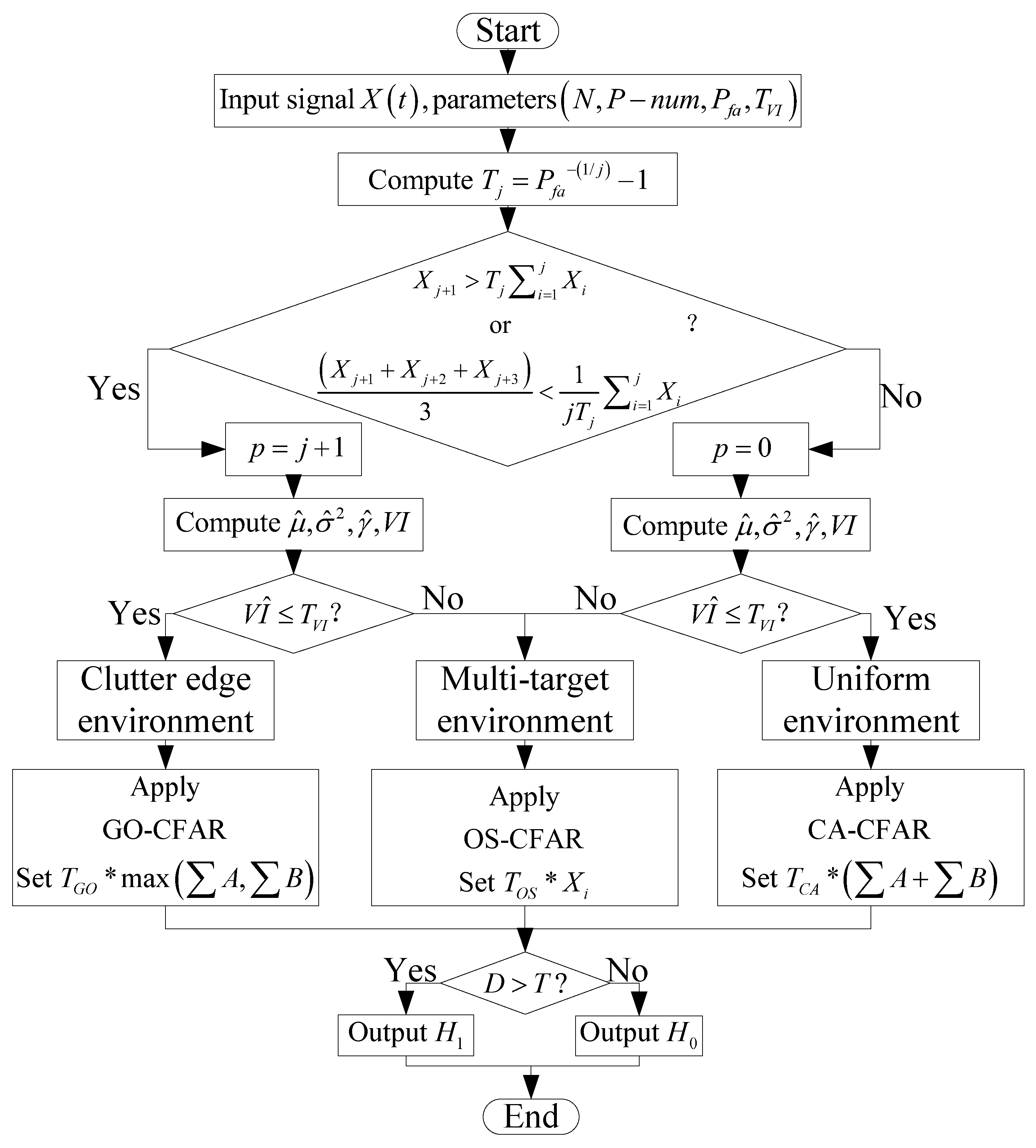
Since the OS-CFAR algorithm has better detection performance in a multi-target environment, the SO-CFAR detection algorithm in the traditional VI-CFAR algorithm is replaced by the OS-CFAR algorithm for target detection.
When and , there is no transition in the background environment, and the signal amplitude of the reference cells within the reference window is uniform. Therefore, the background environment is classified as a homogeneous environment. Since CA-CFAR demonstrates good detection performance in homogeneous environments, the detection threshold is calculated using .
When the INR is low, the method used in this paper for detecting transitions fails to recognize the existence of the transition point in the reference window, and the result is . When and , there is no transition in the background environment, and the reference window’s bandwidth is homogeneous. Therefore, the background environment is likely a multi-target environment. Since OS-CFAR demonstrates good detection performance in multi-target environments, it replaces the SO-CFAR algorithm in the traditional VI-CFAR algorithm. This method uses to calculate the detection threshold, where is the signal at the i-th reference window.
When and , there is a transition in the background environment, and the reference window’s bandwidth value starting from the transition point is homogeneous. Therefore, the background environment is classified as a cluttered edge environment. Since GO-CFAR provides good false alarm suppression in clutter edge environments, the virtual alarm rate is lower, so the detection threshold is calculated using .
When and , the background environment contains transitions, with the reference unit starting from the transition point. The background environment is identified as a multi-target environment due to the non-uniformity of the clutter. Since the background environment is identified as a multi-target scenario, the OS-CFAR method, which performs well in multi-target environments, is used for target detection. Therefore, the detection threshold is calculated using .
A flowchart of the ADVI-CFAR algorithm is shown in
Figure 5.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}