
Analysis of Maritime Wireless Communication Connectivity Based on CNN-BiLSTM-AM

Abstract
1. Introduction
1.1. Background
1.2. Related Work
1.3. Contributions
- A relay-assisted terrestrial–maritime collaborative network coverage enhancement scheme is proposed, which characterizes the dynamic characteristics of the maritime wireless environment by permitting the channel parameters to vary randomly in the channel modeling.
- In the analysis of maritime communication connectivity, the selection of the input features incorporates the ship navigation trajectories and real-time hydrometeorological parameters, fully considering the complexity and time variability of the maritime environment.
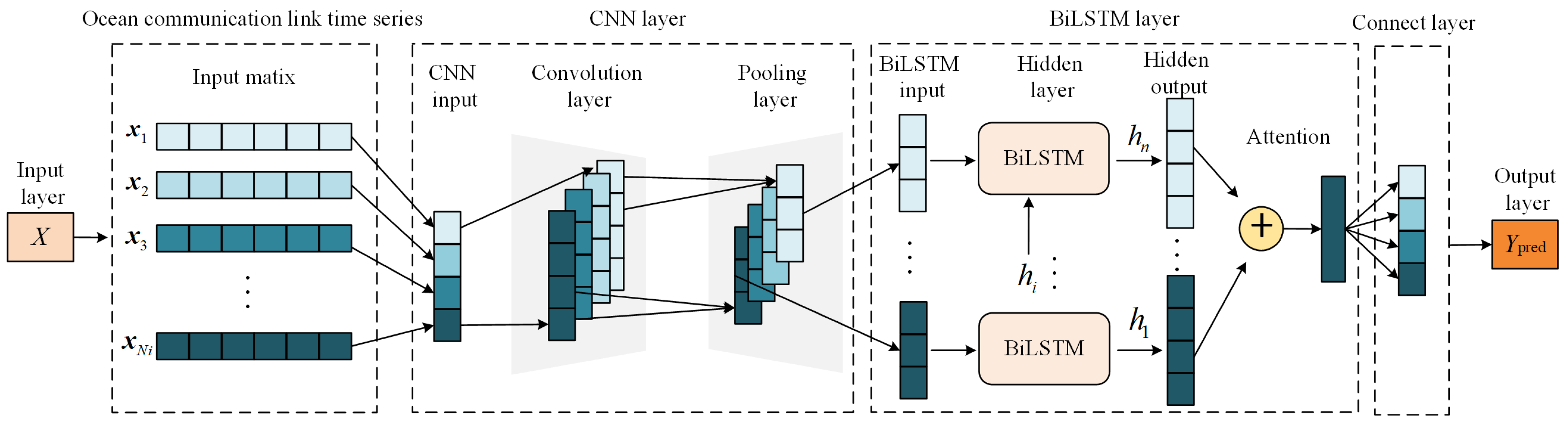
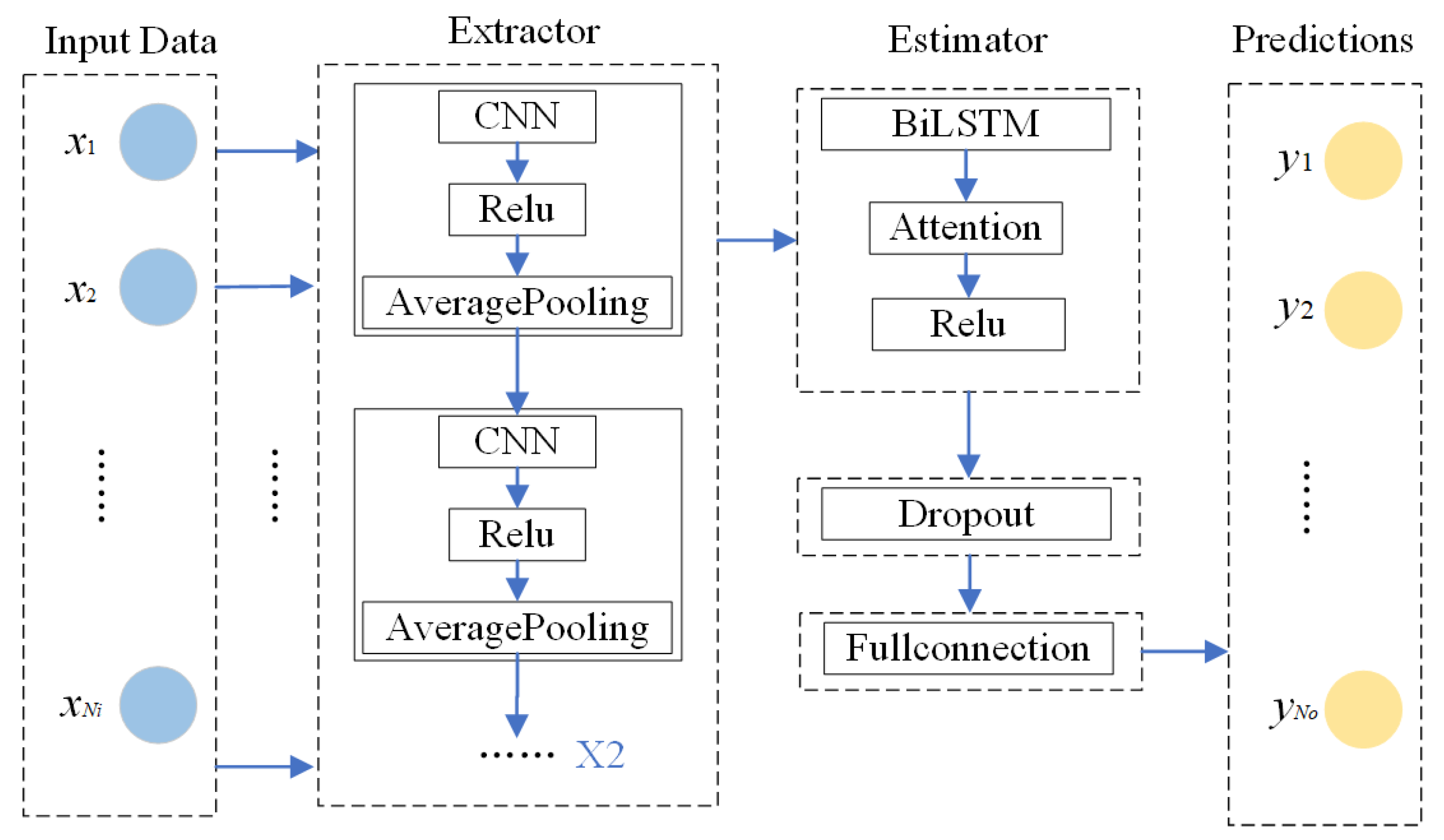
- A CNN-BiLSTM-AM cascade scheme is designed, where a CNN is used to extract the local features, BiLSTM is employed to model the long-term dependencies of the channel states, and an attention mechanism (AM) is introduced to adaptively focus on key node information. This approach achieves a high prediction accuracy.
2. The System Model
2.1. Wireless Channels
2.2. The Oceanic Environment
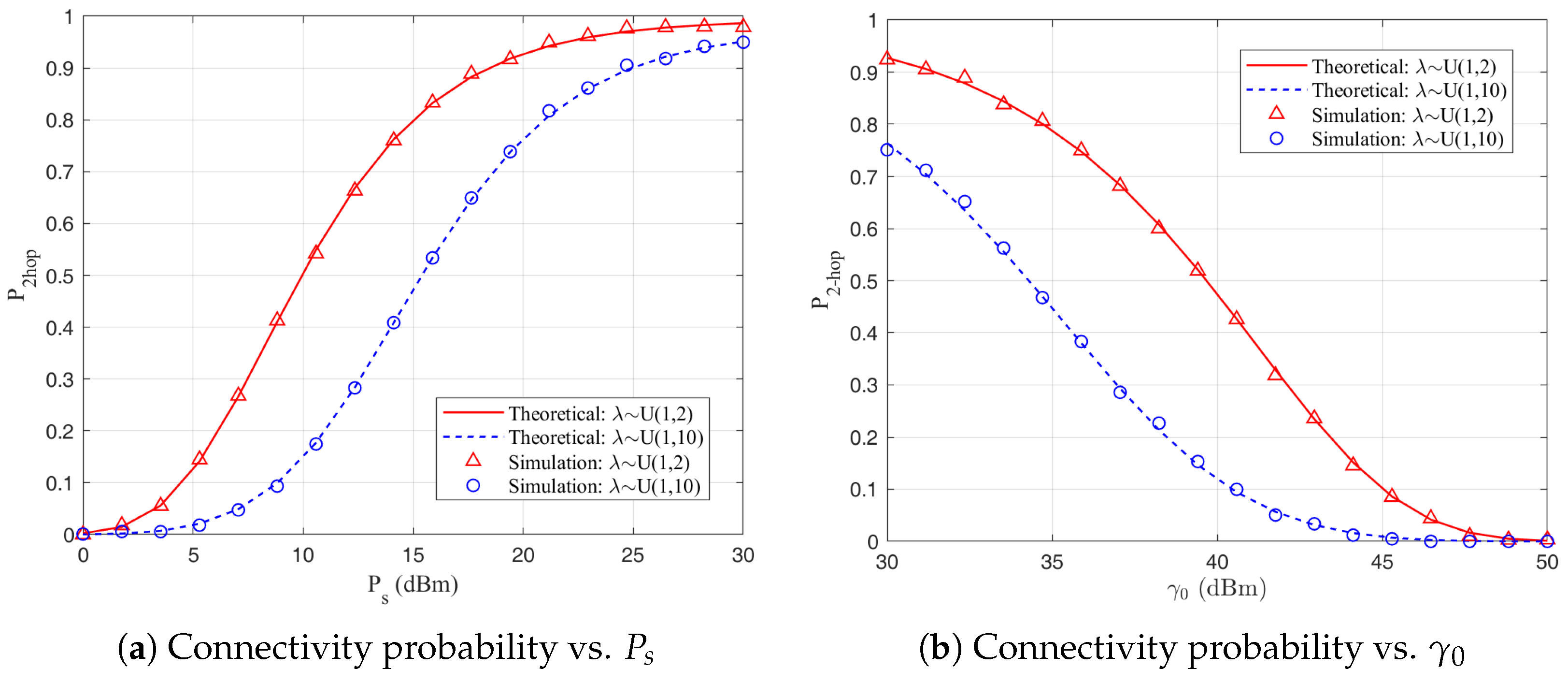
2.3. Connectivity Probability
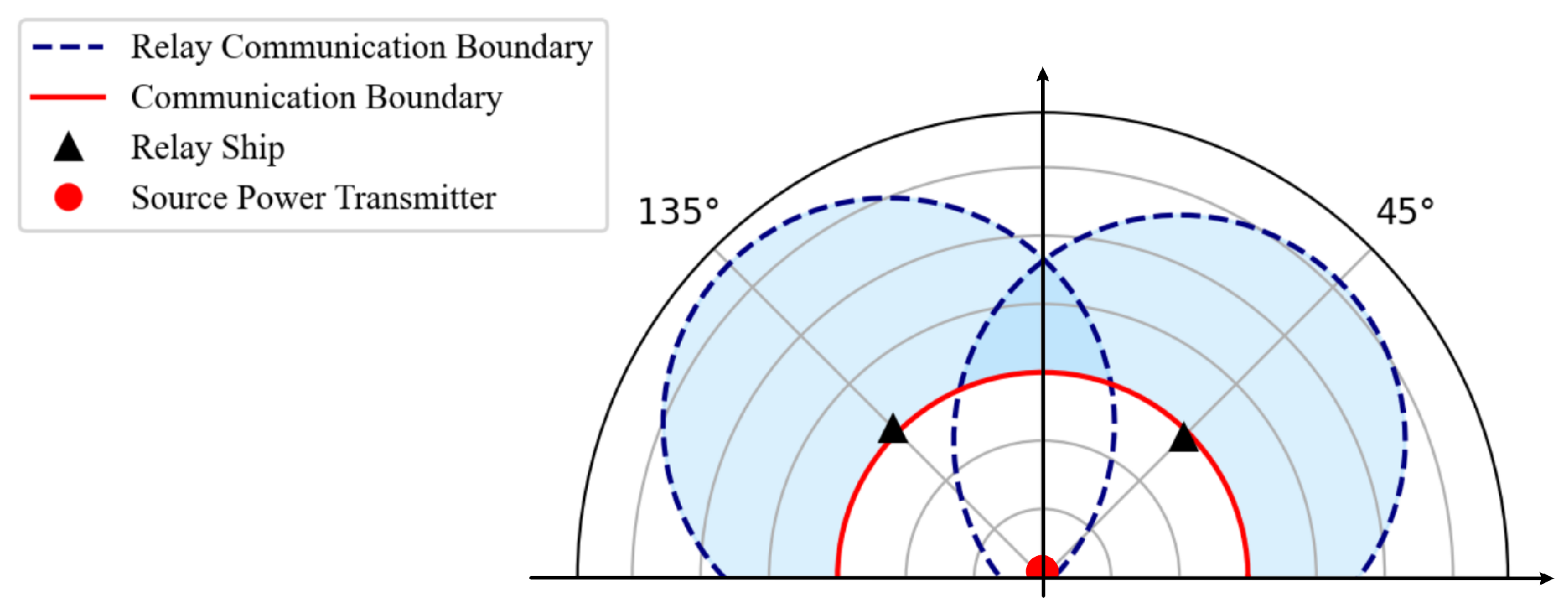
2.4. The Coverage Area
3. Principles of the Deep Learning Models
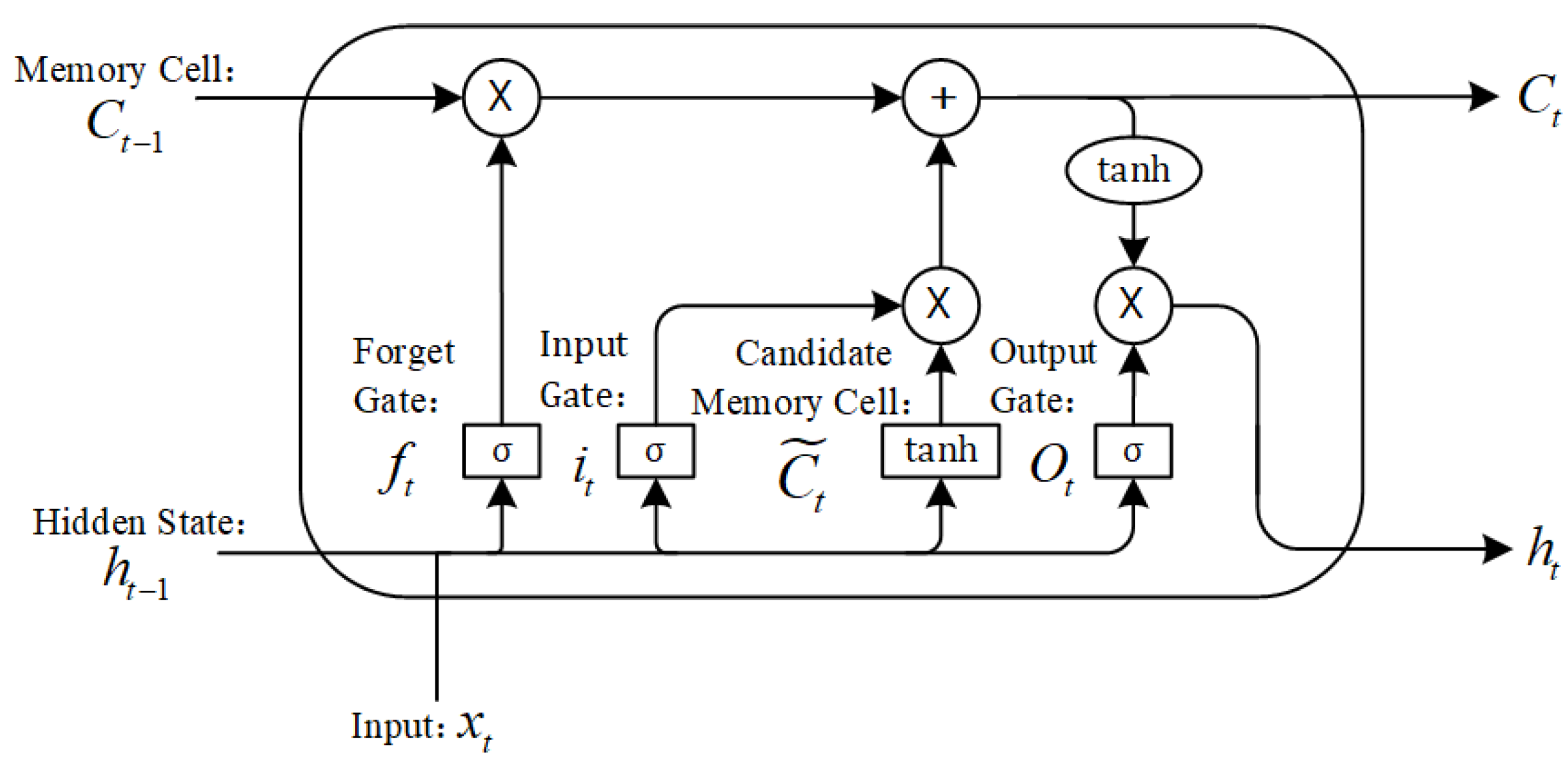
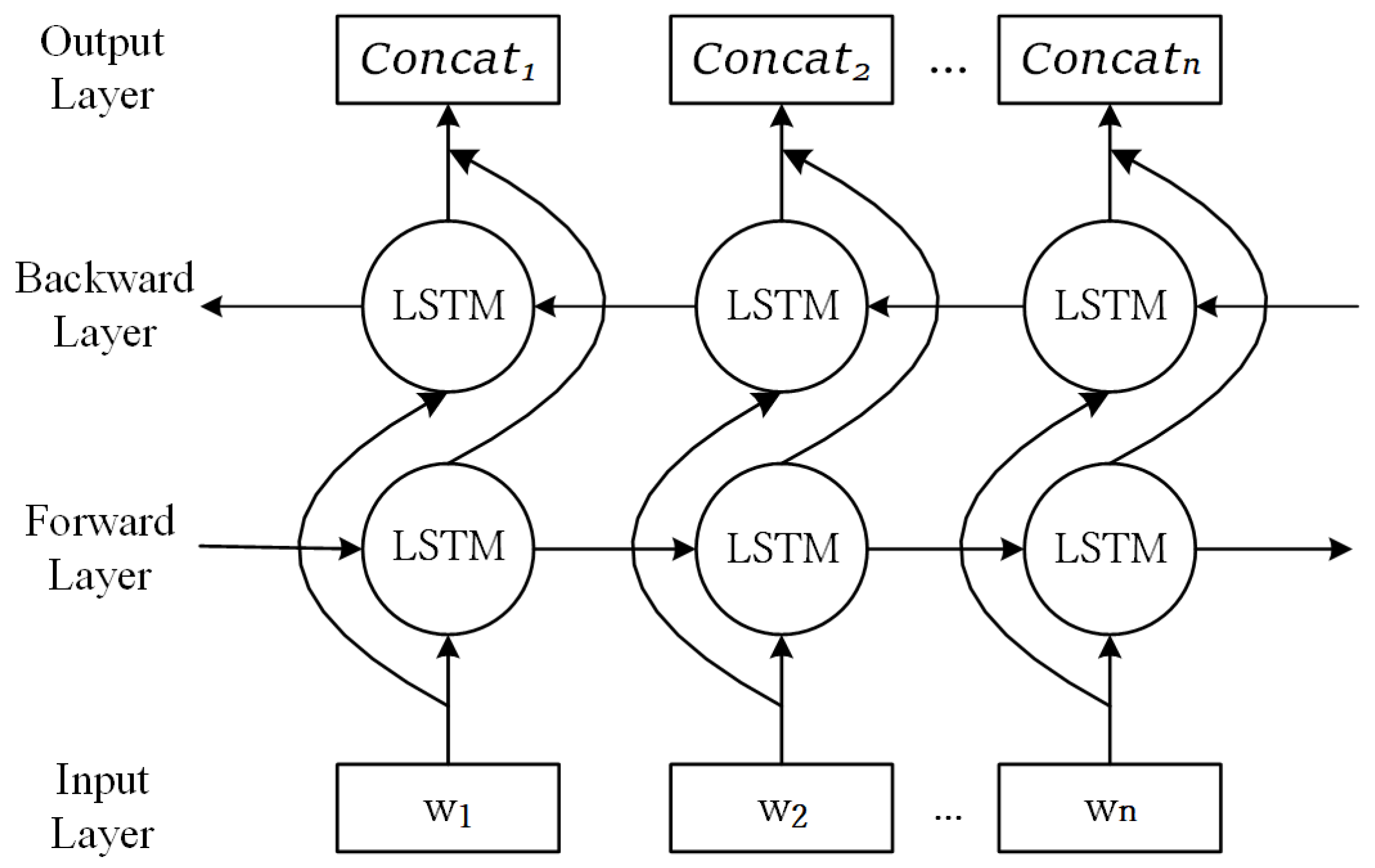
3.1. The CNN-BiLSTM Model
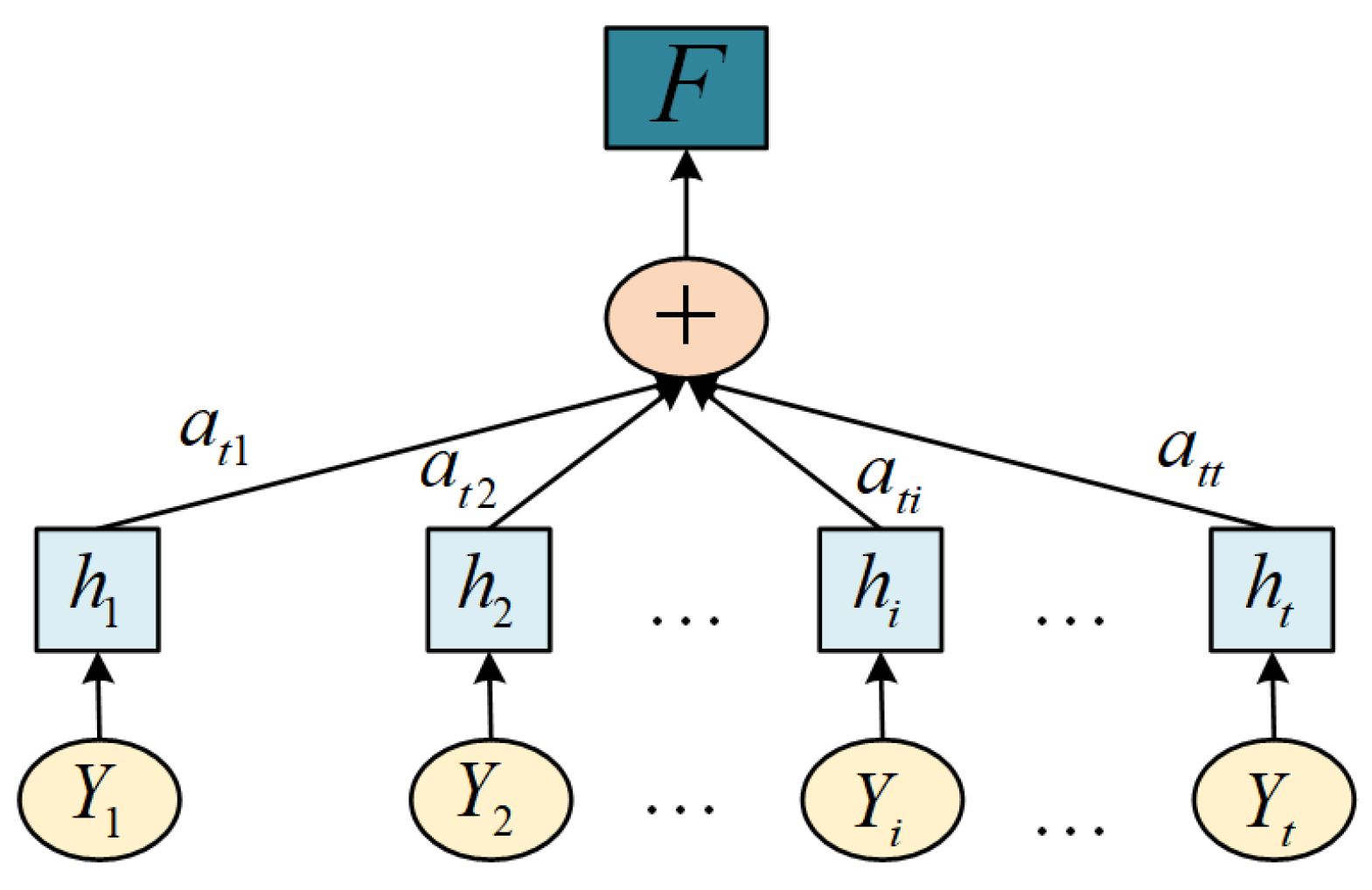
3.2. The Attention Mechanism
4. A Connectivity Analysis Based on the CNN-BiLSTM-AM Model
4.1. Input–Output Data
- Speed:,
- Direction Angles:,
- Distance:,
- Signal-to-Noise Ratio:,
- Wave Height:,
4.2. The Data Generation Method
| Algorithm 1 Approach to Data Generation |
Step 1: Input Data Generation 0. Parameter Initialization 1.1 Generation of Received Signal-to-Noise Ratios (SNRs) Generate an instance of through the uniform distribution . This distribution models the bounded random fluctuations in the channel conditions. Generate the signal-to-noise ratios and using an exponential distribution with the parameter , aligning with the Rayleigh fading model theoretically. 1.2 Generate , using the uniform distribution . This distribution represents the spatial randomness of the deployment of nodal ships within a pre-defined operational area. 1.3 Generate and using the normal distribution . This distribution is commonly applied in oceanography to modeling the variability in the wave heights under diverse sea conditions. 1.4 Generate , , and , using the uniform distribution , . These distributions capture the random characteristics of nodal ship movement while adhering to environmental and operational limitations. 1.5 Pack data Repeat steps 1.1 to 1.4 for a total of 20,000 iterations. Reorganize all the data and package them into , where is the data used for training the model, and is the data for prediction. Step 2: Output Data Generation 2.1 Use the Monte Carlo method to compute the connection probability for . The computed result is packaged into , where is the connection probability for the training data, and is the connection probability for the prediction data. Step 3: Predict the Connection Probability 3.1 Package the training datasets and train the network. 3.2 Feed input into the network to derive the predicted output . 3.3 Compare with to calculate the error. |
5. The Experimental Results and Evaluation Metrics
5.1. The Experimental Environment
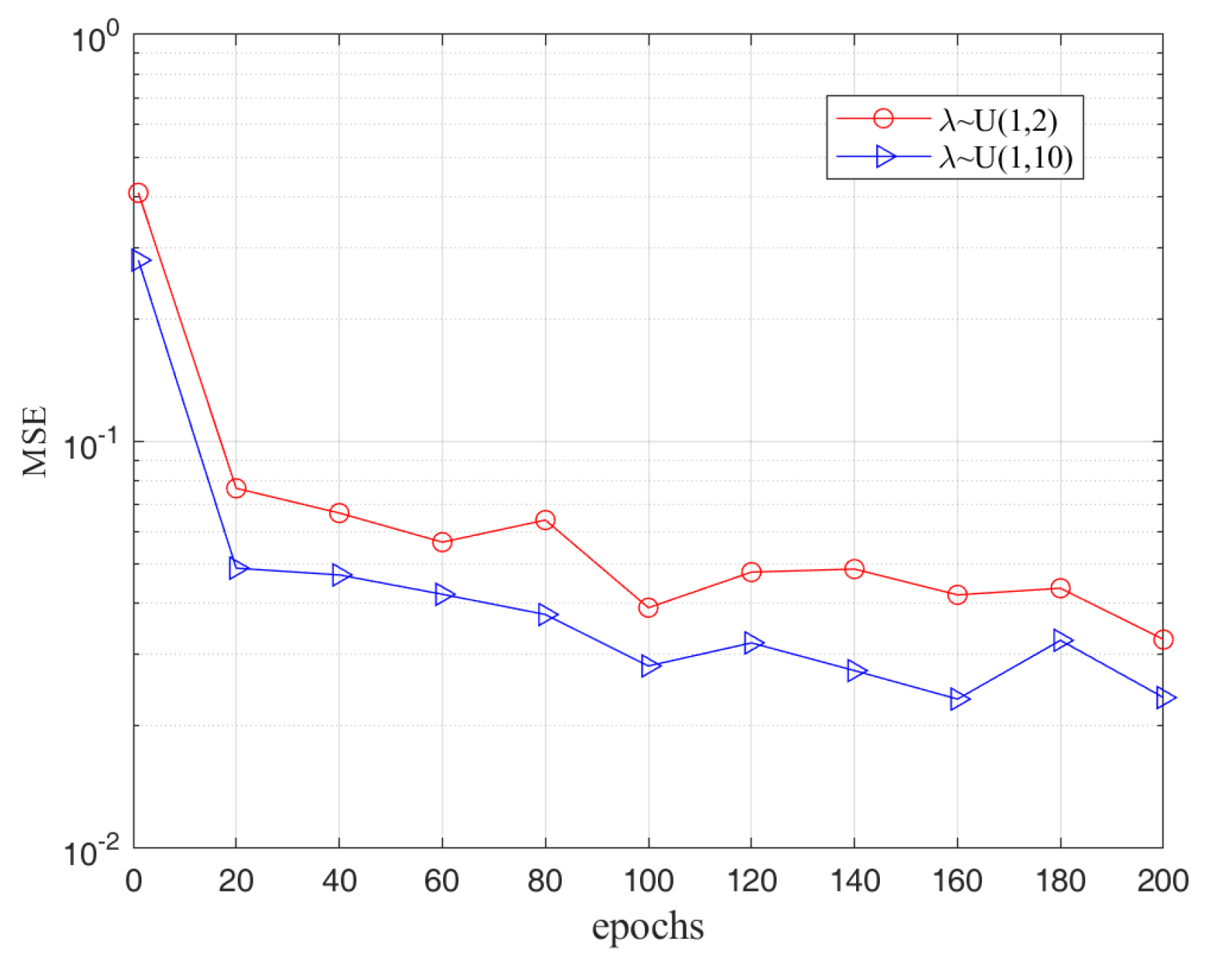
5.2. Analysis of the Results
5.3. Model Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brodnevs, D.; Bezdel, A. High—Reliability low—Latency cellular network communication solution for static or moving ground equipment control. In Proceedings of the 2017 IEEE 58th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 12–13 October 2017; pp. 1–6. [Google Scholar]
- Jiang, S. Marine Internet for Internetworking in Oceans: A Tutorial. Future Internet 2019, 11, 146. [Google Scholar] [CrossRef]
- Dhivvya, J.P.; Rao, S.N.; Simi, S. Analysis of optimal backhaul link selection in a novel maritime communication network. In Proceedings of the 2017 International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 22–24 March 2017; pp. 101–106. [Google Scholar]
- Li, J.; Yang, T.; Feng, H. Intelligent Maritime Communications Enabled by Deep Reinforcement Learning. In Proceedings of the 2019 IEEE/CIC International Conference on Communications in China (ICCC), Changchun, China, 11–13 August 2019; pp. 786–791. [Google Scholar]
- Pendyala, V.S.; Patil, M. Multi-Link Prediction for mmWave Wireless Communication Systems Using Liquid Time-Constant Networks, Long Short-Term Memory, and Interpretation Using Symbolic Regression. Electronics 2024, 13, 2736. [Google Scholar] [CrossRef]
- Sun, W.; Li, P.; Liu, Z.; Xue, X.; Li, Q.; Zhang, H.; Wang, J. LSTM based link quality confidence interval boundary prediction for wireless communication in smart grid. Computing 2021, 103, 251–269. [Google Scholar]
- Liu, L.; Lv, H.; Xu, J.; Shu, J. A Link Quality Estimation Method Based on Improved Weighted Extreme Learning Machine. Qual. Control. Trans. 2021, 9, 11378–11392. [Google Scholar]
- Xu, W.; An, J.; Xu, Y.; Huang, C.; Gan, L.; Yuen, C. Time-Varying Channel Prediction for RIS-Assisted MU-MISO Networks via Deep Learning. IEEE Trans. Cogn. Commun. Netw. 2022, 8, 1802–1815. [Google Scholar]
- Okdem, S.; Shi, H. A Real-Time Link Quality Estimation Method for IEEE 802.15.4 Based Wireless Sensor Network and IoT Devices. In Proceedings of the 2023 International Wireless Communications and Mobile Computing (IWCMC), Marrakesh, Morocco, 19–23 June 2023; pp. 1–6. [Google Scholar]
- Deng, Q. Applying Recurrent Neural Networks to Time-Series Analysis in Big Data for Decision Support. In Proceedings of the 2024 IEEE 4th International Conference on Data Science and Computer Application (ICDSCA), Dalian, China, 22–24 November 2024; pp. 171–175. [Google Scholar]
- Sinha, S.; Kwon, S.Y.; Park, S.H. A Survey of Deep/Machine Learning in Maritime Communications. In Proceedings of the 2023 Fourteenth International Conference on Ubiquitous and Future Networks (ICUFN), Paris, France, 4–7 July 2023; pp. 856–860. [Google Scholar]
- El-Banna, A.A.A.; ElHalawany, B.M.; Zaky, A.B.; Huang, J.Z.; Wu, K. Machine learning-based multi-layer multi-hop transmission scheme for dense networks. IEEE Commun. Lett. 2019, 23, 2238–2242. [Google Scholar]
- Rasheed, I.; Asif, M.; Ihsan, A.; Khan, W.U.; Ahmed, M.; Rabie, K.M. LSTM-based distributed conditional generative adversarial network for data-driven 5G-enabled maritime UAV communications. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2431–2446. [Google Scholar]
- Rathika, M.; Sivakumar, P. Machine learning-optimized relay selection method for mitigating interference in next generation communication networks. Wirel. Netw. 2023, 29, 1969–1981. [Google Scholar] [CrossRef]
- Liu, K.; Li, P.; Liu, C.; Xiao, L.; Jia, L. UAV-Aided Anti-Jamming Maritime Communications: A Deep Reinforcement Learning Approach. In Proceedings of the 2021 13th International Conference on Wireless Communications and Signal Processing (WCSP), Changsha, China, 20–22 October 2021; pp. 1–6. [Google Scholar]
- Ge, L.; Jiang, S.; Wang, X.; Xu, Y.; Feng, R.; Zheng, Z. Link availability prediction based on machine learning for opportunistic networks in oceans. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2022, E105.A, 598–602. [Google Scholar]
- Thong, N.T.; Quyet, N.V.; Giap, C.N.; Giang, N.L.; Lan, L.T.H. A Complex Fuzzy LSTM Network for Temporal-Related Forecasting Problems. Comput. Mater. Contin. 2024, 80, 4173–4196. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, Y. Robust receive beamforming and reflection coefficients optimization in an IRS-aided decode-and-forward relay system. Electron. Lett. 2024, 60, 4. [Google Scholar]
- Lu, X.Q.; Tian, J.; Liao, Q.; Xu, Z.W.; Gan, L. CNN-LSTM based incremental attention mechanism enabled phase-space reconstruction for chaotic time series prediction. J. Electron. Sci. Technol. 2024, 22, 77–90. [Google Scholar]
- Chen, H.Y.; Wu, M.H.; Yang, T.W.; Huang, C.W.; Chou, C.F. Attention-Aided Autoencoder-Based Channel Prediction for Intelligent Reflecting Surface-Assisted Millimeter-Wave Communications. IEEE Trans. Green Commun. Netw. 2023, 4, 7. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, L. Selecting and Composing Learning Rate Policies for Deep Neural Networks. ACM Trans. Intell. Syst. Technol. 2023, 14, 22.1–22.25. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Parameter | Value |
|---|---|---|
| Marine communication | Maximum sea wave height | 2 m |
| Average sea wave height | 1.5 m | |
| Transmitter and receiver | Transmission power | 15–30 dBm |
| Carrier frequency | 5.8 GHz | |
| Transmit antenna height | 12 m | |
| Receive antenna height | 8 m | |
| Sound power | 2–4 dBm | |
| Ship movement | Sampling interval | 120 s |
| Distance | 10–20 km | |
| Speed | km/h | |
| Direction |
| Parameter | Value | |
|---|---|---|
| Input layer | Number of nodes | 20K × 10 |
| CNN layer | Filter 1: size/number/stride | 3/6/1 |
| Filter 2: size/number/stride | 3/12/1 | |
| Filter 3: size/number/stride | 3/32/1 | |
| Filter 4: size/number/stride | 3/64/1 | |
| Pooling type/kernel size/stride | AveragePooling/2/1 | |
| Activation function | ReLU | |
| BiLSTM layer | Number of LSTM units (forward) | 32 |
| Number of LSTM units (backward) | 32 | |
| Dropout parameter | 0.2 | |
| Attention layer | Activation function | Softmax |
| Output layer | Number of nodes | 20K × 1 |
| Hyperparameters | Optimizer | Adam |
| Batch size | 32 | |
| Epochs | 200 | |
| Learning rate | 0.01 |
| Method | MSE (10−2) | MAE (10−2) | R2 (%) | Inference Time (s) |
|---|---|---|---|---|
| CNN | 22.49 | 45.12 | 87.24 | 34 |
| BiLSTM | 10.13 | 29.78 | 95.13 | 90 |
| CNN-BiLSTM-AM | 1.26 | 10.23 | 97.98 | 101 |
| Method | MSE (10−2) | MAE (10−2) | R2 (%) | Inference Time (s) |
|---|---|---|---|---|
| SVM | 41.27 | 62.20 | 78.61 | 15 |
| CNN-RNN | 8.39 | 25.97 | 96.95 | 75 |
| CNN-GRU | 6.47 | 23.44 | 97.04 | 83 |
| CNN-BiLSTM-AM | 1.26 | 10.23 | 97.98 | 101 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, S.; Wang, X. Analysis of Maritime Wireless Communication Connectivity Based on CNN-BiLSTM-AM. Electronics 2025, 14, 1367. https://doi.org/10.3390/electronics14071367
Cheng S, Wang X. Analysis of Maritime Wireless Communication Connectivity Based on CNN-BiLSTM-AM. Electronics. 2025; 14(7):1367. https://doi.org/10.3390/electronics14071367
Chicago/Turabian StyleCheng, Shuxian, and Xiaowei Wang. 2025. "Analysis of Maritime Wireless Communication Connectivity Based on CNN-BiLSTM-AM" Electronics 14, no. 7: 1367. https://doi.org/10.3390/electronics14071367
APA StyleCheng, S., & Wang, X. (2025). Analysis of Maritime Wireless Communication Connectivity Based on CNN-BiLSTM-AM. Electronics, 14(7), 1367. https://doi.org/10.3390/electronics14071367