
Insights into Mosquito Behavior: Employing Visual Technology to Analyze Flight Trajectories and Patterns


Abstract
1. Introduction
- A motion target detection approach based on background subtraction: By constructing an updated adaptive background model, it accurately isolates foreground objects from complex backdrops, thereby enhancing detection robustness and precision.
- A multi-target tracking algorithm integrating the Kalman filter prediction and the Hungarian algorithm-based data association: For each camera view, targets are tracked using a fusion of the Kalman filter and the Hungarian algorithm, ensuring continuous target identities across consecutive frames via state prediction and optimal matching, thus providing reliable and stable multi-object tracking.
- A stereoscopic 3D trajectory reconstruction scheme tailored to small objects such as mosquitoes: By merging the two-dimensional detections from different viewpoints to calculate three-dimensional coordinates, this method reconstructs the authentic flight paths of the targets, overcoming the constraints of traditional 2D analysis and offering a more intuitive perspective for mosquito behavior research.
2. Related Works
2.1. Background Subtraction Algorithm
2.2. Multiple Object Tracking
2.3. Three-Dimensional Trajectory Reconstruction
3. Methodology
3.1. Background Subtraction Based on K-Nearest Neighbor
3.2. Target Tracking
3.3. Trajectory Screening and Three-Dimensional Reconstruction
4. Experiments
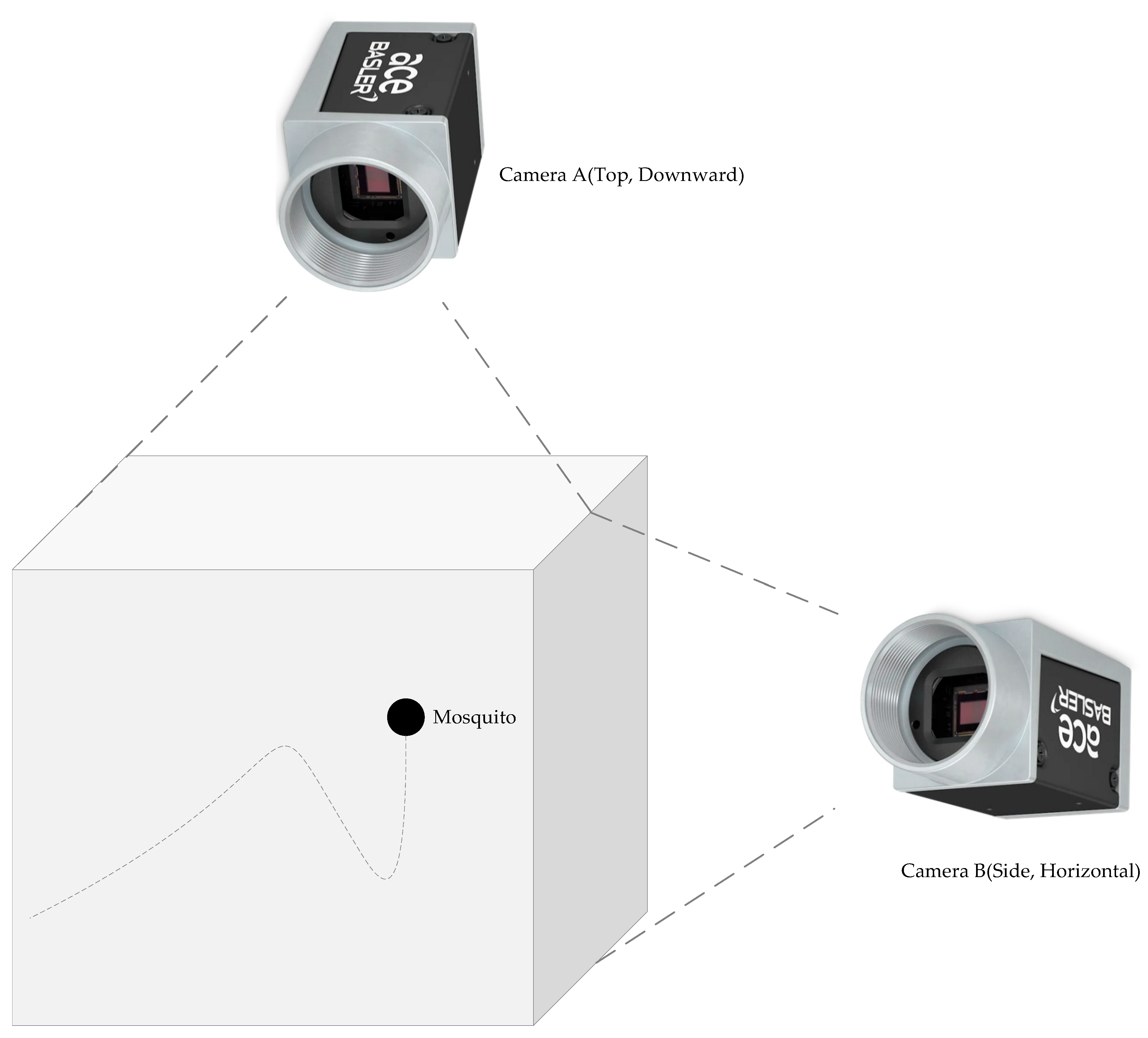
4.1. Experimental Setup
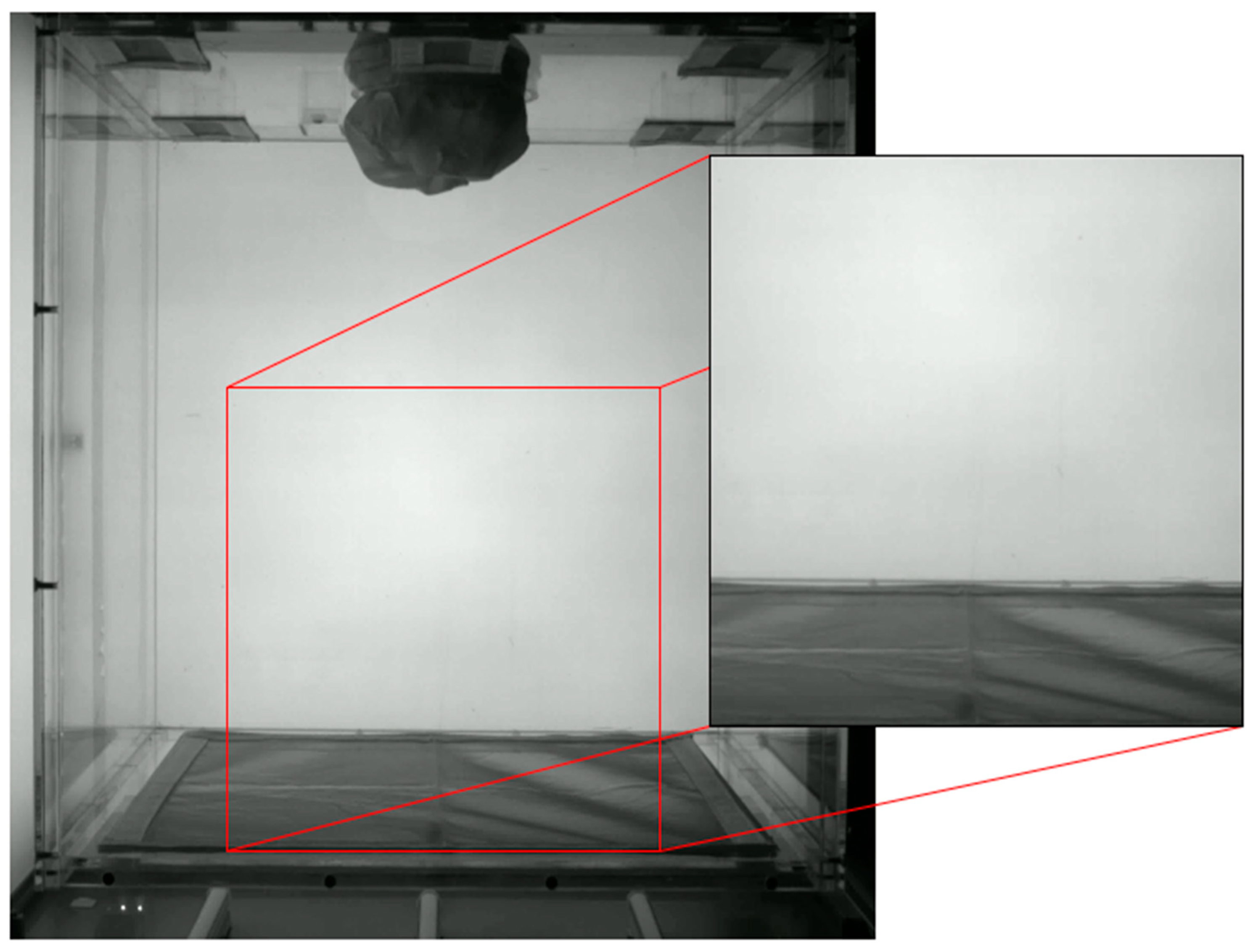
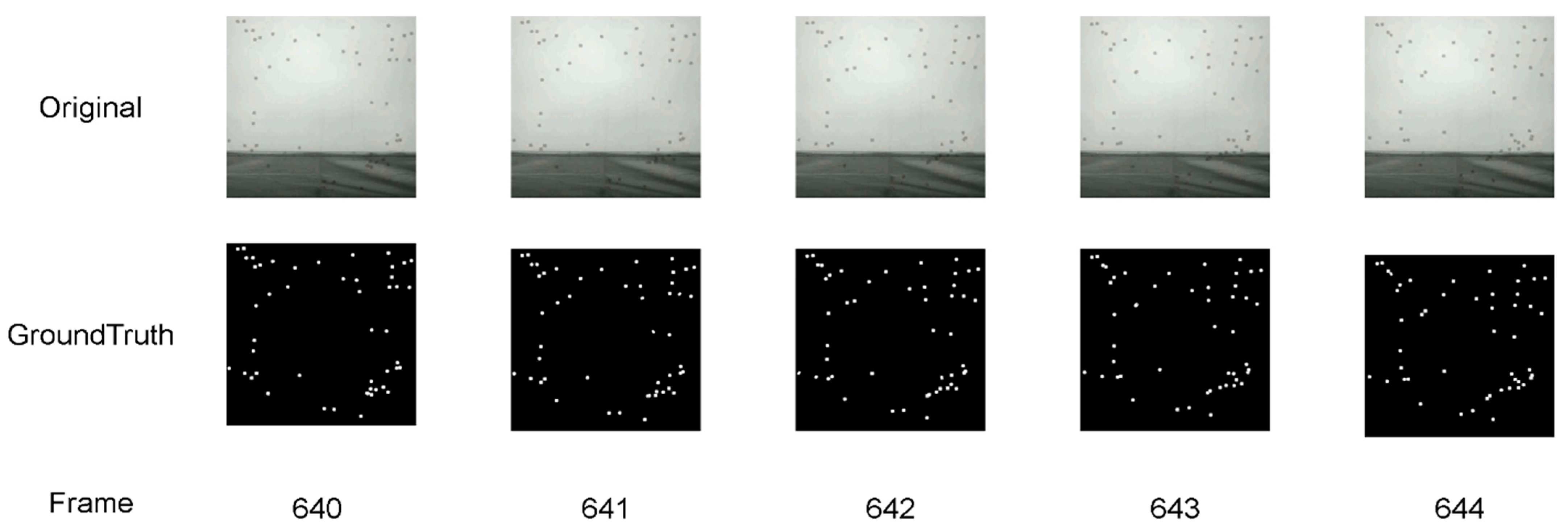
4.1.1. Experimental Scenario and Dataset Construction
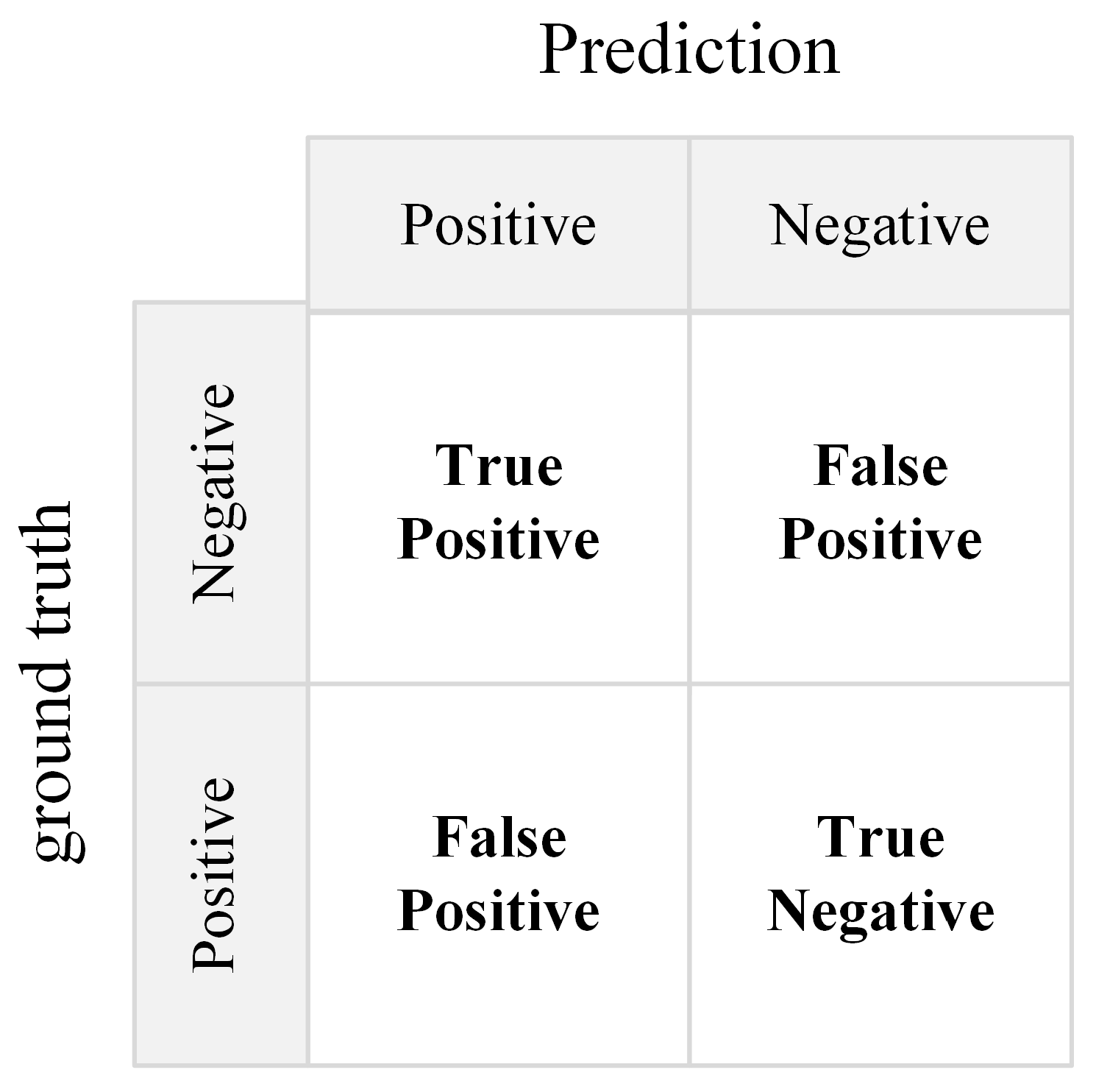
4.1.2. Experimental Metrics
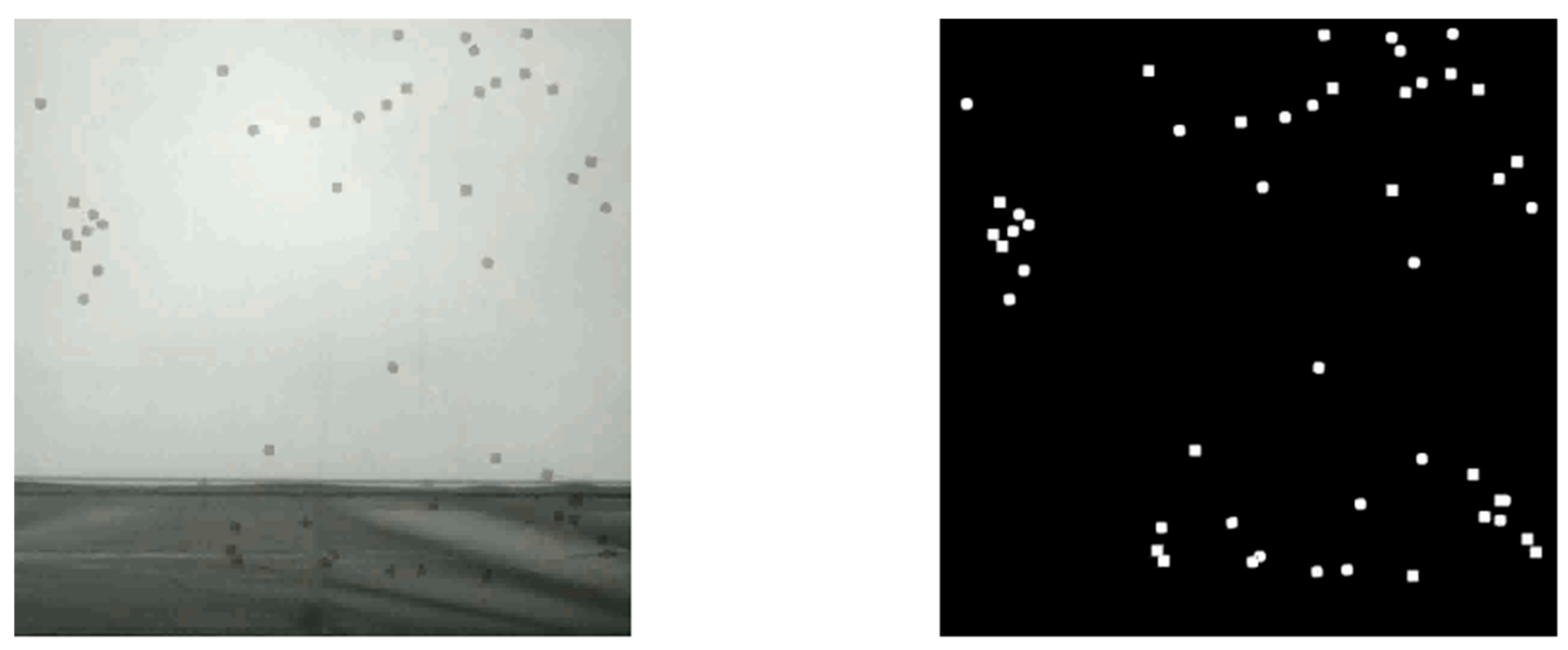
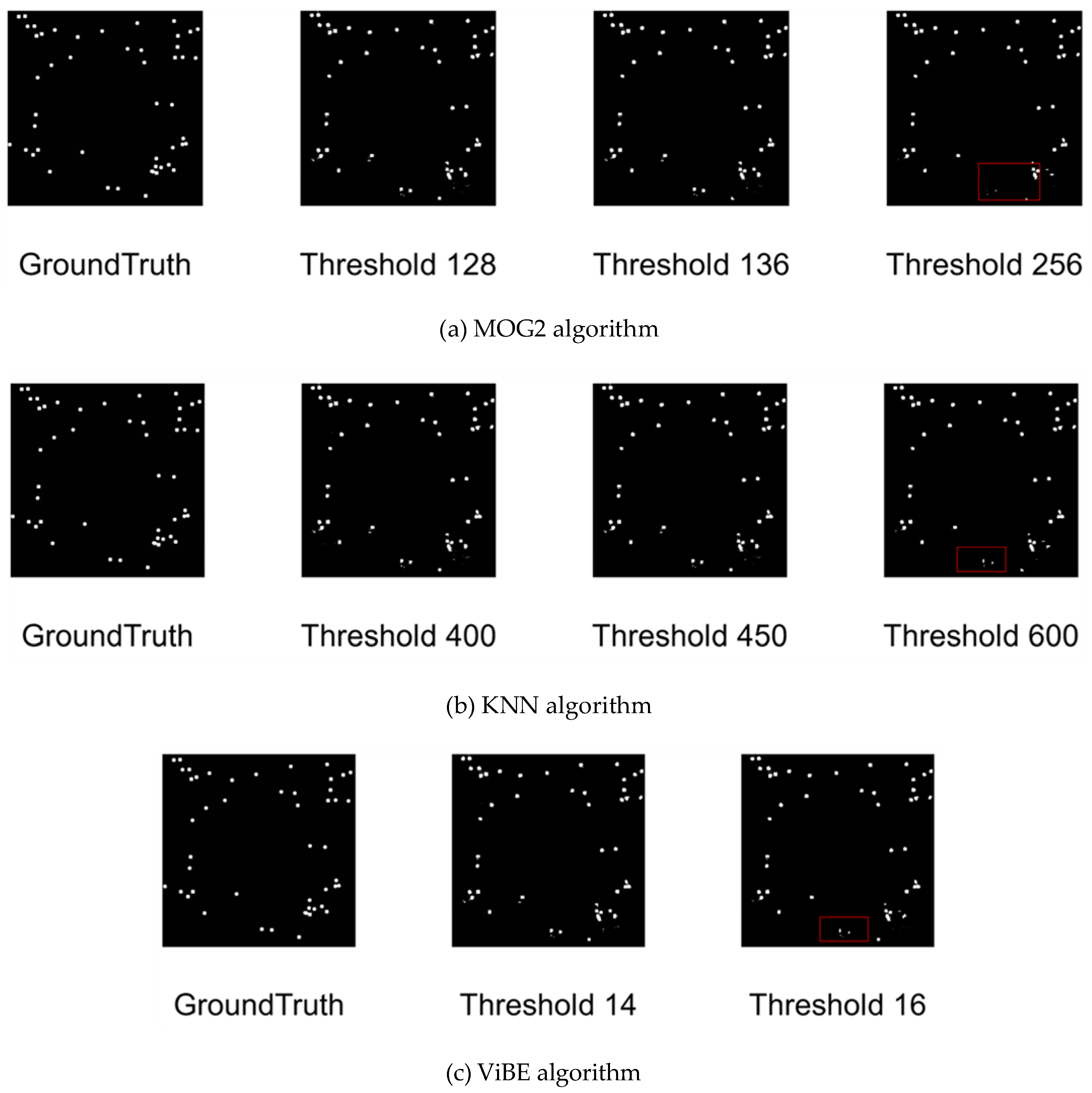
4.2. Performance Comparison of Background Subtraction Algorithms
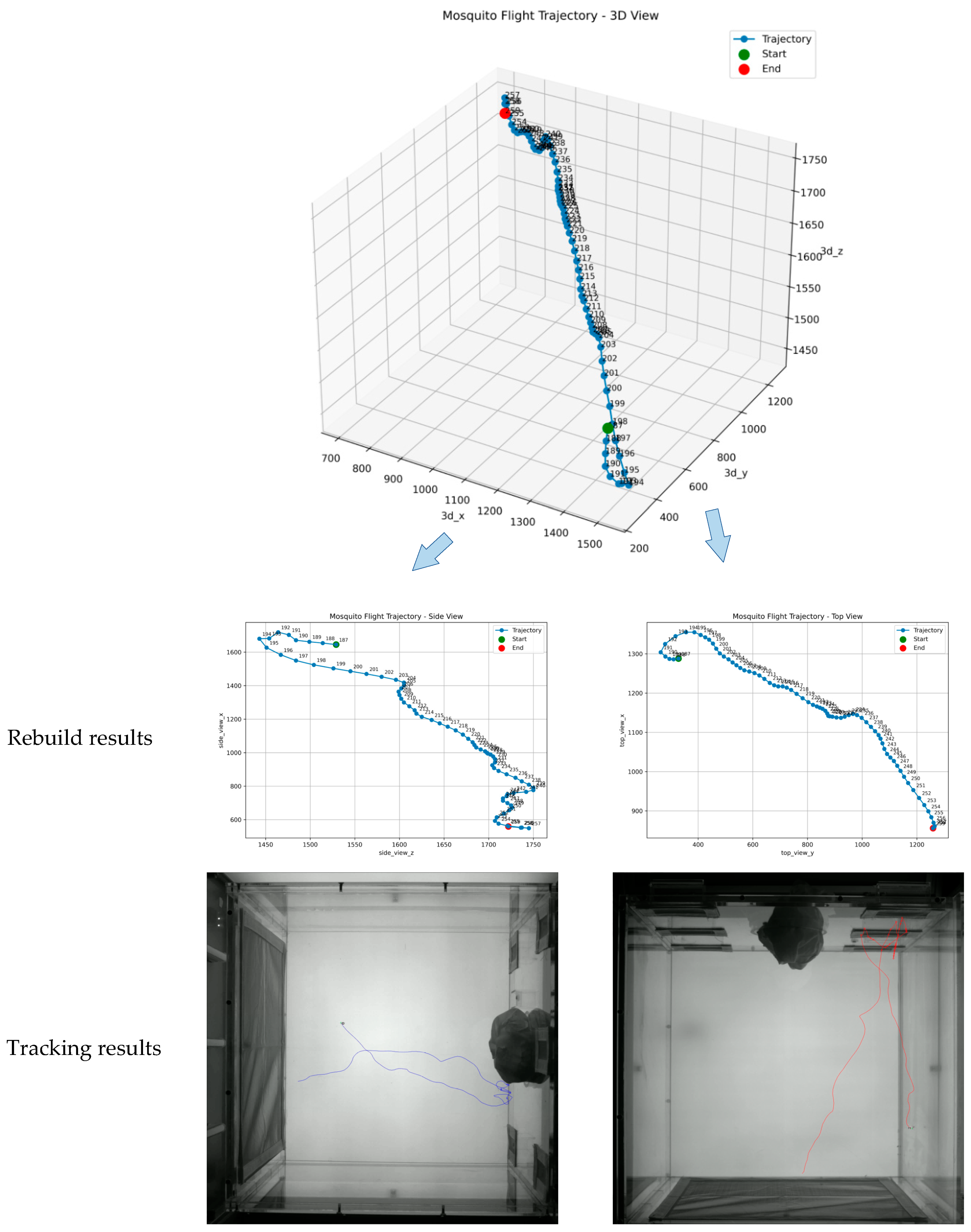
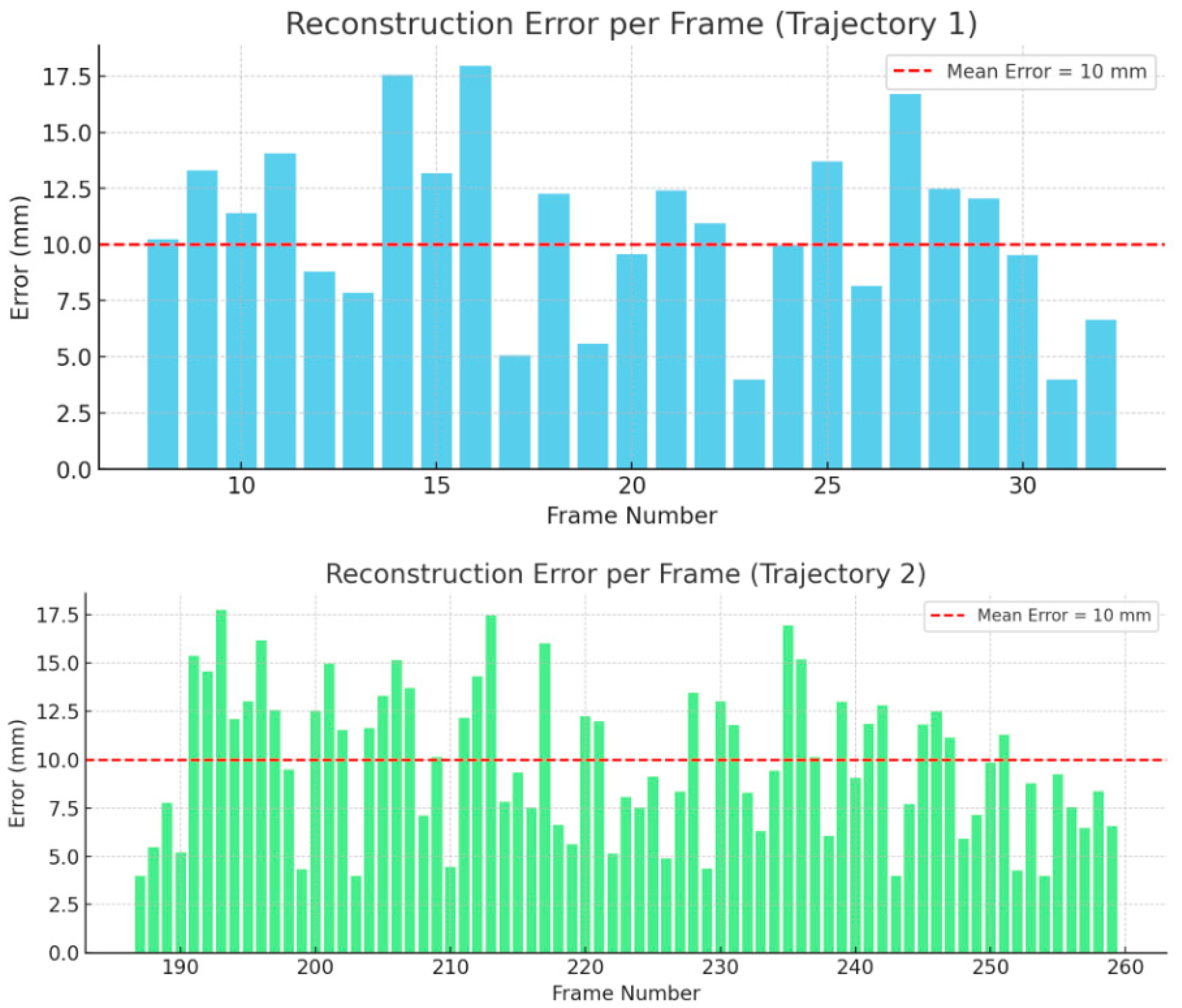
4.3. Trajectory Screening and 3D Trajectory Reconstruction for Dim-Point Mosquito Targets
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vaidya, N.K.; Wang, F.-B. Persistence of Mosquito Vector and Dengue: Impact of Seasonal and Diurnal Temperature Variations. Discret. Contin. Dyn. Syst.-B 2021, 27, 393–420. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Ren, X.; Liu, X. A periodic dengue model with diapause effect and control measures. Appl. Math. Model. 2022, 108, 469–488. [Google Scholar]
- Omari, G. Study of Effects of Plasmodium Infections on the Lifespan of Female Anopheles Mosquitoes. Master’s Thesis, Harvard University, Cambridge, MA, USA, 2018. [Google Scholar]
- Dragovic, S.M.; Agunbiade, T.A.; Freudzon, M.; Yang, J.; Hastings, A.K.; Schleicher, T.R.; Zhou, X.; Craft, S.; Chuang, Y.M.; Gonzalez, F.; et al. Immunization with AgTRIO, a Protein in Anopheles Saliva, Contributes to Protection against Plasmodium Infection in Mice. Cell Host Microbe 2018, 23, 523–553. [Google Scholar] [CrossRef] [PubMed]
- Jeong, C.; Song, J.S.; Kim-Jeon, M.D.; Kim, K.H.; Lee, J.G.; Lee, S.M. Molecular survey of Dirofilaria immitis in mosquitoes collected from parks the in the Incheon metropolitan city in Korea. Korean J. Vet. Serv. 2020, 43, 1–6. [Google Scholar]
- Şuleşco, T.; Volkova, T.; Yashkova, S.; Tomazatos, A.; von Thien, H.; Lühken, R.; Tannich, E. Detection of Dirofilaria repens and Dirofilaria immitis DNA in mosquitoes from Belarus. Parasitol. Res. 2016, 115, 3677. [Google Scholar] [PubMed]
- Vo-Doan, T.T.; Straw, A.D. Videography using a fast lock on, gimbal-mounted tracking camera to study animal communication. In Integrative and Comparative Biology; Oxford Univ Press Inc.: Cary, NC, USA, 2001; Volume 61, p. E949. [Google Scholar]
- Javed, N.; Paradkar, P.N.; Bhatti, A. Flight behaviour monitoring and quantification of aedes aegypti using convolution neural network. PLoS ONE 2023, 18, e0284819. [Google Scholar]
- Wang, J.T.; Bu, Y. Internet of Things-based smart insect monitoring system using a deep neural network. IET Netw. 2022, 11, 245–256. [Google Scholar]
- Spitzen, J.; Spoor, C.W.; Grieco, F.; ter Braak, C.; Beeuwkes, J.; van Brugge, S.P.; Kranenbarg, S.; Noldus, L.P.J.J.; van Leeuwen, J.L.; Takken, W. A 3D analysis of flight behavior of Anopheles gambiae sensu stricto malaria mosquitoes in response to human odor and heat. PLoS ONE 2013, 8, e62995. [Google Scholar]
- Spitzen, J.; Takken, W. Keeping track of mosquitoes: A review of tools to track, record and analyse mosquito flight. Parasites Vectors 2018, 11, 1–11. [Google Scholar]
- Zivkovic, Z. Improved adaptive Gaussian mixture model for background subtraction. In Proceedings of the 17th International Conference on Pattern Recognition, 2004. ICPR 2004, Cambridge, UK, 26 August 2004; Volume 2, pp. 28–31. [Google Scholar]
- Barnich, O.; Van Droogenbroeck, M. ViBe: A universal background subtraction algorithm for video sequences. IEEE Trans. Image Process. 2010, 20, 1709–1724. [Google Scholar] [PubMed]
- Zivkovic, Z.; Van Der Heijden, F. Efficient adaptive density estimation per image pixel for the task of background subtraction. Pattern Recognit. Lett. 2006, 27, 773–780. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 1995. [Google Scholar]
- Chen, X.; Wang, X.; Xuan, J. Tracking multiple moving objects using unscented Kalman filtering techniques. arXiv 2018, arXiv:1802.01235. [Google Scholar]
- Straw, A.D.; Pieters, R.; Muijres, F.T. Real-Time Tracking of Multiple Moving Mosquitoes. Cold Spring Harb. Protoc. 2022, 2023, 117–120. [Google Scholar] [CrossRef] [PubMed]
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 3645–3649. [Google Scholar]
- Bewley, A.; Ge, Z.; Ott, L.; Ramos, F.; Upcroft, B. Simple online and realtime tracking. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3464–3468. [Google Scholar]
- Kuhn, H.W. The Hungarian method for the assignment problem. Nav. Res. Logist. Q. 1955, 2, 83–97. [Google Scholar] [CrossRef]
- Khan, B.; Gaburro, J.; Hanoun, S.; Duchemin, J.B.; Nahavandi, S.; Bhatti, A. Activity and flight trajectory monitoring of mosquito colonies for automated behaviour analysis. In Neural Information Processing: 22nd International Conference, ICONIP 2015, November 9–12, 2015, Proceedings, Part IV 22; Springer International Publishing: Cham, Switzerland, 2015; pp. 548–555. [Google Scholar]
- Cheng, X.E.; Wang, S.H.; Qian, Z.M.; Chen, Y.Q. Estimating Orientation of Flying Fruit Flies. PLoS ONE 2015, 10, e0132101. [Google Scholar]
- Cheng, X.E.; Qian, Z.M.; Wang, S.H.; Jiang, N.; Guo, A.; Chen, Y.Q. A novel method for tracking individuals of fruit fly swarms flying in a laboratory flight arena. PLoS ONE 2015, 10, e0129657. [Google Scholar]
- Yang, B.; Nevatia, R. Multi-target tracking by online learning of non-linear motion patterns and robust appearance models. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1918–1925. [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part I. Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Reece, S.; Roberts, S. The near constant acceleration Gaussian process kernel for tracking. IEEE Signal Process. Lett. 2010, 17, 707–710. [Google Scholar]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Precision | Accuracy | Recall | F1-Score |
|---|---|---|---|---|
| MOG2 | 0.9167 | 0.9167 | 0.9507 | 0.9334 |
| KNN | 0.9106 | 0.9335 | 0.9456 | 0.9297 |
| ViBe | 0.9068 | 0.9308 | 0.9483 | 0.9270 |
| Frame | xv | yv | xh | yh | x | y | z |
|---|---|---|---|---|---|---|---|
| 8 | 1402 | 1404 | 352 | 1622 | 877 | 1404 | 1622 |
| 9 | 1403 | 1415 | 334 | 1621 | 869 | 1415 | 1621 |
| 10 | 1405 | 1425 | 317 | 1622 | 861 | 1425 | 1622 |
| 11 | 1412 | 1436 | 301 | 1621 | 857 | 1436 | 1621 |
| … | … | … | … | … | … | … | … |
| 27 | 1554 | 1508 | 165 | 1701 | 860 | 1508 | 1701 |
| 28 | 1562 | 1517 | 160 | 1719 | 861 | 1517 | 1719 |
| 29 | 1571 | 1530 | 156 | 1738 | 864 | 1530 | 1738 |
| 30 | 1582 | 1535 | 151 | 1757 | 867 | 1535 | 1757 |
| 31 | 1596 | 1529 | 147 | 1743 | 872 | 1529 | 1743 |
| 32 | 1608 | 1521 | 152 | 1737 | 880 | 1521 | 1737 |
| Frame | xv | yv | xh | yh | x | y | z |
|---|---|---|---|---|---|---|---|
| 187 | 1288 | 328 | 1645 | 1529 | 1467 | 328 | 1529 |
| 188 | 1286 | 310 | 1654 | 1514 | 1470 | 310 | 1514 |
| 189 | 1287 | 295 | 1662 | 1499 | 1475 | 295 | 1499 |
| 190 | 293 | 280 | 1671 | 1484 | 1482 | 280 | 1484 |
| … | … | … | … | … | … | … | … |
| 254 | 899 | 1242 | 576 | 1711 | 738 | 1242 | 1711 |
| 255 | 884 | 1253 | 563 | 1721 | 724 | 1253 | 1721 |
| 256 | 870 | 1261 | 553 | 1737 | 712 | 1261 | 1737 |
| 257 | 861 | 1265 | 549 | 1745 | 705 | 1265 | 1745 |
| 258 | 859 | 1263 | 552 | 1736 | 706 | 1263 | 1736 |
| 259 | 856 | 1259 | 559 | 1722 | 708 | 1259 | 1722 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, N.; Wang, L.; Wang, K. Insights into Mosquito Behavior: Employing Visual Technology to Analyze Flight Trajectories and Patterns. Electronics 2025, 14, 1333. https://doi.org/10.3390/electronics14071333
Zhao N, Wang L, Wang K. Insights into Mosquito Behavior: Employing Visual Technology to Analyze Flight Trajectories and Patterns. Electronics. 2025; 14(7):1333. https://doi.org/10.3390/electronics14071333
Chicago/Turabian StyleZhao, Ning, Lifeng Wang, and Ke Wang. 2025. "Insights into Mosquito Behavior: Employing Visual Technology to Analyze Flight Trajectories and Patterns" Electronics 14, no. 7: 1333. https://doi.org/10.3390/electronics14071333
APA StyleZhao, N., Wang, L., & Wang, K. (2025). Insights into Mosquito Behavior: Employing Visual Technology to Analyze Flight Trajectories and Patterns. Electronics, 14(7), 1333. https://doi.org/10.3390/electronics14071333