
Fault Diagnosis Method for Sub-Module Open-Circuit Faults in Photovoltaic DC Collection Systems Based on CNN-LSTM

Abstract
1. Introduction
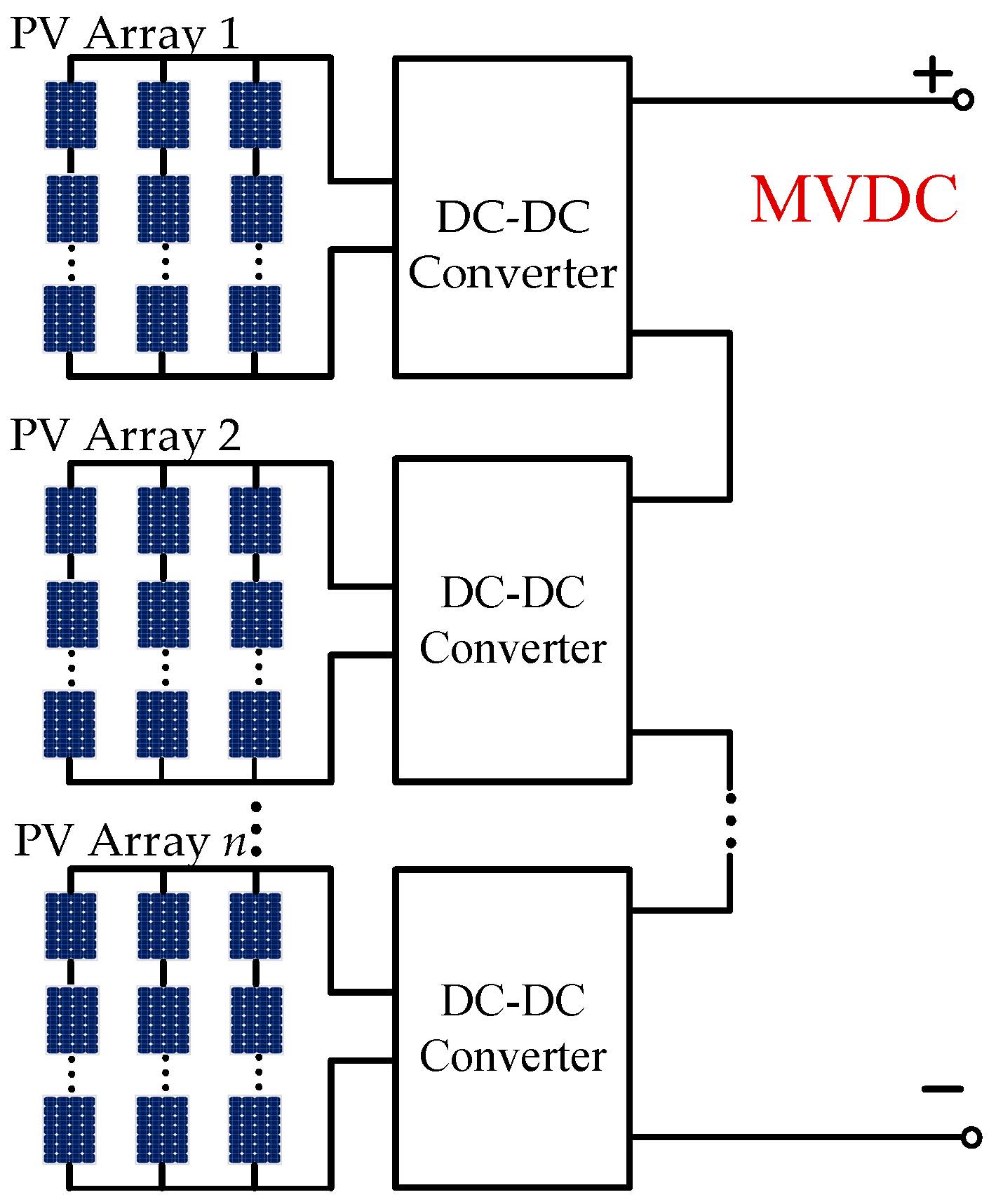
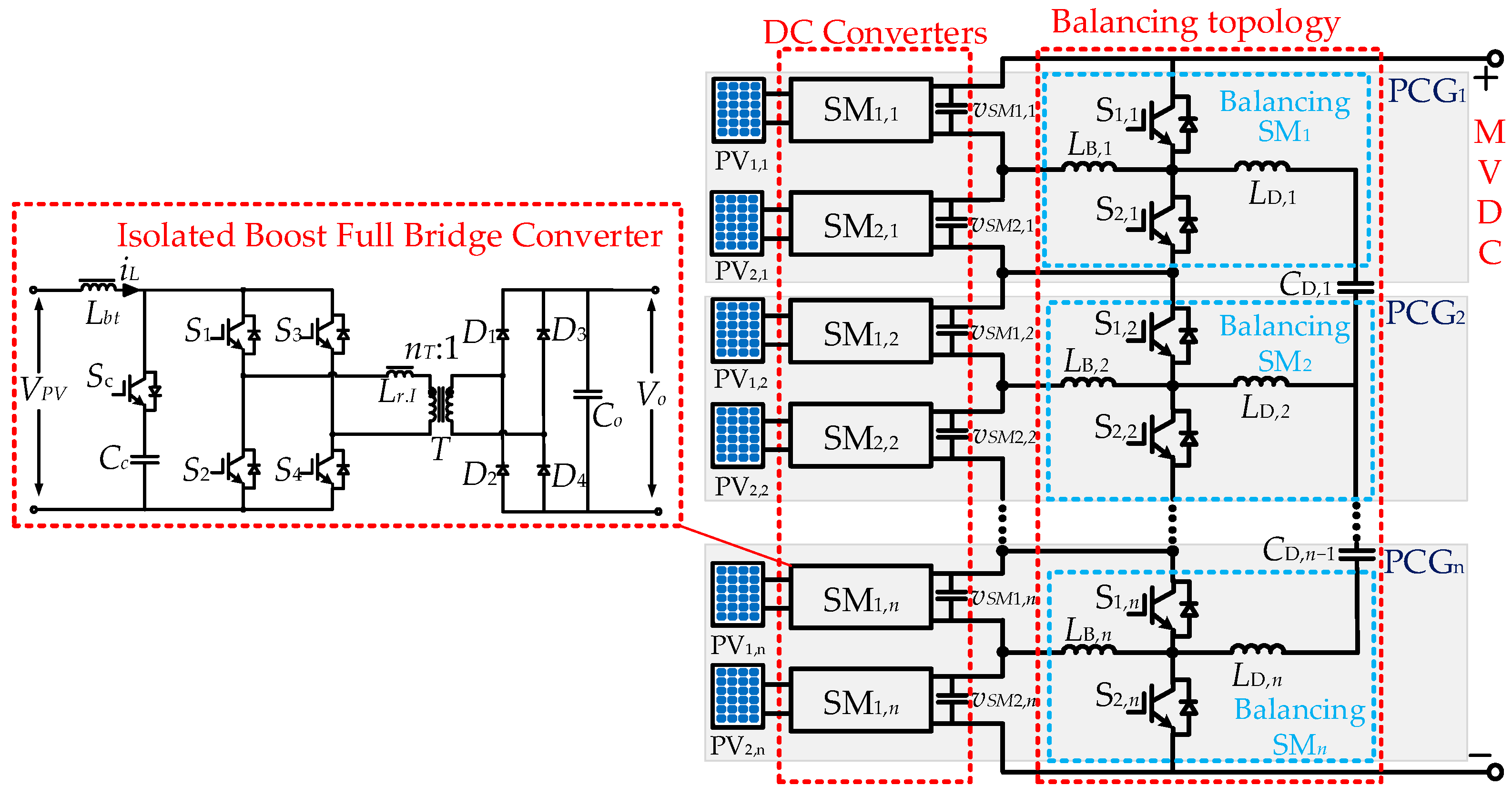
2. Principle of Operation and Fault Characteristics
2.1. Sub-Module Operation Principle
2.2. Sub-Module Fault Characteristics
3. Fault Diagnosis Method Based on CNN-LSTM
3.1. Principles of CNN-LSTM Model
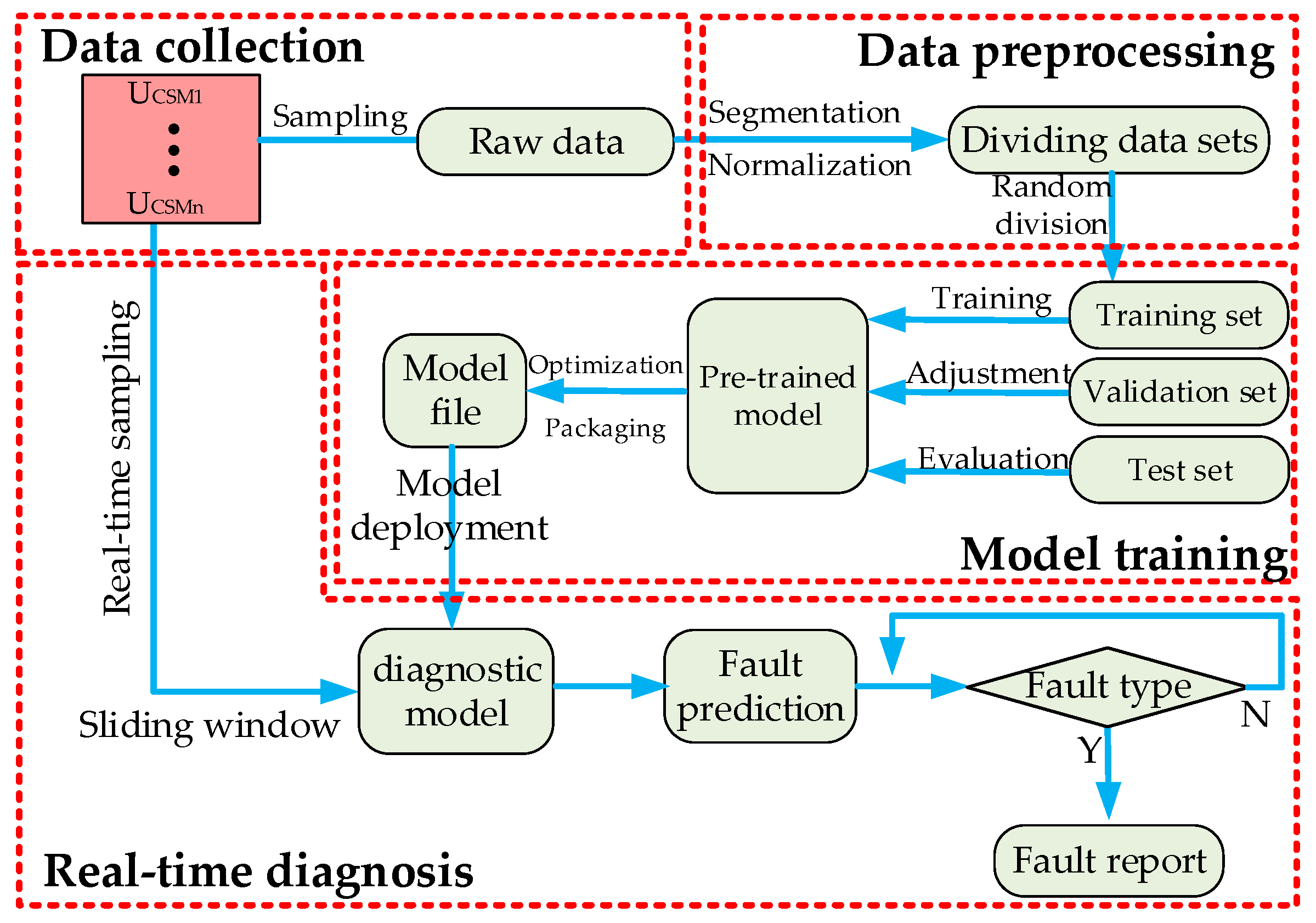
3.2. Fault Diagnosis Model Based on CNN-LSTM
3.2.1. Data Collection
3.2.2. Data Preprocessing
3.2.3. Model Training
4. Simulation and Experimental Verification
4.1. Simulation Verification
4.1.1. Diagnostic Accuracy Verification
4.1.2. Model Comparison Analysis
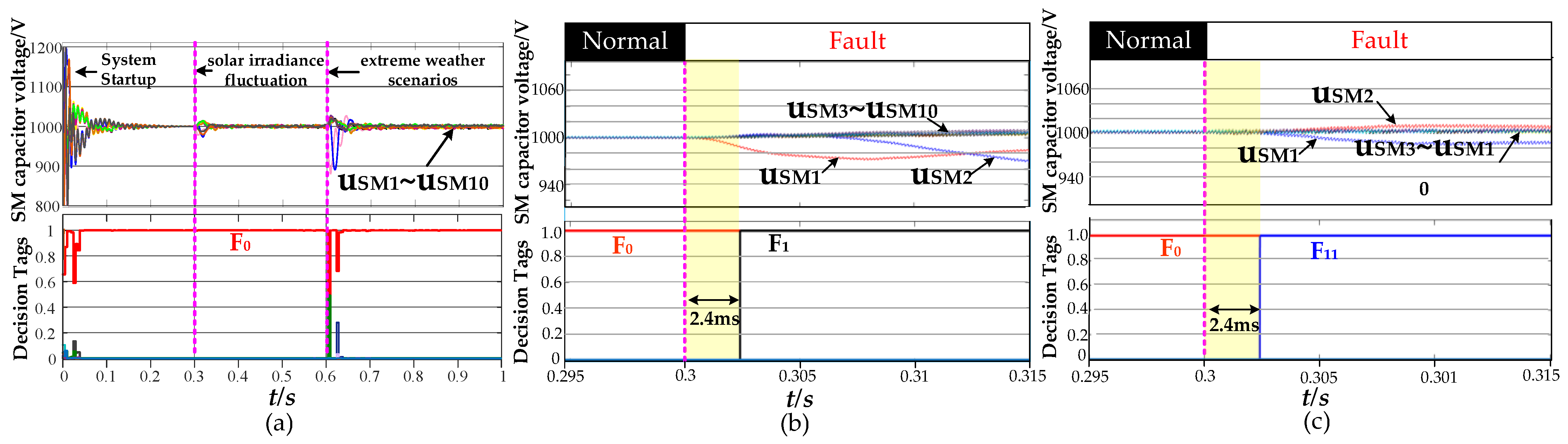
4.1.3. Real-Time Fault Diagnosis Verification
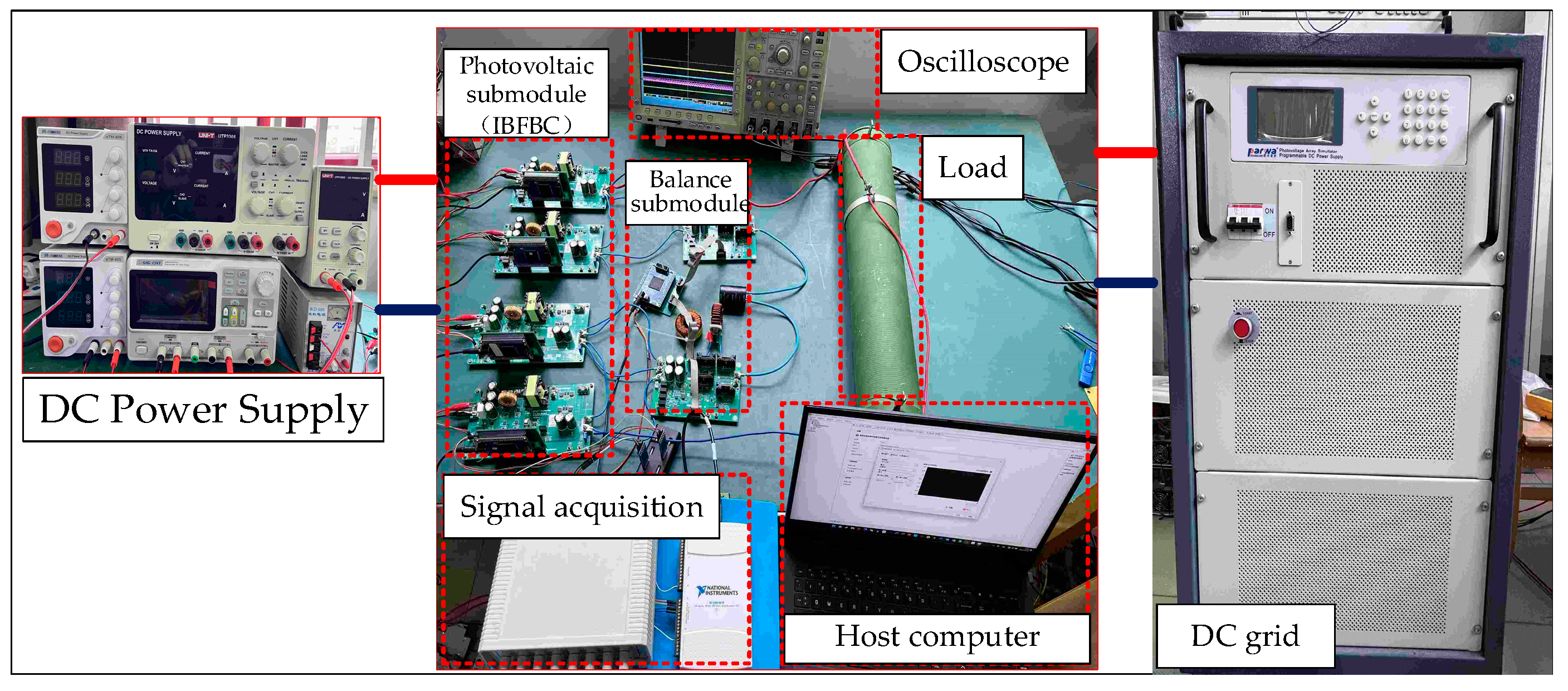
4.2. Experimental Verification
- Fluctuation of light intensity under normal operation.
- IBFBC-S1 open-circuit fault
- Balancing SM S1,1 open-circuit fault
5. Discussion
- The method automatically extracts local features through CNN and combines the capture of timing features by LSTM to realize efficient identification and localization of faults under complex working conditions. Simulation and experimental results confirm that the method has high diagnostic accuracy and robustness, and no obvious misdiagnosis occurs in complex environments such as light fluctuations.
- Compared with methods such as CNN, LSTM, and traditional SSAE-LSTM alone, the proposed CNN-LSTM model shows significant advantages in diagnostic accuracy, generalization performance and stability. Although the simple CNN model is faster in diagnosis, it lacks effective capture of temporal features and is prone to misclassification, while the simple LSTM model is difficult to effectively extract local features, which affects the classification accuracy. The CNN-LSTM model performs particularly well in the fault diagnosis scenarios with both local spatial and long-term temporal features, and it can handle the complex temporal data features caused by light fluctuations in PV systems more effectively. The LSTM model can more effectively deal with the complex temporal data features caused by light fluctuations in PV collection systems.
- However, this study still has some limitations. On the one hand, the computational complexity of the CNN-LSTM model is relatively high due to the combination of time-series feature extraction, resulting in a slightly longer response time for real-time diagnosis, which may have certain limitations in practical scenarios with stringent real-time requirements; on the other hand, although the data enhancement method is used to improve the robustness of the model, in the process of practical application, there may be more complex noise and interference factors, and the model’s robustness still needs to be further verified.
- For the risk of overfitting that may occur under large-scale and category imbalance data, this paper has used the Dropout layer and data enhancement methods to mitigate, but future research needs to further explore the data resampling strategy or other regularization techniques to ensure that the model still has a good generalization ability when the data scale is expanded.
- Future research should further optimize the CNN-LSTM model structure to reduce the computational load and improve the real-time response capability. At the same time, the combination of traditional diagnostic techniques or the introduction of advanced deep learning methods such as Attention Mechanism and Transformer can be explored to further improve the diagnostic accuracy and practicality of the model in complex operating environments. In addition, expanding the scale of the experimental dataset to cover more actual operating conditions can help to enhance the model generalization capability and reliability when actually deployed.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| IIOS | Input-independent output series |
| IPOS | Input-parallel output series |
| IBFBC | Isolated-boost full-bridge converter |
| PV | Photovoltaic |
| SM | Sub-module |
| MMC | Modular multilevel converter |
| CNN | Convolutional neural network |
| LSTM | Long short-term memory network |
| MPPT | Maximum power point tracking |
| SSAE | Stacked sparse auto encoder |
| PCG | Power converter group |
| OCF | Open-circuit fault |
References
- Zhuang, Y.Z.; Liu, F.; Huang, Y.H. A circular power balancing topology with efficiency optimization strategy for modular cascaded photovoltaic DC/DC converter. Autom. Electr. Power Syst. 2022, 45, 1657–1668. [Google Scholar]
- Kioni, N.; Hossein, D.T.; John, E.F.; Georgios, K. Impact of Grid Voltage and Grid-Supporting Functions on Efficiency of Single-Phase Photovoltaic Inverters. IEEE J. Photovolt. 2022, 12, 421–428. [Google Scholar]
- Ke, J.; Xuan, Z.W.; Chen, J.F. Control and protection coordination based identification strategy of DC fault for photovoltaic DC boosting integration system. Autom. Electr. Power Syst. 2019, 43, 134–141. [Google Scholar]
- Li, J.J.; Ma, X.; Xie, Y.F. Power and voltage balance control strategy of series input parallel output type three-level dual active bridge converter. Trans. China Electrotech. Soc. 2024, 39, 3082–3092. [Google Scholar]
- Li, X.Y.; Zhu, M.; Su, M.Z. Input-Independent and Output-Series Connected Modular DC–DC Converter with Intermodule Power Balancing Units for MVdc Integration of Distributed PV. IEEE Trans. Power Electron. 2020, 2, 1622–1636. [Google Scholar] [CrossRef]
- Huang, Y.H.; Liu, F.; Zhuang, Y.Z. Bidirectional Buck-Boost and Series LC-Based Power Balancing Units for Photovoltaic DC Collection System. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 6726–6738. [Google Scholar] [CrossRef]
- Tian, Y.J.; Gao, H.N.; Wang, Y. Voltage balance and current smoothing modulation for independent input serial output photovoltaic boost DC-DC converter control under uneven illumination. High Volt. Eng. 2020, 46, 2425–2433. [Google Scholar]
- Li, X.Y. Power Conversion Topology and Operation Strategy for DC PV Power Collection System. Ph.D. Thesis, Shanghai Jiaotong University, Shanghai, China, 2020. [Google Scholar]
- Zhu, L.Y. Research on the Topology and Control Strategy of Inpou-Independentand Output-Series Photovoltaic DC Boosting and Collection System. Master’s Thesis, Chongqing University, Chongqing, China, 2022. [Google Scholar]
- An, Y.; Sun, X.; Ren, B. Open-Circuit Fault Diagnosis for a Modular Multilevel Converter Based on Hybrid Machine Learning. IEEE Access 2024, 12, 61529–61541. [Google Scholar] [CrossRef]
- Bento, F.; Cardoso, A.J.M. A comprehensive survey on fault diagnosis and fault tolerance of DC-DC converters. Chin. J. Electr. Eng. 2018, 4, 1–12. [Google Scholar]
- Liu, C.K.; Deng, F.J.; Cai, X. Submodule open-circuit fault detection for modular multilevel converters under light load condition with rearranged bleeding resistor circuit. IEEE Trans. Power Electron. 2022, 37, 4600–4613. [Google Scholar] [CrossRef]
- Zhang, J.Z.; Hu, X.; Xu, S. Fault diagnosis and monitoring of modular multilevel converter with fast response of voltage sensors. IEEE Trans. Ind. Electron. 2020, 67, 5071–5080. [Google Scholar] [CrossRef]
- Zhou, D.H.; Qiu, H.; Yang, S.F. Submodule voltage similarity-based open-circuit fault diagnosis for modular multilevel converters. IEEE Trans. Power Electron. 2019, 34, 8008–8016. [Google Scholar] [CrossRef]
- Xu, K.S.; Xie, S.J. Diagnosis method for submodule failures in modular multilevel converter based on incremental predictive model. Proc. CSEE 2018, 38, 6420–6429. [Google Scholar]
- Wang, T.Z.; Xu, H.; Han, J.G. Cascaded H-bridge multilevel inverter system fault diagnosis using a PCA and mul ticlass relevance vector machine approach. IEEE Transac Tions Power Electron. 2015, 30, 7006–7018. [Google Scholar] [CrossRef]
- Han, Y.; Qi, W.; Ding, N. Short-time wavelet entropy integrating improved LSTM for fault diagnosis of modular multilevel converter. IEEE Trans. Cybern. 2021, 52, 7504–7512. [Google Scholar] [CrossRef] [PubMed]
- Aung, K.H.H.; Kok, C.L.; Koh, Y.Y.; Teo, T.H. An Embedded Machine Learning Fault Detection System for Electric Fan Drive. Electronics 2024, 13, 493. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Gastli, A.; Ben-Brahim, L. Real-time fault detection and identification for MMC using 1-D convolutional neural networks. IEEE Trans. Ind. Electron. 2018, 66, 8760–8771. [Google Scholar] [CrossRef]
- Yi, Q.X.; Duan, B.; Shen, M.J. Intelligent Diagnosis Method for Open-circuit Fault of Sub-modules in Modular Five-level Inverter. Autom. Electr. Power Syst. 2018, 42, 127–133. [Google Scholar]
- Jiang, X.S. Research on the Topology Theory and Control Technonogy of Isolated Boost Full Bridge DC-DC Converter. Ph.D. Thesis, Institute of Electrical Engineering of the Chinese Academy of Sciences, Beijing, China, 2006. [Google Scholar]
- Sun, C.J.; Zhu, M.; Zhang, X. Output-series modular DC–DC converter with self-voltage balancing for integrating variable energy sources. IEEE Trans. Power Electron. 2020, 35, 11321–11327. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Fan, Y.F.; Ma, J. Fault Diagnosis and Protection Strategy for Photovoltaic DC-DC Converter. Acta Energiae Solaris Sin. 2022, 43, 68–77. [Google Scholar]
- Wei, Z.T.; Liu, Y.B.; Shen, X.D.; Liu, J.Y. Ultra-short-term Power Generation Modeling and Prediction for Small Hydropower in Data-scarce Areas Based on Sample Data Transfer Learning. Proc. CSEE 2023, 43, 2652–2665. [Google Scholar]
- Zhao, Y.X.; Wang, X.; Jiang, C.W.; Zhang, J.H.; Zhou, Z.Q. A Novel Short-term Electricity Price Forecasting Method Based on Correlation Analysis with the Maximal Information Coefficient and Modified Multi-hierachy Gated LSTM. Proc. CSEE 2021, 41, 135–146. [Google Scholar]
- Li, Z.; Sun, W.; Xiang, Y. Transfer Strategy for Power Output Estimation of Wind Farm at Planning Stage Based on a SVR Model. CSEE J. Power Energy Syst. 2022, 9, 1460–1471. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Fault Type |
|---|---|
| F0 | Normal |
| F1~F10 | PV sub-modules (SM1-S1~SM10-S1) |
| F11~F20 | Balancing sub-modules (S1,1,S2,1~S1,5,S2,5) |
| Parameter | Simulation | Experiment |
|---|---|---|
| DC bus voltage (Vbus) | 10 kV | 160 V |
| Nominal power (PG) | 0.89 MW | 600 W |
| Number of PV-SM (n) | 10 | 4 |
| Number of Balancing SM (n) | 5 | 2 |
| Switching frequency (fs) | 1 kHz | 1 kHz |
| PV sub-module parameter | ||
| Boost inductor (LBoost) | 1 mH | 500 uH |
| High-frequency transformer ratio | 1:1 | 1:1 |
| Input capacitance (Cin) | 470 uF | 940 uF |
| Output capacitance (Co) | 1 mF | 940 uF |
| Power switches selection | 3300 V/400 A | BSC320N20NS3G |
| Balancing sub-module parameter | ||
| Balanced inductance in the group (LB) | 6 mH | 4 mH |
| Balanced inductance between groups (LD) | 50 uH | 100 uH |
| Capacitance between groups (CD) | 250 uF | 220 uF |
| Power switch selection | 4500 V/400 A | IRFP250N |
| Diagnostic Model | Accuracy (%) | F1 Score (%) | Diagnosis Time (ms) |
|---|---|---|---|
| CNN | 95.11 | 92.35 | 1.8 |
| CNN-LSTM | 99.63 | 98.64 | 2.4 |
| SSAE-LSTM | 89.91 | 86.62 | 7.2 |
| LSTM | 78.74 | 70.87 | 3.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, K.; Lu, Z.; Liu, P.; Mo, Z. Fault Diagnosis Method for Sub-Module Open-Circuit Faults in Photovoltaic DC Collection Systems Based on CNN-LSTM. Electronics 2025, 14, 1205. https://doi.org/10.3390/electronics14061205
Guo K, Lu Z, Liu P, Mo Z. Fault Diagnosis Method for Sub-Module Open-Circuit Faults in Photovoltaic DC Collection Systems Based on CNN-LSTM. Electronics. 2025; 14(6):1205. https://doi.org/10.3390/electronics14061205
Chicago/Turabian StyleGuo, Ke, Ziang Lu, Pengchao Liu, and Zhirong Mo. 2025. "Fault Diagnosis Method for Sub-Module Open-Circuit Faults in Photovoltaic DC Collection Systems Based on CNN-LSTM" Electronics 14, no. 6: 1205. https://doi.org/10.3390/electronics14061205
APA StyleGuo, K., Lu, Z., Liu, P., & Mo, Z. (2025). Fault Diagnosis Method for Sub-Module Open-Circuit Faults in Photovoltaic DC Collection Systems Based on CNN-LSTM. Electronics, 14(6), 1205. https://doi.org/10.3390/electronics14061205