
Finite Time ESO-Based Line-of-Sight Following Method with Multi-Objective Path Planning Applied on an Autonomous Marine Surface Vehicle


Abstract
1. Introduction
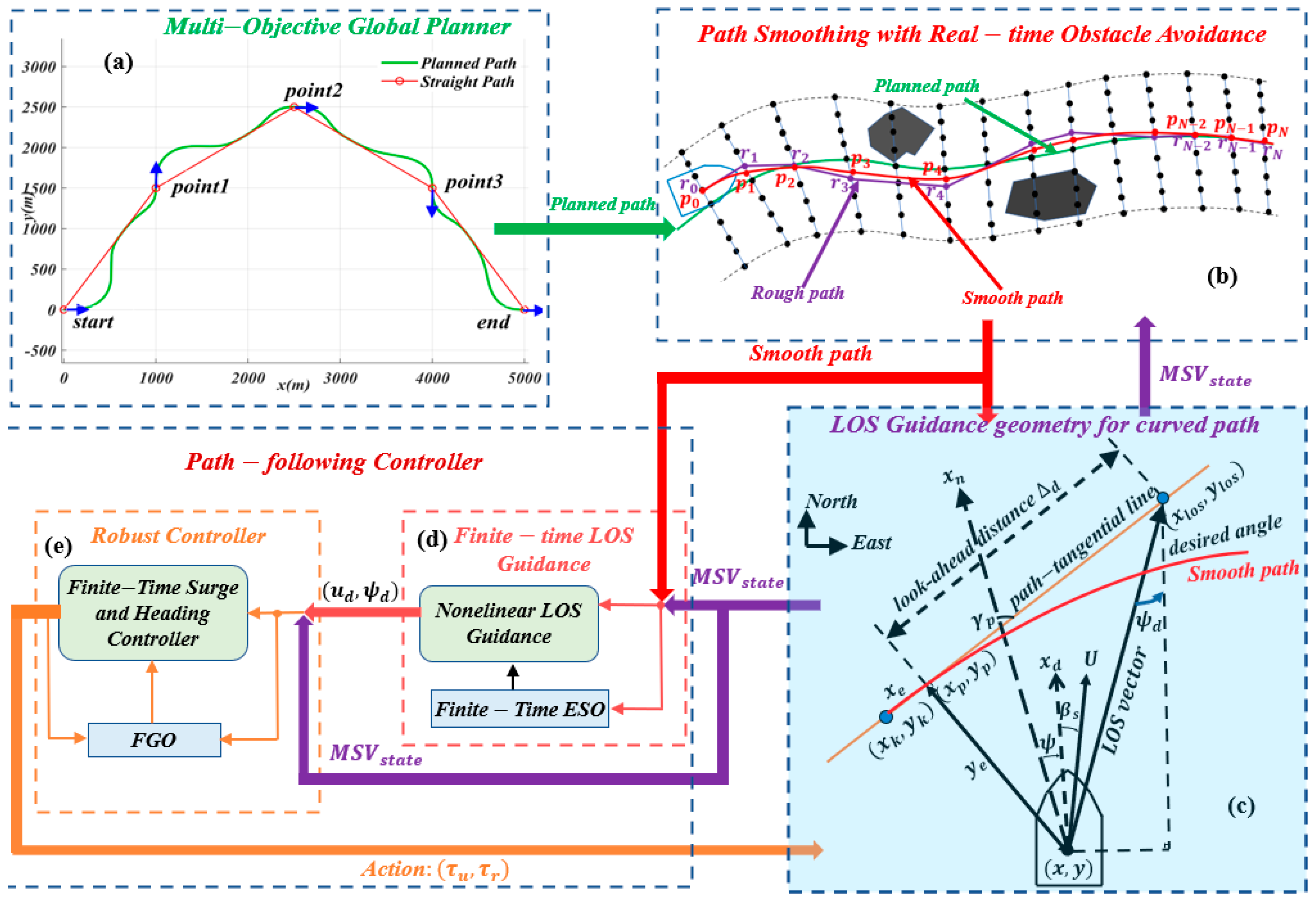
- A multi-objective spiral programming algorithm generates a continuous and sequential path that passes through all target points.
- An improved A* algorithm and an optimization algorithm are combined to perform global path planning and timely obstacle avoidance near the path.
- A finite-time ESO is constructed to estimate the time-varying unknown sideslip angle and a nonlinear feedback LOS-GDL is built to achieve finite-time convergence.
- A terminal sliding mode and a nonlinear DOB are used to build a surge course finite-time controller.
2. System Statement
2.1. Problem Formulation
2.2. Description of the AMSV Model
3. Path Planning and Smoothing
3.1. Spiral Path Planner
3.2. Path Smoothing
| Algorithm 1 Spiral Path Generator | |
| Input: | Target point sequence , where denotes the current position of the AMSV |
| Output: | A smooth reference path denoted by |
| 1. | Assign target orientation from to target point |
| 2. | for do |
| 3. | |
| 4. | end for |
| 5. | for do |
| 6. | Connect and to acquire a straight line |
| 7. | Calculate the coordinate of according to the yaw error from to : |
| 8. | Generate spiral path from to |
| 9. | Calculate the coordinate of according to the yaw error from to : |
| 10. | Generate spiral path from to |
| 11. | Exert straight path from to , the spiral path to , and to , then, the track point coordinates: |
| 12. | end for |
| Algorithm 2 Improved algorithm with rough path generation | |
| Input: | : Current velocity of AMSV : Safe distance between AMSV to obstacles : Max sampling length : Min sampling length : Obstacle information(1……n) : Start vertex : End vertex : Current vertex |
| Output: | Path: Rough path with free-obstacle |
| 1. | vertexs SamplePoints (τ_u, L_(min,) L_max) |
| 2. | vertexs.obstacle_cost ObstacleCostCaculate (vertexs, D_safe S_1,S_2……S_n) |
| 3. | ← GetEndPoint(τ_u, s_1,s_2……s_n) |
| 4. | ℂ=S; |
| 5. | While ℂ≠E |
| 6. | GetNeighborVertexs(ℂ,”vertexs”) |
| 7. | NeighborCurrentCostCaculate (v_neighbor) |
| 8. | NeighborHeuristicValueCaculate (v_neighbor) |
| 9. | NeighborFinalCostUpdate (v_neighbor, , , obstacle_cost) |
| 10. | UpdateCurrentVertexWithLowestCost(v_neighbor) |
| 11. | EndWhile |
| 12. | Build Path rooted at S |
| 13. | Return Path |
4. Path-Following Control Based on ESO-Based Finite-Time LOS Guidance
4.1. Finite-Time Sideslip Angle Observation
4.2. Finite-Time LOS Guidance
5. Finite-Time Control System Design in Path Following
6. Numerical Simulation
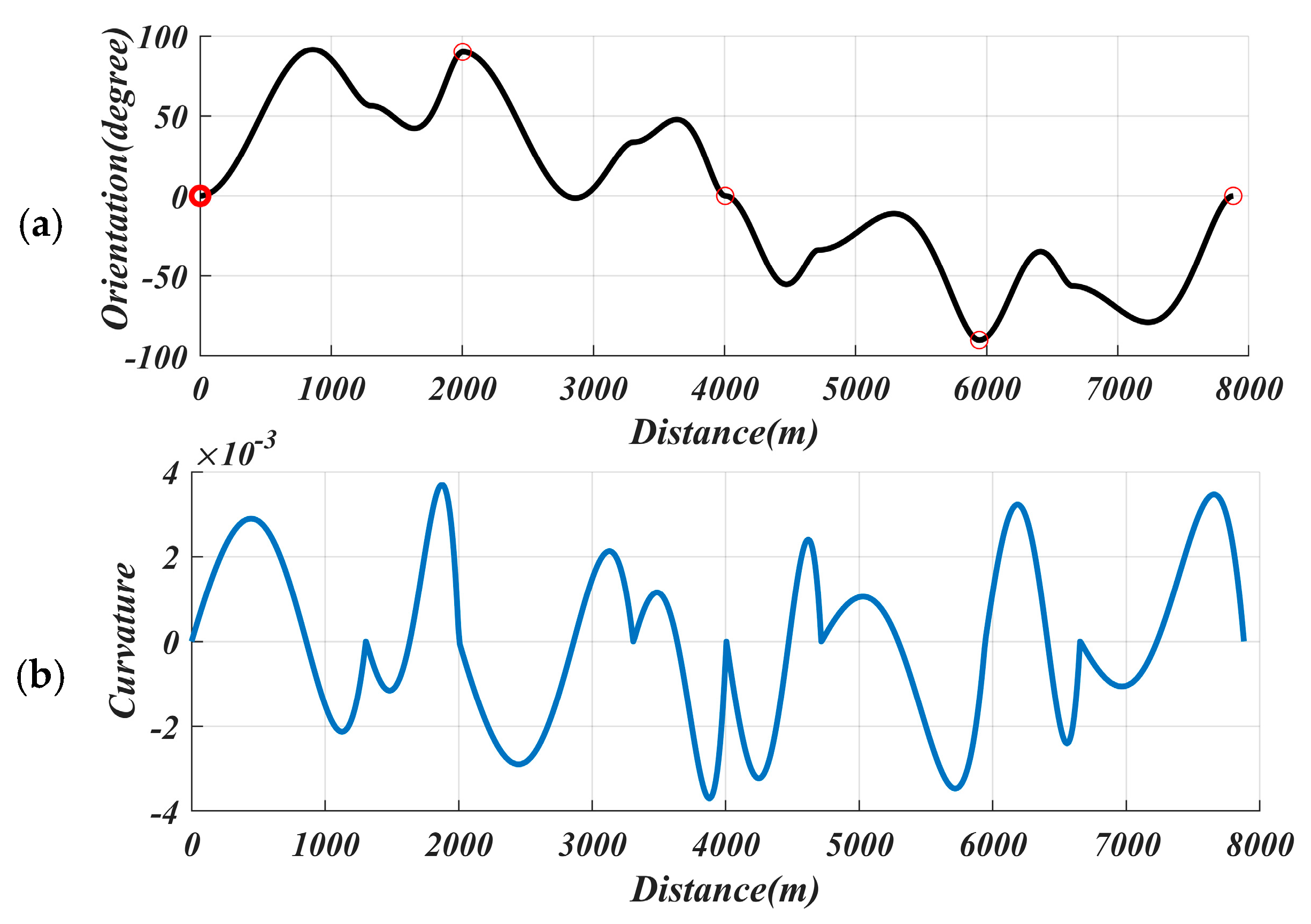
6.1. Results in Path Planning
6.2. Results in Path Following
6.3. Comparison Among Different Methods
- Parameters of the proposed controller in this article are given at the beginning of Section 6.
- For ALOS, it is assumed that the sideslip angle is measurable, so there is no side slip angle estimation module. This paper uses the method shown in reference [34] to compare with the proposed controller.
- For ILOS, an integral term is introduced to reduce the impact of the side slip angle, so there is no side slip angle estimation module. At the same time, it is an error-based adjustment method and cannot further improve the system tracking accuracy, which is very important for obstacle avoidance. This paper introduces the method shown in paper [7] and compares it with the proposed controller.
6.4. Robustness to Uncertainty
6.5. Obstacle Avoidance
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, X.; Wang, G.; Fan, Y. Model Identification and Trajectory Tracking Control for Vector Propulsion Unmanned Surface Vehicles. Electronics 2020, 9, 22. [Google Scholar] [CrossRef]
- Dubins, L.E. On Curves of Minimal Length with a Constraint on Average Curvature, and with Prescribed Initial and Terminal Positions and Tangents. Am. J. Math. 1957, 79, 497–516. [Google Scholar] [CrossRef]
- Lekkas, A.M.; Fossen, T.I. Integral LOS Path Following for Curved Paths Based on a Monotone Cubic Hermite Spline Parametrization. IEEE Trans. Control Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, C.; Yin, Y.; Wang, J. Safety-Certified Constrained Control of Maritime Autonomous Surface Ships for Automatic Berthing. IEEE Trans. Veh. Technol. 2023, 72, 8541–8552. [Google Scholar] [CrossRef]
- Healey, A.J.; Lienard, D. Multivariable sliding mode control for autonomous diving and steering of unmanned underwater vehicles. IEEE J. Ocean. Eng. 1993, 18, 327–339. [Google Scholar] [CrossRef]
- Gu, N.; Wang, D.; Peng, Z.; Wang, J.; Han, Q.L. Advances in Line-of-Sight Guidance for Path Following of Autonomous Marine Vehicles: An Overview. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 12–28. [Google Scholar] [CrossRef]
- Caharija, W.; Pettersen, K.Y.; Bibuli, M.; Calado, P.; Zereik, E.; Braga, J.; Gravdahl, J.T.; Sorensen, A.J.; Milovanovic, M.; Bruzzone, G. Integral Line-of-Sight Guidance and Control of Underactuated Marine Vehicles: Theory, Simulations, and Experiments. IEEE Trans. Control Syst. Technol. 2016, 24, 1623–1642. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Han, Y.; Li, J.; Wang, B. Event-Triggered Active Disturbance Rejection Control for Hybrid Energy Storage System in Electric Vehicle. IEEE Trans. Transp. Electrif. 2023, 9, 75–86. [Google Scholar] [CrossRef]
- Gao, S.; He, B.; Zhang, X.; Wan, J.; Mu, X.; Yun, T. Cruise Speed Estimation Strategy Based on Multiple Fuzzy Logic and Extended State Observer for Low-Cost AUV. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. ESO-Based Line-of-Sight Guidance Law for Path Following of Underactuated Marine Surface Vehicles With Exact Sideslip Compensation. IEEE J. Ocean. Eng. 2017, 42, 477–487. [Google Scholar] [CrossRef]
- Li, J.; Sun, J.; Chen, G. A Multi-Switching Tracking Control Scheme for Autonomous Mobile Robot in Unknown Obstacle Environments. Electronics 2020, 9, 42. [Google Scholar] [CrossRef]
- Kim, J.; Lee, C.; Chung, D.; Kim, J. Navigable Area Detection and Perception-Guided Model Predictive Control for Autonomous Navigation in Narrow Waterways. IEEE Robot. Autom. Lett. 2023, 8, 5456–5463. [Google Scholar] [CrossRef]
- Guan, W.; Wang, K. Autonomous Collision Avoidance of Unmanned Surface Vehicles Based on Improved A-Star and Dynamic Window Approach Algorithms. IEEE Intell. Transp. Syst. Mag. 2023, 15, 36–50. [Google Scholar] [CrossRef]
- Yao, P.; Zhao, R.; Zhu, Q. A Hierarchical Architecture Using Biased Min-Consensus for USV Path Planning. IEEE Trans. Veh. Technol. 2020, 69, 9518–9527. [Google Scholar] [CrossRef]
- Wang, N.; Xu, H. Dynamics-Constrained Global-Local Hybrid Path Planning of an Autonomous Surface Vehicle. IEEE Trans. Veh. Technol. 2020, 69, 6928–6942. [Google Scholar] [CrossRef]
- Meng, J.; Humne, A.; Bucknall, R.; Englot, B.; Liu, Y. A Fully-Autonomous Framework of Unmanned Surface Vehicles in Maritime Environments Using Gaussian Process Motion Planning. IEEE J. Ocean. Eng. 2023, 48, 59–79. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, Y.; Ahn, C.K.; Xu, Q. Autonomous Pilot of Unmanned Surface Vehicles: Bridging Path Planning and Tracking. IEEE Trans. Veh. Technol. 2022, 71, 2358–2374. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, C.; Yu, H. Finite-Time PLOS-Based Integral Sliding-Mode Adaptive Neural Path Following for Unmanned Surface Vessels With Unknown Dynamics and Disturbances. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1500–1511. [Google Scholar] [CrossRef]
- Rout, R.; Chi, R.; Yan, W. Sideslip-Compensated Guidance-Based Adaptive Neural Control of Marine Surface Vessels. IEEE Trans. Cybern. 2022, 52, 2860–2871. [Google Scholar] [CrossRef]
- Piao, Z.; Guo, C.; Sun, S. Adaptive Backstepping Sliding Mode Dynamic Positioning System for Pod Driven Unmanned Surface Vessel Based on Cerebellar Model Articulation Controller. IEEE Access 2020, 8, 48314–48324. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, G.; Yi, B.; Zhang, W. Practical proportional integral sliding mode control for underactuated surface ships in the fields of marine practice. Ocean Eng. 2017, 142, 217–223. [Google Scholar] [CrossRef]
- Hao, L.; Zhang, H.; Yue, W.; Li, H. Fault-tolerant compensation control based on sliding mode technique of unmanned marine vehicles subject to unknown persistent ocean disturbances. Int. J. Control Autom. Syst. 2020, 18, 739–752. [Google Scholar] [CrossRef]
- Tabataba’i-Nasab, F.S.; Moosavian, S.A.A.; Khalaji, A.K. Tracking Control of an Autonomous Underwater Vehicle: Higher-Order Sliding Mode Control Approach. In Proceedings of the 2019 7th International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 20–21 November 2019. [Google Scholar]
- Guerrero, J.; Chemori, A.; Torres, J.; Creuze, V. Time-delay high-order sliding mode control for trajectory tracking of autonomous underwater vehicles under disturbances. Ocean Eng. 2023, 268, 113375. [Google Scholar] [CrossRef]
- Zwierzewicz, Z. Robust and Adaptive Path-Following Control of an Underactuated Ship. IEEE Access 2020, 8, 120198–120207. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, Y.; Zeng, K.; Huang, L.; Huang, G.; Hua, W.; Wang, Y.; Gao, X. Finite-Time Cooperative Control for Vehicle Platoon With Sliding-Mode Controller and Disturbance Observer. IEEE Trans. Intell. Transp. Syst. 2022, 71, 7186–7201. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2020, 38, 751–766. [Google Scholar] [CrossRef]
- Yang, C.W.J.; Guo, L.; Li, S. Disturbance-observer-based control and related methods-an overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar]
- Wang, L.; Xu, C.; Cheng, J. Robust Output Path-Following Control of Marine Surface Vessels with Finite-Time LOS Guidance. J. Mar. Sci. Eng. 2020, 8, 275. [Google Scholar] [CrossRef]
- Stellato, B.; Banjac, G.; Goulart, P.; Bemporad, A.; Boyd, S. OSQP: An operator splitting solver for quadratic programs. Math. Program. Comput. 2020, 12, 637–672. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; Wiley: New York, NY, USA, 1994. [Google Scholar]
- Viadero-Monasterio, F.; Nguyen, A.T.; Lauber, J.; Boada, M.J.L.; Boada, B.L. Event-Triggered Robust Path Tracking Control Considering Roll Stability Under Network-Induced Delays for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 14743–14756. [Google Scholar] [CrossRef]
- Liu, F.; Shen, Y.; He, B.; Wang, D.; Wan, J.; Sha, Q.; Qin, P. Drift angle compensation-based adaptive line-of-sight path following for autonomous underwater vehicle. Appl. Ocean Res. 2016, 93, 799–808. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Settling Time (s) | Overshot | |
|---|---|---|
| ALOS | 381 | 15.8% |
| ILOS | 304 | 29.2% |
| Proposed method | 45.17 | 1.12% |
| Maximum Error | RMS | ||
|---|---|---|---|
| ALOS | 4.7684 | 0.6520 | |
| ILOS | 8.7522 | 1.2627 | |
| Proposed method | 0.3391 | 0.0151 | |
| ALOS | 0.2587 | 0.0266 | |
| ILOS | 0.4267 | 0.0440 | |
| Proposed method | 0.1176 | 0.0047 |
| Mass | The Absolute Value of the Maximum Error | RMS | |
|---|---|---|---|
| 0.4326 | 0.0876 | ||
| 0.3391 | 0.0151 | ||
| 0.6912 | 0.0978 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, B.; Sun, J. Finite Time ESO-Based Line-of-Sight Following Method with Multi-Objective Path Planning Applied on an Autonomous Marine Surface Vehicle. Electronics 2025, 14, 896. https://doi.org/10.3390/electronics14050896
Han B, Sun J. Finite Time ESO-Based Line-of-Sight Following Method with Multi-Objective Path Planning Applied on an Autonomous Marine Surface Vehicle. Electronics. 2025; 14(5):896. https://doi.org/10.3390/electronics14050896
Chicago/Turabian StyleHan, Bingheng, and Jinhong Sun. 2025. "Finite Time ESO-Based Line-of-Sight Following Method with Multi-Objective Path Planning Applied on an Autonomous Marine Surface Vehicle" Electronics 14, no. 5: 896. https://doi.org/10.3390/electronics14050896
APA StyleHan, B., & Sun, J. (2025). Finite Time ESO-Based Line-of-Sight Following Method with Multi-Objective Path Planning Applied on an Autonomous Marine Surface Vehicle. Electronics, 14(5), 896. https://doi.org/10.3390/electronics14050896