
Hierarchical Traffic Engineering in 3D Networks Using QoS-Aware Graph-Based Deep Reinforcement Learning



Abstract
1. Introduction
- Considering the heterogenous and distributed character of emerging 6th Generation (6G) networks, introduced is a TE framework based on distributed (multi-controller) hierarchical SDN and Multi-Agent Deep Reinforcement Learning (MADRL), which enables flexible global and per-segment optimisation of 3D networks (i.e., comprising terrestrial, aerial, and satellite segments). The proposed framework improves load distribution and flow acceptance rate while considering QoS requirements of individual flows and traffic priorities. Moreover, 3DQR tries to minimise the number of broken paths and path reconfigurations to reduce session disruptions and SDN Control Plane (CP) overhead to improve SDN scalability
- A hierarchical MADRL routing and path allocation strategy is developed, which involves intelligent DRL-Graph Neural Network (GNN) TE agents leveraging message passing and attention mechanisms as well as network topology predictions to improve the reasoning of agents and adaptability to frequently changing 3D network topology.
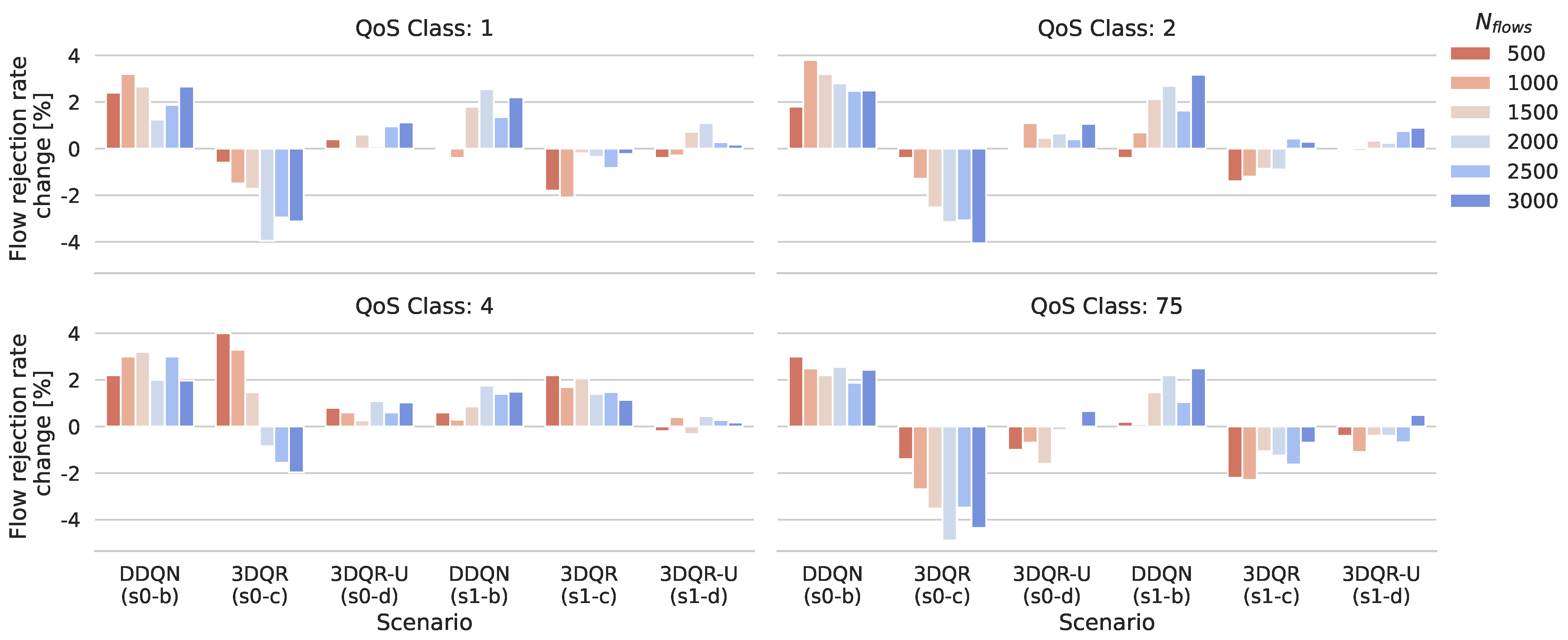
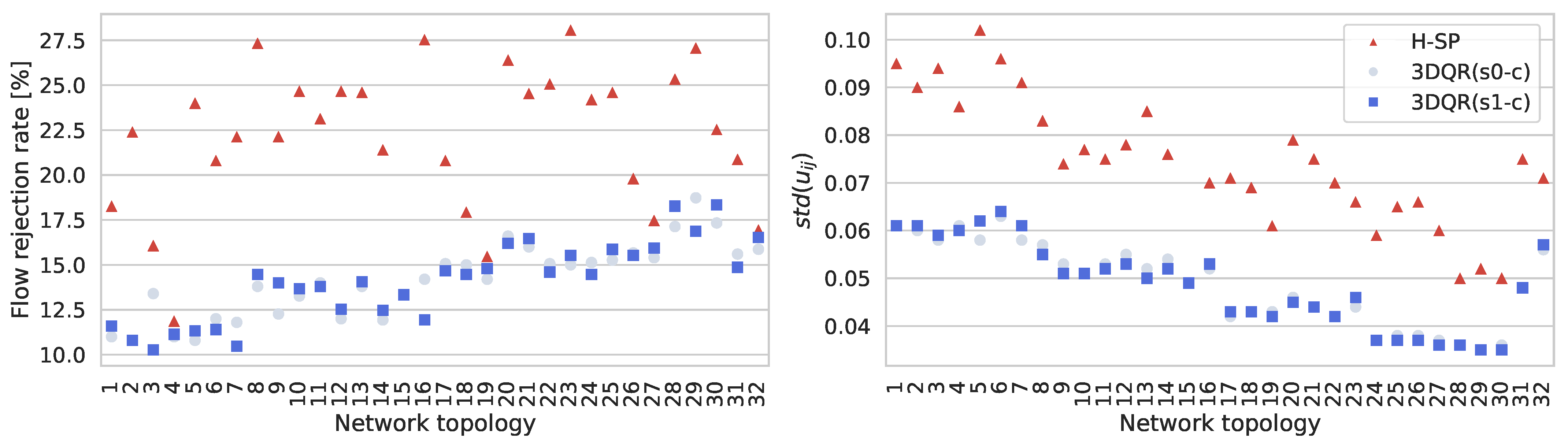
- Based on evaluation, an over 13% reduction in flow rejection rate and a 50% improved load distribution compared to baseline routing methods are demonstrated. Also, strong generalisation and transfer capabilities of 3DQR agents are demonstrated, which enable their effective exploitation in previously unseen topologies.
2. Routing Challenges in TN-NTN Mobile Networks
- (C1)
- Routing convergence—applying traditional Internet Protocol (IP) routing schemes, e.g., Open Shortest Path First (OSPF), is problematic in NTNs due to mobility of network nodes. Frequent reconfigurations of connections between nodes require continuous updates of routing tables and link costs to maintain up-to-date information on the network state within the nodes. The changes occur repeatedly, causing almost constant updates, which impacts the convergence and leads to unstable routing and large signalling overhead [18]. Adoption of SDN to provide dynamic and flexible user traffic steering is a common solution [18]. However, the original SDN concept lacks CP scalability, so its wide-scale deployments are problematic. Distributed SDN architectures allow for mitigating SDNC overload at the cost of complexity—E2E functionality requires the development of coordination mechanisms across multiple SDNCs. Also, in wide-scale deployments, SDNCs placement for optimal network control needs careful consideration (in terms of both intra- and cross-layer CP latency, network observability (obtaining reliable network monitoring information), and recovery).
- (C2)
- Temporal and predictive routing—topology changes caused by the mobile NTN nodes can lead to broken links or changes of link properties (e.g., bandwidth drops due to partial occlusion). Addressing these issues will require frequent rerouting of flows and path updates on a topology change, leading to extensive signalling traffic. To calculate viable routes with increased durability and mitigate the above issues, link availability prediction and mechanisms for fast updates of paths (via low-latency monitoring, TE metrics adjustments, etc.) are vital. These are required to support time-scheduled routing schemes and enhancements by contextual information (e.g., satellite orbits, air interfaces alignment, object occlusion, etc.).
- (C3)
- Resilience—the disappearing links and broken network paths can lead to severe Service Level Agreement (SLA) violations. Hence, increasing resilience to minimise the impact of communication cutoffs is a core requirement to enable QoS-driven services. Potential solutions include multi-path and/or node/edge-disjoint routing [19], in-switch buffering mechanisms in case of access node isolation (i.e., store-and-forward) [20,21], or predictive routing schemes.
- (C4)
- Optimisation—conventional TE algorithms—e.g., Multi-Protocol Label Switching—Traffic Engineering (MPLS-TE)—cannot be used effectively in NTNs due to long convergence time. The emerging routing and TE methods will need to consider both QoS constraints and effective traffic distribution to handle limited ISL capacity. Moreover, the synchronisation of network state information across TE databases and its unified representation in NTNs becomes crucial to facilitate E2E control and Artificial Intelligence (AI)-driven optimisation. To achieve the latter, the TE algorithms need to be able to extract the information from the nodes and link relationships rather than the fixed graph structure to avoid overly complex and monolithic models.
- (C5)
- Asset heterogeneity—future mobile networks are expected to combine heterogeneous systems with diversified service capabilities and properties (radio interfaces, protocol stack, etc.), i.e., the Network of Networks [22]. To enable E2E services in 3D networks, it is essential to develop dynamic QoS management and coordination mechanisms to provide paths satisfying E2E QoS regimes. Also, to handle the rising complexity, the network management will need to embed automated and intelligent TE mechanisms enabling cross-domain cooperation, knowledge transfer to new segments, and seamless operation.
3. Related Work
4. 3D QoS-Aware Routing (3DQR)
4.1. Concept Principles
- Monitoring—in spatially distributed networks, centralised SDNC suffers from CP link latency, which leads to obtaining obsolete monitoring data. The hierarchical approach partially addresses this issue, as SDNCs can be deployed in close proximity of switches. Moreover, growing network size increases the monitoring data volume dramatically. Therefore, instead of link-level metrics, SDNCs calculate the parameters of overlay links between domain ingress/egress nodes denoted as Border Nodess (BNs) (access nodes, gateways, satellites, etc.; cf. Figure 1). This reduces the monitoring traffic while conveying information about domains’ abilities to serve new flows (cf. Section 5.1).
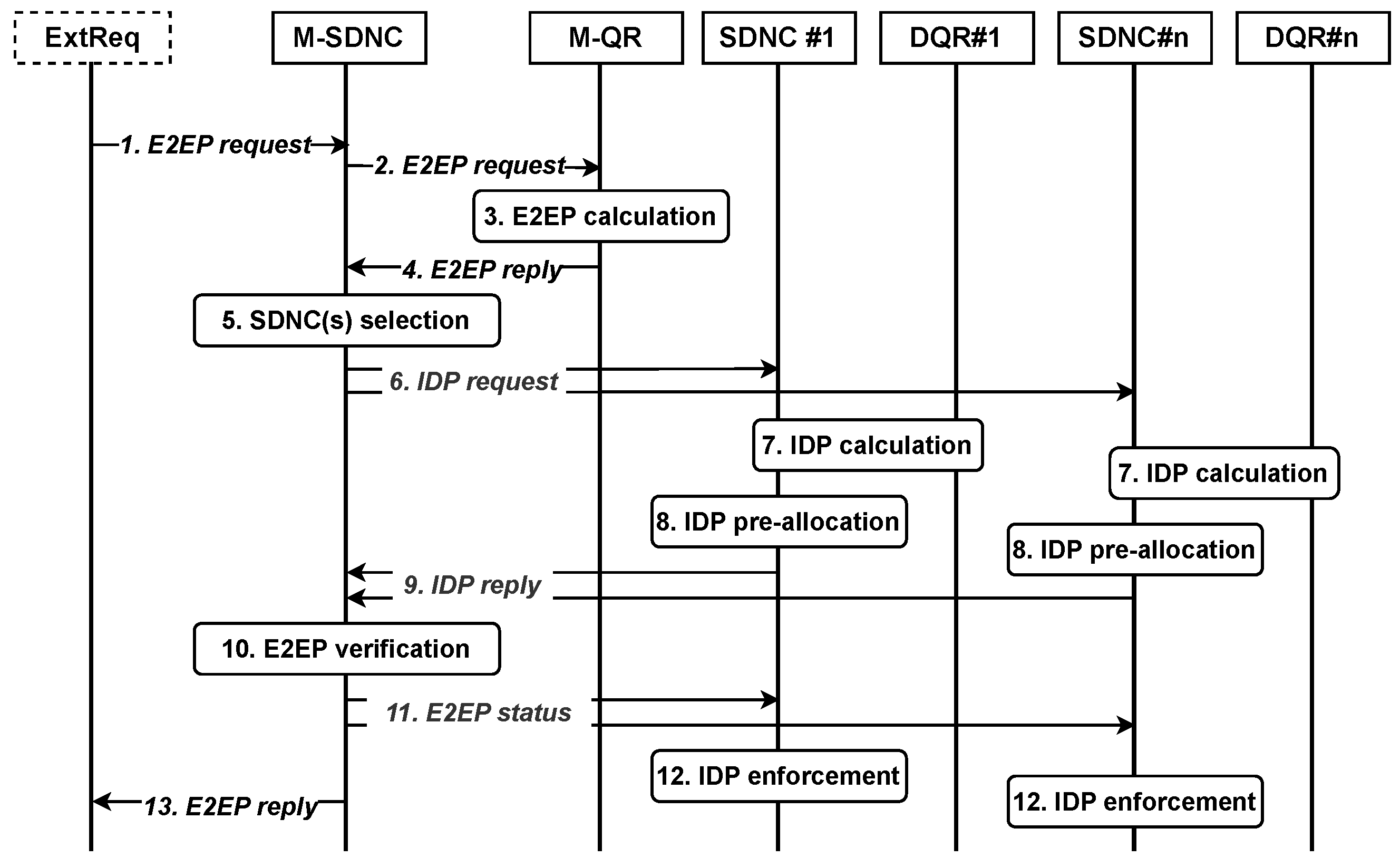
- CP operations—M-SDNC has a view limited to BNs, overlay links within domains, and interconnection links to domains. Hence, M-SDNC arranges the End-to-End Path (E2EP) enforcement by instructing individual SDNCs to allocate Intra-Domain Path (IDP) between BN pairs (i.e., a path composed of two BNs and intermediary relay nodes). As inter-domain links are either physical or overlay links between BNs of two domains, installing relevant flow entries in the BNs is equivalent to establishing the inter-domain path. The full E2EP allocation procedure is described in Section 4.2.
4.2. E2E Routing and Path Allocation Approach
5. Algorithm
- Using SDN-based deployment for flexible E2E routing and TE operations [C1, C4];
- Leveraging GIMMF-based predictions to improve DGA reasoning [C2] and to establish a topology containing stable links within a given time frame [C3];
- Providing a novel approach combining DDQN and GNN to (i) provide intelligent routing and path allocation decisions in 3D networks; (ii) enable variable size input; and (iii) embed both network- and flow-level metrics for evaluation of routing decisions [C4];
- Adopting a distributed SDN architecture and modular routers, enabling heterogeneous technologies at the domain level and dynamic attachment of new domains [C1, C5].
5.1. System Model
- Total capacity measured with no traffic between and :
- Aggregate of GFBRs allocated to flows :
- Peak aggregated bandwidth (aggregate of MFBRs) that can be consumed by allocated flows:
- Utilisation of overlay link between and :
5.2. DRL Problem Setup
- Distribute path allocations across links to maximise overall throughput—standard deviation of the utilisation of links , and overlay links ;
- Punish frequent rerouting to conserve SDN CP resources as each flow rerouting requires modification of forwarding rules in switches; this is achieved by using the heuristic Rerouting Cost (RC):
- Prioritise traffic and scale the punishments for allocation failures; therefore, the QoS Factor (QF) heuristic is introduced, which defines the value of each allocated flow based on the QoS identifier :
- Maximise throughput that can be consumed by flows—if there is remaining capacity in the link, high values of GFBR/MFBR indicate the substantial portion of excess bandwidth that can be consumed by flows; it also encourages the agent to allocate flows with different GFBR/MFBR ratios (commonly associated with different traffic classes) to maximise aggregate the GFBR and decrease the MFBR, allowing the excess bandwidth to be shared across active flows.
5.3. E2E Operation and DGA Architecture
- Local network—calculating Q-values for actions based on the environment state ;
- Target network—stabilising the learning process;
- Replay buffer—storing transitions, actions, and rewards used for training (cf. Figure 4).
| Algorithm 1 3DQR E2E routing and allocation | |
| |
| 1: for episode do | |
| 2: for step t in episode do | |
| 3: | ▹ Figure 3, Step 1 |
| 4: | |
| 5: getPath() | ▹ Figure 3, Steps 2–4 |
| 6: if not empty then | |
| 7: ensure: conditions (17) for ; else return | |
| 8: splitPath() | ▹ Figure 3, Step 5 |
| 9: for do | ▹ |
| 10: getDomain() | |
| 11: getPath() | ▹ Figure 3, Steps 6–9 |
| 12: ensure: conditions (18) for ; else return | |
| 13: .add() | |
| 14: expandPath() | |
| 15: ensure: conditions (19) for ; else return | ▹ Figure 3, Step 10 |
| 16: | |
| 17: for getDomains() do | |
| 18: getTransition() | |
| 19: .add() | |
| 20: every steps: trainAgent() | |
| 21: return | |
| 22: procedure getPath(): | ▹ graph IDs, |
| 23: getEnvironmentState() | |
| 24: enrichment | |
| 25: = getShortestPaths() | ▹ —candidate paths list |
| 26: for in do | |
| 27: = virtualPathAlloc(, ) | |
| 28: = () | |
| 29: | |
| 30: | |
| 31: | |
| 32: return | |
| 33: procedure splitPath(): | |
| 34: subpaths ← [] | |
| 35: for do | |
| 36: subpaths.add() | |
| 37: return: subpaths | ▹ |
| 38: procedure trainAgent(): | |
| 39: get sample: | |
| 40: grad. descent step: ( | |
| 41: every N steps: | |
- Standard MPNN—used to obtain the embeddings of nodes using both edge and node features. The standard MPNN model is used [53], which defines two phases of a forward operation: message passing (Equation (21)) and readout phases, where —a message function, —vertex update function, —hidden state, —message, and T—passing step.
- Global Attention Pooling (GAP)—global attention pooling [54] for aggregating node embeddings using attention mechanisms to obtain attention scores and calculate graph embedding . GAP plays the role of MPNN’s readout phase.
- Linear Layer (LL)—final linear layer that compresses the graph embedding vector into a singular output, which defines the Q-value of the allocation.
5.4. Complexity Analysis
- Rough E2EP computation by M-SDNC using overlay network graph ;
- IDP computation by designated SDNCs; using domain network graph ;
- Verification of E2EP and IDPs feasibility in terms of QoS requirements.
6. Evaluation
- Performance—showing gains of 3DQR compared to three baseline methods: (i) the most-common SP routing using link delay as the weight metric at both overlay and domain levels, further referred to as H-SP; (ii) a combination of SP for overlay routing and NTNs and classic DDQN for TNs (DNN-based architecture), and 3DQR-Uncoordinated (3DQR-U)—domain DGAs and SP-routing at the overlay level (cf. Section 6.1);
- Transfer capabilities—comprising performance tests of DGAs trained in one topology and operating in previously unseen topologies with different topological properties (cf. Section 6.2);
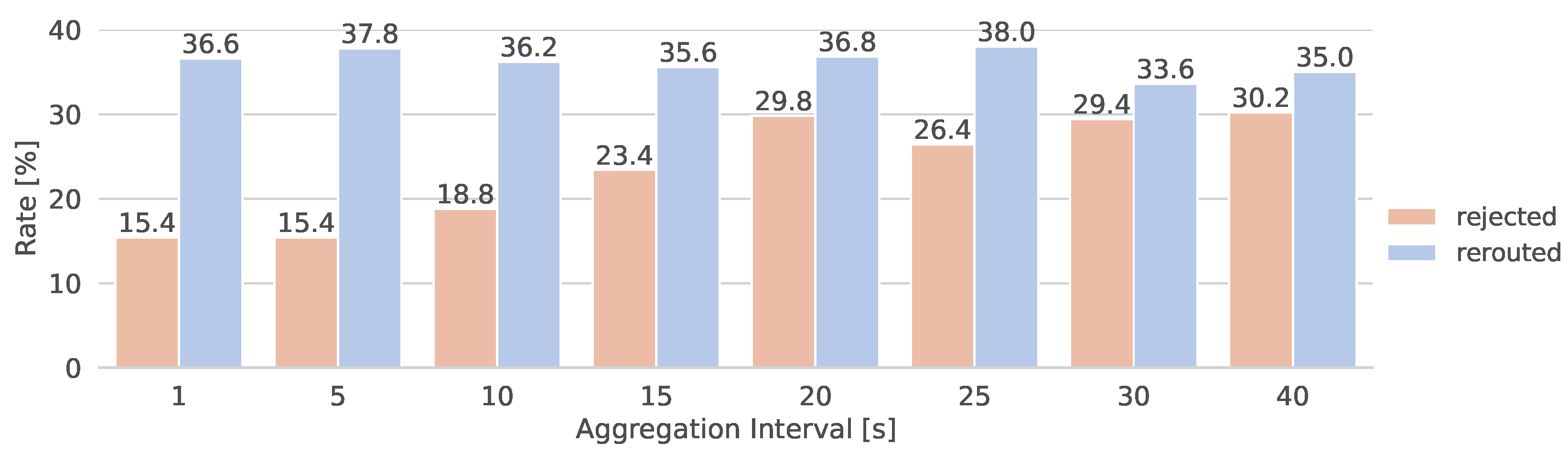
- Aggregation impact—verifying the impact of interval of topology aggregation by GIMMF on 3DQR performance under low traffic load (cf. Section 6.3).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test ID | Topology | Algorithm (TN, NTN, TN-NTN) | Scope |
|---|---|---|---|
| s0-a | T1 | H-SP | Performance |
| s0-b | DDQN-SP-SP | ||
| s0-c | 3DQR | ||
| s0-d | 3DQR-U | ||
| s1-a | T2 | H-SP | |
| s1-b | DDQN-SP-SP | ||
| s1-c | 3DQR | ||
| s1-d | 3DQR-U | ||
| s2-a | T1-T23 | H-SP | Transfer |
| s2-b | 3DQR (s0-c) | ||
| s2-c | 3DQR (s1-c) | ||
| s3 | T1 | 3DQR | Topology aggregation interval 1–40 s |
6.1. Performance
6.2. Transfer
6.3. Topology Aggregation Interval Impact
7. Considerations and Future Work
- SDN CP distribution and operations granularity—while hierarchical multi-controller architectures improve the SDN CP scalability, the information exchange needed to establish the E2E paths increases with the degree of distribution. Moreover, it impacts the complexity of an M-SDNC as it needs to synchronise the states and operations of several spatially distant components. Hence, an appropriate deployment strategy and granularity of the distribution need to be adopted, including SDNCs and M-SDNC placement, to avoid large coordination overheads [59].
- Resource utilisation and flow fairness—the allocations with fixed QoS guarantees can lead to resource underspending if the allocated resources differ from the ones actually consumed by flows. To this end, it is vital to properly classify the incoming traffic to minimise this effect and employ advanced monitoring mechanisms to obtain actual resource consumption. Moreover, in the case of excessive allocation by the SDNCs, the DP components would require queue-level mechanisms to enforce flow fairness.
- DRL Performance—the MADRL setup enables decreasing the state space and variability, which allows the agents to converge faster. In certain cases, however, e.g., in sparse topologies, the observable gain from deploying a DRL optimisation agent might be minor due to limited action space. Hence, the 3DQR deployment should also consider the complexity of individual network segments and DGAs deployment costs.
- SLA Violations—due to dynamic conditions, the change of link parameters (e.g., partial ISL occlusion by debris) may result in QoS parameters and SLA violation. Here, allocation itself was focused. However, it is essential to develop monitoring and alerting extensions that allow the tracking of the network status and performing flow rerouting in case of SLA violation risks or mobility events.
8. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 3DQR | 3D QoS-aware Routing |
| 3DQR-U | 3DQR-Uncoordinated |
| 3D | Three Dimension |
| 3GPP | 3rd Generation Partnership Project |
| 5GS | 5G System |
| 5QI | 5G QoS Identifier |
| 6G | 6th Generation |
| A-SDNC | Aerial SDNC |
| AI | Artificial Intelligence |
| AP | Application Plane |
| API | Application Programming Interface |
| BN | Border Nodes |
| CP | Control Plane |
| DGA | DRL-GNN Agent |
| DL | downlink |
| DNN | Deep Neural Network |
| DP | Data Plane |
| DDQN | Double Deep Q-Network |
| DQR | Domain QoS-aware Router |
| DRL | Deep Reinforcement Learning |
| E2E | End-to-End |
| E2EP | End-to-End Path |
| ExtReq | External Requester |
| FL | Feeder Link |
| GAP | Global Attention Pooling |
| GEO | Geostationary Earth Orbit |
| GFBR | Guaranteed Flow Bit Rate |
| GIMMF | Geographic Information System-based Mobility Management Function |
| GNN | Graph Neural Network |
| HAPS | High Altitude Platform System |
| H-SP | Hierarchical Shortest Path |
| IDP | Intra-Domain Path |
| ILP | Integer Linear Programming |
| IP | Internet Protocol |
| ISL | Inter-Satellite Link |
| LEO | Low Earth Orbit |
| LL | Linear Layer |
| LSTM | Long Short-Term Memory |
| M-QR | Master QR |
| M-SDNC | Main SDNC |
| MADRL | Multi-Agent Deep Reinforcement Learning |
| MANO | Management and Orchestration |
| MDP | Markov Decision Process |
| MEO | Medium Earth Orbit |
| MFBR | Maximum Flow Bit Rate |
| ML | Machine Learning |
| MLP | Multi-Layer Perceptron |
| MPLS-TE | MultiProtocol Label Switching-Traffic Engineering |
| MPNN | Message Passing Neural Network |
| NBI | NorthBound Interface |
| NTN | Non-Terrestrial Network |
| OF | OpenFlow |
| OSPF | Open Shortest Path First |
| PDB | Packet Delay Budget |
| PER | Packet Error Rate |
| QF | QoS Factor |
| QoS | Quality of Service |
| RAN | Radio Access Network |
| RL | Reinforcement Learning |
| RC | Rerouting Cost |
| S-SDNC | Satellite SDNC |
| SCN | Service-Customised Network |
| SAGIN | Space-Air-Ground Integrated Network |
| SDN | Software Defined Networking |
| SDNC | SDN Controller |
| SLA | Service Level Agreement |
| SotA | State of the Art |
| SP | Shortest Path |
| SR | Source Routing |
| T-SDNC | Terrestrial SDNC |
| TCP | Transport Control Protocol |
| TE | Traffic Engineering |
| TED | Traffic Engineering Database |
| TLE | Two-Line Element |
| TN | Terrestrial Network |
| UAV | Unmanned Aerial Vehicle |
| UE | User Equipment |
| UL | uplink |
| UP | User Plane |
References
- ITU-R. Future Technology Trends of Terrestrial International Mobile Telecommunications Systems Towards 2030 and Beyond; Report M.2516-0; International Telecommunication Union—Radiocommunication Sector: Geneva, Switzerland, 2022. [Google Scholar]
- 3GPP. Study on Using Satellite Access in 5G, ver. 16.0.0; Technical Report TR 22.822; 3rd Generation Partnership Project. 2018. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3372 (accessed on 2 March 2025).
- Guidotti, A.; Vanelli-Coralli, A.; Schena, V.; Chuberre, N.; El Jaafari, M.; Puttonen, J.; Cioni, S. The Path to 5G-Advanced and 6G Non-Terrestrial Network Systems. In Proceedings of the 2022 11th Advanced Satellite Multimedia Systems Conference and the 17th Signal Processing for Space Communications Workshop ASMS/SPSC), Graz, Austria, 6–8 September 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Tomaszewski, L.; Kołakowski, R.; Mesodiakaki, A.; Ntontin, K.; Antonopoulos, A.; Pappas, N.; Fiore, M.; Mosahebfard, M.; Watts, S.; Harris, P.; et al. ETHER: Energy- and Cost-Efficient Framework for Seamless Connectivity over the Integrated Terrestrial and Non-terrestrial 6G Networks. In Proceedings of the Artificial Intelligence Applications and Innovations. AIAI 2023 IFIP WG 12.5 International Workshops, León, Spain, 14–17 June 2023; Maglogiannis, I., Iliadis, L., Papaleonidas, A., Chochliouros, I., Eds.; pp. 32–44. [Google Scholar] [CrossRef]
- King, D.; Shortt, K. Time Variant Challenges for Non-Terrestrial Networks; Internet Draft draft-king-tvr-ntn-challanges-00; Internet Engineering Task Force: Wilmington, DE, USA, 2023. [Google Scholar]
- Ali, I.; Al-Dhahir, N.; Hershey, J. Predicting the Visibility of LEO Satellites. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 1183–1190. [Google Scholar] [CrossRef]
- Altamirano, J.C.; Slimane, M.A.; Hassan, H.; Drira, K. QoS-aware Network Self-management Architecture Based on DRL and SDN for Remote Areas. In Proceedings of the 2022 IEEE 11th IFIP International Conference on Performance Evaluation and Modeling in Wireless and Wired Networks (PEMWN), Rome, Italy, 8–10 November 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Guo, Y.; Lin, B.; Tang, Q.; Ma, Y.; Luo, H.; Tian, H.; Chen, K. Distributed Traffic Engineering in Hybrid Software Defined Networks: A Multi-Agent Reinforcement Learning Framework. IEEE Trans. Netw. Serv. Manag. 2024, 21, 6759–6769. [Google Scholar] [CrossRef]
- Chen, X.; Ji, Z.; Wu, S.; Jia, H.; Xiao, A.; Jiang, C. A Distributed Routing Algorithm for LEO Satellite Networks: A Multi-Agent Transformer-MIX Learning Approach. IEEE Internet Things J. 2025. Early Access. [Google Scholar] [CrossRef]
- Liao, H.; Zhang, X.; Zhou, J.; Li, X. Real-Time Routing Design for LEO Satellite Networks: An Enhanced Multi-Agent DRL Approach. In Proceedings of the 2024 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Hangzhou, China, 7–9 August 2024; pp. 547–552. [Google Scholar] [CrossRef]
- Liu, X.; Chen, A.; Zheng, K.; Chi, K.; Yang, B.; Taleb, T. Distributed Computation Offloading for Energy Provision Minimization in WP-MEC Networks with Multiple HAPs. IEEE Trans. Mob. Comput. 2024. Early Access. [Google Scholar] [CrossRef]
- Ran, Y.; Ding, Y.; Chen, S.; Lei, J.; Luo, J. Fully-Distributed Dynamic Packet Routing for LEO Satellite Networks: A GNN-Enhanced Multi-Agent Reinforcement Learning Approach. IEEE Trans. Veh. Technol. 2024. Early Access. [Google Scholar] [CrossRef]
- Ammar, S.; Pong Lau, C.; Shihada, B. An In-Depth Survey on Virtualization Technologies in 6G Integrated Terrestrial and Non-Terrestrial Networks. IEEE Open J. Commun. Soc. 2024, 5, 3690–3734. [Google Scholar] [CrossRef]
- Bannour, F.; Souihi, S.; Mellouk, A. Distributed SDN Control: Survey, Taxonomy, and Challenges. IEEE Commun. Surv. Tutor. 2018, 20, 333–354. [Google Scholar] [CrossRef]
- Guo, J.; Yang, L.; Rincon, D.; Sallent, S.; Fan, C.; Chen, Q.; Li, X. SDN Controller Placement in LEO Satellite Networks Based on Dynamic Topology. In Proceedings of the 2021 IEEE/CIC International Conference on Communications in China (ICCC), Xiamen, China, 28–30 July 2021; pp. 1083–1088. [Google Scholar] [CrossRef]
- Kołakowski, R.; Kukliński, S.; Tomaszewski, L. Hierarchical Deep Reinforcement Learning-Based Load Balancing Algorithm for Multi-Domain Software-Defined Networks. In Proceedings of the 2024 IFIP Networking Conference (IFIP Networking), Thessaloniki, Greece, 3–6 June 2024; pp. 607–612. [Google Scholar] [CrossRef]
- Geraci, G.; Lopez-Perez, D.; Benzaghta, M.; Chatzinotas, S. Integrating Terrestrial and Non-terrestrial Networks: 3D Opportunities and Challenges. IEEE Commun. Mag. 2022, 61, 42–48. [Google Scholar] [CrossRef]
- Han, L.; Retana, A.; Westphal, C.; Li, R. Large Scale LEO Satellite Networks for the Future Internet: Challenges and Solutions to Addressing and Routing. Comput. Netw. Commun. 2022, 1, 30–57. [Google Scholar] [CrossRef]
- Du, P.; Nazari, S.; Mena, J.; Fan, R.; Gerla, M.; Gupta, R. Multipath TCP in SDN-enabled LEO Satellite Networks. In Proceedings of the MILCOM 2016–2016 IEEE Military Communications Conference, Baltimore, MD, USA, 1–3 November 2016; pp. 354–359. [Google Scholar] [CrossRef]
- Monzon Baeza, V.; Rigazzi, G.; Aguilar, S.; Ferrus, R.; Ferrer, J.; Mhatre, S.; Guadalupi, M. IoT-NTN Communications via Store-and-Forward Core Network in Multi-LEO-satellite Deployments. In Proceedings of the 2024 IEEE 35th International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Valencia, Spain, 2–5 September 2024; pp. 1–6. [Google Scholar] [CrossRef]
- 3GPP. Study on Satellite Access—Phase 3, ver. 19.2.0. Technical Report TR 22.865. 3rd Generation Partnership Project. 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=4089 (accessed on 2 March 2025).
- Orange. Mobile Network Technology Evolutions Beyond 2030; White Paper; Orange: Paris, France, 2024. [Google Scholar]
- Yang, Z.; Li, H.; Wu, Q.; Wu, J. Topology Discovery Sub-Layer for Integrated Terrestrial-Satellite Network Routing Schemes. China Commun. 2018, 15, 42–57. [Google Scholar] [CrossRef]
- Cao, X.; Li, Y.; Xiong, X.; Wang, J. Dynamic Routings in Satellite Networks: An Overview. Sensors 2022, 22, 4552. [Google Scholar] [CrossRef] [PubMed]
- Korikawa, T.; Takasaki, C.; Hattori, K.; Oowada, H. Time-Topology Routing in 3D Networks. In Proceedings of the 2023 International Conference on Computing, Networking and Communications (ICNC), Honolulu, HI, USA, 20–22 February 2023; pp. 348–352. [Google Scholar] [CrossRef]
- Kumar, P.; Bhushan, S.; Halder, D.; Baswade, A.M. fybrrLink: Efficient QoS-aware Routing in SDN Enabled Next-Gen Satellite Networks. arXiv 2021, arXiv:2106.07778. [Google Scholar] [CrossRef]
- Jiang, Y.; Wu, S.; Mo, Q. A Compass Time-Space Model-Based Virtual IP Routing Scheme for NTSN Satellite Constellations. Chin. J. Aeronaut. 2023, 36, 280–288. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, H.; Jin, J.; Tian, F. A Cooperative Routing Algorithm for Data Downloading in LEO Satellite Network. In Proceedings of the 2021 IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021; pp. 1386–1391. [Google Scholar] [CrossRef]
- Liu, Q.; Li, X.; Ji, H.; Zhang, H. Multi-Path Routing Algorithm with Joint Optimization of Load-Balancing for Cluster-Based Leo Satellite Networks. In Proceedings of the 2023 8th IEEE International Conference on Network Intelligence and Digital Content (IC-NIDC), Beijing, China, 3–5 November 2023; pp. 264–268. [Google Scholar] [CrossRef]
- Rao, Y.; Wang, R. Multi-Path QoS Routing Using Genetic Algorithm for LEO Satellite Networks. Chin. J. Electron. 2011, 20, 17–20. [Google Scholar]
- Lian, P.; Yan, F.; Luo, H.; Wang, Z.; Zhang, S. Multicast Source Routing Based on Bloomed Link Identifiers for LEO Satellite Network. In Proceedings of the 2022 IEEE International Conference on Satellite Computing (Satellite), Shenzhen, China, 26–27 November 2022; pp. 13–18. [Google Scholar] [CrossRef]
- Ventre, P.L.; Tajiki, M.M.; Salsano, S.; Filsfils, C. SDN Architecture and Southbound APIs for IPv6 Segment Routing Enabled Wide Area Networks. IEEE Trans. Netw. Serv. Manag. 2018, 15, 1378–1392. [Google Scholar] [CrossRef]
- Tang, F.; Mao, B.; Kawamoto, Y.; Kato, N. Survey on Machine Learning for Intelligent End-to-End Communication Toward 6G: From Network Access, Routing to Traffic Control and Streaming Adaption. IEEE Commun. Surv. Tutor. 2021, 23, 1578–1598. [Google Scholar] [CrossRef]
- Wang, C.; Wang, H.; Wang, W. A Two-Hops State-Aware Routing Strategy Based on Deep Reinforcement Learning for LEO Satellite Networks. Electronics 2019, 8, 920. [Google Scholar] [CrossRef]
- Tsai, K.C.; Fan, L.; Wang, L.C.; Lent, R.; Han, Z. Multi-Commodity Flow Routing for Large-Scale LEO Satellite Networks Using Deep Reinforcement Learning. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 626–631. [Google Scholar] [CrossRef]
- Geyer, F.; Carle, G. Learning and Generating Distributed Routing Protocols Using Graph-Based Deep Learning. In Proceedings of the 2018 Workshop on Big Data Analytics and Machine Learning for Data Communication Networks, Budapest Hungary, 20 August 2018; pp. 40–45. [Google Scholar] [CrossRef]
- Rusek, K.; Suarez-Varela, J.; Almasan, P.; Barlet-Ros, P.; Cabellos-Aparicio, A. RouteNet: Leveraging Graph Neural Networks for Network Modeling and Optimization in SDN. IEEE J. Sel. Areas Commun. 2020, 38, 2260–2270. [Google Scholar] [CrossRef]
- Zhuang, Z.; Wang, J.; Qi, Q.; Sun, H.; Liao, J. Toward Greater Intelligence in Route Planning: A Graph-Aware Deep Learning Approach. IEEE Syst. J. 2020, 14, 1658–1669. [Google Scholar] [CrossRef]
- Dudukovich, R.; Hylton, A.; Papachristou, C. A Machine Learning Concept for {DTN} Routing. In Proceedings of the 2017 IEEE International Conference on Wireless for Space and Extreme Environments (WiSEE), Montreal, QC, Canada, 10–12 October 2017; pp. 110–115. [Google Scholar] [CrossRef]
- Zhang, S.; Yin, B.; Zhang, W.; Cheng, Y. Topology Aware Deep Learning for Wireless Network Optimization. IEEE Trans. Wirel. Commun. 2022, 21, 9791–9805. [Google Scholar] [CrossRef]
- Almasan, P.; Suárez-Varela, J.; Rusek, K.; Barlet-Ros, P.; Cabellos-Aparicio, A. Deep Reinforcement Learning Meets Graph Neural Networks: Exploring a Routing Optimization Use Case. Comput. Commun. 2022, 196, 184–194. [Google Scholar] [CrossRef]
- He, C.; Balasubramanian, K.; Ceyani, E.; Yang, C.; Xie, H.; Sun, L.; He, L.; Yang, L.; Yu, P.S.; Rong, Y.; et al. FedGraphNN: A Federated Learning System and Benchmark for Graph Neural Networks. arXiv 2021, arXiv:2104.07145. [Google Scholar] [CrossRef]
- Eiza, M.; Raschellà, A. A Hybrid SDN-based Architecture for Secure and QoS Aware Routing in Space-Air-Ground Integrated Networks (SAGINs). In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, UK, 26–29 March 2023. [Google Scholar] [CrossRef]
- Wei, L.; Shuai, J.; Liu, Y.; Wang, Y.; Zhang, L. Service Customized Space-Air-Ground Integrated Network for Immersive Media: Architecture, Key Technologies, and Prospects. China Commun. 2022, 19, 1–13. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, S.; Yang, P.; Alhussein, O.; Zhuang, W.; Shen, X.S. Software Defined Space-Air-Ground Integrated Vehicular Networks: Challenges and Solutions. IEEE Commun. Mag. 2017, 55, 101–109. [Google Scholar] [CrossRef]
- ONF. OpenFlow Switch Specification, Version 1.5.1 (Protocol Version 0x06); Specification ONF TS-025; Open Networking Foundation: Palo Alto, CA, USA, 2015. [Google Scholar]
- van Hasselt, H.; Guez, A.; Silver, D. Deep Reinforcement Learning with Double Q-learning. In Proceedings of the 30th AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2015. [Google Scholar] [CrossRef]
- 3GPP. System Architecture for the 5G System (5GS), ver. 19.2.1. Technical Standard TS 23.501. 3rd Generation Partnership Project. 2025. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3144 (accessed on 2 March 2025).
- Phemius, K.; Bouet, M. Monitoring Latency with OpenFlow. In Proceedings of the 9th International Conference on Network and Service Management (CNSM 2013), Zurich, Switzerland, 14–18 October 2013; pp. 122–125. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.; Guo, H.; Mao, B. Deep Reinforcement Learning for Securing Software-Defined Industrial Networks With Distributed Control Plane. IEEE Trans. Ind. Inform. 2022, 18, 4275–4285. [Google Scholar] [CrossRef]
- Tang, M.; Cai, S.; Lau, V.K.N. Online System Identification and Control for Linear Systems with Multiagent Controllers Over Wireless Interference Channels. IEEE Trans. Autom. Control 2023, 68, 6020–6035. [Google Scholar] [CrossRef]
- van Hasselt, H. Double Q-learning. In Advances in Neural Information Processing Systems 23: Proceedings of the 24th Annual Conference on Neural Information Processing Systems, Vancouver, BC, Canada, 6–9 December 2010; Lafferty, J.D., Williams, C.K.I., Shawe-Taylor, J., Zemel, R.S., Culotta, A., Eds.; Curran Associates, Inc.: New York, NY, USA, 2010; Volume 3, pp. 2613–2621. [Google Scholar]
- Gilmer, J.; Schoenholz, S.S.; Riley, P.F.; Vinyals, O.; Dahl, G.E. Neural Message Passing for Quantum Chemistry. In Proceedings of the 34th International Conference on Machine Learning—Volume 70, ICML’17, Sydney, NSW, Australia, 6–11 June 2017; pp. 1263–1272. Available online: https://dl.acm.org/doi/pdf/10.5555/3305381.3305512 (accessed on 2 March 2025).
- Lee, J.; Lee, I.; Kang, J. Self-Attention Graph Pooling. arXiv 2019, arXiv:1904.08082. [Google Scholar] [CrossRef]
- SimPy Documentation. Available online: https://simpy.readthedocs.io/en/latest/ (accessed on 2 March 2025).
- PyG Documentation—Pytorch_geometric Documentation. Available online: https://pytorch-geometric.readthedocs.io/en/latest/ (accessed on 2 March 2025).
- Skyfield—Documentation. Available online: https://rhodesmill.org/skyfield/ (accessed on 2 March 2025).
- CelesTrak: Current Supplemental GP Element Sets. Available online: https://celestrak.org/NORAD/elements/supplemental/ (accessed on 2 March 2025).
- Gunther, N.J. A Simple Capacity Model of Massively Parallel Transaction Systems. In Proceedings of the 19th International Computer Measurement Group Conference, San Diego, CA, USA, 6–10 December 1993. [Google Scholar]








| 5QI | PDB [ms] | PER | GFBR | MFBR | QF | Example Service |
|---|---|---|---|---|---|---|
| 1 | 100 | 10−2 | 75 | 150 | 0.3 | Conversational voice |
| 2 | 150 | 10−3 | 2000 | 5000 | 0.5 | Conversational video |
| 4 | 300 | 10−6 | 1000 | 2000 | 0.8 | Non-conversational video (buffered streaming) |
| 75 | 50 | 10−2 | 500 | 1000 | 0.9 | A2X messages, aircraft telemetry |
| Test | s0-a | s0-b | s0-c | s0-d | s1-a | s1-b | s1-c | s1-d | |
|---|---|---|---|---|---|---|---|---|---|
| 1000 | 0.067 | 0.06 | 0.044 | 0.063 | 0.062 | 0.065 | 0.059 | 0.062 | |
| [%] | - | −11.7 | −52.3 | −6.3 | - | 4.6 | −5.1 | 0.0 | |
| 2000 | 0.072 | 0.065 | 0.048 | 0.069 | 0.069 | 0.073 | 0.067 | 0.07 | |
| [%] | - | −10.8 | −50.0 | −4.3 | - | 5.5 | −3.0 | 1.4 | |
| 3000 | 0.075 | 0.067 | 0.051 | 0.072 | 0.073 | 0.077 | 0.07 | 0.073 | |
| [%] | - | −11.9 | −47.1 | −4.2 | - | 5.2 | −4.3 | 0.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kołakowski, R.; Tomaszewski, L.; Tępiński, R.; Kukliński, S. Hierarchical Traffic Engineering in 3D Networks Using QoS-Aware Graph-Based Deep Reinforcement Learning. Electronics 2025, 14, 1045. https://doi.org/10.3390/electronics14051045
Kołakowski R, Tomaszewski L, Tępiński R, Kukliński S. Hierarchical Traffic Engineering in 3D Networks Using QoS-Aware Graph-Based Deep Reinforcement Learning. Electronics. 2025; 14(5):1045. https://doi.org/10.3390/electronics14051045
Chicago/Turabian StyleKołakowski, Robert, Lechosław Tomaszewski, Rafał Tępiński, and Sławomir Kukliński. 2025. "Hierarchical Traffic Engineering in 3D Networks Using QoS-Aware Graph-Based Deep Reinforcement Learning" Electronics 14, no. 5: 1045. https://doi.org/10.3390/electronics14051045
APA StyleKołakowski, R., Tomaszewski, L., Tępiński, R., & Kukliński, S. (2025). Hierarchical Traffic Engineering in 3D Networks Using QoS-Aware Graph-Based Deep Reinforcement Learning. Electronics, 14(5), 1045. https://doi.org/10.3390/electronics14051045