
A Transient Control Strategy for Grid-Forming Photovoltaic Systems Based on Dynamic Virtual Impedance and RBF Neural Networks


Abstract
1. Introduction
2. The GFM Photovoltaic System Model
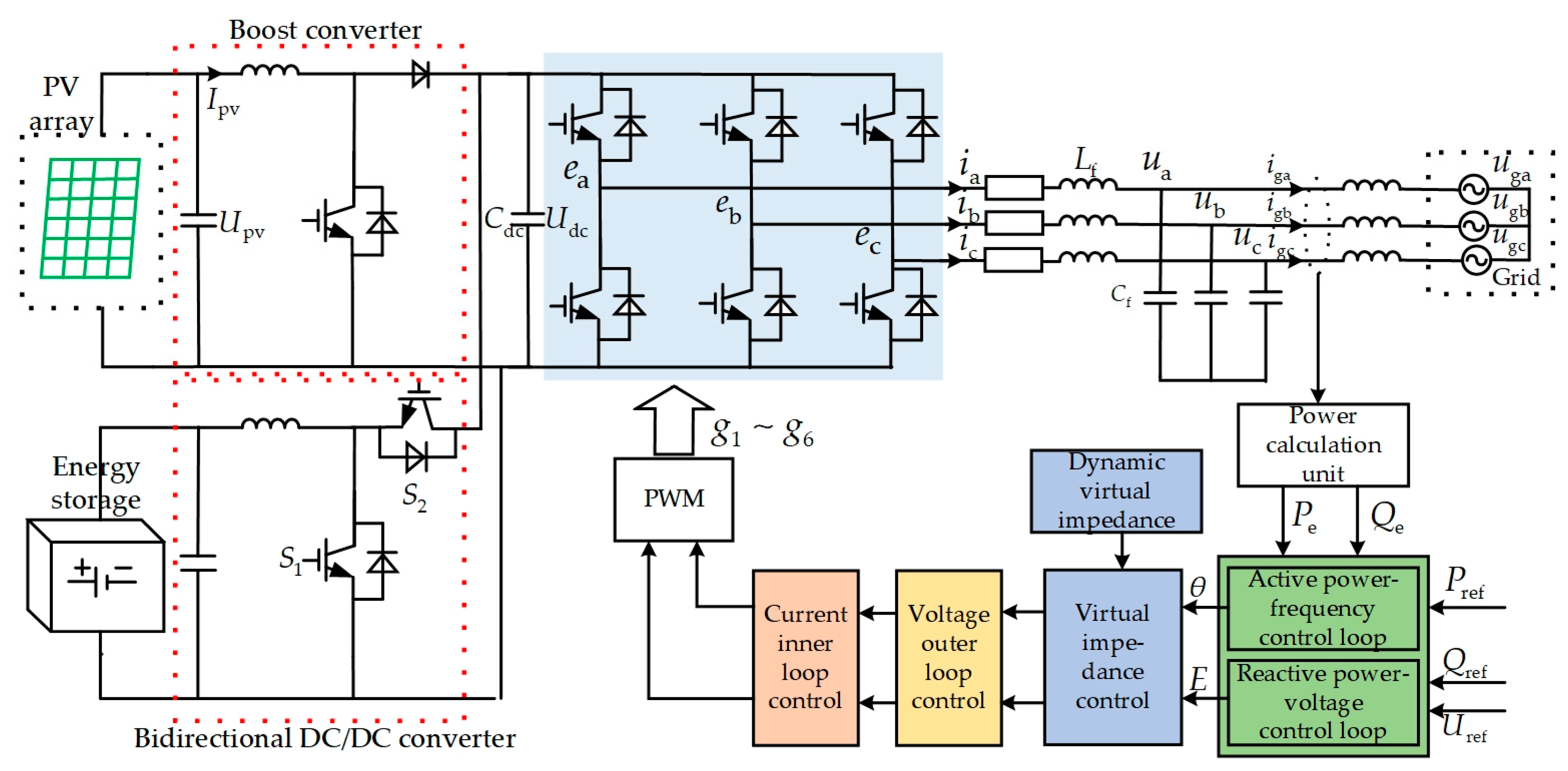
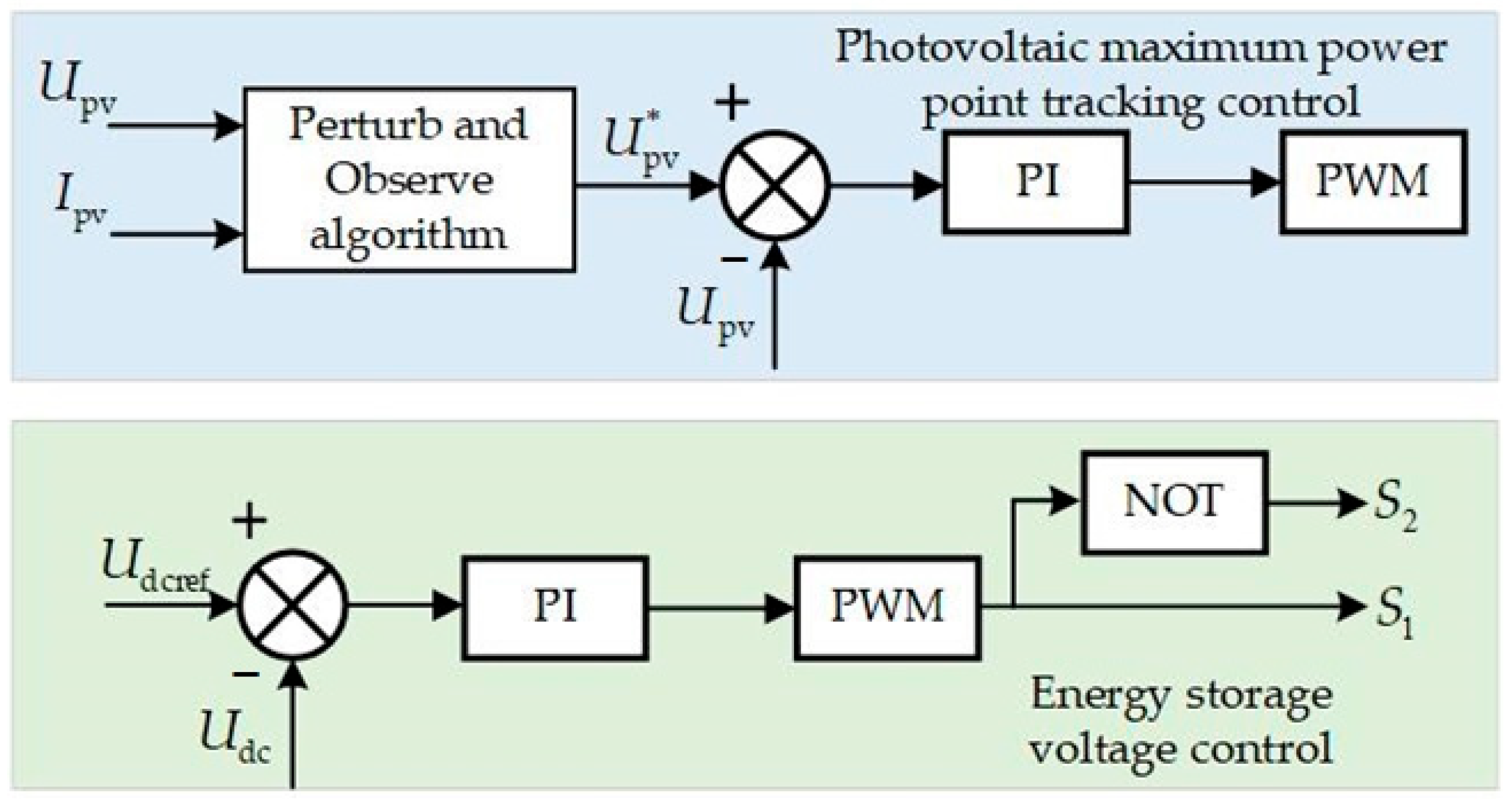
2.1. Topology of the Grid-Forming Photovoltaic System
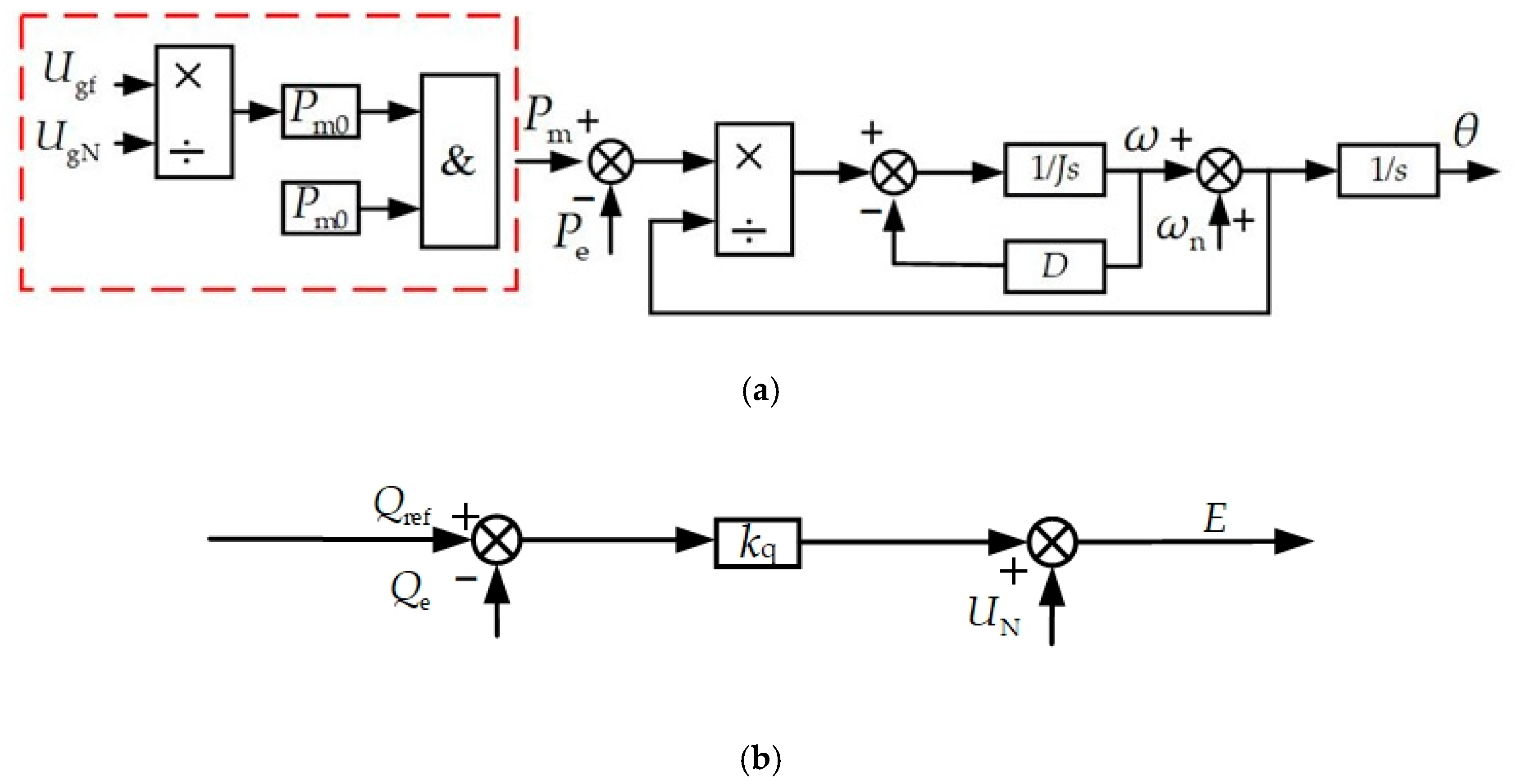
2.2. The Control Strategy
3. The GFM Photovoltaic LVRT Control Strategy
3.1. Inverter Overcurrent Capability Analysis
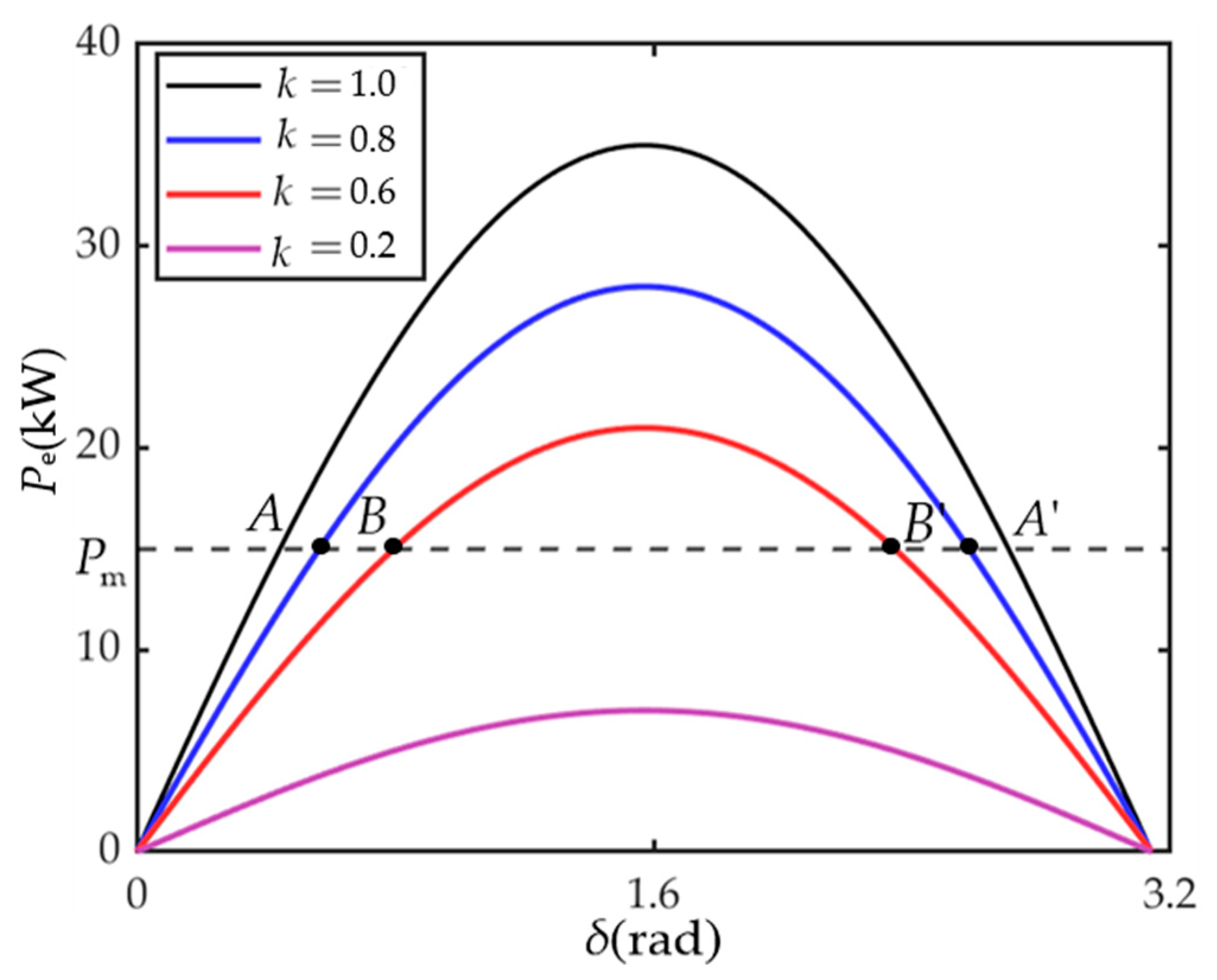
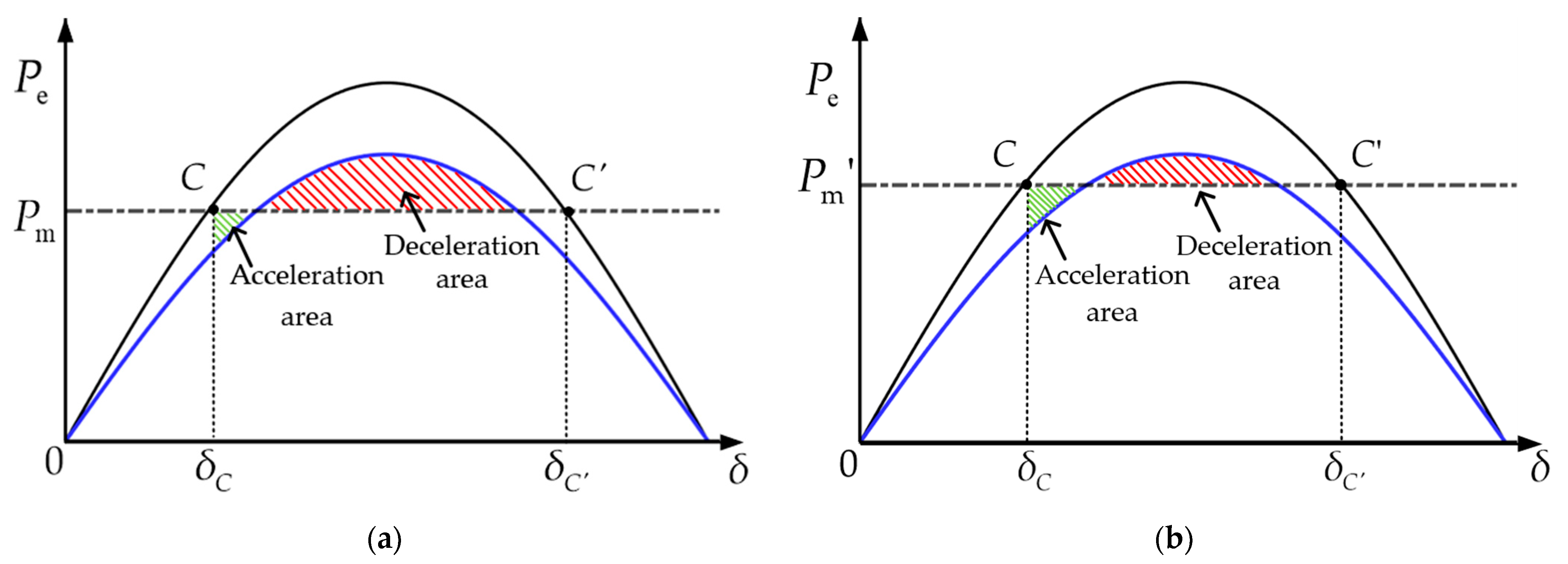
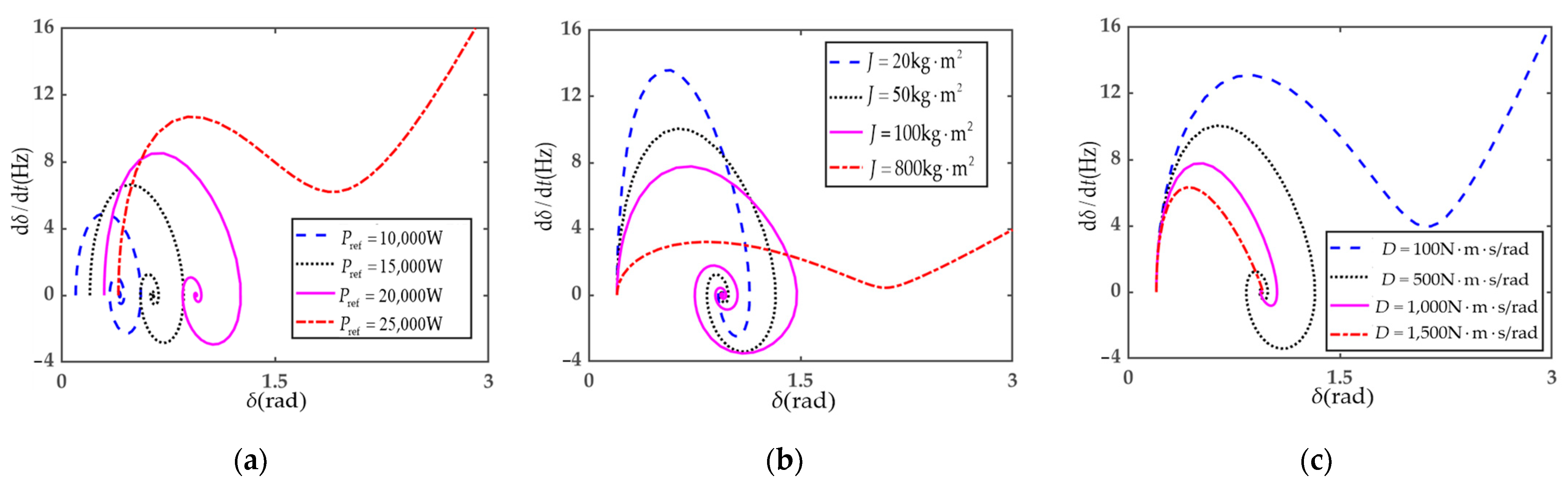
3.2. Power-Angle Stability Analysis
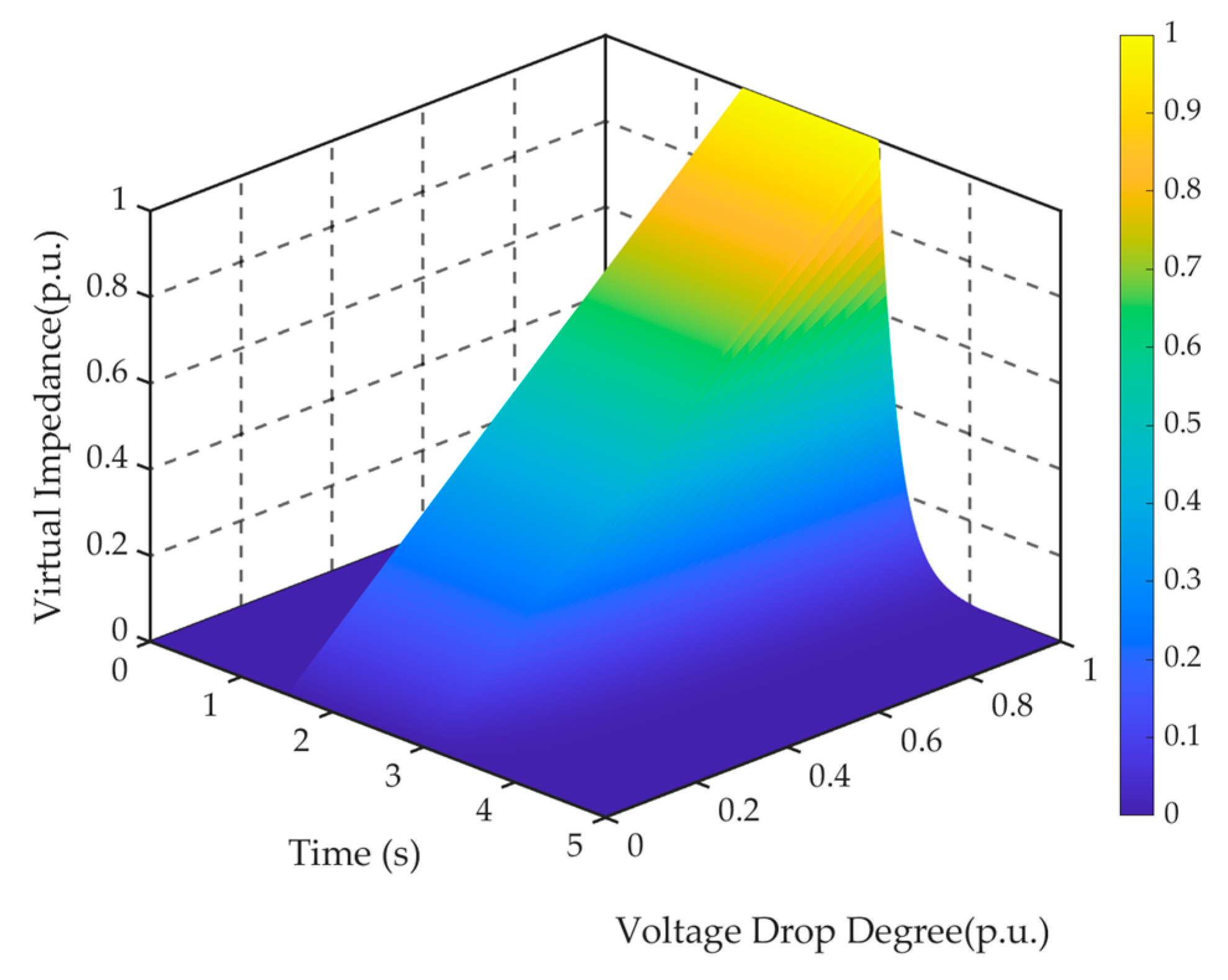
3.3. Dynamic Virtual Impedance Control
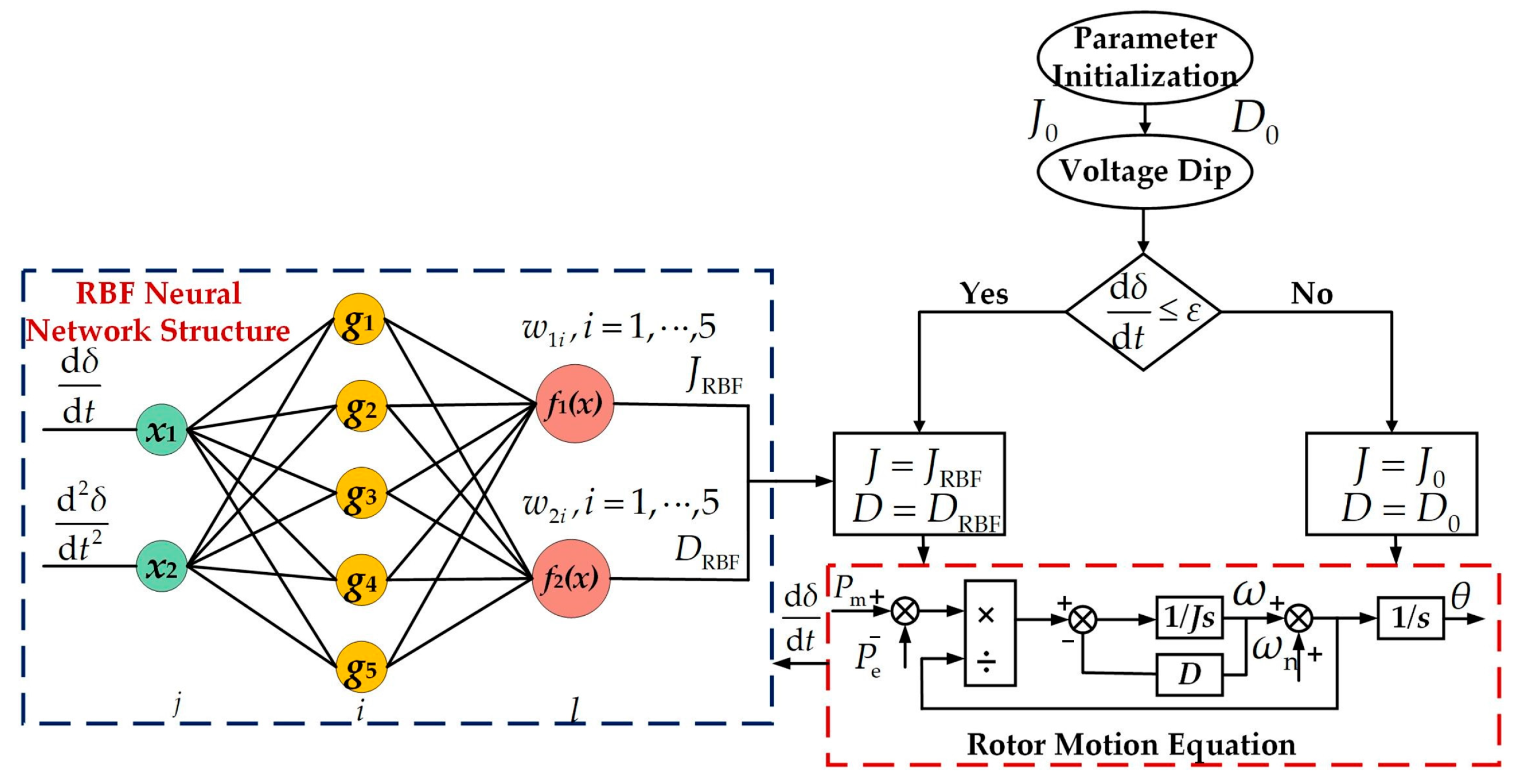
3.4. The Transient Power-Angle Control Strategy Based on RBF Neural Networks
4. Simulation Analysis
4.1. Simulation System
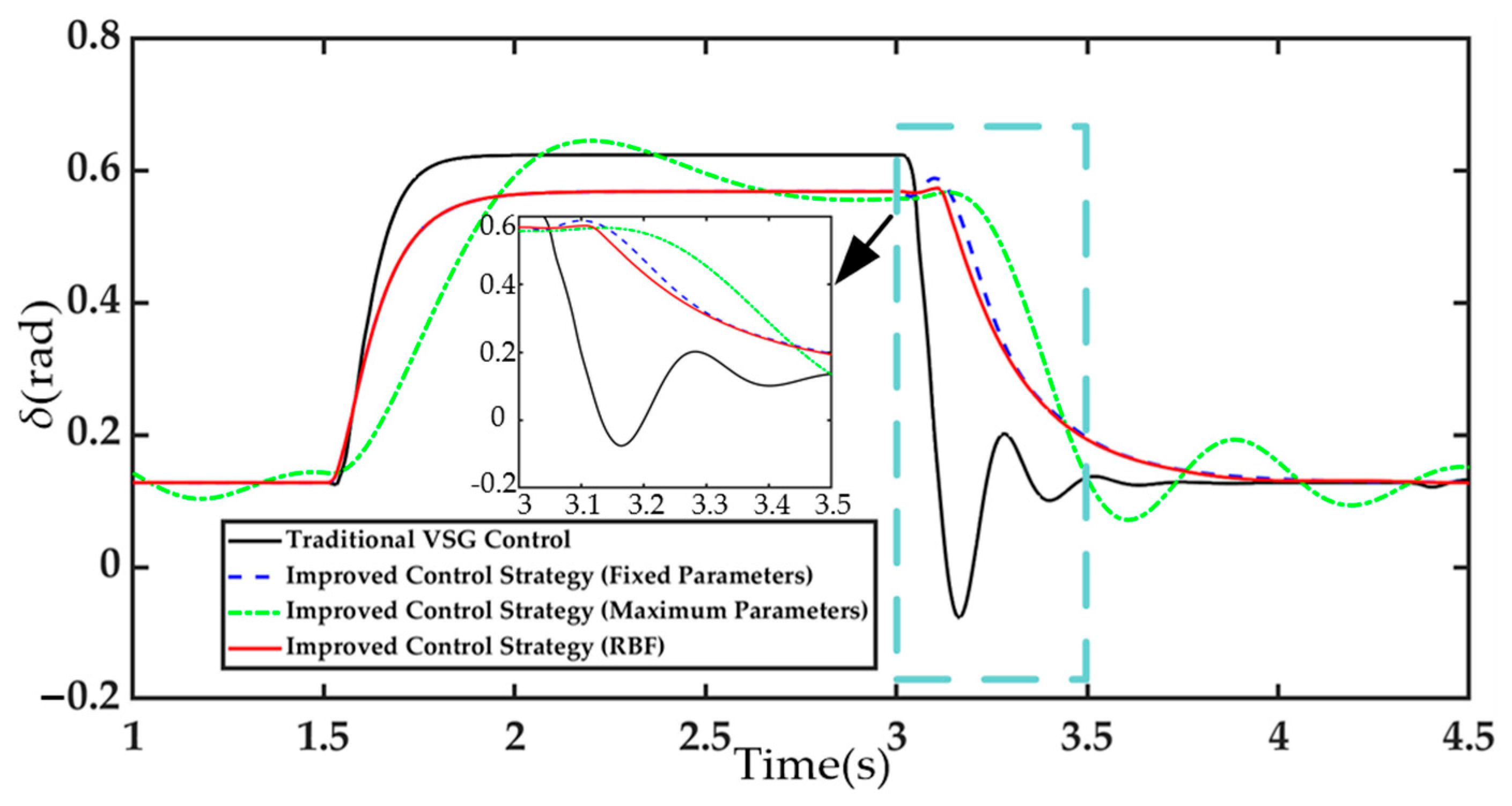
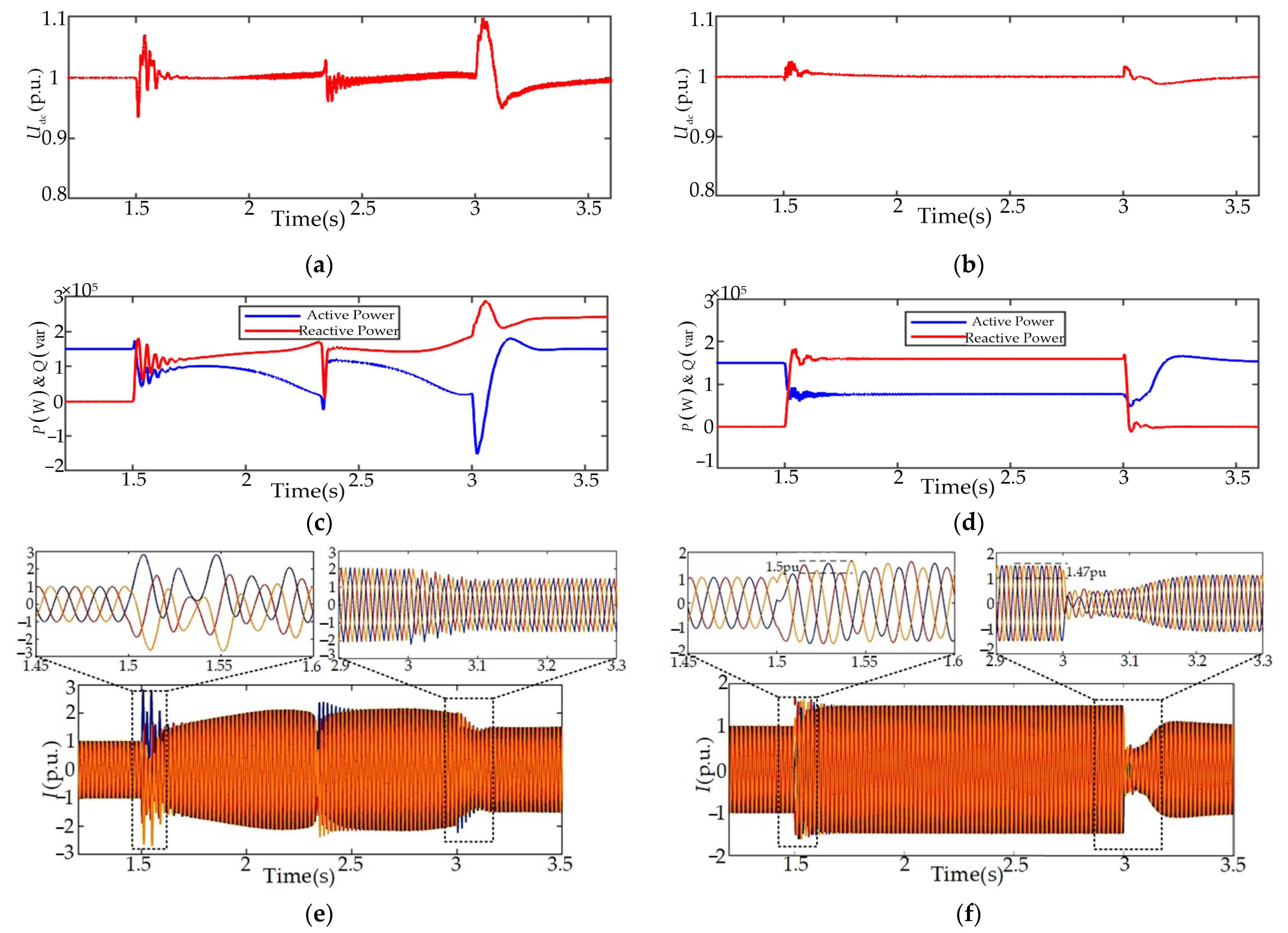
4.2. Validation of the Strategy Under Moderate Voltage Sag
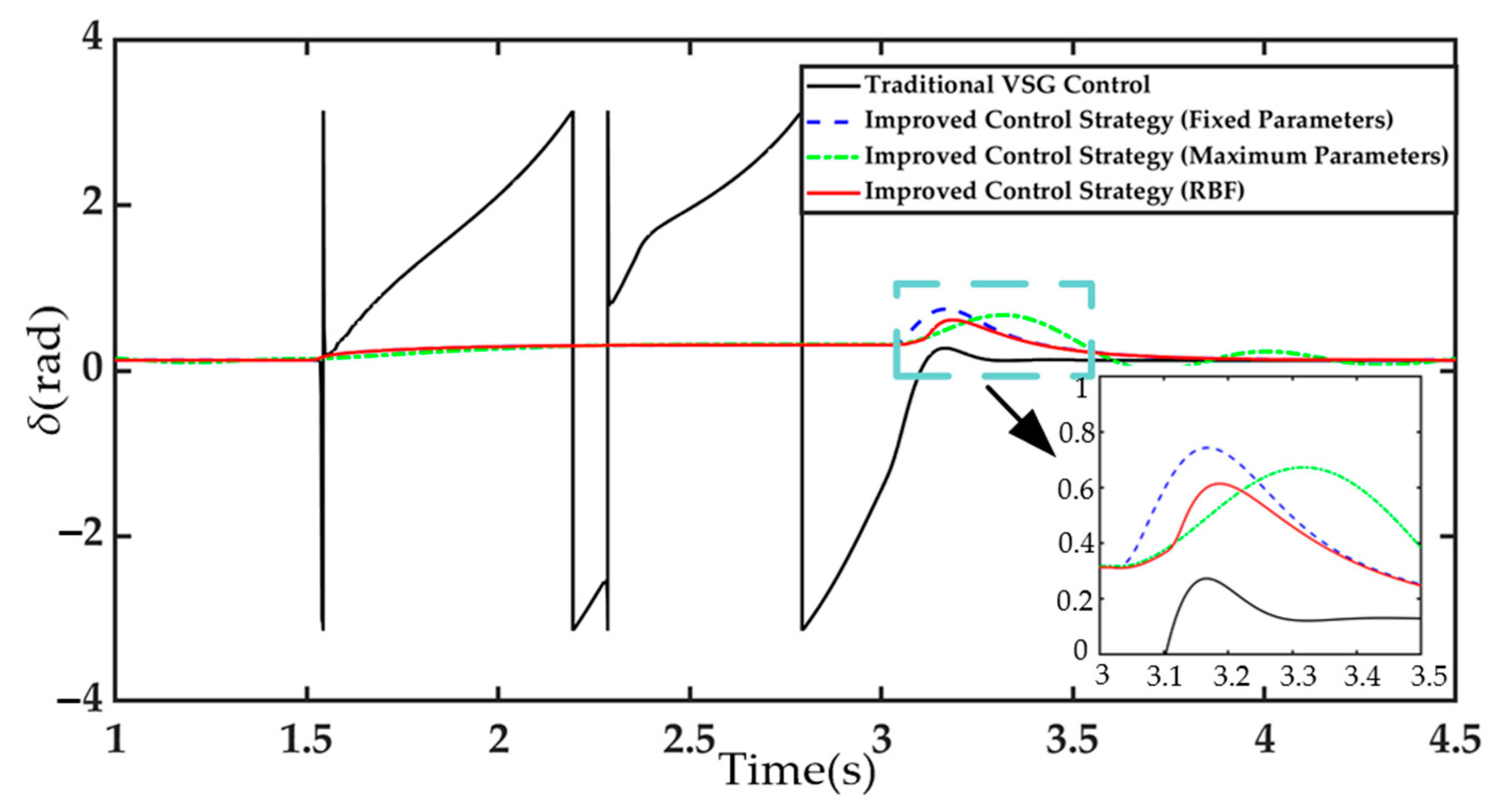
4.3. Validation of the Strategy Under Severe Voltage Sag
5. Conclusions
- (1)
- In the early stages of fault recovery, larger virtual inertia and damping coefficients effectively suppress transient power-angle overshoot. In the mid-recovery period, smaller virtual inertia and damping coefficients improve the power-angle recovery speed.
- (2)
- Virtual impedance helps to suppress transient current surges. Dynamic virtual impedance, which takes into account the voltage sag severity and inverter overcurrent capacity, not only mitigates transient current but also enhances system stability.
- (3)
- The RBF neural network, with its rapid learning capability and adaptive adjustment features, significantly improves transient power-angle recovery characteristics and enhances the system’s transient control performance. Future work will focus on optimizing the RBF neural network-based control strategy to enhance the robustness and recovery speed of the photovoltaic system under asymmetrical fault conditions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhuo, Z.; Zhang, N.; Xie, X.; Li, H.; Kang, C. Key technologies and developing challenges of power system with high proportion of renewable energy. Autom. Electr. Power Syst. 2021, 45, 171–191. (In Chinese) [Google Scholar]
- Yuan, H.; Song, X.; Sun, F.; Xin, X.; Huang, L.; Guan, Z. Analysis of LVRT control strategy-oriented DFIG instability mechanism in weak grid. Electr. Power Autom. Equip. 2020, 40, 50–56. (In Chinese) [Google Scholar]
- Pan, H.C.X.; Huang, H.; Sun, X.; He, D.; Yong, C. Equivalent modeling of LVRT and current limiting links for distributed photovoltaic and wind turbine generators. Electr. Power Autom. Equip. 2022, 42, 3–10. (In Chinese) [Google Scholar]
- Li, H.; Li, S.; Tang, M.; Su, Q. Control strategy of renewable energy inverter considering voltage sag degree under asymmetric faults. Power Syst. Prot. Control. 2023, 51, 21–32. (In Chinese) [Google Scholar]
- Wang, S.; Liu, F.; Zhuang, Y.; Liu, Q.; Huang, Y.; Zha, X. Active-power-command-sharing low-voltage ride-through control strategy for two-stage PV grid-connected system. Electr. Power Autom. Equip. 2023, 43, 99–105. (In Chinese) [Google Scholar]
- Zhang, Z.; Zhang, L.; Wang, B.; Zhou, H. Research on LVRT control strategy for two-stage three-phase grid-connected inverter. Power Electron. 2017, 51, 73–75. (In Chinese) [Google Scholar]
- Naik, K.R.; Rajpathak, B.; Mitra, A.; Kolhe, M.L. Adaptive energy management strategy for sustainable voltage control of PV-hydro-battery integrated DC microgrid. J. Clean. Prod. 2021, 315, 128102, ISSN 0959-6526. [Google Scholar] [CrossRef]
- Naik, K.R.; Rajpathak, B.; Mitra, A.; Kolhe, M.L. Assessment of energy management technique for achieving the sustainable voltage level during grid outage of hydro generator interfaced DC Micro-Grid. Sustain. Energy Technol. Assess. 2021, 46, 101231, ISSN 2213-1388. [Google Scholar] [CrossRef]
- Sebaa, K.; Zhou, Y.; Li, Y.; Gelen, A.; Nouri, H. Low-frequency Oscillation Damping Control for Large-scale Power System with Simplified Virtual Synchronous Machine. J. Mod. Power Syst. Clean. Energy 2021, 9, 1424–1435. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. Control system tuning and stability analysis of Virtual Synchronous Machines. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 2664–2671. [Google Scholar]
- Zhang, K.; Wang, G.; GENG, X.; Jia, Z.; Li, X.; Shen, Y. Distributed cooperative control strategy for grid connected power in ADN with high proportion of PVESS units. J. Electr. Power Sci. Technol. 2022, 37, 147–155. (In Chinese) [Google Scholar]
- Chen, T.; Chen, L.; Zheng, T.; Mei, S. LVRT control method of virtual synchronous generator based on mode smooth switching. Power Syst. Technol. 2016, 40, 2134–2140. (In Chinese) [Google Scholar]
- Chen, L.; Zhang, X.; Dang, X.; Li, J.; Feng, T. Low-voltage ride-through control of photovoltaic virtual synchronous generator using new model prediction. J. Power Supply 2024, 22, 163–172. (In Chinese) [Google Scholar]
- Wang, P.; Wang, P.; Li, K.; Wang, W.; Xu, D. Dynamic current-limiting control strategy of grid-forming inverter under grid faults. High. Volt. Eng. 2022, 48, 3829–3837. (In Chinese) [Google Scholar]
- Wong, Y.C.C.; Lim, C.S.; Cruden, A.; Rotaru, M.D.; Ray, P.K. A Consensus-Based Adaptive Virtual Output Impedance Control Scheme for Reactive Power Sharing in Radial Microgrids. IEEE Trans. Ind. Appl. 2021, 57, 784–794. [Google Scholar] [CrossRef]
- Paquette, A.D.; Divan, D.M. Virtual Impedance Current Limiting for Inverters in Microgrids with Synchronous Generators. IEEE Trans. Ind. Appl. 2015, 51, 1630–1638. [Google Scholar] [CrossRef]
- Jia, K.; Liu, Y.; Bi, T.; Zhang, Y. Asymmetric fault ride-through control of grid-connected renewable energy sources based on adaptive virtual impedance. Proc. CSEE 2024, 44, 1–11. (In Chinese) [Google Scholar]
- Li, Q.; Ge, P.; Xiao, F.; Lan, Z.; Ge, Q. Study on fault ride-through method of VSG based on power angle and current flexible regulation. Proc. CSEE 2020, 40, 2071–2080. (In Chinese) [Google Scholar]
- Li, J.; Wen, B.; Wang, H. Adaptive Virtual Inertia Control Strategy of VSG for Micro-Grid Based on Improved Bang-Bang Control Strategy. IEEE Access 2019, 7, 39509–39514. [Google Scholar] [CrossRef]
- Yang, H.; Jia, Q.; Xiang, L.; Yan, G.; Zhang, S.; Li, X. Virtual inertia control strategies for double-stage photovoltaic power generation. Autom. Electr. Power Syst. 2019, 43, 87–94. (In Chinese) [Google Scholar]
- Li, X.; Jia, Q.; Xiang, L.; Tian, B. Two-stage photovoltaic generation actively participating in grid frequency regulation. Power Syst. Prot. Control. 2019, 47, 100–110. (In Chinese) [Google Scholar]
- Yin, G.; Dong; Dai, Y.; Wang, H.; Wang, S. Adaptive control strategy of VSG parameters in photovoltaic Microgrids. Power Syst. Technol. 2020, 44, 192–199. (In Chinese) [Google Scholar]
- Yao, F.; Zhao, J.; Li, X.; Mao, L.; Qu, K. RBF Neural Network Based Virtual Synchronous Generator Control with Improved Frequency Stability. IEEE Trans. Ind. Inform. 2021, 17, 4014–4024. [Google Scholar] [CrossRef]
- Li, X.; Wang, L.; Yan, N.; Ma, R. Cooperative Dispatch of Distributed Energy Storage in Distribution Network with PV Generation Systems. IEEE Trans. Appl. Supercond. 2021, 31, 8. [Google Scholar] [CrossRef]
- Sher, H.A.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Al-Haddad, K.; Chiaberge, M. A New Sensorless Hybrid MPPT Algorithm Based on Fractional Short-Circuit Current Measurement and P&O MPPT. IEEE Trans. Sustain. Energy 2015, 6, 1426–1434. [Google Scholar]
- Mo, O.; D’Arco, S.; Suul, J.A. Evaluation of Virtual Synchronous Machines with Dynamic or Quasi-Stationary Machine Models. IEEE Trans. Ind. Electron. 2017, 64, 5952–5962. [Google Scholar] [CrossRef]
- Tang, Y.; Tian, Z.; Zha, X.; Li, X.; Huang, M.; Sun, J. An Improved Equal Area Criterion for Transient Stability Analysis of Converter-Based Microgrid Considering Nonlinear Damping Effect. IEEE Trans. Power Electron. 2022, 37, 11272–11284. [Google Scholar] [CrossRef]
- Ma, J.; Ding, X.; Lin, X.; Huang, T.; Wang, Z. Three-phase short circuit current calculation considering converter transient regulation for doubly-fed wind-power generator. Electr. Power Autom. Equip. 2016, 36, 129–136. (In Chinese) [Google Scholar]
- GB/T 19964-2024; Technical requirements for connecting photovoltaic power station to power system. State Administration for Market Regulation: Beijing, China, 2024.
- Gan, M.; Chen, X.-X.; Ding, F.; Chen, G.-Y.; Chen, C.L.P. Adaptive RBF-AR Models Based on Multi-Innovation Least Squares Method. IEEE Signal Process. Lett. 2019, 26, 1182–1186. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, L.; Yu, Y.; MA, B. Coordination and optimization strategy of virtual inertia and damping coefficient of a virtual synchronous generator. Power Syst. Prot. Control. 2022, 50, 88–98. (In Chinese) [Google Scholar]
- Xing, D.; Tian, M. Relationship between frequency characteristics of virtual synchronous generator and parameters of energy storage equipment. Power Syst. Technol. 2021, 45, 3582–3590. (In Chinese) [Google Scholar]
- Lu, S.; Zhu, Y.; Chen, T.; Wang, T.; Wang, N. Adaptive control strategy of damping inertia based on improved particle swarm optimization algorithm. Proc. CSU-EPSA 2024, 36, 68–75. (In Chinese) [Google Scholar]
- Huang, X.; Liang, Q.; Chen, X.; Li, W.; Teng, J. Fuzzy adaptive control strategy for interface converter parameter based on VSG. J. Guangxi Univ. (Nat. Sci. Ed.) 2024, 49, 360–373. (In Chinese) [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategies | Advantages | Disadvantages |
|---|---|---|
| Switching control strategies (MPC) during faults | Based on real-time changes in the grid state, MPC can dynamically adjust control inputs, making it highly optimized and adaptable. | The control strategy is complex, and the switching process may introduce control instability. |
| Dynamic current-limiting control | Uses virtual impedance and power limitations for current limiting. | No analysis of virtual impedance effects under different fault severities. |
| Adaptive adjustment of virtual inertia (bang–bang algorithm) | The algorithm is excellent and adapts to adjust virtual inertia. | Lacks analysis of damping coefficients, abrupt parameter changes destabilize the system. |
| RBF algorithm for adaptive adjustment | The RBF algorithm provides more precise adaptive control of virtual inertia and can effectively handle nonlinear systems, adapting to the complex changes in grid conditions. | Lacks discussion of VSG’s transient characteristics during faults. |
| Symbols | Parameters | Value/Unit |
|---|---|---|
| Rated active power | 15/kW | |
| Rated reactive power | 0 | |
| Grid voltage amplitude | 311/V | |
| DC-side voltage | 1500/V | |
| Current limit | 1.5/pu | |
| Filter inductance | 4/mH | |
| Filter capacitance | ||
| Rated angular speed | 314/rad/s | |
| Rated virtual inertia | 1 kg·m2 | |
| Rated dampingcoefficient | 16/(N·m·s)/rad |
| Control Strategy | ||
|---|---|---|
| Fixed Parameters | 0.54 | 0.82 |
| RBF | 0.52 | 0.79 |
| Control Strategy | ||
|---|---|---|
| Fixed Parameters | 0.43 | 0.61 |
| RBF | 0.26 | 0.61 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Zhang, L.; Song, X.; Kang, W.; Kang, Z. A Transient Control Strategy for Grid-Forming Photovoltaic Systems Based on Dynamic Virtual Impedance and RBF Neural Networks. Electronics 2025, 14, 785. https://doi.org/10.3390/electronics14040785
Yang M, Zhang L, Song X, Kang W, Kang Z. A Transient Control Strategy for Grid-Forming Photovoltaic Systems Based on Dynamic Virtual Impedance and RBF Neural Networks. Electronics. 2025; 14(4):785. https://doi.org/10.3390/electronics14040785
Chicago/Turabian StyleYang, Mingshuo, Lixia Zhang, Xiaoying Song, Wei Kang, and Zhongjian Kang. 2025. "A Transient Control Strategy for Grid-Forming Photovoltaic Systems Based on Dynamic Virtual Impedance and RBF Neural Networks" Electronics 14, no. 4: 785. https://doi.org/10.3390/electronics14040785
APA StyleYang, M., Zhang, L., Song, X., Kang, W., & Kang, Z. (2025). A Transient Control Strategy for Grid-Forming Photovoltaic Systems Based on Dynamic Virtual Impedance and RBF Neural Networks. Electronics, 14(4), 785. https://doi.org/10.3390/electronics14040785