
A VANET, Multi-Hop-Enabled, Dynamic Traffic Assignment for Road Networks



Abstract
1. Introduction
- User equilibrium assignment (UE). The journey times on all the routes used are equal, and less than those which would be experienced by a single vehicle on any unused route.
- System Optimum Assignment (SO). The average journey time is a minimum.
2. Related Works
2.1. Mathematical-Based Models
2.2. Simulation-Based Models
2.3. ACO Related Works
3. Materials and Methods
3.1. Ant Colony Optimization
3.2. The Inspiring Algorithm
- Pheromone Broadcasting: Vehicles disseminate pheromone information to nearby vehicles, facilitating indirect communication.
- Map Awareness: Vehicles can access the road map stored in memory, enabling informed navigation decisions.
- Perceived Edge Costs: Vehicles maintain information on the costs of traversing specific road segments, reflecting current traffic conditions.
- Selfish Shortest Path Computation: Vehicles execute shortest path algorithms in a manner consistent with the Stochastic User Equilibrium (S-UE), prioritizing individually optimal routes.
- Inverse Pheromone Signaling: Higher pheromone intensities denote road segments of lower quality, such as those experiencing congestion or delays.
- Global Pheromone Awareness: Agents make routing decisions based on pheromone concentrations across the entire map, not just at their current location, allowing for a comprehensive assessment of network conditions.
3.3. The Algorithm
- Report-Request Message: Sent by a vehicle experiencing low-speed conditions to solicit speed data from nearby vehicles within the same road segment. This facilitates consensus-building regarding traffic conditions.
- Report Message: Contains the speed information of a vehicle, shared in response to a report-request message, contributing to the collective assessment of traffic flow.
- Traffic-Incident Message: Disseminated when a consensus indicates an adverse traffic condition, alerting other vehicles to incidents causing reduced speeds in the road segment.
- Rebroadcast Message: Scheduled by vehicles upon receiving a traffic-incident message, ensuring widespread dissemination unless another nearby vehicle has already rebroadcasted it, optimizing communication efficiency.
3.3.1. The Base Algorithm
| Algorithm 1. The Base Algorithm | |
| 1: | WHILE the Vehicle is on the road |
| 2: | FOR An aggregation period |
| 3: | Apply evaporation to the map |
| 4: | Calculate moving average speed (avgSpeed) |
| 5: | IF a message is received, THEN |
| 6: | CASE |
| 7: | report-request |
| 8: | IF On the same road segment as the requesting vehicle, THEN |
| 9: | Report Speed |
| 10: | Begin a new aggregation period |
| 11: | traffic-incident |
| 12: | Update map with received pheromone drop |
| 13: | Select the best route available |
| 14: | Set the time to rebroadcast |
| 15: | Place the message in rebroadcast in the queue |
| 16: | Start a new aggregation period |
| 17: | Rebroadcasted message |
| 18: | IF a message with the same ID is in the queue, THEN |
| 19: | Remove the message from the queue |
| 20: | ELSE |
| 21: | Update map with received pheromone drop |
| 22: | Select the best route available |
| 23: | Set the time to rebroadcast |
| 24: | Place message to rebroadcast in queue |
| 25: | Start a new aggregation period |
| 26: | END CASE |
| 27: | END IF |
| 28: | END FOR |
| 29: | IF avgSpeed < speedThreshold THEN |
| 30: | CALL Request Report |
| 31: | END WHILE |
3.3.2. The Rebroadcast Schedule
- tTR becomes smaller as the distance to the incident increases.
- The maximum value of tTR, , occurs when the receiving vehicle is in the exact location of the incident. For our simulations, we chose . This would yield a maximum rebroadcasting time of 10 s.
- Two vehicles on opposite sides of the incident, but at equal distances, would have the same tTR.
3.3.3. The Request-Report Algorithm
- mc: the total number of messages received.
- cc: the count of vehicles in consensus, defined as those with speeds below a specified threshold (speedThreshold).
- ras: the received average speed.
- fftt: free-flow travel time, computed by dividing the road segment length by the speed limit.
- avgtt: average travel time, calculated by dividing the road segment length by ras.
| Algorithm 2. The Request-Report Algorithm | |
| 1: | Begin a new aggregation period |
| 2: | Send a request-report message |
| 3: | FOR One aggregation period |
| 4: | IF A response message to the request is received, THEN |
| 5: | IF the received speed is under the speed threshold |
| 6: | Increase the consensus count “cc” |
| 7: | Increase the message count “mc“ |
| Include the received speed in the received average speed “ras” | |
| 8: | ELSE |
| 9: | Increase the message count “mc“ |
| 10: | END FOR |
| 11: | Calculate consensus ratio “cr = cc/mc” |
| 12: | IF cr > consensusThreshold |
| 13: | Calculate the pheromone drop “fd” |
| 14: | Send a Traffic-Incident message with fd, vehicle ID, and road segment ID |
| 30: | RETURN |
3.4. Simulation Framework
4. Results
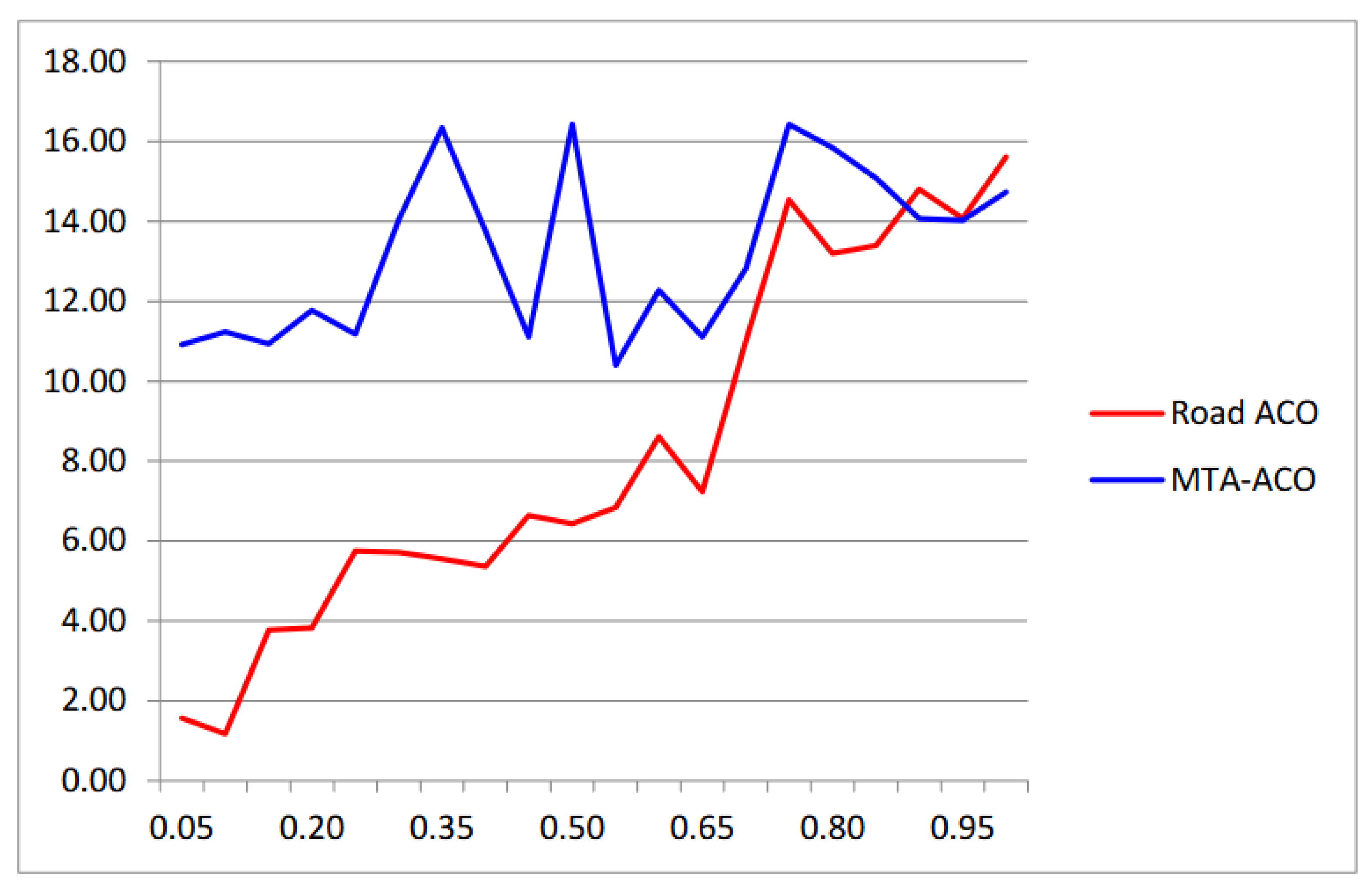
4.1. Simulation Results for Aggregation Period of 10 s
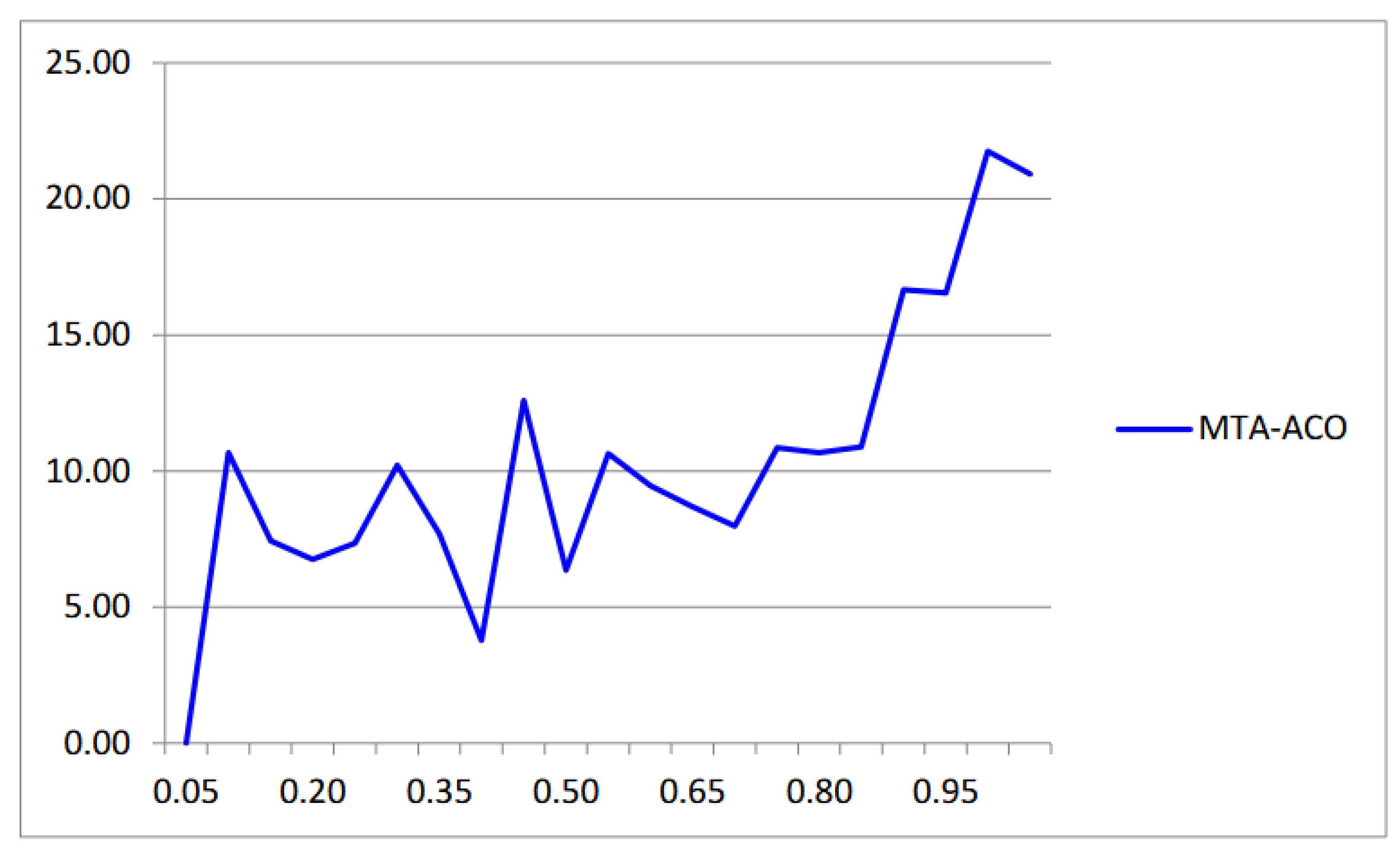
4.2. Simulation Results for Aggregation Period of 2 s
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Schrank, D.; Albert, L.; Jha, K.; Eisele, B. 2023 URBAN MOBILITY REPORT. Texas A&M Transportation Institute, Jun. 2024. Available online: https://static.tti.tamu.edu/tti.tamu.edu/documents/mobility-report-2023.pdf (accessed on 30 January 2024).
- Dutta, A.; Campoverde, L.M.S.; Tropea, M.; De Rango, F. A Comprehensive Review of Recent Developments in VANET for Traffic, Safety & Remote Monitoring Applications. J. Netw. Syst. Manag. 2024, 32, 73. [Google Scholar] [CrossRef]
- Wang, Y.; Zen, H.; Sabri, M.F.M.; Wang, X.; Kho, L.C. Towards Strengthening the Resilience of IoV Networks—A Trust Management Perspective. Future Internet 2022, 14, 202. [Google Scholar] [CrossRef]
- Amin-Naseri, M. Adopting and Incorporating Crowdsourced Traffic Data in Advanced Transportation Management Systems. Ph.D. Thesis, Iowa State University, Ames, IA, USA, 2018. [Google Scholar]
- D’Andrea, E.; Marcelloni, F. Detection of traffic congestion and incidents from GPS trace analysis. Expert Syst. Appl. 2017, 73, 43–56. [Google Scholar] [CrossRef]
- Hancock, J.; Ren, J. Accurate Traffic State Prediction with Deep Learning—Analyzing Statistical Aides for Identifying Anomalous Traffic Trends. In Proceedings of the 2024 IEEE 30th International Conference on Parallel and Distributed Systems (ICPADS), Belgrade, Serbia, 10–14 October 2024; pp. 408–414. [Google Scholar] [CrossRef]
- Hassan, M.U.; Al-Awady, A.A.; Ali, A.; Sifatullah; Akram, M.; Iqbal, M.M.; Khan, J.; Ali, Y.A.A. ANN-Based Intelligent Secure Routing Protocol in Vehicular Ad Hoc Networks (VANETs) Using Enhanced AODV. Sensors 2024, 24, 818. [Google Scholar] [CrossRef]
- Hamdi, M.M.; Al-Dosary, O.A.R.; Alrawi, O.A.S.; Mustafa, A.S.; Abood, M.S.; Noori, M.S. An overview of challenges for data dissemination and routing protocols in VANETs. In Proceedings of the 2021 3rd International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 11–13 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Limouchi, E.; Mahgoub, I. Volunteers dilemma game inspired broadcast scheme for vehicular ad hoc networks. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4439–4449. [Google Scholar] [CrossRef]
- Slavik, M.; Mahgoub, I. Statistical broadcast protocol design for unreliable channels in wireless ad-hoc networks. In Proceedings of the 2010 IEEE Global Telecommunications Conference GLOBECOM 2010, Miami, FL, USA, 6–10 December 2010; pp. 1–5. [Google Scholar]
- Slavik, M.; Mahgoub, I. Spatial Distribution and Channel Quality Adaptive Protocol for Multihop Wireless Broadcast Routing in VANET. IEEE Trans. Mob. Comput. 2013, 12, 722–734. [Google Scholar] [CrossRef]
- Rathod, M.; Mahgoub, I.; Slavik, M. A hybrid data dissemination scheme for VANETs. In Proceedings of the 2011 IFIP Wireless Days (WD), Niagara Falls, ON, Canada, 10–12 October 2011; pp. 1–7. [Google Scholar]
- Slavik, M.; Mahgoub, I. Stochastic Broadcast for VANET. In Proceedings of the 2010 7th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 9–12 January 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Limouchi, E.; Mahgoub, I.; Alwakeel, A. Fuzzy logic-based broadcast in vehicular ad hoc networks. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–5. [Google Scholar]
- Marwah, G.P.K.; Jain, A.; Malik, P.K.; Singh, M.; Tanwar, S.; Safirescu, C.O.; Mihaltan, T.C.; Sharma, R.; Alkhayyat, A. An Improved Machine Learning Model with Hybrid Technique in VANET for Robust Communication. Mathematics 2022, 10, 4030. [Google Scholar] [CrossRef]
- Sabbagh, A.A.; Shcherbakov, M.V. A Secure and Stable Routing Protocol for VANET Under Malicious Attacks. In Creativity in Intelligent Technologies and Data Science; Kravets, A.G., Shcherbakov, M., Parygin, D., Groumpos, P.P., Eds.; Communications in Computer and Information Science; Springer International Publishing: Cham, Switzerland, 2021; Volume 1448, pp. 421–435. [Google Scholar] [CrossRef]
- Alzamzami, O.; Mahgoub, I. Fuzzy logic-based geographic routing for urban vehicular networks using link quality and achievable throughput estimations. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2289–2300. [Google Scholar] [CrossRef]
- Wahid, I.; Ikram, A.A.; Ahmad, M.; Ali, S.; Ali, A. State of the art routing protocols in VANETs: A review. Procedia Comput. Sci. 2018, 130, 689–694. [Google Scholar] [CrossRef]
- Boussoufa-Lahlah, S.; Semchedine, F.; Bouallouche-Medjkoune, L. Geographic routing protocols for Vehicular Ad hoc NETworks (VANETs): A survey. Veh. Commun. 2018, 11, 20–31. [Google Scholar] [CrossRef]
- Agarwal, R.K.; Mathuria, M.; Sharma, M. Study of Routing Algorithms in DTN Enabled Vehicular Ad-Hoc Network. Int. J. Comput. Appl. 2017, 159, 1–6. [Google Scholar]
- Alalwany, E.; Mahgoub, I. Security and trust management in the internet of vehicles (IoV): Challenges and machine learning solutions. Sensors 2024, 24, 368. [Google Scholar] [CrossRef] [PubMed]
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. VANet security challenges and solutions: A survey. Veh. Commun. 2017, 7, 7–20. [Google Scholar] [CrossRef]
- Samara, G.; Al-Raba’nah, Y. Security Issues in Vehicular Ad Hoc Networks (VANET): A survey. arXiv 2017, arXiv:1712.04263. [Google Scholar]
- Sakiz, F.; Sen, S. A survey of attacks and detection mechanisms on intelligent transportation systems: VANETs and IoV. Ad Hoc Netw. 2017, 61, 33–50. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, C.; Sheng, S.; Xu, Y.; Jia, Y. Stop Line Aided Cooperative Positioning of Connected Vehicles. arXiv 2021, arXiv:2112.13369. [Google Scholar] [CrossRef]
- Günay, F.B.; Öztürk, E.; Çavdar, T.; Hanay, Y.S.; Khan, A.U.R. Vehicular Ad Hoc Network (VANET) Localization Techniques: A Survey. Arch. Comput. Methods Eng. 2021, 28, 3001–3033. [Google Scholar] [CrossRef]
- Chehri, A.; Quadar, N.; Saadane, R. Communication and Localization Techniques in VANET Network for Intelligent Traffic System in Smart Cities: A Review. In Smart Transportation Systems 2020; Qu, X., Zhen, L., Howlett, R.J., Jain, L.C., Eds.; Springer: Singapore, 2020; pp. 167–177. [Google Scholar] [CrossRef]
- An, P.; J, P.; S, S.; Kumar, S.; R, G. Malicious Node Detection in VANETs via Enhanced DSR and ML. In Proceedings of the 2024 International Conference on Wireless Communications Signal Processing and Networking (WiSPNET), Chennai, India, 21–23 March 2024; pp. 1–7. [Google Scholar] [CrossRef]
- Rashid, K.; Saeed, Y.; Ali, A.; Jamil, F.; Alkanhel, R.; Muthanna, A. An Adaptive Real-Time Malicious Node Detection Framework Using Machine Learning in Vehicular Ad-Hoc Networks (VANETs). Sensors 2023, 23, 2594. [Google Scholar] [CrossRef]
- Sultan, S.; Javaid, Q.; Malik, A.J.; Al-Turjman, F.; Attique, M. Collaborative-trust approach toward malicious node detection in vehicular ad hoc networks. Environ. Dev. Sustain. 2022, 24, 7532–7550. [Google Scholar] [CrossRef]
- Arshad, M.; Ullah, Z.; Ahmad, N.; Khalid, M.; Criuckshank, H.; Cao, Y. A survey of local/cooperative-based malicious information detection techniques in VANETs. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 62. [Google Scholar] [CrossRef]
- Sharma, S.; Kaul, A. A survey on Intrusion Detection Systems and Honeypot based proactive security mechanisms in VANETs and VANET Cloud. Veh. Commun. 2018, 12, 138–164. [Google Scholar] [CrossRef]
- Roocroft, A.; Punzo, G.; Ramli, M.A. Link Count Data-driven Static Traffic Assignment Models Through Network Modularity Partitioning. arXiv 2022, arXiv:2211.13514. [Google Scholar]
- Guidoni, D.L.; Maia, G.; Souza, F.S.H.; Villas, L.A.; Loureiro, A.A.F. Vehicular Traffic Management Based on Traffic Engineering for Vehicular Ad Hoc Networks. IEEE Access 2020, 8, 45167–45183. [Google Scholar] [CrossRef]
- Zhang, W.; Aung, N.; Dhelim, S.; Ai, Y. DIFTOS: A Distributed Infrastructure-Free Traffic Optimization System Based on Vehicular Ad Hoc Networks for Urban Environments. Sensors 2018, 18, 2567. [Google Scholar] [CrossRef]
- Pan, J.S.; Popa, I.S.; Borcea, C. Divert: A distributed vehicular traffic re-routing system for congestion avoidance. IEEE Trans. Mob. Comput. 2017, 16, 58–72. [Google Scholar] [CrossRef]
- Soares, P.H. Zone-based public transport route optimisation in an urban network. Public Transp. 2021, 13, 197–231. [Google Scholar] [CrossRef]
- Cox, T.; Thulasiraman, P. A zone-based traffic assignment algorithm for scalable congestion reduction. ICT Express 2017, 3, 204–208. [Google Scholar] [CrossRef]
- Liao, X.-C.; Qiu, W.-J.; Wei, F.-F.; Chen, W.-N. Combining Traffic Assignment and Traffic Signal Control for Online Traffic Flow Optimization. In Neural Information Processing; Tanveer, M., Agarwal, S., Ozawa, S., Ekbal, A., Jatowt, A., Eds.; Springer Nature: Singapore, 2023; pp. 150–163. [Google Scholar] [CrossRef]
- Chai, H.; Zhang, H.M.; Ghosal, D.; Chuah, C.-N. Dynamic traffic routing in a network with adaptive signal control. Transp. Res. Part C: Emerg. Technol. 2017, 85, 64–85. [Google Scholar] [CrossRef]
- Arellano, W.; Mahgoub, I. Reverse Online Algorithm for the Dynamic Traffic Assignment inspired by Ant Colony Optimization for VANETs. Int. J. Swarm Intel. Evol. Comput. 2014, 3, 2. [Google Scholar]
- Wardrop, J.G. Road paper. Some theoretical aspects of road traffic research. Proc. Inst. Civ. Eng. 1952, 1, 325–362. [Google Scholar] [CrossRef]
- Correa, J.R.; Schulz, A.S.; Stier-Moses, N.E. Selfish routing in capacitated networks. Math. Oper. Res. 2004, 29, 961–976. [Google Scholar] [CrossRef]
- Beckmann, M.; McGuire, C.B.; Winsten, C.B. Studies in the Economics of Transportation. 1956. Available online: http://trid.trb.org/view.aspx?id=91120 (accessed on 30 January 2024).
- Boyce, D. Beckmann’s transportation network equilibrium model: Its history and relationship to the Kuhn–Tucker conditions. Econ. Transp. 2013, 2, 47–52. [Google Scholar] [CrossRef]
- Frank, M.; Wolfe, P. An algorithm for quadratic programming. Nav. Res. Logist. Q. 1956, 3, 95–110. [Google Scholar] [CrossRef]
- LeBlanc, L.J.; Morlok, E.K.; Pierskalla, W.P. An efficient approach to solving the road network equilibrium traffic assignment problem. Transp. Res. 1975, 9, 309–318. [Google Scholar] [CrossRef]
- Yagar, S. Dynamic traffic assignment by individual path minimization and queuing. Transp. Res. 1971, 5, 179–196. [Google Scholar] [CrossRef]
- Homburger, W.S. Traffic Estimation: Computer Programs for Educational Purposes (Course Notes); Institute of Transportation and Traffic Engineering, University of California: Berkeley, CA, USA, 1969. [Google Scholar]
- Merchant, D.K.; Nemhauser, G.L. A Model and an Algorithm for the Dynamic Traffic Assignment Problems. Transp. Sci. 1978, 12, 183–199. [Google Scholar] [CrossRef]
- Peeta, S.; Ziliaskopoulos, A.K. Foundations of dynamic traffic assignment: The past, the present and the future. Netw. Spat. Econ. 2001, 1, 233–265. [Google Scholar] [CrossRef]
- Arellano, W.; Mahgoub, I. Swarm Intelligence-Inspired Routing Algorithms for Ad Hoc Wireless Networks. In Encyclopedia of Wireless and Mobile Communications, 2nd ed.; Furht, B., Ed.; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Pauer, G.; Török, Á. Improving Highly Automated Traffic Management Models Using Alternative Graph Structures Simultaneously. Appl. Sci. 2024, 14, 484. [Google Scholar] [CrossRef]
- Goyal, R.; Elawadhi, O.; Sharma, A.; Bhutani, M.; Jain, A. Cloud-connected central unit for traffic control: Interfacing sensing units and centralized control for efficient traffic management. Int. J. Inf. Tecnol. 2024, 16, 841–851. [Google Scholar] [CrossRef]
- Nguyen, T.-H.; Jung, J.J. ACO-based traffic routing method with automated negotiation for connected vehicles. Complex Intell. Syst. 2023, 9, 625–636. [Google Scholar] [CrossRef]
- Kumarasamy, V.K.; Saroj, A.J.; Liang, Y.; Wu, D.; Hunter, M.P.; Guin, A.; Sartipi, M. Integration of Decentralized Graph-Based Multi-Agent Reinforcement Learning with Digital Twin for Traffic Signal Optimization. Symmetry 2024, 16, 448. [Google Scholar] [CrossRef]
- Lilhore, U.K.; Imoize, A.L.; Li, C.-T.; Simaiya, S.; Pani, S.K.; Goyal, N.; Kumar, A.; Lee, C.-C. Design and Implementation of an ML and IoT Based Adaptive Traffic-Management System for Smart Cities. Sensors 2022, 22, 2908. [Google Scholar] [CrossRef] [PubMed]
- Akabane, A.T.; Immich, R.; Bittencourt, L.F.; Madeira, E.R.M.; Villas, L.A. Towards a distributed and infrastructure-less vehicular traffic management system. Comput. Commun. 2020, 151, 306–319. [Google Scholar] [CrossRef]
- Dion, F.; Hellinga, B. A rule-based real-time traffic responsive signal control system with transit priority: Application to an isolated intersection. Transp. Res. Part B Methodol. 2002, 36, 325–343. [Google Scholar] [CrossRef]
- Martí, I.; Tomás, V.R.; García, L.A.; Martínez, J.J. A Rule-Based Multi-agent System for Local Traffic Management. In Intelligent Data Engineering and Automated Learning—IDEAL 2009; Corchado, E., Yin, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 502–509. [Google Scholar] [CrossRef]
- Peeta, S. System Optimal Dynamic Traffic Assignment in Congested Networks with Advanced Information Systems. Ph.D. Dissertation, University of Texas at Austin, Austin, TX, USA, 1994. [Google Scholar]
- Lin, J.; Hu, Q.; Lin, W.; Tan, M. Risk and resilience-based restoration optimization of transportation infrastructures under uncertainty. PLoS ONE 2024, 19, e0308138. [Google Scholar] [CrossRef]
- Wigan, M.R. Benefit Assessment for Network Traffic Models and Application to Road Pricing. 1971. Available online: https://trid.trb.org/View/89838 (accessed on 30 January 2024).
- Nagel, K.; Barrett, C.L. Using microsimulation feedback for trip adaptation for realistic traffic in Dallas. Int. J. Mod. Phys. C 1997, 8, 505–525. [Google Scholar] [CrossRef]
- Zhao, S.; Liu, L.; Zhao, P. Traffic assignment in urban transportation network problem with emission constraints in China: A cooperative game theory. Environ. Sci. Pollut. Res. 2023, 30, 69274–69288. [Google Scholar] [CrossRef]
- Hollander, Y.; Prashker, J.N. The applicability of non-cooperative game theory in transport analysis. Transportation 2006, 33, 481–496. [Google Scholar] [CrossRef]
- Chen, O.; Ben-Akiva, M. Game-Theoretic Formulations of Interaction Between Dynamic Traffic Control and Dynamic Traffic Assignment. Transp. Res. Rec. J. Transp. Res. Board 1998, 1617, 179–188. [Google Scholar] [CrossRef]
- Huang, J.; Tan, Q.; Qi, R.; Li, H. RELight: A random ensemble reinforcement learning based method for traffic light control. Appl. Intell. 2024, 54, 95–112. [Google Scholar] [CrossRef]
- Azad, S.M.M.; Ramazani, A. Smart control of traffic lights based on traffic density in the multi-intersection network by using Q learning. Discov. Artif. Intell. 2023, 3, 39. [Google Scholar] [CrossRef]
- Rojo, M. Evaluation of Traffic Assignment Models through Simulation. Sustainability 2020, 12, 5536. [Google Scholar] [CrossRef]
- Fafoutellis, P.; Vlahogianni, E.I. Unlocking the Full Potential of Deep Learning in Traffic Forecasting Through Road Network Representations: A Critical Review. Data Sci. Transp. 2023, 5, 23. [Google Scholar] [CrossRef]
- Benarmas, R.B.; Bey, K.B. A deep learning-based framework for road traffic prediction. J. Supercomput. 2024, 80, 6891–6916. [Google Scholar] [CrossRef]
- Ben-Akiva, M.; Bierlaire, M.; Burton, D.; Koutsopoulos, H.N.; Mishalani, R. Network state estimation and prediction for real-time traffic management. Netw. Spat. Econ. 2001, 1, 293–318. [Google Scholar] [CrossRef]
- Nie, Z.-H.; Yang, Q.; Zhang, E.; Liu, D.; Zhang, J. Ant Colony optimization for Electric Vehicle Routing Problem with Capacity and Charging Time Constraints. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; pp. 480–485. [Google Scholar] [CrossRef]
- Zhao, M. Application of an Improved Ant Colony Algorithm in Vehicle Routing Problem. In Proceedings of the 2023 4th International Conference on Computer Engineering and Intelligent Control (ICCEIC), Guangzhou, China, 20–22 October 2023; pp. 270–273. [Google Scholar] [CrossRef]
- Mavrovouniotis, M.; Ellinas, G.; Li, C.; Polycarpou, M. A Multiple Ant Colony System for the Electric Vehicle Routing Problem with Time Windows. In Proceedings of the 2022 IEEE Symposium Series on Computational Intelligence (SSCI), Singapore, 4–7 December 2022; pp. 796–803. [Google Scholar] [CrossRef]
- Soon, K.L.; Lim, J.M.-Y.; Parthiban, R.; Ho, M.C. Proactive eco-friendly pheromone-based green vehicle routing for multi-agent systems. Expert Syst. Appl. 2019, 121, 324–337. [Google Scholar] [CrossRef]
- S, S.S. and V, C.S.S. A Multi-agent Ant Colony Optimization Algorithm for Effective Vehicular Traffic Management. In Advances in Swarm Intelligence; Tan, Y., Shi, Y., Tuba, M., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 640–647. [Google Scholar] [CrossRef]
- Pérez-Carabaza, S.; Gálvez, A.; Iglesias, A. Extended Rank-Based Ant Colony Optimization Algorithm for Traveling Salesman Problem. In 18th International Conference on Soft Computing Models in Industrial and Environmental Applications (SOCO 2023); Bringas, P.G., García, H.P., de Pisón, F.J.M., Álvarez, F.M., Lora, A.T., Herrero, Á., Rolle, J.L.C., Quintián, H., Corchado, E., Eds.; Springer Nature: Cham, Switzerland, 2023; pp. 13–23. [Google Scholar] [CrossRef]
- Dorigo, M. Optimization, Learning and Natural Algorithms. Ph.D. Thesis, Politecnico di Milano, Milan, Italy, 1992. Available online: http://ci.nii.ac.jp/naid/10016599043/ (accessed on 3 May 2014).
- Dorigo, M.; Stützle, T. Ant Colony Optimization, 1st ed.; MIT Press: Cambridge, MA, USA, 2004; Available online: https://mitpress.mit.edu/9780262042192/ant-colony-optimization/ (accessed on 30 January 2024).
- Sommer, C. Veins-Vehicles in Network Simulation. Available online: https://veins.car2x.org/ (accessed on 8 December 2024).
- Sommer, C.; Yao, Z.; German, R.; Dressler, F. Simulating the influence of IVC on road traffic using bidirectionally coupled simulators. In Proceedings of the IEEE INFOCOM Workshops 2008, Phoenix, AZ, USA, 13–18 April 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Eclipse SUMO-Simulation of Urban MObility. Available online: https://www.eclipse.dev/sumo/ (accessed on 8 December 2024).
- OMNeT++ Discrete Event Simulator. Available online: https://omnetpp.org/ (accessed on 8 December 2024).
- Manhattan Grid—An Overview|ScienceDirect Topics. Available online: https://www.sciencedirect.com/topics/computer-science/manhattan-grid (accessed on 3 January 2025).
- Papaleondiou, L.G.; Dikaiakos, M.D. Trafficmodeler: A graphical tool for programming microscopic traffic simulators through high-level abstractions. In Proceedings of the VTC Spring 2009—IEEE 69th Vehicular Technology Conference, Barcelona, Spain, 26–29 April 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Arellano, W.; Mahgoub, I. Traffic Modeler extensions: A case for rapid VANET simulation using OMNET++, SUMO, and VEINS. In Proceedings of the 2013 High Capacity Optical Networks and Emerging/Enabling Technologies, Magosa, Cyprus, 11–13 December 2013; pp. 109–115. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Travel Time Gains | ||||
|---|---|---|---|---|
| Aggregation Period of 10 s | Aggregation Period of 2 s | |||
| System | MTA-ACO | Road-ACO | MTA-ACO | Road-ACO |
| 500 | 16% | 14% | 42% | 25% |
| 1000 | 16% | 16% | N/A | N/A |
| 1750 | 1.20% | N/A | 42% | 0% |
| 4000 | N/A | N/A | 22% | 0% |
| 8000 | N/A | N/A | 0% | % |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arellano, W.; Mahgoub, I. A VANET, Multi-Hop-Enabled, Dynamic Traffic Assignment for Road Networks. Electronics 2025, 14, 559. https://doi.org/10.3390/electronics14030559
Arellano W, Mahgoub I. A VANET, Multi-Hop-Enabled, Dynamic Traffic Assignment for Road Networks. Electronics. 2025; 14(3):559. https://doi.org/10.3390/electronics14030559
Chicago/Turabian StyleArellano, Wilmer, and Imad Mahgoub. 2025. "A VANET, Multi-Hop-Enabled, Dynamic Traffic Assignment for Road Networks" Electronics 14, no. 3: 559. https://doi.org/10.3390/electronics14030559
APA StyleArellano, W., & Mahgoub, I. (2025). A VANET, Multi-Hop-Enabled, Dynamic Traffic Assignment for Road Networks. Electronics, 14(3), 559. https://doi.org/10.3390/electronics14030559