
Efficient Threshold Attribute-Based Signature Scheme for Unmanned Aerial Vehicle (UAV) Networks


Abstract
1. Introduction
1.1. Problem Statement
1.2. Our Contributions
1.3. Organization of the Remainder of the Paper
2. Related Work
2.1. Security Solutions for UAV Networks
2.2. Attribute-Based Signature Schemes
3. Preliminaries
3.1. Complexity Assumption
3.2. Lagrange Interpolation
4. Formal Model and Security Model of a t-ABPS Scheme
4.1. Formal Model of a t-ABPS Scheme
4.2. Security Model of a t-ABPS Scheme
Unforgeability
- has not previously submitted any to such that .
- has not previously submitted the pair (, ) to .
- has not previously submitted the tuple (, , ) to .
- The signature is valid.
- has not previously submitted any to such that .
- has not previously submitted the triplet (, , ) to .
- The signature is valid.
5. t-ABPS Scheme for UAV Networks
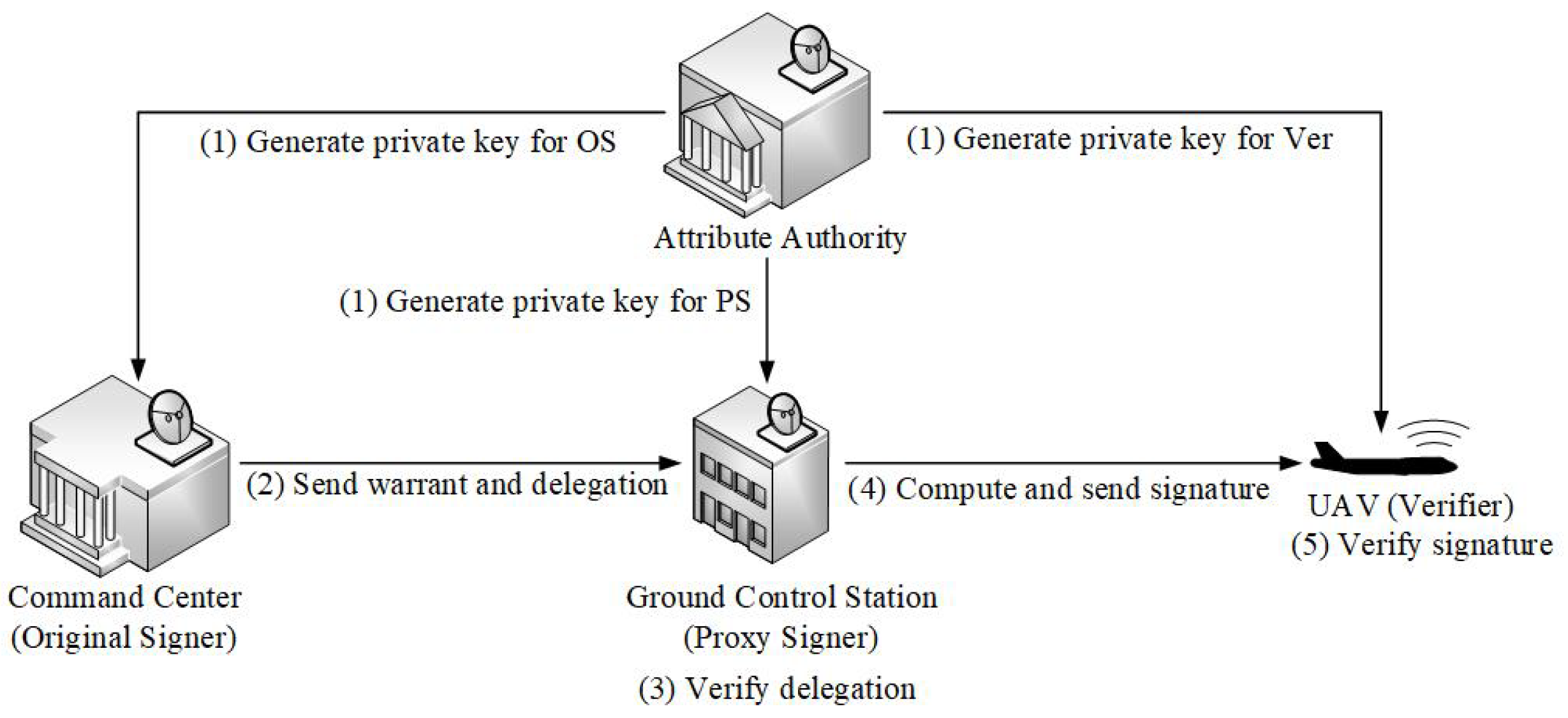
5.1. Overview of a t-ABPS Scheme
5.2. t-ABPS Scheme
5.2.1. Setup
- (i)
- It randomly selects the generator , , and .
- (ii)
- It computes and .
- (iii)
- It outputs the public parameters and sets as the master key.
5.2.2. Extract
- (i)
- It randomly selects .
- (ii)
- It computes the private key for command center as for every .
- (i)
- It randomly selects .
- (ii)
- It computes the private key for the ground control station as for every .
- (i)
- It randomly selects .
- (ii)
- It computes the private key for UAV as for every .
5.2.3. Delegation Generate
- (i)
- It randomly generates for .
- (ii)
- It generates the warrant w for the proxy signer.
- (iii)
- It computes the delegation as , , , where .
- (iv)
- It sends to the ground control station.
5.2.4. Delegation Verify
- (i)
- It chooses a set , where and .
- (ii)
- It verifies the delegation by checking if the equation holds.
5.2.5. Sign
- (i)
- It randomly generates for .
- (ii)
- It computes the signature as , , , where .
- (iii)
- It sends to the UAV.
5.2.6. Verify
- (i)
- It chooses a set , where and .
- (ii)
- It verifies the signature by checking if the equation holds.
- (iii)
- It outputs a boolean value if the equation holds. Otherwise, it outputs a boolean value .
6. t-ABPS Scheme Analysis
6.1. Correctness
6.2. Security Analysis
6.3. Efficiency Analysis
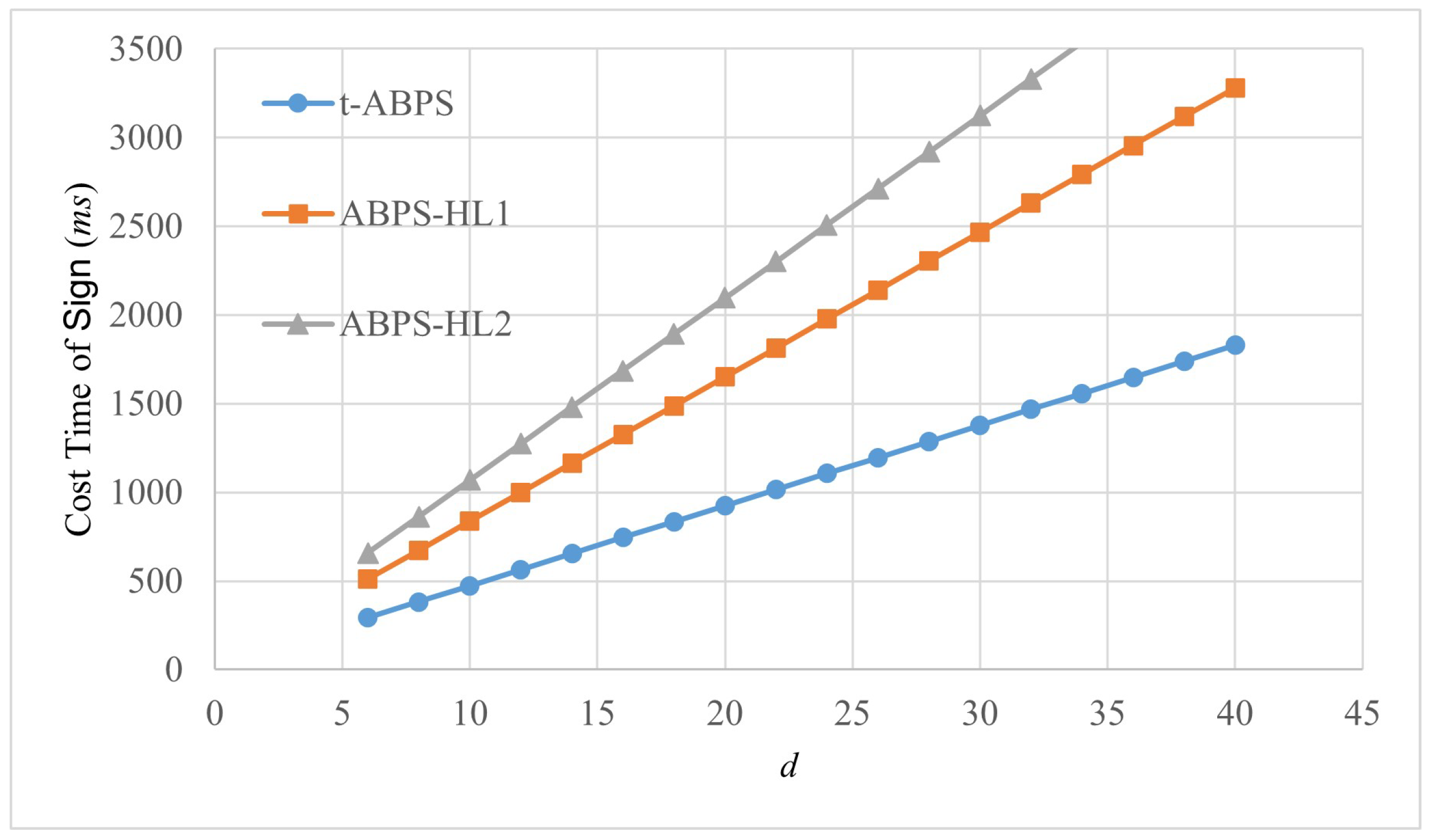
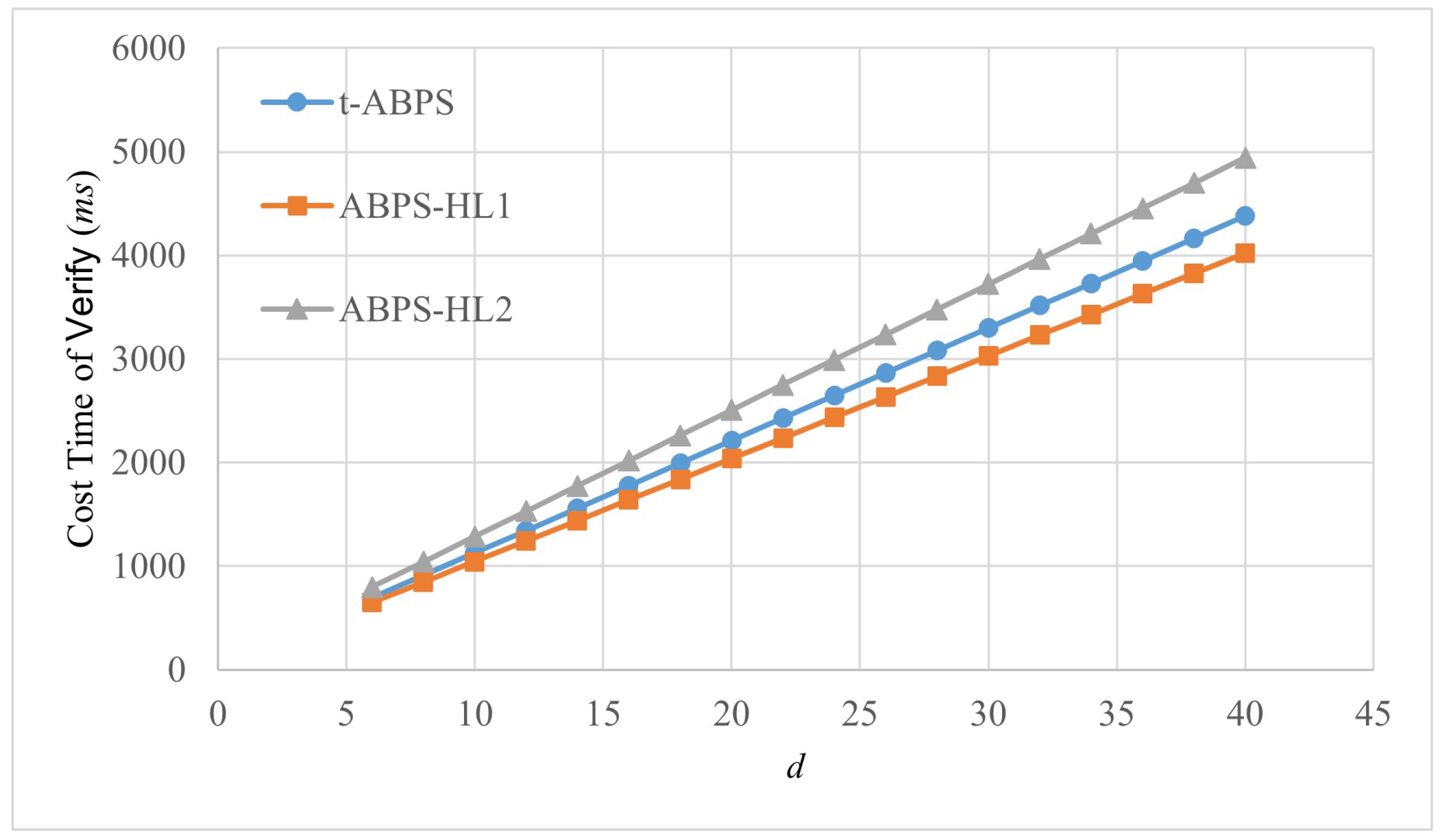
6.3.1. Computational Costs
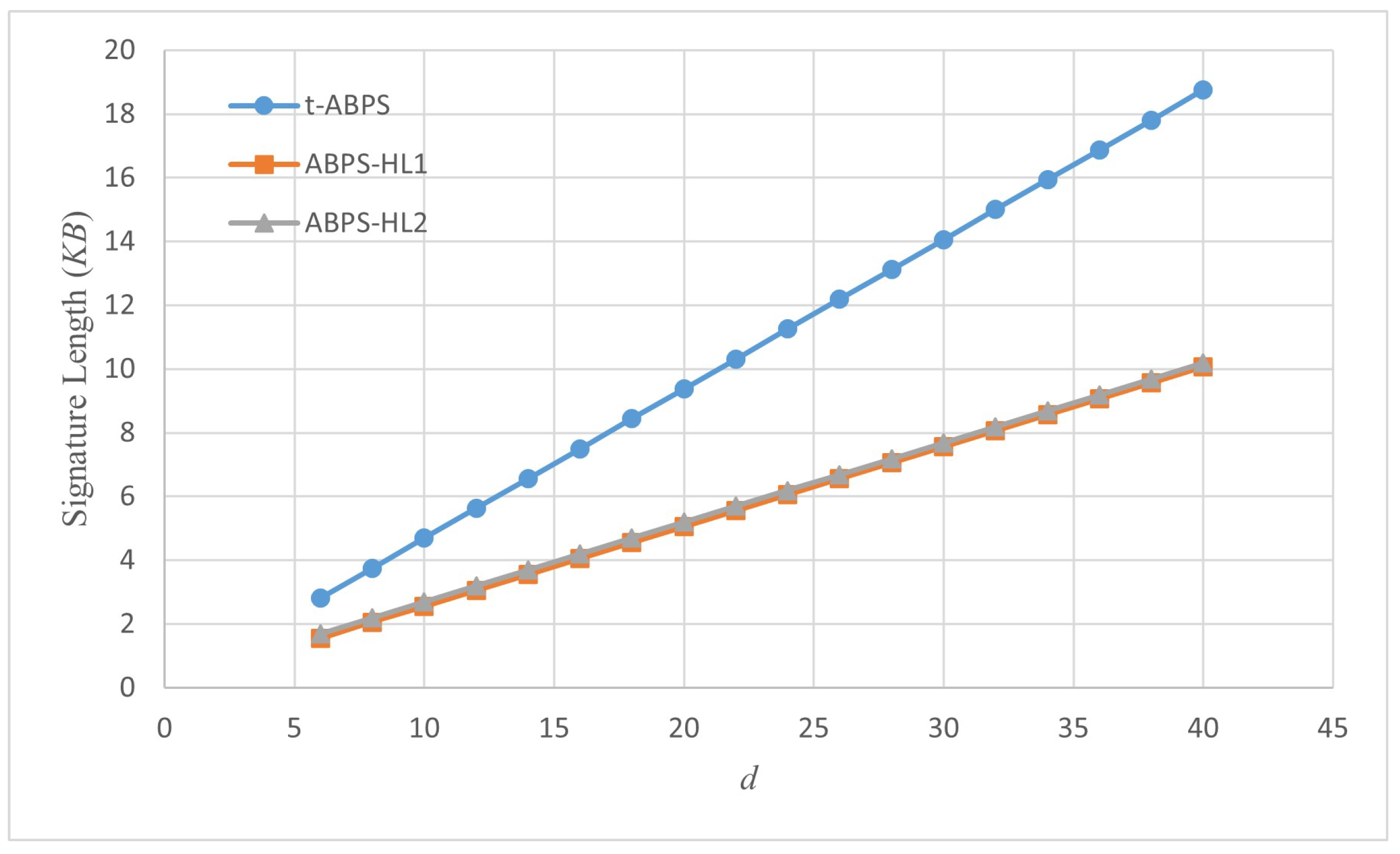
6.3.2. Communication Costs
6.3.3. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Guo, J.; Gao, H.; Liu, Z.; Huang, F.; Zhang, J.; Li, X.; Ma, J. ICRA: An intelligent clustering routing approach for UAV ad hoc networks. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2447–2460. [Google Scholar] [CrossRef]
- Zhi, Y.; Fu, Z.; Sun, X.; Yu, J. Security and privacy issues of UAV: A survey. Mob. Netw. Appl. 2020, 25, 95–101. [Google Scholar] [CrossRef]
- Samanth, S.; Prema, K.V.; Balachandra, M. Security in Internet of drones: A comprehensive review. Cogent Eng. 2022, 9, 2029080. [Google Scholar] [CrossRef]
- Khan, M.A.; Ullah, I.; Nisar, S.; Noor, F.; Qureshi, I.M.; Khanzada, F.; Khattak, H.; Aziz, M.A. Multiaccess edge computing empowered flying ad hoc networks with secure deployment using identity-based generalized signcryption. Mob. Inf. Syst. 2020, 2020, 8861947. [Google Scholar] [CrossRef]
- Din, N.; Waheed, A.; Zareei, M.; Alanazi, F. An improved identity-based generalized signcryption scheme for secure multi-access edge computing empowered flying ad hoc networks. IEEE Access 2021, 9, 120704–120714. [Google Scholar] [CrossRef]
- Wang, H.; Li, J.; Lai, C.; Wang, Z. A provably secure aggregate authentication scheme for unmanned aerial vehicle cluster networks. Peer-Peer Netw. Appl. 2020, 13, 53–63. [Google Scholar]
- Jan, S.U.; Khan, H.U. Identity and aggregate signature-based authentication protocol for IoD deployment military drone. IEEE Access 2021, 9, 130247–130263. [Google Scholar] [CrossRef]
- He, L.; Ma, J.; Shen, L.; Wei, D. Certificateless designated verifier proxy signature scheme for unmanned aerial vehicle networks. Sci. China Inf. Sci. 2021, 64, 1–15. [Google Scholar] [CrossRef]
- Xu, Z.; Luo, M.; Vijayakumar, P.; Peng, C.; Wang, L. Efficient certificateless designated verifier proxy signature scheme using UAV network for sustainable smart city. Sustain. Cities Soc. 2022, 80, 103771. [Google Scholar] [CrossRef]
- Abdel-Malek, M.A.; Akkaya, K.; Bhuyan, A.; Ibrahim, A.S. A proxy signature-based swarm drone authentication with leader selection in 5G networks. IEEE Access 2022, 10, 57485–57498. [Google Scholar] [CrossRef]
- Qu, Y.; Zeng, J. Certificateless proxy signcryption in the standard model for a UAV network. IEEE Internet Things J. 2022, 9, 15116–15127. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, J.; Huang, F.; Cai, D.; Wu, Y.; Chen, X.; Igorevich, K.K. Lightweight trustworthy message exchange in unmanned aerial vehicle networks. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2144–2157. [Google Scholar] [CrossRef]
- Maji, H.K.; Prabhakaran, M.; Rosulek, M. Attribute-based signatures. In Proceedings of the Cryptographers’ Track at the RSA Conference 2011, San Francisco, CA, USA, 14–18 February 2011. [Google Scholar]
- Su, Q.; Zhang, R.; Xue, R.; Li, P. Revocable attribute-based signature for blockchain-based healthcare system. IEEE Access 2020, 8, 127884–127896. [Google Scholar] [CrossRef]
- Zhang, Z.; Huang, W.; Cai, S.; Yang, L.; Liao, Y.; Zhou, S. An efficient reusable attribute-based signature scheme for mobile services with multi access policies in fog computing. Comput. Commun. 2022, 196, 9–22. [Google Scholar] [CrossRef]
- Blazy, O.; Brouilhet, L.; Conchon, E.; Klingler, M. Anonymous attribute-based designated verifier signature. J. Ambient. Intell. Humaniz. Comput. 2023, 14, 1–11. [Google Scholar] [CrossRef]
- Liu, L.; Hsu, C.; Au, M.H.; Harn, L.; Cui, J.; Zhao, Z. A revocable and comparable attribute-based signature scheme from lattices for IoMT. J. Syst. Archit. 2024, 154, 103222. [Google Scholar] [CrossRef]
- Li, J.; Au, M.H.; Susilo, W.; Xie, D.; Ren, K. Attribute-based signature and its applications. In Proceedings of the 5th ACM Symposium on Information, Computer and Communications Security, Beijing, China, 13–16 April 2010. [Google Scholar]
- Li, Y.; Chen, X.; Yin, Y.; Wan, J.; Zhang, J.; Kuang, L.; Dong, Z. SDABS: A flexible and efficient multi-authority hybrid attribute-based signature scheme in edge environment. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1892–1906. [Google Scholar] [CrossRef]
- Su, Q.; Zhang, R.; Xue, R.; Sun, Y.; Gao, S. Distributed attribute-based signature with attribute dynamic update for smart grid. IEEE Trans. Ind. Inform. 2022, 19, 9424–9435. [Google Scholar] [CrossRef]
- Chen, X.; Li, J.; Huang, X.; Li, J.; Xiang, Y.; Wong, D.S. Secure outsourced attribute-based signatures. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 3285–3294. [Google Scholar] [CrossRef]
- Tao, Q.; Cui, X.; Iftekhar, A. A novel lightweight decentralized attribute-based signature scheme for social co-governance. Inf. Sci. 2024, 654, 119839. [Google Scholar] [CrossRef]
- Xiong, H.; Bao, Y.; Nie, X.; Asoor, Y.I. Server-aided attribute-based signature supporting expressive access structures for industrial Internet of things. IEEE Trans. Ind. Inform. 2020, 16, 1013–1023. [Google Scholar] [CrossRef]
- Huang, Z.; Lin, Z. Secure server-aided attribute-based signature with perfect anonymity for cloud-assisted systems. J. Inf. Secur. Appl. 2022, 65, 103066. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y.; Han, J.; Liu, C.; Zhang, Y.; Wang, H. Decentralized attribute-based server-aid signature in the internet of things. IEEE Internet Things J. 2021, 9, 4573–4583. [Google Scholar] [CrossRef]
- Liu, X.; Ma, J.; Xiong, J.; Zhang, T.; Li, Q. Personal health records integrity verification using attribute based proxy signature in cloud computing. In Proceedings of the 6th International Conference on Internet and Distributed Computing Systems, Hangzhou, China, 28–30 October 2013. [Google Scholar]
- He, L.; Ma, J.; Wei, D. Attribute-based proxy signature scheme for unmanned aerial vehicle networks. J. Commun. 2021, 42, 87–96. [Google Scholar]
- He, L.; Gan, Y.; Zhang, Y. Attribute-based proxy signature scheme supporting flexible threshold predicate for UAV networks. Electronics 2023, 12, 4854. [Google Scholar] [CrossRef]
- Huang, X.; Susilo, W.; Mu, Y.; Wu, W. Proxy signature without random oracles. In Proceedings of the Second International Conference on Mobile Ad-hoc and Sensor Networks, Hong Kong, China, 13–15 December 2006. [Google Scholar]
- Caro, A.D.; Iovino, V. jPBC: Java pairing based cryptography. In Proceedings of the 2011 IEEE Symposium on Computers and Communications, Kerkyra, Greece, 28 June–1 July 2011. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Security Solutions | Integrity | Authentication | Protection of Signer’s Identity |
|---|---|---|---|
| Din et al. [6] | √ | √ | × |
| Xu et al. [10] | √ | √ | × |
| Qu et al. [12] | √ | √ | × |
| Notations | Description |
|---|---|
| public parameters | |
| master secret key | |
| , , | attribute sets of OS, PS, and Ver, respectively |
| , | private keys of OS, PS, respectively |
| , | public keys of OS, PS, respectively |
| w | warrant generated by OS |
| delegation computed by OS | |
| m | message |
| signature computed by PS |
| Oracles | Inputs | Outputs |
|---|---|---|
| the corresponding private key | ||
| w, | ||
| w, , m |
| Signature Schemes | Exponential Operation | Hash Operation | Pairing Operation |
|---|---|---|---|
| t-ABPS | 3n | 1 | 0 |
| ABPS-HL1 | 6d | d + 1 | 0 |
| ABPS-HL2 | 2n + 4d − 2k + 2 | n + d − k + 1 | 0 |
| Signature Schemes | Exponential Operation | Hash Operation | Pairing Operation |
|---|---|---|---|
| t-ABPS | 2d | 2d + 2 | 5d |
| ABPS-HL1 | 2d | 2d + 2 | 4d + 1 |
| ABPS-HL2 | 0 | 2(n + d − k + 1) | 2(n + d − k) + 3 |
| Signature Schemes | Signature Length |
|---|---|
| t-ABPS | |
| ABPS-HL1 | |
| ABPS-HL2 |
| Signature Schemes | Unforgeability | Identity Privacy of OS | Identity Privacy of PS | Security Model |
|---|---|---|---|---|
| t-ABPS | √ | √ | √ | ROM |
| ABPS-HL1 | √ | √ | √ | ROM |
| ABPS-HL2 | √ | √ | √ | ROM |
| Signature Schemes | Overall Computational Costs | Communication Costs | Use Default Attribute Set |
|---|---|---|---|
| t-ABPS | lower | higher | No |
| ABPS-HL1 | medium | lower | Yes |
| ABPS-HL2 | higher | lower | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, L.; Gan, Y.; Yin, Y. Efficient Threshold Attribute-Based Signature Scheme for Unmanned Aerial Vehicle (UAV) Networks. Electronics 2025, 14, 339. https://doi.org/10.3390/electronics14020339
He L, Gan Y, Yin Y. Efficient Threshold Attribute-Based Signature Scheme for Unmanned Aerial Vehicle (UAV) Networks. Electronics. 2025; 14(2):339. https://doi.org/10.3390/electronics14020339
Chicago/Turabian StyleHe, Lei, Yong Gan, and Yifeng Yin. 2025. "Efficient Threshold Attribute-Based Signature Scheme for Unmanned Aerial Vehicle (UAV) Networks" Electronics 14, no. 2: 339. https://doi.org/10.3390/electronics14020339
APA StyleHe, L., Gan, Y., & Yin, Y. (2025). Efficient Threshold Attribute-Based Signature Scheme for Unmanned Aerial Vehicle (UAV) Networks. Electronics, 14(2), 339. https://doi.org/10.3390/electronics14020339