
A Study on Reducing the Noise Using the Kalman Filter in Digital Holographic Microscopy (DHM)


Abstract
1. Introduction
2. Theory
2.1. Digital Holographic Microscopy (DHM)
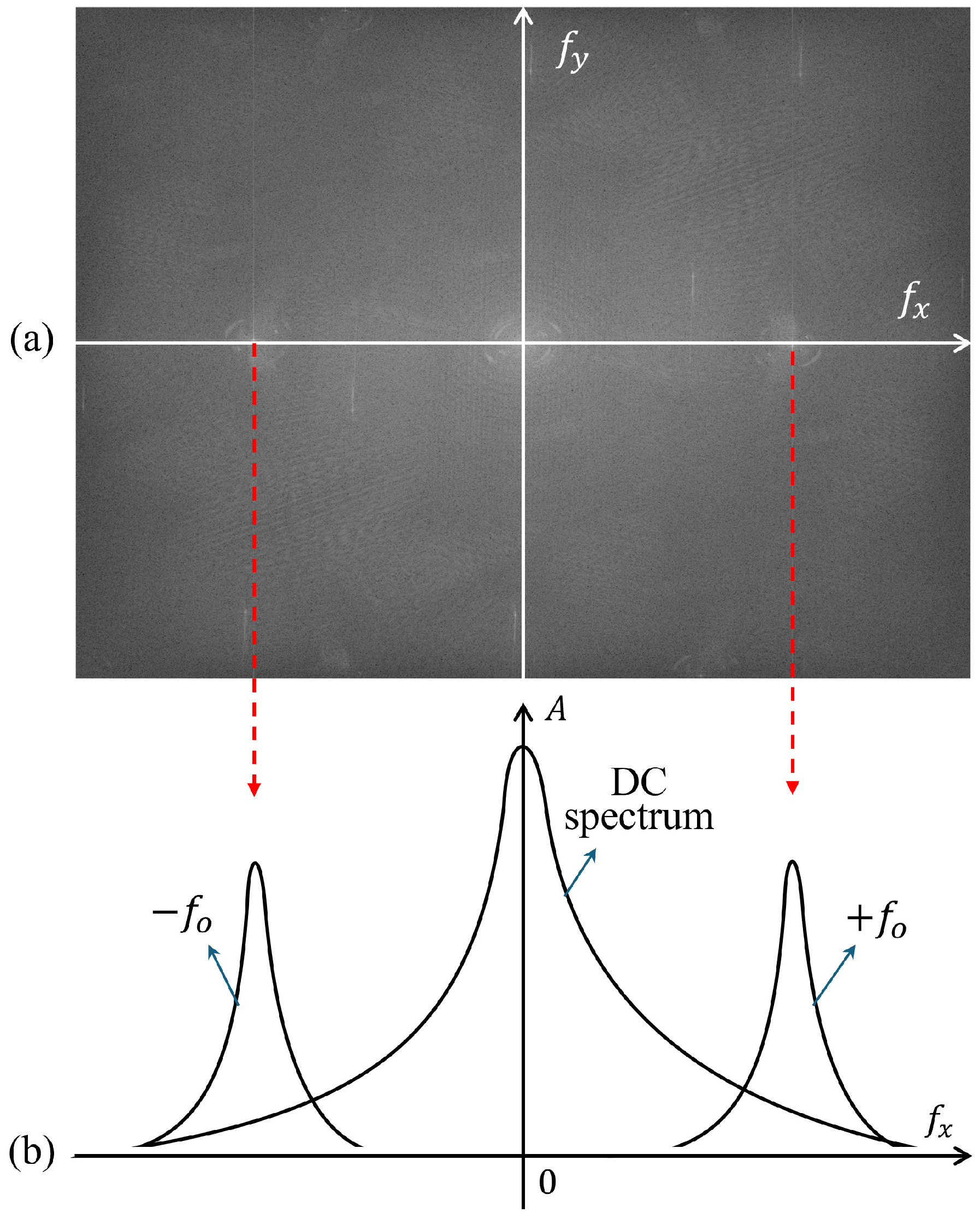
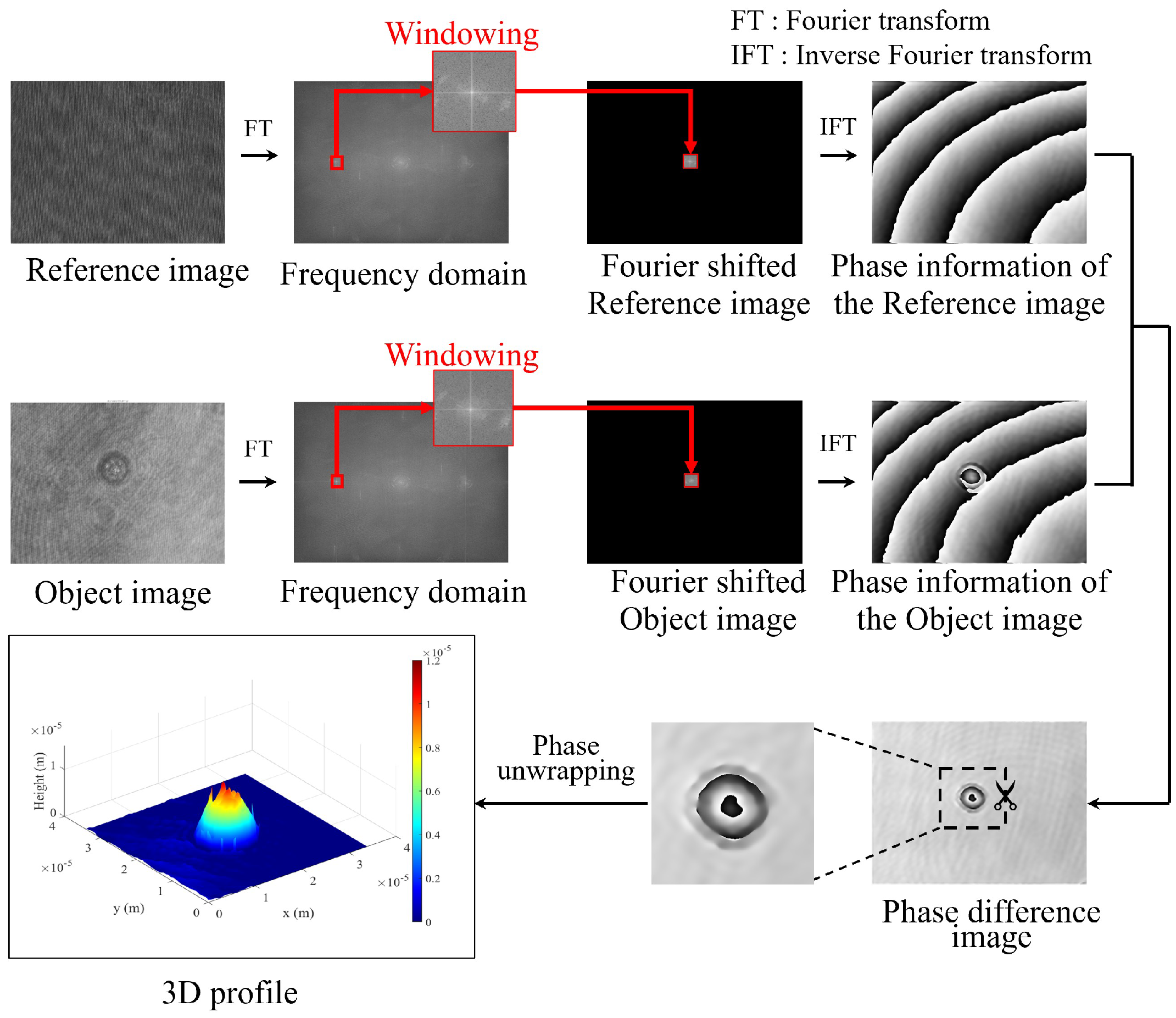
2.2. Image Processing for DHM
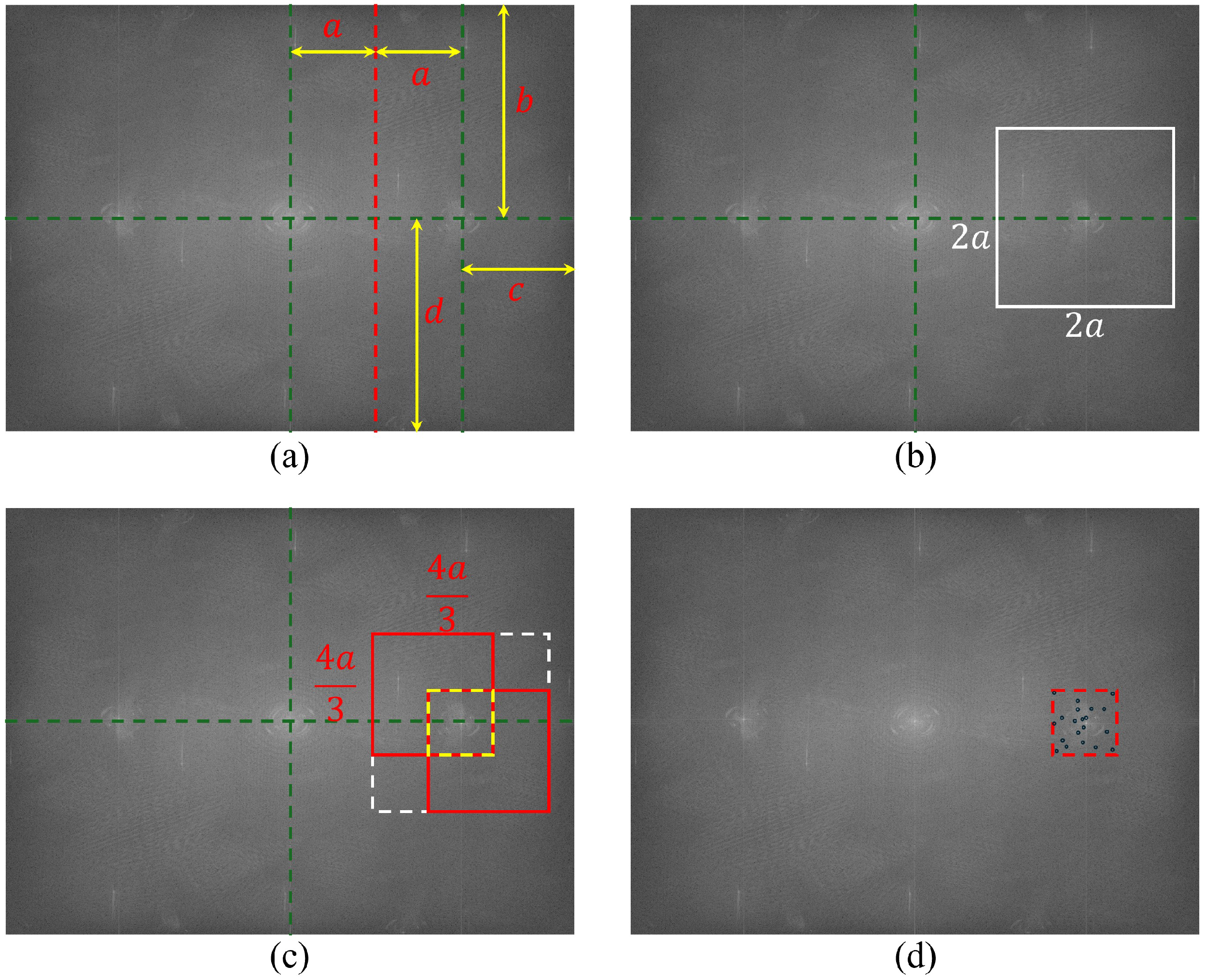
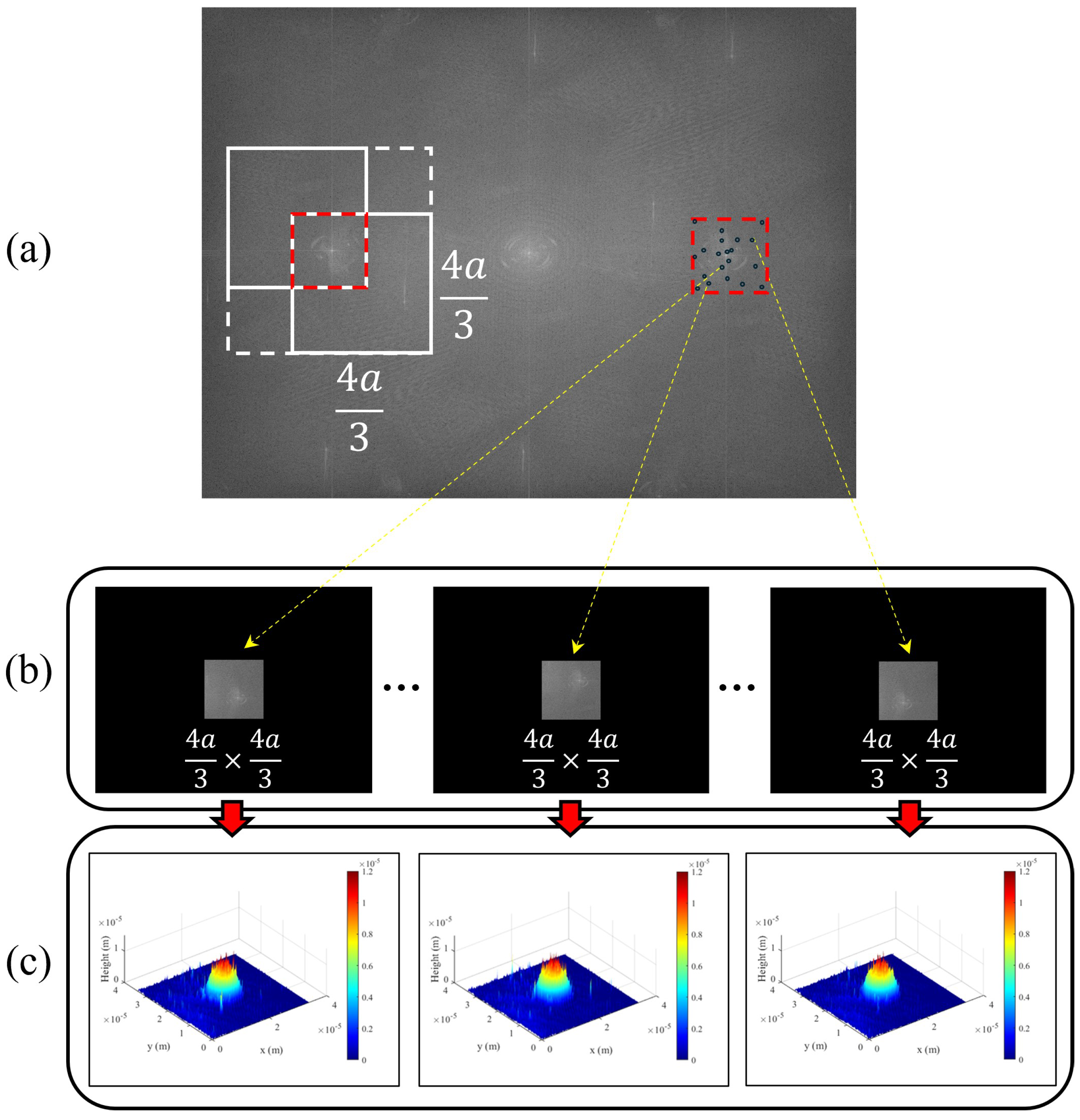
2.3. A Method for Determination of WS Size in DHM
2.4. A Method for Noise Reduction Using the Kalman Filter in DHM
3. Experimental Setup and Results
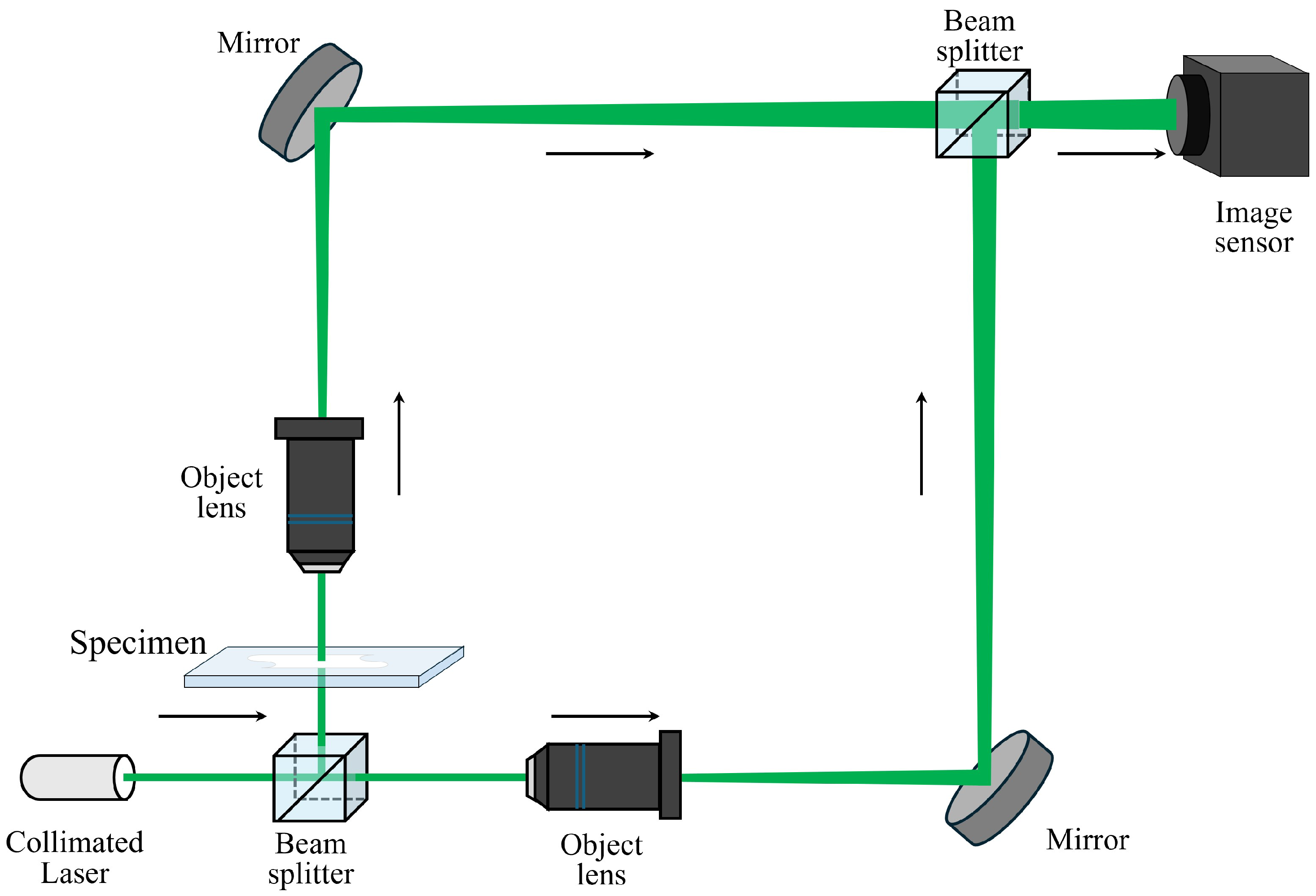
3.1. Experimental Setup
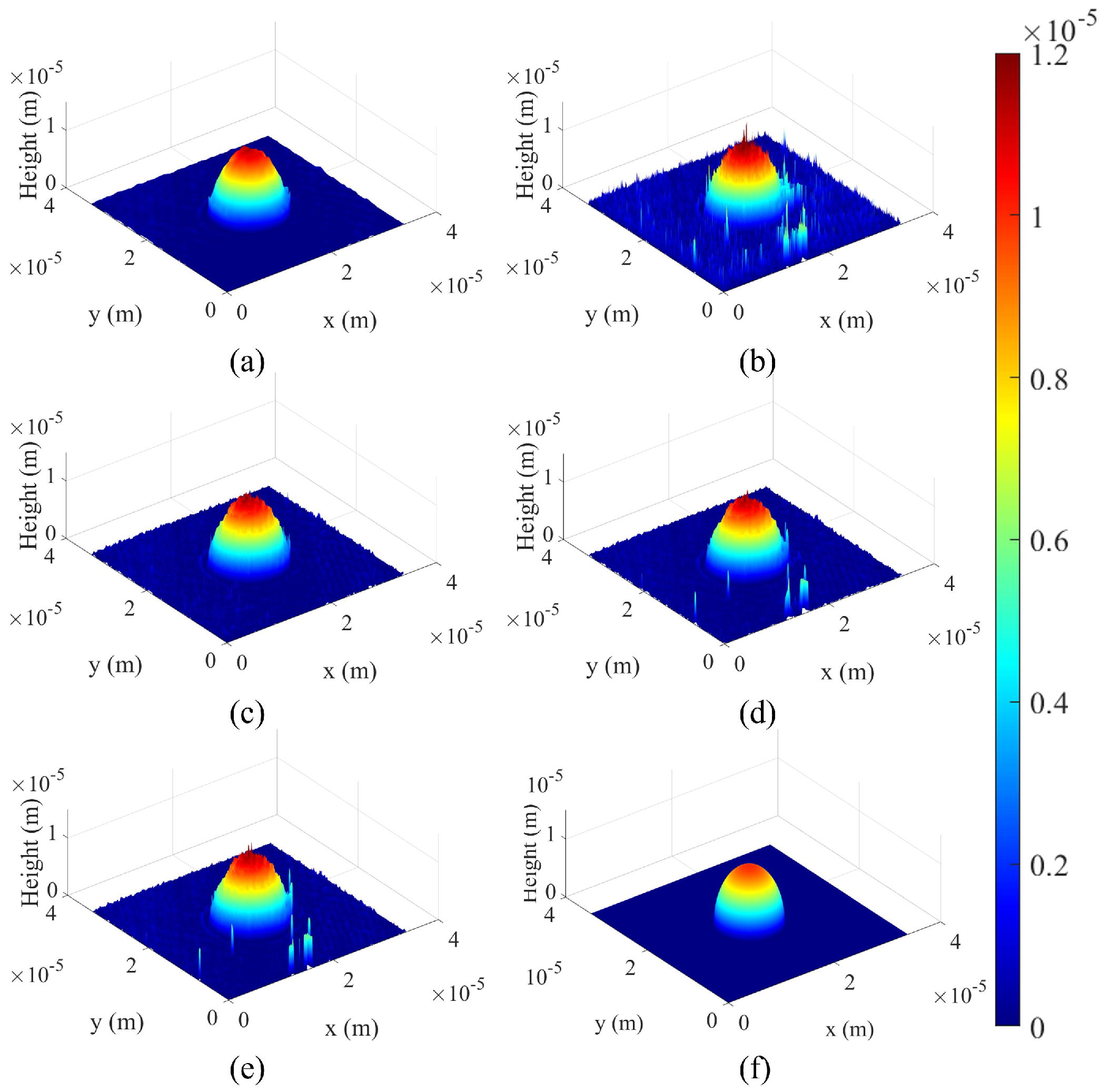
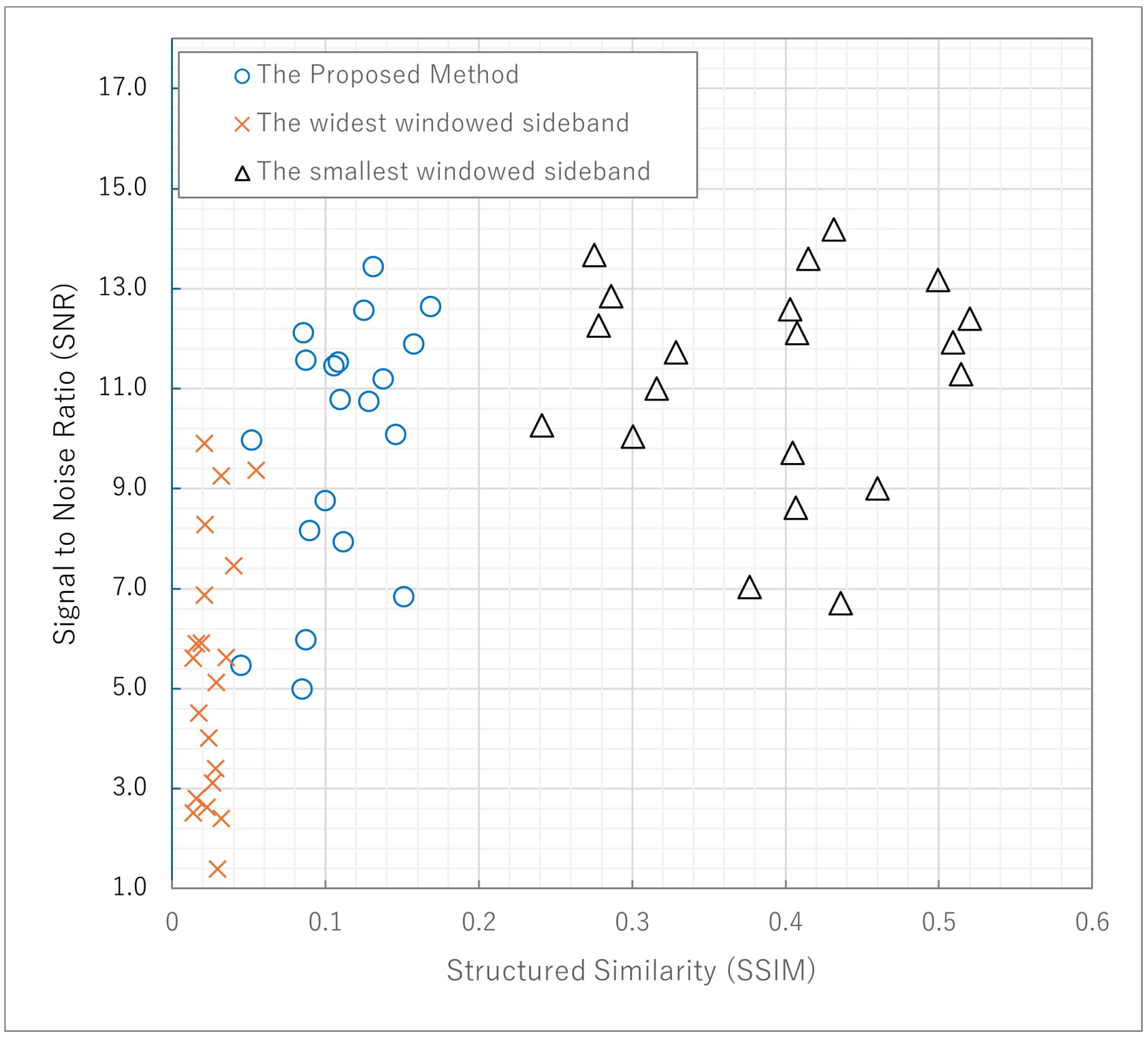
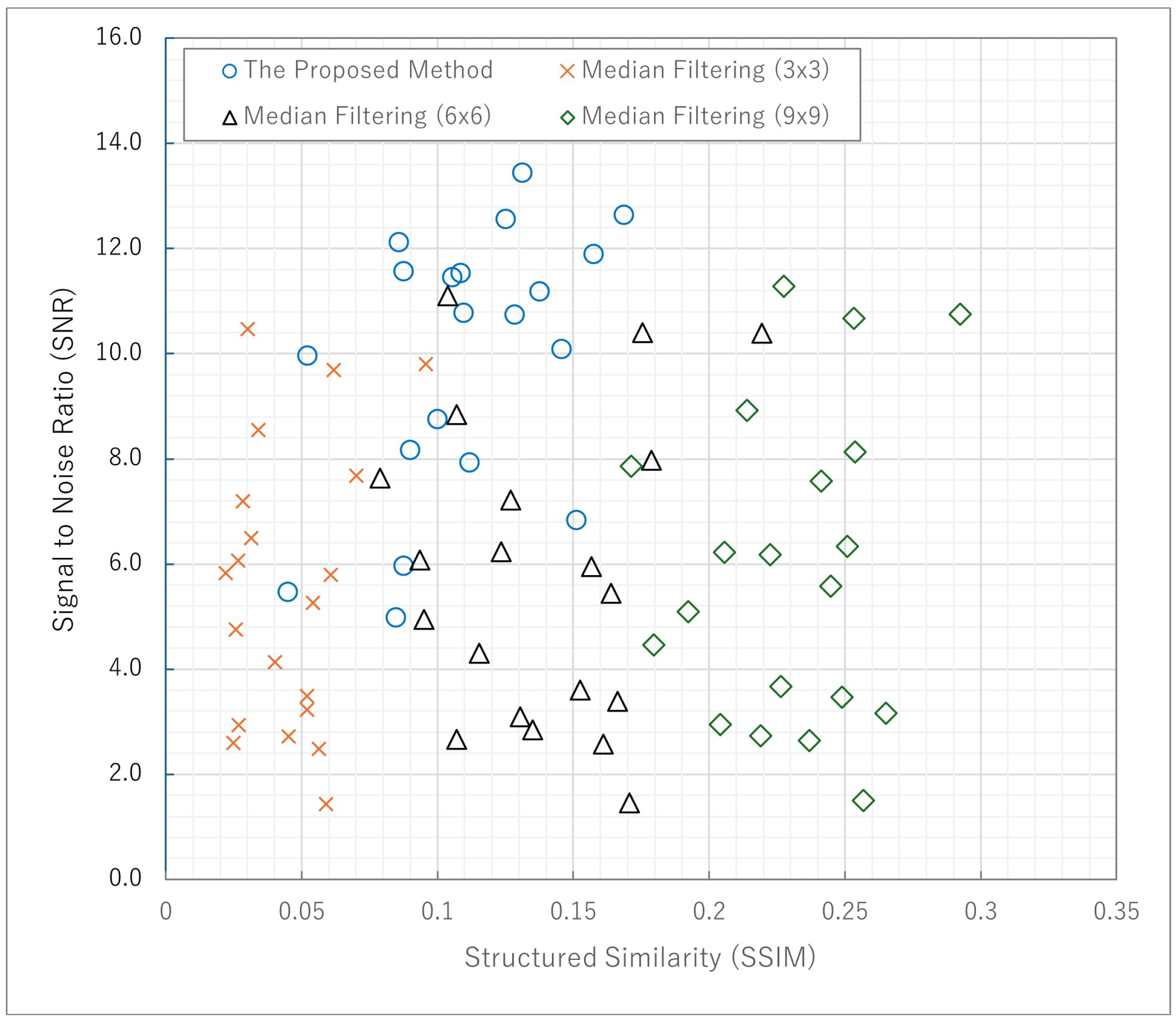
3.2. Experimental Result
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 2D | Two-dimensional |
| 3D | Three-dimensional |
| DC | Direct current |
| DHM | Digital holographic microscopy |
| RBC | Red blood cell |
| SNR | Signal-to-noise ratio |
| SSIM | Structured similarity |
| WS | Windowed sideband |
References
- Nguyen, T.M.; Kim, N.; Kim, D.H.; Le, H.L.; Piran, M.J.; Um, S.J.; Kim, J.H. Deep learning for human disease detection, subtype classification, and treatment response prediction using epigenomic data. Biomedicines 2021, 9, 1733. [Google Scholar] [CrossRef] [PubMed]
- Mishra, S.; Dash, A.; Jena, L. Use of deep learning for disease detection and diagnosis. In Bio-Inspired Neurocomputing; Springer: New York, NY, USA, 2021; pp. 181–201. [Google Scholar]
- Yousaf, F.; Iqbal, S.; Fatima, N.; Kousar, T.; Rahim, M.S.M. Multi-class disease detection using deep learning and human brain medical imaging. Biomed. Signal Process. Control 2023, 85, 104875. [Google Scholar] [CrossRef]
- Tchagna Kouanou, A.; Mih Attia, T.; Feudjio, C.; Djeumo, A.F.; Ngo Mouelas, A.; Nzogang, M.P.; Tchito Tchapga, C.; Tchiotsop, D. An overview of supervised machine learning methods and data analysis for COVID-19 detection. J. Healthc. Eng. 2021, 2021, 4733167. [Google Scholar] [CrossRef]
- Zoabi, Y.; Deri-Rozov, S.; Shomron, N. Machine learning-based prediction of COVID-19 diagnosis based on symptoms. NPJ Digit. Med. 2021, 4, 1–5. [Google Scholar] [CrossRef]
- Rehman, A.; Iqbal, M.A.; Xing, H.; Ahmed, I. COVID-19 detection empowered with machine learning and deep learningtechniques: A systematic review. Appl. Sci. 2021, 11, 3414. [Google Scholar] [CrossRef]
- Subramanian, N.; Elharrouss, O.; Al-Maadeed, S.; Chowdhury, M. A review of deep learning-based detec-tion methods for COVID-19. Comput. Biol. Med. 2022, 143, 105233. [Google Scholar] [CrossRef]
- O’Connor, T.; Shen, J.B.; Liang, B.T.; Javidi, B. Digital holographic deep learning of red blood cells for field-portable, rapid COVID-19 screening. Opt. Lett. 2021, 46, 2344–2347. [Google Scholar] [CrossRef]
- O’Connor, T.; Santaniello, S.; Javidi, B. COVID-19 detection from red blood cells using highly comparative time-series analysis (HCTSA) in digital holographic microscopy. Opt. Express 2022, 30, 1723–1736. [Google Scholar] [CrossRef]
- O’Connor, T.; Javidi, B. COVID-19 screening with digital holographic microscopy using intra-patient probability functions of spatio-temporal bio-optical attributes. Opt. Express 2022, 13, 5377–5389. [Google Scholar] [CrossRef]
- El-Schich, Z.; Leida Mölder, A.; Gjörloff Wingren, A. Quantitative phase imaging for label-free analysis of cancer cells—Focus on digital holographic microscopy. Appl. Sci. 2018, 8, 1027. [Google Scholar] [CrossRef]
- Anand, A.; Chhaniwal, V.K.; Patel, N.R.; Javidi, B. Automatic identification of malaria-infected RBC with digital holographic microscopy using correlation algorithms. IEEE Photonics J. 2012, 4, 1456–1464. [Google Scholar] [CrossRef]
- Javidi, B.; Markman, A.; Rawat, S.; O’Connor, T.; Anand, A.; Andemariam, B. Sickle cell disease diagnosis based on spatiotemporalcell dynamics analysis using 3D printed shearing digital holographic microscopy. Opt. Express 2018, 26, 13614–13627. [Google Scholar] [CrossRef]
- Gabor, D. A new microscopic principle. Nature 1948, 161, 777–778. [Google Scholar] [CrossRef]
- Goodman, J.W. Digital image formation from electronically detected holograms. In Proceedings of the SPIE 0010, Computerized Imaging Techniques, Washington, DC, USA, 1 July 1967. [Google Scholar]
- Kim, Y.; Park, S.; Baek, H.; Min, S.W. Voxel characteristic estimation of integral imaging display system using self-interference incoherent digital holography. Opt. Express 2022, 30, 902–913. [Google Scholar] [CrossRef]
- Ahar, A.; Birnbaum, T.; Chlipala, M.; Zaperty, W.; Mahmoudpour, S.; Kozacki, T.; Kujawinska, M.; Schelkens, P. Comprehensive performance analysis of objective quality metrics for digital holography. Signal Process. Image Commun. 2021, 97, 116361. [Google Scholar] [CrossRef]
- Shevkunov, I.; Katkovnik, V.; Claus, D.; Pedrini, G.; Petrov, N.V.; Egiazarian, K. Spectral object recognition in hyperspectral holography with complex-domain denoising. Sensors 2019, 19, 5188. [Google Scholar] [CrossRef] [PubMed]
- Bordbar, B.; Zhou, H.; Banerjee, P.P. 3D object recognition through processing of 2D holograms. Appl. Opt. 2019, 58, G197–G203. [Google Scholar] [CrossRef]
- Lokesh Reddy, B.; Nelleri, A. Single-Pixel Compressive Digital Holographic Encryption System Based on Circular Harmonic Key and Parallel Phase Shifting Digital Holography. Int. J. Opt. 2022, 2022, 6298010. [Google Scholar] [CrossRef]
- Girija, R.; Singh, H.; Abirami, G. Optical medical image encryption based on digital hologram in various domains. J. Opt. 2024, 53, 458–467. [Google Scholar] [CrossRef]
- Reddy, B.L.; Ramachandran, P.; Nelleri, A. Optimal Fresnelet sparsification for compressive complex wave retrieval from an off-axis digital Fresnel hologram. Opt. Eng. 2021, 60, 073102. [Google Scholar] [CrossRef]
- Yoshikawa, N.; Miyake, T. Omnidirectional 3D shape measurement using image outlines reconstructed from gabor digital holography. Opt. Commun. 2023, 529, 129080. [Google Scholar] [CrossRef]
- Butola, A.; Kanade, S.R.; Bhatt, S.; Dubey, V.K.; Kumar, A.; Ahmad, A.; Prasad, D.K.; Senthilkumaran, P.; Ahluwalia, B.S.; Mehta, D.S. High space-bandwidth in quantitative phase imaging using partially spatially coherent digital holographic microscopy and a deep neural network. Opt. Express 2020, 28, 36229–36244. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.W.; Lee, J.; Anand, A.; Cho, M.; Lee, M.C. Phase Differences Averaging (PDA) Method for Reducing the Phase Error in Digital Holographic Microscopy (DHM). J. Korea Inst. Inf. Commun. Eng. 2023, 21, 90–97. [Google Scholar] [CrossRef]
- Javidi, B.; Carnicer, A.; Anand, A.; Barbastathis, G.; Chen, W.; Ferraro, P.; Goodman, J.W.; Horisaki, R.; Khare, K.; Kujawinska, M.; et al. Roadmap on digital holography. Opt. Express 2023, 29, 35078–35118. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.W.; Cho, M.; Lee, M.C. Noise reduction method using a variance map of the phase differences in digital holographic microscopy. ETRI J. 2022, 45, 131–137. [Google Scholar] [CrossRef]
- Kim, H.W.; Cho, M.; Lee, M.C. Noise Filtering Method of Digital Holographic Microscopy for Obtaining an Accurate Three-Dimensional Profile of Object Using aWindowed Sideband Array (WiSA). Sensors 2022, 22, 4844. [Google Scholar] [CrossRef] [PubMed]
- Shin, S.; Yu, Y. Fine metal mask 3-dimensional measurement by using scanning digital holographic microscope. J. Korean Phys. Soc 2018, 72, 863–867. [Google Scholar] [CrossRef]
- Li, J.; Li, B.; Zhang, X. Digital holographic microscopy measures underwater microorganism. In Proceedings of the SPIE 11427, Second Target Recognition and Artificial Intelligence Summit Forum, Changchun, China, 31 January 2020. [Google Scholar]
- Kim, H.W.; Cho, M.; Lee, M.C. Image Processing Techniques for Improving Quality of 3D Profile in Digital Holographic Microscopy Using Deep Learning Algorithm. Sensors 2024, 24, 1950. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Fluids Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Tang, H.; Tang, Y.; Su, Y.; Feng, W.; Wang, B.; Chen, P.; Zuo, D. Feature extraction of multi-sensors for early bearing fault diagnosis using deep learning based on minimum unscented kalman filter. Eng. Appl. Artif. Intell. 2024, 127, 107138. [Google Scholar] [CrossRef]
- Park, G. Optimal vehicle position estimation using adaptive unscented Kalman filter based on sensor fusion. Mechatronics 2024, 99, 103144. [Google Scholar] [CrossRef]
- Kim, H.W.; Cho, M.; Lee, M.C. A Novel Image Processing Method for Obtaining an Accurate Three-Dimensional Profile of Red Blood Cells in Digital Holographic Microscopy. Biomimetics 2023, 8, 563. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.W.; Cho, M.; Lee, M.C. Three-Di-mensional (3D) Visualization under Extremely Low Light Conditions Using Kalman Filter. Sensors 2023, 23, 7571. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Zebker, H.A.; Werner, C.L. Satellite radar interferometry: Two-dimensional phase unwrapping. Radio Sci. 1988, 23, 713–720. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 4th ed.; Pearson: New York, NY, USA, 2018. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
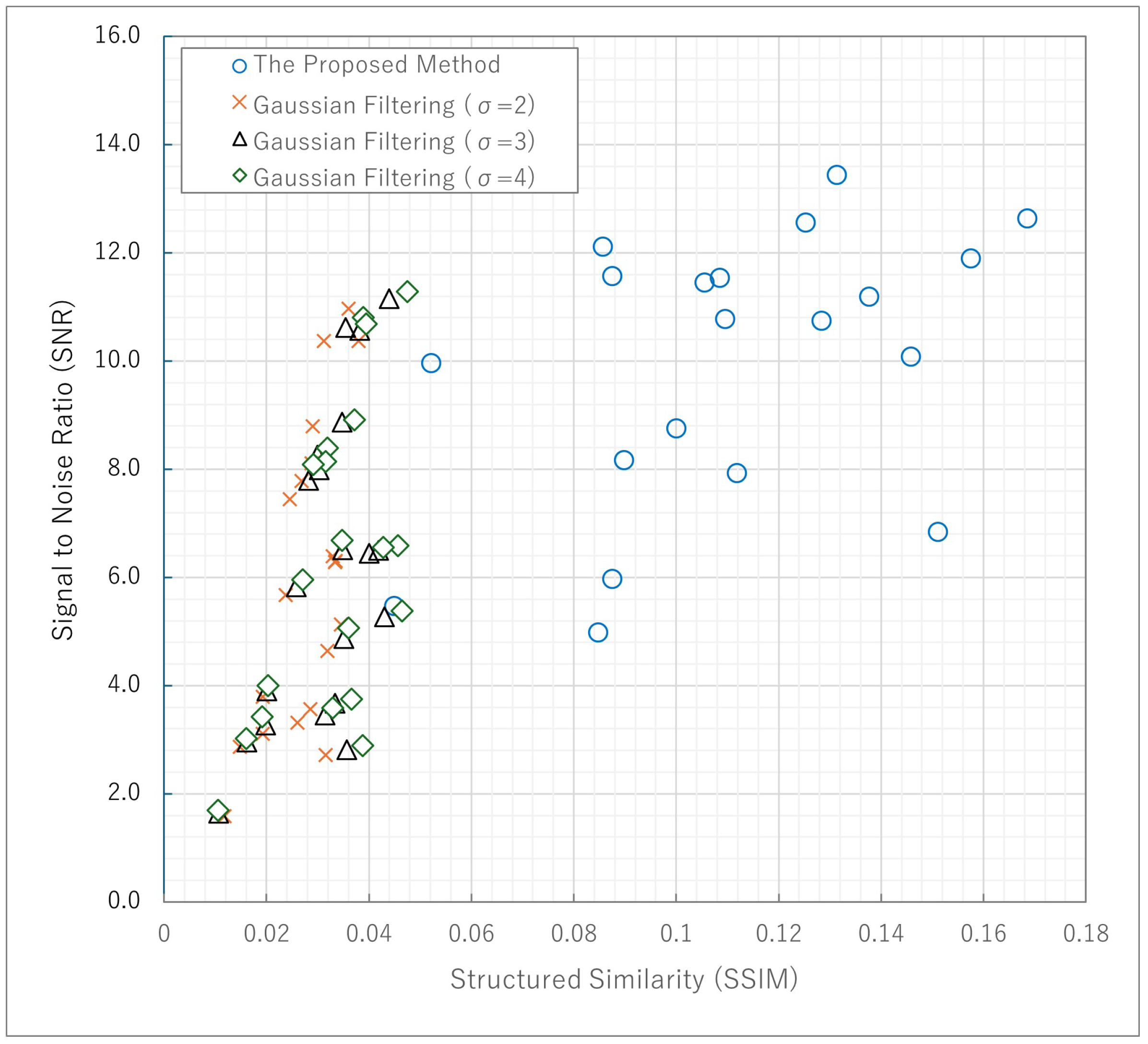
| SNR (dB) | SSIM | |
|---|---|---|
| Unfiltered | 9.907 | 0.02100 |
| Kalman filter | 11.57 | 0.08751 |
| Gaussian filter | 10.97 | 0.03598 |
| Median filter | 10.91 | 0.06733 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ono, T.; Kim, H.-W.; Cho, M.; Lee, M.-C. A Study on Reducing the Noise Using the Kalman Filter in Digital Holographic Microscopy (DHM). Electronics 2025, 14, 338. https://doi.org/10.3390/electronics14020338
Ono T, Kim H-W, Cho M, Lee M-C. A Study on Reducing the Noise Using the Kalman Filter in Digital Holographic Microscopy (DHM). Electronics. 2025; 14(2):338. https://doi.org/10.3390/electronics14020338
Chicago/Turabian StyleOno, Taishi, Hyun-Woo Kim, Myungjin Cho, and Min-Chul Lee. 2025. "A Study on Reducing the Noise Using the Kalman Filter in Digital Holographic Microscopy (DHM)" Electronics 14, no. 2: 338. https://doi.org/10.3390/electronics14020338
APA StyleOno, T., Kim, H.-W., Cho, M., & Lee, M.-C. (2025). A Study on Reducing the Noise Using the Kalman Filter in Digital Holographic Microscopy (DHM). Electronics, 14(2), 338. https://doi.org/10.3390/electronics14020338