1. Introduction
Permanent magnet synchronous motors (PMSMs) have been broadly used in electric vehicles and industrial applications due to their high power density, wide speed range, and low torque ripples [
1,
2,
3,
4]. Accurate vector control of PMSMs requires real-time rotor position and speed feedback for vector control. Typically, position sensors, such as encoders and resolvers, are installed in alignment with the machine shaft, but limitations are found in applications. First, position sensing signals are sensitive to electromagnetic interference and mechanical vibration, causing instability control during machine operation. Second, using position sensors increases system costs, particularly for high-speed machines in which high-resolution position sensors are needed for precise position measurement. Position sensorless control techniques for PMSMs have been researched to overcome the drawbacks.
According to the motor operation range, position sensorless control can be categorized into low-speed methods and high-speed methods [
5,
6,
7,
8]. Low-speed position estimation is achieved by the anisotropy of the PMSM, as the rotor magnetic saliency introduces a position-related current. As the stator voltage reduces at low speed due to the low back electromagnetic force (EMF), additional injection signals should be induced by the power converter to increase the voltage level of PMSM. High-frequency injection is widely used for low-speed position estimation, and the benefit is the large, induced current to increase the signal-to-noise ratio. According to the signal type, high-frequency injection can be divided into sinusoidal injection and square injection. The sinusoidal injection uses the sinusoidal voltage as the excited source and can be injected into either stationary axes or rotating axes [
5]. Rotor position can be estimated through high-frequency inductance calculation and a rotor observer. The major drawback of sinusoidal injection is the usage of various digital filters in position estimators and current control loops, degrading the control bandwidth. As an improvement, square-wave voltages can be used to induce high-frequency currents, and its injection frequency can reach the maximum half of the control frequency [
6,
7,
8]. The higher injection frequency brings the advantages of filter-less signal processing, thus obtaining a high-bandwidth sensorless motor drive. Although voltage-injection techniques are effective at zero and low speeds, their high-speed operation capability is limited. The primary reason is that high-speed PMSMs require more voltage utilized from DC-link, which remains limited voltage for additional injection. In addition, the injection causes additional torque ripples, efficiency reduction, and audible noises. In consequence, voltage injection is not suitable for high-speed sensorless control.
Model-based position estimation is available for high-speed position estimation, as the stator flux linkage of back EMF contains sufficient rotor position information. Stator flux linkage can be calculated via pure integration of stator voltage equations, and the rotor position can be estimated from a phase-locked loop (PLL) [
9]. However, pure integration is hard to implement in real-time microprocessors, as any DC offset in voltage or current measurements results in infinite flux linkage errors. Back EMF-based approaches are promising solutions for high-speed position estimation. It is essentially a time-derivative form of stator flux linkage, thereby avoiding DC-offset issues. As the back EMF increases approximately linearly with the rotor speed, its estimation accuracy is guaranteed in all high-speed regions. A typical back EMF-based position estimation method is using position observers. A sliding-mode observer is proposed in [
10] to estimate the back EMF of the PMSMs, and the rotor position can be extracted from a sine–cosine position-related EMF. However, the sliding-mode observer causes additional ripples due to the discontinuous switching functions, and some improvements are put forward. Reference [
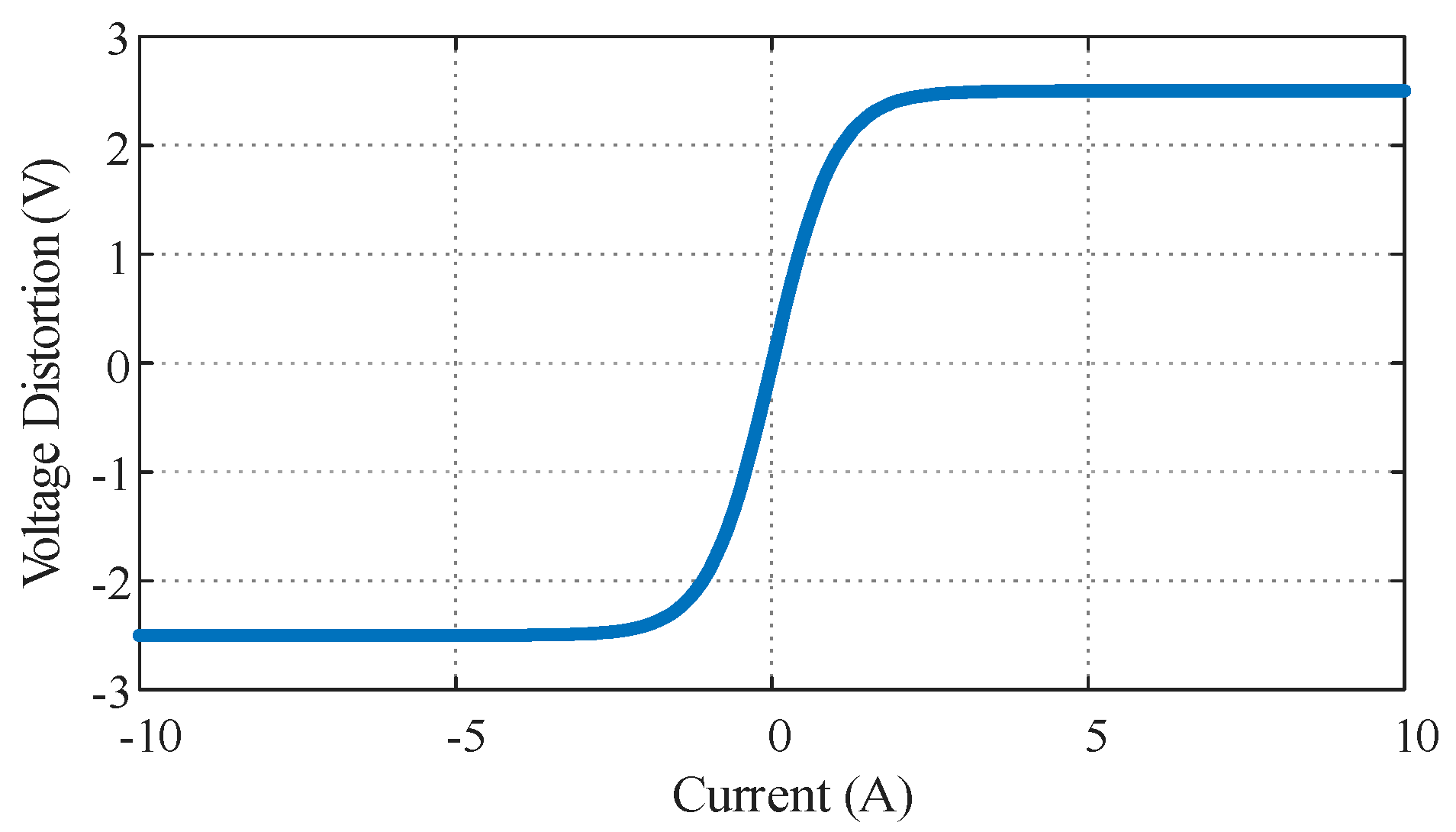
11] proposes an enhanced sliding mode controller that can reduce the switching oscillations. Experimental results show a higher position estimation accuracy compared to the conventional methods. In addition to basic position estimation, some research work analyzes harmonic issues in position estimation caused by inverter nonlinearity and sensor bias. Dominant odd harmonics can be observed in position estimation errors due to those non-ideal disturbances in PMSM drives [
12]. To eliminate the position error, adaptive filters are proposed with the capability to track the rotor frequency change and selective harmonic cancelation. Literature [
13,
14] proposes complex-coefficient filter-based position estimators, which can reduce the DC offset and other harmonics due to their bandpass capability. A filtering network is mentioned in [
15], which consists of multiple bandpass and bandstop filters, thereby eliminating multiple harmonics in one position observers. To sum up, the above high-speed position estimation techniques are based on a filtering technique or observer structure. Both of them require a long convergence process at several control periods since the position estimator works like a filter to reduce harmonics and noises.
Recently, some studies from the literature have reported that the rotor position can be calculated via numerical solutions instead of a filter or observer. It directly solves the rotor position and speed from the voltage equation and does not require a complicated filter transfer function design or observer stability. In [
16], the stator voltage in the stationary frame is used to design a cost function, and a Newton searching technique is adopted to find the solution (namely rotor position and speed) that minimizes the cost function. During the processing of searching, all numerical calculations can be completed within one control period, other than multiple control periods in the observer-based methods, which has great potential in faster position estimation. However, the Newton searching technique typically requires multiple searches within a control period, which requires a high-performance microcontroller to implement. The large computational burden improves the convergence speed but makes the method infeasible for many industrial motor drive applications. In [
17], researchers further simplify the Newton numerical process from two variables (position and speed) to one variable (speed), and the computation time can be saved compared to the previous numerical solution as the dimension reduces. However, Newton’s search still has complicated matrix calculation, and the heavy computational burden cannot be fully avoided.
In this paper, a new numerical position estimator is proposed using transmission line modeling (TLM) theory to simplify the numerical process. TLM is used in microwave transmission, and its numerical calculation and all the electric circuits can be regarded as limited lone line segments, a combination of active and pass electrical components [
18]. Compared to observer or filter-based position estimation methods, the TLM-based method does not require long convergence, which can improve the estimation accuracy. Also, it simplifies the numerical process as no complicated matrix calculation is needed. The paper is organized as follows: The fundamentals of 2-dimensional TLM theory are first introduced as it is used in PMSM drives for the first time. Then, the traditional position estimation method is analyzed, and its limitations are discussed. The proposed TLM-based position estimation design is given afterward, and finally, simulations of the proposed TLM-based position estimation are given considering various noisy and disturbed conditions. Results prove that the proposed TLM-based sensorless control can operate well with higher estimation accuracy in position estimation compared to other methods.
2. Fundamentals of 2-Dimensional (2D) TLM
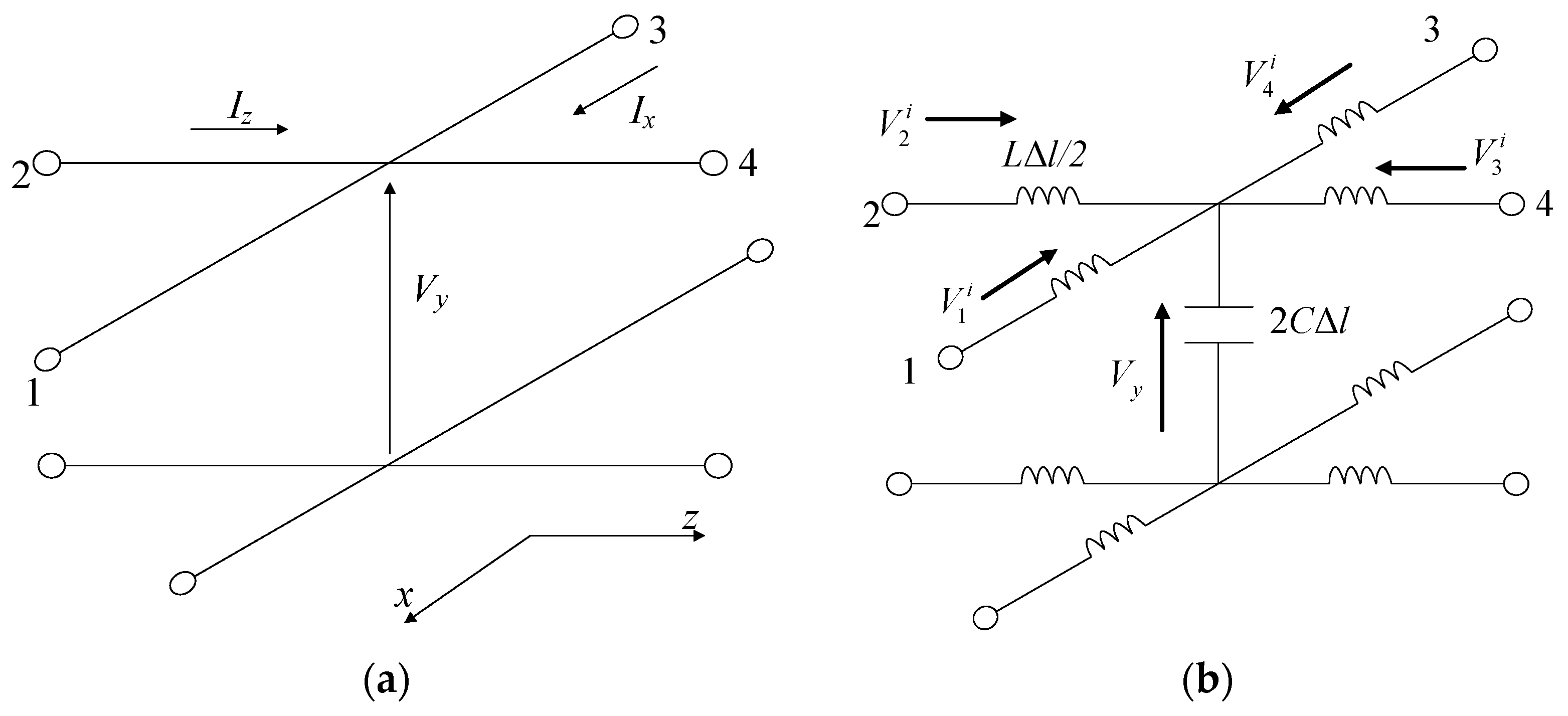
The 2D TLM using a shunt node is shown in
Figure 1. All space can be divided into lots of nodes, as in
Figure 1a.
V and
I are the voltage and current, and the subscripts xyz are the three-dimensional direction. Considering the inductance and capacitance in the branch, the node structure can be represented in
Figure 1b, where
L and
C are the inductance value and capacitance value per meter, respectively. Δ
l is the length of the transmission line. The upper script
i denotes the incident voltage.
Using Kirchhoff’s voltage law along the
x and
z direction, we have
Using Kirchhoff’s Current Law, we obtain
Then, combining these above equations, we obtain
Compared with the Maxwell’s equations for the lossless TM
y case,
where
ε is the dielectric constant of the medium, and
μ is the permeability of the medium. We can establish equivalences and obtain the control parameters of the 2D TLM as follows,
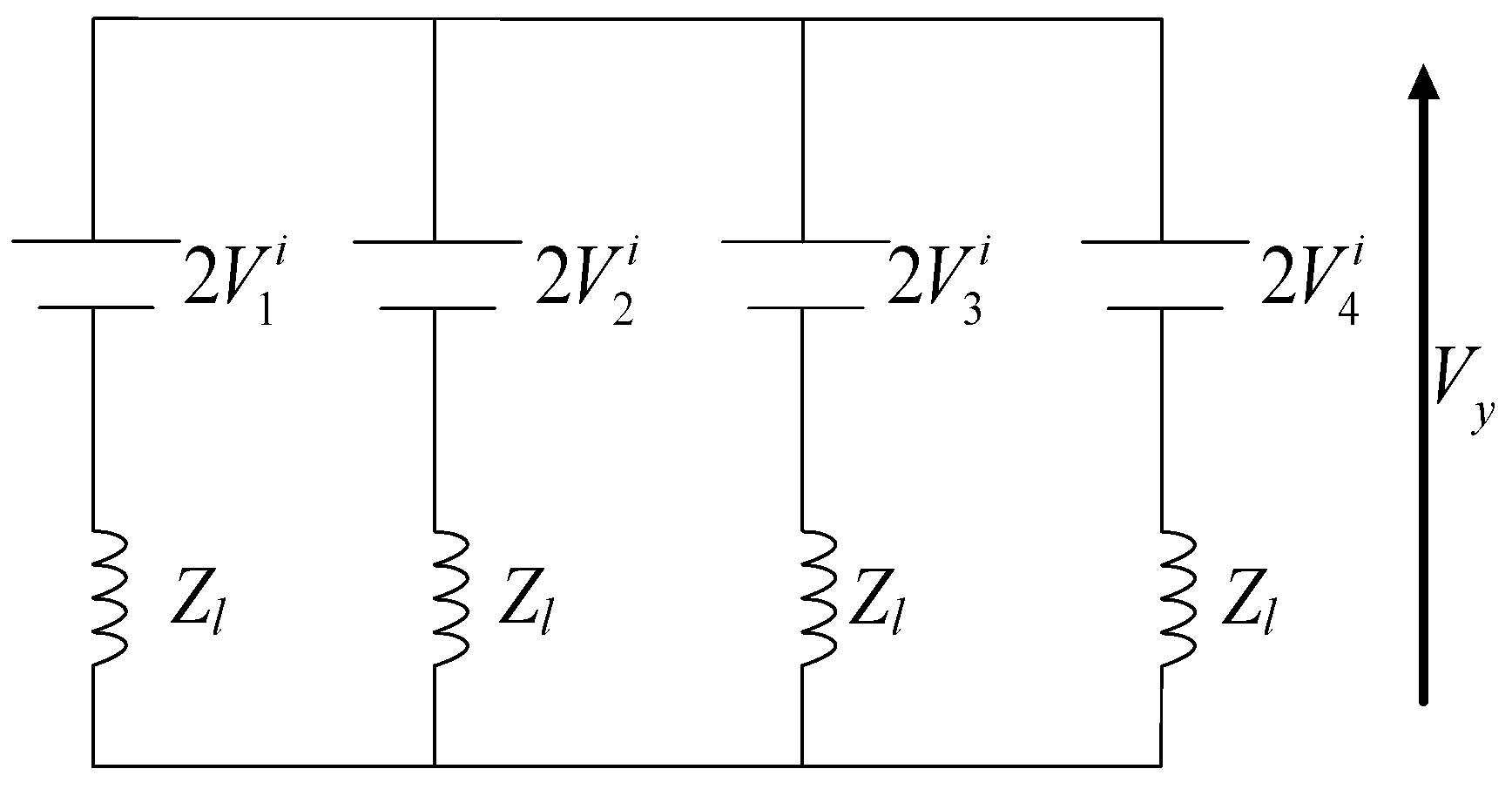
For analyses of the TLM nodes, scattering should be established. Since nodes can be regarded as branches in parallel, we replace each section with its Thevenin’s equivalent and obtain the simplified structure shown in
Figure 2. Then, according to
Figure 1b and using superposition, we have
Thus, the reflected voltage
can be calculated by the difference between the total voltage
Vy and the incident voltage
on this transmission line. It follows that we have the scattering equation and its equivalent matrix:
After that, reflected impulses at the
kth time step become incident on neighboring nodes at the (
k + 1)th time step. That is called a connection, shown as follows:
After obtaining the reflected impulses or voltages, wave propagation can be calculated by repeating the above calculation, and the final voltage distributed on a transmission line can be obtained.
3. Position Sensorless Control of PMSMs Using the TLM Method
The PMSM has been widely applied in industrial fields for its advantages of high efficiency, high power factor, and good dynamic performance. To reduce the cost and improve the reliability of vector-controlled drive systems, position sensorless control strategies of PMSMs have attracted much attention in industrial fields recently. The mainstream sensorless control techniques are based on the voltage equations of PMSMs, where the back EMF or flux linkage contains the position and speed information. The voltage equation of PMSMs can be represented as
where
uα,β and
iα,β are the stator voltages and currents, respectively,
eα,β are the EMF,
Rs is the stator resistance,
Ls is the stator inductance,
ωe is the electrical rotor speed,
θe is the electrical rotor position, and
ψf is the magnetic linkage flux.
To estimate the back EMF from the voltage equation, a state observer is typically used to avoid the direct derivative calculation of the phase current, as follows:
where the superscript denotes the estimates, and
K1,2 are constant gains of the current error. When the estimated current converges to the actual one, the back EMF can be estimated.
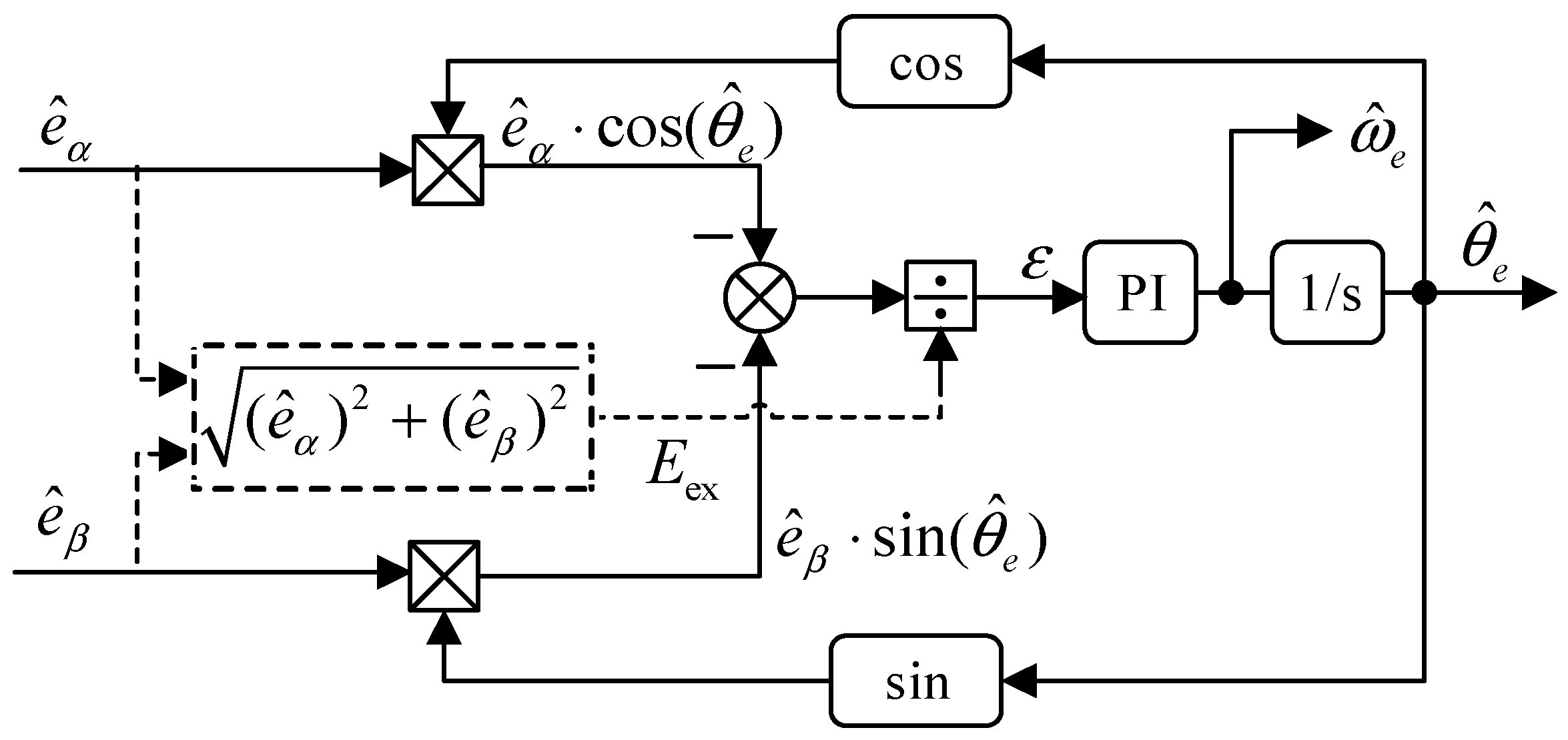
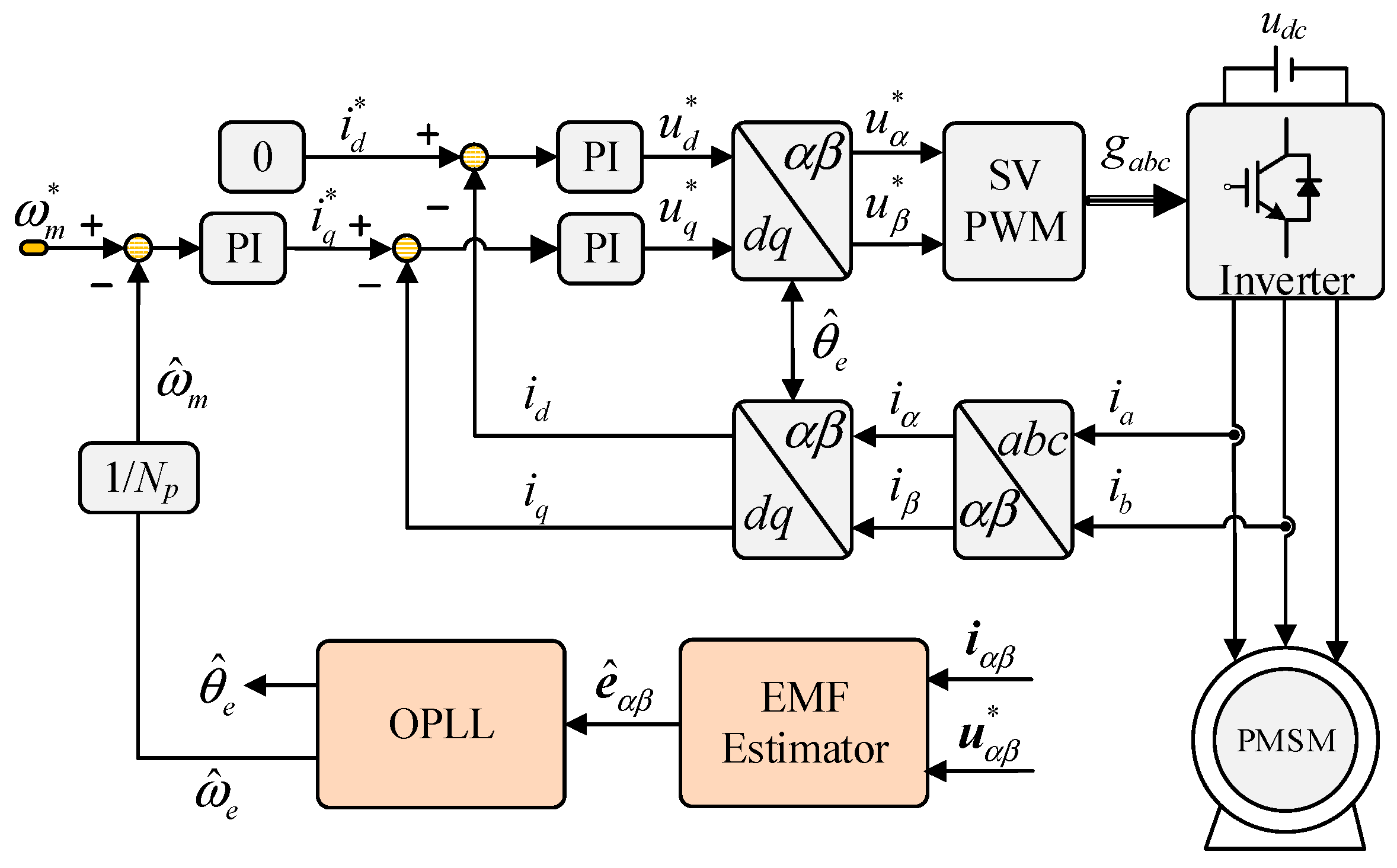
Then, the rotor position can be obtained by an orthogonal phase–locked loop (OPLL) observer, shown in
Figure 3. First, the position estimation error
ε is calculated by input EMF, and the estimated position
. The rotor speed and position can be estimated by a PI controller and integration. Tuning the parameters of the proportion-integral (PI) controller, the bandwidth of the OPLL can be adjusted to achieve better dynamic and steady performance.
The principle of the OPLL can be expressed as
However, in the conventional back EMF method, using an additional observer in (17) results in additional bandwidth reduction. A solution to avoid the observer is numerical methods, but as discussed in the Introduction, existing numerical methods require a high computational burden for multiple iterations. Therefore, the TLM method is used here as an improvement with a simpler structure.
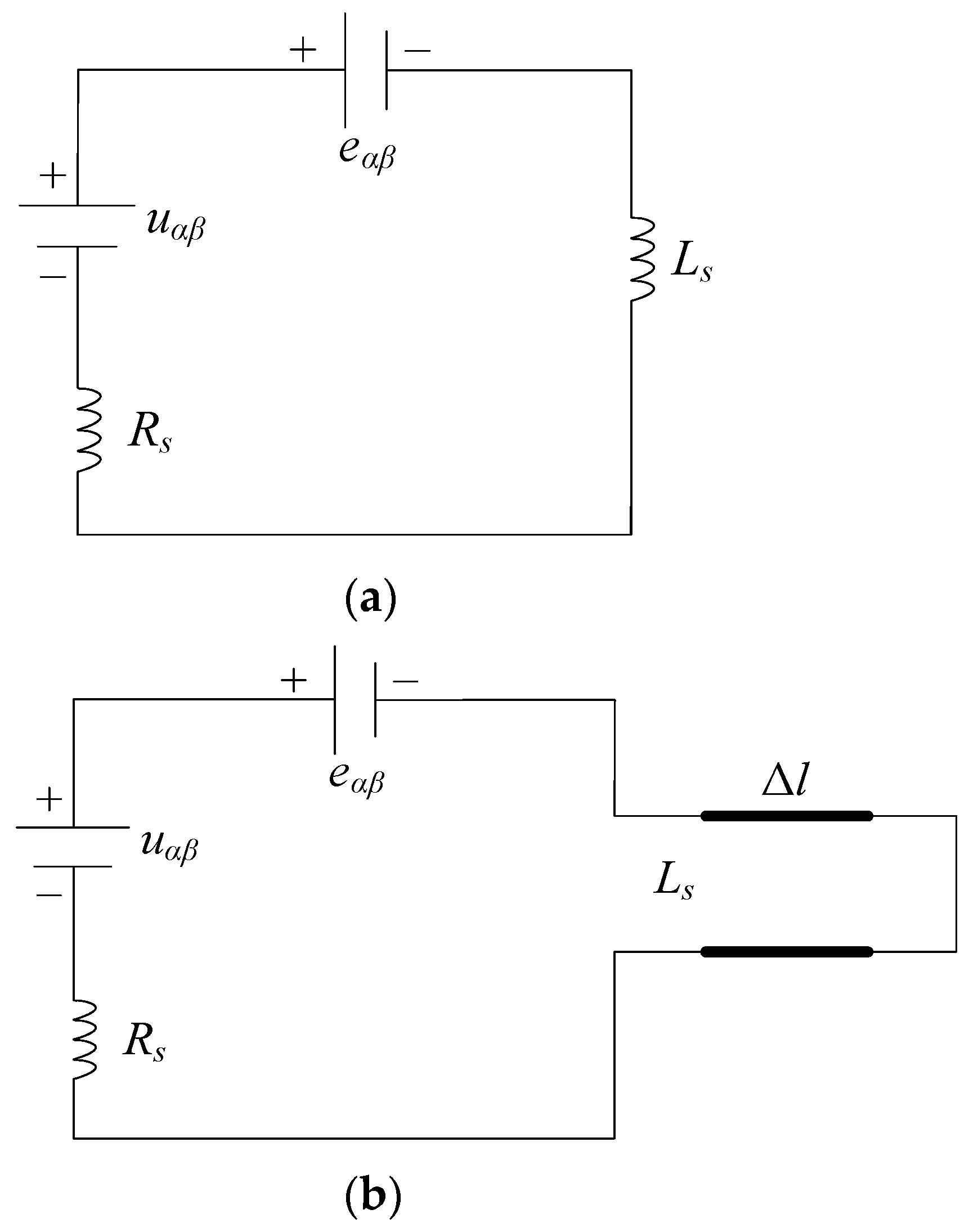
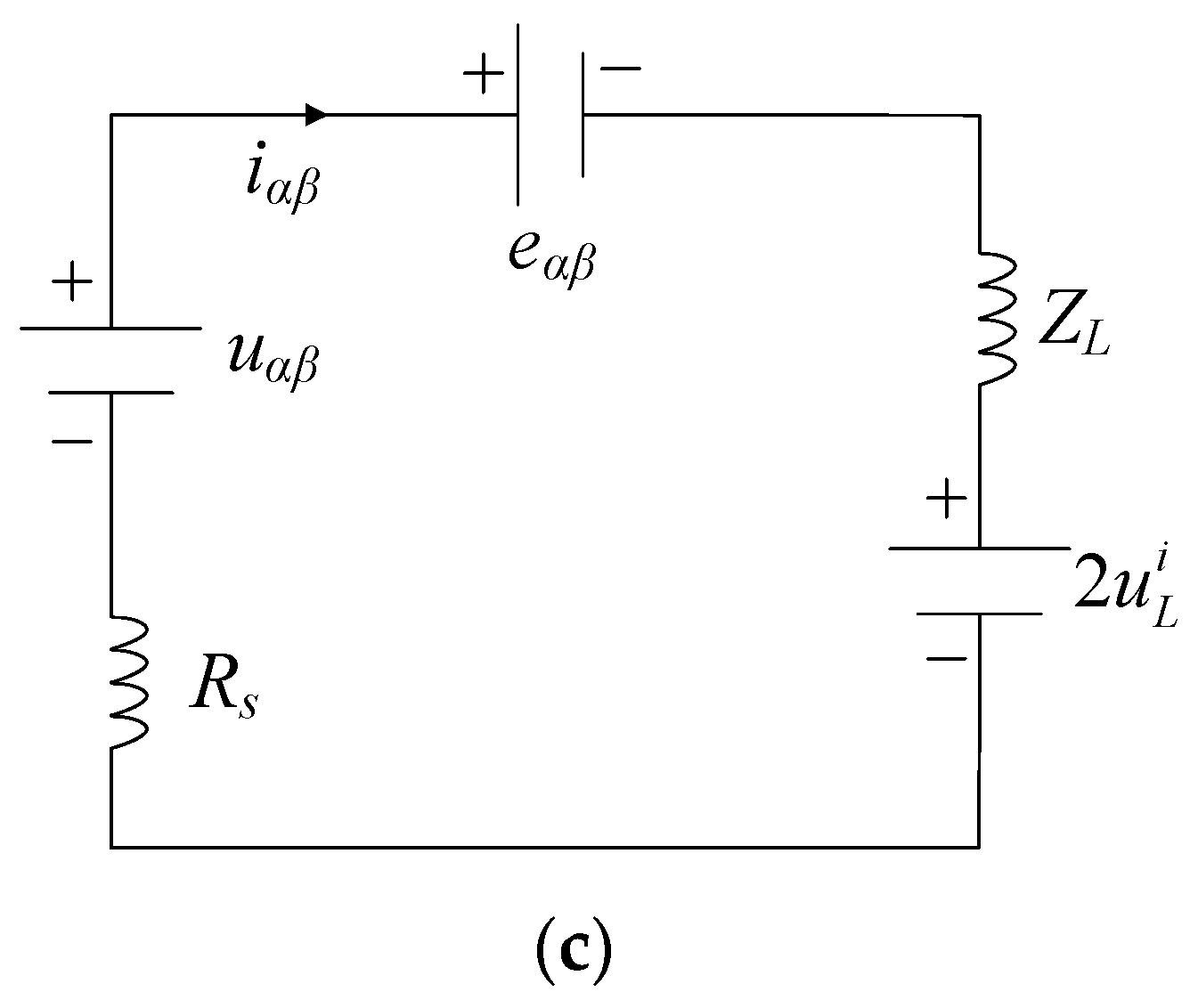
The voltage equation of PMSMs can be drawn as a circuit shown in
Figure 4a. In the TLM theory, the inductance can be regarded as a short-circuit transmission line, as shown in
Figure 4b. The short circuit transmission line can be concluded as a source with
and an impedance of
ZL, where
, and Δ
t is the length of the time step.
To calculate the impedance value of the equivalent circuit, assuming that inductance per unit length on the transmission line is
L0 =
Ls/Δ
l, where Δ
l is the length of the transmission line. According to the link velocity given in (7), we obtain that
where Δ
t is the transmission time, and
C0 is the capacitance per unit length, which is calculated by
where the capacitance existing on a transmission line model can be regarded as the modeling error as it is originally a pure inductance. The modeling error can be reduced when the time step Δ
t is selected to be smaller. In a digital control system, the Δ
t can be equal to the control period. As a result, the impedance of the transmission line can be expressed as
In the position sensorless control, the voltage and currents are known. We should estimate the voltage of the inductance so the EMF can be calculated. The principle of the method is that, first, we can set a control period of all algorithms, e.g., Δt = Ts, which means that the voltage and current are sampled by the frequency of 1/Ts. Then, scattering and connection are implemented with k time steps according to the sampled voltage and the current , to obtain the incident and reflected voltage of the inductance at every time step. Afterward, the estimated EMF at every time step is calculated by the sampled current , the sampled voltage , and the estimated incident voltage.
Initially, the incident voltage
is set as zero. First, the estimated EMF is calculated by the voltage source, the incident voltage, and the impendence and resistant voltage as
The voltage of the inductance is the sum of the incident voltage and the impendence voltage across the transmission line:
Then, the reflected voltage of the TLM at the
kth step can be calculated by the total voltage across the inductance minus the
kth-step incident voltage:
After calculating the reflected voltage, the next-step incident voltage has the same amplitude as the previous reflection but with the inverse direction [
18]:
The estimated EMF at
k time instant is calculated by the sampled current as
Finally, performing the above loop for each control step, the back EMF will be estimated. The rotor position can then be obtained from the OPLL, as mentioned before.
However, in the real-time microcontroller of PMSMs, the voltage cannot be sampled as there is often no high-precision phase voltage sensor. Reference voltages are used in the position estimation. This results in the actual voltage being delayed to the reference voltage and the sampled current not synchronous with the reference voltage used for position estimation. The delay is typically considered as half the control period due to modulation. To consider the delay issue, the proposed method from (24) to (27) should be modified:
where the half delay is considered in the phase current, where the average current between the present value and the previous one-period value is considered. Please note that the numerical calculation needs to consider the delay effects, which may be different according to the digital logic in various microcontrollers.
Compared with the conventional current-error-based observer in (17), the proposed TLM-based estimator uses the concept of the TLM for solving the back EMF equation. It does not require a long convergence process using the state equations. In contrast, setting the transmission line model to solve the inductance voltage can simply obtain the back EMF. Therefore, it inherently avoids a slower convergence and improves dynamic performance.
Another concern for EMF-based position estimation is the parameter uncertainties. Notably, all EMF-based position estimations, including the proposed scheme, suffer from parameter sensitivity, as it is an inherent property [
4]. Additional parameter estimation algorithms or offline-measured lookup tables of motor parameters can be applied to solve the issue.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}