
Large Language Model-Based Tuning Assistant for Variable Speed PMSM Drive with Cascade Control Structure



Abstract
1. Introduction
2. Materials and Methods
2.1. Determination of the Parameters of the PMSM
2.1.1. Electrical Parameters of the Motor
2.1.2. Mechanical Parameters of the Motor
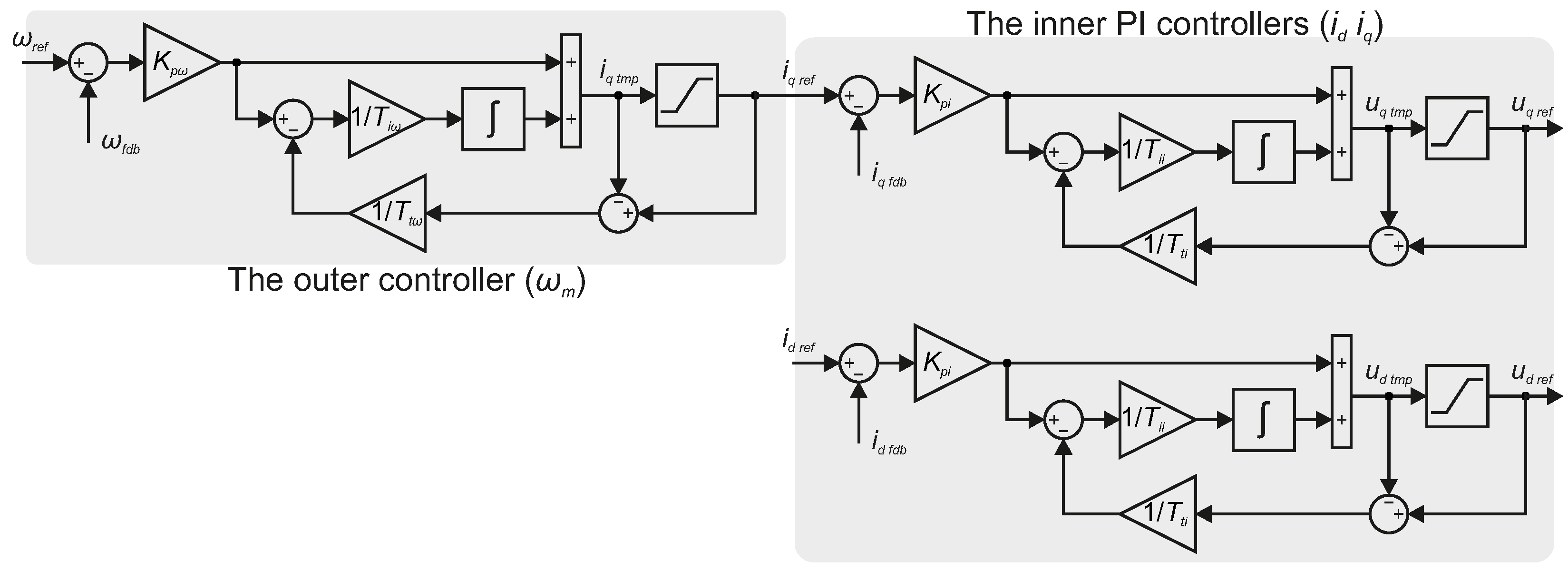
2.2. Cascade Control Structure
2.3. Tuning Approaches
2.3.1. Analytical-Based Tuning
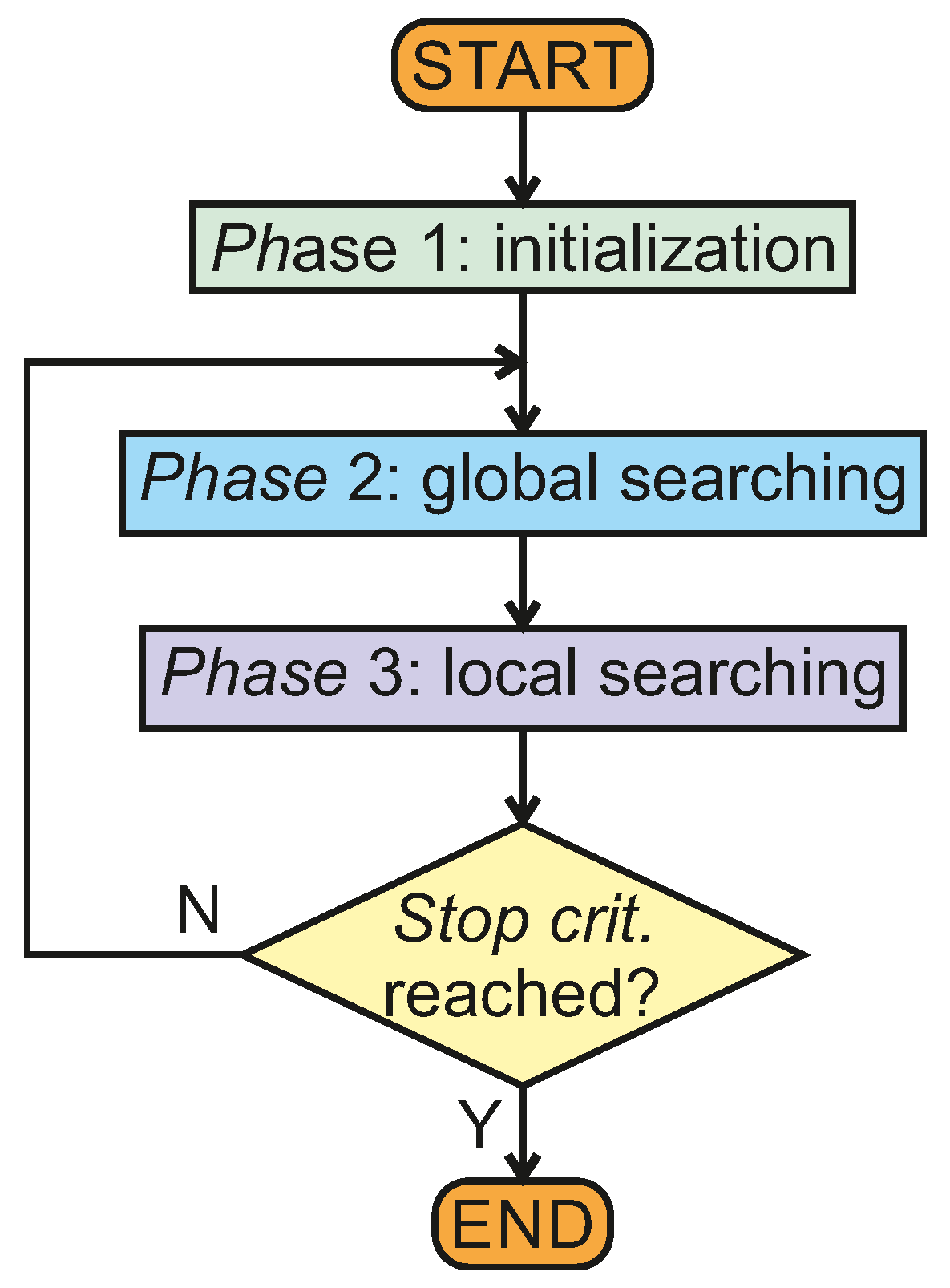
2.3.2. Swarm-Based Tuning
2.3.3. LLM-Based Tuning
3. Results
3.1. Swarm-Based Tuning
3.2. Analytical-Based Tuning

3.3. LLM-Based Tuning
3.4. Quantitative Analysis
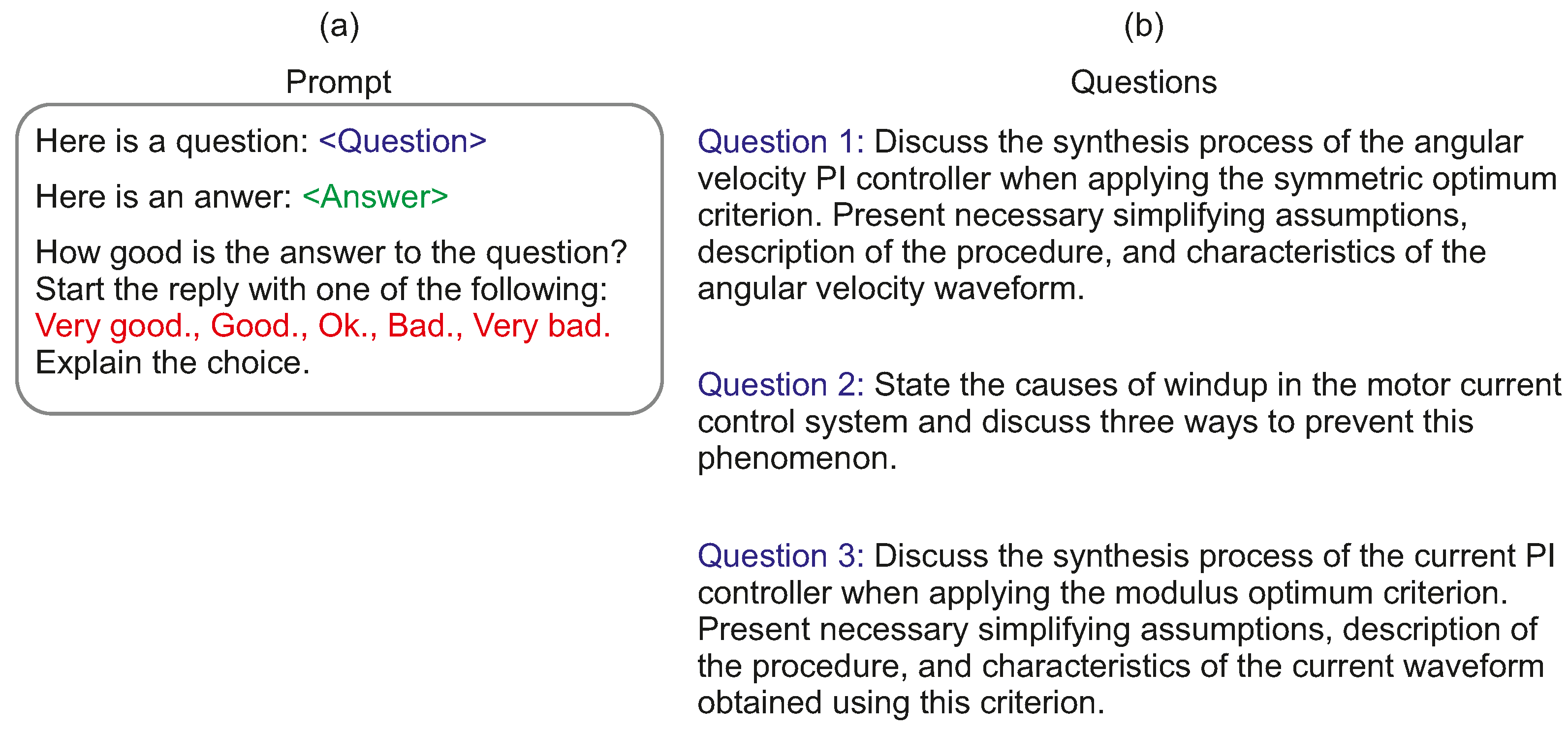
3.4.1. Prompt Scoring
3.4.2. Torque Ripple
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| LLM | Large Language Model |
| PMSM | Permanent Magnet Synchronous Motor |
| VSC | Variable Speed Drive |
| TA | Tuning Assistant |
| CCS | Cascade Control Structure dichroism |
| AC | Alternating Current |
| SBMA | Swarm-Based Metaheuristic Algorithm |
| PID | Proportional–Integral–Derivative |
| AI | Artificial Intelligence |
| CNC | Computerized Numerical Control |
| IMC | Internal Model Control |
| ITSE | Integral of Time Squared Error |
| IAE | Integral of Absolute Error |
| ABC | Artificial Bee Colony |
| PSO | Particle Swarm Optimization |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unit | Symbol | Value | Unit | |
|---|---|---|---|---|---|---|
| 4 | A | p | 3 | - | ||
| 4.6 | Nm | 0.014 | Nms/rad | |||
| 1.05 | 0.0177 | |||||
| 0.0127 | H | 100 | - | |||
| 0.25 | Wb | 22,000 | Hz | |||
| 1.145 | Nm/A | 4.55 | μs |
Appendix B
| Parameter | Symbol | Value |
|---|---|---|
| No of optimized parameters | D | 6 |
| No of colony size | NP | 10 |
| No of food sources | FN | NP/2 |
| Maximum no of cycles | MCN | 20 |
| Control parameter limit | limit | FN × D |
| Scout production period | SPP | FN × D |
| Modification rate | MR | 0.8 |
Appendix C
| ChatGPT | Copilot | Tuning Assistant |
|---|---|---|
| 1. How should I tune the current PI controller for the PMSM drive? | 1. How should I tune the current PI controller for the PMSM drive? | 1. How should I tune the current PI controller for the PMSM drive? |
| 2. OK, I observe an overshoot during velocity transient and current ripple during steady-state. What do you suggest? | 2. Ok, can you calculate the proportional gain and the integration time constant of the PI current controller if I give you a rise time and basic parameters of the motor? | 2. Ok, I prefer the current control without overshoot, could you please give me the formulas for PI current controller? |
| 3. I noticed that I have zero anti-windup coefficients in both control loops. How do I choose them? | 3. Ok, R = 1.05, L = 0.0127, and Tr = 0.005 | 3. Thanks. I need clarification on the current rise in time value. |
| 4. Ok, how to determine the optimal value of the Proportional Gain (Kp) of the velocity controller in PMSM for the moment of inertia equal to 0.0177 [kgm·m] and torque constant equal to 1.1447 [Nm/A] | 4. Thanks, how should I tune the velocity PI controller for the PMSM drive? | |
| 5. Thanks. And what about the optimal value of the Integral Gain (ki) for this velocity controller? | 5. I noticed that I have zero anti-windup coefficients in both control loops. How do I choose them? | |
| 6. I noticed that I have zero anti-windup coefficients in both control loops. How do I choose them? |
References
- Huanhuan, R.; Zhang, L.; Su, C.; Jian, S.; Liu, D. Research on fuzzy control of permanent magnet synchronous motor for a mobile robot. In Proceedings of the Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; Volume 1754, p. 012172. [Google Scholar]
- Li, P.; Xu, X.; Yang, S.; Jiang, X. Open circuit fault diagnosis strategy of PMSM drive system based on grey prediction theory for industrial robot. Energy Rep. 2023, 9, 313–320. [Google Scholar] [CrossRef]
- Che, X.; Ma, Z.; Qi, X.; Li, W.; Niu, H.; Yan, C. Barrier-Function-Based Adaptive Fast-Terminal Sliding-Mode Control for a PMSM Speed-Regulation System. Electronics 2024, 13, 1091. [Google Scholar] [CrossRef]
- Farah, N.; Lei, G.; Zhu, J.; Guo, Y. Robust Model-Free Reinforcement Learning Based Current Control of PMSM Drives. IEEE Trans. Transp. Electrif. 2024, 1. [Google Scholar] [CrossRef]
- Di Fonso, R.; Cecati, C. Navigation and Motors Control of a Differential Drive Mobile Robot. In Proceedings of the 2023 International Conference on Control, Automation and Diagnosis (ICCAD), Rome, Italy, 10–12 May 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Y.; Fang, S.; Hu, J. Active disturbance rejection control based on deep reinforcement learning of PMSM for more electric aircraft. IEEE Trans. Power Electron. 2022, 38, 406–416. [Google Scholar] [CrossRef]
- Aggarwal, A.; Meier, M.; Strangas, E.; Agapiou, J. Analysis of Modular Stator PMSM Manufactured Using Oriented Steel. Energies 2021, 14, 6583. [Google Scholar] [CrossRef]
- Tarczewski, T.; Szczepanski, R.; Erwinski, K.; Hu, X.; Grzesiak, L.M. A Novel Sensitivity Analysis to Moment of Inertia and Load Variations for PMSM Drives. IEEE Trans. Power Electron. 2022, 37, 13299–13309. [Google Scholar] [CrossRef]
- Ewert, P.; Kowalski, C.T.; Jaworski, M. Comparison of the Effectiveness of Selected Vibration Signal Analysis Methods in the Rotor Unbalance Detection of PMSM Drive System. Electronics 2022, 11, 1748. [Google Scholar] [CrossRef]
- Zuo, Y.; Lai, C.; Iyer, K.L.V. A review of sliding mode observer based sensorless control methods for PMSM drive. IEEE Trans. Power Electron. 2023, 38, 11352–11367. [Google Scholar] [CrossRef]
- Wróbel, K.; Szabat, K.; Wicher, B.; Brock, S. Hybrydowy ślizgowy obserwator Luenbergera w układzie napędowym z połączeniem elastycznym. Przeglad Elektrotechniczny 2024, 2024, 104–107. [Google Scholar] [CrossRef]
- Kaminski, M.; Malarczyk, M. Hardware implementation of neural shaft torque estimator using low-cost microcontroller board. In Proceedings of the 2021 25th International Conference on Methods and Models in Automation and Robotics (MMAR), Międzyzdroje, Poland, 23–26 August 2021; IEEE: Warszawa, Poland, 2021; pp. 372–377. [Google Scholar]
- Jankowska, K.; Dybkowski, M. Experimental Analysis of the Current Sensor Fault Detection Mechanism Based on Neural Networks in the PMSM Drive System. Electronics 2023, 12, 1170. [Google Scholar] [CrossRef]
- Jin, L.; Mao, Y.; Wang, X.; Lu, L.; Wang, Z. Online Data-Driven Fault Diagnosis of Dual Three-Phase PMSM Drives Considering Limited Labeled Samples. IEEE Trans. Ind. Electron. 2023, 71, 6797–6808. [Google Scholar] [CrossRef]
- Niewiara, L.J.; Szczepanski, R.; Tarczewski, T.; Grzesiak, L.M. State Feedback Speed Control with Periodic Disturbances Attenuation for PMSM Drive. Energies 2022, 15, 587. [Google Scholar] [CrossRef]
- Qian, W.; Panda, S.K.; Xu, J.X. Torque ripple minimization in PM synchronous motors using iterative learning control. IEEE Trans. Power Electron. 2004, 19, 272–279. [Google Scholar] [CrossRef]
- Chung, D.W.; Sul, S.K. Analysis and compensation of current measurement error in vector-controlled AC motor drives. IEEE Trans. Ind. Appl. 1998, 34, 340–345. [Google Scholar] [CrossRef]
- Tarczewski, T.; Niewiara, L.; Grzesiak, L. Artificial bee colony based state feedback position controller for PMSM servo-drive—The efficiency analysis. Bull. Pol. Acad. Sci. Tech. Sci. 2020, 68, 997–1007. [Google Scholar] [CrossRef]
- Templos-Santos, J.L.; Aguilar-Mejia, O.; Peralta-Sanchez, E.; Sosa-Cortez, R. Parameter Tuning of PI Control for Speed Regulation of a PMSM Using Bio-Inspired Algorithms. Algorithms 2019, 12, 54. [Google Scholar] [CrossRef]
- Aguilar-Mejía, O.; Minor-Popocatl, H.; Tapia-Olvera, R. Comparison and ranking of metaheuristic techniques for optimization of PI controllers in a machine drive system. Appl. Sci. 2020, 10, 6592. [Google Scholar] [CrossRef]
- Hussain, H.A. Tuning and Performance Evaluation of 2DOF PI Current Controllers for PMSM Drives. IEEE Trans. Transp. Electrif. 2021, 7, 1401–1414. [Google Scholar] [CrossRef]
- Ren, J.; Ye, Y.; Xu, G.; Zhao, Q.; Zhu, M. Uncertainty-and-Disturbance-Estimator-Based Current Control Scheme for PMSM Drives with a Simple Parameter Tuning Algorithm. IEEE Trans. Power Electron. 2017, 32, 5712–5722. [Google Scholar] [CrossRef]
- Rajesh Kumar Mahto, A.M.; Bansal, R.C. Controller design using PSO and WOA algorithm for enhanced performance of vector-controlled PMSM drive. Int. J. Model. Simul. 2024. [Google Scholar] [CrossRef]
- Achour, H.B.; Ziani, S.; Chaou, Y.; El Hassouani, Y.; Daoudia, A. Permanent magnet synchronous motor PMSM control by combining vector and PI controller. WSEAS Trans. Syst. Control 2022, 17, 244–249. [Google Scholar] [CrossRef]
- Umland, J.W.; Safiuddin, M. Magnitude and symmetric optimum criterion for the design of linear control systems: What is it and how does it compare with the others? IEEE Trans. Ind. Appl. 1990, 26, 489–497. [Google Scholar] [CrossRef]
- Harnefors, L.; Nee, H.P. Model-based current control of AC machines using the internal model control method. IEEE Trans. Ind. Appl. 1998, 34, 133–141. [Google Scholar] [CrossRef]
- Pietrusewicz, K.; Waszczuk, P.; Kubicki, M. MFC/IMC control algorithm for reduction of load torque disturbance in PMSM servo drive systems. Appl. Sci. 2018, 9, 86. [Google Scholar] [CrossRef]
- Song, W.; Li, J.; Ma, C.; Xia, Y.; Yu, B. A Simple Tuning Method of PI regulators in FOC for PMSM Drives based on Deadbeat Predictive Conception. IEEE Trans. Transp. Electrif. 2024, 10, 9852–9863. [Google Scholar] [CrossRef]
- Nasab, M.R.; Ghalebani, P.; Bruno, S.; Cometa, R.; La Scala, M. Adaptive PI Control of PMSM for Electric Vehicle Application Based on Sliding-mode Extremum Seeking Algorithm. In Proceedings of the 2023 Asia Meeting on Environment and Electrical Engineering (EEE-AM), Hanoi, Vietnam, 13 November 2023; IEEE: Ho Chi Minh City, Vietnam, 2023; pp. 1–6. [Google Scholar]
- Chang, Y.; Wang, X.; Wang, J.; Wu, Y.; Yang, L.; Zhu, K.; Chen, H.; Yi, X.; Wang, C.; Wang, Y.; et al. A survey on evaluation of large language models. ACM Trans. Intell. Syst. Technol. 2024, 15, 1–45. [Google Scholar] [CrossRef]
- Kevian, D.; Syed, U.; Guo, X.; Havens, A.; Dullerud, G.; Seiler, P.; Qin, L.; Hu, B. Capabilities of large language models in control engineering: A benchmark study on gpt-4, claude 3 opus, and gemini 1.0 ultra. arXiv 2024, arXiv:2404.03647. [Google Scholar]
- de Zarzà, I.; de Curtò, J.; Roig, G.; Calafate, C.T. Llm adaptive pid control for b5g truck platooning systems. Sensors 2023, 23, 5899. [Google Scholar] [CrossRef]
- Bobek, V. PMSM electrical parameters measurement. Free. Semicond. 2013, 7, 13. [Google Scholar]
- Szczepanski, R.; Tarczewski, T.; Niewiara, L.J.; Stojic, D. Identification of mechanical parameters in servo-drive system. In Proceedings of the 2021 IEEE 19th International Power Electronics and Motion Control Conference (PEMC), Gliwice, Poland, 25–29 April 2021; IEEE: Warszawa, Poland, 2021; pp. 566–573. [Google Scholar]
- Tarczewski, T.; Skiwski, M.; Grzesiak, L.M.; Zieliński, M. PMSM servo-drive fed by SiC MOSFETs based VSI. Power Electron. Drives 2018, 3, 35–45. [Google Scholar] [CrossRef]
- Astrom, K.J.; Hagglund, T. PID controllers. In Theory, Design, and Tuning Problems; Instrument Society of America: Pittsburgh, PA, USA, 1995. [Google Scholar]
- Bingi, K.; Ibrahim, R.; Karsiti, M.N.; Hassan, S.M.; Harindran, V.R. A comparative study of 2DOF PID and 2DOF fractional order PID controllers on a class of unstable systems. Arch. Control Sci. 2018, 28, 635–682. [Google Scholar] [CrossRef]
- Dannehl, J.; Fuchs, F.W.; Thøgersen, P.B. PI state space current control of grid-connected PWM converters with LCL filters. IEEE Trans. Power Electron. 2010, 25, 2320–2330. [Google Scholar] [CrossRef]
- Roni, M.H.K.; Rana, M.; Pota, H.; Hasan, M.M.; Hussain, M.S. Recent trends in bio-inspired meta-heuristic optimization techniques in control applications for electrical systems: A review. Int. J. Dyn. Control 2022, 10, 999–1011. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Z.; Huang, X.; Wu, C.; Liu, Q.; Jiang, G.; Pu, Y.; Lei, Y.; Chen, X.; Wang, X.; et al. When large language models meet personalization: Perspectives of challenges and opportunities. World Wide Web 2024, 27, 42. [Google Scholar] [CrossRef]
- Web Page of a Software Solutions Provider That Enables Creating Custom GPT Chatbot. Available online: www.ordemio.com/ai-chatbot (accessed on 15 December 2024).
- Tarczewski, T.; Grzesiak, L.M. Constrained State Feedback Speed Control of PMSM Based on Model Predictive Approach. IEEE Trans. Ind. Electron. 2016, 63, 3867–3875. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. Artificial bee colony (ABC) optimization algorithm for solving constrained optimization problems. In Proceedings of the International Fuzzy Systems Association World Congress, Cancun, Mexico, 18–21 June 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 789–798. [Google Scholar]
- Liusie, A.; Manakul, P.; Gales, M.J. Zero-shot NLG evaluation through pairware comparisons with llms. arXiv 2023, arXiv:2307.07889. [Google Scholar]
- Schneider, J.; Schenk, B.; Niklaus, C. Towards llm-based autograding for short textual answers. arXiv 2023, arXiv:2309.11508. [Google Scholar]
- Liu, Y.; Cong, T.; Zhao, Z.; Backes, M.; Shen, Y.; Zhang, Y. Robustness Over Time: Understanding Adversarial Examples’ Effectiveness on Longitudinal Versions of Large Language Models. arXiv 2023, arXiv:2308.07847. [Google Scholar]
- Tarczewski, T.; Grzesiak, L. Torque ripple minimization for PMSM using voltage matching circuit and neural network based adaptive state feedback control. In Proceedings of the 2014 16th European Conference on Power Electronics and Applications, Lappeenranta, Finland, 26–28 August 2014; IEEE: Espoo, Finland, 2014; pp. 1–10. [Google Scholar]
- Li, X.; Zhang, Y.; Malthouse, E.C. Exploring fine-tuning chatgpt for news recommendation. arXiv 2023, arXiv:2311.05850. [Google Scholar]
- Latif, E.; Zhai, X. Fine-tuning ChatGPT for automatic scoring. Comput. Educ. Artif. Intell. 2024, 6, 100210. [Google Scholar] [CrossRef]



| No. | Auto-Tuning * | Method | Iter. no. | Time [mins] | User exp. | Figure | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 5.58 | 82.85 | 1 | 30.89 | 1000 | 1 | 0.00197 | N | TA | – | ≈1 | adv | Figure 9e,f |
| 2 | 0.5 | 200 | 1 | 30 | 200 | 1 | 0.00198 | Y | empirical | 74 | 80 | beg | – |
| 3 | 0.9 | 45 | 0 | 350 | 4 | 0.8 | 0.00198 | Y | empirical | 80 | – | beg | – |
| 4 | 217.15 | 0 | 371.45 | 134.49 | 500 | 3.16 | 0.00198 | Y | ABC | 500 | 70 | adv | Figure 6e,f |
| 5 | 0.39 | 144.44 | 0.1 | 210.1 | 0.0001 | 1 | 0.00199 | N | analytical | 80 | – | beg | – |
| 6 | 8.37 | 0.0001 | 1000 | 382.29 | 0.0004 | 100 | 0.002 | N | analytical | 109 | 30 | beg | Figure 7e,f |
| 7 | 2.79 | 82.85 | 0.8 | 152.72 | 1098 | 0.5 | 0.002 | N | analytical | 32 | – | beg | – |
| 8 | 278.96 | 82.85 | 3.37 | 388.98 | 388.98 | 1 | 0.0021 | N | ChatGPT | – | ≈3 | adv | Figure 9a,b |
| 9 | 0.56 | 82.72 | 0.8 | 15.29 | 109.86 | 1.12 | 0.0021 | N | analytical | 41 | 50 | beg | – |
| 10 | 0.5 | 231.11 | 7 | 15.29 | 109.86 | 1.27 | 0.0021 | N | analytical | 70 | – | beg | – |
| 11 | 0.23 | 82.72 | 0 | 152.97 | 0.0009 | 20 | 0.0021 | N | analytical | 34 | 71 | beg | – |
| 12 | 0.28 | 120.7 | 1 | 16.97 | 549.31 | 50 | 0.0022 | N | analytical | 27 | – | beg | – |
| 13 | 2.8 | 82.7 | 0 | 5493.1 | 0.0002 | 5 | 0.0022 | N | analytical | 37 | 56 | beg | – |
| 14 | 2.5 | 12.5 | 0.7 | 17.5 | 25 | 1.25 | 0.0023 | N | empirical | 42 | 15 | adv | – |
| 15 | 0.5 | 60 | 62 | 10 | 120 | 190 | 0.0026 | Y | empirical | 120 | – | beg | – |
| 16 | 1 | 300 | 5 | 20 | 100 | 40 | 0.0026 | Y | empirical | 93 | – | adv | – |
| 17 | 0.4 | 185 | 30 | 150 | 90 | 30 | 0.003 | N | empirical | 115 | 75 | beg | – |
| 18 | 0.75 | 38.52 | 0 | 44.7 | 92.52 | 0 | 0.003 | N | analytical | 98 | – | beg | – |
| 19 | 0.47 | 963.65 | 19.56 | 5.81 | 94.45 | 19.96 | 0.003 | N | analytical | 14 | – | adv | Figure 7c,d |
| 20 | 0.056 | 82.85 | 0.7 | 17.5 | 27.5 | 1.5 | 0.0032 | N | an. & em. | 55 | 10 | adv | – |
| 21 | 0.35 | 750 | 200 | 100 | 110 | 190 | 0.0034 | Y | empirical | 91 | 60 | beg | – |
| 22 | 1.21 | 44.95 | 1 | 7.73 | 45.14 | 15 | 0.0042 | Y | PSO | 2757 | 120 | adv | Figure 6c,d |
| 23 | 0.103 | 82.72 | 0 | 5 | 50 | 1 | 0.0044 | N | an. & em. | – | 45 | adv | Figure 7a,b |
| 24 | 1.4 | 82.72 | 0 | 15.29 | 1.4 | 5 | 0.0045 | Y | analytical | 47 | 66 | beg | – |
| 25 | 0.36 | 250 | 65 | 75 | 30 | 100 | 0.0091 | Y | empirical | 238 | 75 | beg | – |
| 26 | 0.019 | 11.88 | 40.42 | 9.47 | 37.86 | 189.86 | 0.013 | N | ABC * | 430 | 24 | adv | Figure 6a,b |
| 27 | 0.011 | 82.72 | 0.1 | 3.05 | 0.046 | 0 | 0.054 | N | analytical | 13 | 48 | beg | – |
| 28 | 0.28 | 82.85 | 1 | 0.3 | 0.8 | 1 | 3.22 | N | an. & em. | 21 | 16 | adv | – |
| 29 | 0.64 | 3.81 | 3.81 | 0.16 | 0.12 | 0.12 | 10.72 | N | Copilot | – | ≈2 | adv | Figure 9c,d |
| No. | Figure | Method | [A] | [Nm] | [%] |
|---|---|---|---|---|---|
| 1 | Figure 6b | ABC | 0.46 | 0.53 | 11.5 |
| 2 | Figure 6d | PSO | 0.47 | 0.54 | 11.8 |
| 3 | Figure 6e | ABC | 1.12 | 1.28 | 27.9 |
| 4 | Figure 7b | analytical and empirical | 0.54 | 0.62 | 13.5 |
| 5 | Figure 7d | analytical | 0.46 | 0.53 | 11.6 |
| 6 | Figure 7e | analytical | 1.25 | 1.43 | 31.2 |
| 7 | Figure 9b | ChatGPT | 2.71 | 3.10 | 67.7 |
| 8 | Figure 9d | Copilot | 0.44 | 0.50 | 10.9 |
| 9 | Figure 9e | Tuning Assistant | 0.57 | 0.65 | 14.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tarczewski, T.; Stojic, D.; Dzielinski, A. Large Language Model-Based Tuning Assistant for Variable Speed PMSM Drive with Cascade Control Structure. Electronics 2025, 14, 232. https://doi.org/10.3390/electronics14020232
Tarczewski T, Stojic D, Dzielinski A. Large Language Model-Based Tuning Assistant for Variable Speed PMSM Drive with Cascade Control Structure. Electronics. 2025; 14(2):232. https://doi.org/10.3390/electronics14020232
Chicago/Turabian StyleTarczewski, Tomasz, Djordje Stojic, and Andrzej Dzielinski. 2025. "Large Language Model-Based Tuning Assistant for Variable Speed PMSM Drive with Cascade Control Structure" Electronics 14, no. 2: 232. https://doi.org/10.3390/electronics14020232
APA StyleTarczewski, T., Stojic, D., & Dzielinski, A. (2025). Large Language Model-Based Tuning Assistant for Variable Speed PMSM Drive with Cascade Control Structure. Electronics, 14(2), 232. https://doi.org/10.3390/electronics14020232