
Toward Intelligent Underwater Acoustic Systems: Systematic Insights into Channel Estimation and Modulation Methods



Abstract
1. Introduction
1.1. Motivation for a Systematic Literature Review
1.2. State-of-the-Art Review Articles and Their Limitations
1.3. Research Questions
1.4. SLR Framework
2. Literature Review Methodology
2.1. Detailed Exploration of Category Backgrounds
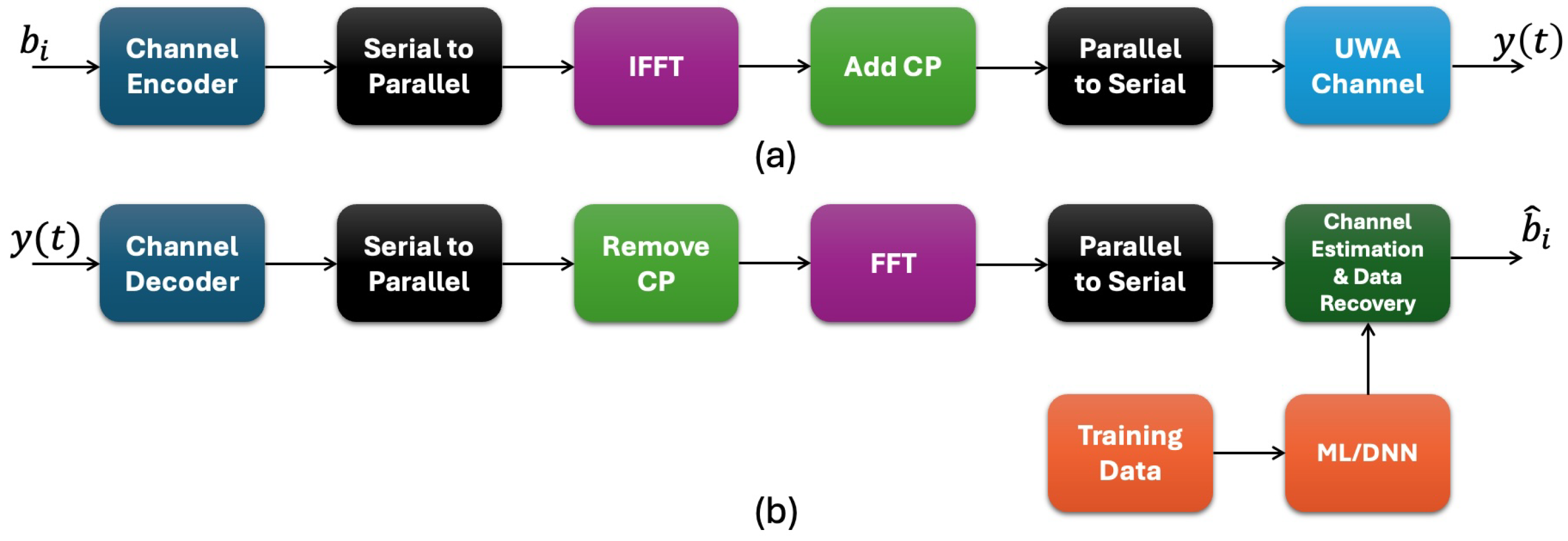
2.1.1. Channel Estimation
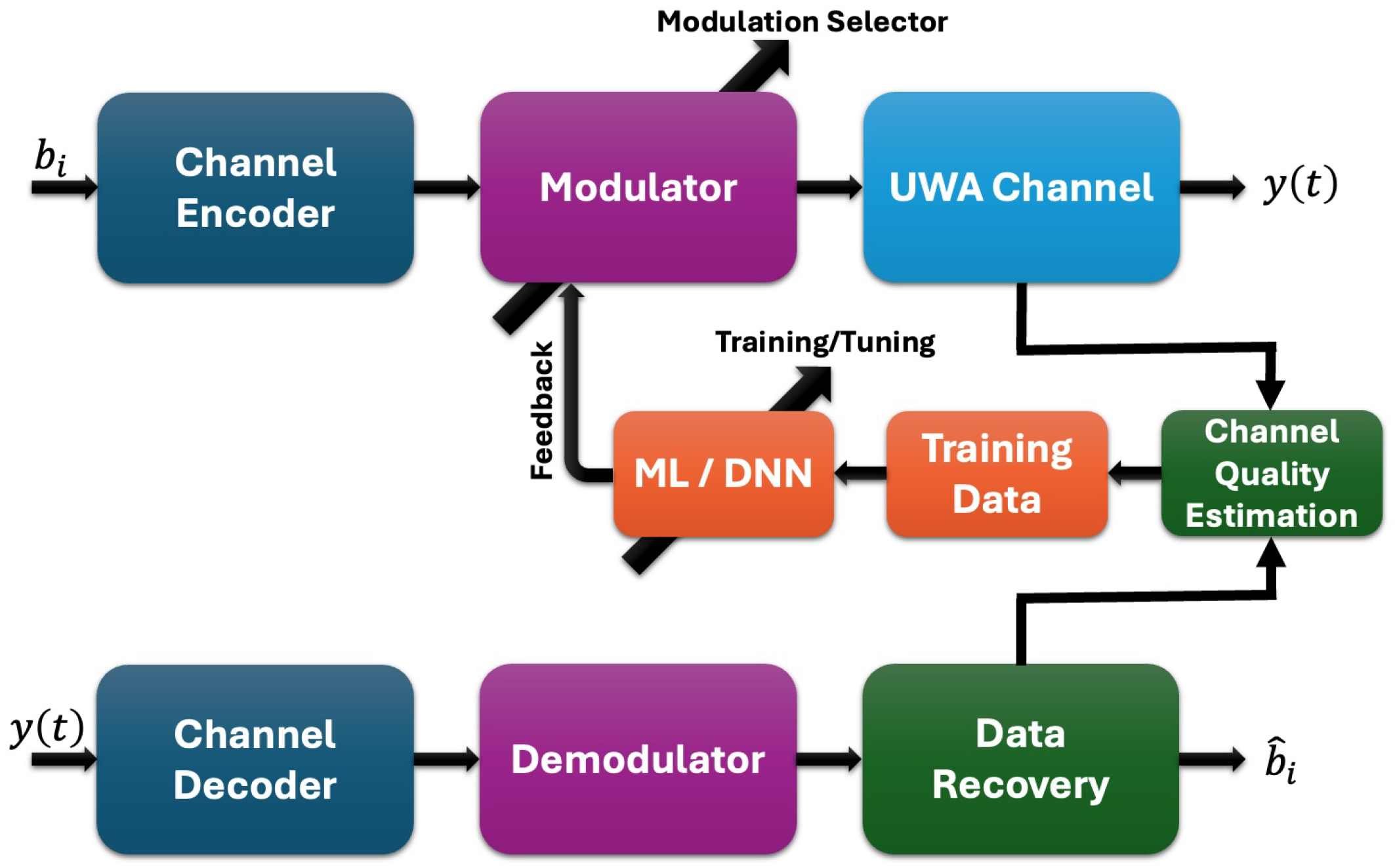
2.1.2. Adaptive Modulation
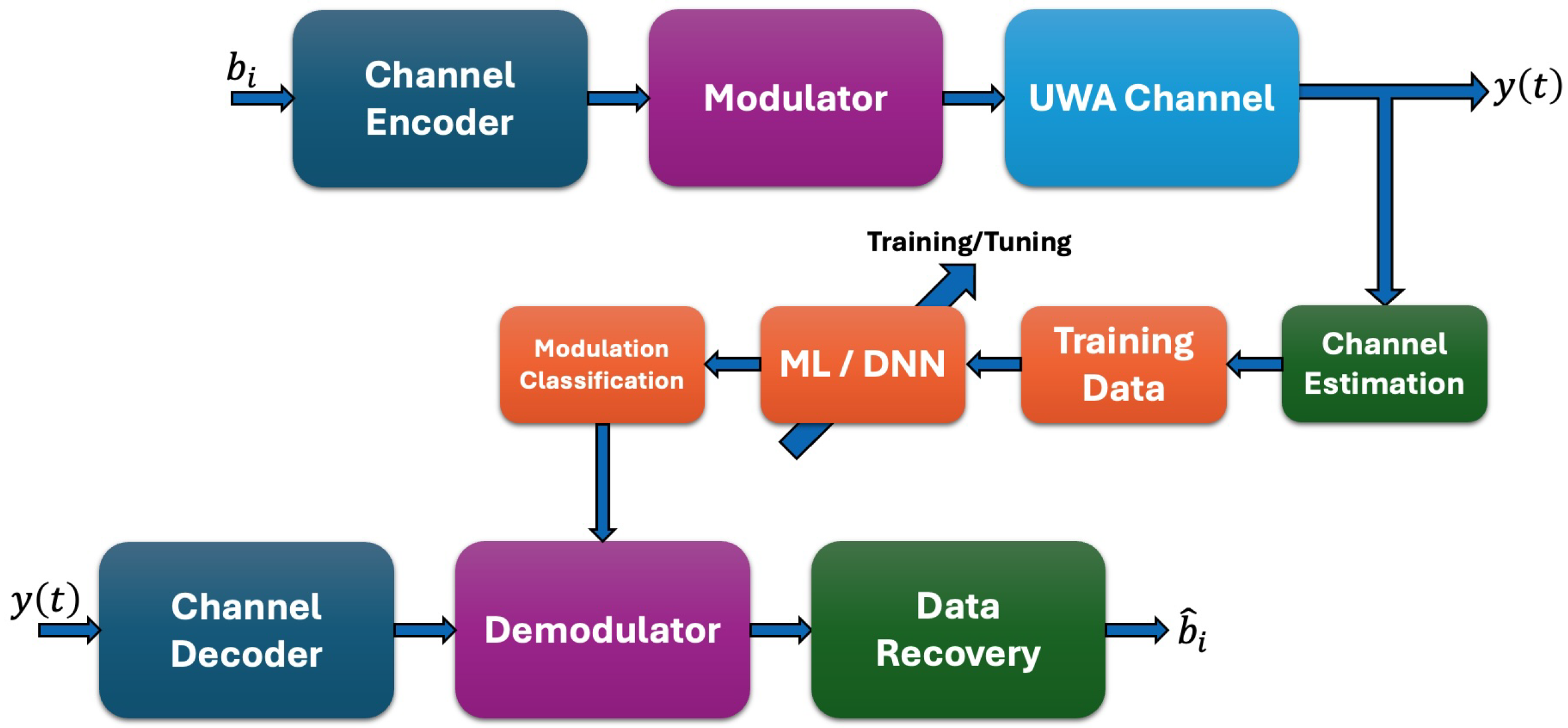
2.1.3. Modulation Recognition
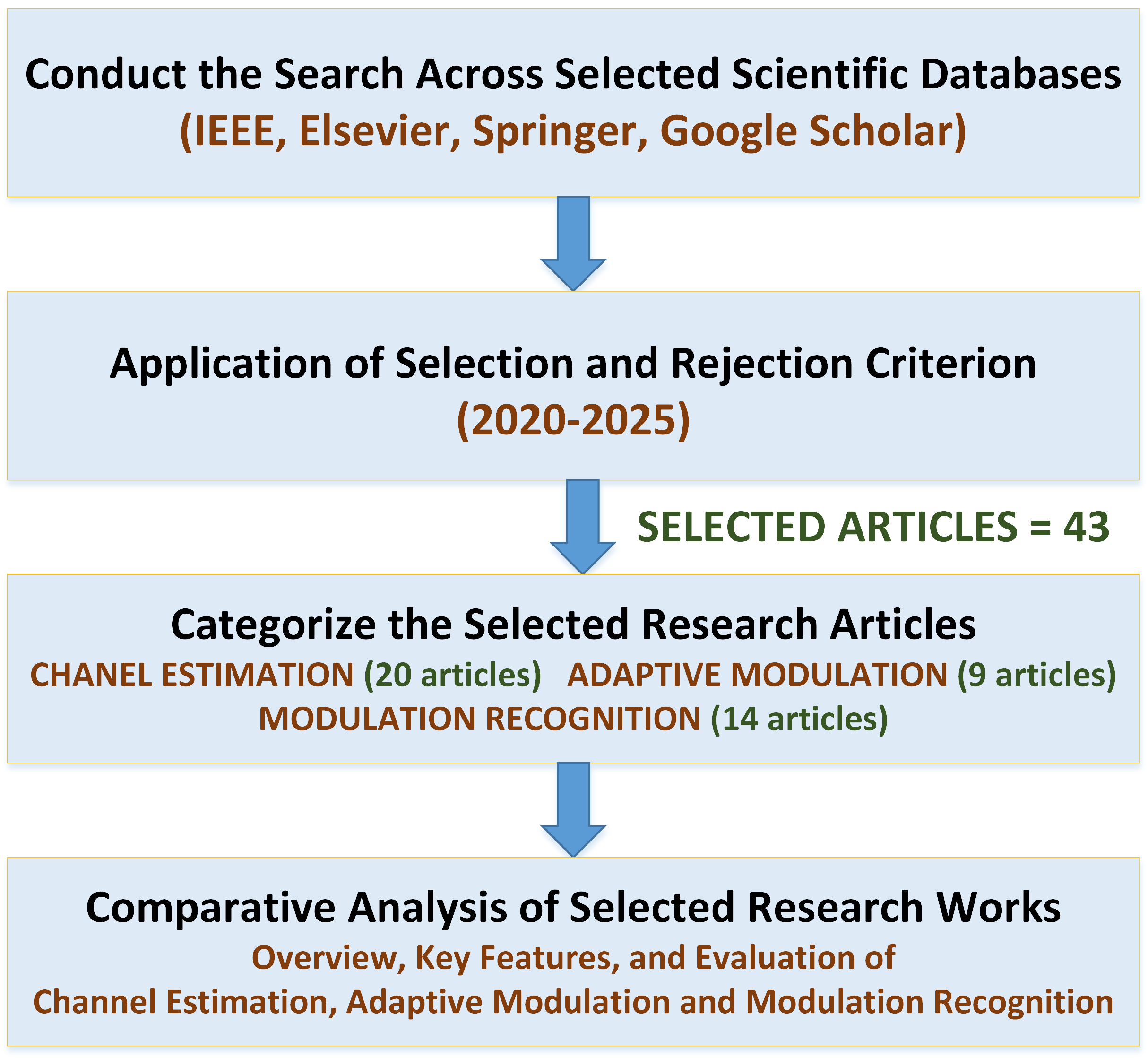
2.2. Development of the Review Protocol
2.2.1. Criteria for Selection and Rejection
- Subject Relevance: Research must be directly relevant to the context of this study.
- Publication Date (2020–2025): Only research published between 2020 and 2025 is included. Studies published before 2020 are excluded.
- Publisher: Selected research must be published in one of the three renowned scientific databases (IEEE, Springer, or Elsevier). To ensure comprehensive coverage, the first 10 pages of Google Scholar were searched for each key term, allowing consideration of articles from other databases.
- Impactful Contributions: Selected research must present key advancements in UWA communication, using ML/DL to enhance channel estimation, adaptive modulation or modulation recognition.
- Results Oriented: Studies with proposals and findings supported by solid evidence, facts, and experimental validation are favored.
- Repetition: Identical or redundant research within the same context is excluded.
2.2.2. Literature Search Process
2.2.3. Systematic Approach Used in Extracting and Analyzing Studies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | ML/DL Technique | Optimizer | Training Examples |
|---|---|---|---|
| [17] | LR | GD | Measured Data |
| [20] | LSTM, BiLSTM, SBULSTM | — | Simulated (BELLHOP) and Measured Data |
| [21] | ABiGRU | Adam | Measured and Simulated |
| [57] | AttLstmPreNet | — | Simulated Data (From [25]) |
| [29] | UACC-GAN | Adam | Measured Data (From [26]) |
| Ref. | ML/DL Technique | Optimizer | Training Examples |
|---|---|---|---|
| [18] | CsiPreNet | Adam | Measured Data |
| [22] | DNN | Adam | Measured Data (From [26]) |
| [58] | DAE and DNN | — | Simulated Data (GBG) |
| [23] | CNN | Adam | Measured and Simulated |
| [24] | 2D BiLSTM | Adam | Measured and Simulated |
| [28] | UDNet | Adam | Measured and Simulated |
| [59] | SC-CNN, AM-BiLSTM | RMSprop | Measured Data (From [26]) |
| [60] | CWGAN-GP, CNN, CAD | — | Simulated Data (From [25]) |
| [27] | BDPCNN | Pelican | Unclear |
| [29] | UACC-GAN | Adam | Measured Data (From [26]) |
| [32] | LSTM and Transformer | Adam | Measured Data |
| [30] | DenseNet | Adam | Measured Data (From [26]) |
| [31] | CNN and LSTM | Adam | Measured Data (From [26]) |
| [33] | DNN | Adam | Simulated Data |
| [34] | S-CNN-ResNet | Adam | Simulated Data |
| Ref | Bandwidth (KHz) | Tx-Rx Distance (km) | Modulation |
|---|---|---|---|
| [17] | 2 | 0.205 | BPSK |
| [20] | 4 | 2 to 3 | BPSK, DS-SS |
| [21] | 14 to 18 | 1 | QPSK |
| [57] | 10 & 5 | 1 | — |
| [29] | 10 to 18 | — | FH-SS |
| Ref | Bandwidth (KHz) | Tx-Rx Distance (km) | System | Subcarr. | Modulation | CP |
|---|---|---|---|---|---|---|
| [18] | 4 | 1 to 5 | OFDMA | 681 | Various | 25 |
| [22] | — | 0.54 to 3.16 | OFDM | 64 | QPSK | 16 |
| [58] | — | — | OFDM | 512 | 16QAM | 64 |
| [23] | — | 0.75, 3 | OFDM | — | QPSK | — |
| [24] | 5 | 1 | OFDM | 462 | — | 22.6 ms |
| [28] | 5 | 1.5, 3 | OFDM | 1024 | Various | 256 |
| [59] | 6 | 0.54, 0.75, 3.16 | OFDM | 512 | BPSK | 128 |
| [60] | 6–10 | 0.75, 1.08 | OFDM | 512 | QPSK | 128 |
| [27] | 1000 | — | MIMO-OFDM | 512 | QPSK | 128 |
| [29] | 10–18 | — | OFDM | 1024 | QPSK | 256 |
| [32] | — | 0.883, 0.967 | OFDM | — | — | — |
| [30] | 32.5–37.5 | 0.8, 1.08, 3.16 | OFDM | 1024 | BPSK, QPSK | 256 |
| [31] | 2 | — | OFDM | 64 | QPSK | 16 |
| [33] | — | — | AFDM | 32, 128 | BPSK, QPSK | 0 |
| [34] | 4 | — | OTFS | — | BPSK | — |
| Ref. | Training Loss | Complexity | Channel Prediction | Gain (BER) |
|---|---|---|---|---|
| [17] | CE | — | 66% Acc., 88% Prec. | — |
| [20] | CE | — | — | |
| [57] | (MAE) | — | 7% better | — |
| [29] | WGAN-GP | — | TVIR, CDF, JS Divergence, Entropy | — |
| Ref. | Training Loss | Complexity | Channel Prediction | Gain (BER) |
|---|---|---|---|---|
| [18] | 0.025 (MAE) | Higher (Big-O, Runtime) | — | |
| [22] | 0.00012 (MSE) | Medium | Near optimal | 40% |
| [58] | 0.1 (L2) | — | — | at an SNR of 20 dB |
| [23] | Combines MSE and BER | 47.8 ms | — | Improvement of over 0.17 |
| [24] | MSE | — | — | (ComNet) |
| [28] | Not Given (MSE) | Same (Time complexity) | dB (NMSE) | (AMP) |
| [59] | (MSE) | MB (Memory), 561,526 (Para.), (FLOPs) | — | (ComNet) |
| [60] | — | — | (MSE) | (ChannelNet) |
| [27] | (MSE) | MB (Memory), 8956 (P), Lower by (FLOPs) | (MSE) | (biLSTM) |
| [29] | WGAN-GP | — | TVIR, CDF, JS Divergence, Entropy | Close to measurements |
| [32] | (MSE) | 8,460,928 (Par.), s (T. Time), ms (P. Time) | (MSE) | Not Done |
| [30] | (MSE) | Lower (CNN) | TVIR | (FC-NN) |
| [31] | MSE | Not Done | Not Done | (ComNet) |
| [33] | MSE | Lower by ms (Runtime) | (NMSE) | (LMMSE) |
| [34] | 0.02 (MSE) | 20.70 MB, 4,996,384 P, F | 3 dB gain at | (CNN-ResNet) |
| Ref. | ML/DL Technique | Optimizer | Training Examples |
|---|---|---|---|
| [43] | SVM, KNN, LDA, BRT | — | Measured Data |
| [36] | MLR, MLP | — | Measured Data |
| [38] | CNN | Adam | Simulated Data |
| [41] | RL | Not Applicable | No Dataset Used |
| [42] | RL | Not Applicable | Measured Data |
| Ref. | ML/DL Technique | Optimizer | Training Examples |
|---|---|---|---|
| [35] | A-kNN | Not Applicable | Measured Data |
| [37] | RL | PPO | Simulated (Bellhop) & Measured Data |
| [38] | CNN | Adam | Simulated Data |
| [39] | RL | Adam | Simulated Data (Bellhop) |
| [40] | CNN | Adam | Measured Data |
| [41] | RL | Not Applicable | No Dataset Used |
| [42] | RL | Not Applicable | Measured Data |
| Ref. | Bandwidth | Tx-Rx Distance | Modulation |
|---|---|---|---|
| [43] | 5 kHz, 10 kHz | 1 km, 2 km, 3 km | PSK, QAM |
| [36] | 4 kHz | 1 km | PSK, QAM |
| [38] | — | — | CDMA, TDMA |
| [41] | — | 5 to 355 cm | FH-BFSK, ASK, PSK |
| [42] | 5 kHz | 0.82 km | FSK, DS-SS |
| Ref. | Bandwidth | Tx-Rx Distance | System | Subcarr. | Modulation | CP |
|---|---|---|---|---|---|---|
| [35] | — | — | OFDM | — | FSK | — |
| [37] | 6 kHz | 5 km | OFDM | 256 | PSK, QAM | 64 |
| [38] | — | — | OFDM | — | — | — |
| [39] | 8 kHz | 5 km | OFDM | 1024 | PSK, QAM | 400 |
| [40] | 6 kHz | 0.3 km to 1.5 km | OTFS | 32 | PSK | — |
| [41] | — | 5 to 355 cm | OFDM | — | — | — |
| [42] | 5 kHz | 0.82 km | OFDM | 200 | — | — |
| Ref. | Training Loss | Complexity | Throughput | Gain in BER |
|---|---|---|---|---|
| [43] | MSE | — | (Acc.) | — |
| [36] | — | — | 25% higher | Comparable |
| [38] | — | — | (Acc.) | Substantial |
| [41] | Not Applicable | — | 3.648% (RSSI) | 32% |
| [42] | TD | — | 14.8% better |
| Ref. | Training Loss | Complexity | Throughput or Equivalent | Gain in BER |
|---|---|---|---|---|
| [35] | Not Applicable | Less | Near ideal | Near ideal |
| [37] | Actor and Critic Loss | — | 4% higher | Better than others |
| [38] | — | — | (Accuracy) | Substantial |
| [39] | Not Given (MSE) | High | Higher than others | Better |
| [40] | CE | Higher | 4% higher | Kept at throughout |
| [41] | Not Applicable | — | 3.648% (RSSI) | 32% |
| [42] | Not Applicable | — | 14.8% higher | Stable |
| Ref. | ML/DL Technique | Optimizer | Training Examples |
|---|---|---|---|
| [49] | SCNet | Adam | Simulated Data |
| [50] | OAE-EEKNN | GD & Adam | Measured Data |
| [51] | RNN & CNN | Adam | Measured Data |
| [52] | SCL | Adam | Simulated and Measured Data |
| [53] | ResNet | Adam | Simulated and Measured Data |
| [54] | CNN with Ensemble Learning | — | Simulated Data |
| [55] | DCN | — | Simulated and Measured Data |
| [56] | SVM | — | Simulated and Measured Data |
| [46] | SqueezeNet and SENet | — | Simulated and Measured Data |
| [47] | Hybrid | Adam | Measured Data |
| [48] | TSTR | Adam | Measured Data (from [26]) |
| [44] | NAS | MSGD | Simulated and Measured Data |
| [9] | 2D ResNet & CNN | — | Measured Data |
| [45] | Hybrid | — | Simulated and Measured Data |
| Ref. | Bandwidth | Tx-Rx Distance | Modulations Considered |
|---|---|---|---|
| [49] | 1000 symbols/s | 1.5 km | PSK, QAM, SSB, FM, PAM, FSK |
| [50] | 10 kHz | 1 km | FSK, PSK, QAM, DSSS, OFDM |
| [51] | 4 kHz | 1 km | PSK, FSK, OFDM |
| [52] | — | 3, 6, 12, 60 m | PSK, FSK |
| [53] | 4 kHz | 1 km | PSK, FSK, OFDM |
| [54] | — | 45 m | PSK, FSK, QAM |
| [55] | — | 3 km, 5 km | PSK, QAM |
| [56] | 100 kHz | 6 m | FSK |
| [46] | — | 10, 500, 1000 m | PSK, FSK, DSSS, OFDM |
| [47] | — | 7 m, 1 km | PSK, FSK, QAM, DSSS, OFDM |
| [48] | — | — | PSK, QAM, FSK |
| [44] | 1 kHz | 100 m to 3 km | LFM, FSK, PSK, DSSS, OFDM |
| [9] | 3 kHz, 10 kHz | 1.22 km | FSK, PSK, CW, DSSS, LFM, OFDM |
| [45] | 31.25 kHz | 5 km, 1.25 km | PSK, QAM |
| Ref. | Training Loss | Complexity | Accuracy | Precision |
|---|---|---|---|---|
| [49] | 0.01 (CCE) | Lower (153,930 P) | 95.3% | 89% to 100% |
| [50] | MSE | Lower (3.48 ms) | 99.25% | — |
| [51] | (CE) | Lower (7.164 ms) | 99.38% | — |
| [52] | Contrastive Loss | — | 98.6% | 66% to 100% |
| [53] | (CE) | — | 100% | 40% to 100% |
| [54] | Negative Log Likelihood | Lower (4.5 ms, P, FLOPs) | 93.4% | 33.33% to 100% |
| [55] | CE | — | 64% to 73% | 58.8% to 100% |
| [56] | 0.10 (Hinge Loss) | Low (SVM efficiency) | 98.28% to 99.78% | 99.90% to 99.94% |
| [46] | — | Lower by 9 times (No. of parameters) | 98.5% | 97% to 99% |
| [47] | Nearly zero (Not Given) | Lower (0.28 M parameters, 7.02 M FLOPs) | 99% | — |
| [48] | CE | Medium (145.9 k parameters) | 86% to 91.1% | 61% to 100% |
| [44] | CE | High (3.10 M P, 0.58 M FLOPs) | 92.2% | 80% to 100% |
| [9] | 0.2 (CE) | High (38.48 M P, 1753 s) | 94.31% | 91.02% |
| [45] | — | Medium (2.23 ms to 8720.94 ms) | 64% to 83% | 61% to 100% |
3. Results on ML/DL-Based Channel Estimation
3.1. Overview of Channel Estimation Approaches
3.2. Key Characteristics of Channel Estimation Techniques
3.3. Comparative Analysis of Channel Estimation Techniques
3.4. Discussion on ML/DL-Based Channel Estimation in SC-UWA Communication Systems
3.5. Discussion on ML/DL-Based Channel Estimation in MC-UWA Communication Systems
4. Results on ML/DL-Based Adaptive Modulation
4.1. Overview of Adaptive Modulation Strategies
4.2. Key Characteristics of Adaptive Modulation Techniques
4.3. Comparative Analysis of Adaptive Modulation Techniques
4.4. Discussion on Adaptive Modulation Techniques in SC-UWA Communication Systems
4.5. Discussion on Adaptive Modulation Techniques in MC-UWA Communication Systems
5. Results on ML/DL-Based Modulation Recognition
5.1. Overview of Modulation Recognition Techniques
5.2. Key Characteristics of Modulation Recognition Techniques
5.3. Performance Comparison of Modulation Recognition Techniques
5.4. Discussion on ML/DL-Based MR Techniques in UWA Communication Systems
6. Challenges and Future Research Directions
6.1. Challenges in ML/DL-Based UWA Communication
- Computational Complexity and Real-Time Processing: ML/DL models such as DenseNet and transformer-based architectures [30,31] demand intensive computational resources during both training and inference phases. This complexity restricts their deployment in underwater environments, particularly on resource-limited autonomous underwater vehicles (AUVs) and mobile nodes. The real-time execution of such models remains problematic due to constraints on onboard memory and processing throughput. Furthermore, GAN-based simulators [29] require expansive datasets and computational power to realistically emulate channel dynamics. These challenges are amplified in scenarios where real-time Doppler compensation is critical for high-speed mobile platforms.
- Limited Training Data and Generalization: Robust ML/DL-based UWA communication models require comprehensive labeled datasets to generalize effectively across diverse environments. However, collecting underwater data is challenging due to fluctuating parameters such as temperature, salinity, and pressure [20,27,45]. These environmental variations often lead to poor generalization across geographic locations and seasonal conditions. Hybrid CNN-RNN models frequently struggle to transfer learned representations reliably. Physics-Informed Neural Networks offer a promising direction by incorporating environmental constraints into learning pipelines [34]. Nevertheless, these models rely on specialized datasets that accurately reflect underwater propagation dynamics, and such datasets remain scarce.
- Multipath Propagation and Doppler Effects: Acoustic signals often encounter severe multipath effects in underwater channels. These reflections cause phase distortion and signal fading [23,45,59]. The rapid movement of AUVs and underwater robots introduces Doppler shifts. These shifts complicate synchronization and modulation decoding. Attention mechanisms and BiLSTM architectures improve temporal adaptation. However, they still struggle with real-time compensation under extreme Doppler conditions. CNN-LSTM models offer better multipath tracking. Yet, they face limitations in maintaining synchronization when channel conditions change rapidly.
- Energy Efficiency and Hardware Constraints: Underwater communication nodes often rely on limited battery power. This makes energy efficiency a top priority [28]. High-complexity models, such as deep CNNs, consume substantial energy. They are not ideal for long-duration missions. Lightweight and pruned models reduce energy demands [47,54]. However, their accuracy may decline due to reduced model capacity. Deploying DRL models on low-power acoustic modems remains challenging. These models require optimization in compression and hardware-aware training. Moreover, resource allocation strategies that balance bandwidth, communication distance, and data rate are underexplored. This area offers important opportunities for future research.
- Fragmentation in Performance Metrics: Performance evaluation in UWA research is highly inconsistent. Different studies report metrics like BER, Accuracy, and MSE. However, they do so under varying conditions. These variations include differences in SNR ranges, acoustic channel models, datasets, and modulation schemes. There is no standard protocol for testing or reporting. As a result, comparing models becomes difficult. A technique may seem better simply due to the evaluation setup, not because it truly performs better. Many studies also lack baseline comparisons with conventional methods. This makes it hard to judge how much ML/DL methods actually improve performance. Without consistency, performance trends across tasks are unclear. It becomes impossible to rank algorithms or choose them for real-world deployment. The absence of unified benchmarks and reporting practices weakens the interpretability of results. It also limits reproducibility and cross-study insights, slowing progress in UWA communications.
- Robustness Challenges in Real-World UWA Environments: Although several ML/DL models report high accuracy and BER reduction, they often perform under constrained experimental conditions. There is limited testing under unknown or changing channel conditions, including variations in Doppler spread, delay, ambient noise, or multipath severity. The absence of robustness testing, especially sensitivity to parameter perturbations, impedes real-world applicability. Furthermore, most studies do not assess generalization across different acoustic platforms or frequency bands, making cross-modem performance unreliable. The lack of domain-shift resilience and scarce labeled datasets further restricts adaptive performance across environments.
- Algorithmic Constraints vs. UWA Deployment Realities: ML/DL models for UWA often demand substantial computation and high-quality training data, but these needs conflict with the strict energy budgets and latency constraints of real deployments—especially battery-powered AUVs and embedded sensors. Many architectures lack support for rapid physical-layer inference like low-latency channel estimation, which is vital for coherent demodulation. Sensitivity to assumptions like fixed Doppler profiles and ideal noise levels further amplifies the Sim2Real gap, as sudden interference or biological noise causes unpredictable degradation. Without optimization for real-time and low-power settings, these models remain difficult to deploy in mutable marine environments.
- Adaptability Limits in Time-Varying UWA Channels: Many reviewed models lack dynamic adaptability when faced with fast time-varying underwater channels. Traditional architectures are often statically trained and underperform as real-world conditions evolve, especially under abrupt changes in Doppler spread or delay characteristics. The absence of real-time update mechanisms—such as online learning, incremental learning, or meta-learning—prevents responsive adaptation, contributing to instability in unpredictable environments. These constraints inhibit timely physical-layer decisions, degrade modulation accuracy, and ultimately affect system reliability.
6.2. Future Research Directions
- Development of Lightweight ML/DL Models [9,38,47]: As underwater communication devices operate in resource-constrained environments, optimizing models for real-time edge computing is crucial. Current architectures such as deep CNNs and RNNs often require extensive computational power, making deployment on low-power underwater sensors challenging.
- –
- Future research should focus on knowledge distillation, a technique that transfers knowledge from larger, complex models to smaller, more efficient models while retaining performance.
- –
- Quantization techniques should be explored to reduce model precision requirements, allowing ML/DL systems to run efficiently on energy-limited platforms.
- –
- Incorporating pruning methods can further reduce computational demands by eliminating redundant parameters in deep learning models.
- Integration of Physics-Informed Neural Networks (PINNs) [33,61]: PINNs combine traditional ML/DL approaches with domain-specific physics principles, enabling more accurate channel estimation and modulation schemes in underwater environments.
- –
- Future hybrid PINN-ML architectures can improve adaptive modulation by integrating wave propagation models into training data, reducing error rates caused by environmental distortions.
- –
- By employing PINNs, AI models can learn underwater acoustic behaviors, compensating for multipath propagation, Doppler effects, and fluctuating water conditions.
- Standardized Evaluation and Visual Benchmarking:
- –
- Future research must prioritize the creation of standardized evaluation platforms. These platforms should include unified protocols for SNR ranges, channel models, and benchmark datasets. Comparative baselines (such as MMSE, and shallow ML models) should also be embedded to provide clear reference points.
- –
- Performance outcomes like BER, complexity, latency, and accuracy should be visualized using box plots, radar charts, and distribution diagrams. This will enable researchers to draw meaningful comparisons and detect outliers or architectural trends more effectively. Such efforts will foster reproducibility, streamline cross-model evaluations, and guide researchers toward truly robust and scalable solutions.
- –
- To enable more intuitive insights and capture comparative strengths, visual aggregation methods such as box plots and radar charts should be considered. These can consolidate accuracy, BER, complexity, and latency across models tested under shared conditions (e.g., same SNR, same dataset), making trends and anomalies readily visible.
- –
- Adaptive modulation techniques allow communication systems to dynamically adjust transmission parameters based on real-time channel conditions.
- –
- RL-based methods such as Q-learning and Deep Q-Networks (DQN) optimize transmission power and modulation schemes to maximize throughput while minimizing BER.
- –
- Meta-learning approaches can further speed up model adaptation, enabling systems to rapidly respond to varying underwater environments without requiring extensive retraining.
- Improved Modulation Recognition Techniques [46,52]: Effective modulation recognition is essential for signal demodulation in UWA communication systems.
- –
- Contrastive learning-based models enhance classification accuracy in low-SNR conditions, distinguishing modulation patterns in noisy underwater environments.
- –
- Hybrid CNN-RNN architectures provide better temporal and spatial feature extraction, improving modulation classification accuracy under extreme multipath interference.
- Expansion to Novel Modulation Schemes [36,53]: Current ML/DL applications largely focus on conventional single-carrier systems and OFDM-based techniques.
- –
- Future research should explore index modulation, which improves spectral efficiency by encoding information in the position of active subcarriers.
- –
- Non-Orthogonal Multiple Access can enhance capacity by allowing multiple users to share the same frequency resource, increasing efficiency in underwater communication.
- –
- Generalized Frequency Division Multiplexing provides flexible subcarrier arrangements that mitigate interference, improving performance in dynamic underwater environments.
- Transfer Learning, Domain Adaptation, and Cross-Platform Resilience: Future research should include structured robustness evaluation frameworks to test model behavior against channel perturbations and unpredictable underwater dynamics. Techniques such as transfer learning and domain adaptation offer promising solutions to improve cross-platform generalization. TL can help reuse pretrained representations in new environments with limited data, while DA adapts models across datasets with different distributions. Benchmarking models across different modem hardware and frequency bands will also be essential for scaling up reliable, AI-enabled underwater acoustic systems.
- Compact Models and Real-Time Strategies: To support edge and federated UWA computing, future work must address model size and execution speed. Compression techniques like pruning, quantization, and distillation help reduce power consumption and memory load [63]. These are vital for low-resource devices in remote underwater environments. For latency-sensitive tasks, streamlined feature sets and efficient computational graphs can minimize delays. FPGA-based processing and AI chips offer real-time capability while conserving energy. Clear complexity-performance trade-offs should guide model selection for embedded use. In federated setups, lightweight models allow distributed training and updates without overwhelming edge devices. Together, these strategies make learning-based systems feasible for scalable and responsive underwater networks.
- Learning-on-the-Fly and Intelligent Resource Allocation: Future UWA systems should explore real-time learning paradigms—including online, incremental, and meta-learning techniques—to enable continuous model refinement during deployment. Moreover, intelligent resource allocation remains underexplored: RL and game-theoretic frameworks offer potential for optimizing spectrum usage, power control, and adaptive modulation/coding under varying bandwidth-distance constraints. Integrating these strategies with channel estimation and feedback loops can lead to joint optimization pipelines that maximize throughput and resilience in complex marine networks.
7. Responses to Formulated Research Questions
7.1. RQ1: How Do ML/DL Techniques Improve Channel Estimation in UWA Communication, and What Are the Key System Characteristics and Performance Metrics of These Methods?
7.2. RQ2: How Do ML/DL Techniques Improve Adaptive Modulation in UWA Communication, and What Are the Key System Characteristics and Performance Metrics of These Methods?
7.3. RQ3: How Effective Are ML/DL-Driven Modulation Recognition Approaches in Identifying Modulation Schemes Under Complex Underwater Conditions, and What Are Their Strengths and Limitations?
7.4. RQ4: What Innovative Approaches and Emerging Trends in Machine/Deep Learning Can Be Employed to Address Unresolved Challenges in Underwater Acoustic Communication, and How Can These Advancements Shape the Future of Intelligent, Efficient, and Scalable UWA Systems?
8. Limitations of Research
- Search Exhaustiveness: We have selected precise search terms and screened results thoroughly. However, some queries returned thousands of articles, making full review difficult. Several studies were excluded based on titles alone, which may have led to missed relevant work. Therefore, this review does not claim complete exhaustiveness.
- Database Selection: This SLR uses four major databases: IEEE, Elsevier, Springer, and Google Scholar. These sources ensure access to high-quality journals. However, some relevant studies from other databases may be missing. This could affect coverage of very recent research. Still, the selected databases offer a strong and representative view of current UWA communication advances.
- Scope of Inclusion Criteria: The inclusion criteria were designed to focus on studies published between 2020 and 2025. While this ensures relevance to recent advancements, older foundational works that may still hold significance were excluded. Future research could incorporate a broader time frame to capture historical developments in machine/deep learning applications for underwater acoustic communication.
- Generalization of Findings: The findings of this SLR are based on selected studies that met predefined criteria. While efforts were made to ensure a balanced representation of methodologies, there is a possibility that certain niche approaches or emerging techniques were underrepresented. Further studies incorporating additional perspectives may enhance the comprehensiveness of future reviews.
9. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Theocharidis, T.; Kavallieratou, E. Underwater communication technologies: A review. Telecommun. Syst. 2025, 88, 54. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Ali, M.F.; Jayakody, D.N.K.; Chursin, Y.A.; Affes, S.; Dmitry, S. Recent advances and future directions on underwater wireless communications. Arch. Comput. Methods Eng. 2020, 27, 1379–1412. [Google Scholar] [CrossRef]
- Huang, L.; Wang, Y.; Zhang, Q.; Han, J.; Tan, W.; Tian, Z. Machine Learning for Underwater Acoustic Communications. IEEE Wirel. Commun. 2022, 29, 102–108. [Google Scholar] [CrossRef]
- Niu, H.; Li, X.; Zhang, Y.; Xu, J. Advances and applications of machine learning in underwater acoustics. Intell. Mar. Technol. Syst. 2023, 1, 8. [Google Scholar] [CrossRef]
- Menaka, D.; Gauni, S.; Manimegalai, C.T.; Kalimuthu, K. Challenges and vision of wireless optical and acoustic communication in underwater environment. Int. J. Commun. Syst. 2022, 35, e5227. [Google Scholar] [CrossRef]
- Zia, M.Y.I.; Poncela, J.; Otero, P. State-of-the-art underwater acoustic communication modems: Classifications, analyses and design challenges. Wirel. Pers. Commun. 2021, 116, 1325–1360. [Google Scholar] [CrossRef]
- Shwetha, M.; Krishnaveni, S. A systematic analysis, outstanding challenges, and future prospects for routing protocols and machine learning algorithms in underwater wireless acoustic sensor networks. J. Interconnect. Netw. 2025, 25, 2330001. [Google Scholar] [CrossRef]
- Wang, B.; Yang, H.; Fang, T. Modulation recognition of underwater acoustic communication signals based on deep learning. EURASIP J. Adv. Signal Process. 2024, 2024, 103. [Google Scholar] [CrossRef]
- Liu, H.; Ma, L.; Wang, Z.; Qiao, G. Channel Prediction for Underwater Acoustic Communication: A Review and Performance Evaluation of Algorithms. Remote Sens. 2024, 16, 1546. [Google Scholar] [CrossRef]
- Li, Z.; Chitre, M.; Stojanovic, M. Underwater acoustic communications. Nat. Rev. Electr. Eng. 2025, 2, 83–95. [Google Scholar] [CrossRef]
- Shaffril, H.A.M.; Samah, A.A.; Samsuddin, S.F. Guidelines for developing a systematic literature review for studies related to climate change adaptation. Environ. Sci. Pollut. Res. 2021, 28, 22265–22277. [Google Scholar] [CrossRef] [PubMed]
- Rashid, M.; Imran, M.; Jafri, A.R.; Al-Somani, T.F. Flexible architectures for cryptographic algorithms—A systematic literature review. J. Circuits Syst. Comput. 2019, 28, 1930003. [Google Scholar] [CrossRef]
- Rashid, M.; Anwar, M.W.; Khan, A.M. Toward the tools selection in model based system engineering for embedded systems—A systematic literature review. J. Syst. Softw. 2015, 106, 150–163. [Google Scholar] [CrossRef]
- Sonbul, O.S.; Rashid, M. Algorithms and techniques for the structural health monitoring of bridges: Systematic literature review. Sensors 2023, 23, 4230. [Google Scholar] [CrossRef] [PubMed]
- Sonbul, O.S.; Rashid, M. Towards the structural health monitoring of bridges using wireless sensor networks: A systematic study. Sensors 2023, 23, 8468. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Yu, W.; Sun, X.; Wan, L.; Tao, Y.; Xu, X. Environment-aware communication channel quality prediction for underwater acoustic transmissions: A machine learning method. Appl. Acoust. 2021, 181, 108128. [Google Scholar] [CrossRef]
- Liu, L.; Cai, L.; Ma, L.; Qiao, G. Channel State Information Prediction for Adaptive Underwater Acoustic Downlink OFDMA System: Deep Neural Networks Based Approach. IEEE Trans. Veh. Technol. 2021, 70, 9063–9076. [Google Scholar] [CrossRef]
- Lee-Leon, A.; Yuen, C.; Herremans, D. Underwater acoustic communication receiver using deep belief network. IEEE Trans. Commun. 2021, 69, 3698–3708. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, Y.; Zhou, F.; Zhao, Y.; Mazhar, S.; Yang, G. Deep learning-based M-ary spread spectrum communication system in shallow water acoustic channel. Appl. Acoust. 2022, 192, 108742. [Google Scholar] [CrossRef]
- Hu, X.; Huo, Y.; Dong, X.; Wu, F.Y.; Huang, A. Channel prediction using adaptive bidirectional GRU for underwater MIMO communications. IEEE Internet Things J. 2023, 11, 3250–3263. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, H.; Li, C.; Chen, X.; Meriaudeau, F. On the performance of deep neural network aided channel estimation for underwater acoustic OFDM communications. Ocean Eng. 2022, 259, 111518. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, C.; Wang, H.; Wang, J.; Yang, F.; Meriaudeau, F. Deep learning aided OFDM receiver for underwater acoustic communications. Appl. Acoust. 2022, 187, 108515. [Google Scholar] [CrossRef]
- Kim, Y.; Lee, H.; Seol, S.; Chung, J. 2D BiLSTM based channel impulse response estimator for improving throughput in underwater sensor network. IEEE Access 2022, 10, 57227–57233. [Google Scholar] [CrossRef]
- Qarabaqi, P.; Stojanovic, M. Statistical characterization and computationally efficient modeling of a class of underwater acoustic communication channels. IEEE J. Ocean Eng. 2013, 38, 701–717. [Google Scholar] [CrossRef]
- van Walree, P.A.; Socheleau, F.X.; Otnes, R.; Jenserud, T. The watermark benchmark for underwater acoustic modulation schemes. IEEE J. Ocean Eng. 2017, 42, 1007–1018. [Google Scholar] [CrossRef]
- Kapileswar, N.; Phani Kumar, P. Optimized deep learning driven signal detection and adaptive channel estimation in underwater acoustic IoT networks. Int. J. Commun. Syst. 2024, 37, e5673. [Google Scholar] [CrossRef]
- Feng, X.; Zhou, M.; Wang, J.; Sun, H.; Pan, G.; Wen, M. Model-driven deep learning-based estimation for underwater acoustic channels with uncertain sparsity. IEEE Trans. Wirel. Commun. 2023, 23, 5710–5725. [Google Scholar] [CrossRef]
- Liu, S.; Yan, H.; Ma, L.; Liu, Y.; Han, X. UACC-GAN: A Stochastic Channel Simulator for Underwater Acoustic Communication. IEEE J. Ocean Eng. 2024, 49, 1605–1621. [Google Scholar] [CrossRef]
- Liu, S.; Adil, M.; Ma, L.; Mazhar, S.; Qiao, G. DenseNet-Based Robust Channel Estimation in OFDM for Improving Underwater Acoustic Communication. IEEE J. Ocean Eng. 2025, 50, 1518–1537. [Google Scholar] [CrossRef]
- Cui, X.; Zhang, C.; Li, J.; Jiang, B.; Li, S.; Liu, J. Deep Learning Model-Driven Channel Estimation and Equalization for Underwater Acoustic OFDM Receivers. Internet Technol. Lett. 2025, 8, e619. [Google Scholar] [CrossRef]
- Tian, T.; Raj, A.; Xavier, B.M.; Zhang, Y.; Wu, F.Y.; Yang, K. A Multi-Task Learning Framework for Underwater Acoustic Channel Prediction: Performance Analysis on Real-World Data. IEEE Trans. Wirel. Commun. 2024, 23, 15930–15944. [Google Scholar] [CrossRef]
- Huang, P.; Li, Q.; Huang, D.; Wang, J. Channel estimation and symbol detection for AFDM over doubly selective fading channels. Phys. Commun. 2025, 69, 102597. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.; Liu, Y.; Shi, L.; Zang, Y. A Deep Learning Receiver for Underwater Acoustic OTFS Communications with Doppler Squint Effect. IEEE Wirel. Commun. Lett. 2025, 14, 1179–1183. [Google Scholar] [CrossRef]
- Huang, L.; Zhang, Q.; Tan, W.; Wang, Y.; Zhang, L.; He, C.; Tian, Z. Adaptive modulation and coding in underwater acoustic communications: A machine learning perspective. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 203. [Google Scholar] [CrossRef]
- Byun, J.; Cho, Y.H.; Im, T.; Ko, H.L.; Shin, K.; Kim, J.; Jo, O. Iterative learning for reliable link adaptation in the Internet of Underwater Things. IEEE Access 2021, 9, 30408–30416. [Google Scholar] [CrossRef]
- Cui, X.; Zhang, Z.; Li, J.; Jiang, B.; Li, S.; Liu, J. Reinforcement learning-based adaptive modulation scheme over underwater acoustic OFDM communication channels. Phys. Commun. 2023, 61, 102207. [Google Scholar] [CrossRef]
- Anitha, D.; Karthika, R. Hybrid deep learning-based adaptive multiple access schemes underwater wireless networks. Intell. Autom. Soft Comput. 2023, 35, 2463–2477. [Google Scholar] [CrossRef]
- Cui, X.; Yan, P.; Li, J.; Li, S.; Liu, J. Deep reinforcement learning-based adaptive modulation for OFDM underwater acoustic communication system. EURASIP J. Adv. Signal Process. 2023, 2023, 1. [Google Scholar] [CrossRef]
- Jing, L.; Dong, C.; He, C.; Shi, W.; Wang, H.; Zhou, Y. Adaptive Modulation and Coding for Underwater Acoustic OTFS Communications Based on Meta-Learning. IEEE Commun. Lett. 2024, 28, 1845–1849. [Google Scholar] [CrossRef]
- Sweta, T.; Ruthrapriya, S.; Sneka, J.; Alex, J.S.R.; Rohith, G.; Das, M. Reinforcement learning-based automated modulation switching algorithm for an enhanced underwater acoustic communication. Results Eng. 2024, 23, 102791. [Google Scholar] [CrossRef]
- Qiu, Y.; Yang, X.; Tong, F.; Chen, D. Evaluation of Reinforcement Learning-Based Adaptive Modulation in Shallow Sea Acoustic Communication. J. Mar. Sci. Appl. 2025, 1–8. [Google Scholar] [CrossRef]
- Alamgir, M.; Sultana, M.N.; Chang, K. Link adaptation on an underwater communications network using machine learning algorithms: Boosted regression tree approach. IEEE Access 2020, 8, 73957–73971. [Google Scholar] [CrossRef]
- Jiang, Z.; Zhang, J.; Wang, T.; Wang, H. Modulation recognition of underwater acoustic communication signals based on neural architecture search. Appl. Acoust. 2024, 225, 110155. [Google Scholar] [CrossRef]
- Yang, X.; Wang, Z.; Shen, T.; Zhao, D. Modulation Classification of Underwater Communication Signals Based on Channel Estimation. J. Mar. Sci. Eng. 2024, 12, 1877. [Google Scholar] [CrossRef]
- Wang, Y.; Shen, T.; Wang, T.; Qiao, G.; Zhou, F. Modulation recognition for underwater acoustic communication based on hybrid neural network and feature fusion. Appl. Acoust. 2024, 225, 110185. [Google Scholar] [CrossRef]
- Wang, J.; Huang, Z.; Shi, W.; Mao, S. One2ThreeNet: An automatic microscale-based modulation recognition method for underwater acoustic communication systems. IEEE Trans. Wirel. Commun. 2024, 23, 10287–10300. [Google Scholar] [CrossRef]
- Li, J.; Jia, Q.; Cui, X.; Gulliver, T.A.; Jiang, B.; Li, S.; Yang, J. Automatic modulation recognition of underwater acoustic signals using a two-stream transformer. IEEE Internet Things J. 2024, 11, 18839–18851. [Google Scholar] [CrossRef]
- Wang, Y.; Jin, Y.; Zhang, H.; Lu, Q.; Cao, C.; Sang, Z.; Sun, M. Underwater communication signal recognition using sequence convolutional network. IEEE Access 2021, 9, 46886–46899. [Google Scholar] [CrossRef]
- Huang, Z.; Li, S.; Yang, X.; Wang, J. OAE-EEKNN: An accurate and efficient automatic modulation recognition method for underwater acoustic signals. IEEE Signal Process. Lett. 2022, 29, 518–522. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, X.; Leng, C.; Wang, J.; Mao, S. Modulation recognition of underwater acoustic signals using deep hybrid neural networks. IEEE Trans. Wirel. Commun. 2022, 21, 5977–5988. [Google Scholar] [CrossRef]
- Gao, D.; Hua, W.; Su, W.; Xu, Z.; Chen, K. Supervised contrastive learning-based modulation classification of underwater acoustic communication. Wirel. Commun. Mob. Comput. 2022, 2022, 3995331. [Google Scholar] [CrossRef]
- Zhang, R.; He, C.; Jing, L.; Zhou, C.; Long, C.; Li, J. A modulation recognition system for underwater acoustic communication signals based on higher-order cumulants and deep learning. J. Mar. Sci. Eng. 2023, 11, 1632. [Google Scholar] [CrossRef]
- Wang, X.; Tu, Y.; Liu, J.; Han, G.; Yu, C.; Cui, J.H. Edge-Enabled Modulation Classification in Internet of Underwater Things Based on Network Pruning and Ensemble Learning. IEEE Internet Things J. 2023, 11, 13608–13621. [Google Scholar] [CrossRef]
- Yao, X.; Yang, H.; Sheng, M. Automatic modulation classification for underwater acoustic communication signals based on deep complex networks. Entropy 2023, 25, 318. [Google Scholar] [CrossRef] [PubMed]
- Guerrero-Chilabert, G.S.; Moreno-Salinas, D.; Sánchez-Moreno, J. Design and Development of an SVM-Powered Underwater Acoustic Modem. J. Mar. Sci. Eng. 2024, 12, 773. [Google Scholar] [CrossRef]
- Zhu, Z.; Tong, F.; Zhou, Y.; Zhang, Z.; Zhang, F. Deep learning prediction of time-varying underwater acoustic channel based on LSTM with attention mechanism. J. Mar. Sci. Appl. 2023, 22, 650–658. [Google Scholar] [CrossRef]
- Li, X.; Han, Z.; Yu, H.; Yan, L.; Han, S. Deep Learning for OFDM Channel Estimation in Impulsive Noise Environments. Wirel. Pers. Commun. 2022, 125, 2947–2964. [Google Scholar] [CrossRef]
- Zhang, Y.; Chang, J.; Liu, Y.; Xing, L.; Shen, X. Deep learning and expert knowledge based underwater acoustic OFDM receiver. Phys. Commun. 2023, 58, 102041. [Google Scholar] [CrossRef]
- Guo, J.; Guo, T.; Li, M.; Wu, T.; Lin, H. Underwater-Acoustic-OFDM Channel Estimation Based on Deep Learning and Data Augmentation. Electronics 2024, 13, 689. [Google Scholar] [CrossRef]
- Wand, M.; Kristoffersen, M.B.; Franzke, A.W.; Schmidhuber, J. Analysis of neural network based proportional myoelectric hand prosthesis control. IEEE Trans. Biomed. Eng. 2022, 69, 2283–2293. [Google Scholar] [CrossRef] [PubMed]
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Arif, M.; Rashid, M. A Literature Review on Model Conversion, Inference, and Learning Strategies in EdgeML with TinyML Deployment. Comput. Mater. Contin. 2025, 83, 13–64. [Google Scholar] [CrossRef]

| Ref. (Year) | Key Contributions | Limitations |
|---|---|---|
| [4] (2022) | Targets adaptive modulation at the physical layer, and provides a taxonomy of ML algorithms while discussing their potential to address UWA challenges. | Does not evaluate ML and DL techniques for channel estimation or modulation recognition, and does not provide performance metrics for adaptive modulation. |
| [4] (2023) | Highlights the potential of ML and DL in addressing dynamic underwater environments, with a focus on adaptive modulation, channel prediction, and demodulation. | Lacks a detailed comparative analysis of ML and DL algorithms, including their system characteristics and performance metrics for key UWA challenges. |
| [5] (2023) | Focuses on source localization, target recognition, and geoacoustic inversion, while providing an evaluation of key techniques, datasets, and ML/DL models. | Lacks emphasis on ML and DL techniques for addressing UWA challenges such as channel estimation, adaptive modulation, and modulation recognition. |
| [10] (2024) | Analyzes UWA channel prediction techniques, categorizing them into linear, kernel-based, and deep learning approaches, with evaluations of performance and complexity. | Lacks investigations and the impact of adaptive modulation and modulation recognition on enhancing the efficiency and reliability of UWA communication. |
| [11] (2025) | Focuses on channel modeling, signal processing techniques, and network protocols, while suggesting future directions like standardized models and data-driven solutions. | Lacks exploration of ML and DL applications for specific UWA challenges, such as channel estimation, adaptive modulation, and modulation recognition. |
| [1] (2025) | Investigates DL techniques for modulation recognition in UWA communication, proposing a hybrid model with multi-scale feature fusion. | Does not explore the other key components such as channel estimation and adaptive modulation. |
| [8] (2025) | Analyzes routing protocols and ML algorithms, highlighting benefits, challenges, future prospects, and providing a detailed taxonomy and performance evaluation. | Does not explore channel estimation, adaptive modulation, and modulation recognition in terms of their key system characteristics and performance metrics. |
| Search Term | IEEE | Elsevier | Springer |
|---|---|---|---|
| Underwater Acoustic | 5189 | 8422 | 6187 |
| Underwater Acoustic Machine Learning | 346 | 1885 | 1264 |
| Underwater Acoustic Deep Learning | 601 | 2001 | 1350 |
| Underwater Acoustic Channel Estimation Machine Learning | 24 | 586 | 296 |
| Underwater Acoustic Channel Estimation Deep Learning | 60 | 649 | 342 |
| Underwater Acoustic Channel Prediction Machine Learning | 23 | 672 | 326 |
| Underwater Acoustic Channel Prediction Deep Learning | 19 | 744 | 363 |
| Underwater Acoustic Receiver Machine Learning | 36 | 526 | 359 |
| Underwater Acoustic Receiver Deep Learning | 55 | 561 | 373 |
| Underwater Acoustic Modulation Classification | 52 | 419 | 299 |
| Underwater Acoustic Modulation Classification | 52 | 419 | 299 |
| Underwater Acoustic Modem Machine Learning | 6 | 107 | 43 |
| Underwater Acoustic Modulation Machine Learning | 42 | 382 | 243 |
| Underwater Acoustic Modulation Deep Learning | 76 | 407 | 276 |
| Underwater Acoustic Modulation Recognition Machine Learning | 16 | 199 | 128 |
| Underwater Acoustic Modulation Recognition Deep Learning | 28 | 222 | 147 |
| Total Articles from Databases | 6983 | 18,882 | 12,396 |
| Sum of All Articles | 38,261 | ||
| Additional Google Scholar Articles | 3000 | ||
| Final Grand Total (All Sources) | 41,261 | ||
| No. | Item | Corresponding Details |
|---|---|---|
| 1 | Citation Data | It includes the title, author(s), publication year, publisher, and research type (journal or conference). |
| 2 | Overview | A concise summary outlining the fundamental proposal and primary objective of the research |
| 3 | Results | Findings obtained from the analyzed research, highlighting key insights and conclusions |
| 4 | Data Collection | Specifies whether the study employs quantitative or qualitative data gathering methods |
| 5 | Assumptions | Identifies any underlying assumptions made to support and validate the research findings |
| 6 | Validation | Describes the methodology used to verify the accuracy and reliability of the proposed study |
| 7 | Channel | Overview: Table 4 and Table 5 |
| Estimation | Characteristics: Table 6 and Table 7 | |
| Techniques | Comparison: Table 8 and Table 9 | |
| 8 | Adaptive | Overview: Table 10 and Table 11 |
| Modulation | Characteristics: Table 12 and Table 13 | |
| Techniques | Comparison: Table 14 and Table 15 | |
| 9 | Modulation | Overview: Table 16, Characteristics: Table 17 |
| Recognition | Comparison: Table 18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tasadduq, I.A.; Rashid, M. Toward Intelligent Underwater Acoustic Systems: Systematic Insights into Channel Estimation and Modulation Methods. Electronics 2025, 14, 2953. https://doi.org/10.3390/electronics14152953
Tasadduq IA, Rashid M. Toward Intelligent Underwater Acoustic Systems: Systematic Insights into Channel Estimation and Modulation Methods. Electronics. 2025; 14(15):2953. https://doi.org/10.3390/electronics14152953
Chicago/Turabian StyleTasadduq, Imran A., and Muhammad Rashid. 2025. "Toward Intelligent Underwater Acoustic Systems: Systematic Insights into Channel Estimation and Modulation Methods" Electronics 14, no. 15: 2953. https://doi.org/10.3390/electronics14152953
APA StyleTasadduq, I. A., & Rashid, M. (2025). Toward Intelligent Underwater Acoustic Systems: Systematic Insights into Channel Estimation and Modulation Methods. Electronics, 14(15), 2953. https://doi.org/10.3390/electronics14152953