


RRT-GPMP2: A Motion Planner for Mobile Robots in Complex Maze Environments


Abstract
1. Introduction
- The RRT-GPMP2 algorithm is proposed to solve the motion planning problem in complex maze environments. Specifically, it effectively combines GPMP2 global planning and RRT local re-planning.
- The proposed RRT-GPMP2 algorithm is thoroughly tested in a series of simulations to validate its performance and practicability.
2. Materials and Methods
2.1. RRT-GPMP2
2.1.1. GPMP2
2.1.2. RRT
- Sample() generates a random point inside the region without static obstacles if the tree structure has not reached the goal point .
- Nearest() performs a comparison between the randomly sampled point and the rest states in the set of nodes V to find the nearest point to .
- Steer() generates a new point , which is closer to by connecting and with a steering function.
- CollisionFree() checks if there is any collision between the straight path from to and the region with static obstacles .
- The new point is added to the set of nodes V and the new edges that connect and are added to the set of edges E.
- The mentioned processes repeat for N times until the tree structure reaches the goal point .

2.1.3. Hierarchical Planning Architecture
- GPMP2 global planning generates a global path that possibly collides with the maze based on the global start point and global goal point.
- Waypoint finder traverses the global path to find the last waypoint before collision as the start point of local re-planning and the first waypoint after collision as the goal point of local re-planning. While executing the traversal algorithm, waypoints with collisions are represented by a value of ’1’, while those without collisions are represented by ’0’, as the maze environment is modelled using a binary map.
- RRT local re-planning generates a collision-free local path based on the local start point and local goal point.
- Waypoint trimmer then removes the collision part of the global path and maintains the collision-free parts on the global path.
- Waypoint integrator merges the collision-free parts on the global path with the local collision-free path.
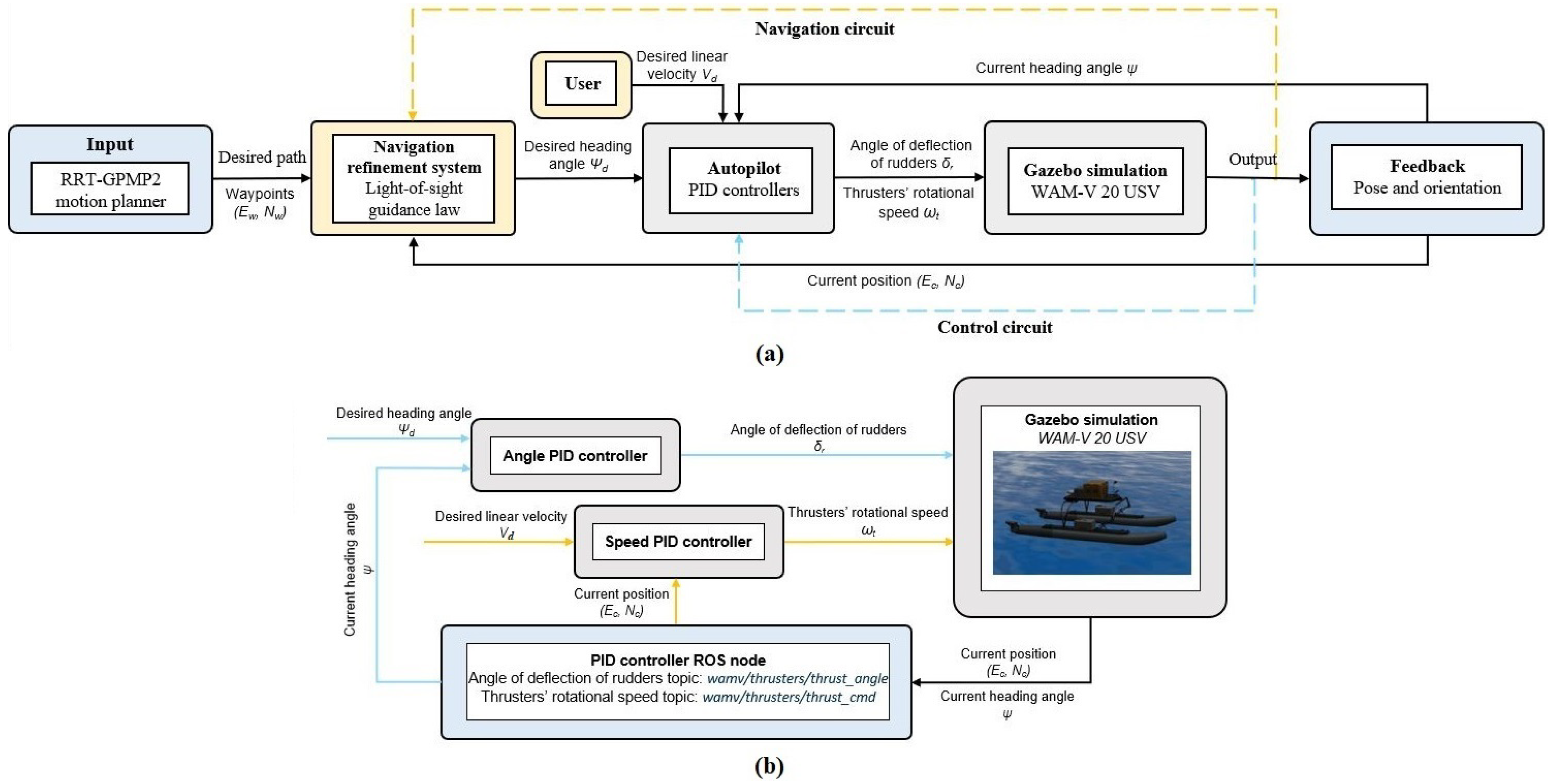
2.2. Fully Autonomous Unmanned Surface Vehicle Navigation Framework

3. Results
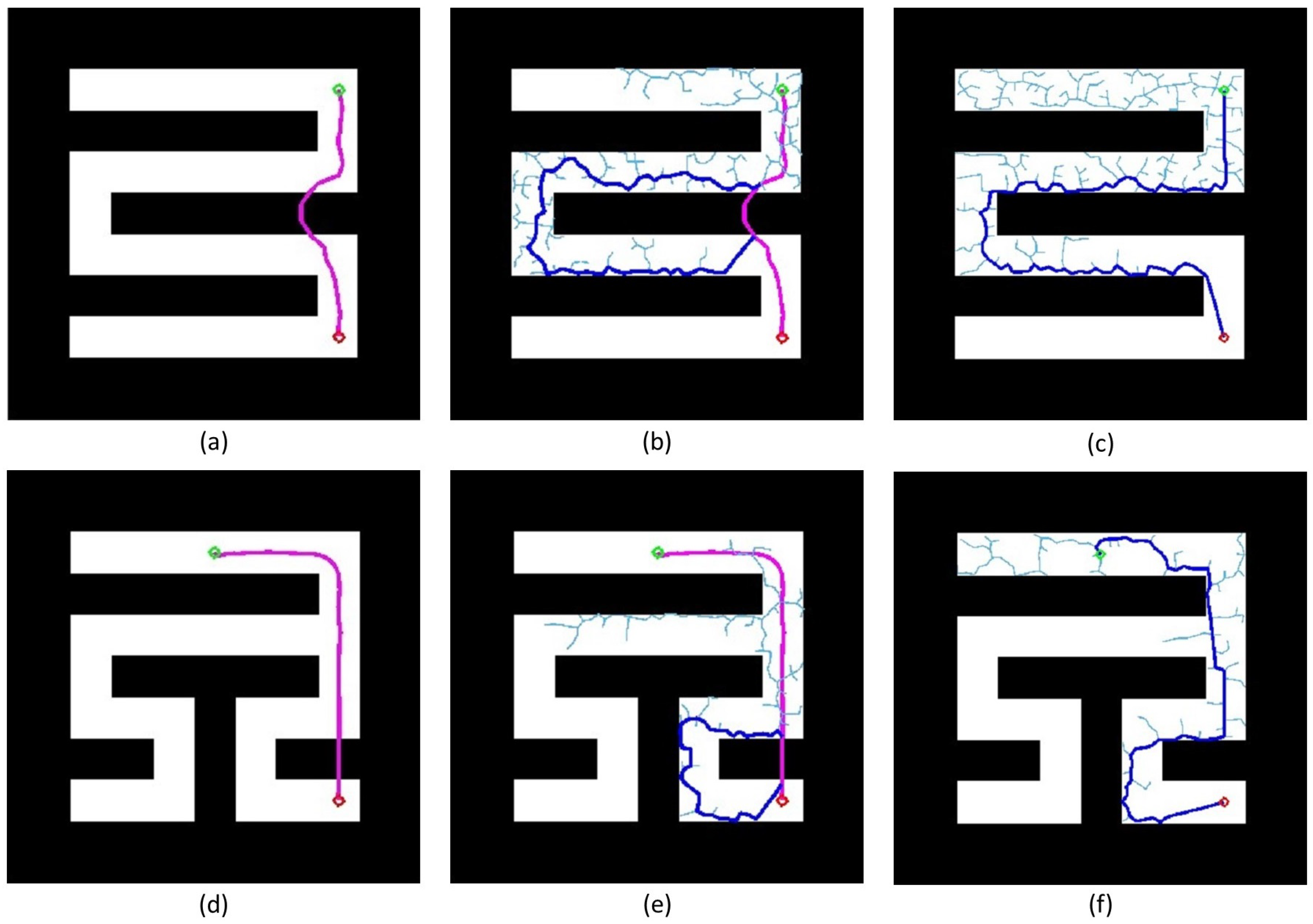
3.1. Results in Self-Constructed Complex Mazes
3.2. Result in a High-Fidelity Maritime Simulation Environment in ROS
4. Discussions
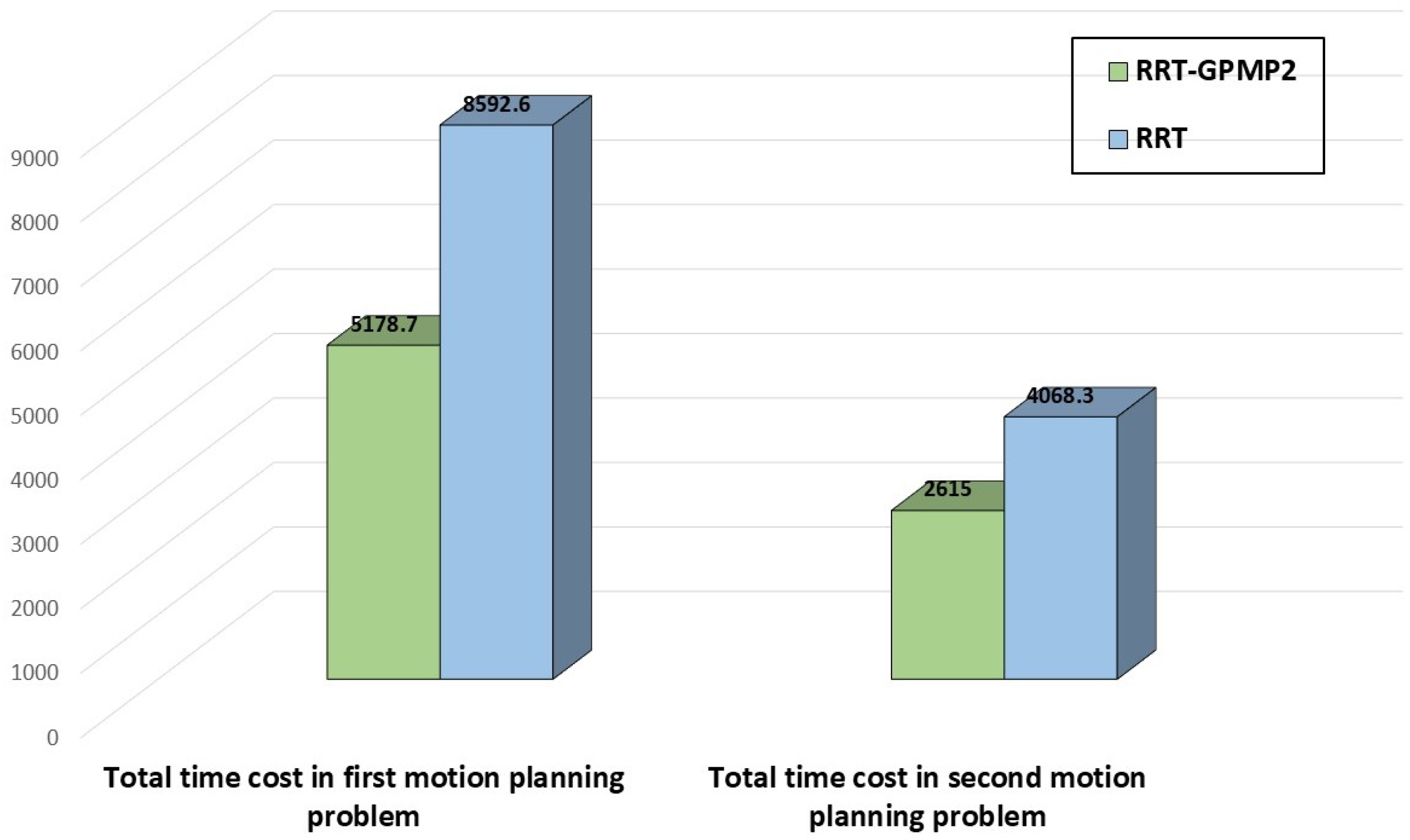
4.1. First Motion Planning Problem in Self-Constructed Complex Maze
4.2. Second Motion Planning Problem in Self-Constructed Complex Maze
4.3. Path-Following Mission in a High-Fidelity Maritime Simulation Environment in ROS
5. Conclusions
6. Future Work
- The proposed RRT-GPMP2 algorithm involves multiple pre-defined parameters. Therefore, advanced learning methods can be employed to determine the optimal parameter configuration.
- The current RRT-GPMP2 implementation is based on a 2D framework, which constrains its applicability in 3D scenarios. It is necessary to expand the potential application scenarios of the proposed RRT-GPMP2 algorithm by implementing it in a 3D framework.
- The proposed RRT-GPMP2 algorithm should be tested on diverse robotic platforms, including aerial and ground robots, in real-world, real-time applications.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kalakrishnan, M.; Chitta, S.; Theodorou, E.; Pastor, P.; Schaal, S. STOMP: Stochastic trajectory optimization for motion planning. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 4569–4574. [Google Scholar]
- Schulman, J.; Duan, Y.; Ho, J.; Lee, A.; Awwal, I.; Bradlow, H.; Pan, J.; Patil, S.; Goldberg, K.; Abbeel, P. Motion planning with sequential convex optimization and convex collision checking. Int. J. Robot. Res. 2014, 33, 1251–1270. [Google Scholar] [CrossRef]
- Zucker, M.; Ratliff, N.; Dragan, A.D.; Pivtoraiko, M.; Klingensmith, M.; Dellin, C.M.; Bagnell, J.A.; Srinivasa, S.S. Chomp: Covariant hamiltonian optimization for motion planning. Int. J. Robot. Res. 2013, 32, 1164–1193. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. In Edsger Wybe Dijkstra: His Life, Work, and Legacy; Association for Computing Machinery: New York, NY, USA, 2022; pp. 287–290. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Meng, J.; Pawar, V.M.; Kay, S.; Li, A. UAV path planning system based on 3D informed RRT* for dynamic obstacle avoidance. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1653–1658. [Google Scholar]
- Gammell, J.D.; Srinivasa, S.S.; Barfoot, T.D. Informed RRT*: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2997–3004. [Google Scholar]
- Mukadam, M.; Yan, X.; Boots, B. Gaussian process motion planning. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 9–15. [Google Scholar]
- Yan, X.; Indelman, V.; Boots, B. Incremental sparse GP regression for continuous-time trajectory estimation and mapping. Robot. Auton. Syst. 2017, 87, 120–132. [Google Scholar] [CrossRef]
- Dong, J.; Mukadam, M.; Dellaert, F.; Boots, B. Motion planning as probabilistic inference using Gaussian processes and factor graphs. In Proceedings of the Robotics: Science and Systems, Ann Arbor, MI, USA, 18–22 June 2016; Volume 12. [Google Scholar]
- Mukadam, M.; Dong, J.; Yan, X.; Dellaert, F.; Boots, B. Continuous-time Gaussian process motion planning via probabilistic inference. Int. J. Robot. Res. 2018, 37, 1319–1340. [Google Scholar] [CrossRef]
- Meng, J.; Liu, Y.; Bucknall, R.; Guo, W.; Ji, Z. Anisotropic GPMP2: A fast continuous-time Gaussian processes based motion planner for unmanned surface vehicles in environments with ocean currents. IEEE Trans. Autom. Sci. Eng. 2022, 19, 3914–3931. [Google Scholar] [CrossRef]
- Meng, J.; Liu, Y.; Bucknall, R. A Fast Continuous-time Motion Planner for USVs in Oceanic Environments. In Proceedings of the 5th IEEE UK and Ireland Robotics and Autonomous Systems Conference, Edinburgh, UK, 23 February 2022. [Google Scholar]
- Dobrevski, M.; Skočaj, D. Dynamic adaptive dynamic window approach. IEEE Trans. Robot. 2024, 40, 3068–3081. [Google Scholar] [CrossRef]
- Chang, L.; Shan, L.; Jiang, C.; Dai, Y. Reinforcement based mobile robot path planning with improved dynamic window approach in unknown environment. Auton. Robot. 2021, 45, 51–76. [Google Scholar] [CrossRef]
- Yasuda, S.; Kumagai, T.; Yoshida, H. Safe and efficient dynamic window approach for differential mobile robots with stochastic dynamics using deterministic sampling. IEEE Robot. Autom. Lett. 2023, 8, 2614–2621. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, Y.; Yu, L.; Zhang, T.; Cheng, Z. A local path planning algorithm based on improved dynamic window approach. J. Intell. Fuzzy Syst. 2023, 45, 4917–4933. [Google Scholar] [CrossRef]
- Meng, J.; Humne, A.; Bucknall, R.; Englot, B.; Liu, Y. A Fully-Autonomous Framework of Unmanned Surface Vehicles in Maritime Environments Using Gaussian Process Motion Planning. IEEE J. Ocean. Eng. 2022, 48, 59–79. [Google Scholar] [CrossRef]
- Petrović, L.; Peršić, J.; Seder, M.; Marković, I. Stochastic optimization for trajectory planning with heteroscedastic Gaussian processes. In Proceedings of the 2019 European Conference on Mobile Robots (ECMR), Prague, Czech Republic, 4–6 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Petrović, L.; Peršić, J.; Seder, M.; Marković, I. Cross-entropy based stochastic optimization of robot trajectories using heteroscedastic continuous-time Gaussian processes. Robot. Auton. Syst. 2020, 133, 103618. [Google Scholar] [CrossRef]
- Aradi, S. Survey of Deep Reinforcement Learning for Motion Planning of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 740–759. [Google Scholar] [CrossRef]
- Bingham, B.; Agüero, C.; McCarrin, M.; Klamo, J.; Malia, J.; Allen, K.; Lum, T.; Rawson, M.; Waqar, R. Toward maritime robotic simulation in gazebo. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–10. [Google Scholar]
- Ocean Power Technologies (WAM-V USV). 2024. Available online: https://oceanpowertechnologies.com/products/unmanned-surface-vehicles/ (accessed on 6 July 2025).
- LaValle, S. Rapidly-exploring random trees: A new tool for path planning. Comput. Sci. Dept. Oct. 1998, 98, 1–4. [Google Scholar]
- LaValle, S.M.; Kuffner, J.J., Jr. Randomized kinodynamic planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Gao, Y.; Meng, J.; Shu, J.; Liu, Y. BIM-based task and motion planning prototype for robotic assembly of COVID-19 hospitalisation light weight structures. Autom. Constr. 2022, 140, 104370. [Google Scholar] [CrossRef] [PubMed]
- Dong, J.; Mukadam, M.; Boots, B.; Dellaert, F. Sparse Gaussian Processes on Matrix Lie Groups: A Unified Framework for Optimizing Continuous-Time Trajectories. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 6497–6504. [Google Scholar]
- Kala, R. Code for Robot Path Planning Using Rapidly-Exploring Random Trees. 2014. Available online: http://www.rkala.in/ (accessed on 6 July 2025).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Measurement | Value |
|---|---|---|
| 1 | GPMP2 global planning time cost | 27.1 [ms] |
| 2 | RRT local re-planning time cost | 5151.6 [ms] |
| RRT-GPMP2 | RRT | |
|---|---|---|
| Total time cost | 5178.7 [ms] | 8592.6 [ms] |
| Path length | 977.5 [m] | 931.1 [m] |
| Number | Measurement | Value |
|---|---|---|
| 1 | GPMP2 global planning time cost | 40.2 [ms] |
| 2 | RRT local re-planning time cost | 2574.8 [ms] |
| RRT-GPMP2 | RRT | |
|---|---|---|
| Total time cost | 2615.0 [ms] | 4068.3 [ms] |
| Path length | 779.9 [m] | 709.6 [m] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, J.; Liu, Y.; Bucknall, R.; Stoyanov, D. RRT-GPMP2: A Motion Planner for Mobile Robots in Complex Maze Environments. Electronics 2025, 14, 2888. https://doi.org/10.3390/electronics14142888
Meng J, Liu Y, Bucknall R, Stoyanov D. RRT-GPMP2: A Motion Planner for Mobile Robots in Complex Maze Environments. Electronics. 2025; 14(14):2888. https://doi.org/10.3390/electronics14142888
Chicago/Turabian StyleMeng, Jiawei, Yuanchang Liu, Richard Bucknall, and Danail Stoyanov. 2025. "RRT-GPMP2: A Motion Planner for Mobile Robots in Complex Maze Environments" Electronics 14, no. 14: 2888. https://doi.org/10.3390/electronics14142888
APA StyleMeng, J., Liu, Y., Bucknall, R., & Stoyanov, D. (2025). RRT-GPMP2: A Motion Planner for Mobile Robots in Complex Maze Environments. Electronics, 14(14), 2888. https://doi.org/10.3390/electronics14142888