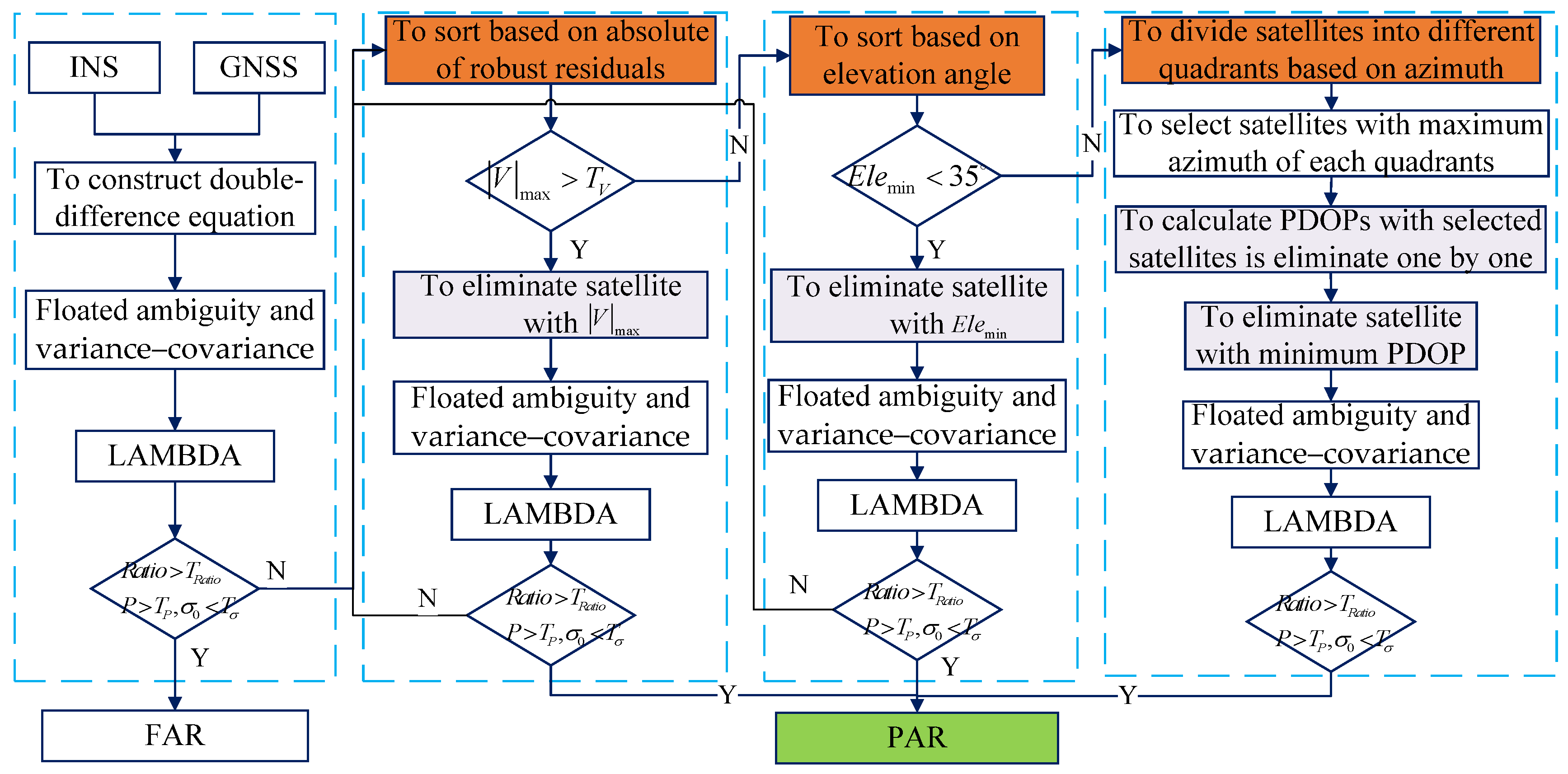
To evaluate the performance of the proposed PAR algorithm, five schemes of the SF GNSS RTK/INS for TC integration were designed, and self-development software was used to resolve these data. Scheme 1 is the FAR. Scheme 2 is the PAR based on the elevation angle (PARE). The satellites are sorted according to the elevation angle, and the satellites are eliminated one by one. Scheme 3 is the PAR based on the posteriori residual and elevation angle, and the posteriori residual is calculated without robust estimation (PARVNE). For scheme 3, the satellites are eliminated one by one if the absolute values of the posteriori residual are over the set threshold; otherwise, the satellites are successively eliminated based on the elevation angle. Scheme 4 is the PAR based on the robust posteriori residual and elevation angle (PARVYE), and the difference between scheme 3 and scheme 4 is that the posteriori residual is calculated using the robust estimation of the IGG-III. Scheme 5 is the proposed PAR based on the robust posteriori residual, elevation angle, and azimuth in the body plane frame (PARVYEO). The smoothing results of the GNSS RTK/INS for TC integration from Inertial Explorer 8.90 (IE) software were used as the reference.
3.1. Case One
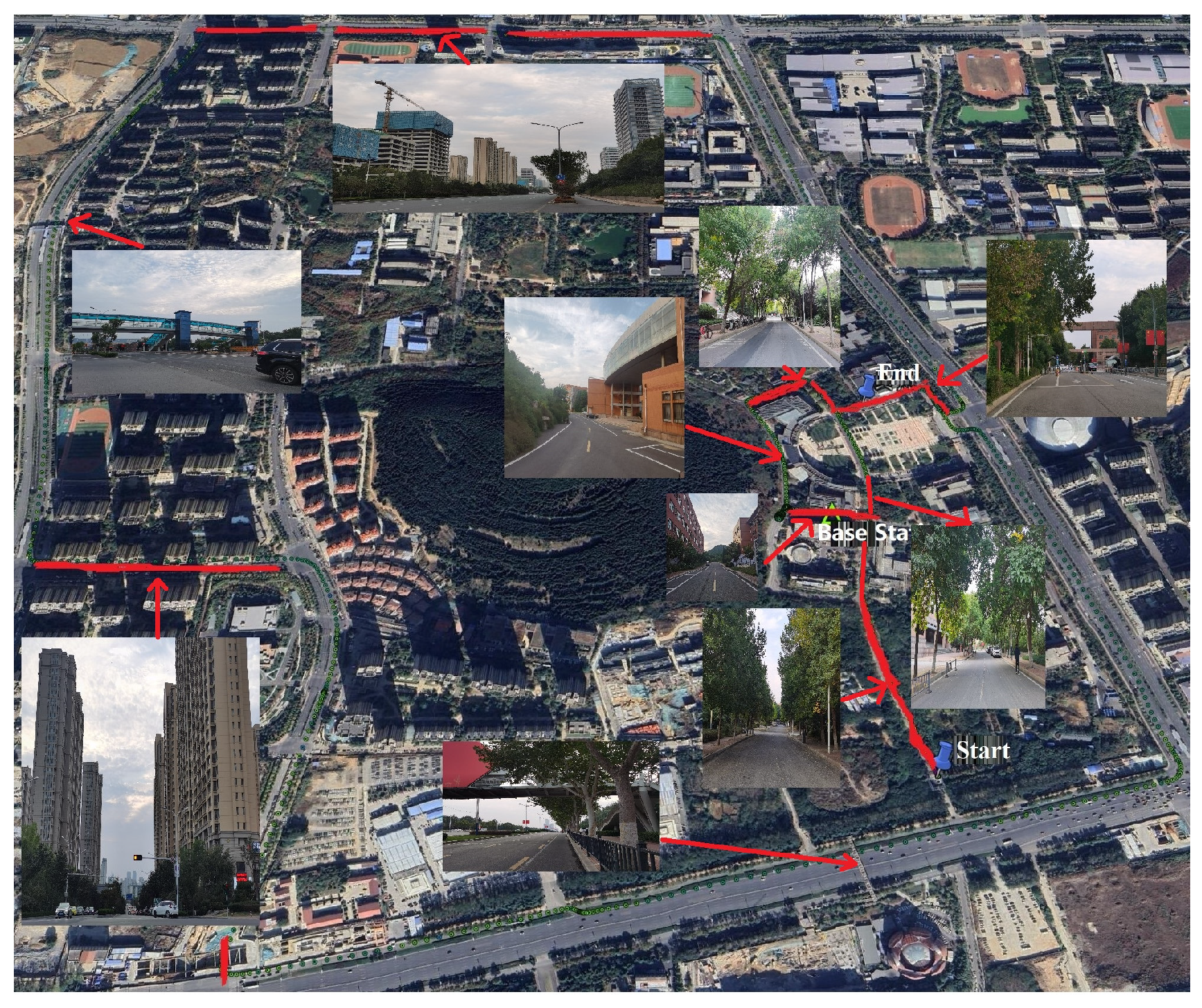
A CHCNAV receiver was set up on a roof as the base station, and the sample frequency was 1 Hz. The receivers on the base and rover stations could receive data from the GPS, BDS2, BDS3, and Galileo satellites. The data were collected in urban areas in Jinan, and GNSS-blocked environments such as tall buildings, dense trees, and viaducts were included in this experiment.
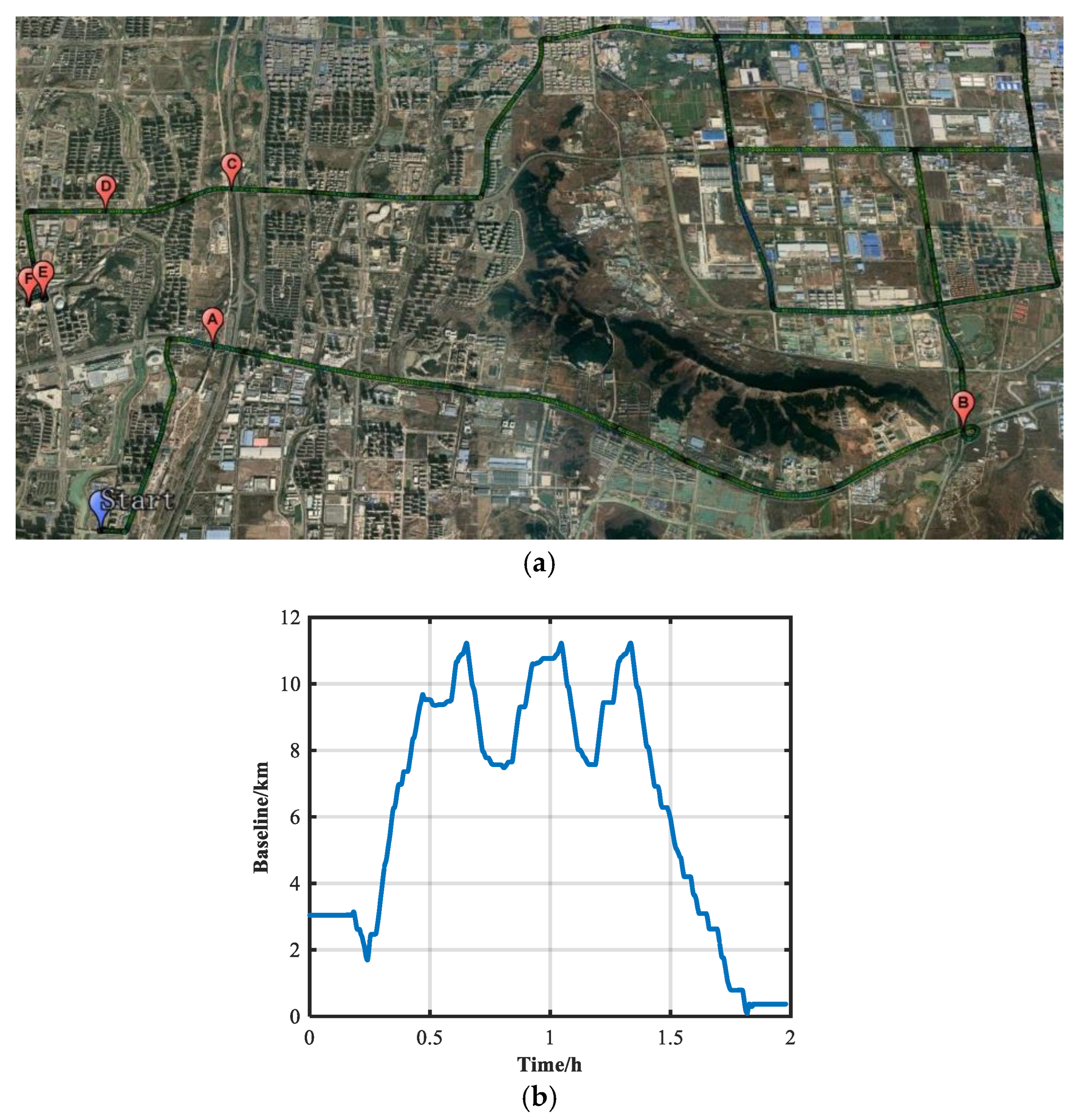
Figure 6 shows the experimental areas and the length of the baseline. In
Figure 6a, the areas marked A, B, C, D, E, and F are the selected GNSS-blocked environments, and the length of the baseline is over 10 km (
Figure 6b).
Figure 7 shows the number of satellites and PDOP in the entire experimental area. In
Figure 7a, the numbers of the GPS (G), BDS (C), and Galileo (E) satellites are greater than six, ten, and two, respectively; however, the number of satellites is much lower in the blocked environments, such as the environments marked in
Figure 6a. In
Figure 7b, the PDOP changes frequently during multiple periods, and the maximum value exceeds six.
The five designed schemes were used to solve this data to evaluate their performance.
Table 1 presents the average number of used satellites and the PDOP for the PARE, PAREVN, PAREVY, and PARVYEO schemes. The statistics of the FAR scheme are not presented because there are too few fixed solutions for this dynamic data. In
Table 1, the proposed algorithm has the largest number of satellites (27.59), and there is 1.67% improvement in the number of satellites compared with the PARE algorithm. The proposed algorithm has the best geometry and the smallest PDOP (1.27), and the PDOP is improved by 9.93% compared to the PARE scheme.
In this study, the ratio of the fixed number of integer ambiguities to the total epoch number was used as the fixed rate of the integer ambiguity.
Table 2 presents the fixed rates of the integer ambiguities and the average numbers of fixed ambiguities for the FAR, PARE, PAREVN, PAREVY, and PARVYEO schemes. In
Table 2, the fixed rate is only 14.05% for the FAR scheme. There are three possible reasons for the low fixed rate of the FAR scheme. First, the threshold of the SNR is set to 25 for data processing, and most of the epochs have low-quality satellites, which affects the fixed performance of the FAR scheme. Second, the predicted position by the INS is used to assist ambiguity resolution, and the error of the predicted position will be gradually accumulated when the INS works alone for a long time, and this large position error will affect the accuracy of the float AR. Third, the baseline is over 10 km at some moments, and the residual atmospheric error has a slight impact on the accuracy of the float AR. The fixed rate increases to 98.92% for the PARE scheme, and the fixed rate increases to 99.20% for PARVEN. When the robust estimation of IGG-III is used, the fixed rate is further improved. The fixed rate is 99.24% for PAREVY, and the fixed rate increases to 99.40% for PARVYEO. Among all of the AR schemes considered in this study, the proposed algorithm has the highest fixed rate. The statistics of the average number of fixed ambiguities for FAR are not presented because the epoch number of the fixed solution is too small. In
Table 2, the average fixed number of integer ambiguities for PARVYEO is 24.61, and it is improved by 1.50%, 0.12%, and 0.61% compared to those of PARE, PAREVN, and PAREVY, respectively.
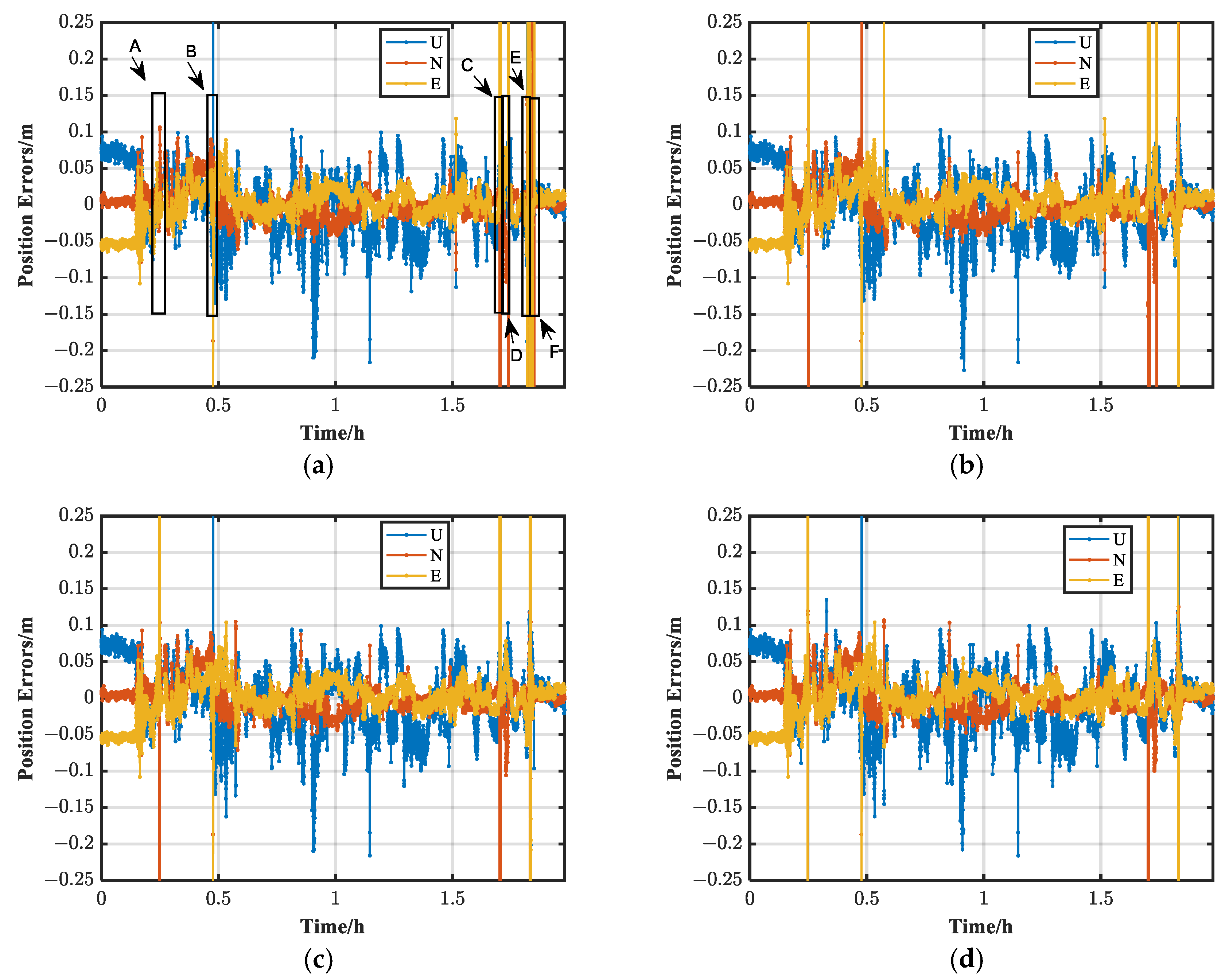
Figure 8 shows the position errors of the PARE, PAREVN, PAREVY, and PARVYEO schemes, and the areas marked A, B, C, D, E, and F in
Figure 8a are the GNSS-blocked areas marked in
Figure 6a. In this paper, only the results of the fixed ambiguity are counted. The positioning performance of FAR is not discussed because the fixed epoch is low. In
Figure 8, the position errors of the PARE, PAREVN, PAREVY, and PARVYEO schemes are mostly at the centimeter level, and large errors exist at some timepoints. In
Figure 8a, PARE does not have large errors in area A compared with the other PAR schemes. This is because area A is the scene of continuous viaducts, and the PARE scheme has more gap epochs than the other PAR schemes. In area A, the fixed rate is improved when PAREVN, PAREVY, and PARVYEO are used; however, the integer ambiguities are incorrectly fixed at some epochs. In areas B and C, the scenes are of a vertical transportation hub and viaduct, and all the PAR methods have large errors. In area D, which contains trees and buildings, there are large position biases for PARE and PAREVN, and the position results are significantly improved by PAREVY and PARVYEO. In area E, which contains the porch, dense trees, and tall buildings, the position results of PARE have continuous meter-level errors, and the other PAR schemes quickly converge to a centimeter-level positioning accuracy. In area F, which is the scene of a tall corridor, the position results of PARE have large errors, while the position results of the other PAR schemes are still at the centimeter level.
Table 3 is the RMS (Root Mean Square) statistics of the position errors for the designed PAR schemes shown in
Figure 8. The positioning accuracies of these designed PAR schemes are on the decimeter level or meter level due to the influence of complex GNSS-blocked environments. In
Table 3, the 3D RMS of the PARE scheme is 1.95 m, and the positioning accuracy is the lowest among all the designed PAR schemes. The RMSs of the PARVNE and PARVYE schemes are basically the same and outperform that of the PAR scheme. The RMS of the PARVYEO scheme is optimal, reaching 0.48 m. Compared with the PARE, PARVNE, and PARVYE schemes, the 3D RMS of the proposed scheme is improved by 75.49%, 12.09%, and 15.19%.
Figure 9 presents the cumulative probabilities of the 3D position error for the FAR, PARE, PAREVN, PAREVY, and PARVYEO schemes. In
Figure 9, the cumulative probability of the 3D position error within 0.10 m is only 13.74% for the FAR scheme because of the low fixed rate of the integer ambiguities, and the cumulative probability is significantly increased to 95.34% by PARE. The cumulative probability of the 3D position error within 0.10 m reaches 96.43% for PAREVY, and the cumulative probability is the highest for the proposed PARVYEO algorithm (96.62%). The probability that the 3D position error is over 0.2 m is 0.88%, 0.75%, and 0.38% for the PARE, PARVNE, and PARVYE schemes, and it is only 0.31% for the proposed algorithm.
Table 4 shows the computation time of the designed PAR schemes, and the epoch numbers are 7124 for this data. In
Table 4, the computation time is 146.575 s for the PARE scheme, and the computation time increases to 148.920 s and 151.626 s for the PARVNE and PARVYE schemes. Because the robust posterior residual, the elevation angle, and the azimuth in the body frame are used for the proposed scheme, the computation cost is the highest, reaching 152.549 s. Compared with the PARE scheme, the computation time is slightly increased by 4.08%. The average computation time of the proposed PAR scheme is 0.021 s for each epoch. Therefore, the proposed scheme still has great computational efficiency and can meet the requirements of real-time application in urban environments.
To evaluate the performance of the proposed algorithm in GNSS-blocked urban environments, the positioning performance of several PAR schemes in the six areas marked in
Figure 6 is analyzed.
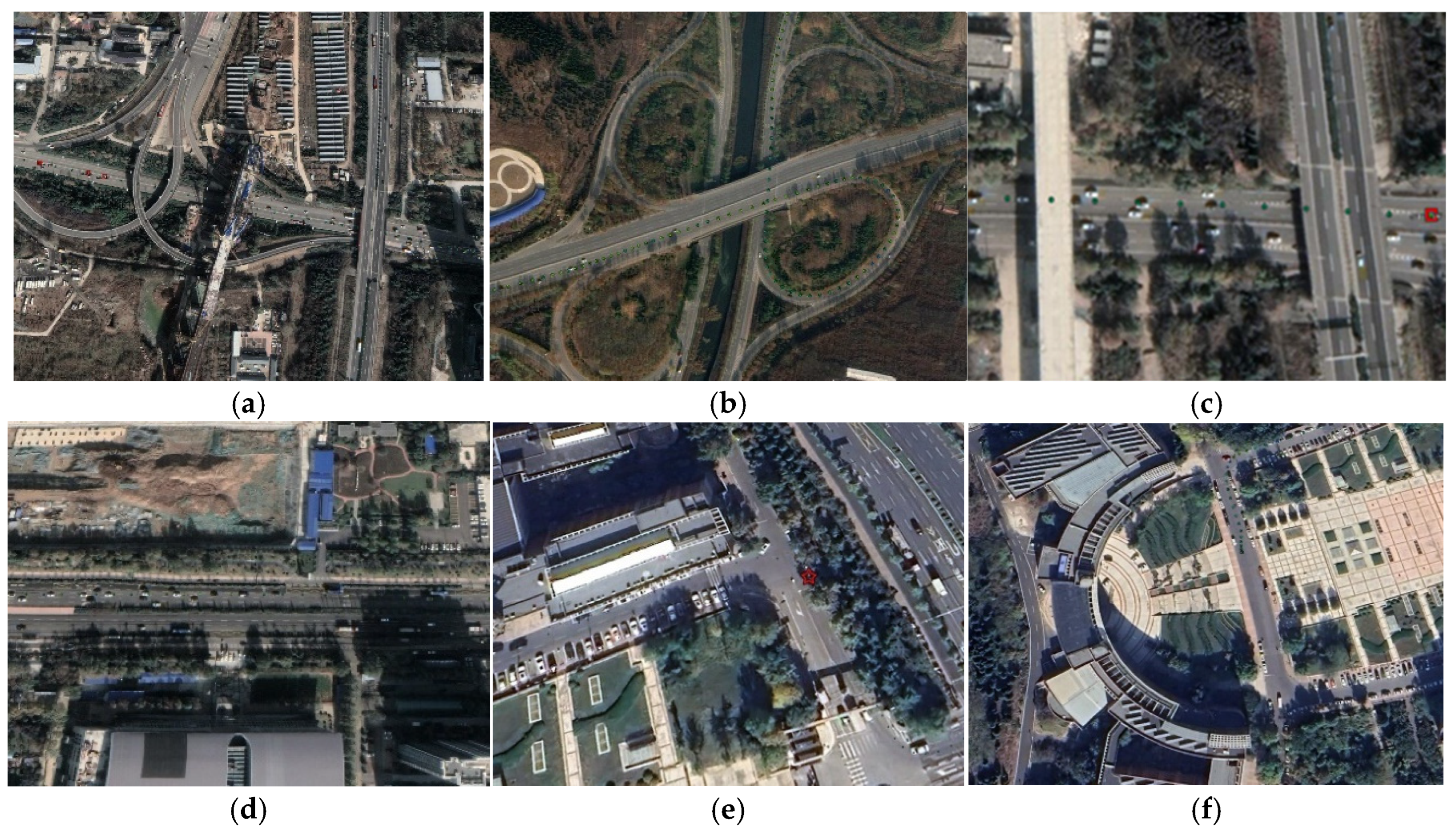
Figure 10 shows the environments of the six marked areas.
Figure 10a shows a mixed shielded environment, including a vertical transportation hub and two viaducts.
Figure 10b shows a vertical transportation hub.
Figure 10c shows the environment with two continuous viaducts.
Figure 10d shows an environment with dense trees and tall buildings along the path.
Figure 10e shows a continuous shielded environment containing a porch, a tree-lined road, and a tall building.
Figure 10f shows an environment with tall buildings.
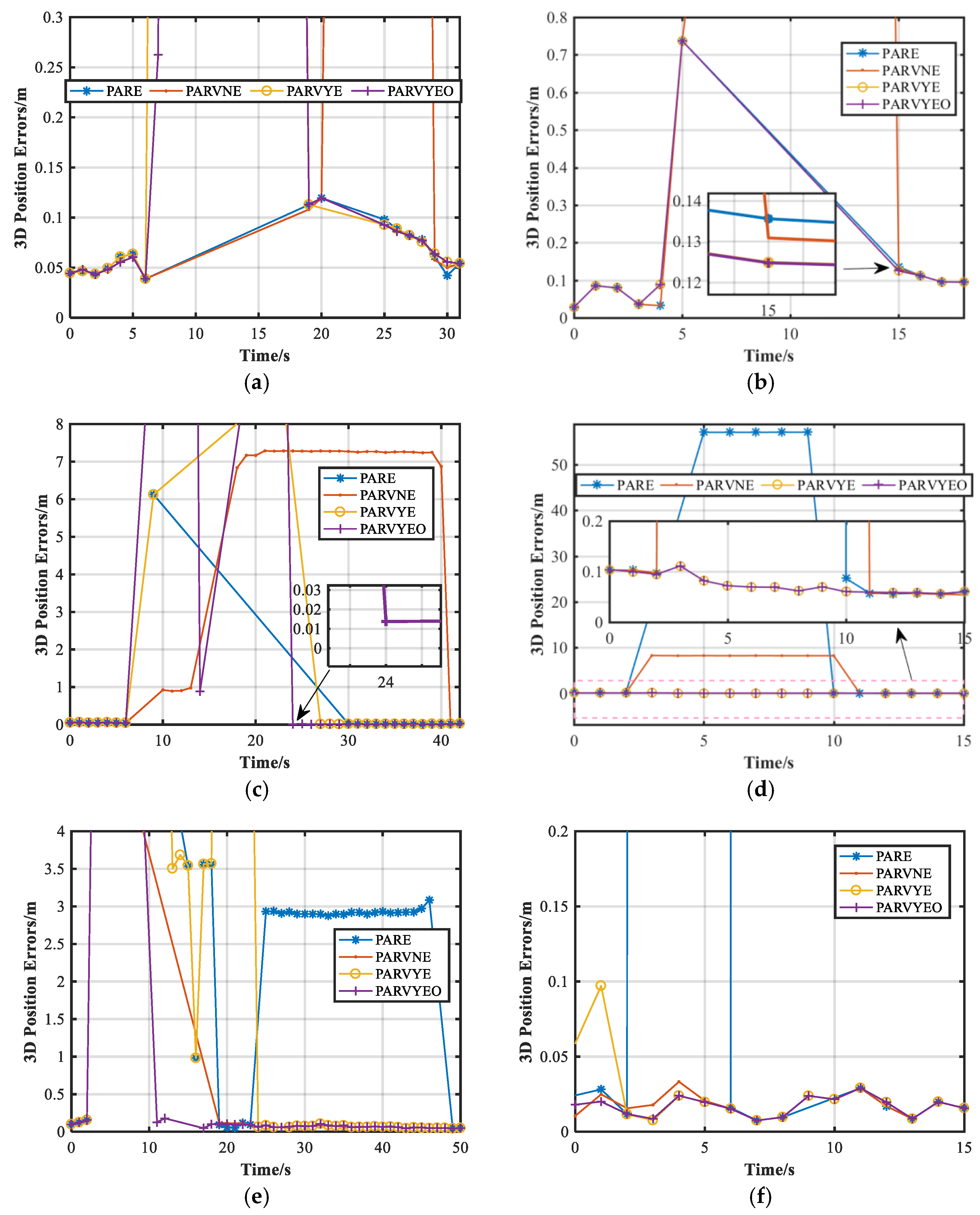
Figure 11 presents the position errors of the designed PAR schemes in the six marked areas. In
Figure 11a, the ambiguities of several PAR schemes cannot be fixed for some time because of the serious GNSS blocking in this environment, and the epoch numbers of unfixed ambiguity for PARE, PARVNE, PARVYE, and PARVYEO are 16, 18, 16, and 10, respectively. The fixed rate of the proposed scheme in this GNSS-blocked environment is better than that of other PAR schemes. Although there are some epochs where ambiguities are incorrectly fixed for the PARVNE, PARVYE, and PARVYEO schemes, the position accuracy of the proposed scheme quickly converges to the centimeter level when the GNSS-blocked environment is passed. However, the centimeter-level positioning results can be obtained up until 29 s for the PARVNE scheme. In
Figure 11b, the PARE, PARVNE, PARVYE, and PARVYEO schemes have decimeter-level positioning errors in the fifth second, which is because only four pairs of satellites are available in this epoch when the vehicle enters the vertical transportation hub. In this GNSS attenuation area, the epoch numbers of the unfixed ambiguities for the PARE, PARVNE, PARVYE, and PARVYEO schemes are 9, 8, 9, and 9, respectively. The PARVNE scheme has meter-level positioning errors when the vehicle exits the vertical transportation hub; however, the position accuracies of the PARVYE and PARVYEO schemes, which use the IGG-III, quickly converge to the centimeter level. In
Figure 11c, the position errors of the designed PAR schemes are at the meter level when the vehicle enters the viaduct environment, and there are some epochs where the fixed solution of the integer ambiguity cannot be obtained. The epoch numbers of unfixed ambiguity for the PARE, PARVNE, PARVYE, and PARVYEO schemes are 22, 7, 16, and 11, respectively. In area C, the PARVNE scheme has the best fixed rate of integer ambiguity, followed by the proposed scheme. However, there are many epochs where the ambiguity is incorrectly fixed for the PARVNE scheme, and the centimeter-level positioning results can be obtained until the 41st second. The corrected integer ambiguity and centimeter-level solution can be obtained most quickly for the proposed algorithm when the vehicle passes the viaduct environment. In
Figure 11d, the maximum position error of the PARE scheme reaches tens of meters, and the maximum position error is decreased to the meter level by the PARVNE scheme. The PARVYE and PARVYEO schemes can resist the influence of gross errors, and their position errors are at the centimeter level. In
Figure 11e, the position errors of these PAR schemes reach the meter level due to the presence of the continuous complex environments shown in
Figure 10e, and the epoch numbers of unfixed ambiguity for the PARE, PARVNE, PARVYE, and PARVYEO schemes are 6, 12, 5, and 5, respectively. The meter-level position error of the PARE scheme starts from the third second to the eighteenth second where there are porch and dense tree environments during this time. The meter-level position error also occurs for 22 s after the vehicle enters the tall building environment. For the PARVNE scheme, the centimeter-level position results can be obtained at the nineteenth second when the porch and dense tree environment are passed. For the PARVYE scheme, the meter-level position errors start at 3 s, and the centimeter-level position results can be obtained up until 25 s. However, the proposed algorithm can obtain the centimeter-level position results in the eleventh second. Therefore, the proposed algorithm has the fastest performance to converge to the centimeter-level position result among all the designed PAR schemes in this GNSS-blocked area. In
Figure 11f, the position errors are tens of meters for the PARE scheme due to the obstruction of tall buildings, and the other PAR schemes can resist the influence of the gross error. In summary, the centimeter-level position results can be obtained most quickly by the proposed scheme compared to other PAR schemes in complex GNSS-blocked environments.
In these six areas of complex GNSS-blocked environments, the total epoch number is 177, and the epoch numbers of ambiguity fixing for the PARE, PARVNE, PARVYE, and PARVYEO schemes are 118, 131, 129, and 140. The fixed rates of the PARE, PARVNE, PARVYE, and PARVYEO schemes are 66.67%, 74.01%, 72.88%, and 79.10%, and the fixed rate of the proposed scheme is improved by 18.64%, 6.87%, and 8.53% compared to the PARE, PARVNE, and PARVYE schemes. The probability of the 3D position error within 0.10 m is 36.72%, 42.94%, and 55.32% for the PARE, PARVNE, and PARVYE schemes, which is improved to 60.45% by the proposed scheme.
Table 5 shows the statistics of the position errors for the PARE, PAREVN, PAREVY, and PARVYEO schemes in the above six areas. In
Table 5, the proposed algorithm has the lowest average median and mean values of the 3D position errors, i.e., 0.059 m and 1.02 m, respectively. Compared with the PARE, PAREVN, and PAREVY schemes, the average value of the 3D median position errors of the proposed algorithm is improved by 89.05%, 96.98%, and 0.68%, respectively, and the average value of the 3D mean position error of the proposed algorithm is improved by 81.62%, 44.90%, and 55.13%, respectively. The RMSs of the PARE, PARVNE, PARVYE, and PARVYEO schemes are 11.81 m, 3.96 m, 4.13 m, and 3.37 m, respectively, and the proposed scheme has the highest positioning accuracy. Compared with other PAR schemes, the RMS of the 3D position error of the proposed scheme is improved by 71.56%, 14.88%, and 22.48%, respectively.
Therefore, the positioning performance of the proposed scheme is better than that of the other PAR schemes in complex GNSS-blocked areas, and the fixed rate of integer ambiguities is optimal among all the designed PAR schemes. The proposed algorithm also has the fastest performance to converge to the centimeter-level position result among all designed PAR schemes after the vehicle enters the GNSS-blocked environments.
In all the epochs of areas E and F, the common satellite is present for these designed PAR schemes, and there are no continuous common satellites for the designed PAR schemes in areas A, B, C, and D. Therefore, area E and area F are used as an example to analyze the AR performance of these designed PAR schemes.
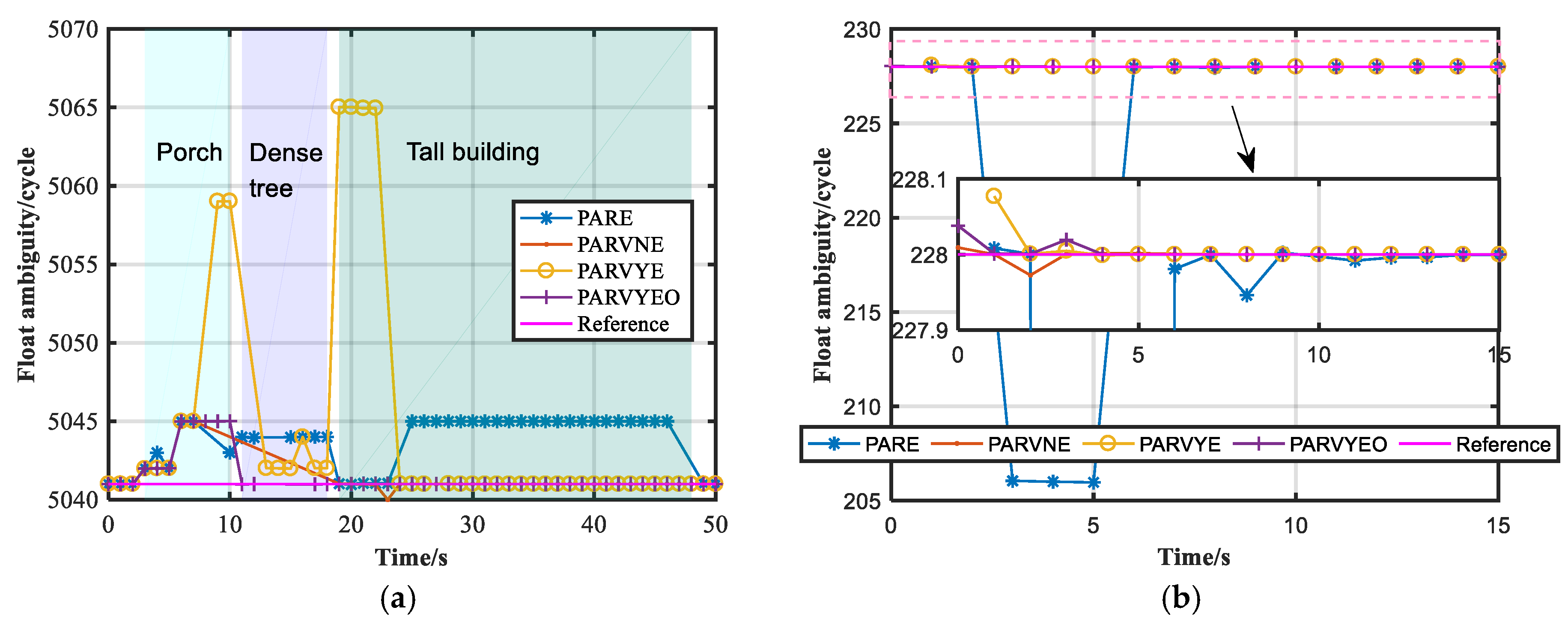
Figure 12 shows the float ambiguity of the common satellite for these designed PAR schemes in areas E and F, and the pink line is the integer ambiguity reference.
Figure 12a is the float ambiguity of common satellite G15 in area E. In
Figure 12a, the shaded areas represent the area sheltered by the porch, dense trees, and tall buildings. The float ambiguity has a large bias for several PAR schemes after the vehicle enters the porch area in the third second, and the position results also have a large bias for every PAR scheme (
Figure 11e). The PARE scheme is seriously affected by the gross errors, and the float ambiguity has a large bias in the GNSS-blocked areas of the porch and dense trees. In the tall building areas, the float ambiguity has a continuous bias that starts at 25 s, and the high-accuracy float ambiguity is obtained up until 49 s. For the PAREVN scheme, the data gap occurs after the seventh second, and the high-accuracy float ambiguity is solved at 19 s. The large bias of the PARVYE scheme starts at the third second, and the high-accuracy float ambiguity is solved at 24 s. For the proposed algorithm, when the vehicle passes the porch environment, the reliable float ambiguity is obtained at 11 s. The data gap occurs after the thirteenth second during passage through the environment of dense trees, and the high-accuracy float ambiguity is obtained when the vehicle passes the environment of dense trees at the eighteenth second for the proposed scheme. Therefore, the proposed algorithm can most quickly obtain the high-accuracy float ambiguity in the multiple GNSS-blocked environments.
Figure 12b is the float ambiguity of common satellite G05 in area F, and the area is sheltered by tall buildings. In
Figure 12b, the float ambiguity has a large bias that is about 22 cycles for the PARE scheme from the third second to the fifth second, and the continuous high-accuracy float ambiguity can be obtained for the PAVNE, PARVYE, and PARVYEO schemes. In the single GNSS-blocked environment of tall buildings, the proposed algorithm can obtain a stable and high-accuracy float ambiguity.
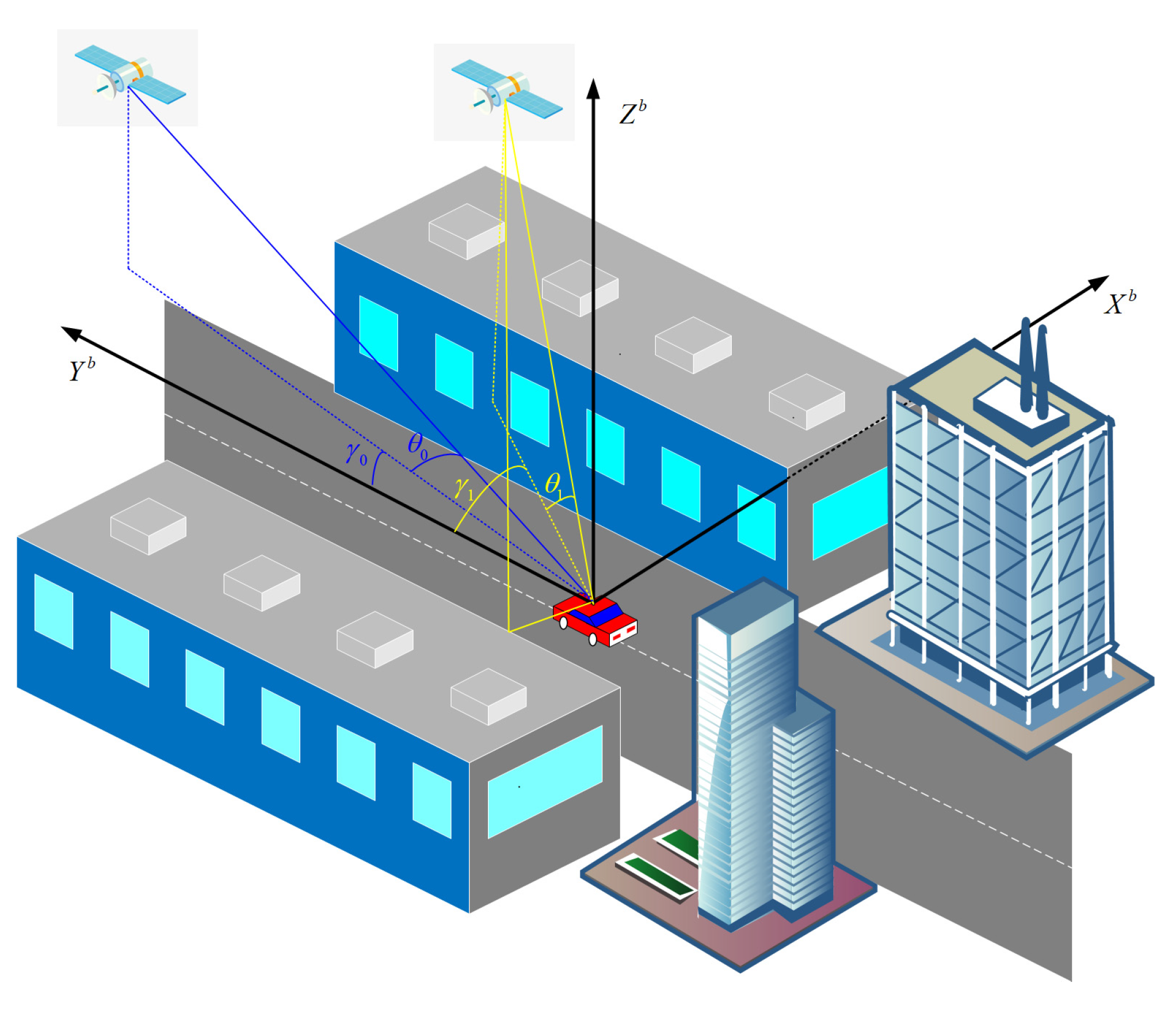
Figure 13 shows the sky plot of the satellites in the body frame for the seventeenth second shown in
Figure 12a. At this time, the vehicle reaches the position of the red pentagram in
Figure 10e, and only the proposed PAR algorithm can fix the ambiguities. In
Figure 13, F, B, L, and R denote the forward, backward, left, and right directions of the road, respectively. In
Figure 13a, there are fewer visual satellites on the two sides of the road, and as can be seen from
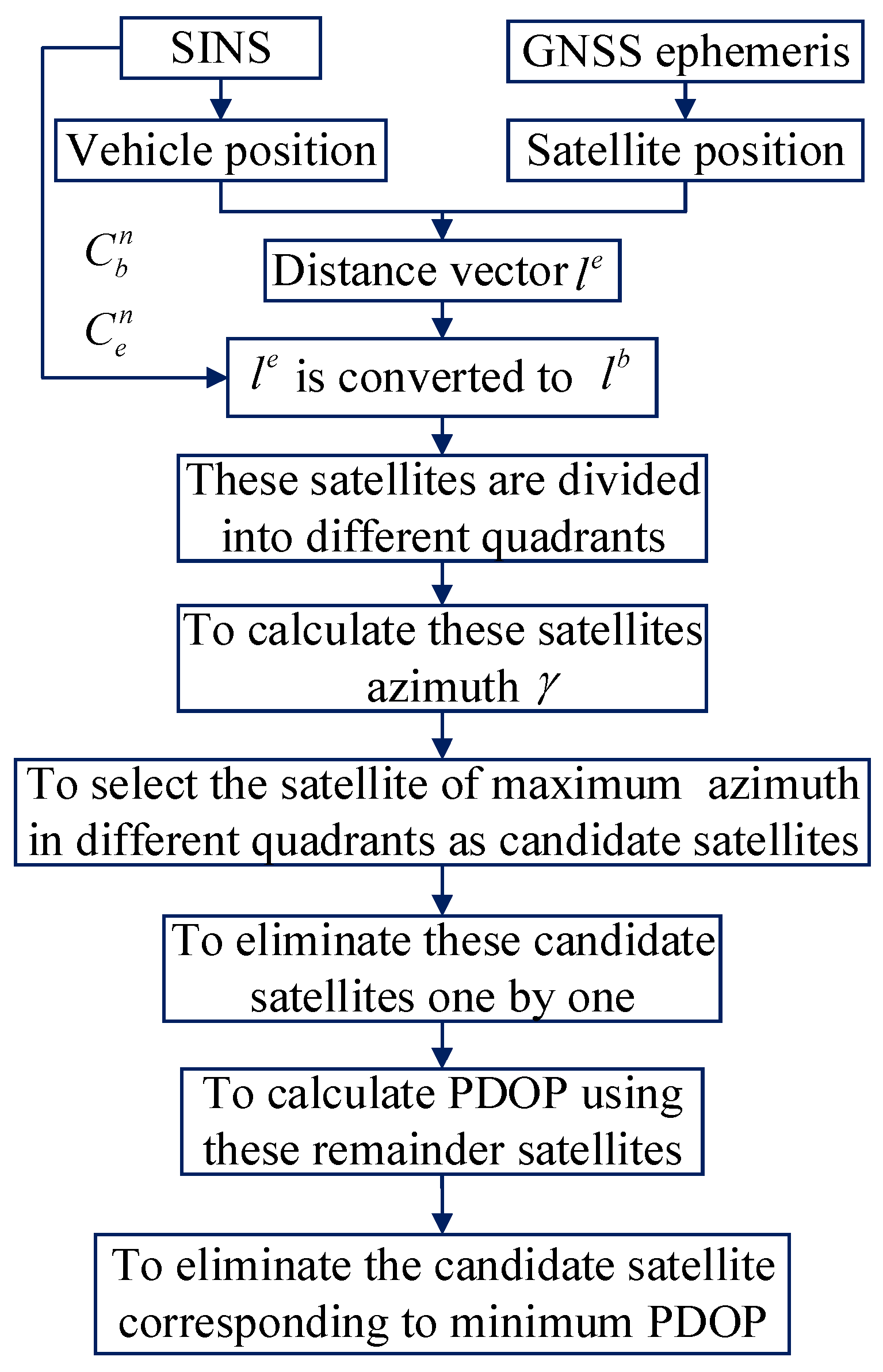
Figure 10e, this is because tall buildings and dense trees are located on both sides of the road. Due to the more severe GNSS-blocked environment on the right side of the road, the quality of the visual satellite in this area is low. Visual satellites C01, C13, and C59 in the forward and backward parts of the road are of high quality, and their SNRs are all greater than 37. Therefore, the satellite selection strategy based on the azimuth in the body plane frame is possible. When the proposed algorithm is used to select the subset of satellites, C06, C16, C14, C60, and G11 are successively eliminated based on the elevation angle, and G05, C08, G29, C27, and E15 are eliminated one by one based on the azimuth in the body plane frame. The ambiguity of the remaining satellite (
Figure 13b) can be fixed. In
Figure 13b, the satellites in the forward and backward directions are used, and the low-quality satellites on both sides of the road are eliminated.
In summary, the proposed algorithm has the best ability to resist gross errors in GNSS-blocked environments, and the proposed algorithm can achieve centimeter-level positioning faster than the other PAR schemes.
3.2. Case Two
A dynamic dataset of short baseline values, which included multiple GNSS-blocked environments, was collected by the vehicle-borne system. The data was collected in urban areas in Jinan, and the GNSS-blocked environments include tall buildings, dense trees, and pedestrian overpasses in these experiment areas.
Figure 14 shows the experimental areas and GNSS-blocked environments. In
Figure 14, the red line represents the GNSS-blocked area, and the red arrow points to the location of GNSS-blocked environment. The receivers of the base and rover stations could receive data from the GPS, BDS2, and Galileo satellites, and the baseline is within 2 km.
Figure 15 shows the number of satellites and PDOP in the entire experimental area. The satellite number changes frequency due to multiple GNSS-blocked environments in this data, and the PDOP is poor when the satellite is blocked.
These five designed schemes were used to solve this data to evaluate the performance of the proposed schemes.
Table 6 is the fixed rate of the integer ambiguities for the five designed schemes. In
Table 6, the fixed rate of the FAR scheme is 67.84% in the GNSS-blocked environments. The fixed rates are increased to 96.17%, 97.55%, and 97.55% by the PARE, PARVNE, and PARVYE schemes, respectively. The proposed scheme has the best fixed rate, reaching 98.74%.
Figure 16 shows the position errors of the designed schemes, and only the position results of fixed ambiguity are counted. In
Figure 16, there are meter-level position errors for the five schemes due to multiple GNSS-blocked environments. In
Figure 16a, there are meter-level position errors for some epochs, and data gaps also occur for some epochs because the ambiguities are unfixed. The epoch number of these fixed ambiguities is increased by the designed PAR schemes. Compared with the PARE, PARVNE, and PARVYE schemes, the epoch number of the meter-level position errors of the proposed scheme is significantly reduced, and the proposed scheme has a better ability to resist gross errors than the other designed PAR schemes.
Table 7 shows the RMS statistics of the position errors for the designed schemes. In
Table 7, the position accuracy is at the meter level for the designed schemes, and the RMS of the position errors for the proposed scheme is the optimal compared to the other designed schemes. The RMS of the position errors for the proposed scheme is 0.63 m, 0.46 m, and 0.74 m in the N, E, and U directions, respectively, and the RMS of the 3D position error reaches 1.07 m. Compared with the FAR, PARE, PARVNE, and PARVYE schemes, the RMS of the 3D position error of the proposed scheme is improved by 26.70%, 40.51%, 20.56%, and 33.47%.
Figure 17 shows the cumulative probability of the 3D position errors for the designed schemes. In
Figure 17, the cumulative probability of the 3D position errors within 0.1 m is 32.35% for the FAR scheme, and the cumulative probabilities are increased to 47.86%, 45.04%, and 45.98% by the PARE, PARVNE, and PARVYE schemes. The highest cumulative probability is obtained by the proposed scheme, and the probability reaches 50.00%. The cumulative probability within 0.2 m reaches 64.01% for the FAR scheme, and the cumulative probability is increased to more than 80% for the designed PAR scheme. The proposed scheme has the highest cumulative probability, reaching 92.59%.
For this short-baseline data of multiple GNSS-blocked environments, the proposed scheme obtains the highest fixed rate of integer ambiguity and the best positioning accuracy compared to other designed schemes.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}