
Identification System for Electric Bicycle in Compartment Elevators

Abstract
1. Introduction
1.1. Related Works
1.1.1. Sensor-Based Elevator Detection Methods
1.1.2. Traditional Computer Vision Approaches
1.1.3. YOLO Series Advancements
1.1.4. Other Network Architectures
1.1.5. Edge Deployment Challenges
1.1.6. Research Context and Gap
1.2. Advantages of the Proposed Solution
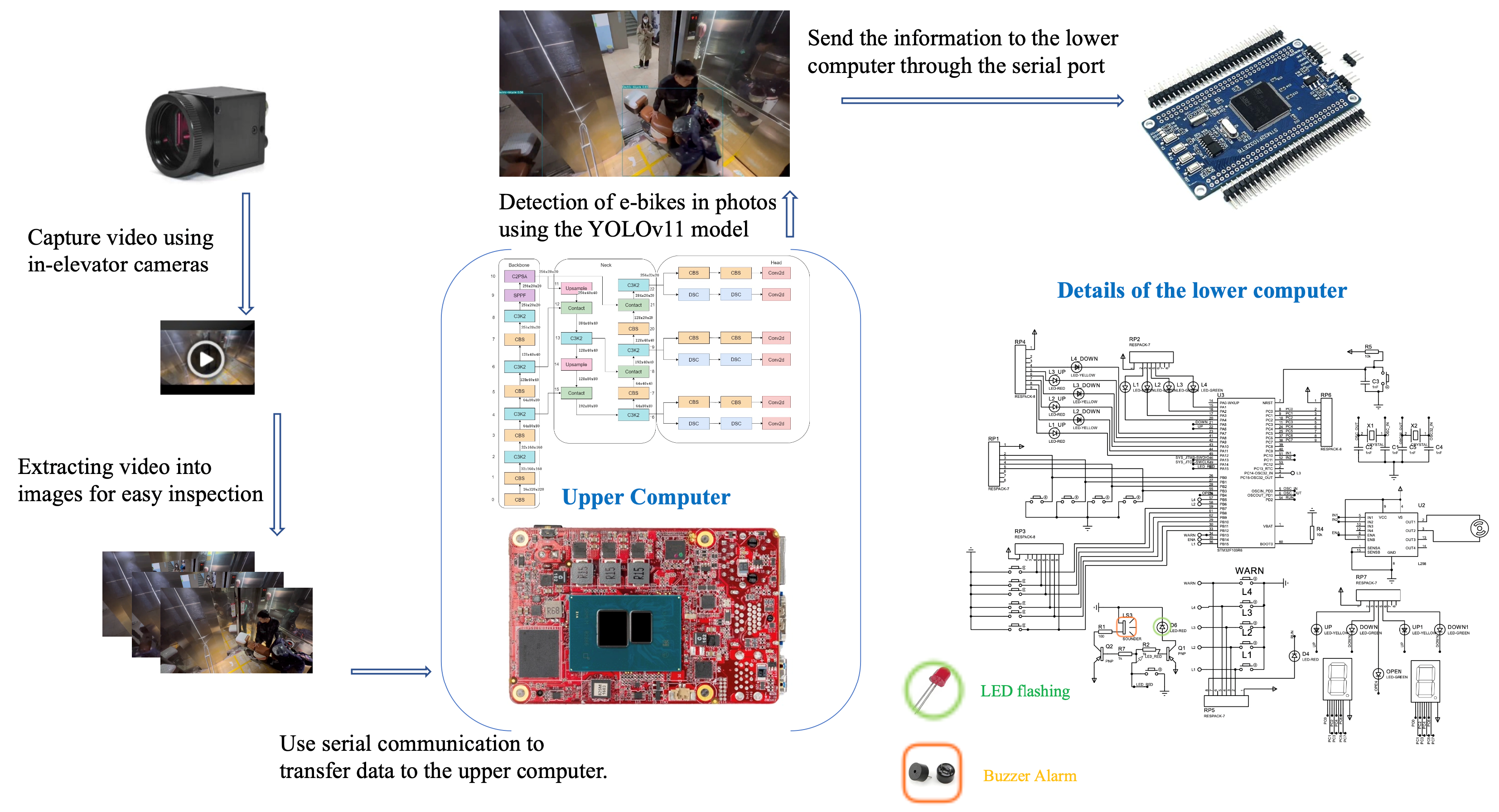
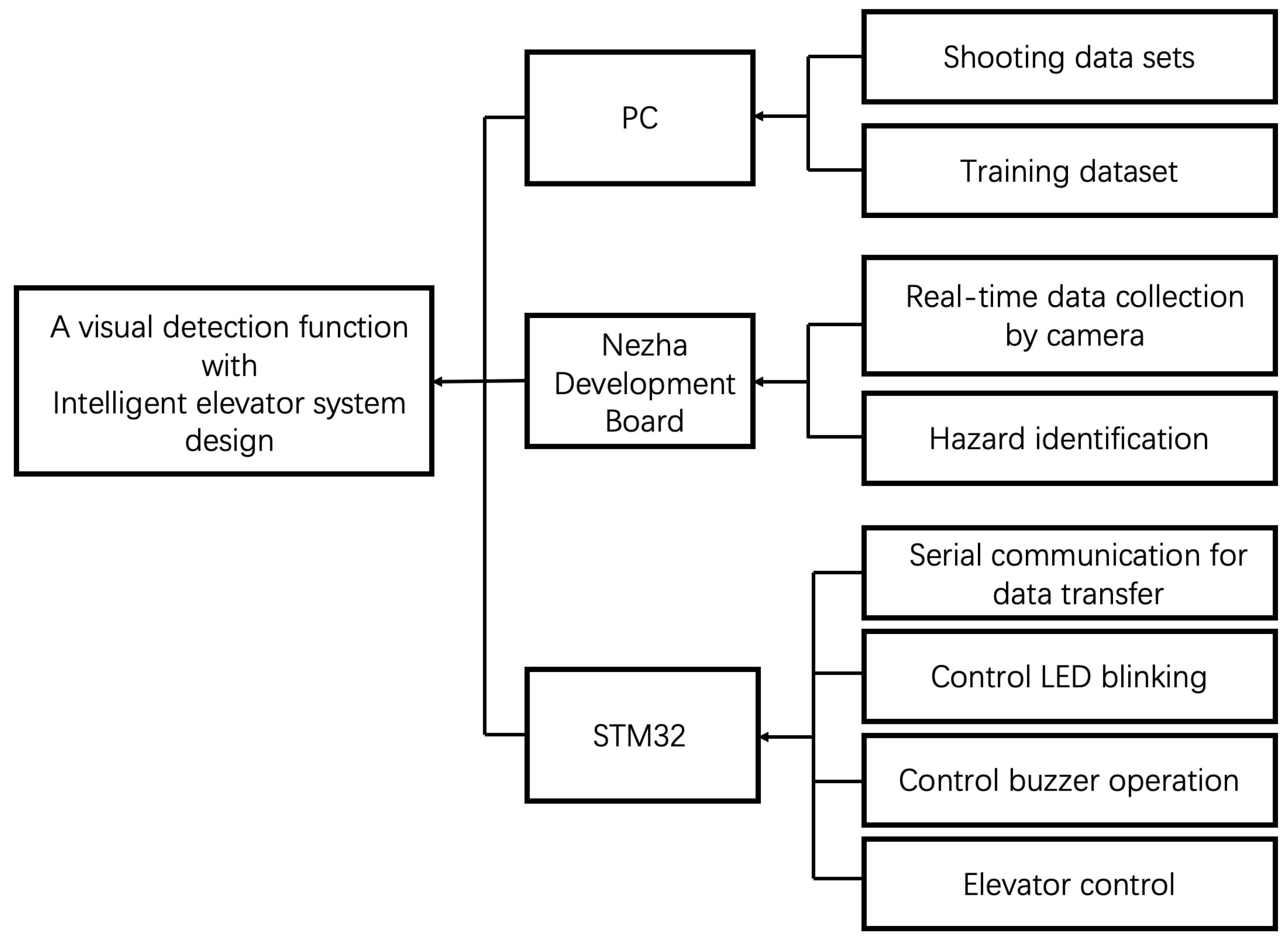
2. Methods
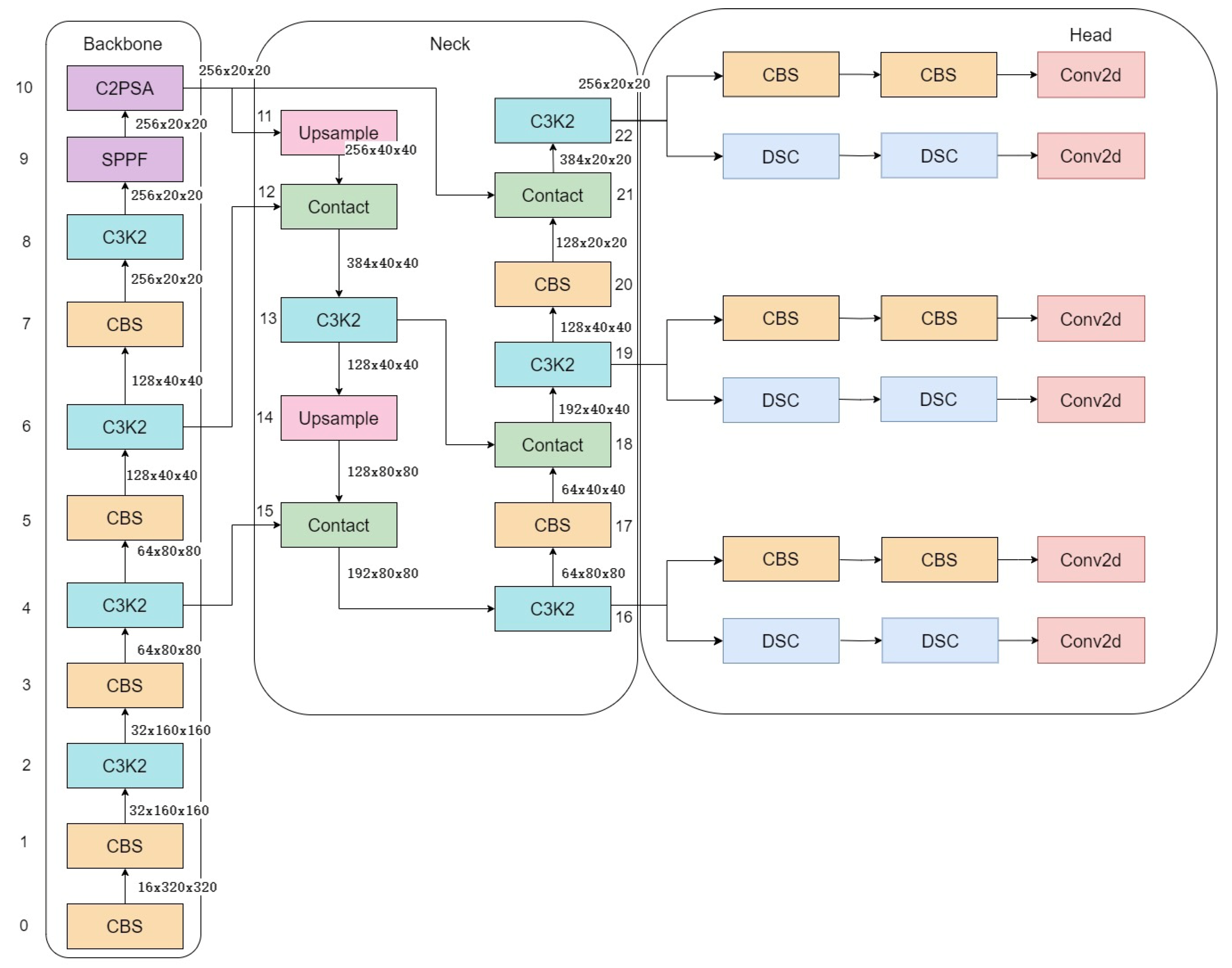
2.1. Target Recognition Algorithm
2.2. Algorithmic Principles
2.2.1. Target Detection Output Representation
- (x,y): Normalized coordinates of the bounding box center relative to the grid cell.
- (w,h): Width and height of the bounding box, scaled to the image dimensions.
- Confidence Score: Probability of an object existing within the bounding box ([0, 1]).
- C: Class probability vector.
2.2.2. Loss Function
2.3. Deployment Adaptation
2.3.1. Model Quantization
2.3.2. Real-Time Inference
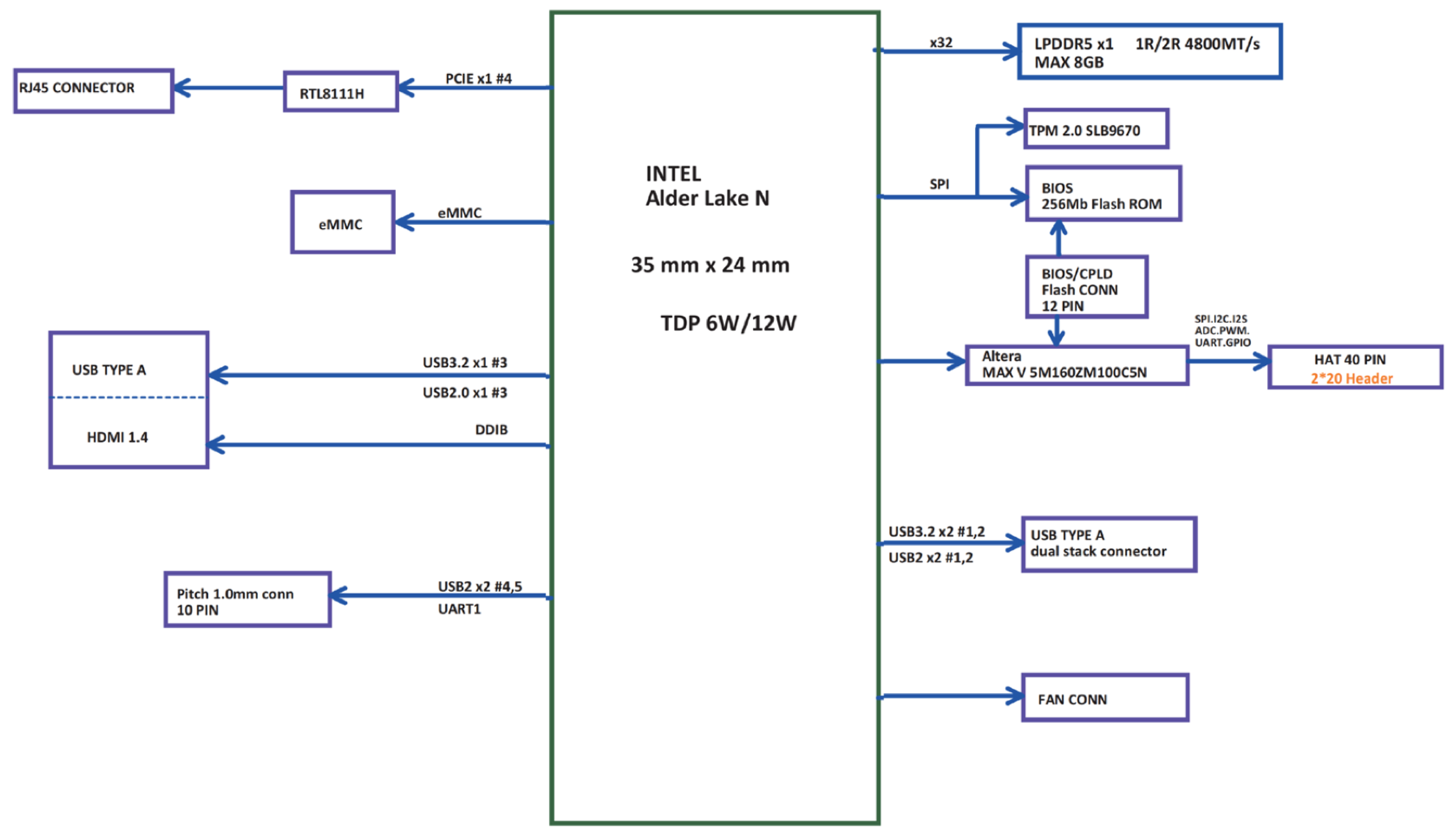
2.4. Upper Computer Development and Design
2.4.1. Core Features of Nezha Board
2.4.2. Summary of This Section
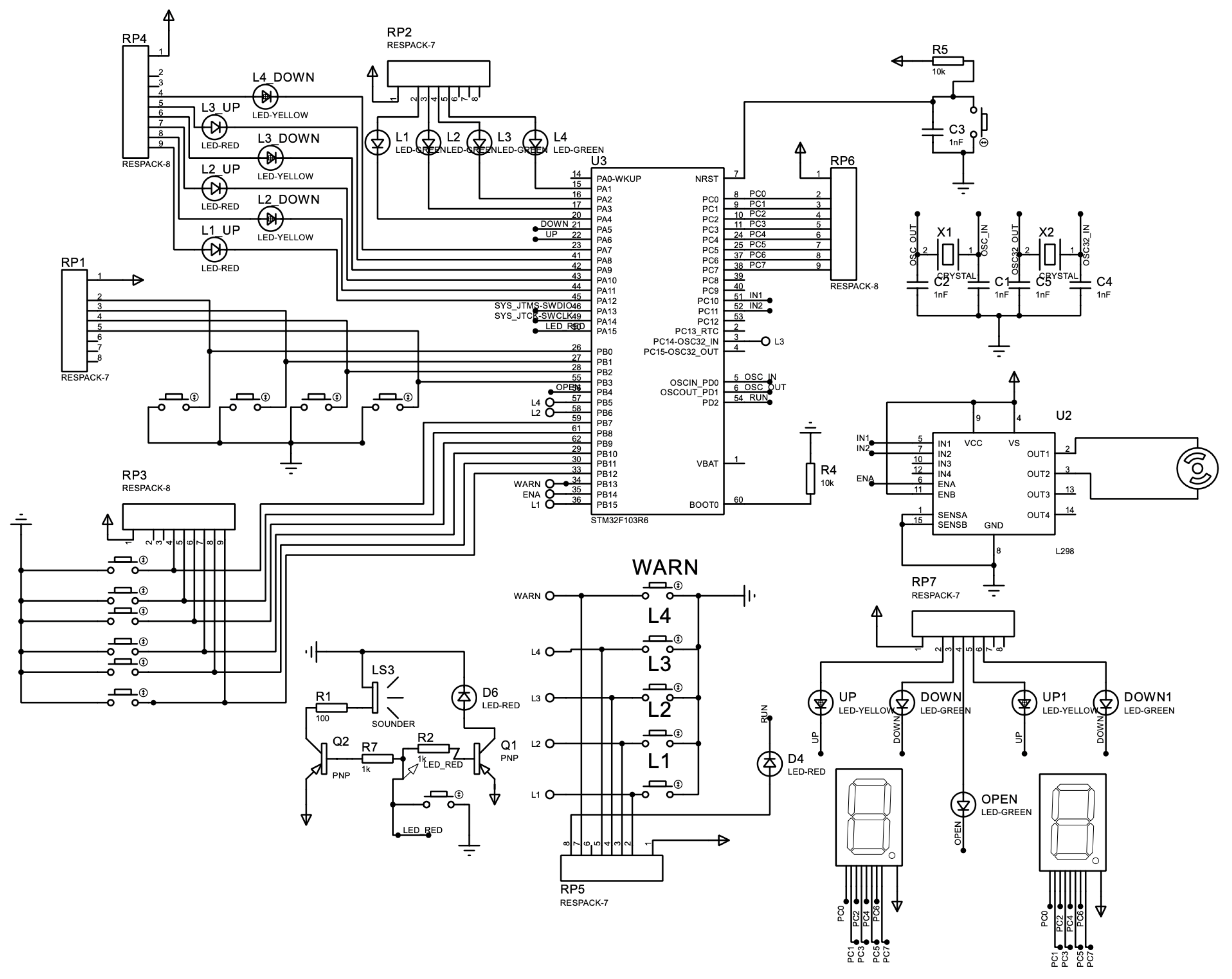
2.5. Development and Design of the Lower Computer
3. Experimental
3.1. Target Recognition Algorithm
3.2. Hyperparameter Settings and Training Strategies
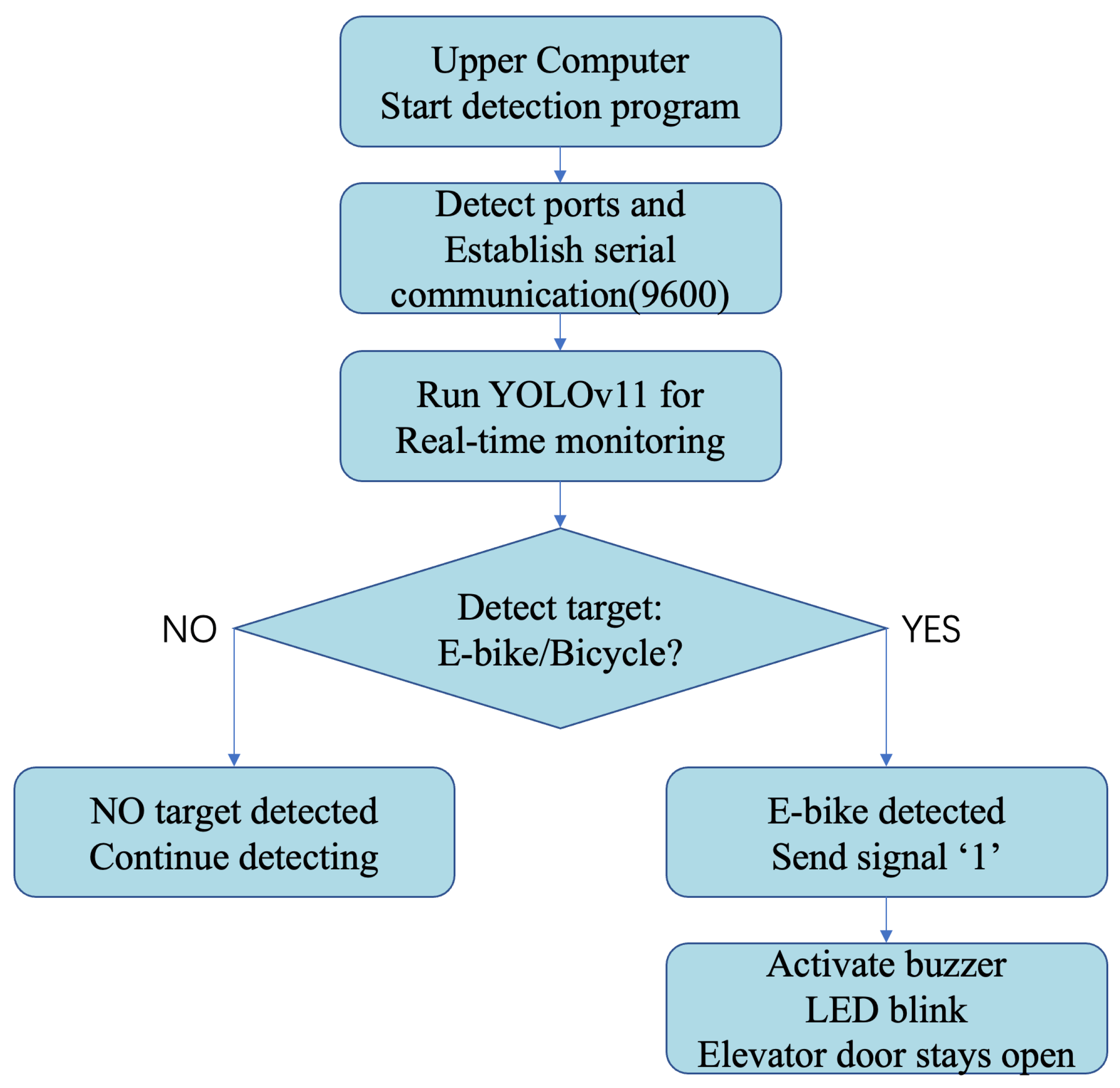
3.3. Communication Design Between the Upper and Lower Computer
3.4. Comparative Experiments
3.5. Experiments on the Difference Between E-Bikes and Bicycles
3.6. Fault Tolerance Experiments
4. Results and Discussion
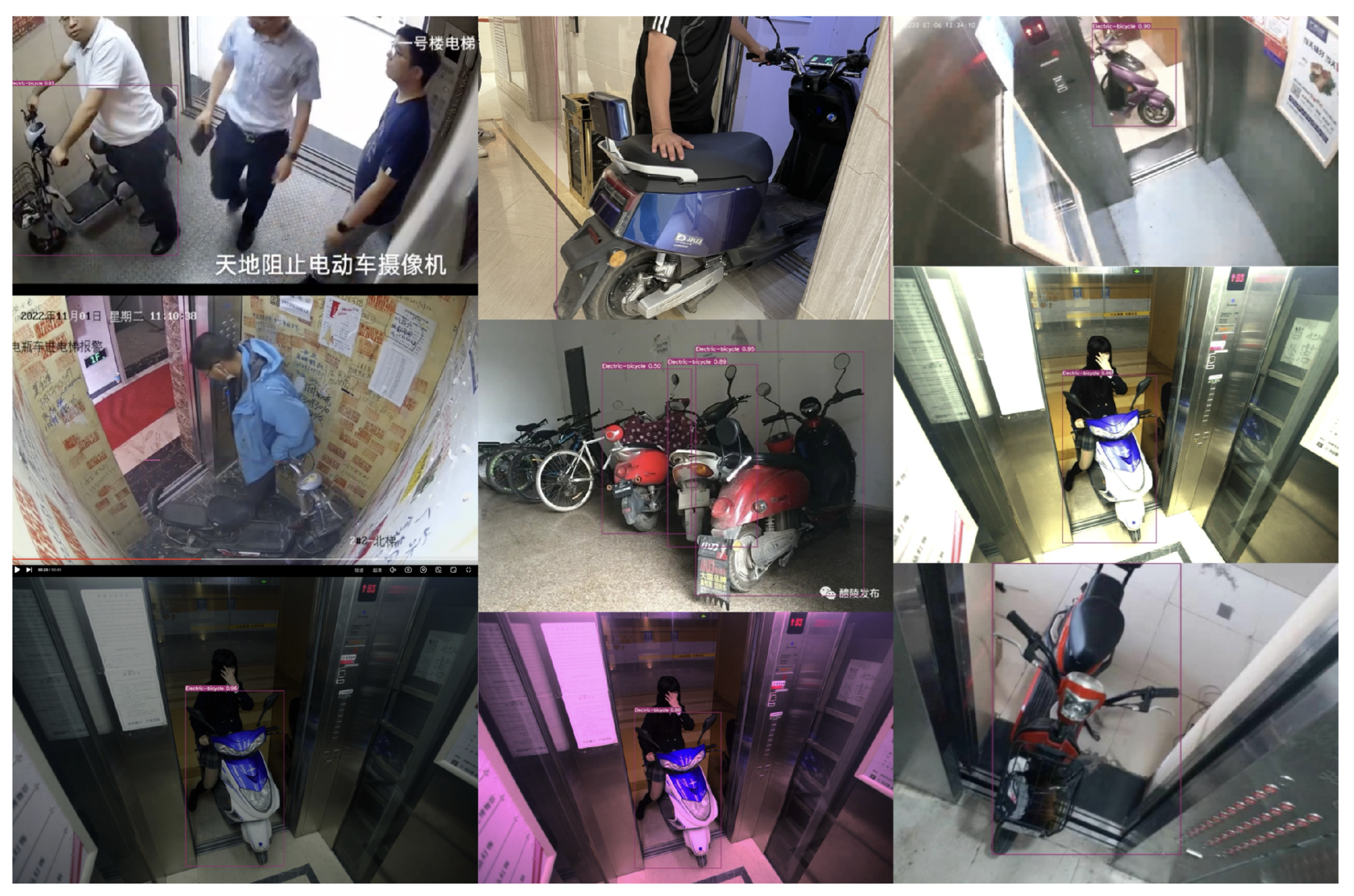
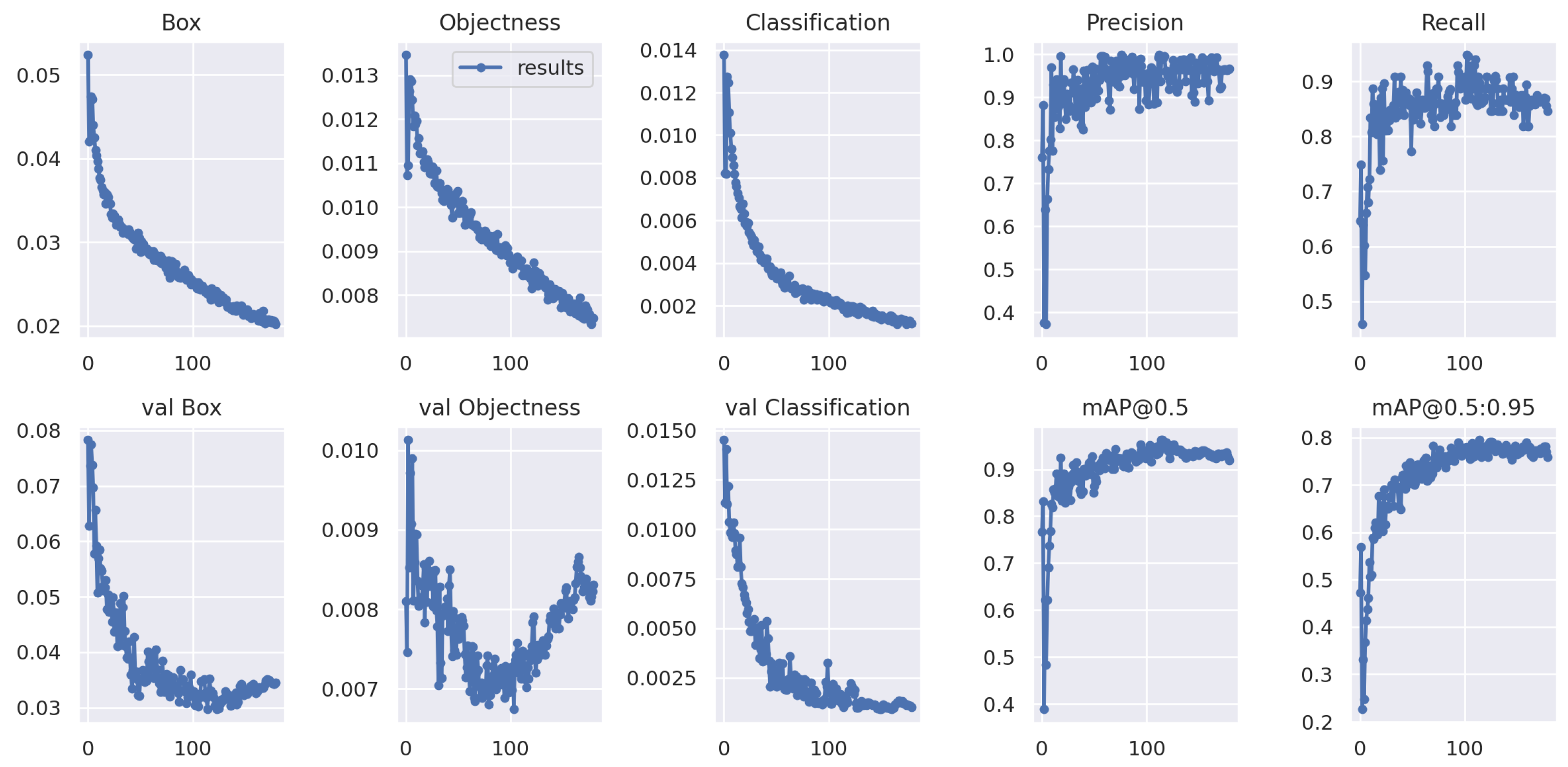
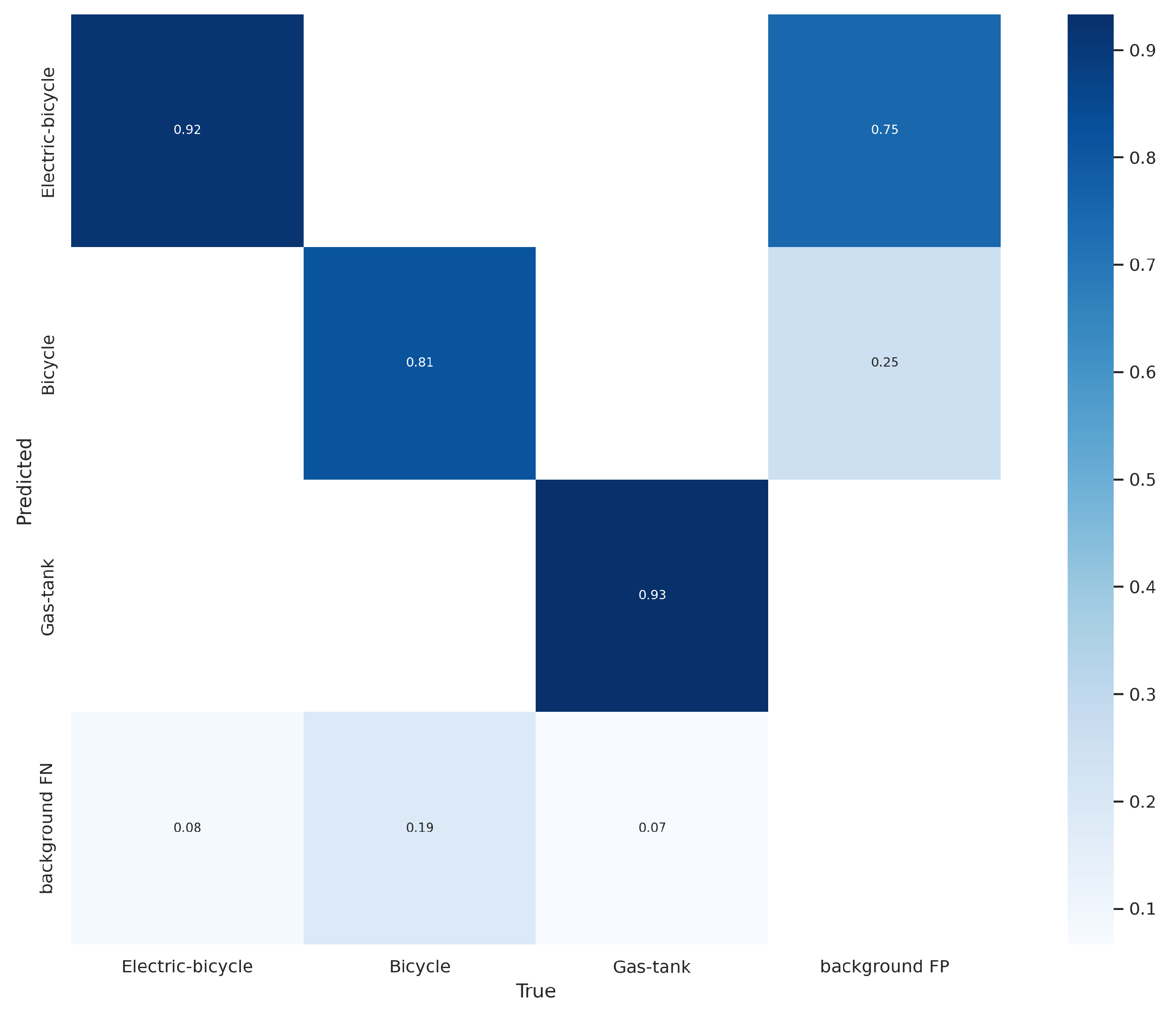
4.1. Target Recognition Experimental Results
4.2. Comparative Experiments Results
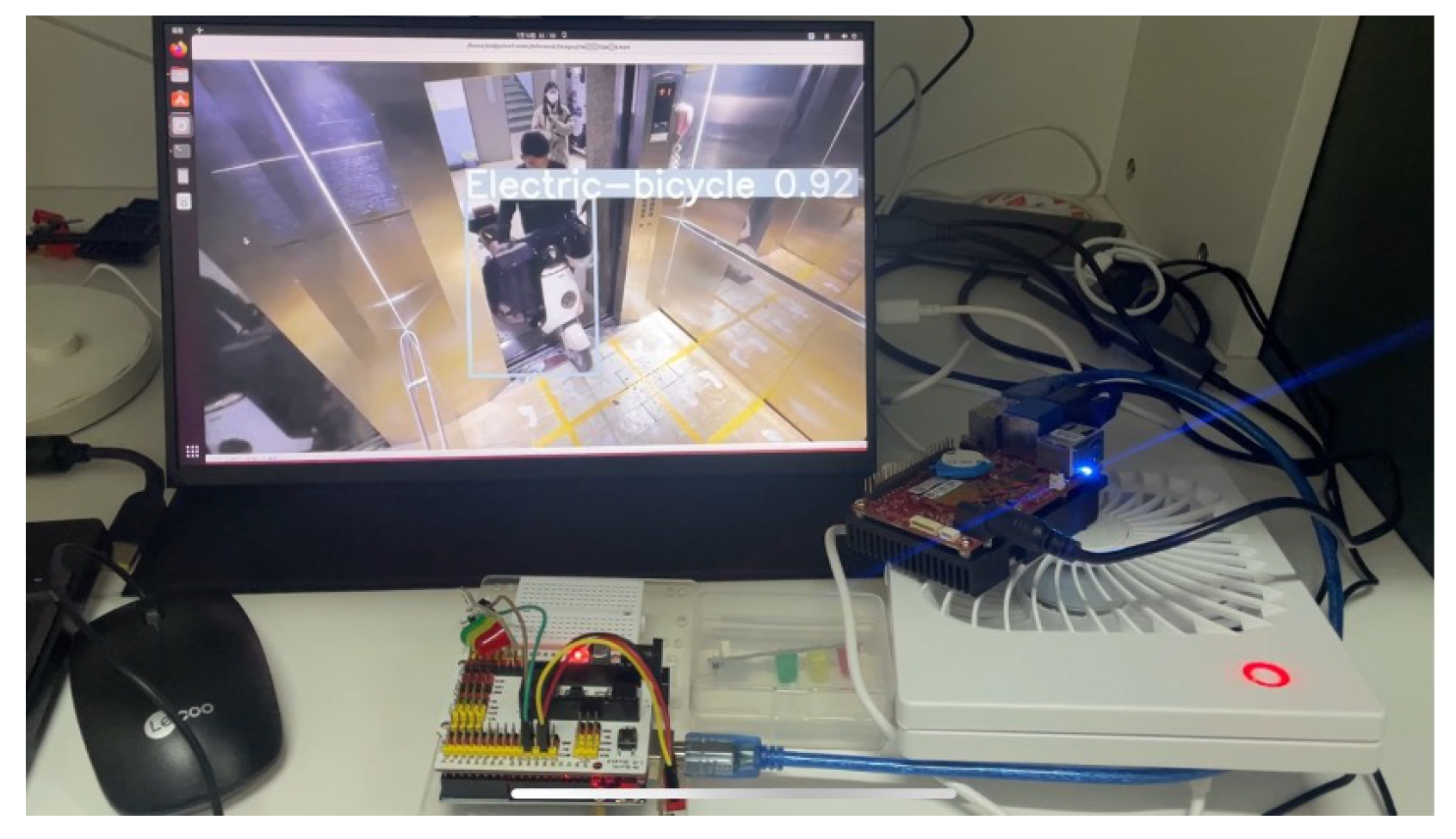
4.3. Hardware Experiment Analysis
4.4. Result of the Experiments on the Difference Between E-Bikes and Bicycles
5. Conclusions
5.1. Model Effectiveness and Hardware Acceleration
5.2. Cost–Benefit Analysis for Practical Implementation
5.2.1. Hardware and Implementation Costs
5.2.2. Operational Savings and Safety Benefits
6. Summary and Outlook
6.1. Summary of the Manuscript
6.2. Future Outlook
- Expanding the training dataset to include diverse hazard categories and fine-tuning the YOLOv11 model for multi-class classification.
- Introducing a hierarchical detection framework that prioritizes high-risk objects (e.g., electric bikes) while maintaining sensitivity to other hazards. For instance, integrating a lightweight multi-label classification module alongside the existing target detector.
- Leveraging transfer learning to minimize retraining costs, where the pre-trained YOLOv11 backbone is adapted for new hazard types with limited labeled data.
- Developing a distributed communication protocol for elevators across different floors, allowing real-time sharing of hazard detection results. For example, if an electric bike is detected on the 5th floor, adjacent elevators can preemptively activate warning mechanisms.
- Integrating floor-specific safety policies (e.g., high-rise buildings may require stricter control over lithium battery-carrying objects) through a centralized management system.
- Implementing dynamic path planning for elevators to avoid transporting hazardous items between floors, which can be achieved by modifying the STM32F103 control logic to accept floor-level coordination commands.
- Enable remote monitoring and real-time alerting for property managers, with detection data uploaded to a cloud server for analytics. This requires developing a secure API for data transmission between the Nezha board and cloud services (e.g., AWS IoT or Azure IoT).
- Utilize cloud-based machine learning for continuous model optimization. Historical detection data can be used to retrain YOLOv11 periodically, adapting to new hazard patterns (e.g., emerging e-bike models).
- Implement big data analysis to identify safety trends (e.g., peak hours for hazardous object entries), supporting proactive safety measures. For example, the cloud platform could generate weekly reports on elevator safety incidents for building administrators.
6.3. Privacy and Regulatory Considerations
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mou, H.; Sun, J.; Pan, Y.; Wang, J.; Wang, Z.; Qin, J. Study on the Management Way of “Banning Electric Bicycles from Going Upstairs” in Tianjin. Law Justice 2023, 2, 52–55. [Google Scholar] [CrossRef]
- Liu, Q.; Yu, W.; Zou, S.; Wang, K. Fire safety alarm system for high-rise buildings based on machine vision. In Proceedings of the Fourth International Conference on Machine Learning and Computer Application (ICMLCA 2023), Hangzhou, China, 27–29 October 2023; Volume 13176. [Google Scholar]
- Khan, S.; Ullah, K. Smart elevator system for hazard notification. In Proceedings of the 2017 International Conference on Innovations in Electrical Engineering and Computational Technologies (ICIEECT), Karachi, Pakistan, 5–7 April 2017. [Google Scholar]
- Gao, X.; Wei, W.; Wang, J. Electric Bicycle detection system in elevator based on TensorRT accelerated inference. Comput. Sci. Appl. 2022, 12, 11. [Google Scholar]
- Chen, Z.; Yang, J.; Li, F.; Feng, Z.; Chen, L.; Jia, L.; Li, P. Foreign Object Detection Method for Railway Catenary Based on a Scarce Image Generation Model and Lightweight Perception Architecture. IEEE Trans. Circuits Syst. Video Technol. 2025. [Google Scholar] [CrossRef]
- Lv, Q.; Lin, H.; Liu, X. Design of Dangerous behavior detection system for electric vehicle entering elevator based on OR-CNN. Electromech. Eng. Technol. 2024, 53, 253–256. [Google Scholar]
- Wang, Z.; Hu, C.; Li, J. Electric bicycle detection in elevator car based on YOLOv5. In Proceedings of the 3rd International Conference on Artificial Intelligence, Automation, and High Performance Computing (AIAHPC 2023), Hong Kong, China, 31 March–2 April 2023; Volume 12717. [Google Scholar]
- Zhao, Z.; Li, S.; Wu, C.; Wei, X. Research on the Rapid Recognition Method of Electric Bicycles in Elevators Based on Machine Vision. Sustainability 2023, 15, 13550. [Google Scholar] [CrossRef]
- Su, J.; Yang, M.; Tang, X. Integration of ShuffleNet V2 and YOLOv5s Networks for a Lightweight Object Detection Model of Electric Bikes within Elevators. Electronics 2024, 13, 394. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, X.; Wu, C. An Improved Lightweight YOLOv5s-Based Method for Detecting Electric Bicycles in Elevators. Electronics 2024, 13, 2660. [Google Scholar] [CrossRef]
- Yang, X. Electric bike detection algorithm in elevator based on improved YOLOv3. Comput. Era 2023, 7, 61–65. [Google Scholar]
- Zhu, X.; Niu, D.; Ding, L.; Qian, G.; Chen, X.; Liang, S. Design and Implementation of Elevator Cloud Monitoring System. In Proceedings of the Jiangsu Annual Conference on Automation (JACA 2020), Zhenjiang, China, 13–15 November 2020; The Institution of Engineering and Technology: Stevenage, UK, 2020; Volume 2020. No. 4. [Google Scholar]
- Cao, F.; Sheng, G.; Feng, Y. Detection Dataset of electric bicycles for lift control. Alexandria Eng. J. 2024, 105, 736–742. [Google Scholar] [CrossRef]
- Lin, Y.; Chen, X.; Zhong, W.; Pan, Z. Online detection system for electric bike in elevator or corridors based on multi-scale fusion. In Proceedings of the 2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Changsha, China, 26–28 March 2021; pp. 31–34. [Google Scholar]
- Tang, S.; Huang, X.; Zhao, N.; Xiao, W.; Chen, Y.; Zhu, C. Research on two-wheeled bicycle entry ban system based on deep learning. In Proceedings of the International Conference on Advanced Intelligent Systems and Informatics, Cairo, Egypt, 20–22 November 2022; Springer International Publishing: Cham, Switzerland, 2022. [Google Scholar]
- Huang, H.; Xie, X.; Zhou, L. Detection and Alarm of E-bike Intrusion in Elevator Scene. Eng. Lett. 2021, 29. [Google Scholar]
- Wu, Y.; Zhu, Y.; Xu, F.; Xu, J. Analysis Model for Fire Accidents of Electric Bicycles Based on Principal Component Analysis. In Proceedings of the 2017 IEEE International Conference on Computational Science and Engineering (CSE) and IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Guangzhou, China, 21–24 July 2017; Volume 1. [Google Scholar]
- Xia, Z. An Elevator Forbidden Target Discovery Method Based on Computer Vision. In Proceedings of the 2023 IEEE 3rd International Conference on Computer Systems (ICCS), Qingdao, China, 22 September 2023. [Google Scholar]
- Li, Y.; Zhang, M.; Wang, J.; Xing, Y.; Liu, Y.; Wang, X. Elevator E-Bike Detection based on Improved YOLOv3. Int. Core J. Eng. 2024, 10, 47–51. [Google Scholar]
- Li, Y.; Zhang, M.; Wang, J.; Liu, Y.; Xing, Y.; Wang, X. YOLOv3 for Elevator Security: Detecting Electric Bikes. Int. Core J. Eng. 2024, 10, 199–202. [Google Scholar]
- He, Y. Automatic Detection of Electric Motorcycle Based on Improved YOLOv5s Network. J. Electr. Comput. Eng. 2024, 2024, 4889707. [Google Scholar] [CrossRef]
- Wan, Y.; Hu, Y.; Li, X.; Song, Z.; Hou, T. Improved Algorithm of Elevator Blocking System Based on YOLOv8. In Proceedings of the 2024 12th International Conference on Information Systems and Computing Technology (ISCTech), Xi’an, China, 8–11 November 2024. [Google Scholar]
- Yan, X.; Xu, S.; Zhang, Y.; Li, B. Elevent: An Abnormal Event Detection System in Elevator Cars. In Proceedings of the 2024 27th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Tianjin, China, 8–10 May 2024. [Google Scholar]
- Wang, C.; Huang, Z.; Peng, W. Research on passenger behavior monitoring system in elevator based on Android. In Proceedings of the Third International Conference on Artificial Intelligence and Electromechanical Automation (AIEA 2022), Changsha, China, 8–10 April 2022; Volume 12329. [Google Scholar]
- Liu, Y.; Xu, Q.; Yang, Y.; Zhang, W. Detection of electric bicycle indoor charging for electrical safety: A nilm approach. IEEE Trans. Smart Grid 2023, 14, 3862–3875. [Google Scholar] [CrossRef]
- Ge, H.; Hamada, T.; Sumitomo, T.; Koshizuka, N. Intellevator: An Intelligent Elevator System Proactive In Traffic Control for Time-efficiency Improvement. IEEE Access 2020, 8, 35535–35545. [Google Scholar] [CrossRef]
- Yan, L.; Wang, Q.; Zhao, J.H.; Guan, Q.; Tang, Z.; Zhang, J.; Liu, D. Radiance Field Learners as UAV First-Person Viewers. In Computer Vision–ECCV 2024; Leonardis, A., Ricci, E., Roth, S., Russakovsky, O., Sattler, T., Varol, G., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2025; Volume 15119, pp. 1–18. [Google Scholar] [CrossRef]
- Wang, W.; Xu, Y.; Xu, Z.; Zhang, C.; Li, T.; Wang, J. A Detection Method of Electro-bicycle in Elevators Based on Improved YOLO v4. In Proceedings of the 2021 26th International Conference on Automation and Computing (ICAC), Portsmouth, England, 2–4 September 2021. [Google Scholar]
- Khanam, R.; Hussain, M. YOLOv11: An Overview of the Key Architectural Enhancements. arXiv 2024, arXiv:2410.17725. [Google Scholar]
- He, B. Elevator Car electric bicycle banning system based on deep learning and edge computing technology. China Elev. 2023, 34, 15–19+22. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Key Limitations | Impact on Elevator Safety |
|---|---|---|
| Sensor-based | Inability to visually confirm hazards; vulnerability to environmental interference (e.g., vibration) | High false alarm rate; potential miss-detection of e-bikes in complex poses |
| Traditional CV | Poor adaptability to lighting changes; manual feature engineering lacks scalability | Inconsistent detection performance under varying elevator lighting conditions |
| Deep Learning | Heavy models unsuitable for edge deployment; insufficient focus on e-bike detail features | High latency in real-time systems; frequent miss-detections in occluded scenarios |
| Model | Detection Accuracy/% | mAP/% |
|---|---|---|
| YOLOv3 | 89.23 | 90.44 |
| YOLOv8 | 91.7 | 80.10 |
| AUGMIX-YOLOv8-org | 95.8 | 82.40 |
| YOLOv11 | 96.0 | 92.61 |
| Detection Transformer | 88.89 | 85.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Y.; Wang, W. Identification System for Electric Bicycle in Compartment Elevators. Electronics 2025, 14, 2638. https://doi.org/10.3390/electronics14132638
Han Y, Wang W. Identification System for Electric Bicycle in Compartment Elevators. Electronics. 2025; 14(13):2638. https://doi.org/10.3390/electronics14132638
Chicago/Turabian StyleHan, Yihang, and Wensheng Wang. 2025. "Identification System for Electric Bicycle in Compartment Elevators" Electronics 14, no. 13: 2638. https://doi.org/10.3390/electronics14132638
APA StyleHan, Y., & Wang, W. (2025). Identification System for Electric Bicycle in Compartment Elevators. Electronics, 14(13), 2638. https://doi.org/10.3390/electronics14132638