
DCCopGAN: Deep Convolutional Copula-GAN for Unsupervised Multi-Sensor Anomaly Detection in Industrial Gearboxes

Abstract
1. Introduction
- (1)
- A novel unsupervised multi-sensor anomaly detection framework, DCCopGAN, is proposed. DCCopGAN employs a Deep Convolutional Generative Adversarial Network (DCGAN) to generate reconstruction errors from high-dimensional multi-sensor data. These errors are then analyzed by an efficient and distribution-agnostic Copula-Based Outlier Detection (CopOD) for accurate anomaly identification and robust generalization.
- (2)
- The development of an effective fault detection method that operates in a purely unsupervised manner, making it highly suitable for industrial scenarios where labeled data is often unavailable.
- (3)
- Comprehensive validation of the DCCopGAN model on a real-world gearbox dataset, demonstrating its superior accuracy and robustness compared to existing unsupervised methods and confirming its practical applicability.
2. Preliminaries
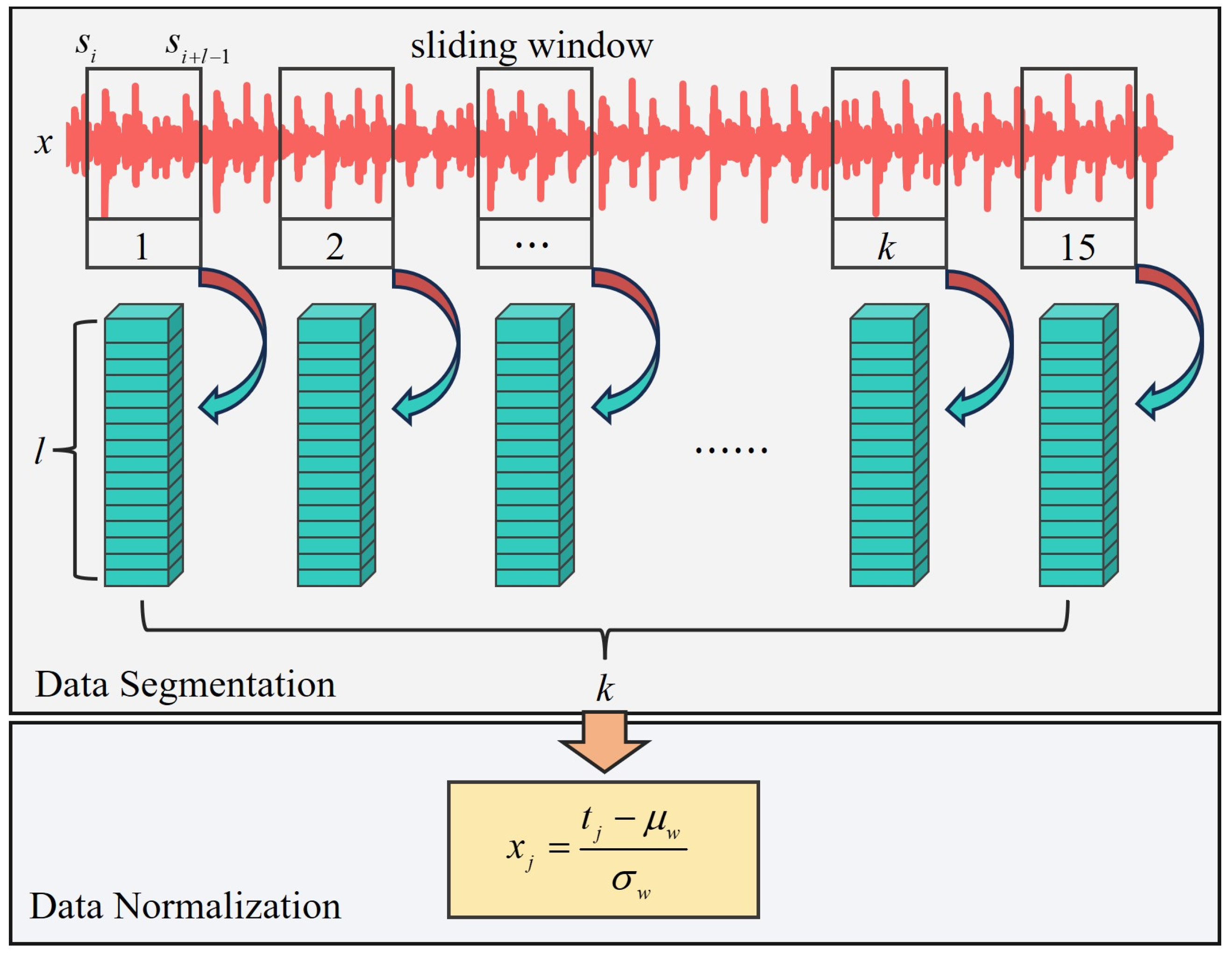
2.1. Data Preprocessing and Preparation
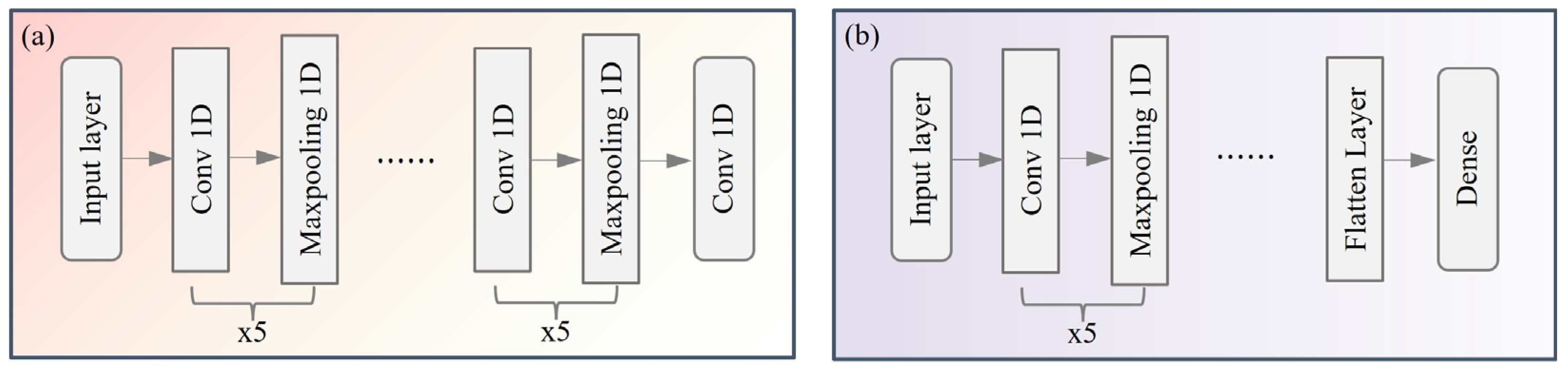
2.2. Deep Convolutional Generation Adversarial Network
2.3. Copula-Based Outlier Detection
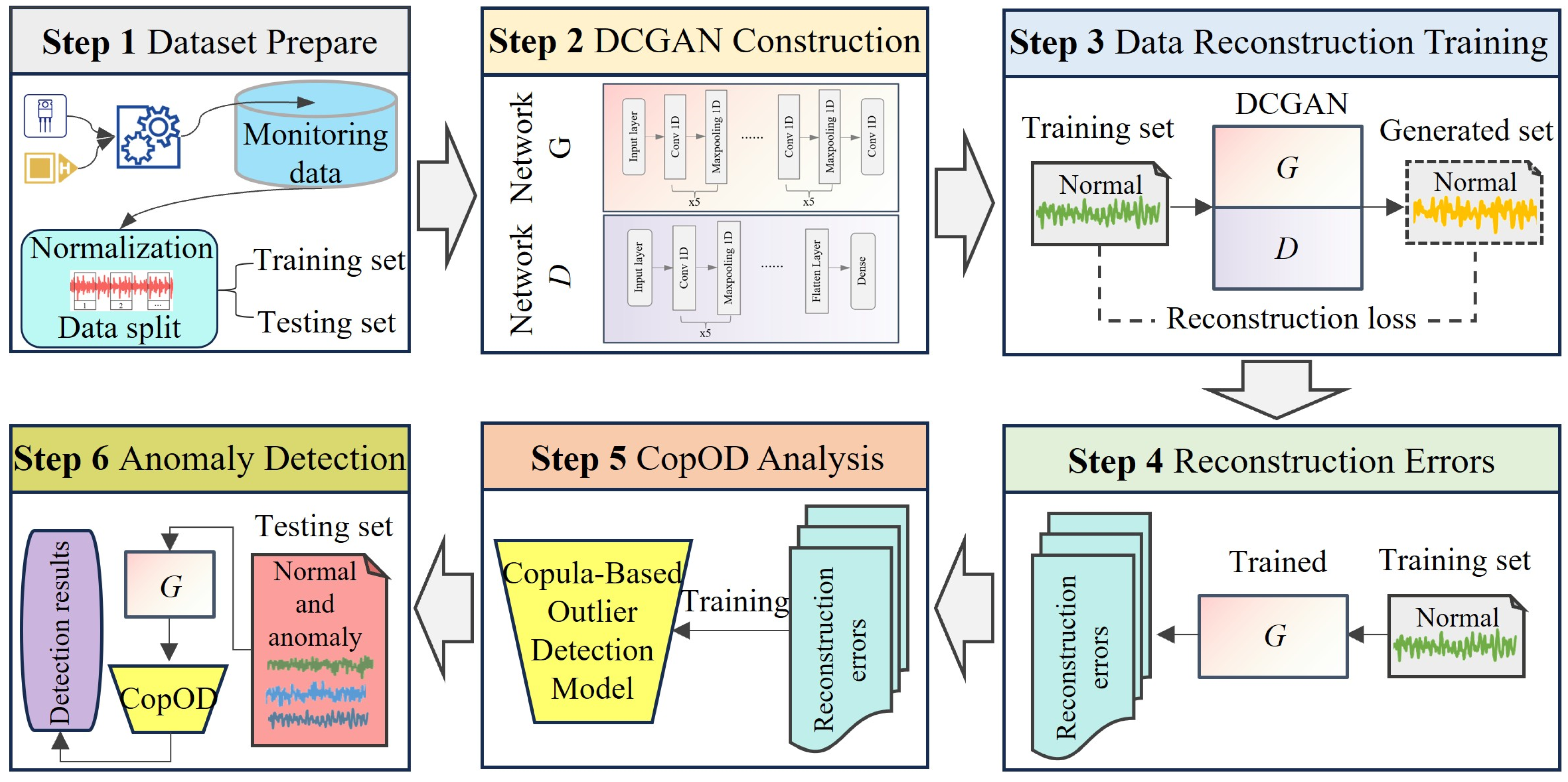
3. The Proposed DCCopGAN
4. Experiments
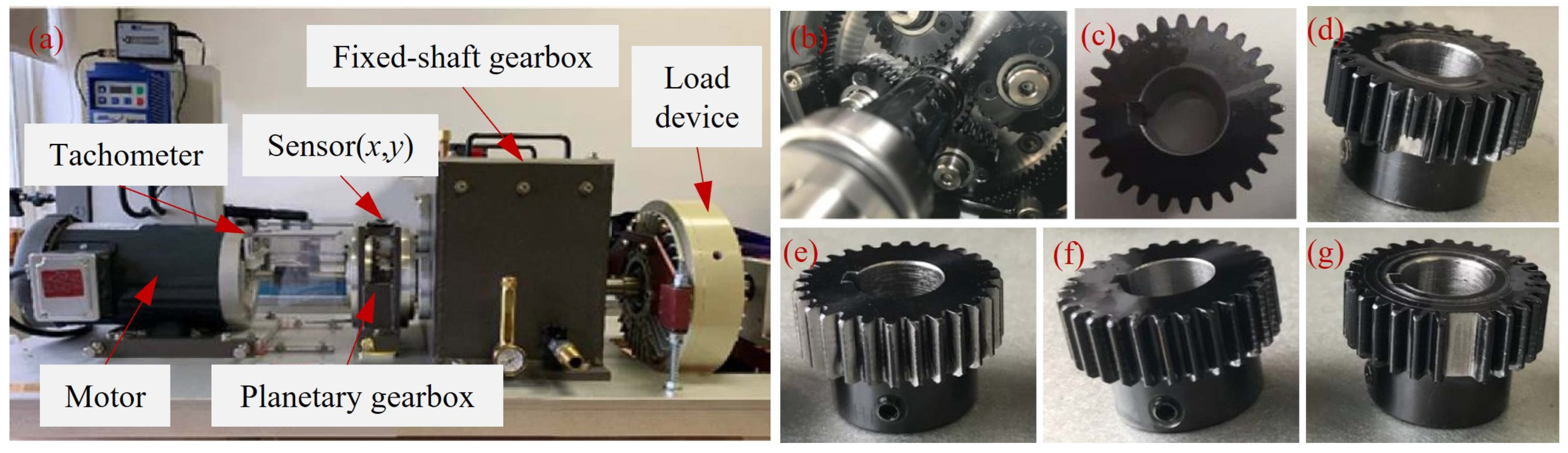
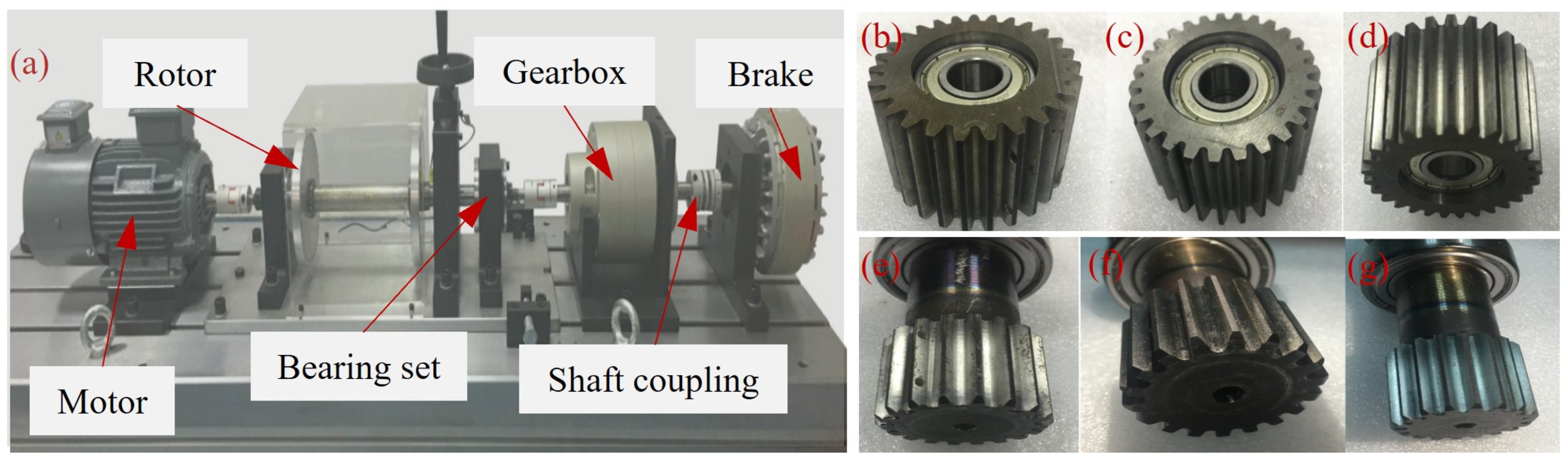
4.1. Dataset Description
4.2. Experimental Setups
4.3. Comparative Methods
4.4. The Details of DCCopGAN
5. Results and Discussion
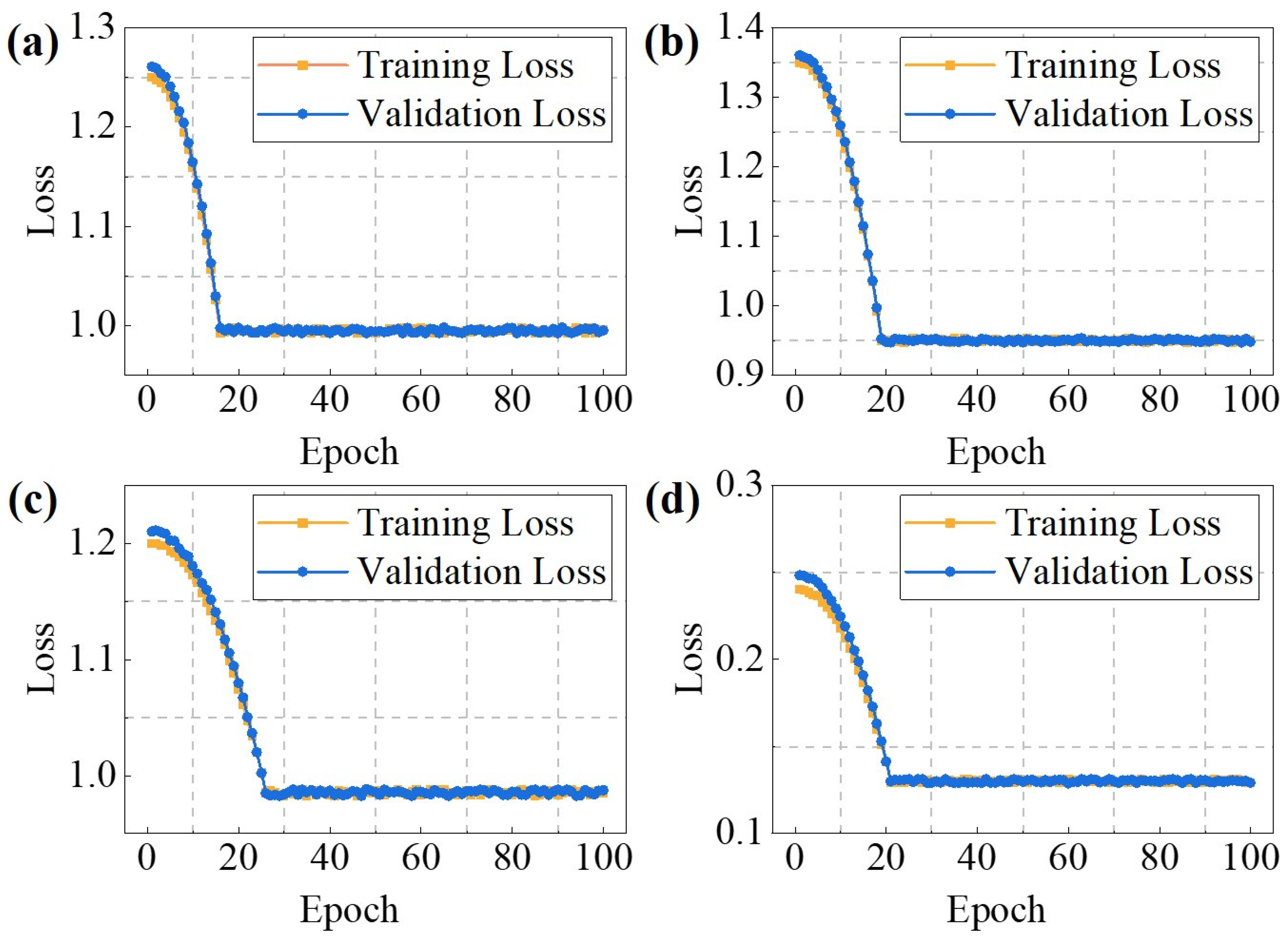
5.1. The Stability of Various Models
5.2. The Anomaly Detection Accuracy
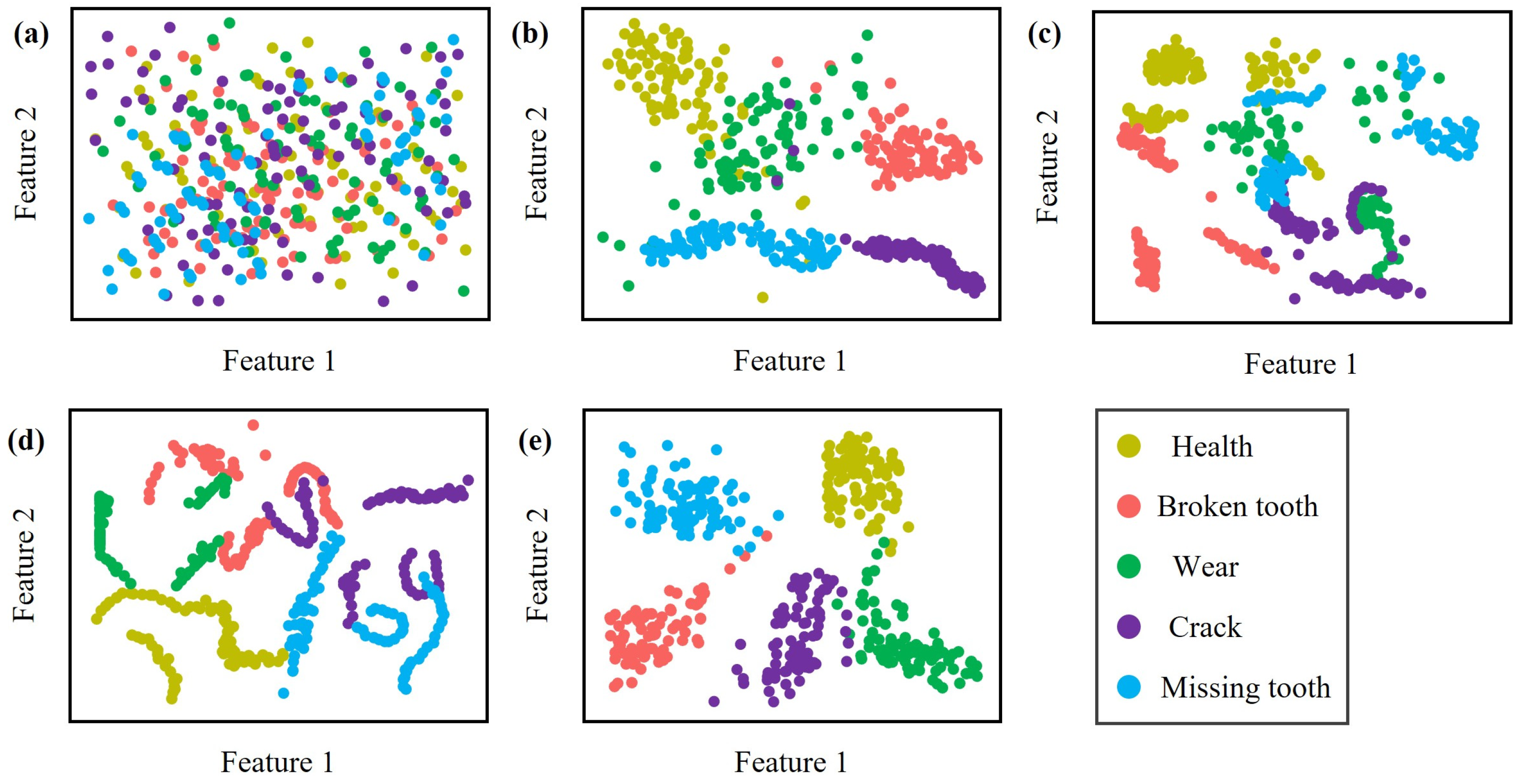
5.3. Comparison of Clustering Effect
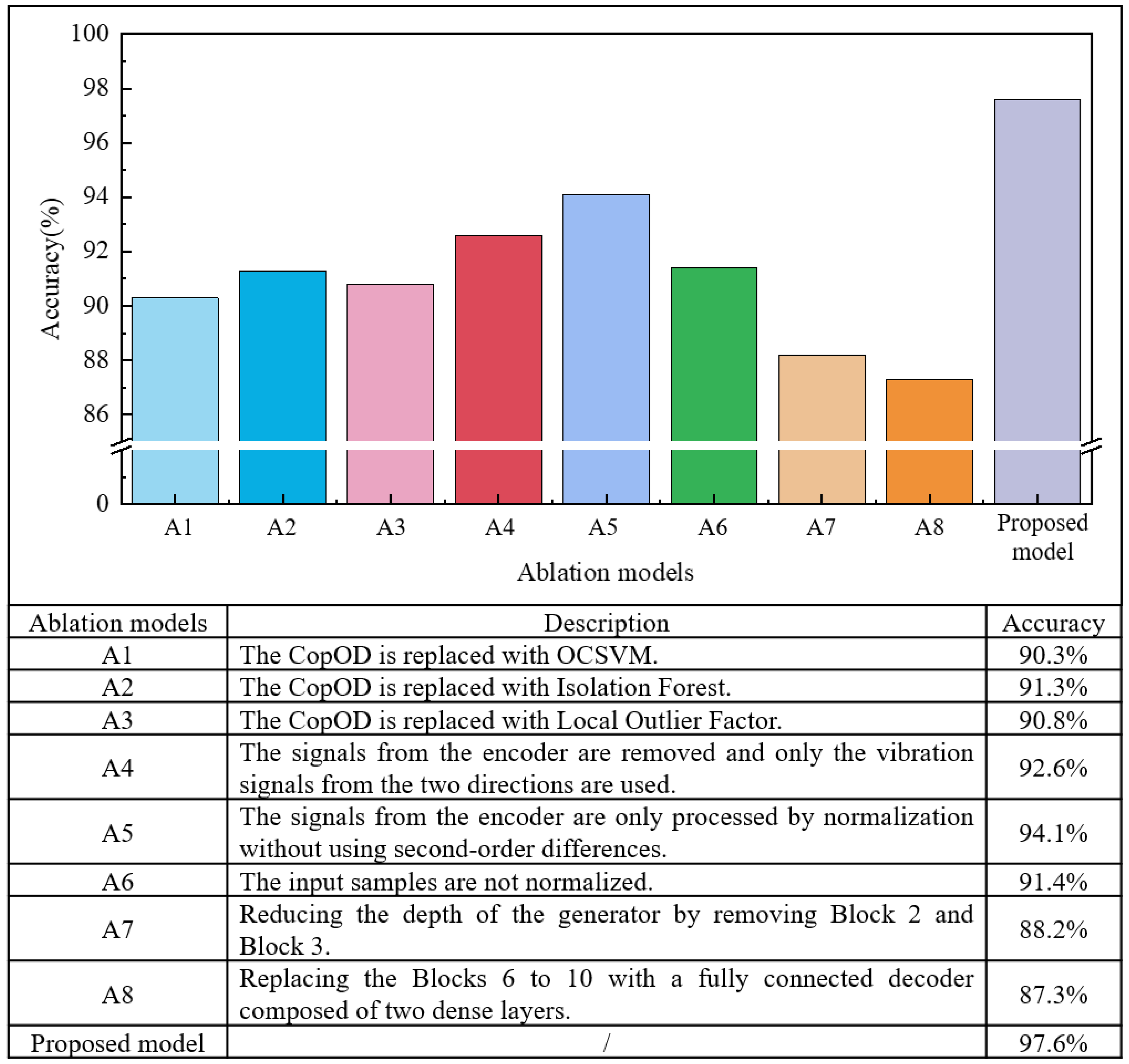
5.4. Ablation Study
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, Y.; Shu, R.; Li, S.; Feng, K.; Yang, X.; Zhao, Z. Imbalanced Learning for Gearbox Fault Detection via Attention-Based Multireceptive Field Convolutional Neural Networks with an Adaptive Label Regulation Loss. IEEE Trans. Instrum. Meas. 2024, 73, 3529211. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Q.; Xie, F.; Wang, X.; Wu, S. Incipient fault detection of planetary gearbox under steady and varying condition. Expert Syst. Syst. Syst. Appl. 2023, 233, 121003. [Google Scholar] [CrossRef]
- Su, C.; Bi, T.; Pan, A.; Gong, Y.; Luo, L.; Chen, J.; Yang, Z. Failure analysis on abnormal cracking of polycarbonate plates used in the gearbox oil level gauge for high-speed train. Eng. Fail. Anal. 2023, 143, 106871. [Google Scholar] [CrossRef]
- Li, S.; Zhao, M.; Ou, S.; Chen, D.; Wei, Y. A periodic anomaly detection framework based on matrix profile for condition monitoring of planetary gearboxes. Measurement 2023, 218, 113243. [Google Scholar] [CrossRef]
- Li, Z.; Duan, M.; Xiao, B.; Yang, S. A novel anomaly detection method for digital twin data using deconvolution operation with attention mechanism. IEEE Trans. Ind. Inform. 2022, 19, 7278–7286. [Google Scholar] [CrossRef]
- Zuo, Z.; Zhang, H.; Ma, L.; Liu, T.; Liang, S. Leak detection for natural gas gathering pipelines under multiple operating conditions using RP-1dConvLSTM-AE and multimodel decision. IEEE Trans. Ind. Electron. 2023, 71, 6263–6273. [Google Scholar] [CrossRef]
- Chang, Z.; Jia, K.; Han, T.; Wei, Y. Towards more reliable photovoltaic energy conversion systems: A weakly-supervised learning perspective on anomaly detection. Energy Convers. Manag. 2024, 316, 118845. [Google Scholar] [CrossRef]
- Kong, F.; Li, J.; Jiang, B.; Wang, H.; Song, H. Integrated generative model for industrial anomaly detection via bidirectional LSTM and attention mechanism. IEEE Trans. Ind. Inform. 2021, 19, 541–550. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, G.; Wang, L.; Li, Y.; Li, X.; Xie, P. A novel impulse information-enhanced semi-supervised learning for few-label fault diagnosis of rotary machines. IEEE Sens. J. 2023, 23, 27658–27669. [Google Scholar] [CrossRef]
- Chuphal, M.; Singh, K.; Bisht, A.; Sharma, V.; Awasthi, S.; Vats, S. Anomaly Detection in Electro-Mechanical Devices Using MFCC. In Proceedings of the 2024 2nd International Conference on Disruptive Technologies (ICDT), Greater Noida, India, 15–16 March 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 986–991. [Google Scholar]
- Wu, Y.; Sicard, B.; Gadsden S, A. Physics-informed machine learning: A comprehensive review on applications in anomaly detection and condition monitoring. Expert Syst. Appl. 2024, 255, 124678. [Google Scholar] [CrossRef]
- Fan, J.; Ji, Y.; Wu, H.; Ge, Y.; Sun, D.; Wu, J. An unsupervised video anomaly detection method via Optical Flow decomposition and Spatio-Temporal feature learning. Pattern Recognit. Lett. 2024, 185, 239–246. [Google Scholar] [CrossRef]
- Liu, J.; Li, Q.; Li, L.; An, S. Structural damage detection and localization via an unsupervised anomaly detection method. Reliab. Eng. Syst. Saf. 2024, 252, 110465. [Google Scholar] [CrossRef]
- Li, W.; Shang, Z.; Zhang, J.; Gao, M.; Qian, S. A novel unsupervised anomaly detection method for rotating machinery based on memory augmented temporal convolutional autoencoder. Eng. Appl. Artif. Intell. 2023, 123, 106312. [Google Scholar] [CrossRef]
- Wu, S.; Fang, L.; Zhang, J.; Sriram, T.; Coshatt, S.; Zahiri, F.; Mantooth, A.; Ye, J.; Zhong, W.; Ma, P. Unsupervised anomaly detection and diagnosis in power electronic networks: Informative leverage and multivariate functional clustering approaches. IEEE Trans. Smart Grid 2023, 15, 2214–2225. [Google Scholar] [CrossRef]
- Wu, J.; Zhao, Z.; Sun, C.; Yan, R.; Chen, X. Fault-attention generative probabilistic adversarial autoencoder for machine anomaly detection. IEEE Trans. Ind. Inform. 2020, 16, 7479–7488. [Google Scholar] [CrossRef]
- Tian, H.; Kong, H.; Lu, S.; Li, K. Unsupervised anomaly detection of multivariate time series based on multi-standard fusion. Neurocomputing 2025, 611, 128634. [Google Scholar] [CrossRef]
- Li, L.; Qu, H.; Li, Z.; Zheng, J.; Tang, X.; Liu, P. Data reconstruction via consensus graph learning for effective anomaly detection in industrial IoT. IEEE Trans. Ind. Inform. 2023, 20, 3996–4006. [Google Scholar] [CrossRef]
- Guo, H.; Mu, Y.; Wang, L.; Liu, X.; Pedrycz, W. Granular computing-based time series anomaly pattern detection with semantic interpretation. Appl. Soft Comput. 2024, 167, 112318. [Google Scholar] [CrossRef]
- Fan, T.; Li, P.; Qi, Z.; Zhao, Z.; Fang, X.; Yan, B.; Zhao, R.; Liu, L.; Li, Y.; Fang, Z. Borehole transient electromagnetic stereo imaging method based on horizontal component anomaly feature clustering. J. Appl. Geophys. 2022, 197, 104537. [Google Scholar] [CrossRef]
- Tsiktsiris, D.; Lalas, A.; Dasygenis, M.; Votis, K. Enhancing the safety of autonomous vehicles: Semi-supervised anomaly detection with overhead fisheye perspective. IEEE Access 2024, 12, 68905–68915. [Google Scholar] [CrossRef]
- Campos-Romero, M.; Carranza-García, M.; Riquelme J, C. Advancing unsupervised anomaly detection with normalizing flow and multi-scale ensemble learning. Eng. Appl. Artif. Intell. 2024, 137, 109088. [Google Scholar] [CrossRef]
- Zhong, H.; Yu, S.; Trinh, H.; Lv, Y.; Yuan, R.; Wang, Y. Fine-tuning transfer learning based on DCGAN integrated with self-attention and spectral normalization for bearing fault diagnosis. Measurement 2023, 210, 112421. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, Y.; Hu, X.; Botta, N.; Ionescu, C.; Chen, G. Copod: Copula-based outlier detection. In Proceedings of the 2020 IEEE International Conference on Data Mining (ICDM), Sorrento, Italy, 17–20 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1118–1123. [Google Scholar]
- Mohammadrezaei, M.; Maleki, Z.; Tabesh, A.; Khajehoddin, S. A Framework for Normalizing Physical Features of Li-Ion Batteries to Form a Generic Health Estimation Model. IEEE Trans. Transp. Electrif. 2023, 10, 6880–6892. [Google Scholar] [CrossRef]
- Liu, S.; Zhou, B.; Ding, Q.; Hooi, B.; Zhang, Z.; Shen, H.; Chen, X. Time series anomaly detection with adversarial reconstruction networks. IEEE Trans. Knowl. Data Eng. 2022, 35, 4293–4306. [Google Scholar] [CrossRef]
- Sun, Y.; Li, S. Bearing fault diagnosis based on optimal convolution neural network. Measurement 2022, 190, 110702. [Google Scholar] [CrossRef]
- Chen, Q.; Dai, X.; Song, X.; Liu, G. ITSC fault diagnosis for five phase permanent magnet motors by attention mechanisms and multiscale convolutional residual network. IEEE Trans. Ind. Electron. 2023, 71, 9737–9746. [Google Scholar] [CrossRef]
- Song, X.; Chen, Y.; Xiao, Z.; Chen, Y. Analysis of BGA Lead-Free solder joints failure behavior based on thermal shock testing. Eng. Fail. Anal. 2024, 165, 108813. [Google Scholar] [CrossRef]
- Xia, X.; Pan, X.; Li, N.; He, X.; Ma, L.; Zhang, X.; Ding, N. GAN-based anomaly detection: A review. Neurocomputing 2022, 493, 497–535. [Google Scholar] [CrossRef]
- Lindstrom, M.R.; Jung, H.; Larocque, D. Functional kernel density estimation: Point and fourier approaches to time series anomaly detection. Entropy 2020, 22, 1363. [Google Scholar] [CrossRef]
- Liu, D.; Cui, L.; Cheng, W. A review on deep learning in planetary gearbox health state recognition: Methods, applications, and dataset publication. Meas. Sci. Technol. 2023, 35, 012002. [Google Scholar] [CrossRef]
- Han, B.; Yang, Z.; Zhang, Z.; Bao, H.; Wang, J.; Liu, Z.; Li, S. A novel rolling bearing fault diagnosis method based on generalized nonlinear spectral sparsity. Measurement 2022, 198, 111131. [Google Scholar] [CrossRef]
- Pang, J.; Pu, X.; Li, C. A hybrid algorithm incorporating vector quantization and one-class support vector machine for industrial anomaly detection. IEEE Trans. Ind. Inform. 2022, 18, 8786–8796. [Google Scholar] [CrossRef]
- Deng, C.; Deng, Z.; Lu, S.; He, M.; Miao, J.; Peng, Y. Fault diagnosis method for imbalanced data based on multi-signal fusion and improved deep convolution generative adversarial network. Sensors 2023, 23, 2542. [Google Scholar] [CrossRef] [PubMed]
- Tian, H.; Ju, B.; Feng, S. Reciprocating compressor health monitoring based on BSInformer with deep convolutional AutoEncoder. Measurement 2023, 222, 113575. [Google Scholar] [CrossRef]
- Gandhudi, M.; Alphonse, P.J.A.; Velayudham, V.; Nagineni, L.; G.R, G. Explainable causal variational autoencoders based equivariant graph neural networks for analyzing the consumer purchase behavior in E-commerce. Eng. Appl. Artif. Intell. 2024, 136, 108988. [Google Scholar] [CrossRef]
- Zhao, M.; Jia, X.; Lin, J.; Lei, Y.; Lee, J. Instantaneous speed jitter detection via encoder signal and its application for the diagnosis of planetary gearbox. Mech. Syst. Signal Process. 2018, 98, 16–31. [Google Scholar] [CrossRef]
- Jiao, J.; Zhao, M.; Lin, J.; Ding, C. Deep coupled dense convolutional network with complementary data for intelligent fault diagnosis. IEEE Trans. Ind. Electron. 2019, 66, 9858–9867. [Google Scholar] [CrossRef]
- Tu, D.; Zheng, J.; Jiang, Z.; Pan, H. Multiscale distribution entropy and t-distributed stochastic neighbor embedding-based fault diagnosis of rolling bearings. Entropy 2018, 20, 360. [Google Scholar] [CrossRef]
- Xu, J.; Zhou, L.; Zhao, W.; Fan, Y.; Ding, X.; Yuan, X. Zero-shot learning for compound fault diagnosis of bearings. Expert Syst. Appl. 2022, 190, 116197. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiments | Datasets | Tasks | Descriptions | Training Setup | Testing Setup |
|---|---|---|---|---|---|
| E1 | WT-Planetary Gearbox | A | Same position | Sensor position 1, healthy data | Sensor position 1, healthy + faulty data |
| B | Cross position | Sensor position 2, healthy + faulty data | |||
| E2 | SDUST Gear Dataset | C | Same operating conditions | Constant speed and load, healthy Data | Constant speed and load, healthy + faulty data |
| D | Cross operating conditions | Varying speed and load, healthy + faulty data |
| Heath States | Label | Task A | Task B | ||
|---|---|---|---|---|---|
| Training Samples | Test Samples | Training Samples | Test Samples | ||
| Health | 0 | 400 ※ | 100 ※ | 400 ※ | 100 * |
| Broken tooth | 1 | / | 100 ※ | / | 100 * |
| Wear | 2 | / | 100 ※ | / | 100 * |
| Crack | 3 | / | 100 ※ | / | 100 * |
| Missing tooth | 4 | / | 100 ※ | / | 100 * |
| Heath States | Label | Task C | Task D | |||
|---|---|---|---|---|---|---|
| Training Samples | Test Samples | Training Samples | Test Samples | |||
| Health | 0 | 400 ▲ | 100 ▲ | 400 ▲ | 100 ▼ | |
| Planetary gear | pitting | 1 | / | 100 ▲ | / | 100 ▼ |
| cracking | 2 | / | 100 ▲ | / | 100 ▼ | |
| wear | 3 | / | 100 ▲ | / | 100 ▼ | |
| Sun gear | pitting | 4 | / | 100 ▲ | / | 100 ▼ |
| cracking | 5 | / | 100 ▲ | / | 100 ▼ | |
| wear | 6 | / | 100 ▲ | / | 100 ▼ | |
| Methods | Description | Parameter Configurations |
|---|---|---|
| Method 1 | OCSVM | Epochs = 100, batchsize = 32, optimizer = ‘adam’, beta1 = 0.9, beta2 = 0.99, loss = ‘mse’, kenrnel = ‘rbf’, learning rate = 0.001, momentum = 0.95, epsilon = 0.0001, scheduler = ‘ReduceLROnPlateau’, marginal_estimation = ‘KDE’, bandwidth = ‘scott’. |
| Method 2 | CSVM | |
| Method 3 | VSVM | |
| Method 4 | GSVM |
| Model | Components | Description | Filters | Kernel/Pool Size | Stride | Shape |
|---|---|---|---|---|---|---|
| G | Input | / | / | / | / | 3072 × 1 |
| Block 1 | Conv 1D + Maxpooling 1D | 32 (32) | 3 (2) | 1 (2) | 1536 × 32 | |
| Block 2 | Conv 1D + Maxpooling 1D | 16 (16) | 3 (2) | 1 (2) | 768 × 16 | |
| Block 3 | Conv 1D + Maxpooling 1D | 8 (8) | 3 (2) | 1 (2) | 384 × 8 | |
| Block 4 | Conv 1D + Maxpooling 1D | 4 (4) | 3 (2) | 1 (2) | 192 × 4 | |
| Block 5 | Conv 1D + Maxpooling 1D | 2 (2) | 3 (2) | 1 (2) | 96 × 2 | |
| Block 6 | Conv 1D + UpSampling 1D | 2 (/) | 3 (2) | 1 (/) | 192 × 2 | |
| Block 7 | Conv 1D + UpSampling 1D | 4 (/) | 3 (2) | 1 (/) | 384 × 4 | |
| Block 8 | Conv 1D + UpSampling 1D | 8 (/) | 3 (2) | 1 (/) | 768 × 8 | |
| Block 9 | Conv 1D + UpSampling 1D | 16 (/) | 3 (2) | 1 (/) | 1536 × 16 | |
| Block 10 | Conv 1D + UpSampling 1D | 32 (/) | 3 (2) | 1 (/) | 3072 × 32 | |
| Block 11 | Conv 1D | 1 | 3 | 1 | 3072 × 1 | |
| D | Input | / | / | / | / | 3072 × 1 |
| Block 1 | Conv 1D + Maxpooling 1D | 32 (32) | 3 (2) | 1 (2) | 1536 × 32 | |
| Block 2 | Conv 1D + Maxpooling 1D | 16 (16) | 3 (2) | 1 (2) | 768 × 16 | |
| Block 3 | Conv 1D + Maxpooling 1D | 8 (8) | 3 (2) | 1 (2) | 384 × 8 | |
| Block 4 | Conv 1D + Maxpooling 1D | 4 (4) | 3 (2) | 1 (2) | 192 × 4 | |
| Block 5 | Conv 1D + Maxpooling 1D | 2 (2) | 3 (2) | 1 (2) | 96 × 2 | |
| Block 6 | Flatten | / | / | / | 192 | |
| Block 7 | Dense | / | / | / | 1 |
| Models | Task A | Task B | ||||
|---|---|---|---|---|---|---|
| Correctly Detected Samples | Total Samples | Accuracy (%) | Correctly Detected Samples | Total Samples | Accuracy (%) | |
| Method 1 | 440 | 500 | 88.0 | 420 | 500 | 84.0 (4.0) |
| Method 2 | 455 | 500 | 91.0 | 432 | 500 | 86.4 (4.6) |
| Method 3 | 460 | 500 | 92.0 | 438 | 500 | 87.6 (4.4) |
| Method 4 | 482 | 500 | 96.4 | 440 | 500 | 88.0 (8.4) |
| Proposed method | 493 | 500 | 98.6 | 488 | 500 | 97.6 (1.0) |
| Models | Task C | Task D | ||||
|---|---|---|---|---|---|---|
| Correctly Detected Samples | Total Samples | Accuracy (%) | Correctly Detected Samples | Total Samples | Accuracy (%) | |
| Method 1 | 418 | 500 | 83.6 [4.4] | 381 | 500 | 76.2 {7.4} |
| Method 2 | 444 | 500 | 88.8 [2.2] | 409 | 500 | 81.8 {7.0} |
| Method 3 | 443 | 500 | 88.6 [3.4] | 412 | 500 | 82.4 {6.2} |
| Method 4 | 465 | 500 | 93.0 [3.4] | 428 | 500 | 85.6 {7.4} |
| Proposed method | 490 | 500 | 98.0 [0.6] | 468 | 500 | 94.8 {3.2} |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, B.; Li, Y.; Yin, G. DCCopGAN: Deep Convolutional Copula-GAN for Unsupervised Multi-Sensor Anomaly Detection in Industrial Gearboxes. Electronics 2025, 14, 2631. https://doi.org/10.3390/electronics14132631
Ge B, Li Y, Yin G. DCCopGAN: Deep Convolutional Copula-GAN for Unsupervised Multi-Sensor Anomaly Detection in Industrial Gearboxes. Electronics. 2025; 14(13):2631. https://doi.org/10.3390/electronics14132631
Chicago/Turabian StyleGe, Bowei, Ye Li, and Guangqiang Yin. 2025. "DCCopGAN: Deep Convolutional Copula-GAN for Unsupervised Multi-Sensor Anomaly Detection in Industrial Gearboxes" Electronics 14, no. 13: 2631. https://doi.org/10.3390/electronics14132631
APA StyleGe, B., Li, Y., & Yin, G. (2025). DCCopGAN: Deep Convolutional Copula-GAN for Unsupervised Multi-Sensor Anomaly Detection in Industrial Gearboxes. Electronics, 14(13), 2631. https://doi.org/10.3390/electronics14132631