
Fast-Balancing Passive Battery Management System with Remote Monitoring for the Automotive Industry



Abstract
1. Introduction
1.1. Literature Survey
1.2. Motivation
- -
- Implementation of passive balancing at 750 mA, significantly higher than previous designs.
- -
- Remote CAN-based monitoring integration in a low-cost passive BMS, characteristics that are missing from the previous designs.
- -
- Low measurement error (<0.12%) in voltage monitoring, which is extremely low and outperforms most of the previous works.
- -
- Modular design enabling expansion to higher cell counts.
1.3. Paper Structure
2. Materials and Methods
2.1. LiFePO4 Cell
2.2. Cell Voltage Monitoring Circuit
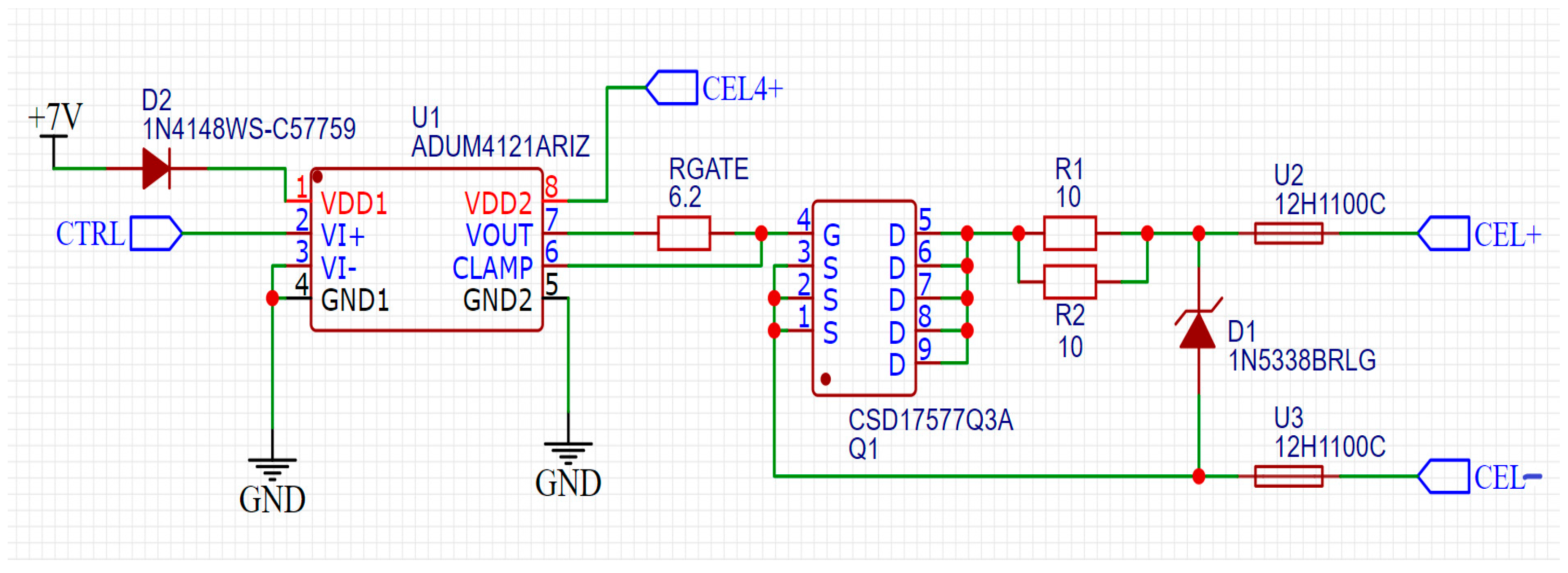
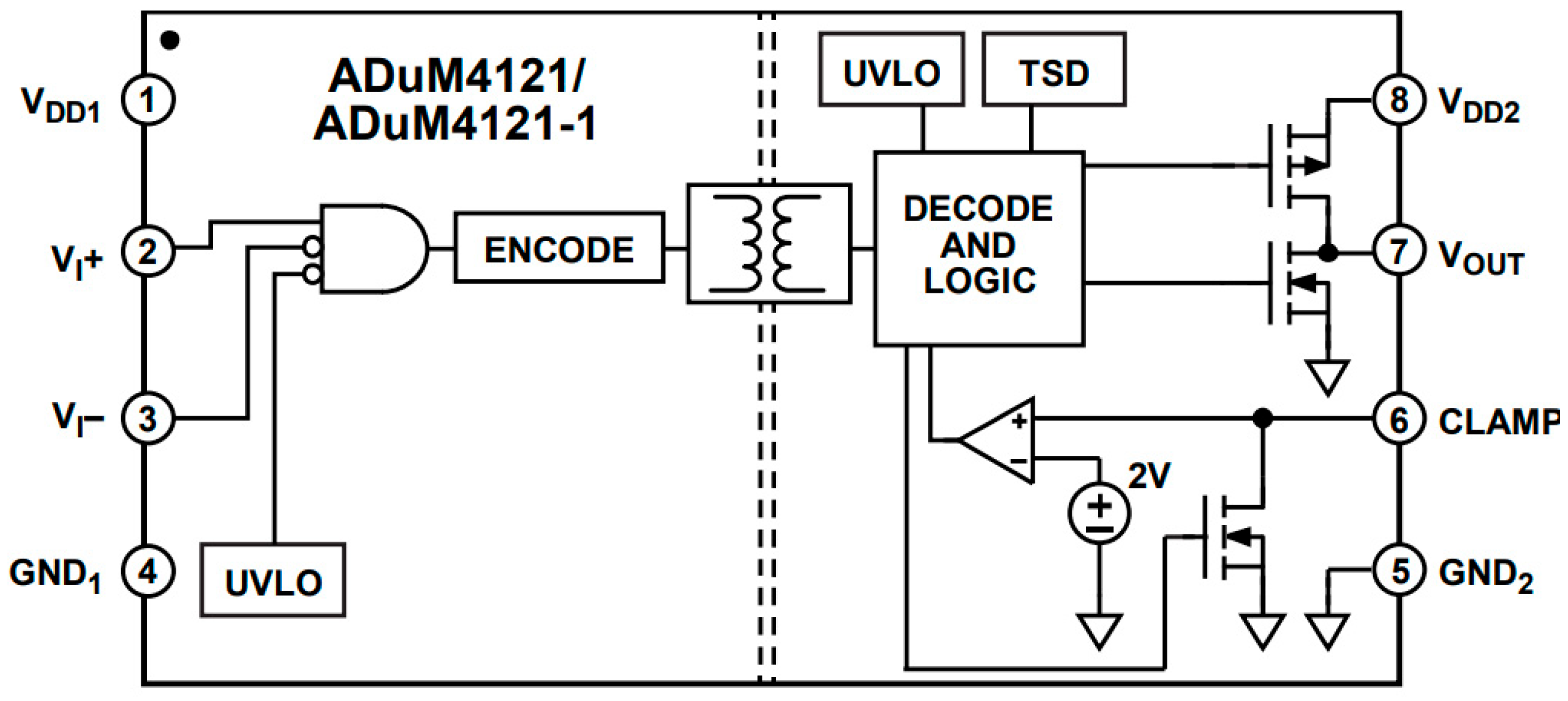
2.3. Cell-Balancing Circuit
2.4. Power Supply Circuit
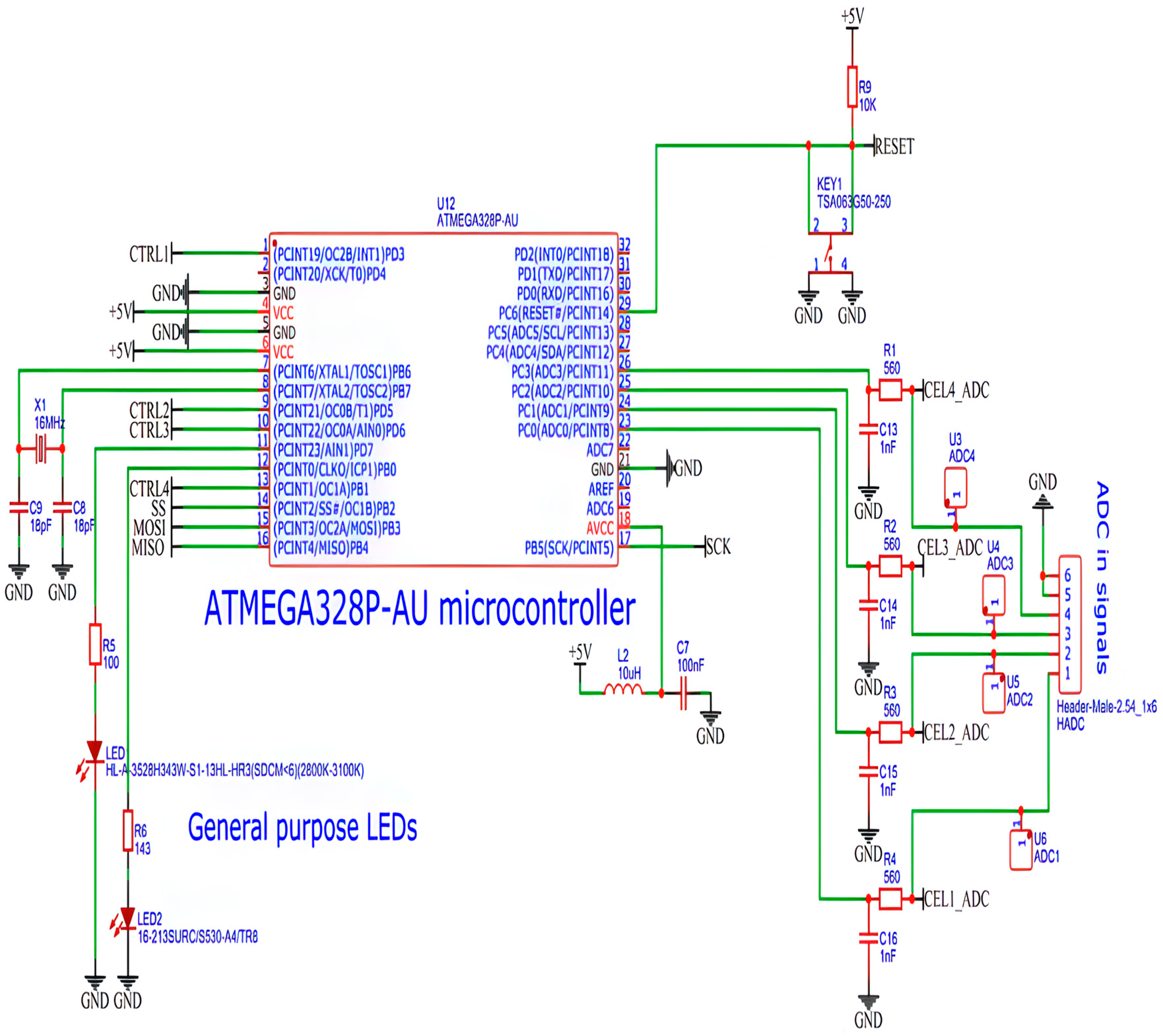
2.5. Microcontroller Circuit
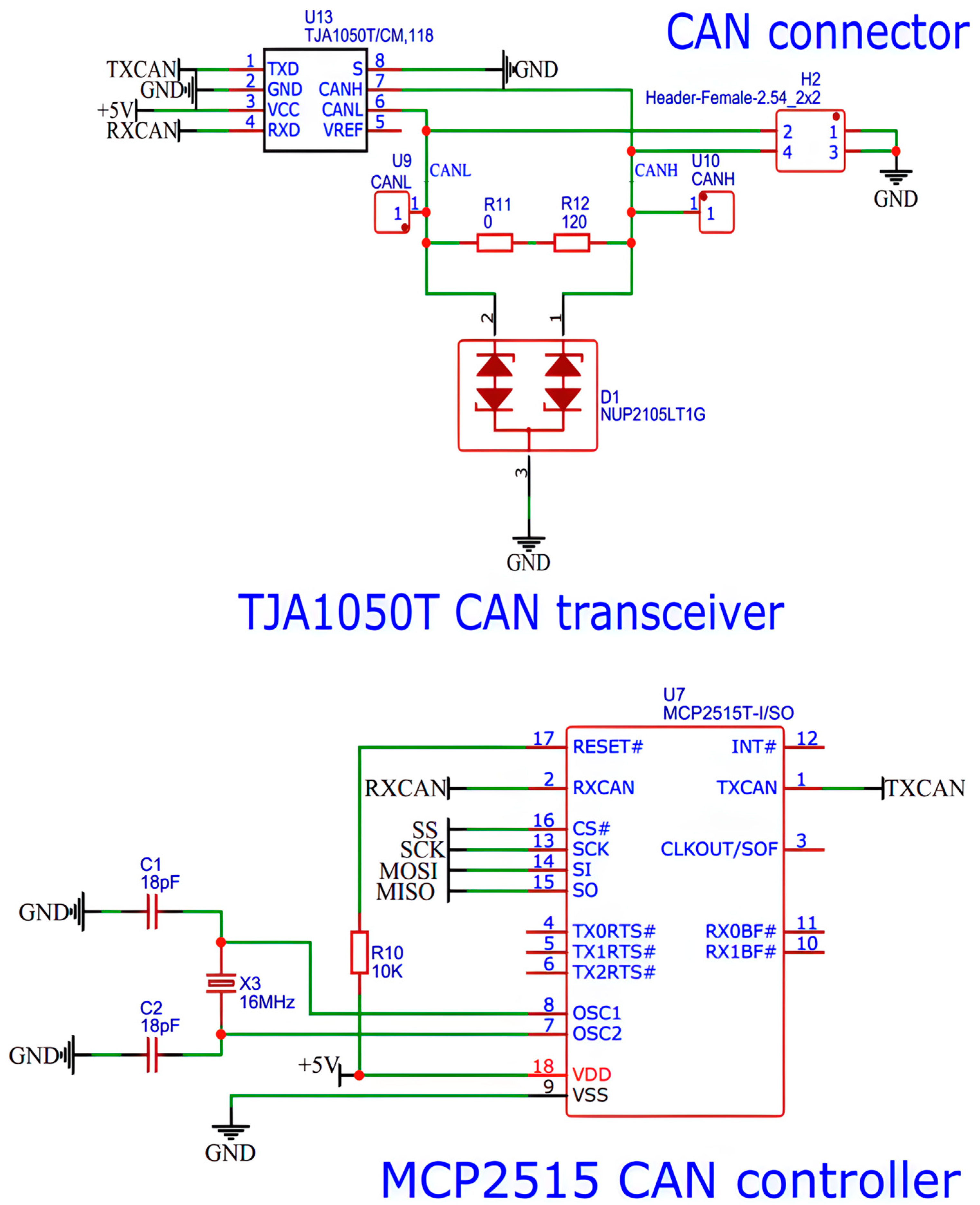
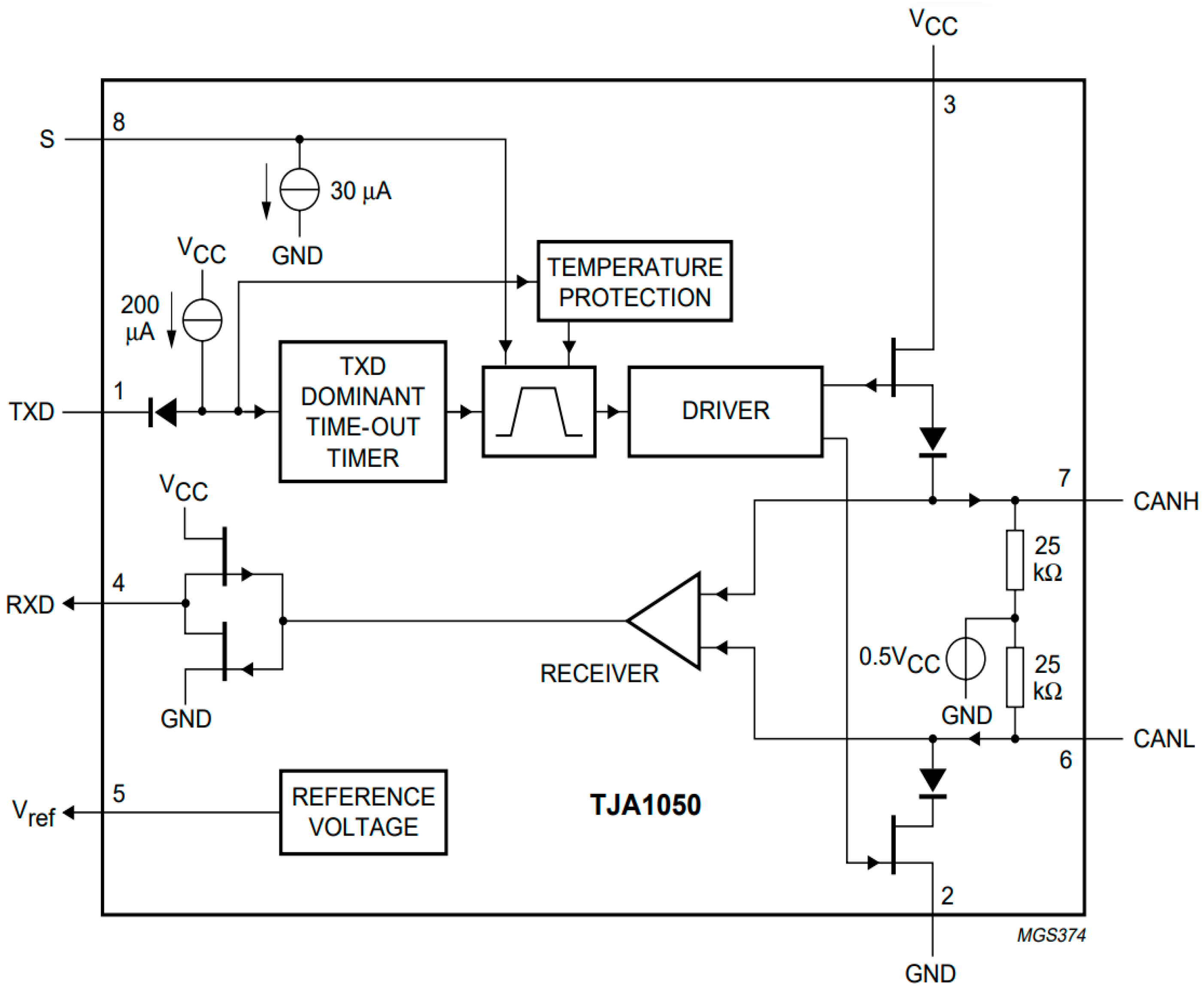
2.6. CAN Interface Circuit
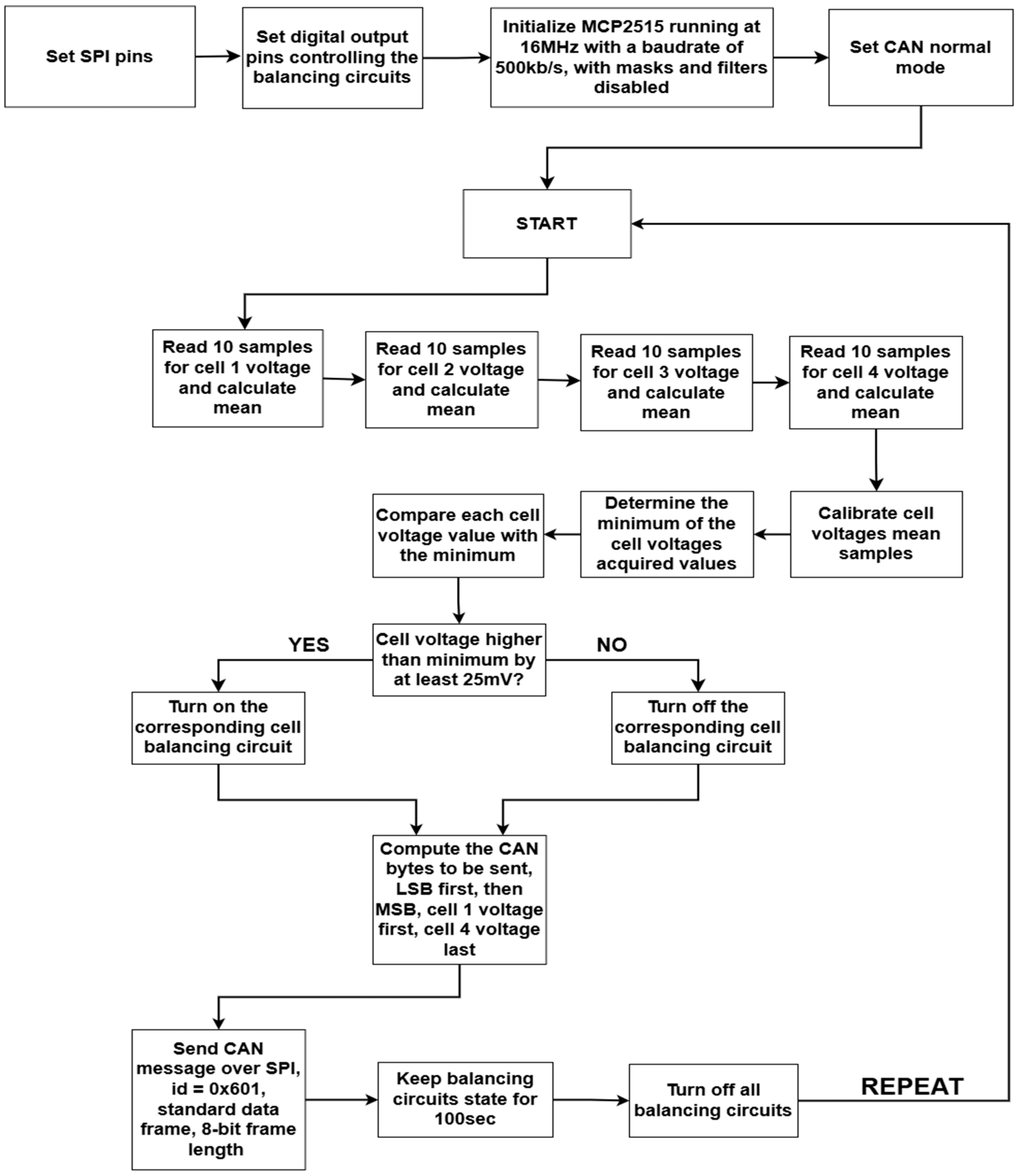
2.7. Software Implementation
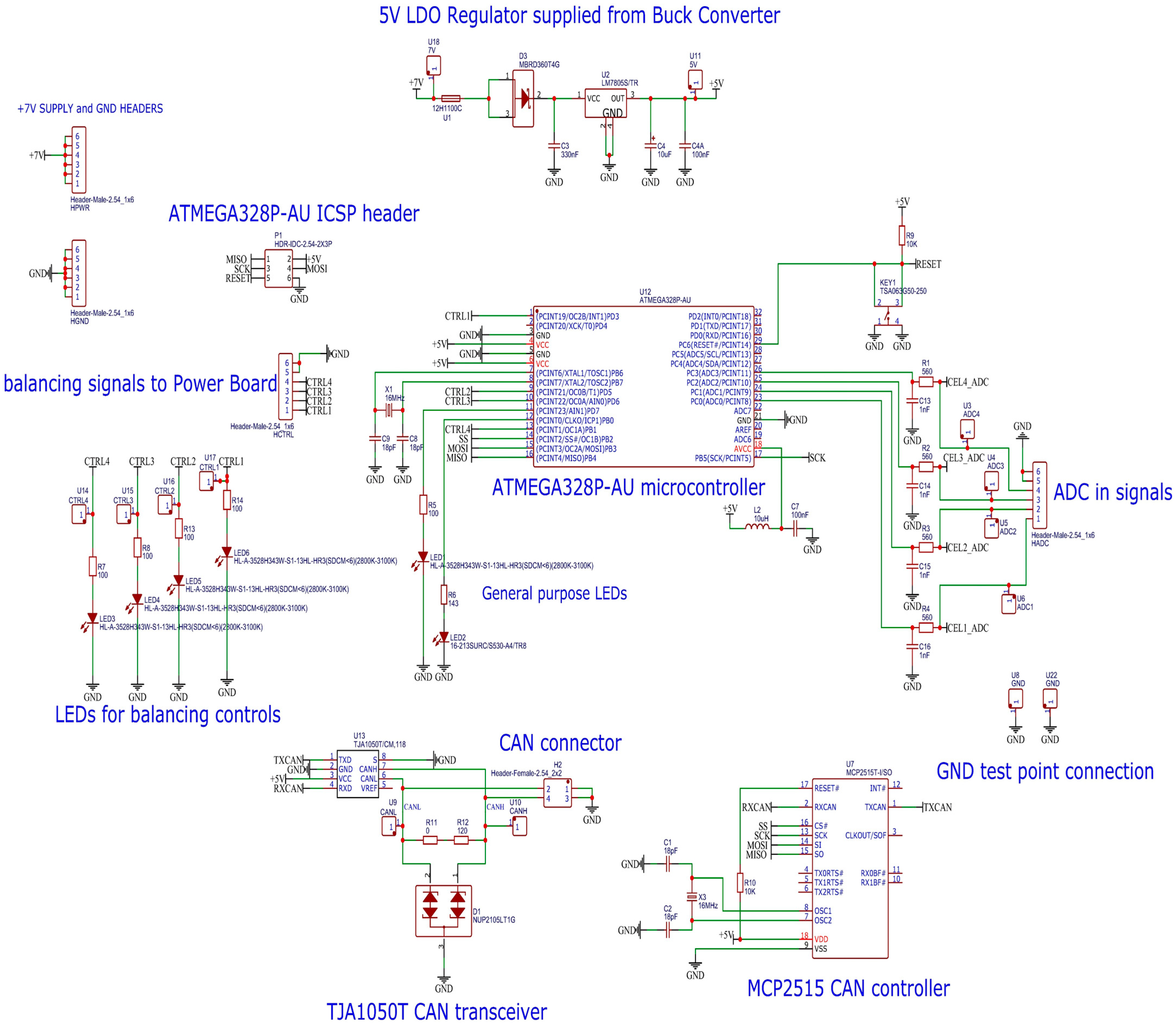
2.8. Full Schematic of the Proposed Battery Management System
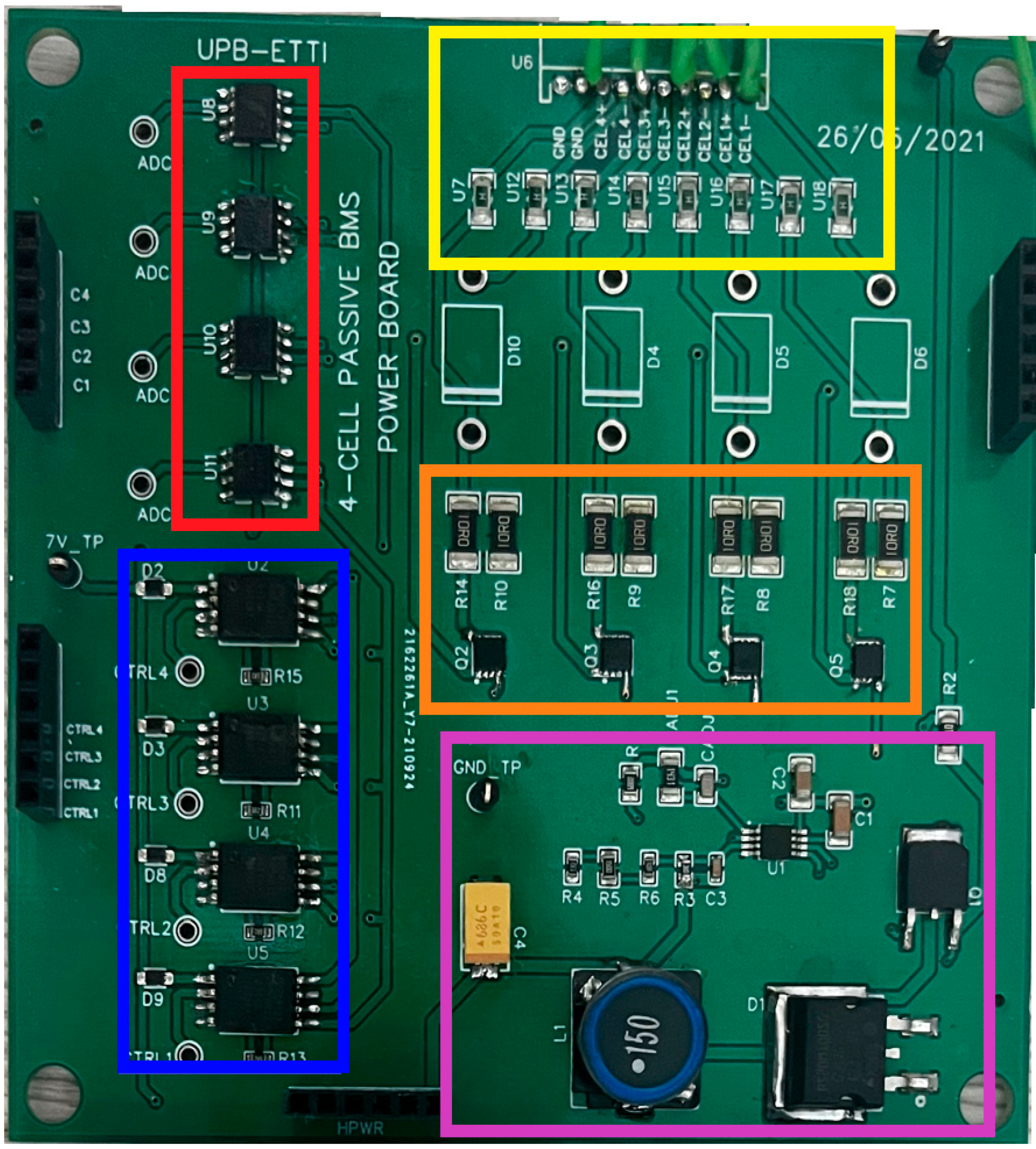
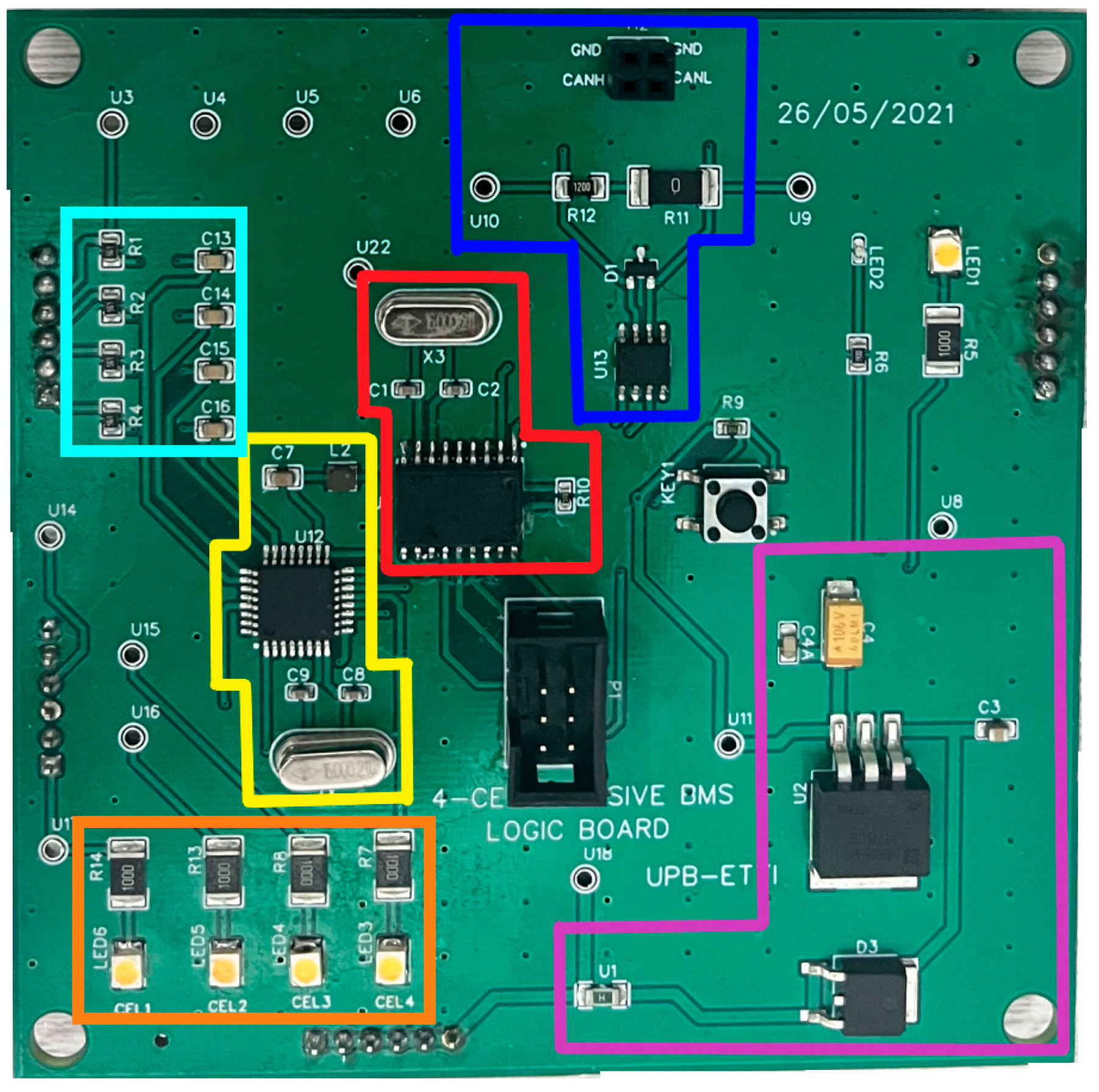
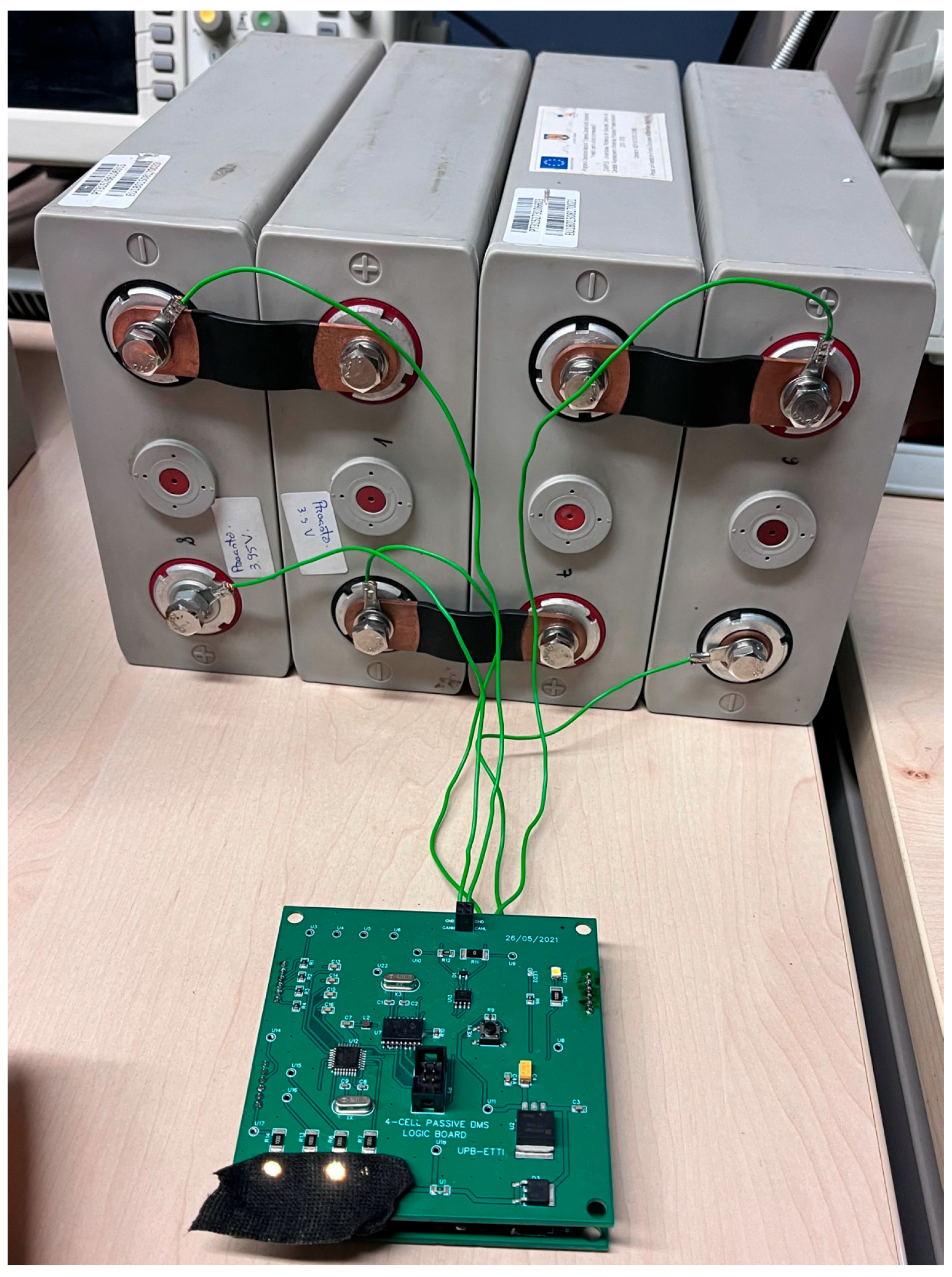
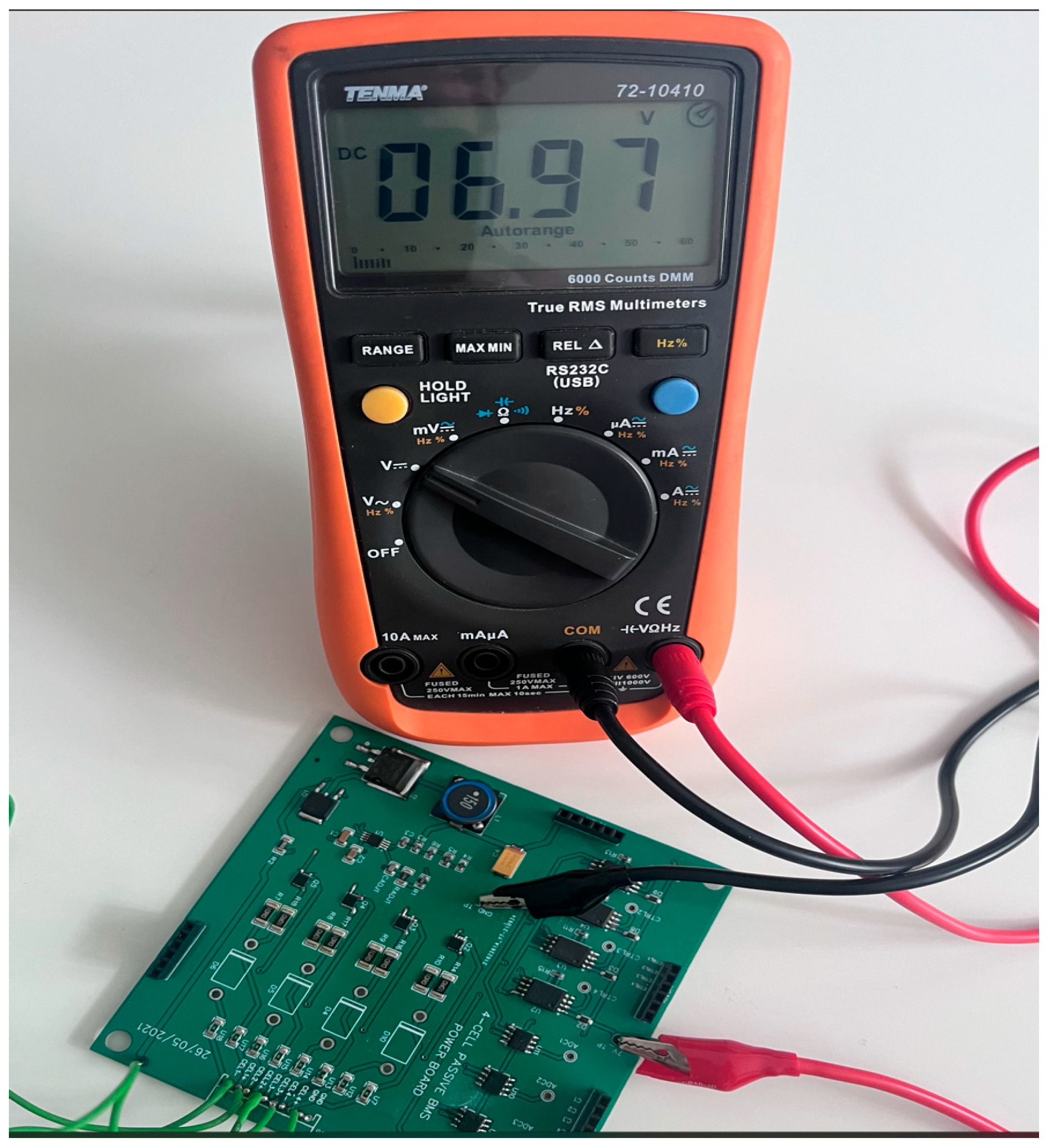
2.9. Printed Circuit Boards of the Proposed Battery Management System
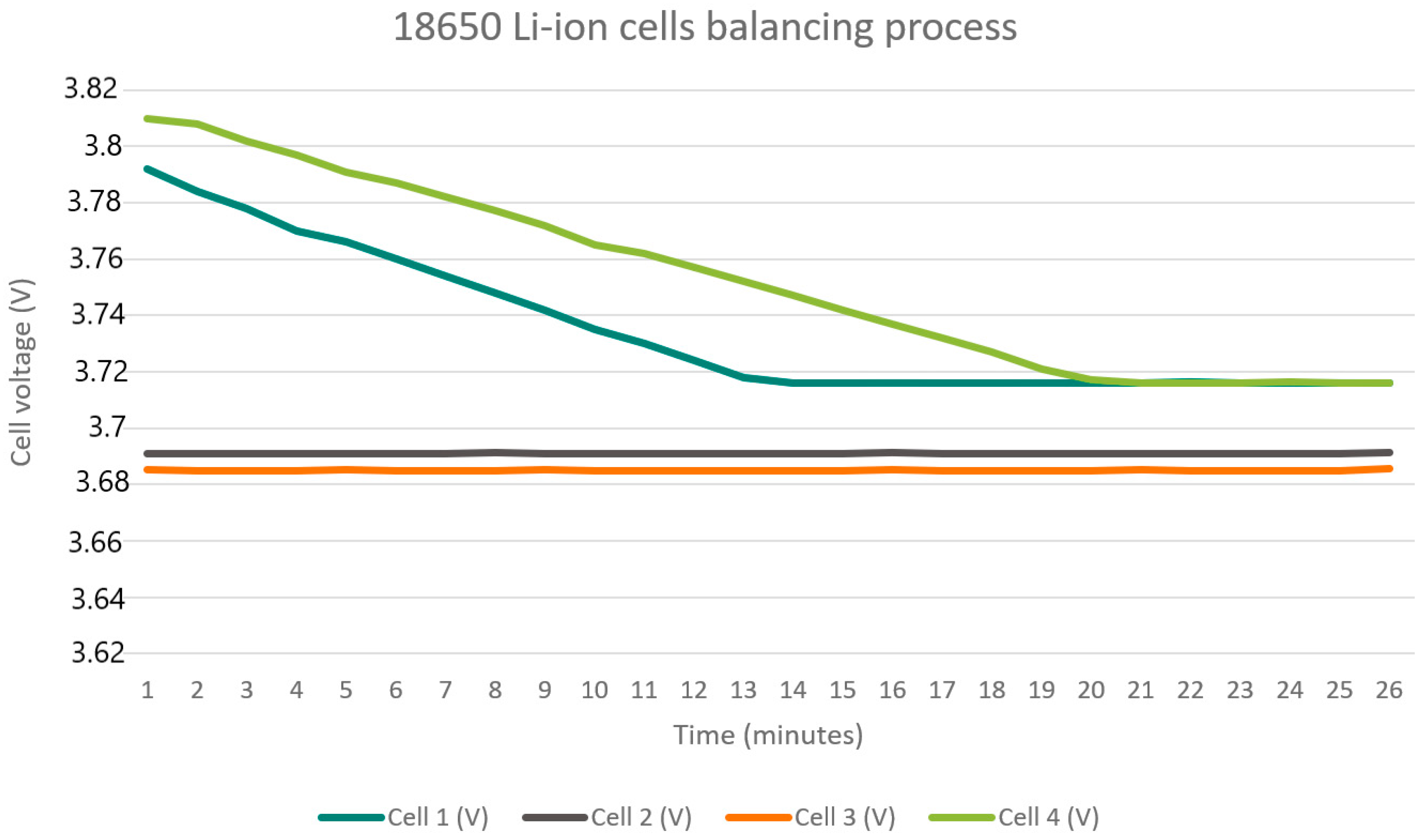
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | Analog-to-Digital Converter |
| BMS | Battery Management System |
| CALB | China Aviation Lithium Battery Limited |
| CAN | Controller Area Network |
| CMOS | Complementary Metal–Oxide–Semiconductor |
| CRC | Cyclic Redundancy Check |
| DC-DC | Direct Current–Direct Current |
| DSP | Digital Signal Processor |
| EMI | Electromagnetic Interference |
| ESD | Electrostatic Discharge |
| EV | Electric Vehicle |
| HEV | Hybrid Electric Vehicle |
| ICA | Incremental Capacity Analysis |
| LDO | Low Dropout Voltage Regulator |
| LED | Light-Emitting Diode |
| Li | Lithium |
| LiFePO4 | Lithium Iron Phosphate |
| MOSFET | Metal–Oxide–Semiconductor Field-Effect Transistor |
| OCV | Open-Circuit Voltage |
| PCB | Printed Circuit Board |
| PID | Proportional–Integral–Derivative |
| PMOS | P-Channel Metal–Oxide–Semiconductor |
| SOC | State of Charge |
| SOH | State of Health |
| SPI | Serial Peripheral Interface |
| TQFP | Thin Quad Flat Pack |
| UVLO | Undervoltage-Lockout |
References
- Milas, N.T.; Tatakis, E.C. Fast Battery Cell Voltage Equalizer Based on the Bidirectional Flyback Converter. IEEE Trans. Transp. Electrif. 2023, 9, 4922–4940. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Y.; Qi, H.; Zhang, J. Active Battery Equalization Method Based on Redundant Battery for Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 7531–7543. [Google Scholar] [CrossRef]
- Zhou, Z.; Duan, B.; Kang, Y.; Zhang, Q.; Shang, Y.; Zhang, C. Online State of Health Estimation for Series Connected LiFePO4 Battery Pack Based on Differential Voltage and Inconsistency Analysis. IEEE Trans. Transp. Electrif. 2023, 10, 989–998. [Google Scholar] [CrossRef]
- Xia, T.; Xia, X.; Yue, J.; Gong, Y.; Tan, J.; Wen, L. Research on Estimation Optimization of State of Charge of Lithium-Ion Batteries Based on Kalman Filter Algorithm. Electronics 2025, 14, 1462. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; Wang, J.; He, H.; Peng, S.; Pecht, M. Lithium-Ion Battery Health Prognosis Based on a Real Battery Management System Used in Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 4110–4121. [Google Scholar] [CrossRef]
- Lu, X.; Qiu, J.; Lei, G.; Zhu, J. Degradation Mode Knowledge Transfer Method for LFP Batteries. IEEE Trans. Transp. Electrif. 2023, 9, 1142–1152. [Google Scholar] [CrossRef]
- Liu, K.; Li, Y.; Hu, X.; Lucu, M.; Widanage, W.D. Gaussian process regression with automatic relevance determination kernel for calendar aging prediction of Lithium-Ion batteries. IEEE Trans. Ind. Inform. 2019, 16, 3767–3777. [Google Scholar] [CrossRef]
- Liu, Y.; Han, L.; Wang, Y.; Zhu, J.; Zhang, B.; Guo, J. An Evolutionary Deep Learning Framework for Accurate Remaining Capacity Prediction in Lithium-Ion Batteries. Electronics 2025, 14, 400. [Google Scholar] [CrossRef]
- Park, S.; Pozzi, A.; Whitmeyer, M.; Perez, H.; Kandel, A.; Kim, G.; Choi, Y.; Joe, W.T.; Raimondo, D.M.; Moura, S. A deep reinforcement learning framework for fast charging of Li-Ion batteries. IEEE Trans. Transp. Electrif. 2022, 8, 2770–2784. [Google Scholar] [CrossRef]
- Farakhor, A.; Wu, D.; Wang, Y.; Fang, H. A novel modular, reconfigurable battery energy storage System: Design, control, and experimentation. IEEE Trans. Transp. Electrif. 2022, 9, 2878–2890. [Google Scholar] [CrossRef]
- Hamednia, A.; Hanson, V.; Zhao, J.; Murgovski, N.; Forsman, J.; Pourabdollah, M.; Larsson, V.; Fredriksson, J. Charge planning and thermal management of battery electric vehicles. IEEE Trans. Veh. Technol. 2023, 72, 14141–14154. [Google Scholar] [CrossRef]
- Liu, M.; Li, W.; Wang, C.; Polis, M.P.; Wang, L.Y.; Li, J. Reliability evaluation of large scale battery energy storage systems. IEEE Trans. Smart Grid 2016, 8, 2733–2743. [Google Scholar] [CrossRef]
- Vidal, C.; Gross, O.; Gu, R.; Kollmeyer, P.; Emadi, A. XEV Li-Ion Battery Low-Temperature Effects—Review. IEEE Trans. Veh. Technol. 2019, 68, 4560–4572. [Google Scholar] [CrossRef]
- Canilang, H.M.O.; Caliwag, A.C.; Lim, W. Design of modular BMS and Real-Time Practical implementation for electric Motorcycle application. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 519–523. [Google Scholar] [CrossRef]
- Pattnaik, T.; Garg, A.; Verma, S.R.; Ballal, M.S.; Wath, M.G.; Wakode, S.A. Design of a Basic BMS: A Warning System. In Proceedings of the 2023 5th Biennial International Conference on Nascent Technologies in Engineering (ICNTE), Navi Mumbai, India, 20–21 January 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Li, Y.; Yin, P.; Chen, J. Active Equalization of Lithium-Ion Battery Based on Reconfigurable Topology. Appl. Sci. 2023, 13, 1154. [Google Scholar] [CrossRef]
- Zong, Y.; Li, K.; Wang, Q.; Meng, J. Multi-Mode Lithium-Ion Battery Balancing Circuit Based on Forward Converter with Resonant Reset. Appl. Sci. 2023, 13, 10430. [Google Scholar] [CrossRef]
- Dalvi, S.; Thale, S. Design of DSP Controlled Passive Cell Balancing Network based Battery Management System for EV Application. In Proceedings of the 2020 IEEE India Council International Subsections Conference (INDISCON), Visakhapatnam, India, 3–4 October 2020; pp. 84–89. [Google Scholar] [CrossRef]
- Di Monaco, M.; Porpora, F.; Tomasso, G.; D’Arpino, M.; Attaianese, C. Design Methodology for Passive Balancing Circuit including Real Battery Operating Conditions. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; pp. 467–471. [Google Scholar] [CrossRef]
- Nath, A.; Rajpathak, B. Analysis of cell balancing techniques in BMS for electric vehicle. In Proceedings of the 2022 International Conference on Intelligent Controller and Computing for Smart Power (ICICCSP), Hyderabad, India, 21–23 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Kumar, M.; Yadav, V.K.; Mathuriya, K.; Verma, A.K. A Brief Review on Cell Balancing for Li-ion Battery Pack (BMS). In Proceedings of the 2022 IEEE 10th Power India International Conference (PIICON), New Delhi, India, 25–27 November 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Karmakar, S.; Bohre, A.K.; Bera, T.K. Novel PID Controller-Based Passive Cell Balancing for BMS. In Proceedings of the 2023 IEEE 3rd International Conference on Smart Technologies for Power, Energy and Control (STPEC), Bhubaneswar, India, 10–13 December 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Song, H.; Lee, S. Study on the Systematic Design of a Passive Balancing Algorithm Applying Variable Voltage Deviation. Electronics 2023, 12, 2587. [Google Scholar] [CrossRef]
- Miranda, J.P.D.; Barros, L.A.M.; Pinto, J.G. A Review on Power Electronic Converters for Modular BMS with Active Balancing. Energies 2023, 16, 3255. [Google Scholar] [CrossRef]
- Dinh, M.-C.; Le, T.-T.; Park, M. A Low-Cost and High-Efficiency Active Cell-Balancing Circuit for the Reuse of EV Batteries. Batteries 2024, 10, 61. [Google Scholar] [CrossRef]
- CALB CA180 LiFePO4 Battery. Available online: https://www.evlithium.com/CALB_Battery/122.html (accessed on 9 March 2024).
- Guran, I.; Florescu, A.; Perişoară, L.A. SPICE model of a passive battery management system. IEEE Access 2024, 12, 4000–4014. [Google Scholar] [CrossRef]
- Datasheet INA149, High Common-Mode Voltage Difference Amplifier, SBOS579B, September 201, Revised July 2012, Texas Instruments. Available online: https://www.ti.com/lit/gpn/INA149 (accessed on 9 March 2024).
- Datasheet ADuM4121/ADuM4121-1, High Voltage, Isolated Gate Driver with Internal Miller Clamp, 2 A Output, Rev. 0, 2016, Analog Devices. Available online: https://www.analog.com/en/products/adum4121-1.html (accessed on 9 March 2024).
- Datasheet CSD17577Q3A, CSD17577Q3A 30 V N-Channel NexFET™ Power MOSFET, SLPS515A, August 2014, revised January 2016, Texas Instruments. Available online: https://www.ti.com/lit/gpn/CSD17577Q3A (accessed on 9 March 2024).
- Datasheet 1N5333B Series, 5-Watt SurmeticTM 40 Zener Voltage regulators, May 2006, Rev. 7, ON Semiconductor. Available online: https://www.onsemi.com/download/data-sheet/pdf/1n5333b-d.pdf (accessed on 9 March 2024).
- Datasheet LM5085-Q1, LM5085/-Q1 75-V Constant On-Time PFET Buck Switching Controller, November 2008, Revised August 2015, Texas Instruments. Available online: https://www.ti.com/lit/gpn/LM5085 (accessed on 9 March 2024).
- Datasheet FDD5614P, FDD5614P 60V P-Channel PowerTrench® MOSFET, March 2015, Rev. 1.4, ON Semiconductor. Available online: https://www.onsemi.com/pdf/datasheet/fdd5614p-d.pdf (accessed on 9 March 2024).
- Datasheet STPS20M100S, 100V, 20A Power Schottky Rectifier, February 2019, Rev. 5, STMicroelectronics. Available online: https://kr.rs-online.com/web/p/schottky-diodes-rectifiers/2387454 (accessed on 9 March 2024).
- Datasheet LM7805S, LM340, LM340A and LM7805 Family Wide VIN 1.5-A Fixed Voltage Regulator, February 2000, Revised September 2016, Texas Instruments. Available online: https://www.ti.com/lit/ds/symlink/lm340.pdf (accessed on 9 March 2024).
- Datasheet MBRD360T4G, MBRD320, MBRD330, MBRD340, MBRD350, MBRD360 SWITCHMODETM Power Rectifiers, December 2004, Rev. 4, ON Semiconductor. Available online: https://media.distrelec.com/Web/Downloads/g_/ds/mbrd340t4g_eng_ds.pdf (accessed on 9 March 2024).
- Datasheet ATMEGA328P-AU, ATmega328P 8-bit AVR Microcontroller with 32K Bytes In-System Programmable Flash, 2015, Rev. 7810D–AVR–01/15, Atmel Corporation. Available online: https://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-7810-Automotive-Microcontrollers-ATmega328P_Datasheet.pdf (accessed on 9 March 2024).
- Datasheet MCP2515, Stand-Alone CAN Controller with SPI Interface, 08/15/18, Microchip Technology. Available online: https://ww1.microchip.com/downloads/en/DeviceDoc/MCP2515-Stand-Alone-CAN-Controller-with-SPI-20001801J.pdf (accessed on 9 March 2024).
- Datasheet TJA1050T, High Speed CAN Transceiver, 22 October 2003, Philips Semiconductors. Available online: https://www.nxp.com/docs/en/data-sheet/TJA1050.pdf (accessed on 9 March 2024).
- Datasheet NUP2105LT1G, Dual Line CAN Bus Protector, September 2004, Rev. 1, ON Semiconductor. Available online: https://www.onsemi.com/download/data-sheet/pdf/nup2105l-d.pdf (accessed on 9 March 2024).
- Xie, J.; Yao, T. Quantified assessment of internal Short-Circuit state for 18 650 batteries using an extreme Learning Machine-Based Pseudo-Distributed model. IEEE Trans. Transp. Electrif. 2021, 7, 1303–1313. [Google Scholar] [CrossRef]
- Park, C.H.; Kim, Y.; Jo, J. A secure communication method for CANBus. In Proceedings of the 2022 IEEE 12th Annual Computing and Communication Workshop and Conference (CCWC), Virtual, 27–30 January 2021; pp. 773–778. [Google Scholar] [CrossRef]
- Nizam, M.; Maghfiroh, H.; Rosadi, R.A.; Kusumaputri, K.D.U. Design of Battery Management System (BMS) for Lithium Iron Phosphate (LFP) Battery. In Proceedings of the 2019 6th International Conference on Electric Vehicular Technology (ICEVT), Bali, Indonesia, 18–21 November 2019; pp. 170–174. [Google Scholar] [CrossRef]
- Xu, Y.; Jiang, S.; Zhang, T.X. Research and design of lithium battery management system for electric bicycle based on Internet of things technology. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 1121–1125. [Google Scholar] [CrossRef]
- Ramelan, A.; Abada, F.; Nizam, M.; Adriyanto, F.; Sulistyo, M.E.; Apribowo, C.H.B.; Latifah, A. Design and Simulation of The Multistage Constant-Current Charging System with Passive Balancing BMS for Lithium-Ion Batteries. In Proceedings of the 2022 International Conference on ICT for Smart Society (ICISS), Bandung, Indonesia, 10–11 August 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Ning, B.; Han, Q.-L.; Zuo, Z.; Jin, J.; Zheng, J. Collective Behaviors of Mobile Robots Beyond the Nearest Neighbor Rules with Switching Topology. IEEE Trans. Cybern. 2018, 48, 1577–1590. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value |
|---|---|
| Nominal capacity @ 0.3C | 180 Ah |
| Nominal voltage | 3.2 V |
| Internal impedance @ 1 kHz AC | ≤0.6 mΩ |
| Life cycle @ 0.3C, 80% DOD | 2000 cycles |
| Weight | 5.7 kg |
| Maximum charging current | 180 A |
| Maximum discharging current | 360 A |
| Charging cut-off voltage | 3.65 V |
| Discharging cut-off voltage | 2.5 V |
| SOC usage range | 10–90% |
| Charging temperature range | 0–45 °C |
| Discharging temperature range | −20–55 °C |
| Storage temperature range | −20–20 °C |
| Measurement | Cell 1 | Cell 2 | Cell 3 | Cell 4 |
|---|---|---|---|---|
| Actual voltage | 3.396 V | 3.284 V | 3.348 V | 3.299 V |
| Output of the voltage monitoring circuit before calibration | 3.357 V | 3.269 V | 3.313 V | 3.289 V |
| Cell voltage acquired by microcontroller before calibration | 3.354 V | 3.266 V | 3.310 V | 3.286 V |
| Relative error before calibration | 1.23% | 0.54% | 1.13% | 0.4% |
| Software correction | +9 LSB | +4 LSB | +8 LSB | +3 LSB |
| Voltage correction | 43.947 mV | 19.532 mV | 39.064 mV | 14.649 mV |
| Cell voltage acquired by microcontroller after calibration | 3.397 V | 3.285 V | 3.349 V | 3.3 V |
| Measurement | Cell 1 | Cell 2 | Cell 3 | Cell 4 |
|---|---|---|---|---|
| Actual cell voltage | 3.389 V | 3.284 V | 3.343 V | 3.299 V |
| 3.377 V | 3.284 V | 3.332 V | 3.297 V | |
| 3.338 V | 3.283 V | 3.327 V | 3.297 V | |
| 3.312 V | 3.283 V | 3.316 V | 3.297 V | |
| Output of the voltage monitoring circuit before calibration | 3.393 V | 3.285 V | 3.345 V | 3.3 V |
| 3.379 V | 3.285 V | 3.335 V | 3.3 V | |
| 3.34 V | 3.285 V | 3.33 V | 3.3 V | |
| 3.315 V | 3.285 V | 3.32 V | 3.3 V | |
| Relative error of the voltage measurement | 0.11% | 0.03% | 0.06% | 0.03% |
| 0.06% | 0.03% | 0.09% | 0.09% | |
| 0.06% | 0.06% | 0.09% | 0.09% | |
| 0.09% | 0.06% | 0.12% | 0.09% |
| Measurement | Cell 1 | Cell 3 |
|---|---|---|
| Ibalancing,theoretical | 679.2 mA | 669.6 mA |
| 677.8 mA | 668.6 mA | |
| 675.5 mA | 666.4 mA | |
| 667.6 mA | 665.4 mA | |
| 662.4 mA | 663.2 mA | |
| Ibalancing,measured | 672.4 mA | 661.63 mA |
| 671.36 mA | 660.84 mA | |
| 667.93 mA | 658.46 mA | |
| 661.12 mA | 657.21 mA | |
| 655.57 mA | 655.37 mA | |
| Relative error of the balancing current | 1% | 1.19% |
| 0.95% | 1.16% | |
| 1.12% | 1.19% | |
| 0.97% | 1.23% | |
| 1.03% | 1.18% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guran, I.-C.; Florescu, A.; Bizon, N.; Perișoară, L.A. Fast-Balancing Passive Battery Management System with Remote Monitoring for the Automotive Industry. Electronics 2025, 14, 2606. https://doi.org/10.3390/electronics14132606
Guran I-C, Florescu A, Bizon N, Perișoară LA. Fast-Balancing Passive Battery Management System with Remote Monitoring for the Automotive Industry. Electronics. 2025; 14(13):2606. https://doi.org/10.3390/electronics14132606
Chicago/Turabian StyleGuran, Ionuț-Constantin, Adriana Florescu, Nicu Bizon, and Lucian Andrei Perișoară. 2025. "Fast-Balancing Passive Battery Management System with Remote Monitoring for the Automotive Industry" Electronics 14, no. 13: 2606. https://doi.org/10.3390/electronics14132606
APA StyleGuran, I.-C., Florescu, A., Bizon, N., & Perișoară, L. A. (2025). Fast-Balancing Passive Battery Management System with Remote Monitoring for the Automotive Industry. Electronics, 14(13), 2606. https://doi.org/10.3390/electronics14132606