
Multi-Level Synchronization of Chaotic Systems for Highly-Secured Communication



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Triple-Cascade Chaos: First synchronization of three distinct chaotic systems for ultra-secure communication;
- Provably Secure: Lyapunov-stable nonlinear active control (NAC) ensures robust synchronization against noise/parameter mismatches;
- Practical: Numerical simulations and Simulink implementations validate the feasibility and efficiency of the triple-cascade synchronization;
- Security Enhancement: The proposed masking technique, tested on a sinusoidal signal, demonstrates superior signal obfuscation compared to single- or dual-system methods.
2. Description of Chaotic Systems
2.1. Bhalekar–Gejji System and Simulations
2.2. Chen’s System and Simulations
2.3. 3D Chaotic System
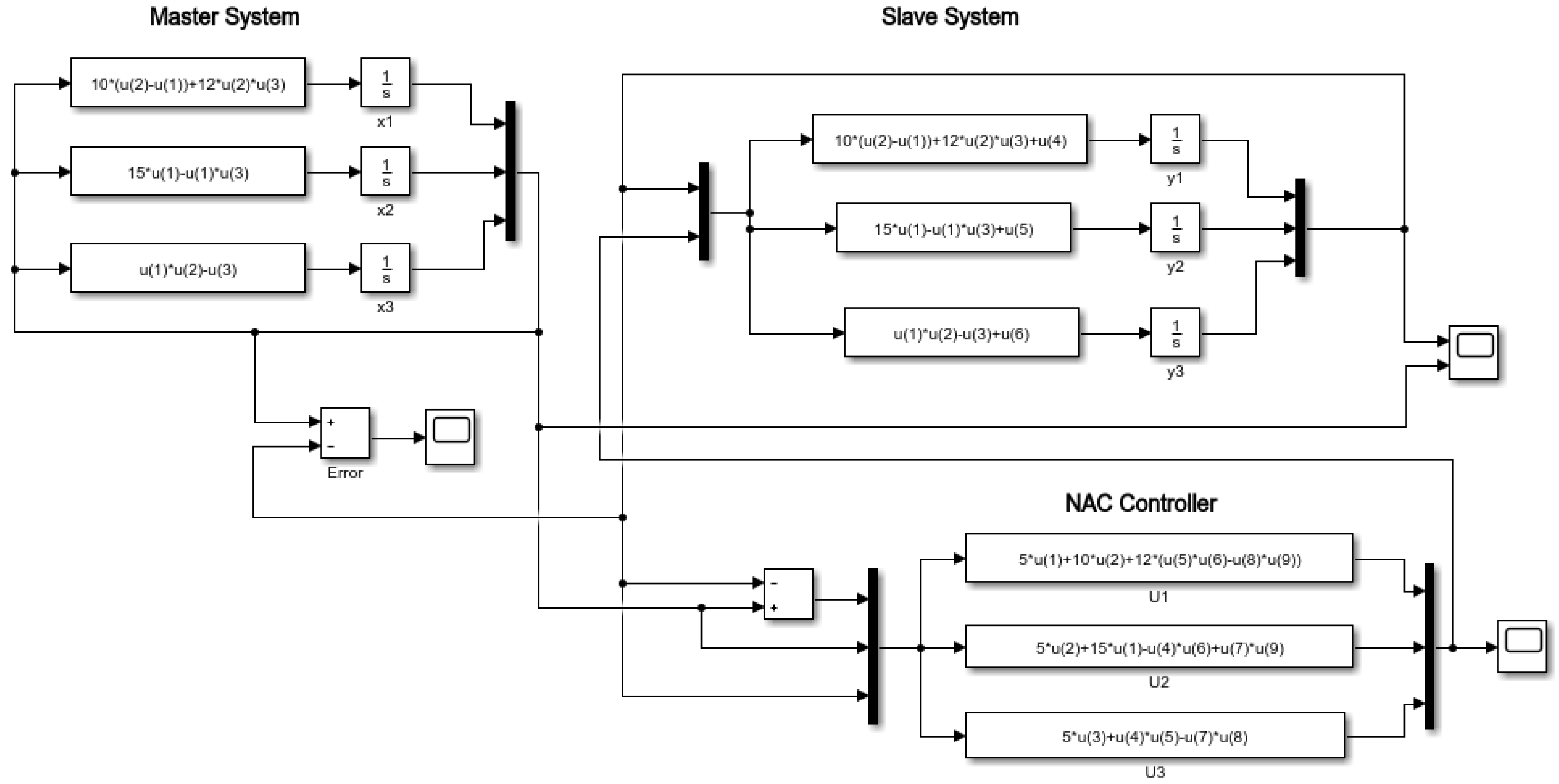
3. Synchronization Using the Nonlinear Active Control (NAC) Method
3.1. General Principle of Synchronization of the Multi-Variable Retroactive Control Law
3.2. Feedback Control Law and Lyapunov Stability Condition
- When , then
- When , then
4. Application of the Nonlinear Active Control Method to Synchronize Chaotic Systems
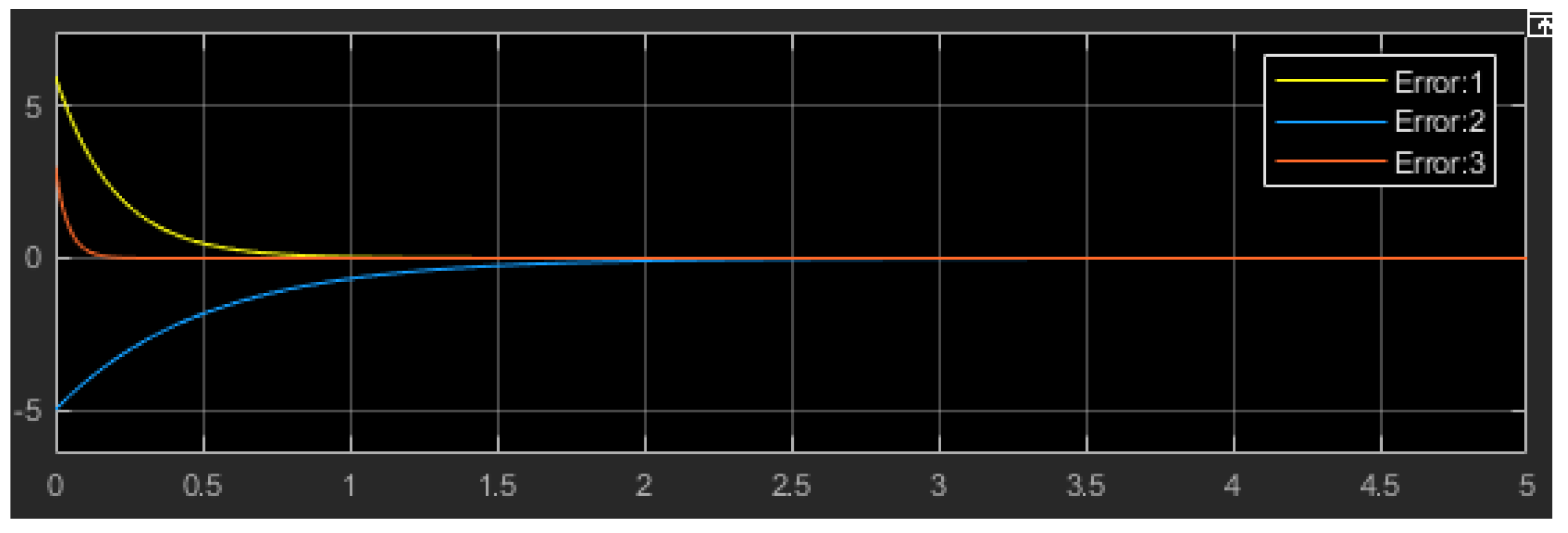
4.1. Application to the Bhalekar–Gejji Chaotic System
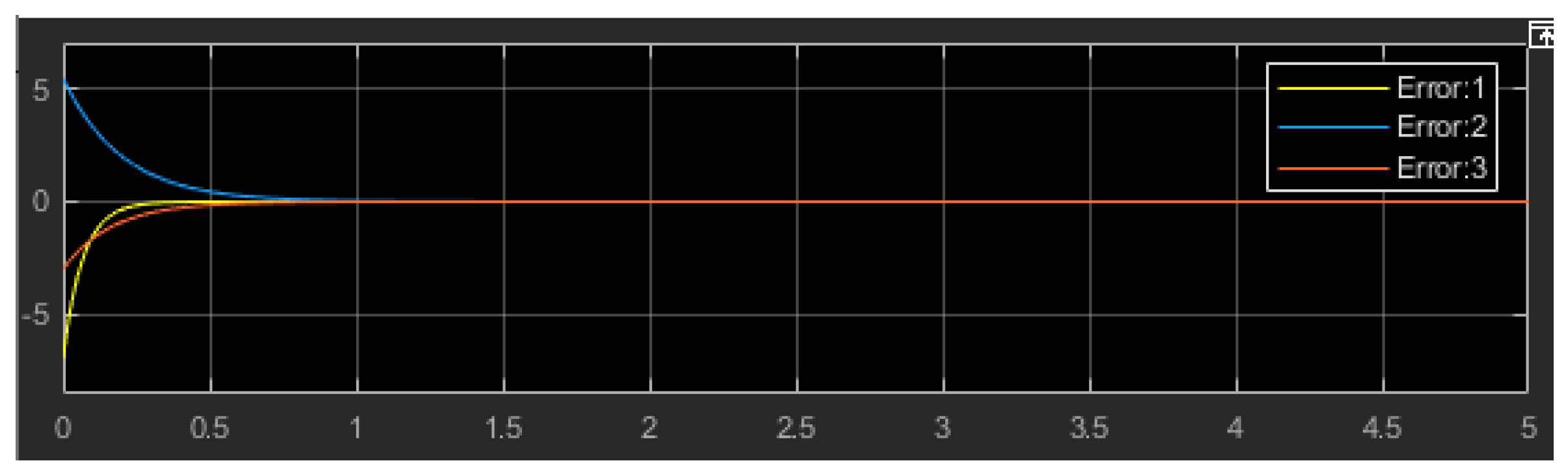
4.2. Application of the NAC Method to Chen’s System
4.3. Application to the 3D Chaotic Oscillator
5. Global Synchronization Scheme and Application to Secure Communication
5.1. The Transmission Process
- First step masking
- Second step masking
- Third step masking
5.2. Recovery Process
6. Robustness Evaluation of Chaotic System and Synchronization Scheme
6.1. Parameter Perturbation Analysis
6.2. Noise Resistance Testing
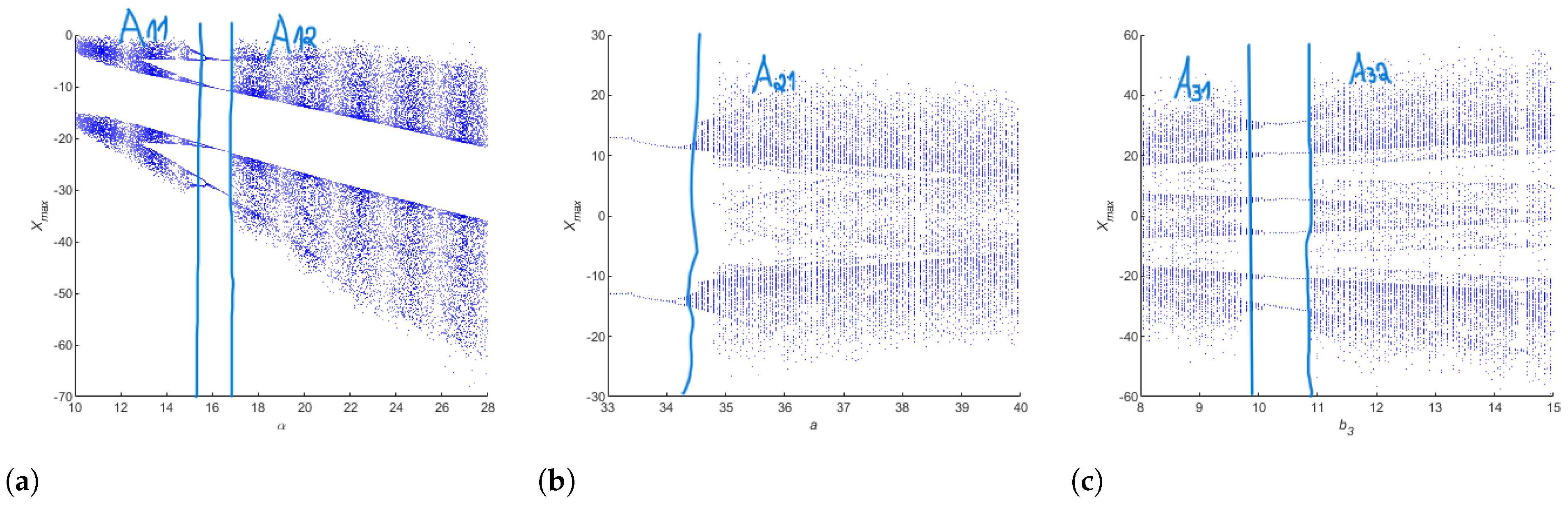
6.3. Bifurcation Diagram and Parameters Variation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Feng, W.; Zhang, J.; Chen, Y.; Qin, Z.; Zhang, Y.; Ahmad, M.; Woźniak, M. Exploiting robust quadratic polynomial hyperchaotic map and pixel fusion strategy for efficient image encryption. Expert Syst. Appl. 2024, 246, 123190. [Google Scholar] [CrossRef]
- Feng, W.; Zhao, X.; Zhang, J.; Qin, Z.; Zhang, J.; He, Y. Image encryption algorithm based on plane-level image filtering and discrete logarithmic transform. Mathematics 2022, 10, 2751. [Google Scholar] [CrossRef]
- Yu, F.; Zhang, S.; Su, D.; Wu, Y.; Gracia, Y.M.; Yin, H. Dynamic Analysis and Implementation of FPGA for a New 4D Fractional-Order Memristive Hopfield Neural Network. Fractal Fract. 2025, 9, 115. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Volos, C.; Pham, V.T.; Madhavan, K.; Idowu, B.A. Adaptive synchronization of chaotic systems with applications to secure communication. IEEE Trans. Cybern 2022, 52, 5009–5022. [Google Scholar]
- Khan, A.A.; Singh, J.P. Chaos-based image encryption using hybrid synchronization. Multimed. Tools Appl. 2023, 82, 5671–5690. [Google Scholar]
- Vaidyanathan, S. Adaptive chaotic synchronization of enzymes substrates system with ferroelectric behaviour in brain waves. Int. J. PharmTech Res. 2015, 8, 964–973. [Google Scholar]
- Fang, J.Q. Controlling Chaos and Developing High and New Technology; Atomic Energy Press: Beijing, China, 2022. [Google Scholar]
- Preishuber, M.; Hütter, T.; Katzenbeisser, S.; Uhl, A. Depreciating motivation and empirical security analysis of chaos-based image and video encryption. IEEE Trans. Inf. Forensics Secur. 2018, 13, 2137–2150. [Google Scholar] [CrossRef]
- Velamore, A.A.; Hegde, A.; Khan, A.A.; Deb, S. Dual cascaded fractional-order chaotic synchronization for secure communication with analog circuit realisation. In Proceedings of the 2021 IEEE Second International Conference on Control, Measurement and Instrumentation (CMI), Kolkata, India, 8–10 January 2021; pp. 1–6. [Google Scholar]
- Du, H.Y.; Zeng, Q.S.; Wang, C.H. Function projective synchronization of different chaotic systems with uncertain parameters. Phys. Lett. A 2008, 372, 5402–5410. [Google Scholar] [CrossRef]
- Feng, W.; Yang, J.; Zhao, X.; Qin, Z.; Zhang, J.; Zhu, Z.; Wen, H.; Qian, K. A Novel Multi-Channel Image Encryption Algorithm Leveraging Pixel Reorganization and Hyperchaotic Maps. Mathematics 2024, 12, 3917. [Google Scholar] [CrossRef]
- Feng, W.; Wang, Q.; Liu1, H.; Ren, Y.; Zhang, J.; Zhang, S.; Qian, K.; Wen, H. Exploiting Newly Designed Fractional-Order 3D Lorenz Chaotic System and 2DDiscrete Polynomial Hyper-Chaotic Map for High-Performance Multi-Image Encryption. Fractal Fract. 2023, 7, 887. [Google Scholar] [CrossRef]
- Liao, Y.; Lin, Y.; Li, Q.; Xing, Z.; Yuan, X. Lightweight Image Encryption Algorithm Using 4D-NDS: Compound Dynamic Diffusion and Single-Round Efficiency. IEEE Access 2025, 13, 74656–74666. [Google Scholar] [CrossRef]
- Yousef, A.; Arslan, M.; Jawad, A. A Lightweight Image Encryption Algorithm Based on Chaotic Mapand Random Substitution. Entropy 2022, 24, 1344. [Google Scholar]
- Tung-Tsun, L.; Shyi-Tsong, W. A Lightweight Keystream Generator Based on Expanded Chaos with a Counter for Secure IoT. Electronics 2024, 13, 5019. [Google Scholar] [CrossRef]
- Bonny, T.; Al Nassan, W.; Vaidyanathan, S.; Sambas, A. Highly-secured chaos-based communication system using cascaded masking technique and adaptive synchronization. Multimed. Tools Appl. 2023, 82, 34229–34258. [Google Scholar] [CrossRef]
- Singh, P.P.; Singh, J.P.; Roy, B.K. Synchronization and anti synchronization of Lu and Bhalekar-Gejji chaotic systems using nonlinear active control. Chaos Solitons Fractals 2014, 69, 31–39. [Google Scholar] [CrossRef]
- Bhalekar, S.B.; Gejji, V.D. A new chaotic dynamical system and its synchronization. In Proceedings of the International Conference on Mathematical Sciences in Honor of Prof. AM Mathai, Kerala, India, 17–19 January 2011; pp. 1–10. [Google Scholar]
- Chen, G.; Ueta, T. Yet another chaotic attractor. Int. J. Bifurc. Chaos 1999, 9, 1465–1466. [Google Scholar] [CrossRef]
- Shieh, C.S.; Hung, R.T. Hybrid control for synchronizing a chaotic system. Appl. Math. Model 2011, 35, 3751–3758. [Google Scholar] [CrossRef]
- Li, C.; Zhang, Y.; Wang, X.; Chen, G. AI-enhanced chaotic encryption for 5G networks. IEEE Trans. Commun. 2024, 72, 1–15. [Google Scholar]
- Occhipinti, L.; Fortuna, L.; Rizzo, A.; Frasca, M. Programmable Chaos Generator and Process for Use Thereof; STMicroelectronics S.r.l.: Agrate Brianza, Italy, 2005; p. 6842745. [Google Scholar]
- Vaidyanathan, S.; Alexander, P. A seven term novel 3-D chaotic system with three quadratic nonlinearities and its LABVIEW implementation. J. Coord. 2015, 1, 1–15. [Google Scholar]
- Bai, E.W.; Lonngren, K.E. Synchronization of two Lorenz systems using active control A seven term novel 3-D chaotic system with three quadratic nonlinearities and its LABVIEW implementation. Chaos Solitons Fractals 1997, 8, 51–58. [Google Scholar] [CrossRef]
- Bai, E.W.; Lonngren, K.E. Sequential synchronization of two Lorenz systems using active control. Chaos Solitons Fractals 2000, 11, 1041–1044. [Google Scholar] [CrossRef]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zourmba, K.; Wamba, J.; Fortuna, L. Multi-Level Synchronization of Chaotic Systems for Highly-Secured Communication. Electronics 2025, 14, 2592. https://doi.org/10.3390/electronics14132592
Zourmba K, Wamba J, Fortuna L. Multi-Level Synchronization of Chaotic Systems for Highly-Secured Communication. Electronics. 2025; 14(13):2592. https://doi.org/10.3390/electronics14132592
Chicago/Turabian StyleZourmba, Kotadai, Joseph Wamba, and Luigi Fortuna. 2025. "Multi-Level Synchronization of Chaotic Systems for Highly-Secured Communication" Electronics 14, no. 13: 2592. https://doi.org/10.3390/electronics14132592
APA StyleZourmba, K., Wamba, J., & Fortuna, L. (2025). Multi-Level Synchronization of Chaotic Systems for Highly-Secured Communication. Electronics, 14(13), 2592. https://doi.org/10.3390/electronics14132592