
A Fault Direction Discrimination Method for a Two-Terminal Weakly Fed AC System Using the Time-Domain Fault Model for the Difference Discrimination of Composite Electrical Quantities

Abstract
1. Introduction
- (1)
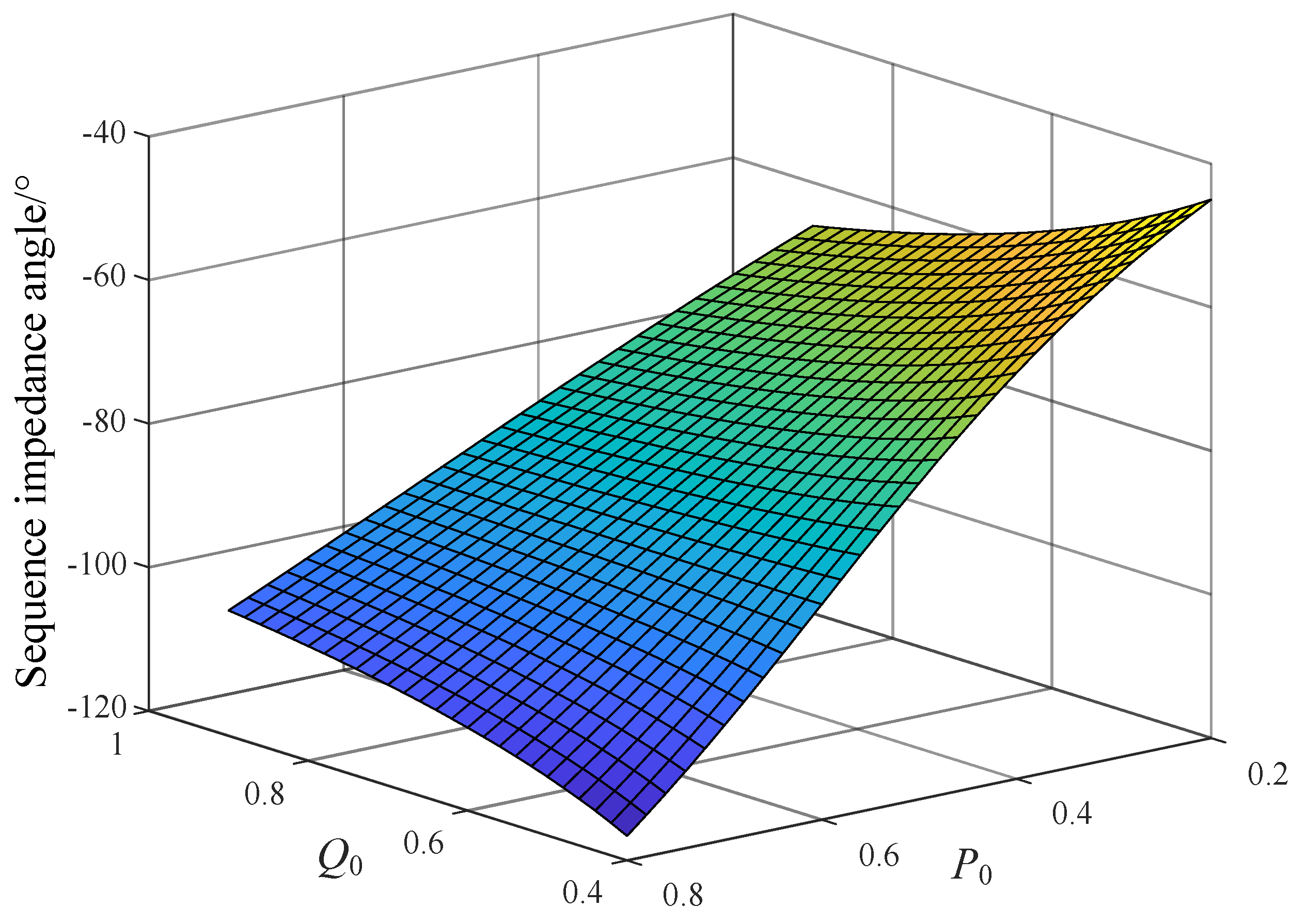
- The reliability problem of directional elements caused by the complexity of fault characteristics under the control strategy of the converter in the two-terminal weakly fed AC system is specifically manifested as described below. The different positive- and negative-sequence control strategies of the converters on both sides make the equivalent sequence impedance of the system show fluctuation characteristics different from those of the traditional synchronous machine, resulting in a reduction in the reliability of direction discrimination of the traditional directional elements.
- (2)
- The problem of fault identification sensitivity caused by the complexity of fault characteristics under the control strategy of the converter in the two-terminal weakly fed AC system is specifically manifested as the controlled characteristics of the converters on both sides weaken the characteristics of the output electrical quantity, resulting in a decrease in the sensitivity of fault direction discrimination of traditional directional elements.
- (3)
- The control functions of the line direction element and the converter in the two-terminal weakly fed AC system have not been fully integrated. Specifically, the vulnerability of the converter leads to the rapid entry of the converter into the fault control stage after a fault, causing the fault regulation time scale of the converter and the protection action time to tend to overlap. Changes in the fault characteristics will affect the action performance of the direction element.
- (1)
- This method avoids the influence of the control strategy when calculating the sequence impedance of traditional directional elements.
- (2)
- The idea based on model recognition only relies on identifying the relationship between fault voltage and current, and weak electrical quantities will not have an impact on this method.
- (3)
- This method can identify the fault direction by relying on the relationship between the fault electrical quantities in the fault control stage, and is not affected by the adjustment of the control strategy.
2. Adaptability Analysis of Traditional Directional Elements
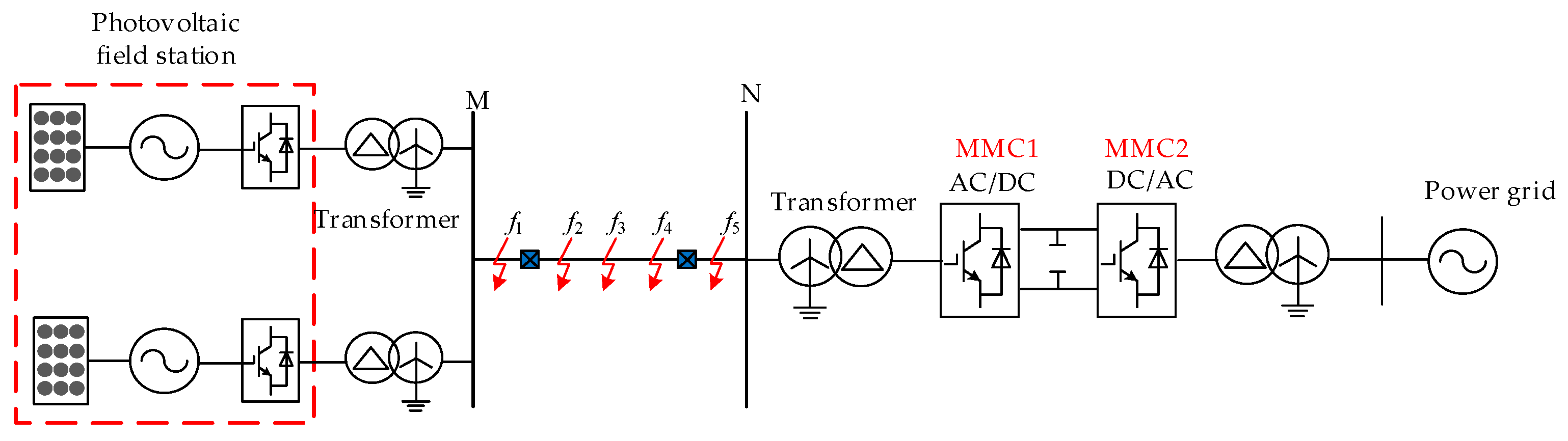
2.1. Analysis of the Sequence Impedance Characteristics of a Two-Terminal Weakly Fed AC System
2.2. Adaptive Analysis of Directional Elements of Traditional Sequence Components
- the positive-sequence fault component direction element is
- the negative-sequence direction element is
- and the zero-sequence directional element is
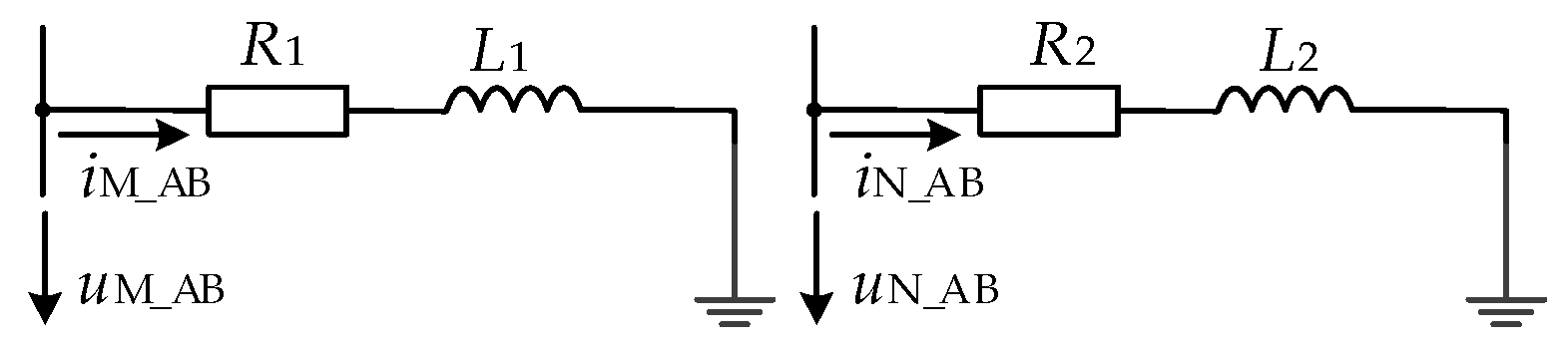
3. Model Difference Analysis
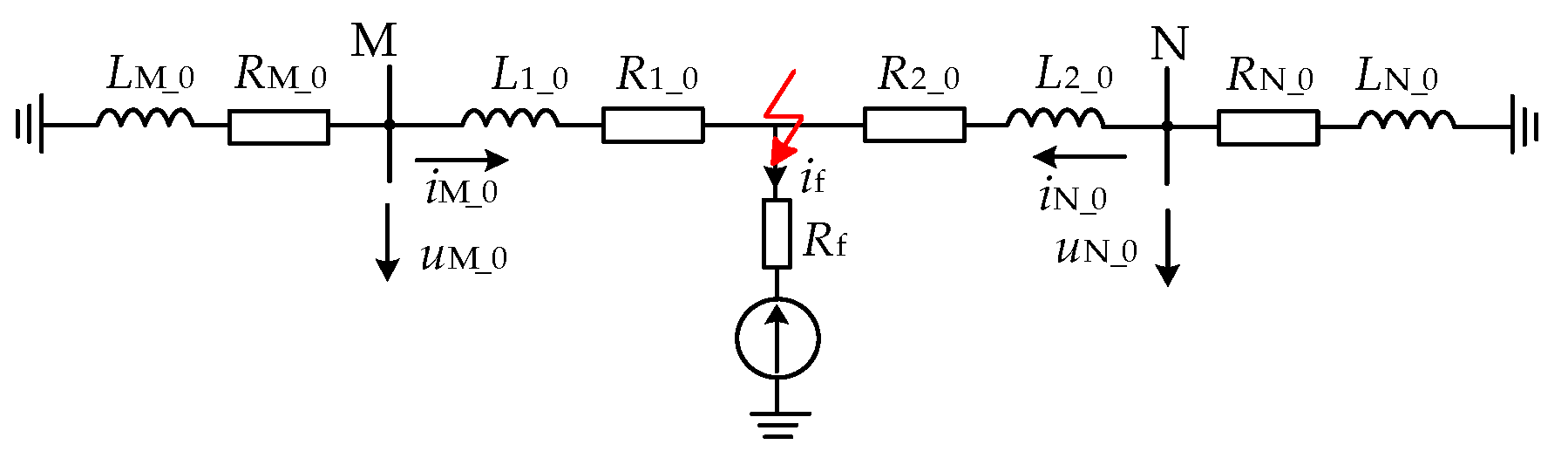
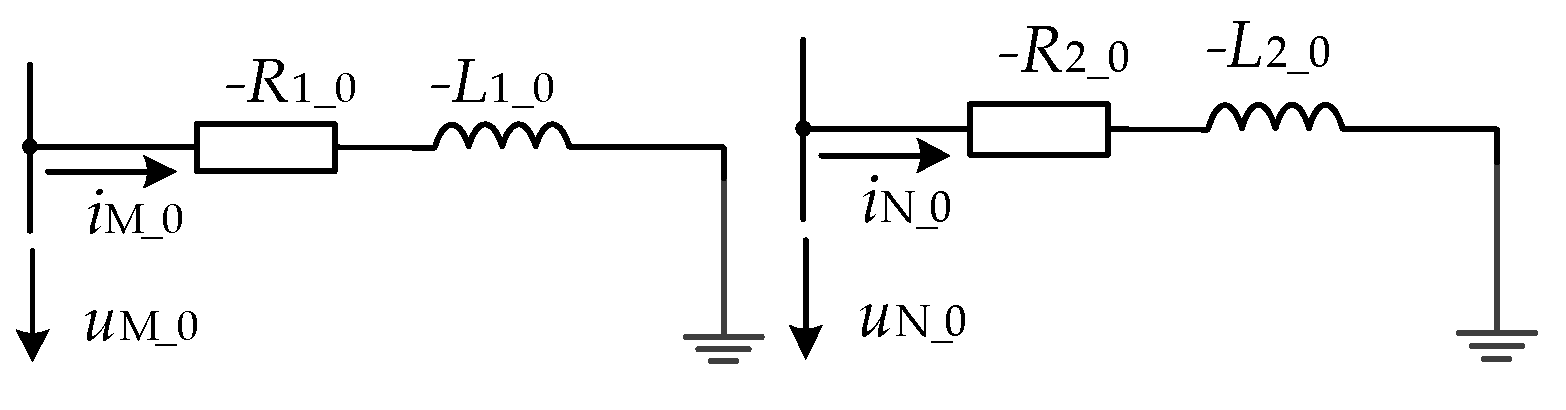
3.1. Zero-Mode Directional Element
3.2. Full Directional Elements
3.3. Feature Extraction
- (1)
- The introduction of fitted voltage and measured voltage
- (2)
- Characteristic difference analysis of the fitted voltage and measured voltage in the positive and negative directions
4. Fault Direction Discrimination Method Based on Model Recognition
4.1. The Introduction of the Kendall Coefficient
4.2. Directional Element Criterion
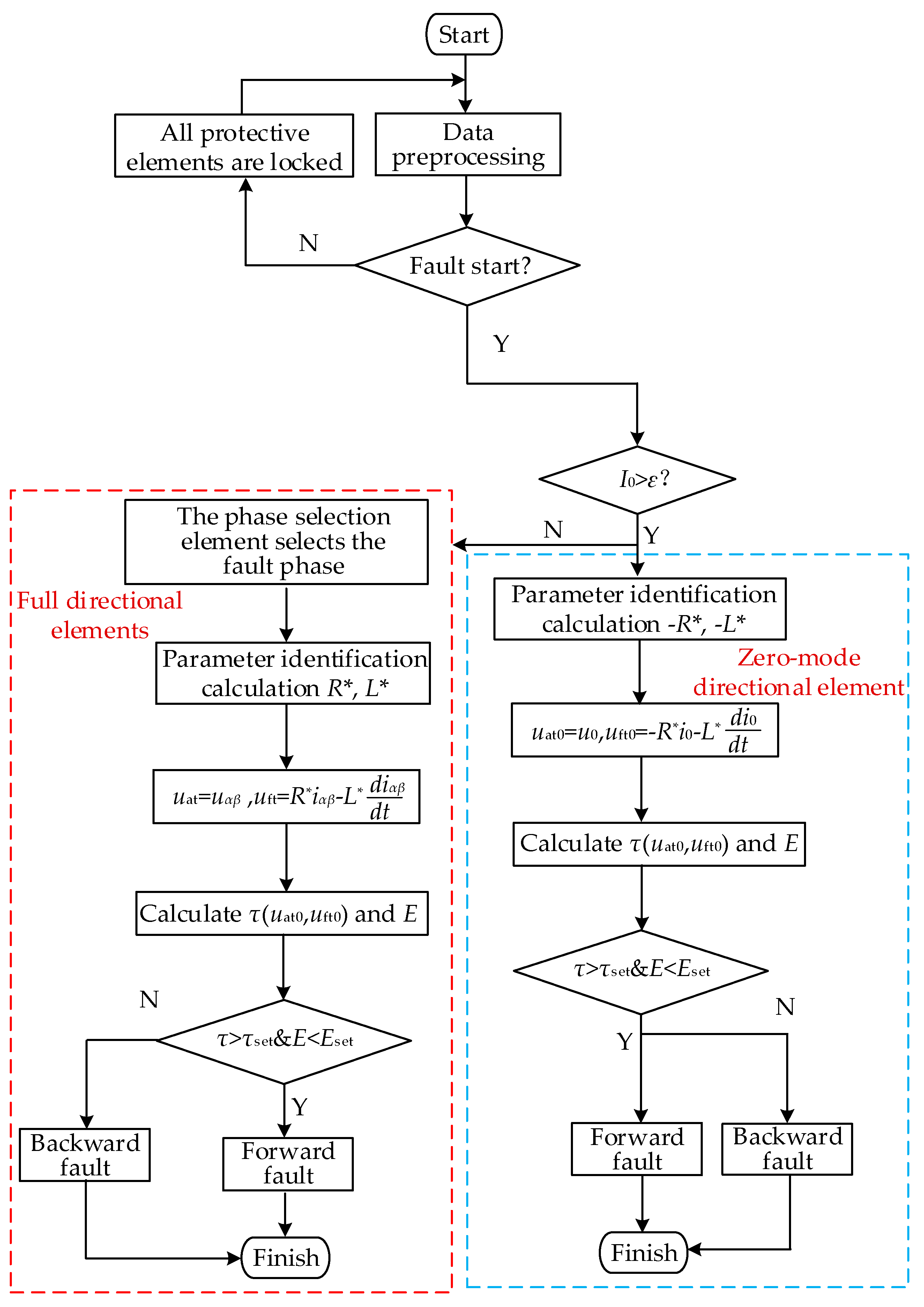
4.3. Protection Scheme
- (1)
- The zero-mode current is calculated when a fault occurs on the outgoing line of a two-terminal weakly fed AC system. First of all, according to whether the fault instantaneous zero mode current meets the I0 > ε criterion, determine whether it is a ground short circuit, and ε is the setting value; its value is very small and can be adjusted to εset = 0.1. If the conditions are met, the fault is a grounded short circuit. Otherwise, the fault is an ungrounded short circuit.
- (2)
- The fault phase is selected by the phase selector element and u and i are determined.
- (3)
- Assume that the fault occurs in the positive direction of the protection installation. Based on the parameter recognition algorithm, the equivalent resistance R* and equivalent inductance L* from the fault point to the protection installation point are calculated.
- (4)
- For ungrounded faults, the fault phase is used and the full direction criterion is used to judge the fault direction. For a ground fault, the zero-mode direction criterion is used to judge the direction of the fault.
- (5)
- For ungrounded faults, the correlation coefficient between the measured voltage and the forward fault fitting voltage is calculated, and the model error is calculated. For ground faults, the correlation coefficient between the zero-mode measured voltage and the zero analog combined voltage is calculated and the model error is calculated.
- (6)
- The relationship between the calculated Kendall coefficient τ and the average model error and the setting value is determined.
5. Simulation Verification
5.1. Different Types of Fault Locations of Directional Element Action Performance Impacts
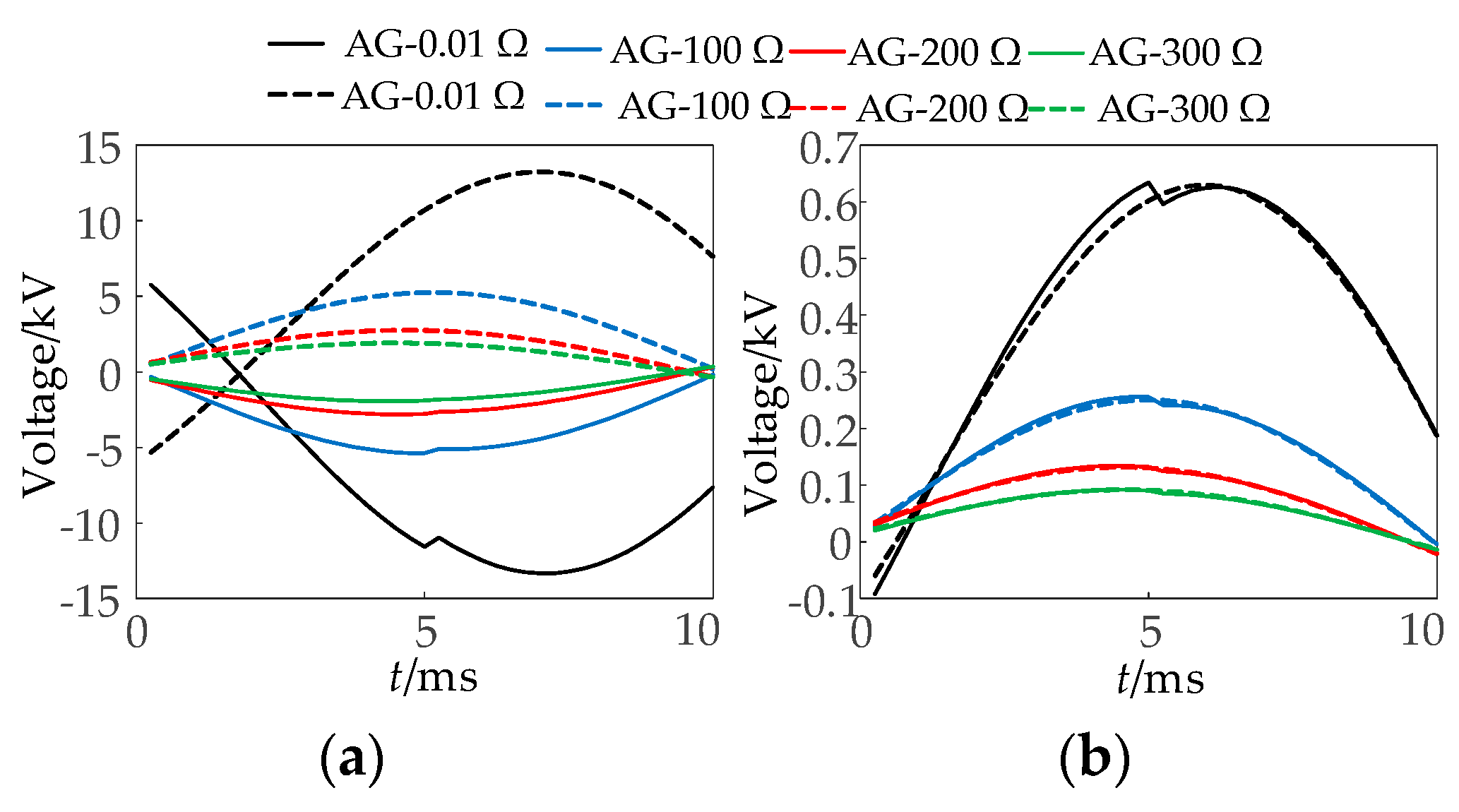
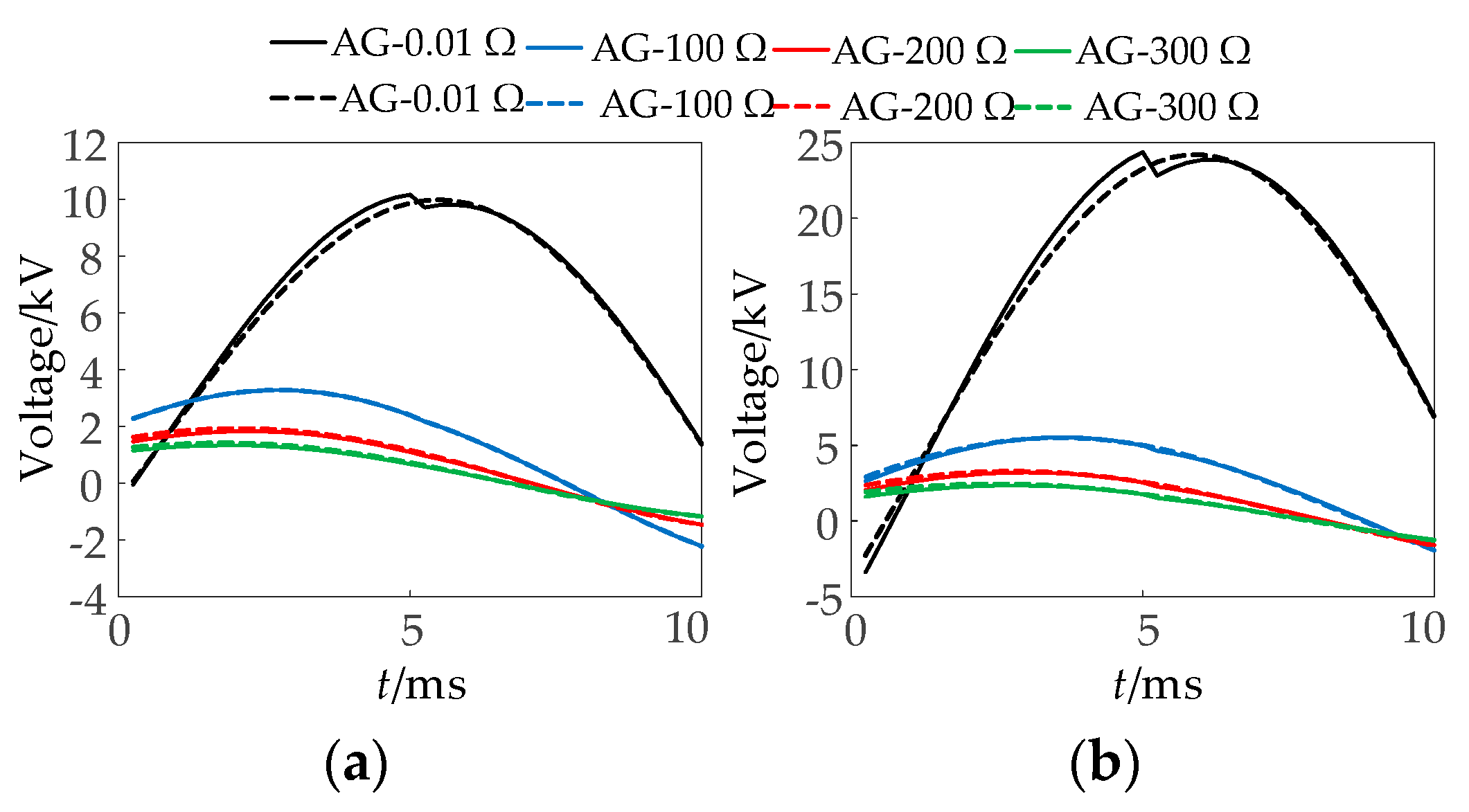
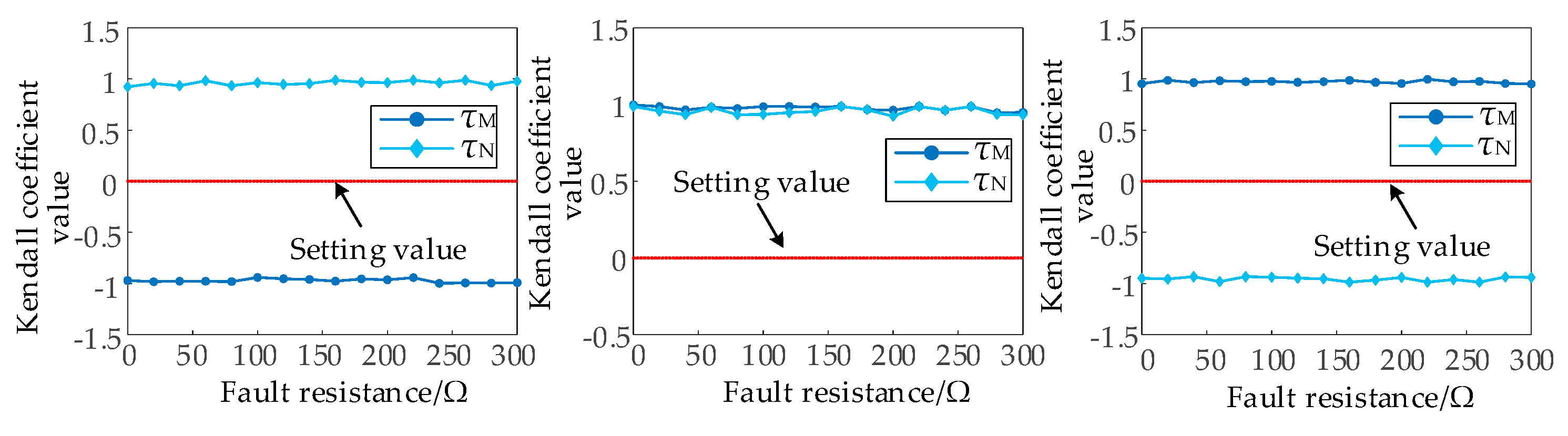
5.2. Different Transition Resistance Performances Influence the Motion of the Direction of Components
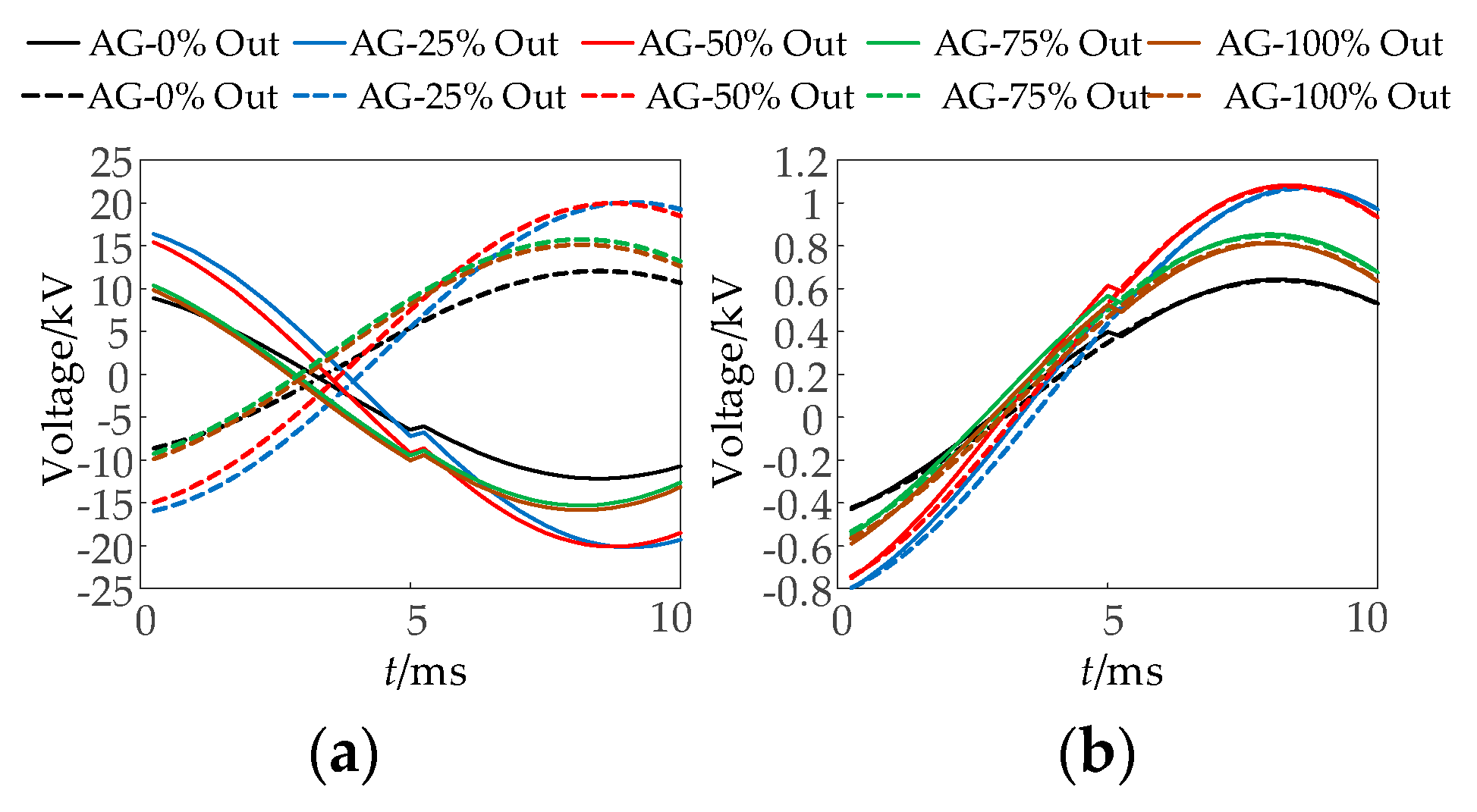
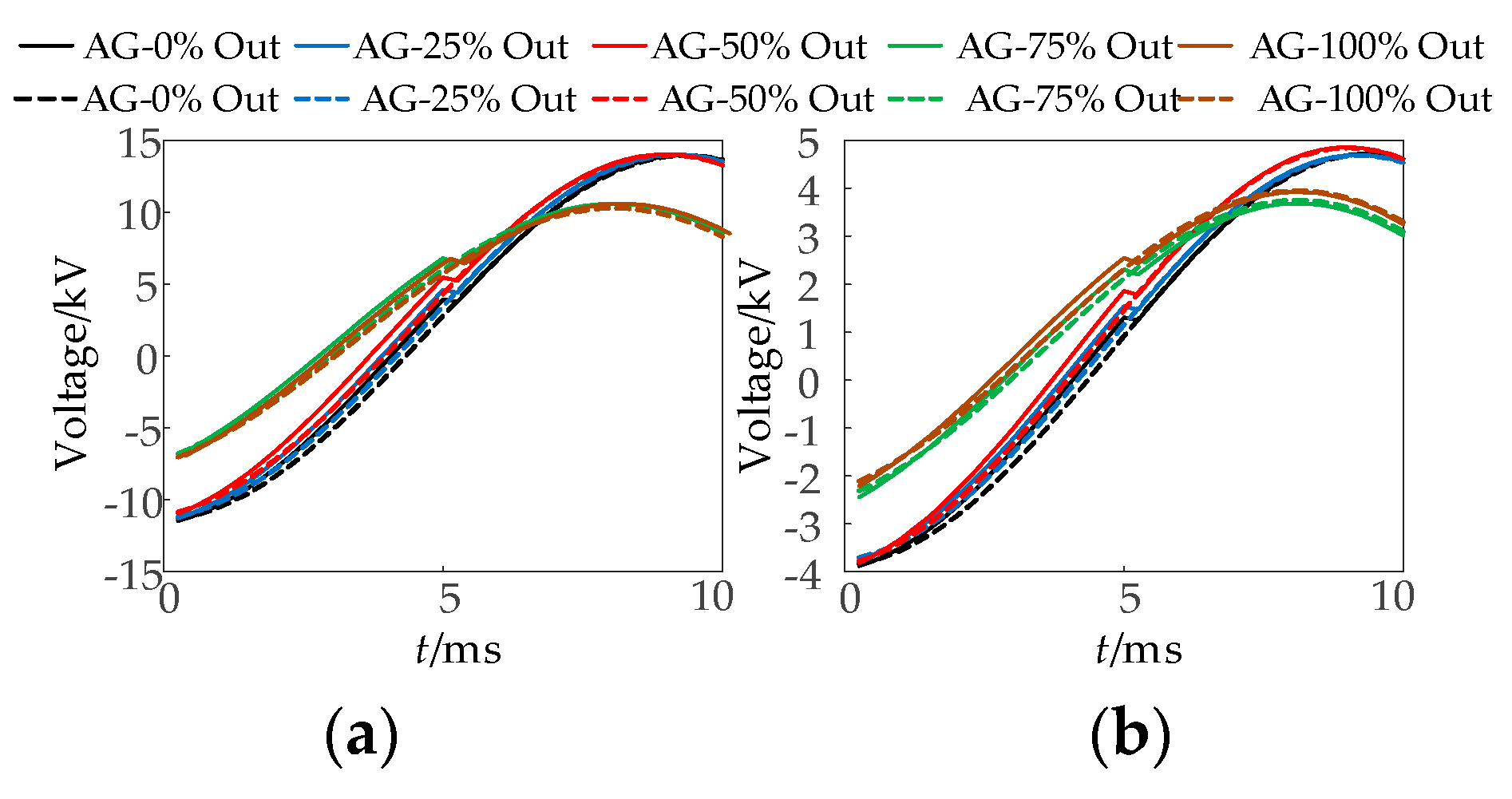
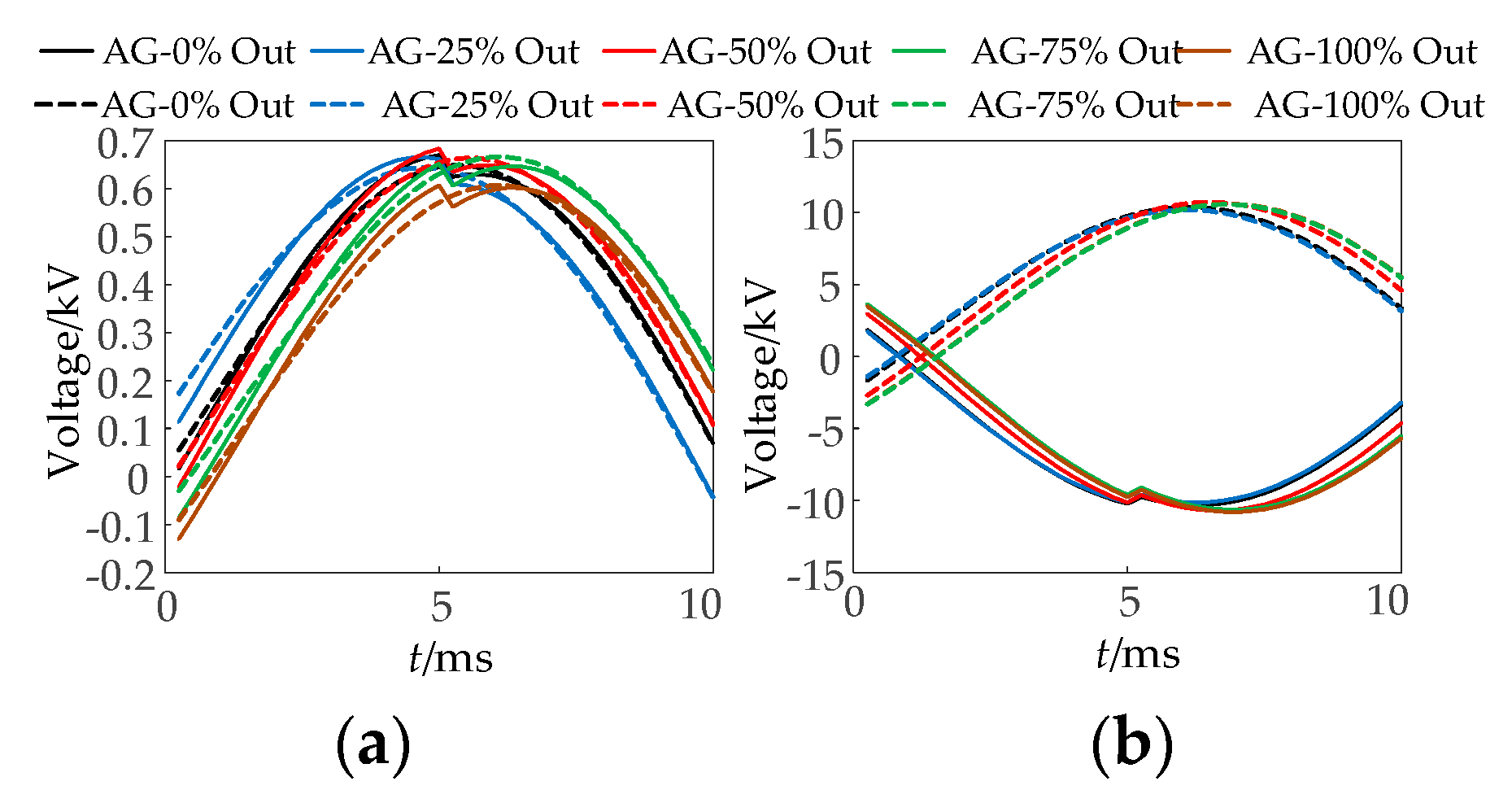
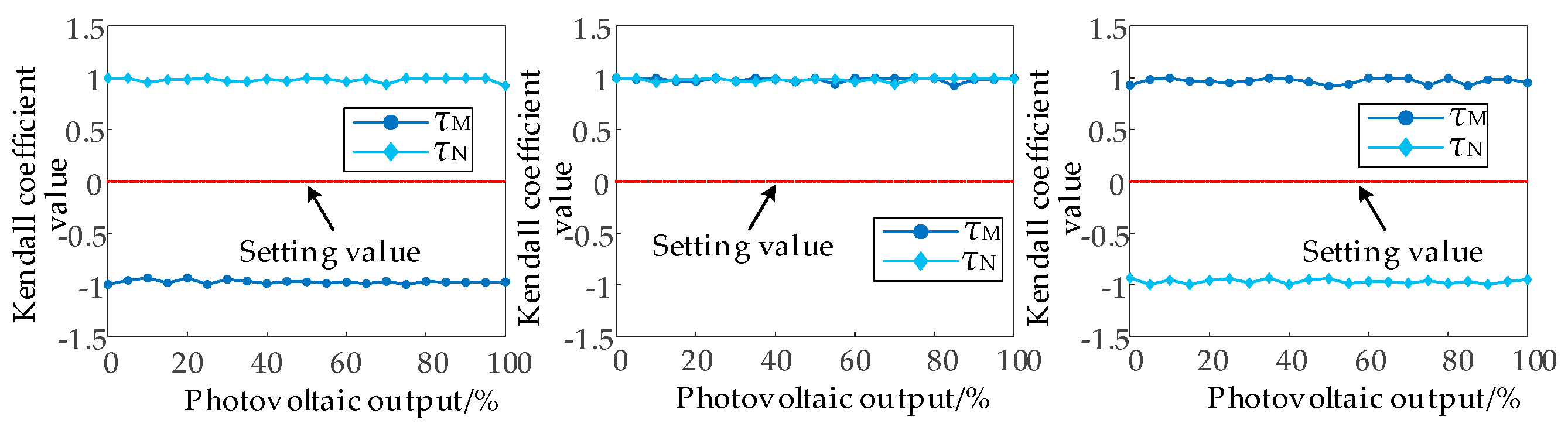
5.3. The Influence of Photovoltaic Output on the Directional Elements
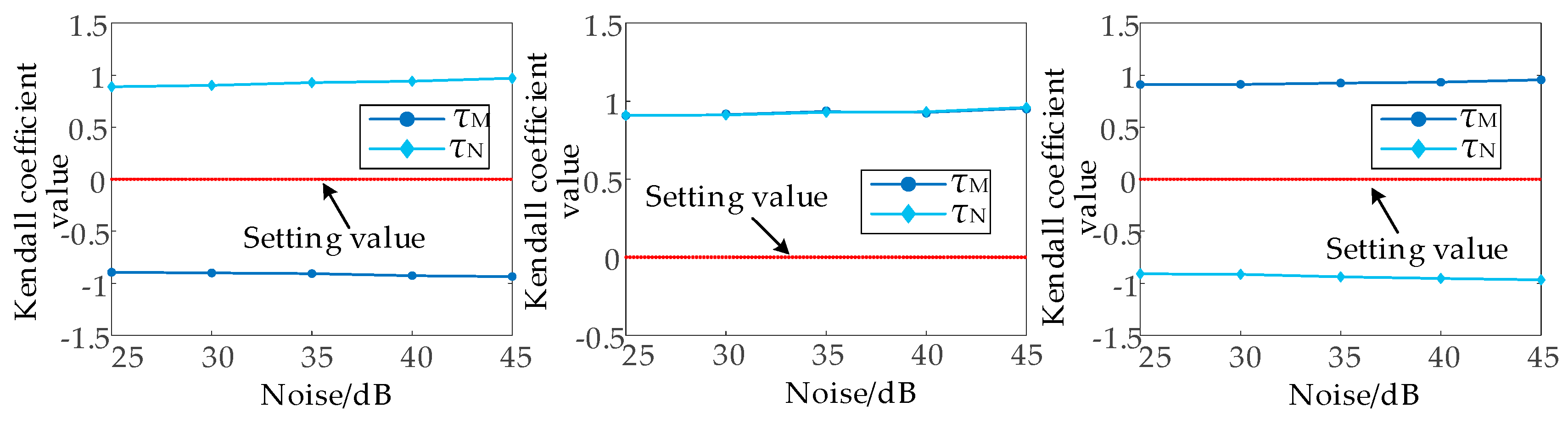
5.4. The Influence of Noise Interference on Directional Elements
5.5. The Influence of Control Strategies on Directional Elements
5.6. Comparison with Other Methods
6. Conclusions
- (1)
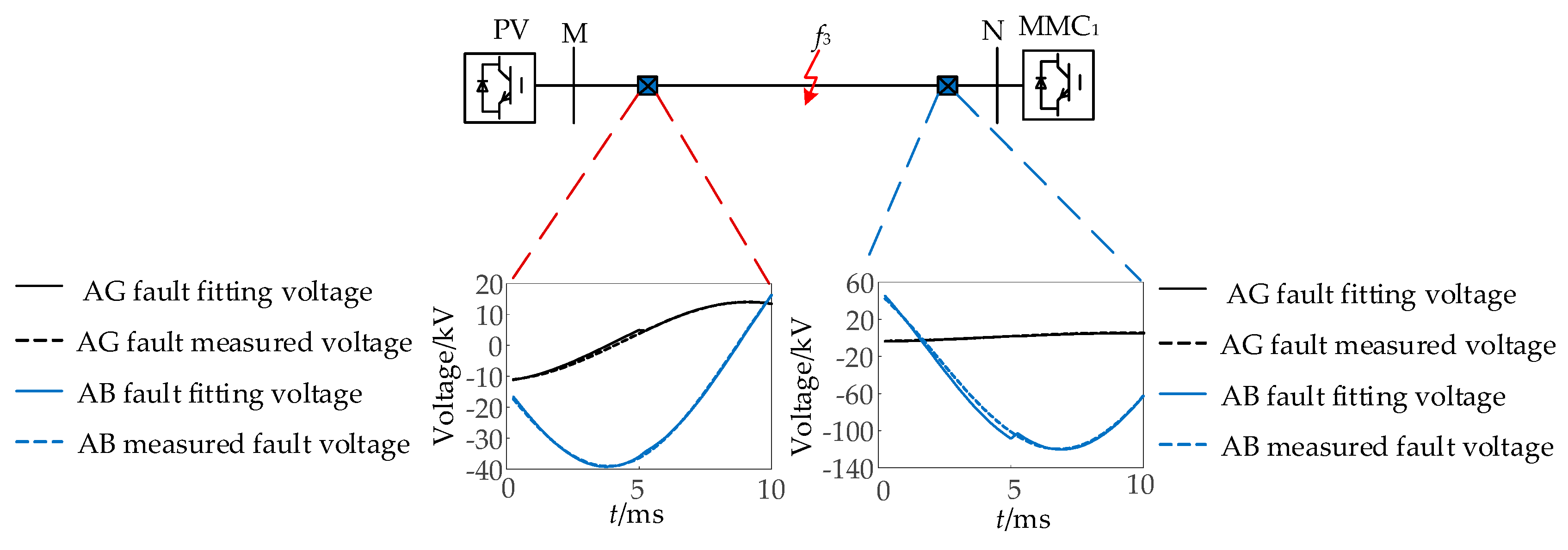
- The zero-mode voltage and current fault model under a ground fault and the full voltage and current fault model under non-ground fault are analyzed. The fitting voltage is constructed on the basis of the equivalent model, and the fault direction is determined by comparing the relationship between the fitting voltage and the measured voltage. The fitting voltage is the same as the measured voltage in the positive direction fault, and the fitting voltage is opposite to the measured voltage in the opposite direction fault.
- (2)
- The Kendall coefficient is introduced to calculate the correlation between the fitted voltage and the measured voltage, and the average model error is introduced to help judge the fault direction of the forward direction or the reverse direction. When a positive fault occurs, the Kendall coefficient between the fitted voltage and the measured voltage is close to one, and the average model error is close to zero. When the fault occurs in the opposite direction, the Kendall coefficient between the fitted voltage and the measured voltage is close to −1, and the average model error is close to 1.
- (3)
- The PSCAD/EMTDC model of a two-terminal weakly fed AC system was built to verify the performance of the proposed directional components for different fault types, fault locations, photovoltaic operating outputs, transition resistances, and control strategies. The results show that when the transition resistance is 300 Ω and the noise interference reaches 25 dB, the fault direction can still be correctly identified, which is suitable for a two-terminal weakly fed AC system.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ding, M.; Wang, W.S.; Wang, X.L.; Song, Y.T.; Chen, D.Z.; Sun, M. A review on the effect of large-scale PV generation on power systems. Proc. CSEE 2014, 34, 1–14. [Google Scholar]
- Zou, C.Y.; Wei, R.H.; Feng, J.J.; Zhou, Y.B. Development status and application prospect of VSC-HVDC. South. Power Syst. Technol. 2022, 16, 1–7. [Google Scholar]
- Li, Y.; Luo, Y.; Xu, S.K.; Zhou, Y.B.; Yuan, Z.C. VSC-HVDC transmission technology: Application, advancement and expectation. South. Power Syst. Technol. 2015, 9, 7–13. [Google Scholar]
- Feng, J.J.; Xin, Q.M.; Zhao, X.B.; Fu, C.; Yuan, Z.Y.; Huang, B.Y.; Zhou, Y.B.; Zhou, C.Y.; Hou, T. Integrated design scheme of VSC-HVDC system for large-scale renewable energy ultra-long-distance transmission. South. Power Syst. Technol. 2023, 18, 34–44. [Google Scholar]
- Ji, X.T.; Liu, D.; Xiong, P.; Chen, Y.; Yang, L.; Wen, M.H. Survey of fault analysis and protection for power system with large scale power electronic equipments. Autom. Electr. Power Syst. 2024, 48, 140–149. [Google Scholar]
- Yang, Q.F.; Liu, Y.Q.; Zhu, Y.M.; Chen, G.B. Improved Negative Sequence Directional Element for Transmission Line Connecting DFIG. Autom. Electr. Power Syst. 2019, 43, 118–126. [Google Scholar]
- Niu, W.M.; Fan, Y.F.; Zhang, X.Y.; Ma, J. Novel parameter identification directional element based on impedance amplitude fluctuation difference. Power Syst. Prot. Control 2023, 51, 117–125. [Google Scholar]
- He, J.H.; Wang, Y.R.; Li, M.; Du, X.T.; Yu, T.W. New Fault Direction Identification Based on Current Distortion Characteristics in High Proportion PV Distribution System. Power Syst. Technol. 2023, 47, 4856–4865. [Google Scholar]
- Liu, W.; Lai, Q.H.; Liu, H.Y.; Zhang, Z.; Tan, Z.L. Novel method of fault direction identification for inverter-interfaced power supply access. Electr. Power Autom. Equip. 2020, 40, 205–212. [Google Scholar]
- ALI, H.; REZA, I. A new directional element for microgrid protection. IEEE Trans. Smart Grid 2018, 9, 6862–6876. [Google Scholar]
- Xu, G.J.; Liang, Y.Y.; Zha, W.T.; Huo, Y.T.; Qin, X.T.; Wang, C. Adaptability analysis of directional relay for transmission line out-sending from photovoltaic power plant. Power Syst. Technol. 2019, 43, 1632–1639. [Google Scholar]
- Liang, Y.Y.; Lu, Z.J.; Li, W.L.; Huo, Y.T.; Xu, G.J.; Wang, C. Adaptability Analysis of Negative Sequence Directional Element and Cooperative Method With Control Strategy of MMC-HVDC. Power Syst. Technol. 2019, 43, 2998–3006. [Google Scholar]
- Wu, L.P.; Wang, X.H.; Yan, D.; Ma, W.C.; Zhou, N.; Yu, H. Control Strategy for Fault Component Impedance Reconstruction of Flexible DC Converter Considering Relay Protection Requirement. Autom. Electr. Power Syst. 2023, 47, 110–119. [Google Scholar]
- Tang, Y.; Shu, H.; Dai, Y.; Zhang, Y.; Han, Y. Pilot protection based on the quasi-directional element of LCL-tuned half-wavelength transmission line. Int. J. Electr. Power Energy Syst. 2023, 158, 109983. [Google Scholar] [CrossRef]
- Xu, H.; Yin, C.; Dong, G.; Wang, S.; Xu, L.; Ouyang, F.; Zhu, W. Optimization of zero-sequence voltage compensation for zero-sequence directional elements. Electr. Power Syst. Res. 2021, 197, 107300. [Google Scholar] [CrossRef]
- Chen, Y.; Wen, M.; Yin, X.; Cai, Y.; Zheng, J. Distance protection for transmission lines of DFIG-based wind power integration system. Int. J. Electr. Power Energy Syst. 2018, 100, 438–448. [Google Scholar] [CrossRef]
- Ge, Y.Z. Principle and Technology of New Relay Protection and Fault Location; Xi’an Jiaotong University Press: Xi’an, China, 2007. [Google Scholar]
- Wu, X.Q. Signal System and Signal Processing; Publishing House of Electronics Industry: Beijing, China, 1996. [Google Scholar]
- Cong, W.; Zhang, H.; Kong, H.; Chen, M.; Wei, Z. Longitudinal Protection Method Based on Voltage Wave Comparison in AC/DC Hybrid System. IEEE Trans. Ind. Appl. 2022, 58, 1564–1572. [Google Scholar] [CrossRef]
- Sadbhawna; Jakhetiya, V.; Chaudhary, S.; Subudhi, B.N.; Lin, W.; Guntuku, S.C. Perceptually Unimportant Information Reduction and Cosine Similarity-Based Quality Assessment of 3D-Synthesized Images. IEEE Trans. Image Process. 2022, 31, 2027–2039. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Location | Fault Type | τM | Discriminant Result | τN | Discriminant Result | ||
|---|---|---|---|---|---|---|---|
| f1 | AG | −0.9718 | 0.9999 | B | 0.9231 | 0.0422 | F |
| AB | −0.9872 | 0.9999 | B | 0.9590 | 0.0609 | F | |
| ABG | −0.9923 | 0.9924 | B | 0.9974 | 0.0619 | F | |
| ABCG | −0.9282 | 0.9999 | B | 0.9949 | 0.0664 | F | |
| f3 | AG | 0.9974 | 0.0702 | F | 0.9872 | 0.0554 | F |
| AB | 0.9974 | 0.0151 | F | 0.9538 | 0.0338 | F | |
| ABG | 0.9923 | 0.0361 | F | 0.9949 | 0.0347 | F | |
| ABCG | 0.9359 | 0.0363 | F | 0.9974 | 0.0633 | F | |
| f5 | AG | 0.9538 | 0.0227 | F | −0.9487 | 0.9804 | B |
| AB | 0.9795 | 0.0214 | F | −0.9897 | 0.9930 | B | |
| ABG | 0.9333 | 0.0498 | F | −0.9974 | 0.9934 | B | |
| ABCG | 0.9997 | 0.0289 | F | −0.9846 | 0.9999 | B |
| Fault Location | Transition Resistance | τM | Discriminant Result | τN | Discriminant Result | ||
|---|---|---|---|---|---|---|---|
| f1 | 0.01 | −0.9718 | 0.9999 | B | 0.9231 | 0.0422 | F |
| 100 | −0.9410 | 0.9999 | B | 0.9641 | 0.0184 | F | |
| 200 | −0.9641 | 0.9999 | B | 0.9641 | 0.0391 | F | |
| 300 | −0.9923 | 0.9999 | B | 0.9769 | 0.0271 | F | |
| f3 | 0.01 | 0.9974 | 0.0702 | F | 0.9872 | 0.0554 | F |
| 100 | 0.9462 | 0.0248 | F | 0.9359 | 0.0292 | F | |
| 200 | 0.9231 | 0.0454 | F | 0.9231 | 0.0455 | F | |
| 300 | 0.9487 | 0.0367 | F | 0.9333 | 0.0323 | F | |
| f5 | 0.01 | 0.9538 | 0.0227 | F | −0.9487 | 0.9804 | B |
| 100 | 0.9564 | 0.0174 | F | −0.9385 | 0.9944 | B | |
| 200 | 0.9564 | 0.0164 | F | −0.9410 | 0.9999 | B | |
| 300 | 0.9510 | 0.0163 | F | −0.9410 | 0.9999 | B |
| Fault Location | Output | PM/nh | Discriminant Result | PN/nh | Discriminant Result | ||
|---|---|---|---|---|---|---|---|
| f1 | 0% | −0.9974 | 0.9884 | B | 0.9974 | 0.0350 | F |
| 25% | −0.9970 | 0.9860 | B | 0.9974 | 0.0394 | F | |
| 50% | −0.9846 | 0.9912 | B | 0.9974 | 0.0311 | F | |
| 75% | −0.9974 | 0.9828 | B | 0.9974 | 0.0424 | F | |
| f3 | 0% | 0.9974 | 0.0553 | F | 0.9974 | 0.0573 | F |
| 25% | 0.9974 | 0.0556 | F | 0.9974 | 0.0390 | F | |
| 50% | 0.9951 | 0.0492 | F | 0.9872 | 0.0344 | F | |
| 75% | 0.9978 | 0.0376 | F | 0.9974 | 0.0460 | F | |
| f5 | 0% | 0.9282 | 0.0348 | F | −0.9333 | 0.9999 | B |
| 25% | 0.9538 | 0.0327 | F | −0.9410 | 0.9999 | B | |
| 50% | 0.9205 | 0.0549 | F | −0.9410 | 0.9999 | B | |
| 75% | 0.9256 | 0.0652 | F | −0.9590 | 0.9806 | B |
| Fault Location | Noise | τM | Discriminant Result | τN | Discriminant Result | ||
|---|---|---|---|---|---|---|---|
| f1 | 25 | −0.8952 | 0.9253 | B | 0.8874 | 0.0615 | F |
| 35 | −0.9075 | 0.9341 | B | 0.9288 | 0.0419 | F | |
| 45 | −0.9360 | 0.9872 | B | 0.9692 | 0.0213 | F | |
| f3 | 25 | 0.9071 | 0.0446 | F | 0.9095 | 0.0413 | F |
| 35 | 0.9386 | 0.0358 | F | 0.9296 | 0.0310 | F | |
| 45 | 0.9489 | 0.0262 | F | 0.9599 | 0.0211 | F | |
| f5 | 25 | 0.9093 | 0.0407 | F | −0.9097 | 0.9698 | B |
| 35 | 0.9237 | 0.0256 | F | −0.9399 | 0.9754 | B | |
| 45 | 0.9553 | 0.0307 | F | −0.9691 | 0.9885 | B |
| Fault Location | Fault Type | τM | Discriminant Result | τN | Discriminant Result | ||
|---|---|---|---|---|---|---|---|
| f1 | AG | −0.9372 | 0.9651 | B | 0.9421 | 0.0422 | F |
| AB | −0.9152 | 0.9730 | B | 0.9765 | 0.0609 | F | |
| ABG | −0.9823 | 0.9570 | B | 0.9873 | 0.0619 | F | |
| ABCG | −0.9082 | 0.9834 | B | 0.9913 | 0.0664 | F | |
| f3 | AG | 0.9674 | 0.0257 | F | 0.9265 | 0.0554 | F |
| AB | 0.9583 | 0.0348 | F | 0.9926 | 0.0338 | F | |
| ABG | 0.9765 | 0.0350 | F | 0.9987 | 0.0347 | F | |
| ABCG | 0.9219 | 0.0620 | F | 0.9564 | 0.0633 | F | |
| f5 | AG | 0.9682 | 0.0337 | F | −0.9834 | 0.9504 | B |
| AB | 0.9782 | 0.0254 | F | −0.9109 | 0.9730 | B | |
| ABG | 0.9579 | 0.0438 | F | −0.9043 | 0.99284 | B | |
| ABCG | 0.9999 | 0.0219 | F | −0.9645 | 0.9999 | B |
| Fault Location | Fault Type | τM | Discriminant Result | τN | Discriminant Result | ||
|---|---|---|---|---|---|---|---|
| f1 | AG | −0.9108 | 0.9999 | B | 0.9240 | 0.0372 | F |
| AB | −0.9872 | 0.9999 | B | 0.9392 | 0.0489 | F | |
| ABG | −0.9723 | 0.9924 | B | 0.9874 | 0.0549 | F | |
| ABCG | −0.9182 | 0.9645 | B | 0.9518 | 0.0554 | F | |
| f3 | AG | 0.9670 | 0.0507 | F | 0.9272 | 0.0579 | F |
| AB | 0.9526 | 0.0137 | F | 0.9649 | 0.0358 | F | |
| ABG | 0.9933 | 0.0471 | F | 0.9340 | 0.0374 | F | |
| ABCG | 0.9887 | 0.0283 | F | 0.9283 | 0.0620 | F | |
| f5 | AG | 0.9453 | 0.0227 | F | −0.9487 | 0.9804 | B |
| AB | 0.9325 | 0.0350 | F | −0.9897 | 0.9930 | B | |
| ABG | 0.9632 | 0.0571 | F | −0.9974 | 0.9934 | B | |
| ABCG | 0.9238 | 0.0352 | F | −0.9846 | 0.9999 | B |
| Fault Location | Fault Type | τM | Discriminant Result | τN | Discriminant Result | ||
|---|---|---|---|---|---|---|---|
| f1 | AG | −0.9618 | 0.9999 | B | 0.9520 | 0.0652 | F |
| AB | −0.9872 | 0.9872 | B | 0.9680 | 0.0327 | F | |
| ABG | −0.9833 | 0.9340 | B | 0.9492 | 0.0619 | F | |
| ABCG | −0.9745 | 0.9780 | B | 0.9983 | 0.0664 | F | |
| f3 | AG | 0.9572 | 0.0622 | F | 0.9752 | 0.0663 | F |
| AB | 0.9860 | 0.0257 | F | 0.9838 | 0.0278 | F | |
| ABG | 0.9438 | 0.0387 | F | 0.9459 | 0.0317 | F | |
| ABCG | 0.9980 | 0.0452 | F | 0.9934 | 0.0729 | F | |
| f5 | AG | 0.9473 | 0.0195 | F | −0.9583 | 0.9838 | B |
| AB | 0.9385 | 0.0270 | F | −0.9769 | 0.9728 | B | |
| ABG | 0.9952 | 0.0385 | F | −0.9209 | 0.9928 | B | |
| ABCG | 0.9760 | 0.0270 | F | −0.9871 | 0.9685 | B |
| Fault Location | Fault Type | τM | Discriminant Result | τN | Discriminant Result | ||
|---|---|---|---|---|---|---|---|
| f1 | AG | −0.9437 | 0.9720 | B | 0.9875 | 0.0422 | F |
| AB | −0.9713 | 0.9748 | B | 0.9735 | 0.0609 | F | |
| ABG | −0.9782 | 0.9980 | B | 0.9482 | 0.0619 | F | |
| ABCG | −0.9216 | 0.9999 | B | 0.9518 | 0.0664 | F | |
| f3 | AG | 0.9489 | 0.0512 | F | 0.9770 | 0.0482 | F |
| AB | 0.9788 | 0.0270 | F | 0.9671 | 0.0348 | F | |
| ABG | 0.9405 | 0.0420 | F | 0.9878 | 0.0356 | F | |
| ABCG | 0.9950 | 0.0288 | F | 0.9920 | 0.0422 | F | |
| f5 | AG | 0.9386 | 0.0152 | F | −0.9447 | 0.9784 | B |
| AB | 0.9480 | 0.0078 | F | −0.9259 | 0.9670 | B | |
| ABG | 0.9378 | 0.0362 | F | −0.9416 | 0.9658 | B | |
| ABCG | 0.9536 | 0.0227 | F | −0.9975 | 0.9999 | B |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Sun, Y.; Zhao, Y.; Zhu, X.; Xiong, P.; Yang, W.; Hou, J. A Fault Direction Discrimination Method for a Two-Terminal Weakly Fed AC System Using the Time-Domain Fault Model for the Difference Discrimination of Composite Electrical Quantities. Electronics 2025, 14, 2556. https://doi.org/10.3390/electronics14132556
Li L, Sun Y, Zhao Y, Zhu X, Xiong P, Yang W, Hou J. A Fault Direction Discrimination Method for a Two-Terminal Weakly Fed AC System Using the Time-Domain Fault Model for the Difference Discrimination of Composite Electrical Quantities. Electronics. 2025; 14(13):2556. https://doi.org/10.3390/electronics14132556
Chicago/Turabian StyleLi, Lie, Yu Sun, Yifan Zhao, Xiaoqian Zhu, Ping Xiong, Wentao Yang, and Junjie Hou. 2025. "A Fault Direction Discrimination Method for a Two-Terminal Weakly Fed AC System Using the Time-Domain Fault Model for the Difference Discrimination of Composite Electrical Quantities" Electronics 14, no. 13: 2556. https://doi.org/10.3390/electronics14132556
APA StyleLi, L., Sun, Y., Zhao, Y., Zhu, X., Xiong, P., Yang, W., & Hou, J. (2025). A Fault Direction Discrimination Method for a Two-Terminal Weakly Fed AC System Using the Time-Domain Fault Model for the Difference Discrimination of Composite Electrical Quantities. Electronics, 14(13), 2556. https://doi.org/10.3390/electronics14132556