1. Introduction
Geographic information system (GIS) technology has demonstrated unprecedented potential for enhancing geographic resource management efficiency and optimizing land resource allocation [
1,
2,
3]. In land resource management and cartography, area measurement serves as a critical parameter that profoundly influences regional planning, resource allocation, and utilization efficiency. Consequently, developing novel area measurement technologies is essential for addressing land management challenges, advancing precision agriculture, and driving innovation in modern surveying and mapping. Traditional area measurement methods—predominantly reliant on manual techniques and conventional instruments—exhibit inefficiency and significant errors, failing to meet modern agriculture’s precision management requirements. While satellite navigation-based area measurement instruments (e.g., GPS) have proliferated in recent years [
4,
5], these systems remain limited in their dynamic environment adaptability, complex-terrain processing, and resource utilization efficiency. Under weak signal conditions, issues such as insufficient satellite distribution density and pronounced multipath effects further degrade measurement accuracy.
To address these limitations, researchers globally have pursued continuous methodological refinements for complex scenarios and accuracy enhancement. In 2017, Chen et al. utilized S720 handheld GIS equipment to validate forestland measurement data, achieving a 4.55% accuracy through region-specific sampling point optimization; however, their static memory allocation strategy proved environmentally constrained [
6]. By 2019, Yang et al. developed a land area measurement instrument using the S1216F8 module and μC/OS-II system, incorporating a narrow-band bandpass filter to eliminate power–frequency interference and active potential shielding to mitigate weak signal leakage. While attaining 1.42% accuracy in open-field tests, persistent signal reception challenges under weak signal conditions remained unresolved [
7]. In 2020, Wang et al. proposed a dual-polarized antenna GPS signal reception algorithm that improved urban canyon positioning accuracy by 43.07% through multipath/non-line-of-sight (MP/NLOS) signal suppression, though area measurement applications were unexplored [
8]. Concurrently, Mohaddeseh et al. combined Type II fuzzy sets with wavelet transforms to boost GPS signal reception accuracy by 28.6% in high-noise environments, albeit with embedded deployment limitations due to algorithmic complexity [
9]. Collectively, these efforts prioritized hardware enhancements or signal-processing innovations to address weak signal constraints. Following the 2020 operationalization of the BeiDou-3 satellite constellation, research on BeiDou measurement accuracy has intensified, with growing applications in area measurement. For instance, Zhang et al. (2022) integrated the MC120M BeiDou module with Delaunay triangulation, achieving a 0.7% average error in multi-terrain farmland validation [
10]. Xiao et al. (2025) further resolved forest canopy signal occlusion via a BeiDou/inertial navigation integrated system, attaining a 3% positioning accuracy in coniferous, broad-leaved, and mixed forests [
11].
In this context, this design employs BeiDou navigation as its core positioning technology. The BeiDou system provides a physical layer solution for the weak signal environment through its unique technical architecture: its inclined geosynchronous orbit (IGSO) satellite forms high elevation coverage in the Asia–Pacific region, increasing the minimum number of visible satellites to eight [
12]. Its unique BDSBAS satellite-based augmentation service broadcasts differential correction parameters through GEO satellites, and the horizontal and vertical positioning accuracy is about 0.15 and 0.2 m [
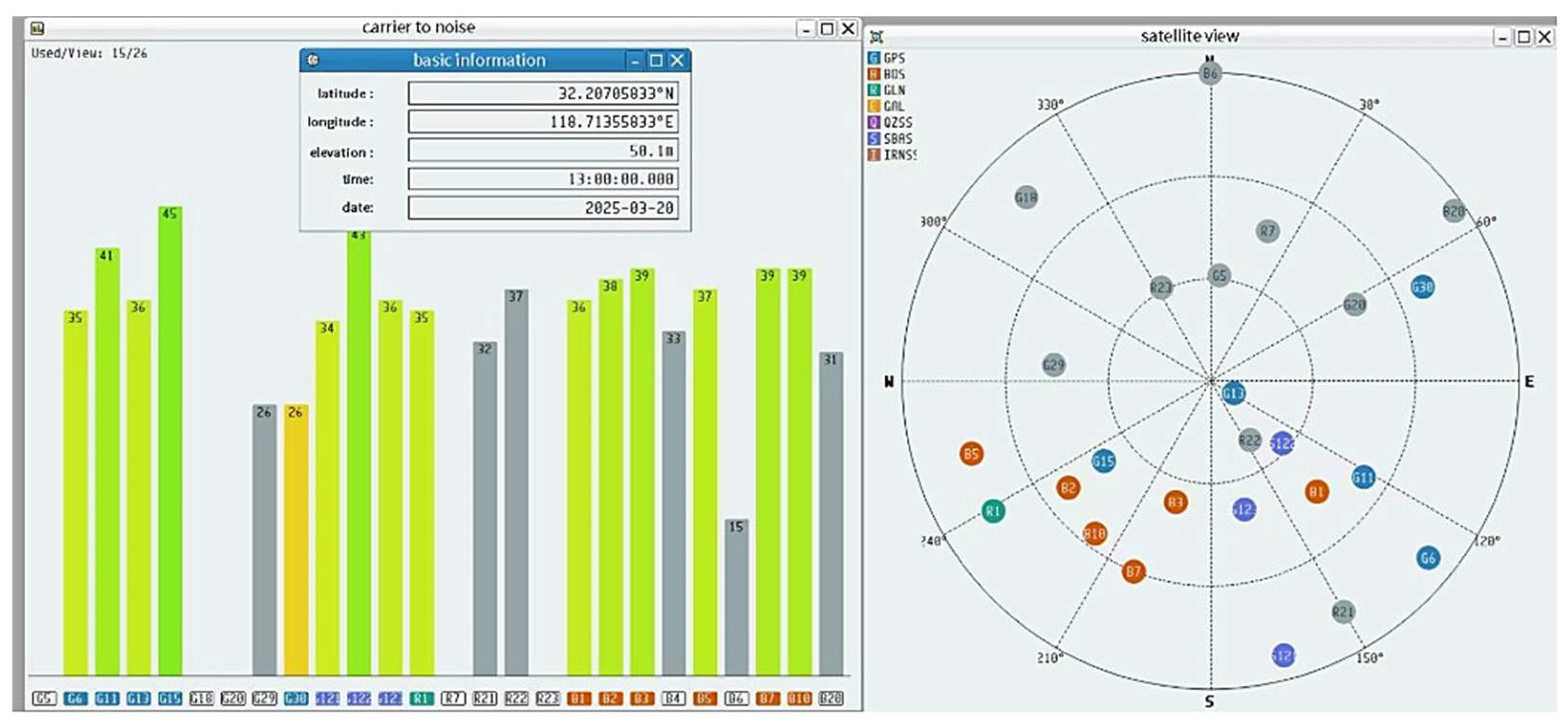
13]. A 72-h GNSS Toolkit 3 (Zhongke Microelectronics, Hangzhou, China) evaluation of satellite reception in
Figure 1 revealed stable visibility of 5–12 BeiDou satellites in Nanjing (vs. 4–11 for GPS), with most sustaining >25° elevation angles. Comparable carrier-to-noise ratios (C/N
0) of GPSs confirm BeiDou’s positioning robustness in Asia–Pacific regions, establishing a physical-layer foundation for complex-terrain performance.
Nevertheless, hardware-layer anti-interference capabilities necessitate complementary software-layer optimization. Although measurement accuracy continues to improve, most area measurement instruments employ static memory pre-allocation—a strategy ill-suited to dynamic sampling point variability, risking memory waste or stack overflow [
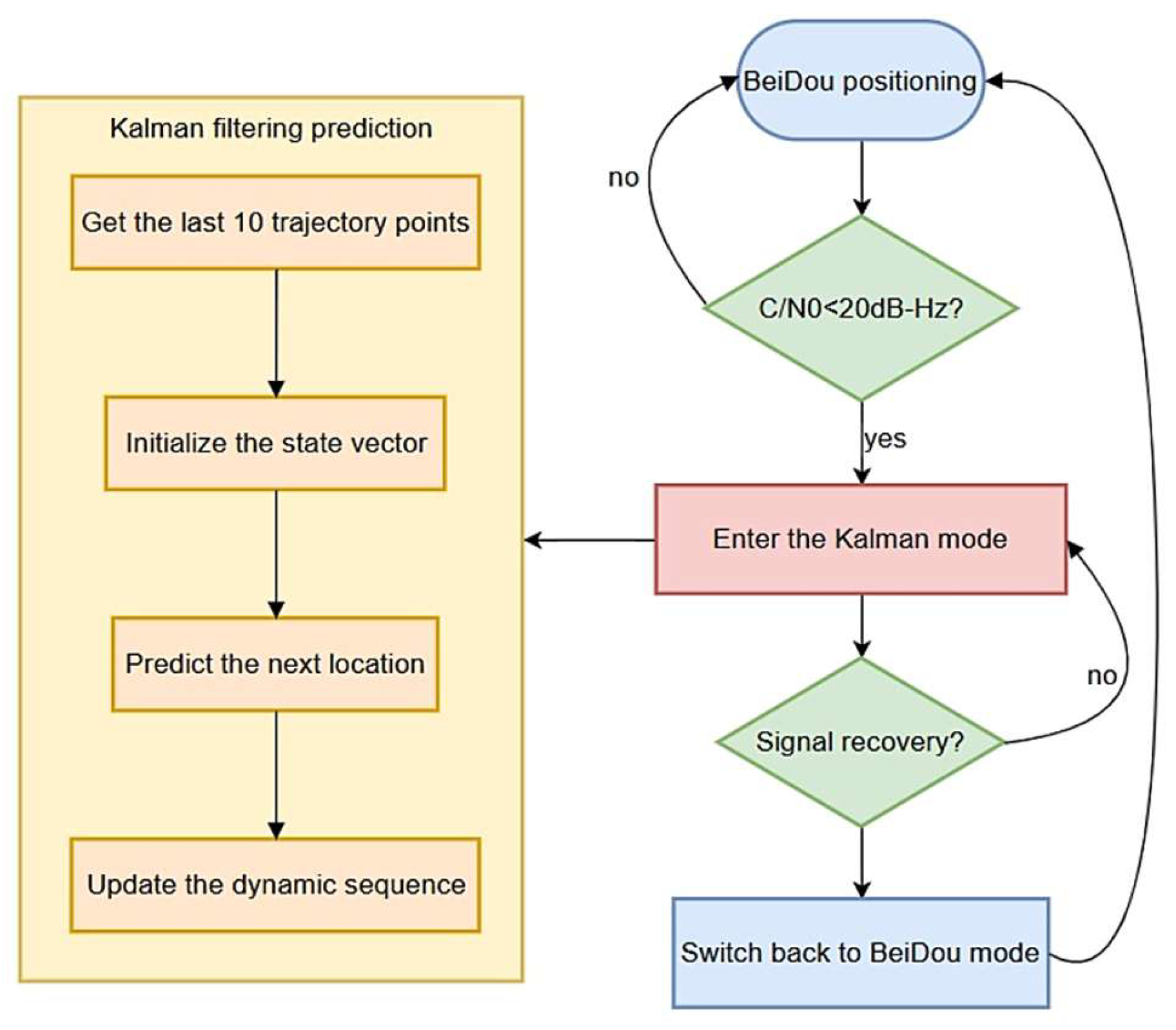
14]. In weak signal environments with intermittent connectivity, this approach may also cause sampling queue fragmentation. This study innovatively integrates dynamic memory management with BeiDou positioning: a FreeRTOS-based linear incremental allocation strategy enabled on-demand resource distribution while preventing memory fragmentation. During signal interruptions, Kalman prediction automatically filled data gaps, establishing a dual “hardware anti-interference + software fault-tolerance” safeguard.
Table 1 benchmarks this system against existing solutions.
In summary, to address demands for high precision, portability, and stability in area measurement, this paper presents an instrument integrating a domestic BeiDou positioning chip and an STM32 microcontroller (STMicroelectronics, Paris, France). The system leverages BeiDou positioning, FreeRTOS real-time operation, and dynamic memory management to significantly enhance flexibility and resource efficiency. Through precise data processing and adaptive resource strategies, it maintains high reliability even in unstable signal environments, overcoming traditional GPS limitations in signal-degraded areas. Users obtain rapid area measurements by traversing target perimeters with the handheld device, offering technical support for land resource planning, agricultural management, and surveying applications.
3. Hardware System Design
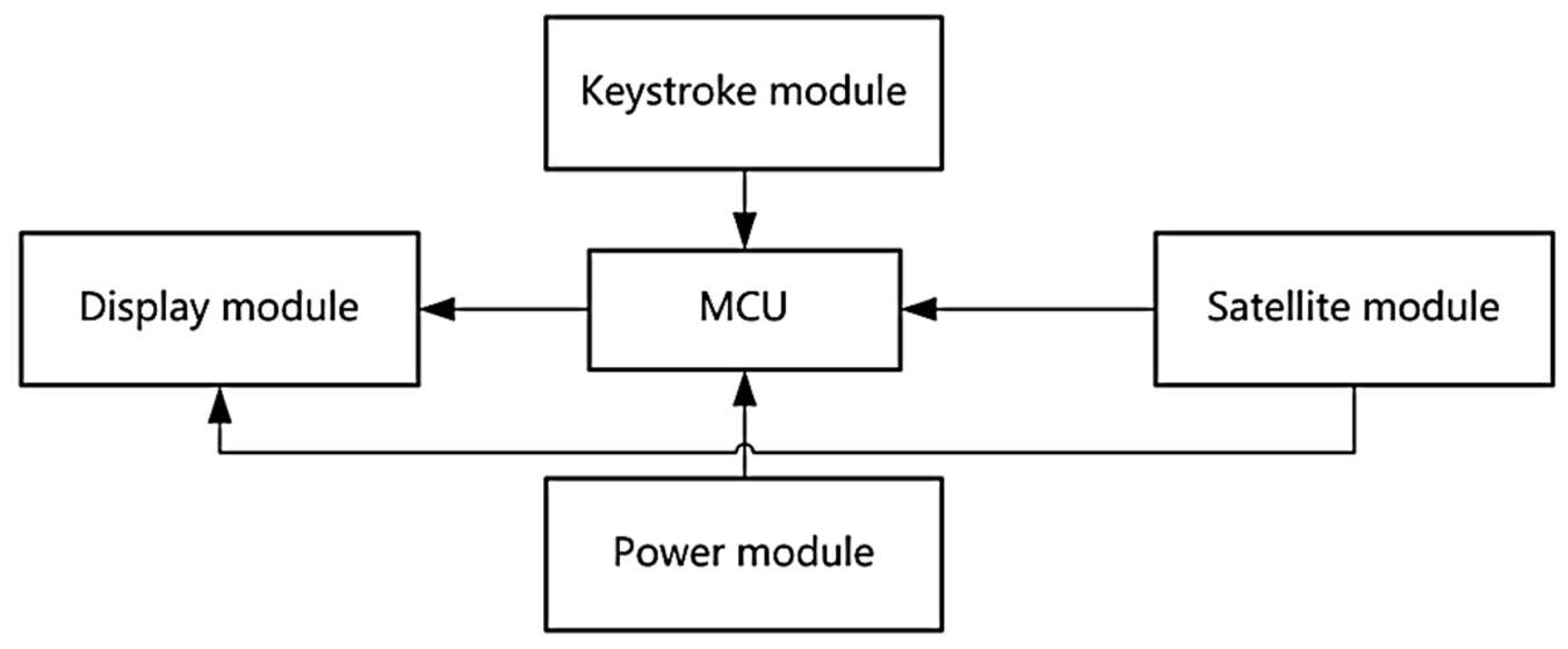
The system architecture comprises five integrated modules: microcontroller, power management, satellite navigation, OLED display, and key interface in
Figure 4.
The microcontroller (MCU) selects STM32 F103, which is a 32-bit MCU based on the ARM Cortex-M3 core (ARM, Cambridge, UK). It has high working frequency, rich memory, multiple peripheral interfaces and low power consumption characteristics.
The power supply system uses a DC 5 V power supply, and the voltage is stably converted to 3.3 V through the Texas Instruments TPS76133 chip (TI, Dallas, TX, America) to meet the working requirements of each module. The filter capacitor is added to the conversion circuit to ensure the stability of the power supply, reduce interference, and improve the reliability of the system [
19].
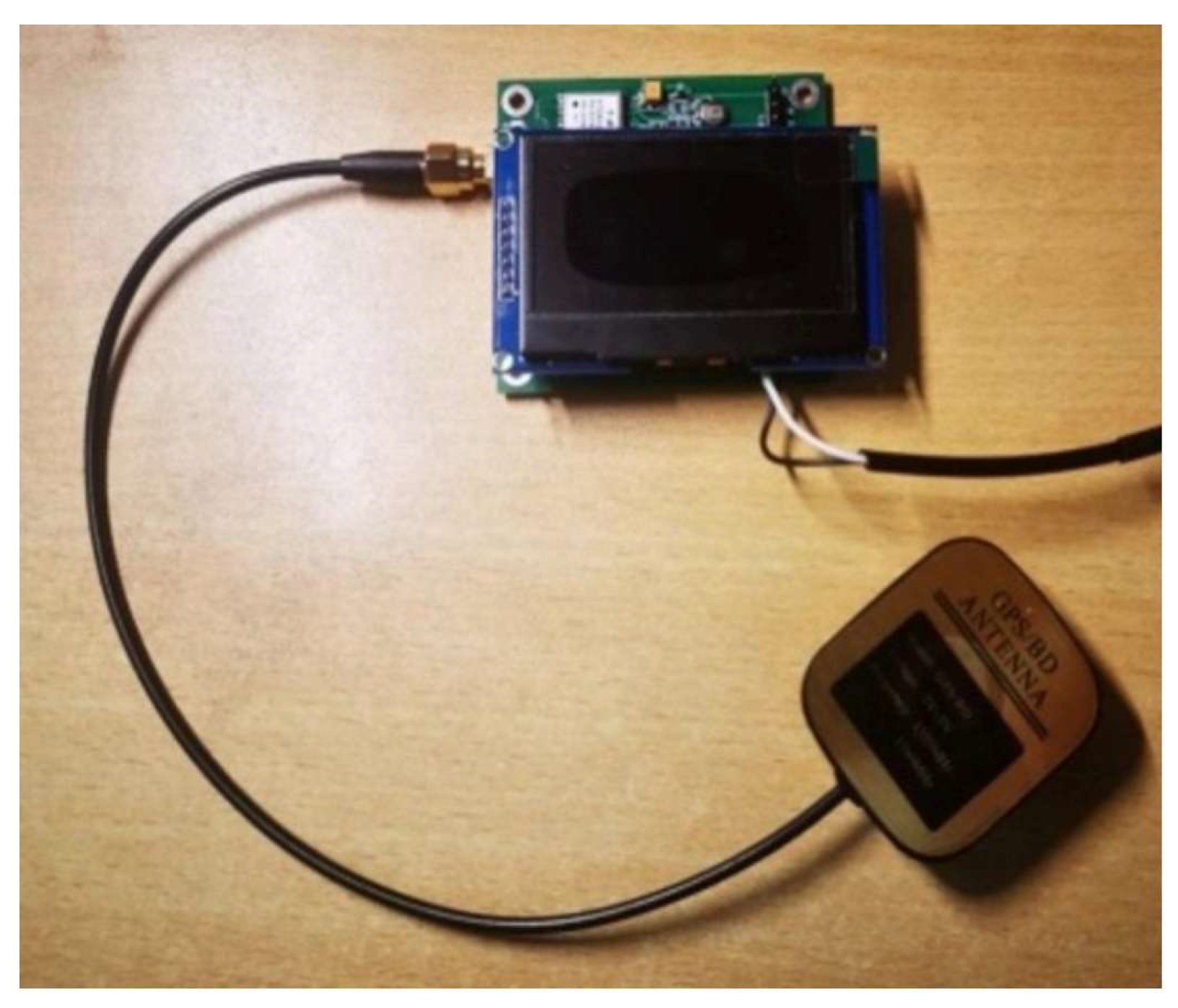
The core of the BDS satellite module is an ATGM332D chip (Zhongke Microelectronics, Hangzhou, China), which adopts a 40 nm RF-SoC process, and the cold start sensitivity is −148 dBm (2.3 dB higher than u-blox M8N). It has a unique BDSBAS satellite-based enhancement function through the GEO satellite broadcast differential correction number so that the single point positioning accuracy is from 3 m to 1.5 m. The built-in multipath suppression module of the chip adopts narrow correlator technology, which can reduce multipath error by more than 60% [
20]. The chip supports both active and passive antenna modules. This design uses an active SMA interface antenna; it is compared with the general u-blox NEO-M8N (GPS module) on the market. The comparison results are shown in
Table 2.
The liquid crystal display module adopts the 2.42-inch OLED liquid crystal display screen of Zhongjingyuan Electronics (Zhengzhou, China), which has the characteristics of high contrast, wide viewing angle and fast response. It can clearly display the measurement data, trajectory and other information, which is convenient for users to view in real time.
The key module is powered by +5 V DC, and the key processing thread reads each GPIO pin value circularly to realize the user‘s control of each functional thread, such as starting the measurement and ending the measurement. The operation is simple and the user experience is improved.
The overall hardware design is compact and the function is comprehensive, which provides a solid foundation for the accurate measurement and stable operation of the area measuring instrument.
Figure 5 is the hardware photo of the area measuring instrument.
5. Measurement and Analysis
5.1. Statistical Analysis Method
According to the accuracy evaluation standard, this experiment uses five independent measurements to evaluate the repeatability of the system. The calculation formulas for the standard deviation (σ) and coefficient of variation (CV) are as follows:
In the formula:
is a single measurement value, μ is the sample mean value,
n = 5. The Shapiro–Wilk test is used to verify the normality of the data. According to the critical value table of the Shapiro–Wilk test (sample size
n = 5, significance level α = 0.05), when the statistic W > 0.76, the assumption that the data obeys the normal distribution is accepted. The calculation formula of the W statistic is as follows [
31]:
In the formula: is a constant coefficient, is the order statistic, and is the sample mean.
5.2. Function and Precision Test
According to the real-time kinematic (RTK) technical specifications of the global navigation satellite system, the test environment is divided into two categories according to signal strength and terrain complexity: Class A (open flat area, satellite visibility > 80%) and Class B (urban canyon/dense forest area, satellite visibility < 50%). In order to comprehensively evaluate the environmental adaptability of the measurement system, three typical test scenarios were selected in this study: a standard football field (fully open environment), a campus dormitory (semi-closed environment), and a high-rise building intensive area with a weak signal. The test period covers different meteorological conditions, such as sunny, cloudy, and rainy, and repeated measurements are carried out at a fixed time of day to eliminate the daily periodic effect of ionospheric delay.
5.2.1. Football Field Test
A standard football field (with an actual area of 7140 m2) was selected as the reference test area. The area has no shelter and the elevation angle of the horizon is less than 10°, which ensures the complete reception of the satellite signal.
Table 4’s data show that the relative error of each measurement is controlled within 0.67%, which verifies the basic performance of the system in an ideal environment.
Figure 9 and
Figure 10 show the actual stepping point trajectory and the equipment drawing trajectory, respectively.
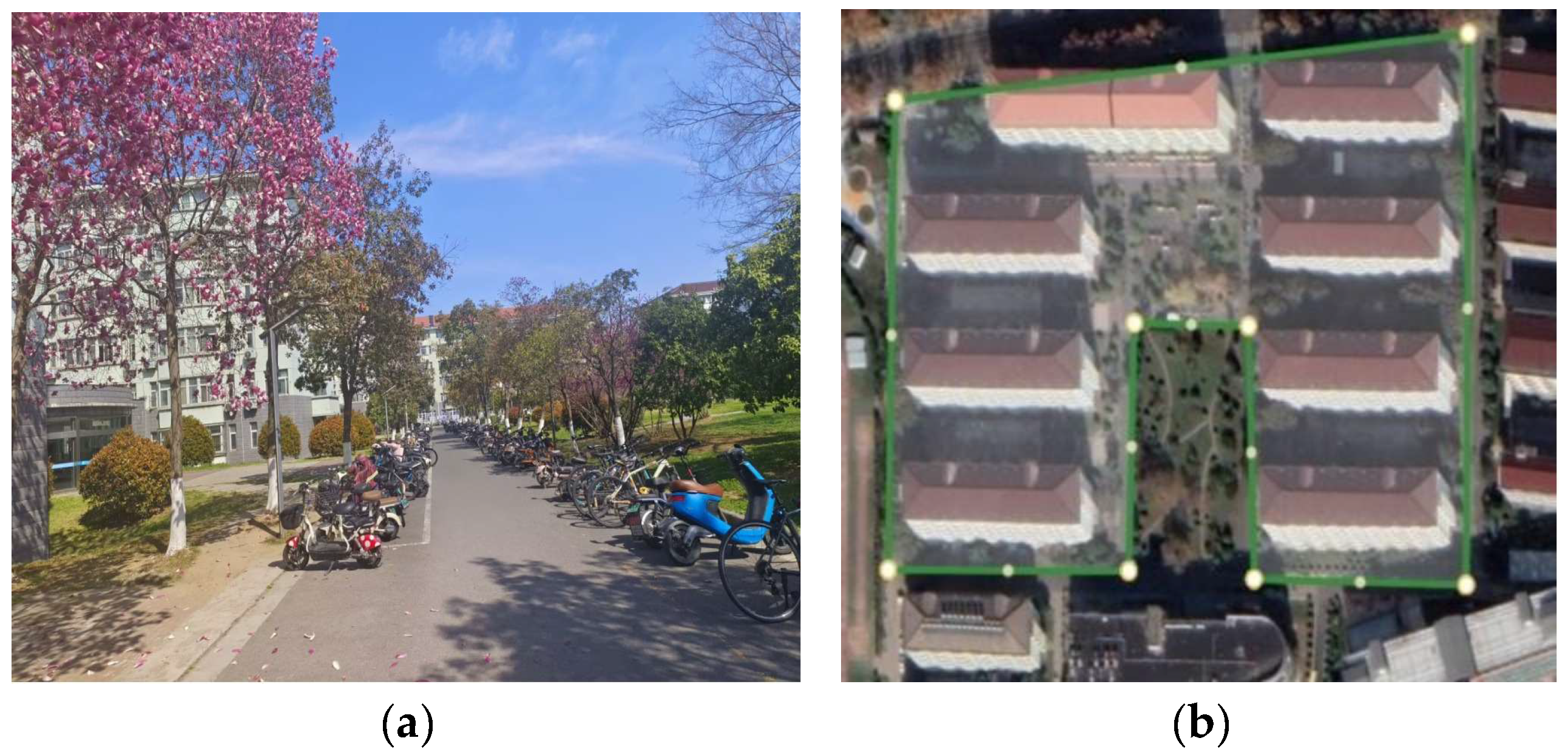
5.2.2. Dormitory Building Area
The second stage test was carried out in the campus dormitory building group area (actual area: 28,490 m2). The average building height in this area is 24 m, and there are many building corners. In terms of signal, due to shelters, such as buildings and trees, around the dormitory building, the satellite signal would be disturbed during the propagation process, resulting in signal attenuation and multipath effects, resulting in low and unstable signal strength received by the receiver.
The test results are shown in
Table 5, and the actual trajectory and test trajectory are shown in
Figure 11 and
Figure 12, respectively.
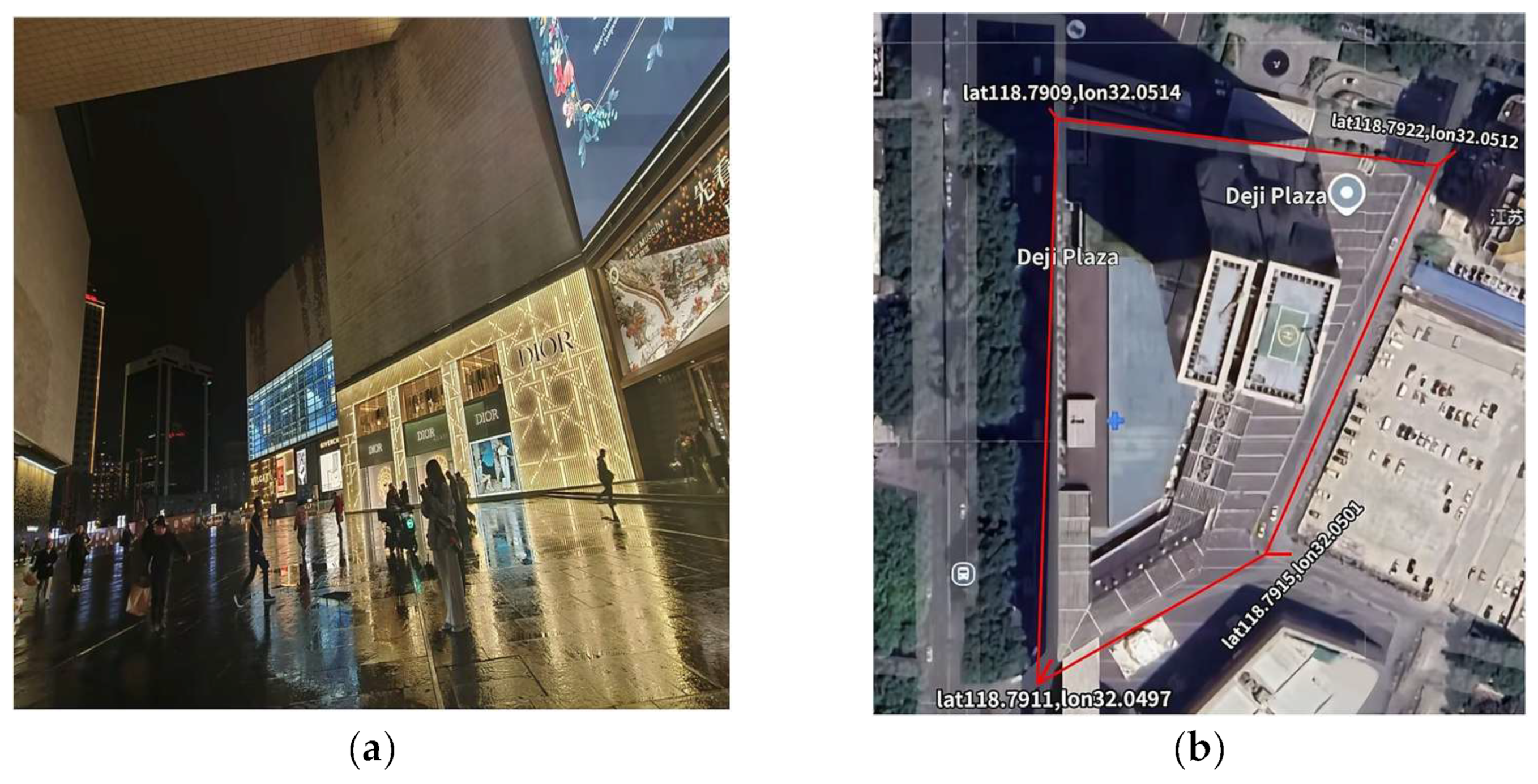
5.2.3. Downtown Area
Finally, we selected Deji Square in Xinjiekou, the busiest area in Nanjing, as a typical downtown test area in
Figure 13. The underground part of the square is connected to the subway station, the traffic is dense, and the electromagnetic interference is strong. The area is characterized by dense high-rise buildings, with an average building height of more than 200 m and a minimum building spacing of less than 15 m, forming a complex urban canyon environment. During the test, the number of visible BeiDou satellites was reduced to 5–8 (the GPS was 4–6 in the same period), the average carrier-to-noise ratio was 6.2 dB-Hz lower than that in the open area, and the multipath effect was significantly enhanced. The area data of five repeated measurements are shown in
Table 6. The comparison between the actual trajectory and the test trajectory is shown in
Figure 14. The maximum relative error of 2.72% verifies the reliability of the equipment in this signal attenuation environment.
5.3. Measurement Repeatability Analysis
In order to quantify the measurement repeatability, five independent samplings were performed on each scene. The calculated standard deviations σ are 28.9 m
2 (football field), 156.7 m
2 (dormitory area), and 547.8 m
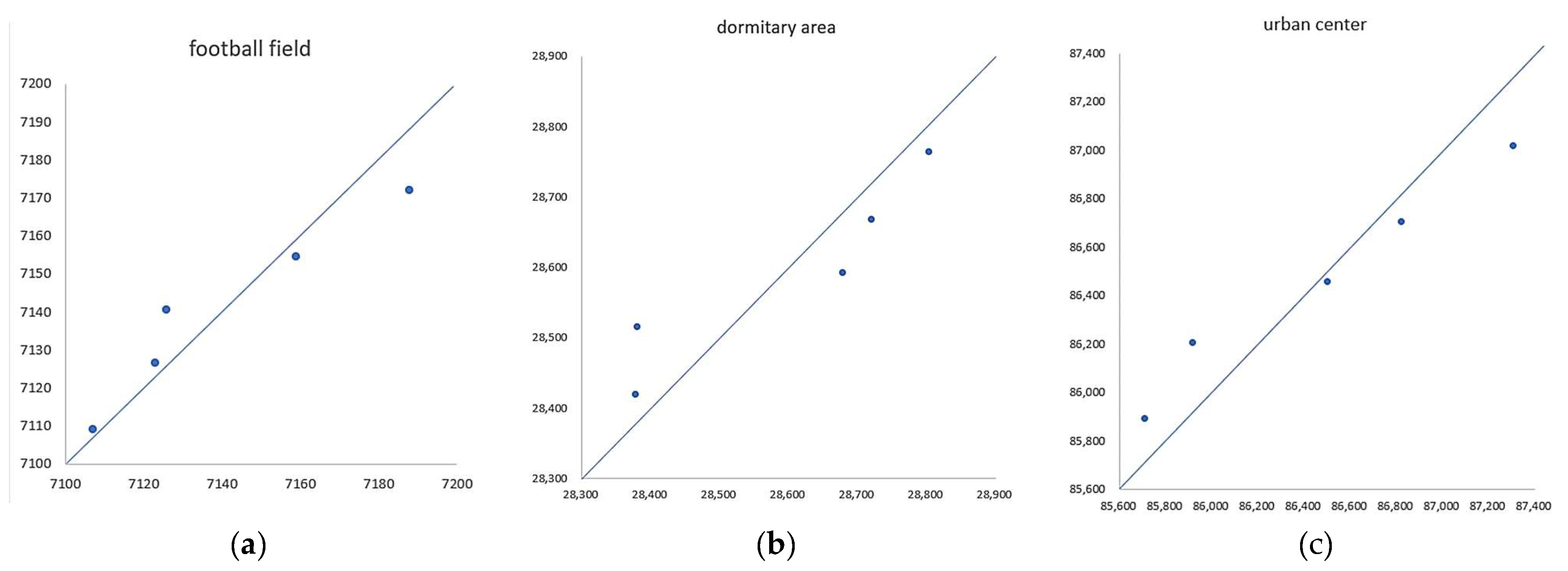
2 (downtown area), respectively, and the corresponding coefficient of variation CV = 0.40 ~ 0.64%, which is lower than the industry standard limit. The Q-Q plot of the three types of areas is shown in
Figure 15. Comparing the quantile of the measured value with the theoretical normal distribution, it can be seen that the scatter points are basically distributed along the y = x line. The Shapiro–Wilk normality test shows that a test statistic of W = 0.92–0.97 (critical value W
_ critical = 0.762,
n = 5, α = 0.05), a significance level of
p > 0.1, and assumes that the measured data obeys the normal distribution.
5.4. Signal Interruption Comparison Experiment
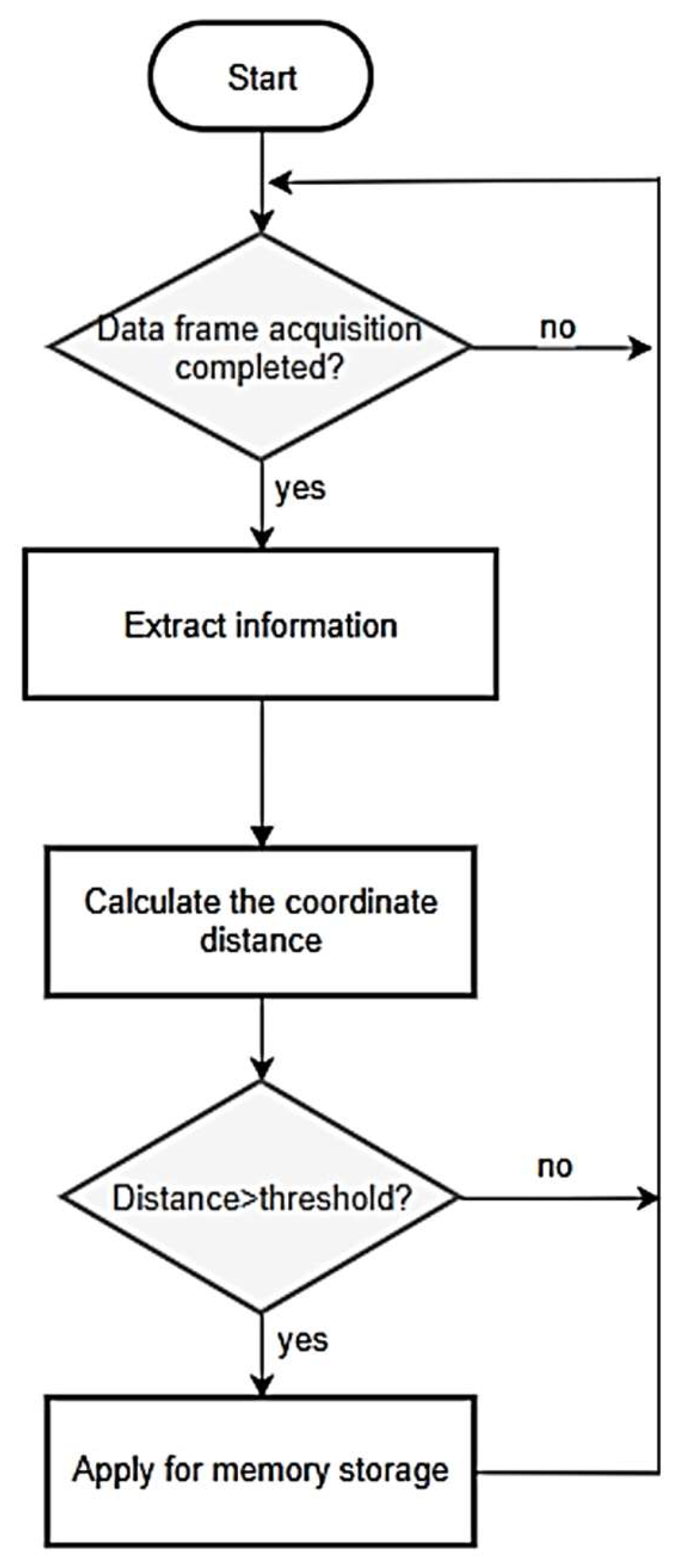
In order to verify the reliability of the “dynamic memory + Kalman filter” scheme in the signal interruption scenario, a comparative experiment was carried out in the Deji Square area (actual area: 85,000 m2). In the experiment, two additional control groups were set up to calculate and compare their area errors, and the number of memory allocation failures was counted through the FreeRTOS memory management hook function. The memory overflow rate is the number of allocation failures divided by the total number of allocations.
Control group 1: GPS + fixed memory: u-blox NEO-M8N module, memory pre-allocated 100 nodes
Control group 2: BeiDou + fixed memory: use ATGM332D chip (Zhongke Microelectronics, Hangzhou, China) but disable dynamic memory management, memory pre-allocated 100 nodes
This design: dynamic memory + Kalman filter mechanism
During the experiment, the antenna is occluded for ten seconds (analog signal interruption) after three minutes of measurement, and the measurement is repeated five times. The test results are shown in
Table 7.
Results analysis:
The advantages of a physical layer: The error of the BeiDou group is 12.9% lower than that of the GPS group, which verifies the reliability of the BeiDou satellite in a weak signal environment.
Software-layer enhancement: The dynamic memory scheme further compresses the error by 45.7%. There is no trajectory fracture in the experimental group, while the fixed memory group has an average data loss of 1.4 due to queue overflow caused by satellite positioning errors or signal interruption recovery.
5.5. Energy Consumption Assessment
In order to test the energy consumption of this design, we selected the GPS positioning module u-blox NEO-6M (u-blox, Thalwil, Switzerland) commonly used in the market to conduct power consumption comparison experiments with this design. The test platform selected was the laboratory digital–analog hybrid test platform ST3020, and it performed an FVMI analysis on standby mode (only maintaining the RTOS idling) and continuous positioning mode (1 Hz positioning + screen brightness), respectively. The power supply voltage was 3.3 V ± 1%, and the ambient temperature was 20 °C. The test results are shown in
Table 8.
5.6. Error Analysis
The above test results show that the designed area measuring instrument can achieve ideal measurement accuracy, but there are still small errors. The causes of area measurement error are mainly divided into hardware error and software error. The hardware errors of satellite and receiver are mainly related to the signal frequency, signal modulation mode, satellite, and receiver types. The type and positioning method of the receiver have a significant impact on the estimation of the region. For example, in the measurement area, the accuracy of differential GPS measurements is higher than that of autonomous positioning systems [
32]. The positioning error of satellite navigation is mainly divided into satellite errors, propagation errors, and receiving errors, which are generated by different hardware modules during propagation, measurement or reception [
33,
34]. Software errors mainly come from the discretization of the area by the numerical method, which leads to a reduction in accuracy. For this kind of error, the accuracy error caused by noise interference and the multipath effect of the satellite signal can be reduced by replacing the satellite receiving module with higher accuracy or improving the filtering algorithm [
35].
In summary, through hardware upgrades and algorithm optimization, as well as the unique advantages of the BeiDou system, we can further reduce the error range and improve the overall measurement accuracy and reliability of the area measuring instrument.
6. Conclusions
This paper designed and implemented an area measuring instrument based on an STM32 microcontroller and a high-precision BeiDou positioning chip, which solves the accuracy problem of traditional area measuring tools in weak signal environment.
In terms of hardware, we introduced a high-performance BeiDou positioning chip, which still has a high accuracy and stability of measurement in complex environments. In the software design, we used a FreeRTOS real-time operating system to achieve efficient scheduling and management of tasks, and ensure the real-time and response speed of the system. In addition, the application of dynamic memory management technology overcomes the limitations of traditional static memory allocation and improves the flexibility and resource utilization of the system.
The experimental results show that the average relative error of the measuring instrument in open terrain is 0.37%, and the maximum relative error in complex environments, such as urban canyons, is 2.72%, which is lower than the 5% threshold specified in the global navigation satellite system (GNSS) receiver calibration specification. Compared with traditional GPS equipment, it still maintains high precision and high stability under weak signal conditions, showing better environmental adaptability. In summary, the area measuring instrument designed in this paper has achieved results in terms of technological innovation and experimental verification, and provides for land and resource planning, agricultural management, and surveying and mapping exploration.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}