
Adaptive Transient Damping Control Strategy of VSG System Based on Dissipative Hamiltonian Neural Network

Abstract
1. Introduction
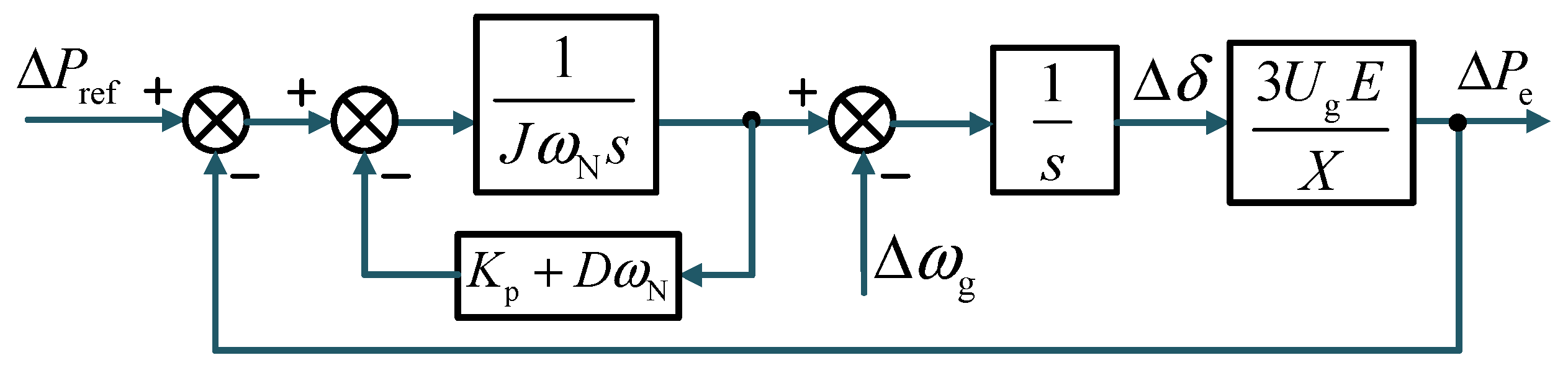
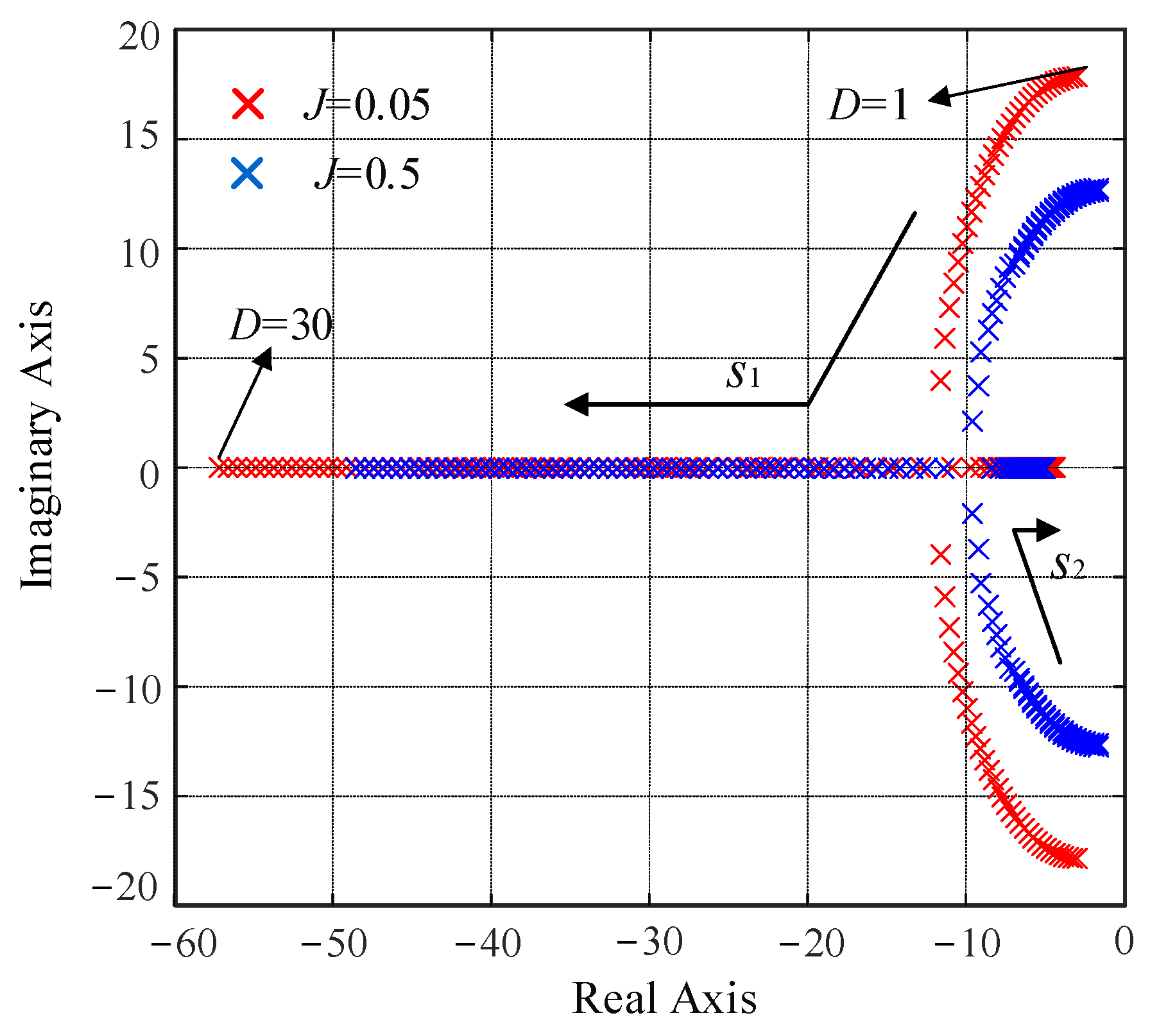
2. VSG Control Principle and Performance Analysis
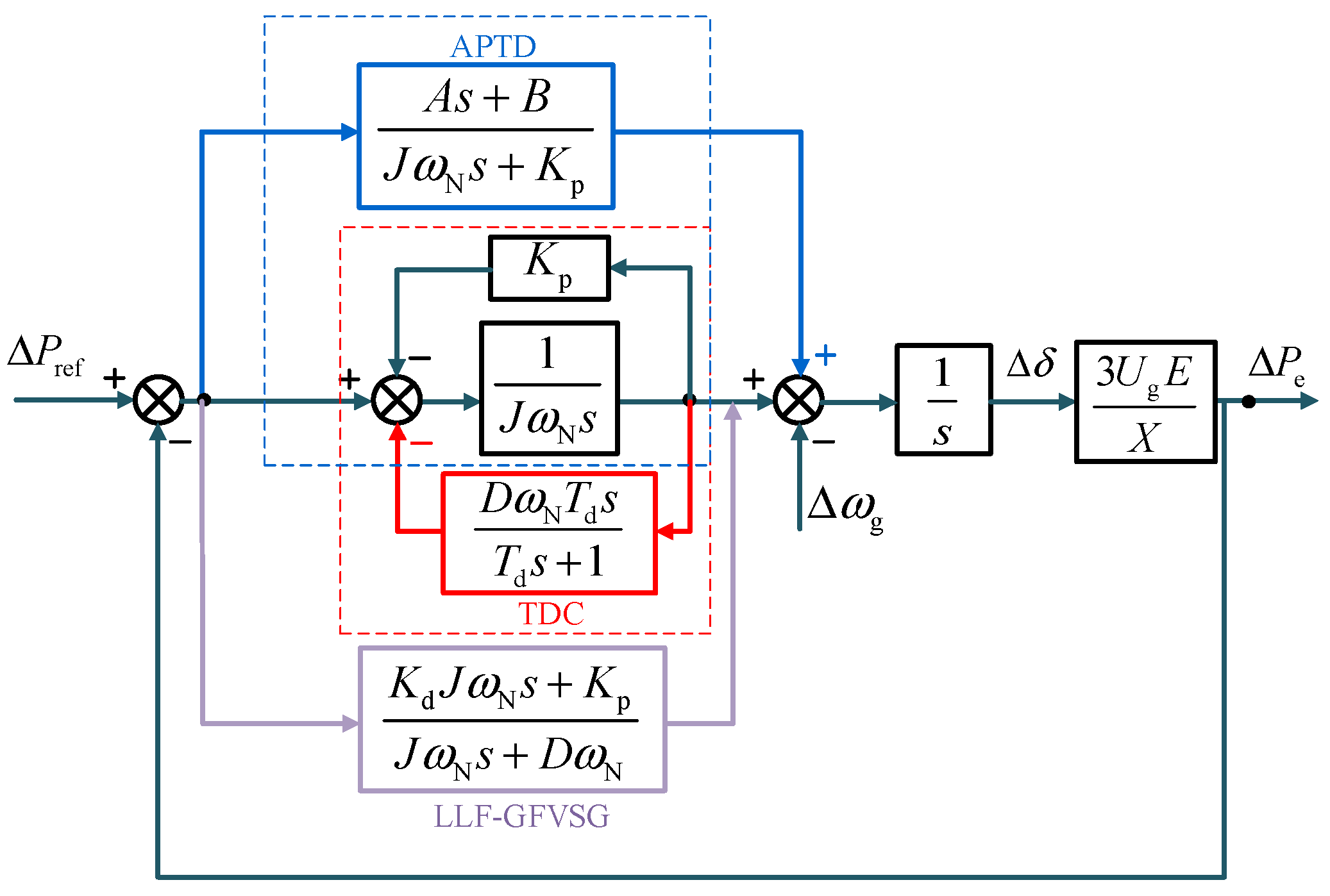
3. Transient Damping Enhanced VSG Control
Transient Damping Enhancement Method and Stability Analysis
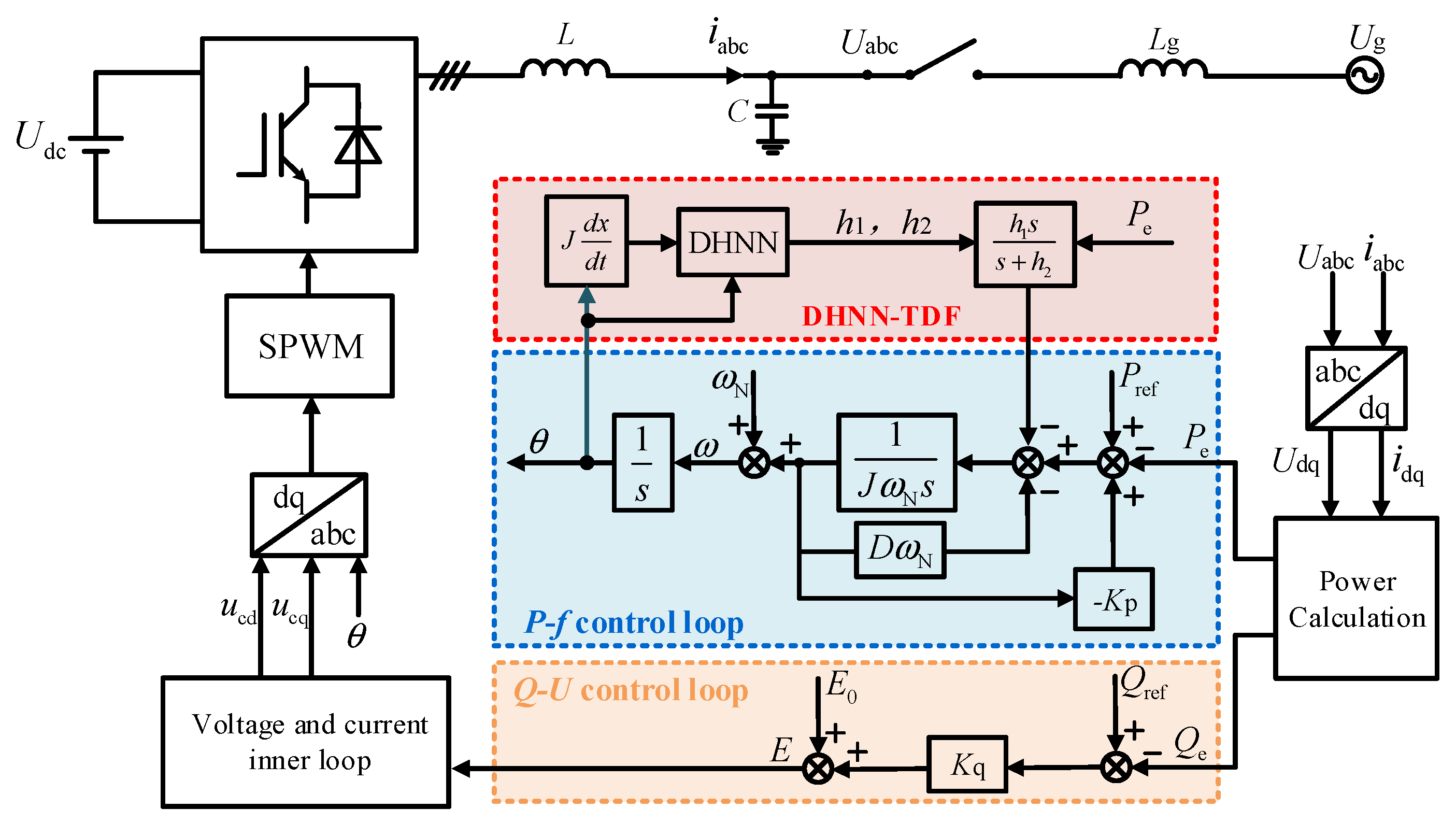
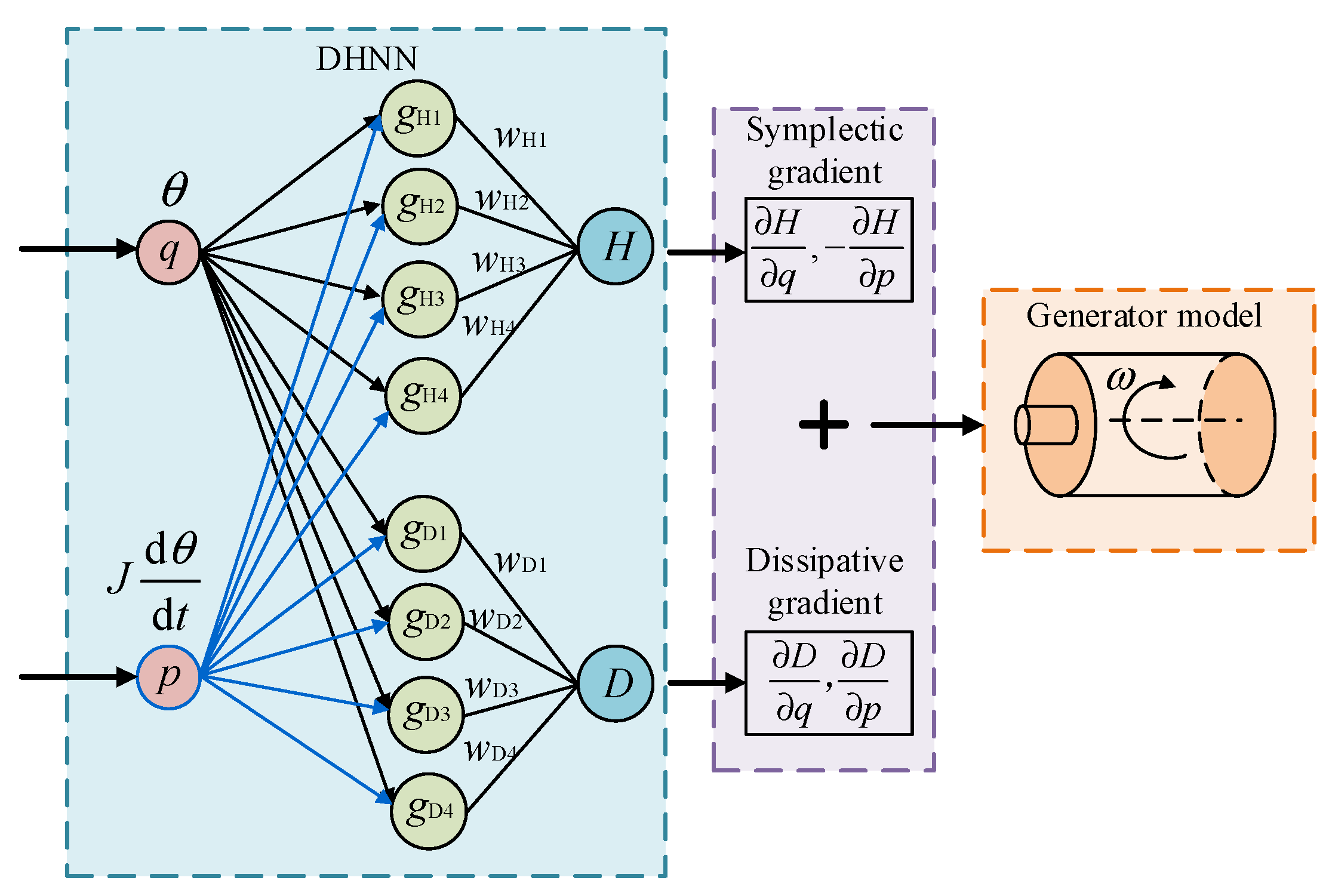
4. Dissipative Hamiltonian Neural Network-Based TDF-VSG Control Strategy
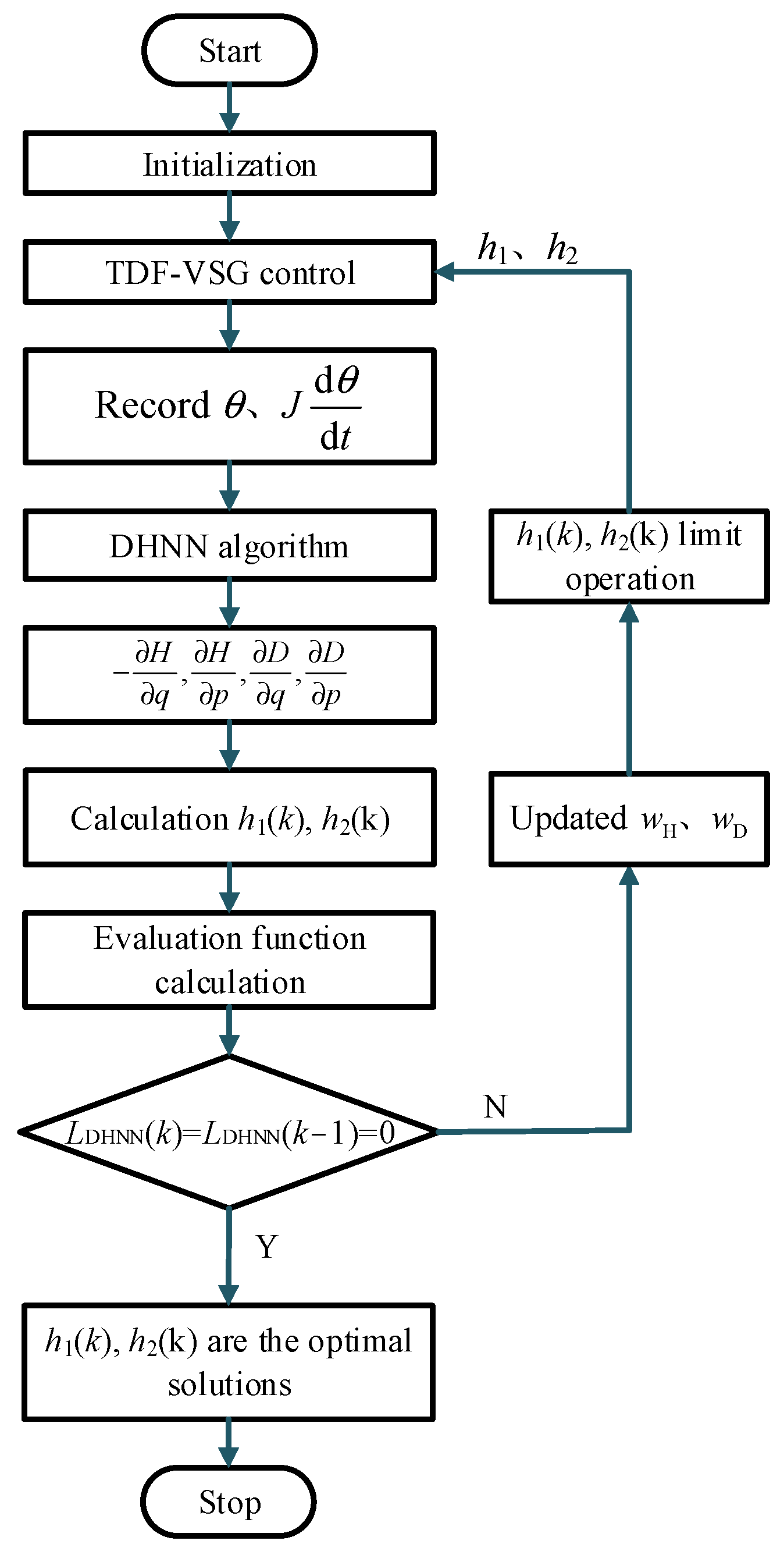
- (1)
- Parameter Initialization: The algorithm requires setting the initial transient damping parameters h1, h2 and the initial weights wH, wD. This study employs the Xavier initialization method, where weights are initialized as normally distributed signals with a mean of 0 and variance of 2/(nin + nout). This ensures consistent variance in the data during forward propagation and gradients during backpropagation in the early stages of network learning, thereby accelerating convergence and enhancing the stability. The weight initialization formula is given by
- (2)
- TDF-VSG Control: The transient damping parameters (either initial or real-time-adjusted) output by the DHNN are introduced into the TDF branch to improve the VSG control system. Meanwhile, the θ value from the VSG active power control loop is processed and fed into the DHNN.
- (3)
- DHNN Forward Computation: the Hamiltonian H(p,q) and dissipation function D(p,q) are computed through Equations (16)–(22).
- (4)
- Dynamic Calculation of Transient Damping Parameters: based on the dissipation function obtained in step (3), the transient damping parameters h1 and h2 are calculated using Equation (24).
- (5)
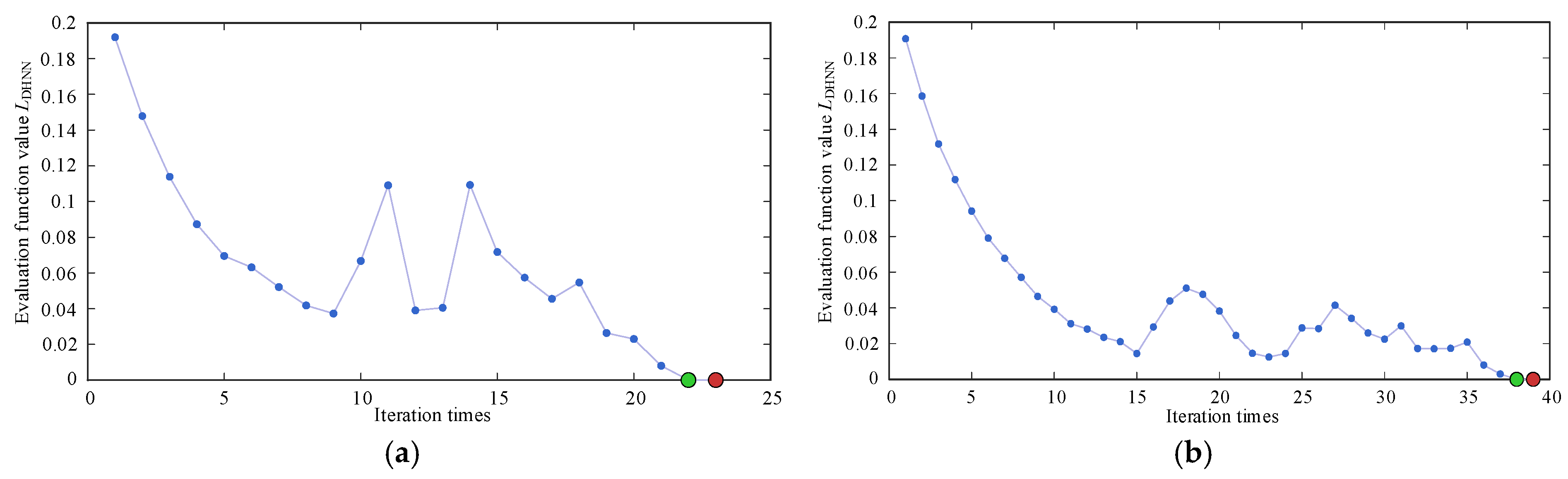
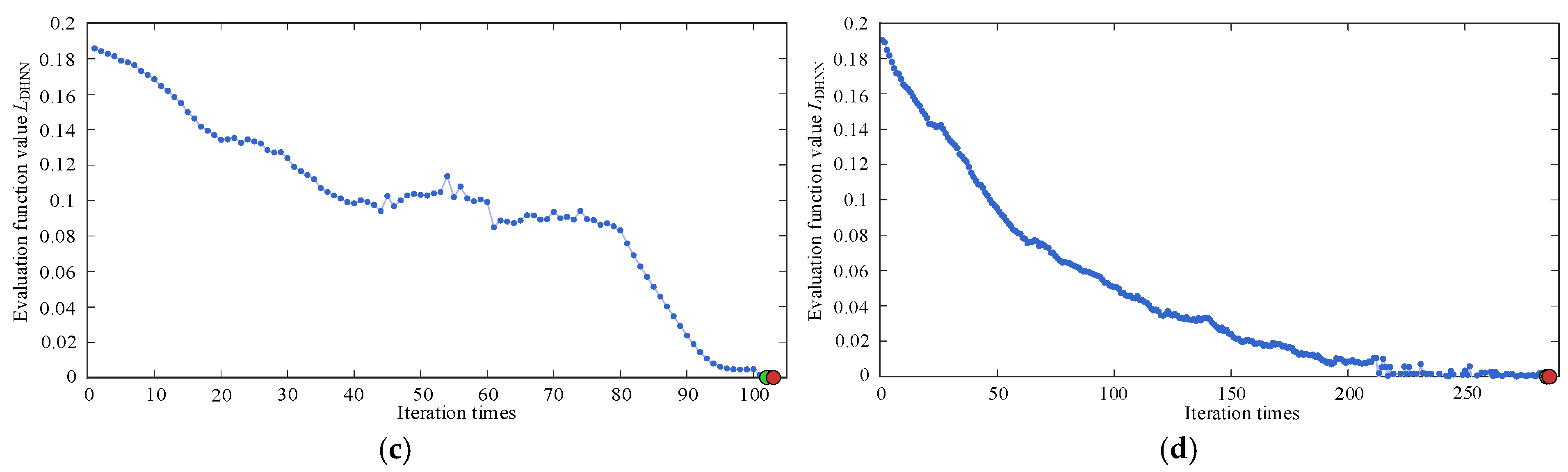
- Evaluation Function Calculation and Weight Update: The evaluation function value for the current time step is computed using Equation (25). If the stopping criterion is not met (i.e., when the evaluation function values of both the current and previous iterations are not equal to zero), the weights are updated using Equation (26). The transient damping parameters h1 and h2 obtained in step (4) are then output to the TDF-VSG control loop to complete the closed-loop control.
- (6)
- Algorithm Termination and Triggering: The parameter optimization process terminates when the evaluation function meets the stopping criterion, at which point the transient damping parameters represent the optimal solution. The DHNN training process is re-triggered when grid disturbances are detected by the system.
5. Simulation and Experimental Verification
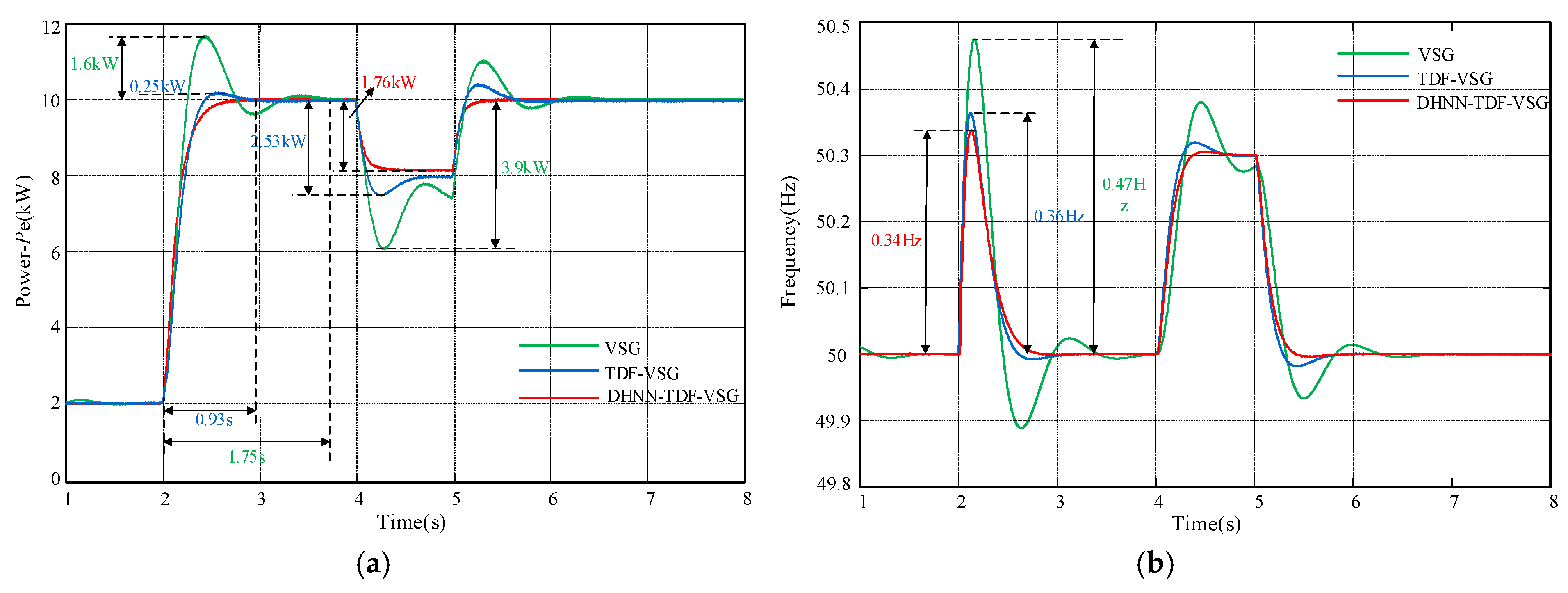
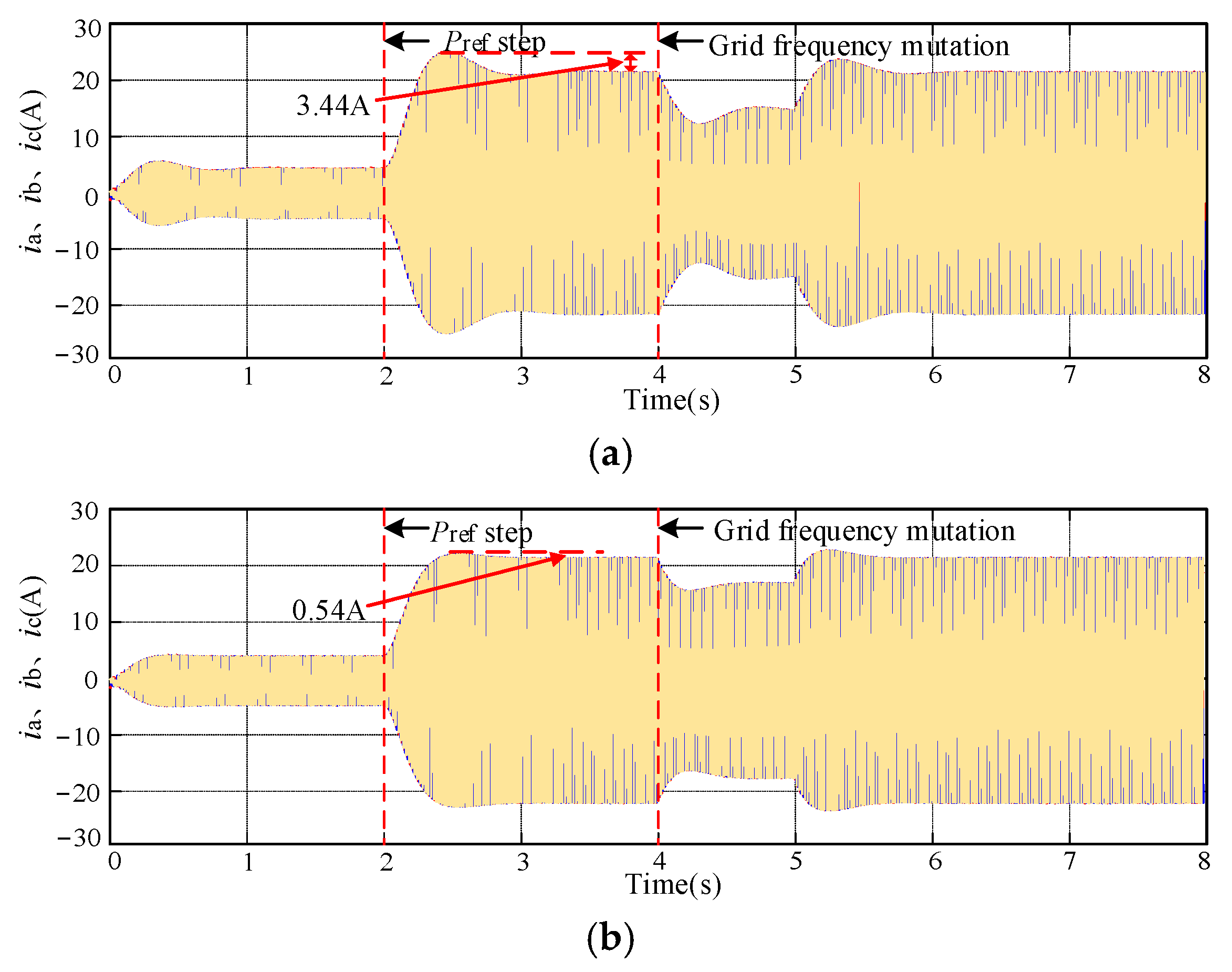
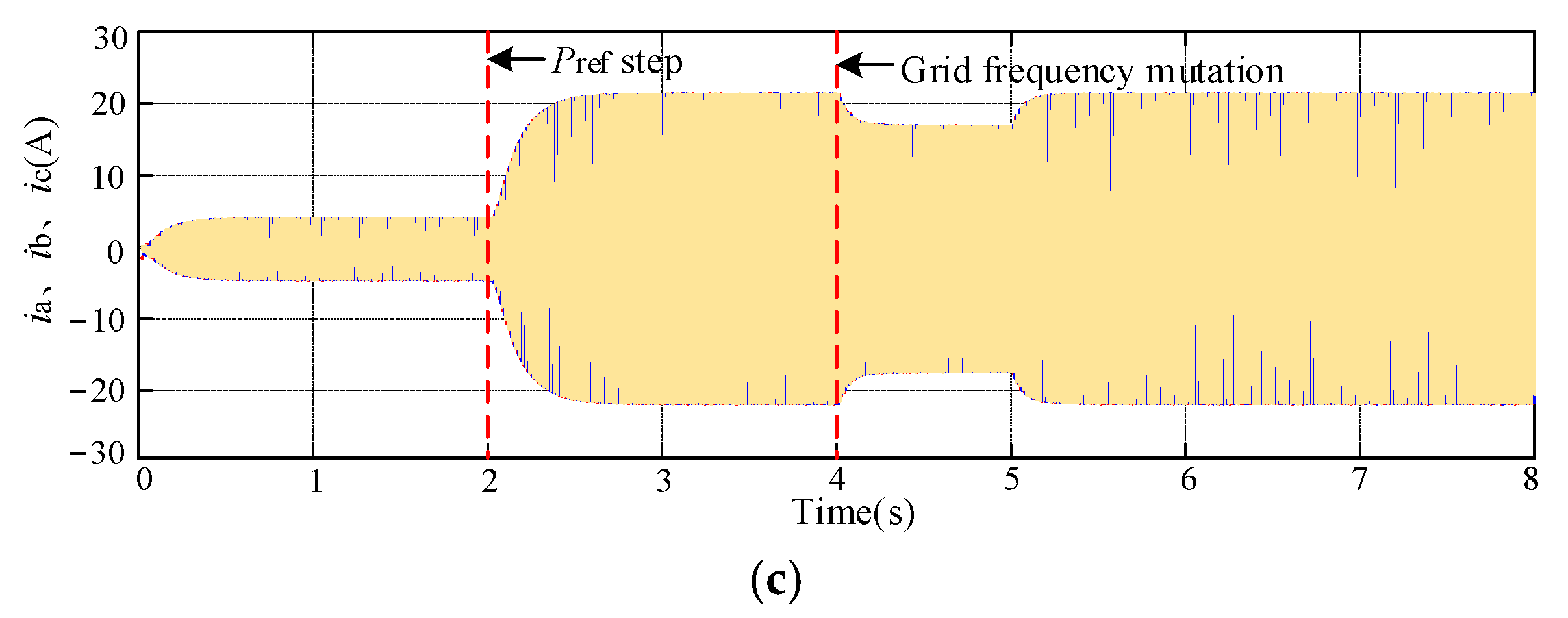
5.1. Comparative Analysis of Different Control Strategies Through Simulation
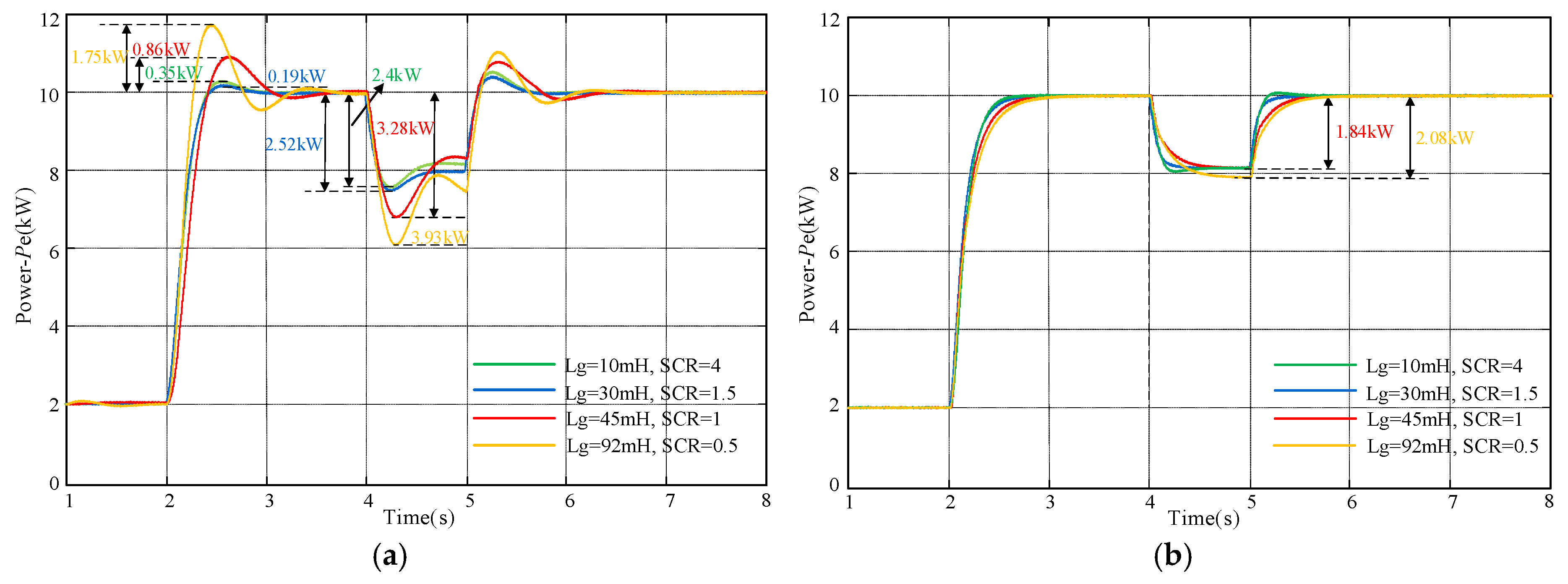
5.2. Comparative Robustness Analysis of Control Strategies Under Different Grid Strength Conditions
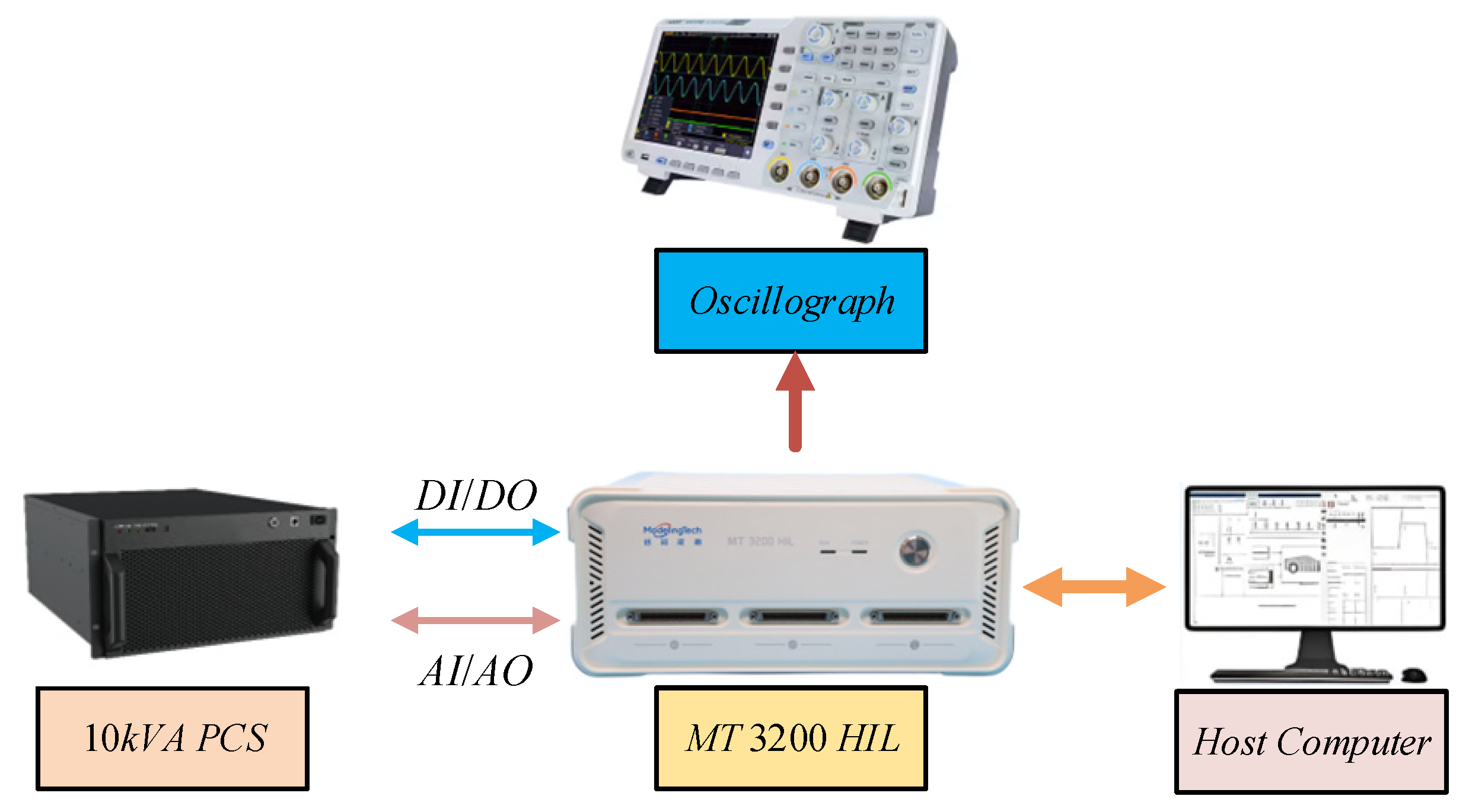
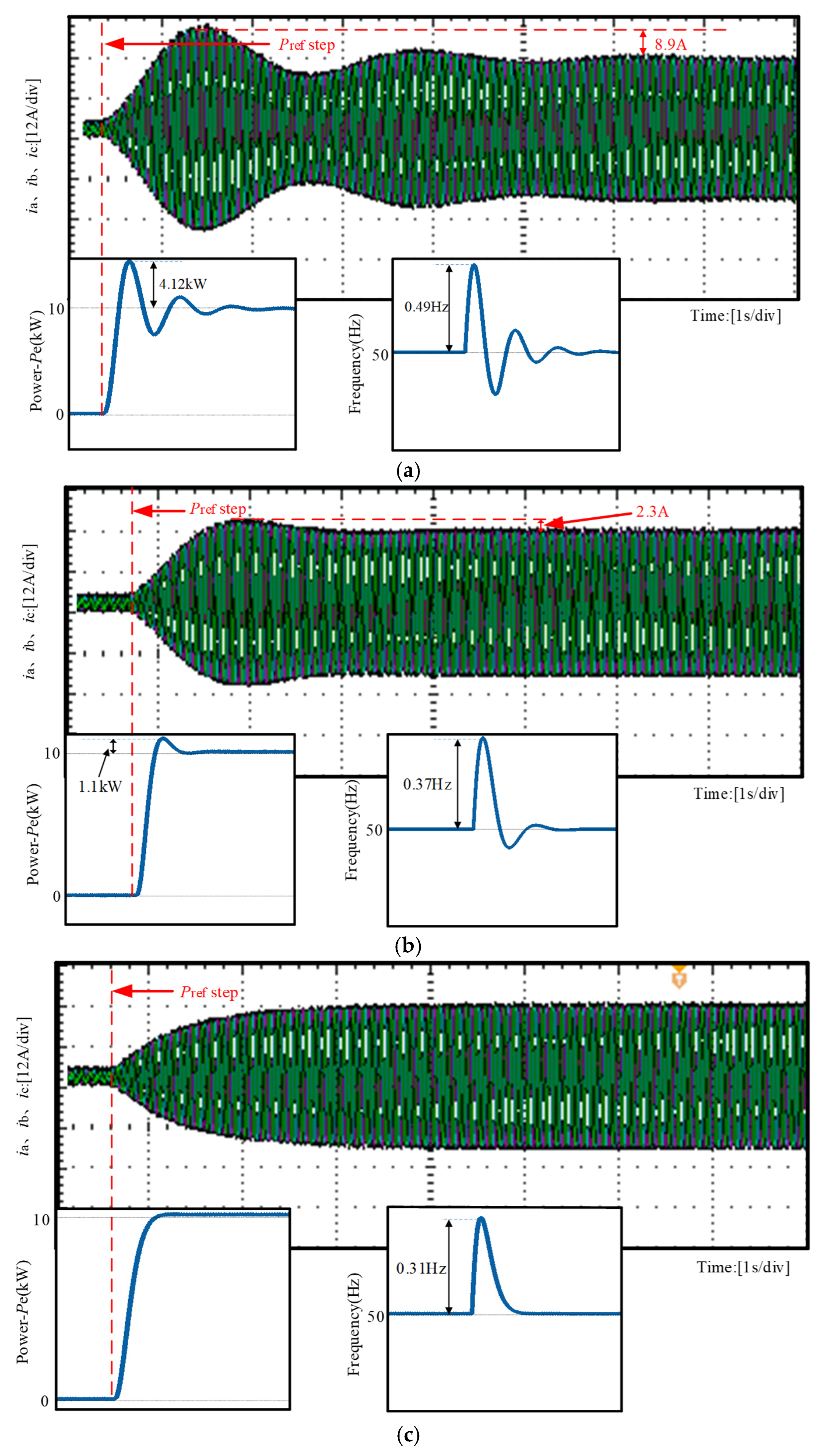
5.3. Comparative Analysis of Experiments Under Different Control Strategies
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Xie, B.; Zheng, W.; Li, P.; Shi, Y.; Su, J. Stability analysis and admittance reshaping for PQ inverters with different power control methods. Int. J. Electr. Power Energy Syst. 2025, 166, 110541. [Google Scholar] [CrossRef]
- Zheng, Y.; Han, Y.; Wang, C.; Ren, Q.; Yang, P.; Zalhaf, A.S. Impact of phase-locked loop on grid-connected inverter stability under weak grid conditions and suppression measures. Comput. Electr. Eng. 2025, 123, 110249. [Google Scholar] [CrossRef]
- Su, Z.; Yang, G.; Yao, L. Transient Frequency Modeling and Characteristic Analysis of Virtual Synchronous Generator. Energies 2025, 18, 1098. [Google Scholar] [CrossRef]
- Yin, J.; Chen, Z.; Qian, W.; Zhou, S. A Virtual Synchronous Generator Low-Voltage Ride-Through Control Strategy Considering Complex Grid Faults. Appl. Sci. 2025, 15, 1920. [Google Scholar] [CrossRef]
- Mousavi, H.M.; Moradi, H. Simultaneous compensation of distorted DC bus and AC side voltage using enhanced virtual synchronous generator in Islanded DC microgrid. Int. J. Electron. 2025, 112, 151–176. [Google Scholar] [CrossRef]
- Shi, R.; Lan, C.; Dong, Z.; Yang, G. An Active Power Dynamic Oscillation Damping Method for the Grid-Forming Virtual Synchronous Generator Based on Energy Reshaping Mechanism. Energies 2023, 16, 7723. [Google Scholar] [CrossRef]
- Mehdi, P.; Mohammadreza, T. Designing a central MIMO state feedback controller for a microgrid with multi-parallel VSGs to damp active power oscillations. Int. J. Electr. Power Energy Syst. 2021, 133, 106984. [Google Scholar]
- Shuai, Z.; Huang, W.; Shen, Z.J.; Luo, A.; Tian, Z. Active Power Oscillation and Suppression Techniques Between Two Parallel Synchronverters During Load Fluctuations. IEEE Trans. Power Electron. 2020, 35, 4127–4142. [Google Scholar] [CrossRef]
- Xia, Y.; Wang, Y.; Chen, Y.; Shi, J.; Yang, Y.; Li, W.; Li, K. A Cooperative Adaptive VSG Control Strategy Based on Virtual Inertia and Damping for Photovoltaic Storage System. Energies 2025, 18, 1505. [Google Scholar] [CrossRef]
- Soni, N.; Doolla, S.; Chandorkar, M.C. Improvement of Transient Response in Microgrids Using Virtual Inertia. IEEE Trans. Power Deliv. 2013, 28, 1830–1838. [Google Scholar] [CrossRef]
- Ashabani, M.; Mohamed, Y.A.R.I. Integrating VSCs to Weak Grids by Nonlinear Power Damping Controller with Self-Synchronization Capability. IEEE Trans. Power Syst. A Publ. Power Eng. Soc. 2014, 29, 805–814. [Google Scholar] [CrossRef]
- Zhang, L.; Shi, R.; Li, J.; Yu, Y.; Zhang, Y. Improved Strategy of Grid-Forming Virtual Synchronous Generator Based on Transient Damping. Energy Eng. 2024, 121, 3181–3197. [Google Scholar] [CrossRef]
- Shi, R.; Lan, C.; Huang, J.; Ju, C. Analysis and Optimization Strategy of Active Power Dynamic Response for VSG under a Weak Grid. Energies 2023, 16, 4593. [Google Scholar] [CrossRef]
- Xia, Y.; Chen, Y.; Wang, Y.; Chen, R.; Li, K.; Shi, J.; Yang, Y. A Virtual Synchronous Generator Control Strategy Based on Transient Damping Compensation and Virtual Inertia Adaptation. Appl. Sci. 2025, 15, 728. [Google Scholar] [CrossRef]
- Qian, J.; Xu, L.; Ren, X.; Wang, X. Structured Deep Neural Network-Based Backstepping Trajectory Tracking Control for Lagrangian Systems. IEEE Trans. Neural Netw. Learn. Systems 2024, 10, 1109. [Google Scholar] [CrossRef]
- Marco, D.; Florian, M. Symplectic learning for Hamiltonian neural networks. J. Comput. Phys. 2023, 494, 112495. [Google Scholar]
- Stegink, T.; Persis, D.C.; Schaft, D.V.A. Port-Hamiltonian Formulation of the Gradient Method Applied to Smart Grids. IFAC Pap. 2015, 48, 13–18. [Google Scholar] [CrossRef]
- Yang, B.; Li, H.; Zhang, Y.; Lu, S. Grid frequency disturbance analysis based virtual synchronous generator transient performance improvement control. Int. J. Electr. Power Energy Syst. 2025, 166, 110572. [Google Scholar] [CrossRef]
- Gurski, E.; Kuiava, R.; Perez, F.; Benedito, R.A.; Damm, G. A Novel VSG with Adaptive Virtual Inertia and Adaptive Damping Coefficient to Improve Transient Frequency Response of Microgrids. Energies 2024, 17, 4370. [Google Scholar] [CrossRef]
- Cheng, X.; Wang, L.; Cao, Y. Quadrature Based Neural Network Learning of Stochastic Hamiltonian Systems. Mathematics 2024, 12, 2438. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Ding, Q.; Chu, B. Dissipative Hamiltonian realisation and decentralised saturated control of multi-machine multi-load power systems. IET Control Theory Appl. 2013, 7, 1287–1293. [Google Scholar] [CrossRef]
- Fan, B.; Huang, G.; Sun, L.; Zhao, Y.; Zhou, H.; Wang, J. Disturbance Rejection Control Method Based on Variable Damping and Port Controlled Hamiltonian with Dissipation Model for Induction Drive Motor. Int. J. Precis. Eng. Manuf. 2023, 24, 2009–2019. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value | Parameter | Numerical Value |
|---|---|---|---|
| Udc/V | 800 | J/(kg·m2) | 0.1 |
| Ug/V | 380 | Kp | 200 |
| E0/V | 311 | D/(N·m·s·rad−1) | 15 |
| ωN/(rad/s) | 314 | L/mH | 3 |
| Lg/mH | 30 | C/μF | 10 |
| Parameter | Numerical Value | Parameter | Numerical Value |
|---|---|---|---|
| Learning rate η | 0.08 | Maximum h1 | 15 |
| Inertial coefficient α | 0.6 | Minimum h1 | 7 |
| Initial value h1 | 10 | Maximum h2 | 100 |
| Initial value h2 | 80 | Minimum h2 | 70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Zhou, S.; Chen, S.; Sun, Y. Adaptive Transient Damping Control Strategy of VSG System Based on Dissipative Hamiltonian Neural Network. Electronics 2025, 14, 2207. https://doi.org/10.3390/electronics14112207
Zhou J, Zhou S, Chen S, Sun Y. Adaptive Transient Damping Control Strategy of VSG System Based on Dissipative Hamiltonian Neural Network. Electronics. 2025; 14(11):2207. https://doi.org/10.3390/electronics14112207
Chicago/Turabian StyleZhou, Jinghua, Shuo Zhou, Shasha Chen, and Yifei Sun. 2025. "Adaptive Transient Damping Control Strategy of VSG System Based on Dissipative Hamiltonian Neural Network" Electronics 14, no. 11: 2207. https://doi.org/10.3390/electronics14112207
APA StyleZhou, J., Zhou, S., Chen, S., & Sun, Y. (2025). Adaptive Transient Damping Control Strategy of VSG System Based on Dissipative Hamiltonian Neural Network. Electronics, 14(11), 2207. https://doi.org/10.3390/electronics14112207