1. Introduction
Recently, with the rapid development of the Internet of Things and industrial technology, high-precision indoor positioning technology has become increasingly important in fields such as smart home, industrial automation, intelligent storage, and indoor navigation [
1,
2,
3]. However, traditional wireless positioning technologies, such as Wi-Fi, Bluetooth, and ultra-wideband (UWB), are vulnerable to electromagnetic signal interference generated by other radio frequency wireless devices and also require additional infrastructure [
1,
4]. In contrast, visible light communication (VLC) technology has become a research hotspot that attracts much attention in the field of indoor positioning in recent years due to its advantages such as wide bandwidth, strong anti-interference ability, low cost, and high security [
5,
6,
7]. However, to achieve high precision visible light positioning, the system must obtain accurate information about light-emitting diodes’ (LEDs) deployment in advance [
8]. At present, such information usually relies on architectural drawings or manual measurements, but the former is often inaccurate and lacks electronic identifiers, and the latter faces problems such as a high labor cost and low efficiency and can be error-prone in large-scale deployment, which seriously restricts the practical application of visible light positioning (VLP) systems [
9].
The localization of LEDs is essentially a passive localization problem, and the localization process is performed by taking different types of measurements of the signal sources from stations with known locations and then solving the source locations using localization algorithms [
5]. The measurement information includes the received signal strength (RSS), time of arrival (TOA), time difference of arrival (TDOA), and angle of arrival (AOA) [
10,
11,
12,
13]. However, the positioning accuracy of a single measurement method is limited, so the hybrid TDOA-AOA positioning method has been widely researched in recent years [
14,
15,
16,
17,
18]. Reference [
14] proposed a hybrid TDOA-AOA source localization approach that achieves higher accuracy than using either TDOA or AOA alone. In ref. [
15], a constrained optimization method with geometric constraints was applied to the hybrid model, offering better robustness than traditional linear least squares. Reference [
16] presented a closed-form localization solution combining TDOA and AOA measurements, particularly effective in low-probability-of-intercept environments. Reference [
17] introduced a structured total least squares method to reduce the estimation bias in hybrid localization problems. Reference [
18] proposed a hybrid positioning method based on multi-station TDOA and single-station AOA. This approach enhanced the positioning accuracy by incorporating AOA measurement information into TDOA equations and utilizing the weighted least square method to solve for the closed solution. Consequently, enhanced stability and accuracy can be achieved, surpassing the capabilities of single-station AOA. Nevertheless, this method may not achieve optimal results in environments characterized by significant multipath and occlusion effects.
Furthermore, whether it is TDOA or AOA, the direct relationship between the measured value and the source position is nonlinear and non-convex [
19,
20]. Directly solving it using nonlinear methods will lead to an increase in computational complexity. Among the existing methods, the most classic algorithms are solved through some non-iterative techniques [
21,
22]. For example, the two-stage weighted least squares (TWLS) method [
21] estimates the target position and auxiliary variables by rearranging the nonlinear TDOA equations into a set of linear equations while ignoring the relationship between the target position and the auxiliary variables and then refines the estimates. Although non-iterative methods have high computational efficiency, they are sensitive to measurement noise. Although the iterative optimization method can improve the accuracy, there exists the problem of convergence [
18,
23]. For example, the iterative constrained weighted least squares (lCWLS) method [
23] takes the relationship between the target position and the auxiliary variables as the constraint and iteratively updates the weight matrix. However, this method faces the divergence problem.
More critically, most of the existing algorithms are based on the hypothesis of line-of-sight (LOS) propagation, but in the actual indoor environment, the signal is often reflected and refracted by obstacles to form non-line-of-sight (NLOS) propagation, resulting in increased measurement errors and seriously affecting the positioning performance.
In recent years, the rise of intelligent reflective surface (IRS) technology has provided a new way to solve the signal enhancement problem in an NLOS environment [
24,
25]. An IRS can actively regulate the electromagnetic wave propagation environment and optimize the signal quality of the reflection path [
26]. Several studies have demonstrated the potential of an IRS in enhancing the VLP accuracy and reliability. Reference [
27] analyzed the impact of meta surfaces and mirror arrays in IRS-assisted VLC and showed a significant improvement in signal coverage. Reference [
28] proposed a passive indoor localization system using an IRS and verified its effectiveness in practical environments. Reference [
29] proposed an RSS-based n-step method for VLP in combination with an IRS, according to high localization accuracy in the NLOS case. Previous studies have demonstrated the effectiveness of an IRS in enhancing VLP systems, achieving improved accuracy and robustness. However, most of these studies are based on RSS algorithms, and there are fewer studies on TDOA and AOA algorithms.
While RSS-based positioning methods are indeed simpler to implement, they typically suffer from lower accuracy and higher susceptibility to multipath fading and noise, particularly in complex indoor environments. In contrast, TDOA provides geometric information that is less sensitive to power fluctuations, and AOA offers direct directional cues. By combining TDOA and AOA, the proposed method harnesses both range-difference and angular diversity, which significantly enhances the positioning robustness and precision. Despite its potential, the existing research has yet to fully explore how an IRS can be systematically integrated into a hybrid TDOA-AOA VLC localization framework.
In summary, the problem of low-cost and high-precision source localization in complex indoor scenarios remains a difficult issue that needs to be studied and implemented. Based on the above situation, this paper studies the feasibility of deploying an IRS in the indoor VLP system and proposes a high-precision indoor positioning method based on TDOA and AOA suitable for this scenario. The proposed system integrates TDOA and AOA measurements using a PD-based receiver array. The IRS module adopts a passive specular reflection design. Compared to UWB systems, our solution offers a lower deployment cost, and compared to RSS-based VLC approaches, it achieves significantly higher accuracy and robustness. This cost–performance balance makes it well-suited for industrial automation, smart lighting, and medical navigation applications that require sub-meter indoor localization. Specifically, the contributions of the paper are summarized as follows:
A virtual path modeling method based on an IRS was proposed. By establishing virtual light source and virtual receiver models, the NLOS path was transformed into a virtual LOS path. Combined with the measurement information of TDOA and AOA, the geometric symmetry of the IRS was utilized to improve the solution ability of the positioning equation.
We designed an optimization algorithm based on semi-positive definite relaxation (SDR), which transforms the non-convex positioning problem into a semi-definite programming (SDP) problem. By introducing the initial weighted least squares (WLS) estimation and the IRS reflection path length constraint, as well as relaxing the rank constraint, the convexity and global convergence of the optimization problem are guaranteed.
A dynamic weighted fusion strategy was proposed, which utilizes the distance residual to dynamically adjust the weights of the positioning results of the virtual light source and the real light source, in order to effectively suppress the influence of measurement noise.
The remainder of this paper is organized as follows.
Section 2 presents the system model, including the channel gain and the localization scenario.
Section 3 details the proposed hybrid TDOA-AOA localization method, including the mathematical formulation, optimization algorithm, and implementation strategy.
Section 4 provides the simulation results and performance evaluations under various conditions. Finally,
Section 5 concludes the paper and discusses future work.
In this paper, bold uppercase and lowercase letters are used to denote the matrix and column, respectively. The term denotes the i-th row and j-th column element of the matrix . The term is the Euclidean norm, is the diagonal matrix of the elements of , and is written as . is a diagonal matrix consisting of . represents the determinant and trace of , respectively. and represent identity and zero matrices, respectively, and their subscripts denote the matrix size. Vectors and are defined as having a length of N and are expressed in unity and zero, respectively.
4. Simulation and Analysis
In this section, the performance of the localization algorithms is evaluated using Monte Carlo simulations under hybrid LOS and NLOS channel conditions. To evaluate the performance of the proposed localization algorithm, we compared it with four representative baseline methods: ICWLS [
23], TWLS [
21], WCCT (weighted centroid with Chan–Taylor) [
13], and TAWLS (TDOA and AOA based weighted least squares) [
18]. These methods were selected due to their representativeness in localization. ICWLS introduces constraints between the target and auxiliary variables and performs iterative updates to improve the positioning accuracy. TWLS adopts a two-step strategy that first linearizes TDOA equations to obtain an initial estimate and then refines it using weighted least squares. WCCT is a simple and practical heuristic method that estimates the target position via weighted centroid computation, typically effective under LOS-dominant conditions. TAWLS is a recent hybrid algorithm that fuses TDOA and AOA measurements and solves the localization problem using a weighted least squares approach. We also continued to compare the TCS algorithm, which has the same flow as the TCAS algorithm but does not use AOA measurement information.
The simulation results are represented by the estimated bias, which is defined by the following equation:
where
is the true position of the source, and
is the estimated value obtained from the
simulation.
is the number of Monte Carlo experiments. The related parameters are shown in
Table 1.
We set the upper and lower edge lengths of the receiver quadrangle structure to be 6 dm and 8 dm, respectively. When the coordinates of
are determined during the simulation, the other PDs coordinates can be derived from the relative geometrical positions with respect to
. The relative relationship is shown in
Table 2.
4.1. The Effect of Noise on Algorithm Performance
In this section, we describe the effect of noise on the performance of the algorithm. We set the real coordinates of the light source
, set the coordinates of
to be (2, 2, 0), and the coordinates of the other PDs can be obtained from
Table 2. For each noise condition, we performed
L experiments and then calculated
according to Equation (
48). The performance of the proposed location algorithm was analyzed in terms of TDOA measurement noise and AOA measurement noise. The TDOA and AOA measurement noise are independent. The variance of the measurement noise in the covariance matrix
and
satisfies
and
. At a given SNR, the TDOA noise power
is obtained as follows with the speed of light
m/s [
22].
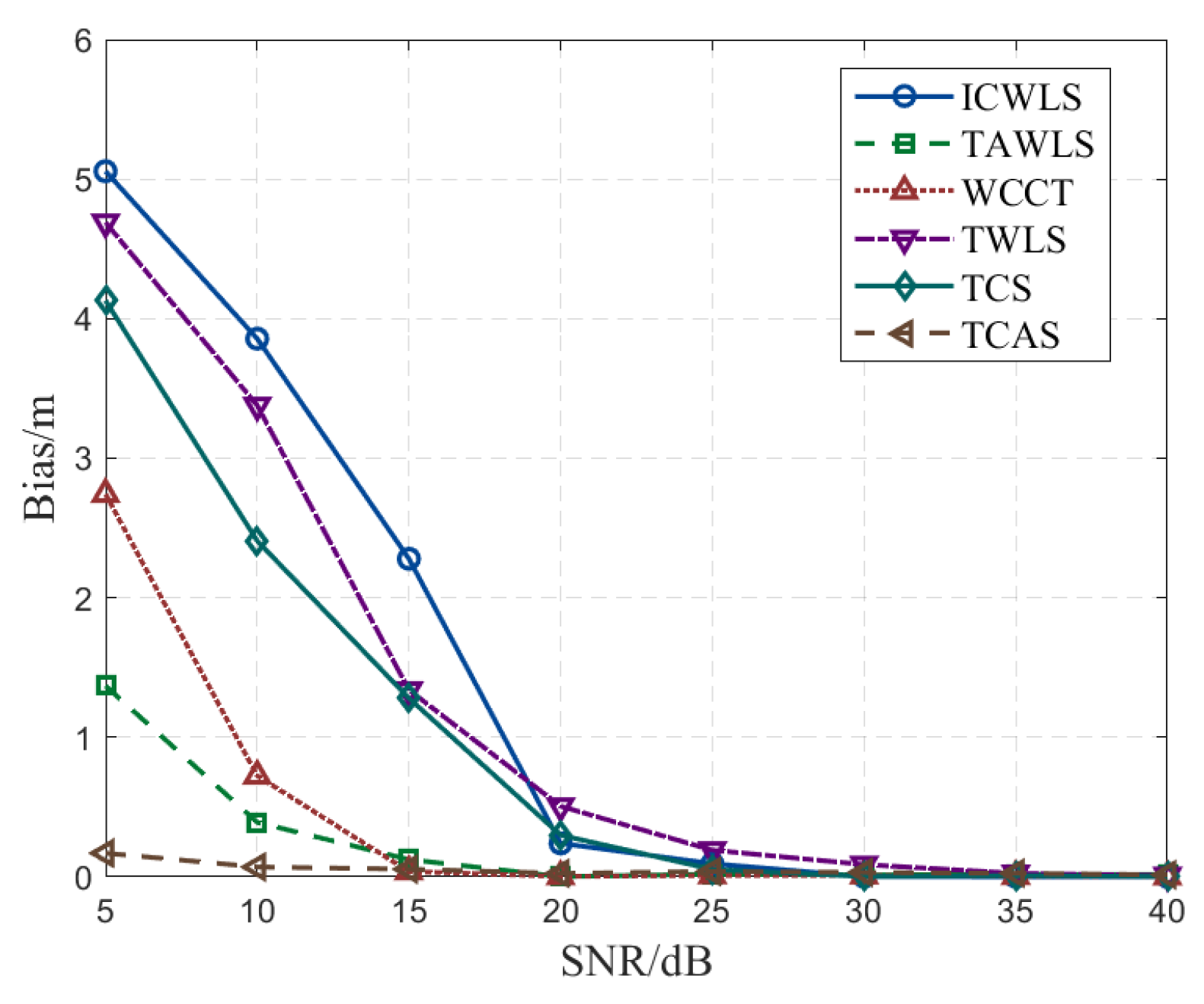
Figure 5 shows the positioning errors of each algorithm in the SNR range of 5–40 dB when
. Under the condition of high SNR, all algorithms can achieve ideal positioning results. The convergence of the TWLS and ICWLS algorithms is weaker than that of the other algorithms. In the case of low SNR, the TAWLS algorithm and the TCAS algorithm of mixed AOA measurement information are obviously better than other algorithms.
Figure 6 illustrates the impact of AOA noise on the performance of the TAWLS and TCAS algorithms under different TDOA noise conditions. It can be seen from the figure that under different TDOA noise conditions, the deviation of the TCAS algorithm is significantly lower than that of the TAWLS algorithm. As AOA noise increases, the TCAS algorithm’s deviation remains below 0.2 m. For AOA noise, the TAWLS algorithm is more sensitive to the change in the TDOA noise, which has a greater impact on the estimation results. Therefore, the TCAS algorithm has better robustness in dealing with AOA noise when the TDOA noise is larger.
4.2. The Effect of the Number of Sensors on Algorithm Performance
In practical application scenarios, the sensor array constitutes the primary component for signal reception. Achieving optimal and consistent signal reception can often prove challenging. This is due to the signal being subject to interference by a number of factors in the propagation environment. These factors include the complex indoor environment, which can result in signal occlusion and reflection, and the receiver’s FOV. Simultaneously, to enhance the precision and dependability of the TAWLS and TCAS algorithms, a specific number of superfluous equations were incorporated. In an ideal environment, these redundant equations can have a positive impact; however, in the actual operating environment, the effect may be altered due to the poor signal received by the sensor and other factors, thus affecting the performance of the entire algorithm. In order to make the research more suitable for the conditions of practical application, the TCAS and TAWLS algorithms were tested with a different number of sensors.
The was set to 1°, the SNR range of TDOA was set to 5–40 dB, and the number of sensors N was changed to conduct comparative experiments. The simulation parameters in this subsection remain the same as in the previous subsection. When selecting the PDs, was fixed to be selected, because is fixed to the top surface and generally receives the signal. We randomly selected PDs from the other four PDs for the experiment.
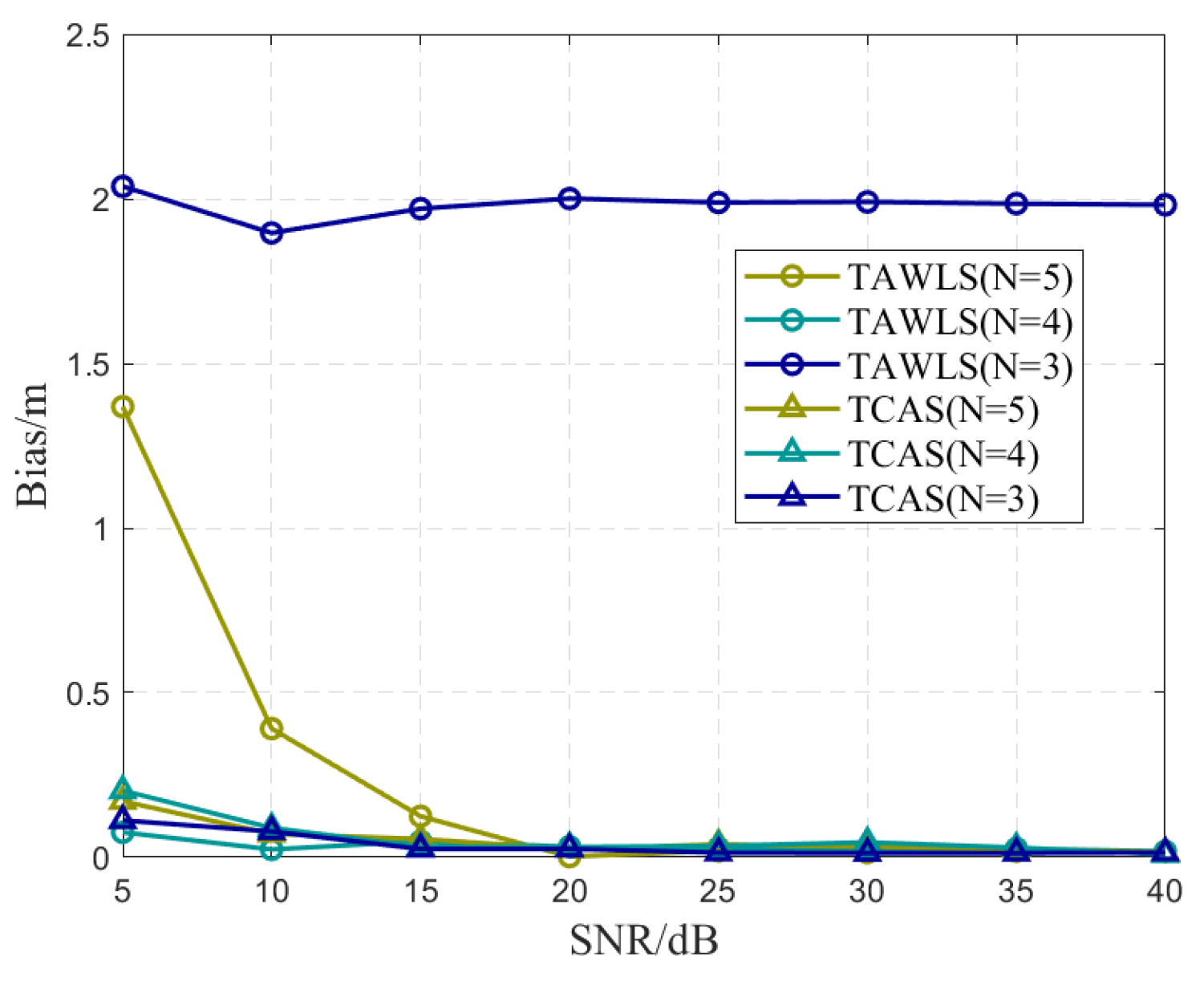
Figure 7 shows the effect of varying the number of PDs
on the localization performance under different TDOA SNR conditions, comparing the proposed TCAS algorithm with the baseline TAWLS method. It can be observed that for TAWLS, the positioning error increases significantly as
N decreases, especially under low SNR conditions. For example, when SNR = 5 dB, the bias of TAWLS rises from 1.4 m (
) to over 2.0 m (
), indicating strong dependence on TDOA measurement redundancy. In contrast, TCAS maintains a much more stable error across all values of
N, and its performance remains nearly unchanged even when the number of sensors is reduced to three.
Interestingly, in low SNR environments, the localization error of TCAS slightly decreases as N decreases. This result is attributed to the increased relative influence of the AOA measurements when fewer PDs are used, as the number of TDOA constraints diminishes. Since the angular observation geometry remains consistent, TCAS shifts reliance toward the more stable AOA constraints, which helps suppress the impact of TDOA noise under sparse configurations.
4.3. Analysis of Overall Algorithm Performance
In order to verify the effectiveness of the proposed algorithm, we used the algorithms to localize the sources at different locations. We numerically simulated
test points uniformly distributed in the 10 m × 10 m × 5 m region, where the coordinates of
x and
y ranged from 1 to 10, and coordinate z was fixed at 5. In the experiment, we localized the LEDs located at each of these 100 test points, we set the coordinates of
to be (0, 2, 0), and the coordinates of the other PDs were obtained from
Table 2. Also, we assume here that the signal of each test point can be received by all PDs. The bias was used in the experimental results to indicate the performance of the algorithms. We set SNR = 20 dB and
, and the positioning coordinates of different positioning algorithms were compared with the actual coordinates, as shown in
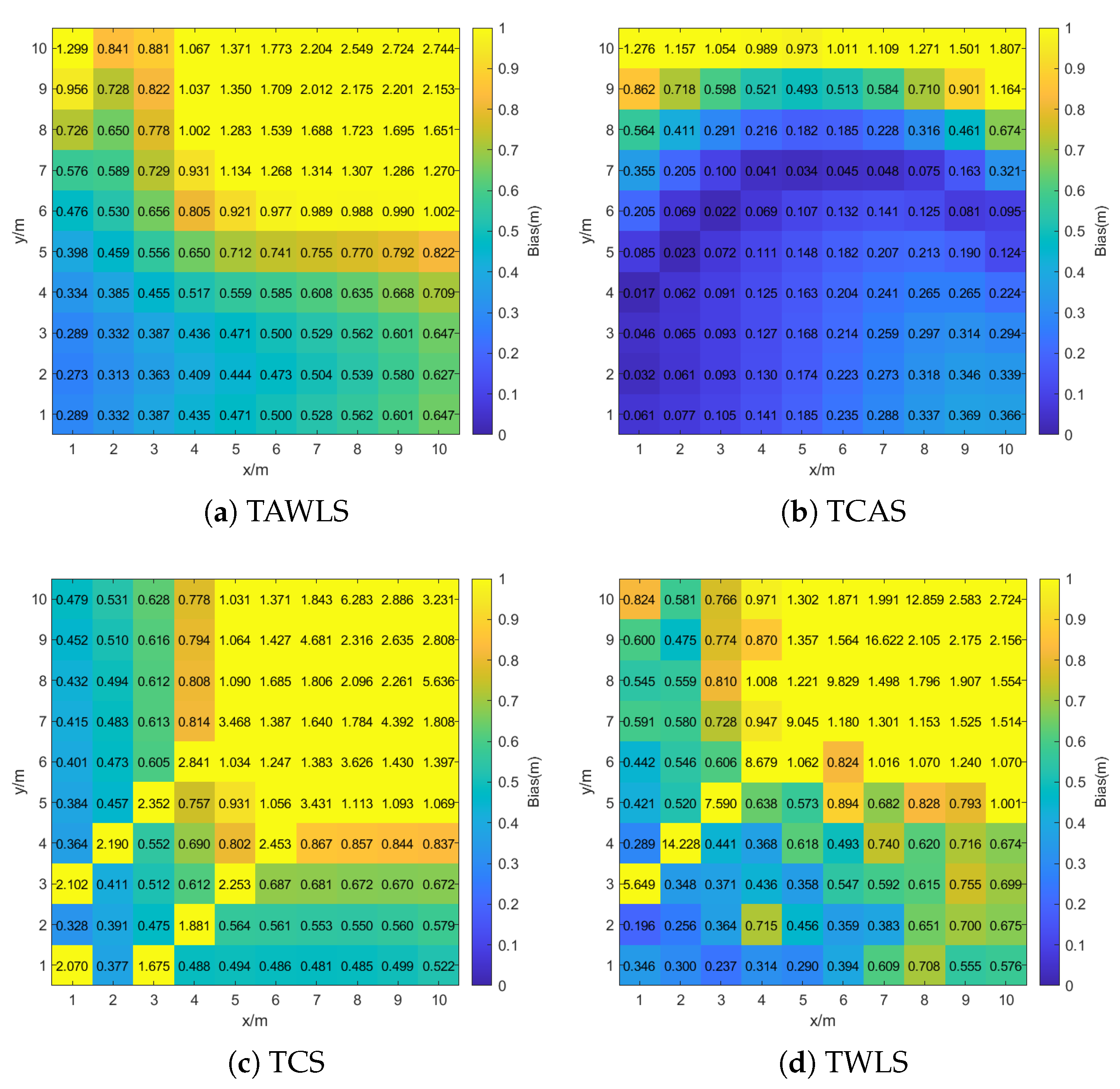
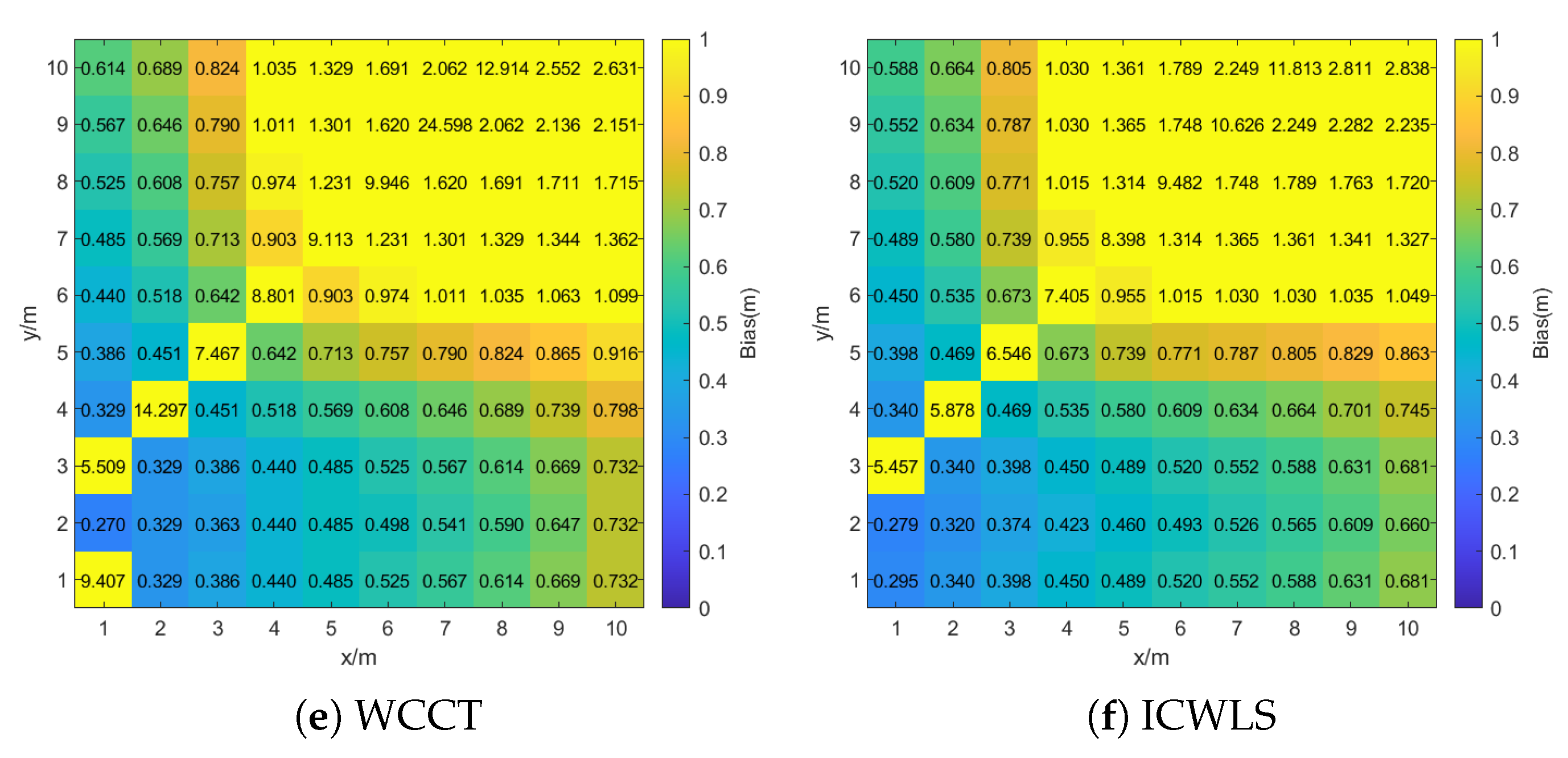
Figure 8.
Figure 8 shows the spatial distribution of the localization bias across the indoor region. It can be observed that most baseline algorithms, such as TAWLS, TCS, TWLS, WCCT, and ICWLS, exhibit larger positioning errors near the upper-right corner of the room (e.g., when
), with some errors exceeding 2.5 m. This is primarily due to the degradation of TDOA geometric diversity and increased noise in regions farther from the PD array.
Interestingly, it is also observed that in certain points close to the PD array, TDOA-only methods (TCS, TWLS, WCCT and ICWLS) still show unexpectedly large errors. This is attributed to geometric degeneration, where the distances from multiple PDs to the LED source become nearly equal. In such cases, the time difference of arrival becomes approximately the same, leading to poor sensitivity and poor localization results.
In contrast, the proposed TCAS algorithm maintains consistently low errors across the room. Most locations have errors below 0.2 m. This highlights the robustness and adaptability of TCAS, which combines both TDOA and AOA information and is optimized using semidefinite relaxation to mitigate noise and geometric limitations.
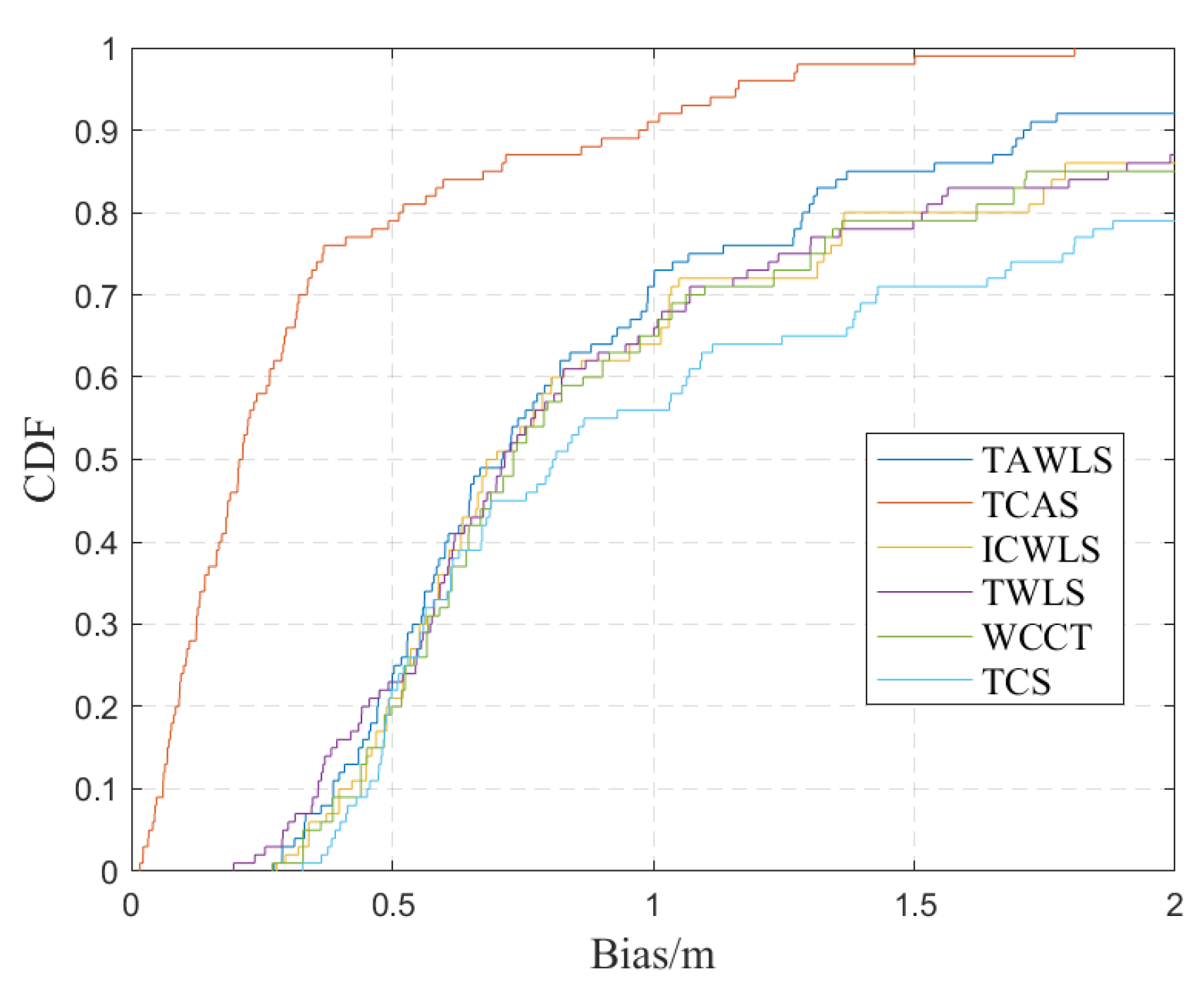
The superior performance of the TCAS algorithm is further illustrated in
Figure 9, which uses a biased cumulative distribution function (CDF) to evaluate the performance of the TCAS algorithm and other algorithms.
Figure 9 shows the CDF of the various algorithm deviations. In general, 70% of the localization errors obtained by the TCAS algorithm are below 0.25 m, which indicates that most of the positioning errors are closely clustered near the low value. In contrast, traditional algorithms such as ICWLS and TWLS show significantly poor performance, reflecting their sensitivity to measurement noise. Furthermore, compared to the TAWLS algorithm, the TCAS algorithm has a more pronounced upward trend, especially in the low deviation range that is critical for high-precision applications.
To provide a more comprehensive comparison among the studied localization algorithms, we further analyzed their computational complexity.
Figure 10 presents the average computation time of each algorithm under identical simulation settings. As shown, WCCT and TWLS achieve the lowest runtime, with average delays below 6 ms, making them suitable for fast response scenarios. ICWLS and TAWLS require moderate computation time, while the proposed TCAS algorithm incurs the highest cost, averaging approximately 17 ms. The overall computation time remains within a reasonable range for near-real-time indoor localization. This increase is mainly due to the SDR formulation and the joint utilization of TDOA and AOA information, which adds computational complexity but significantly enhances the robustness and accuracy.
To further interpret the performance gains shown in
Figure 8 and
Figure 9, we analyzed the fundamental mechanisms that contribute to the superiority of the proposed TCAS algorithm compared with the baseline methods.
First, TCAS jointly utilizes TDOA and AOA measurements, which provide complementary spatial information. TDOA is sensitive to timing accuracy and geometry, whereas AOA is more robust to certain noise types and less dependent on distance. By integrating these two sources, TCAS significantly improves the estimation stability, especially in challenging scenarios such as geometrically degenerate regions or low SNR conditions.
Second, the localization problem in TCAS is formulated as a convex SDP task through SDR. Unlike traditional least-squares approaches that may fall into local minima or suffer from poor conditioning, this convex formulation ensures global optimization, greater numerical stability, and reduced sensitivity to initial values and measurement variance.
Third, TCAS also incorporates symmetry-aware modeling of AOA paths. This additional geometric exploitation allows the algorithm to better utilize angular constraints, further enhancing the robustness.
These algorithmic innovations explain the consistent improvement observed in both mean error and maximum error metrics across the spatial domain. In summary, the combination of multi-modal fusion, convex optimization, and structured geometric modeling forms the foundation of TCAS’s superior performance over conventional localization methods.
Although this study primarily focuses on simulation-based validation, we acknowledge the importance of physical experimentation in evaluating real-world performance. At present, the practical implementation of IRS in visible light systems is still at an early stage, especially regarding controllable reflection direction and optical specular stability. In addition, accurate synchronization and angle sensing required for joint TDOA and AOA measurements involve hardware modules that are still under development. Future work will focus on system prototyping, calibration, and performance testing under dynamic conditions to facilitate practical deployment.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}