
Optimized Universal Droop Control Framework for Enhancing Stability and Resilience in Renewable-Dense Power Grids

 ,
,  , ,
, ,
Abstract
1. Introduction
- Achieving better voltage/frequency control under varied line conditions;
- Integrating frameworks for load and resource allocation across multiple DERs;
- Integrating a grid-forming inverter with phasor measuring capabilities for real-time network monitoring and fault detection to ensure network stability;
- Maintaining autonomous operation (resilient) during high-impact disruptions (loss of distribution line, loads, and DERs);
- Supporting stable performance in both grid-tied and islanded microgrids.
2. Materials and Methods
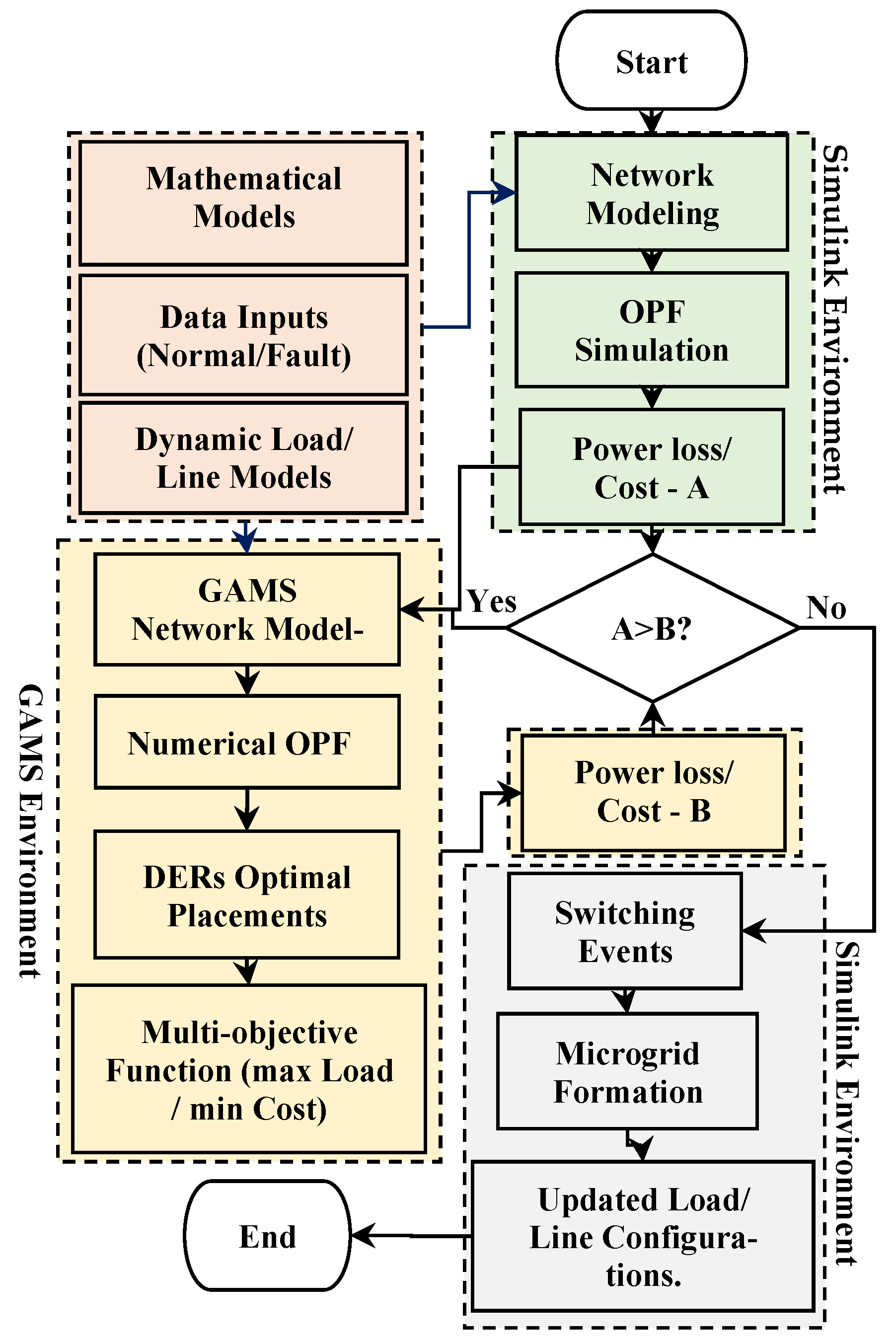
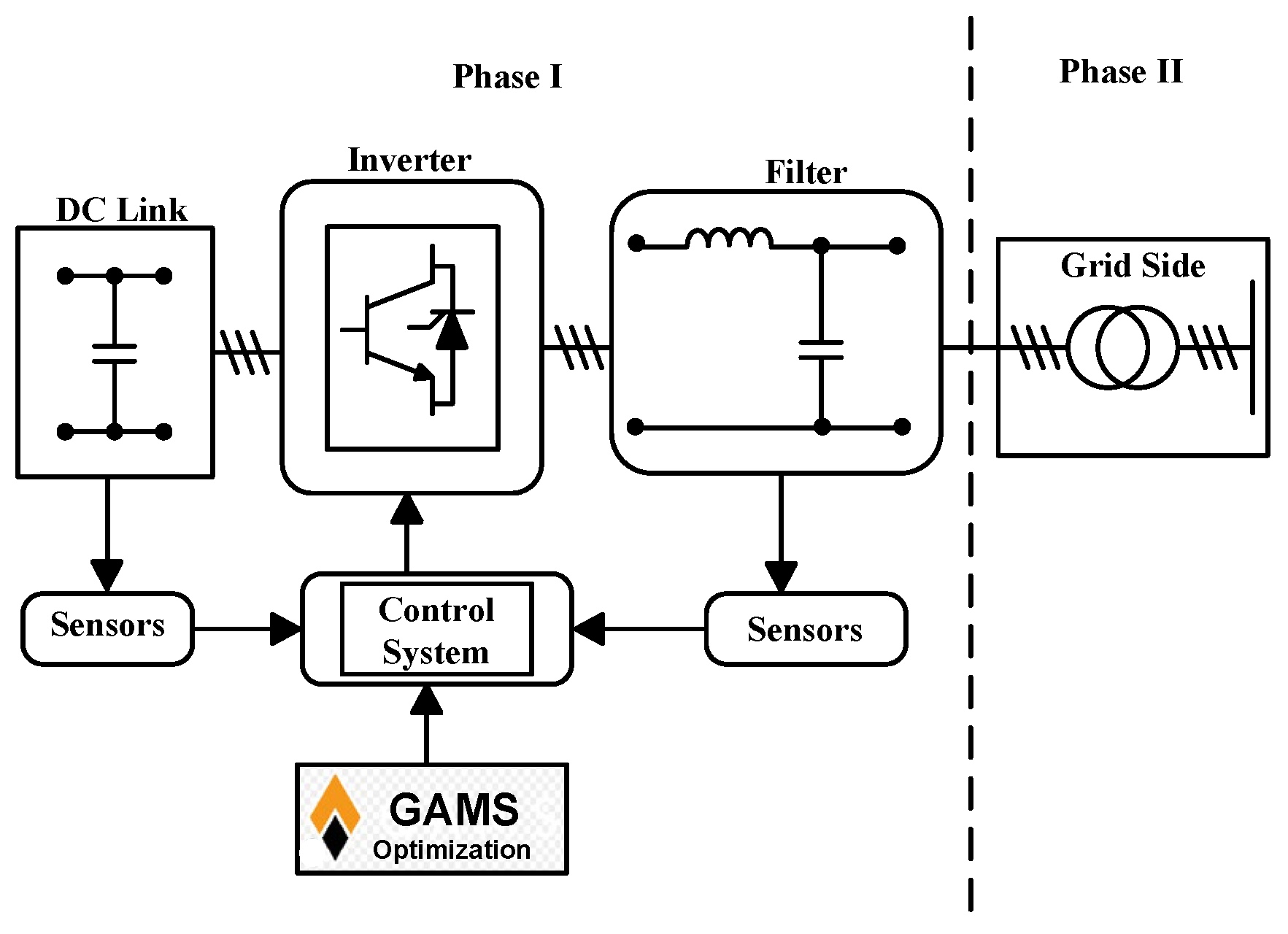
Proposed Integrated Framework
3. Mathematical Modeling
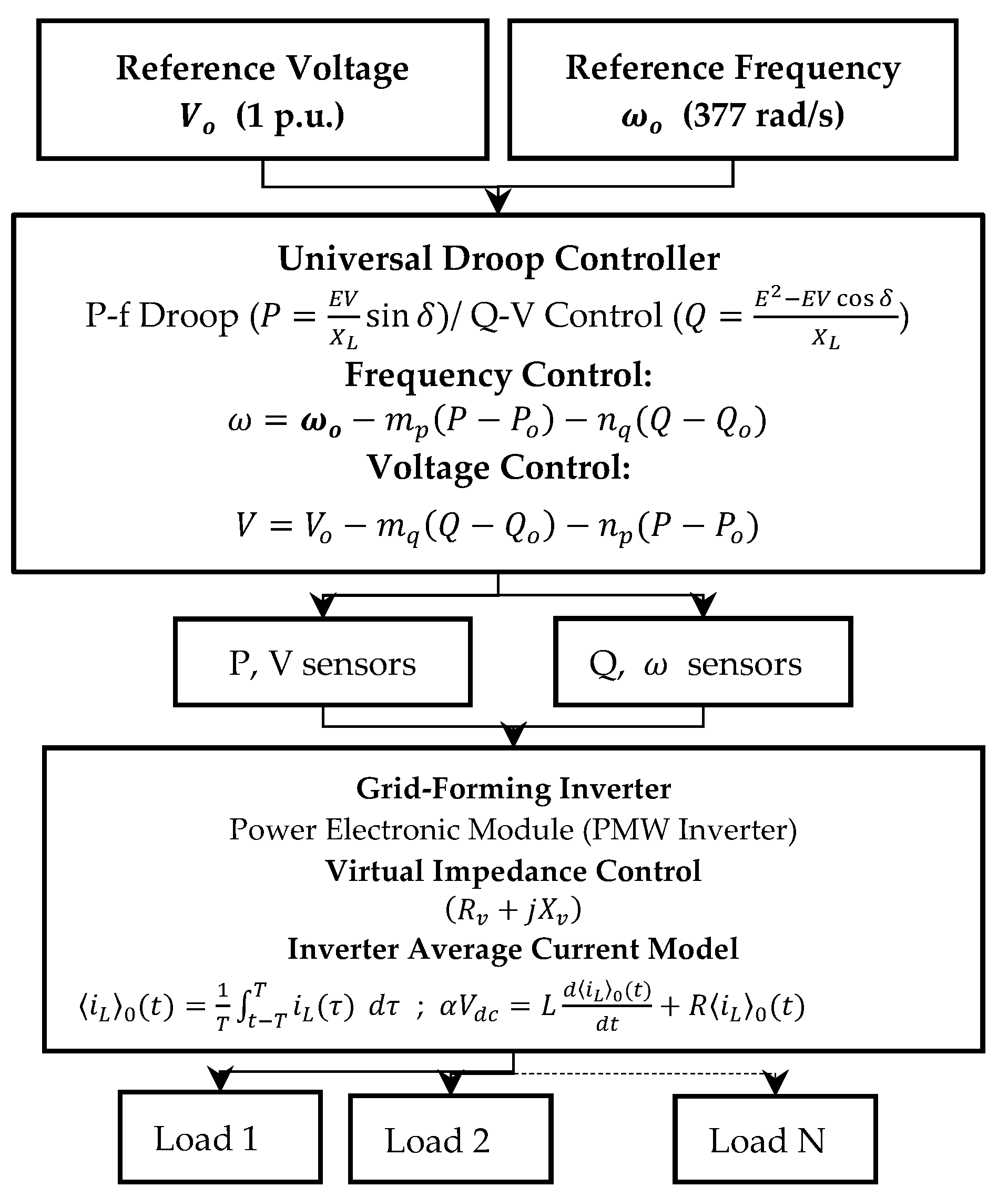
3.1. Grid-Forming Universal Droop Controller (GFM-UDC)
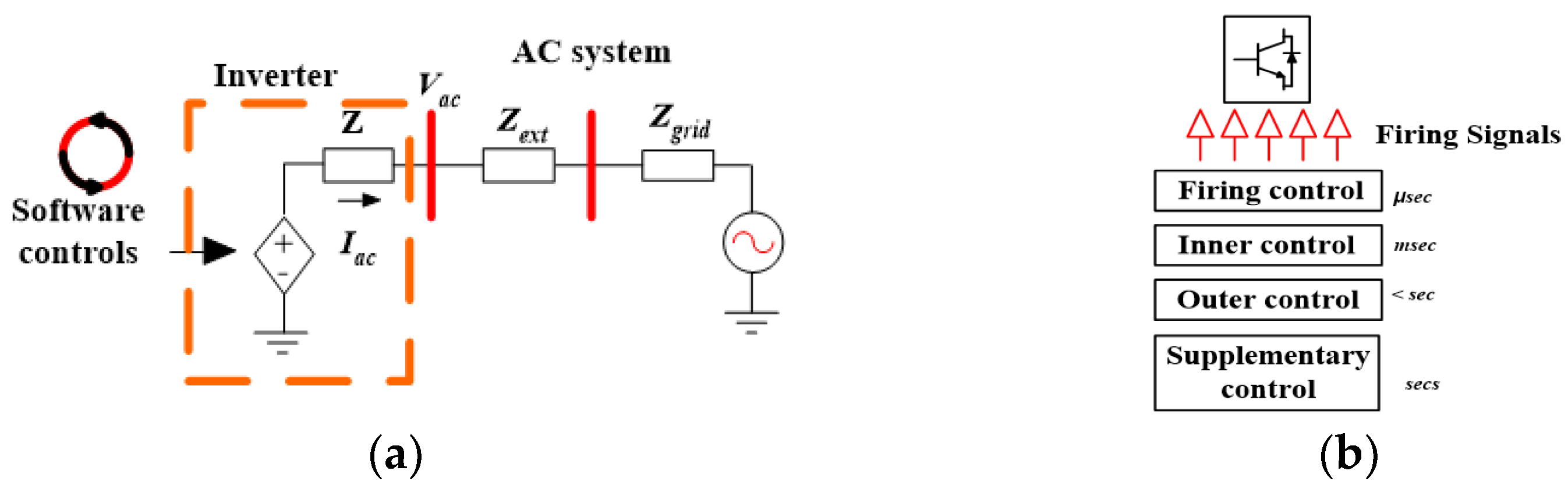
3.1.1. Dynamic Modeling of Droop Control with Inverter
3.1.2. Phase Angle and Voltage Waveform Generation (Grid-Forming)
3.1.3. Virtual Impedance Incorporation
3.1.4. Modeling an Expanded State–Space Model
3.2. GAMS Optimization Modeling
GAMS Numerical Optimization Implementation
- Network total number of buses, Gen_buses, DER_buses, Batt_buses, Switch_lines, Demand response capable buses;
- Active power load (P_load) and reactive power load (Q_load);
- Voltage magnitude constraint (0.95–1.05 p.u.);
- Base bus voltage (p.u.);
- Power flow equations definition based on the distribution flow model;
- Network branch resistance and reactance, maximum generator’s active and reactive powers, maximum DER active and reactive powers;
- SoC—battery maximum storage capacity (MWh), battery maximum charging power (MW), battery maximum discharging power (MW);
- Line failure probability, and demand response savings per MW curtailment (USD/MW).
3.3. Fault Localization Using Harris Hawks Optimization (HHO)
IQE as a Feature Descriptor
4. Case Study
4.1. Simulation Results and Discussions
Measurement Metrics Used
4.2. Discussion
4.2.1. Improved System Stability
4.2.2. Fault Localization with HHO
4.2.3. Applicability for Real-Time Solution and Challenges
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CWRU | Case Western Reserve University Bearing Data Center |
| CNNs | Convolutional Neural Networks |
| DERs | Distributed Energy Resources |
| GAMS | General Algebraic Modeling System |
| GFL | Grid-Following Inverter |
| GFM | Grid-Forming Inverter |
| IBR | Inverter-Based Resources |
| HILF | High-Impact Low-Frequency |
| HIL | Hardware-In-Loop |
| HHO | Harris Hawk’s Optimization |
| MFPT | Machinery Failure Prevention Technology |
| UDC | Universal Droop Controller |
| GDXXRW | GAMS GDX Read–Write Command |
| OPF | Optimal Power Flow |
| PQ | Active and Reactive Power |
| D-PQ | Delta-Connected PQ load |
| Y-PQ | Y-Connected PQ load |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
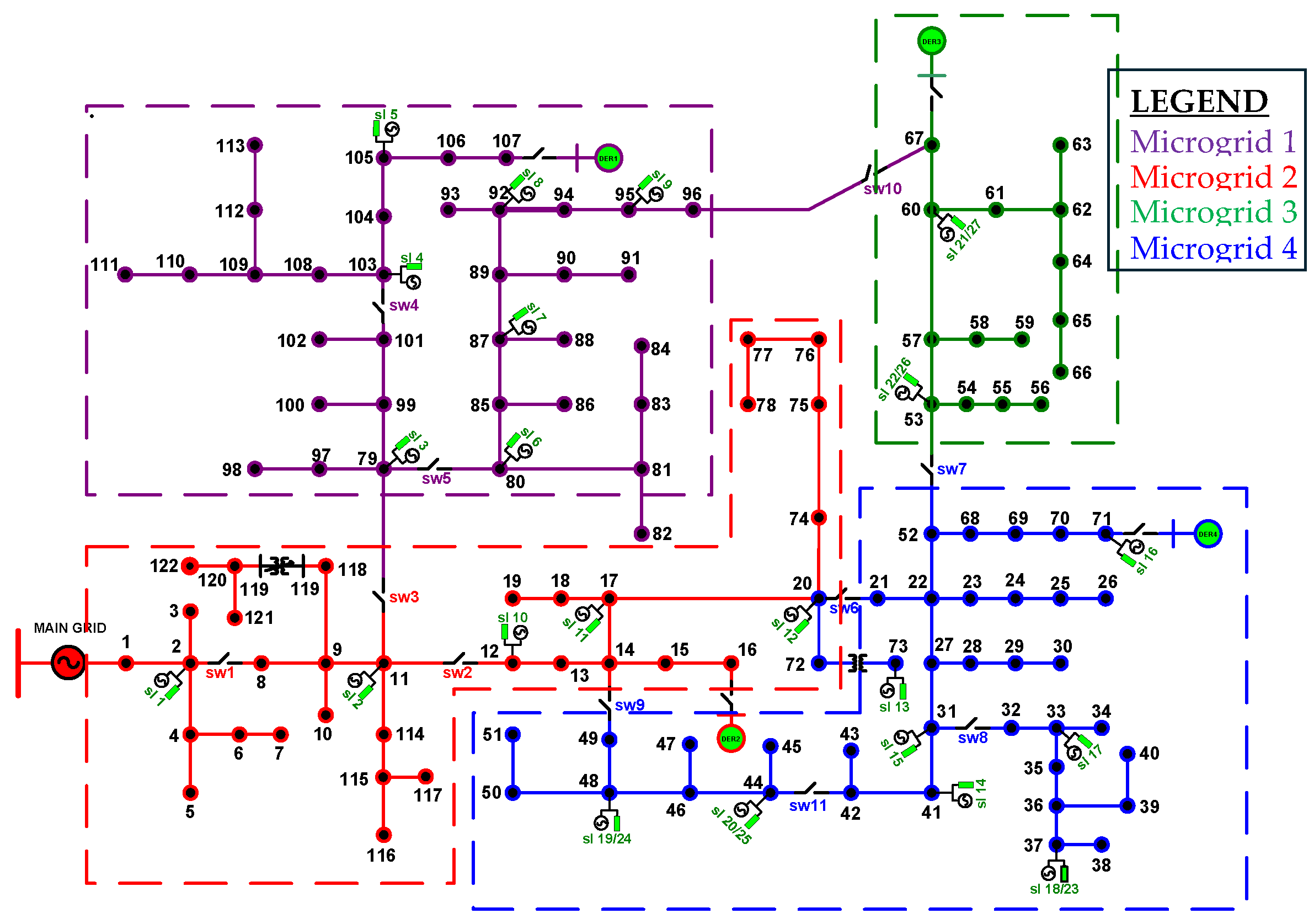
| Microgrid No. | Bus No. (GAMS-IEEE 123) | No. DER Resources | UDC Buses |
|---|---|---|---|
| 1-Purple | 79–18, 80–135, 87–42, 92–47, 95–50, 103–25, 105–29 | 7 | 107–251 |
| 2-Red | 2–1, 11–13, 12–152, 17–57, 20–60, | 5 | 16–56 |
| 3-Green | 53–197, 60–105, | 2 | 67–350 |
| 4-Blue | 48–93, 44–91, 41–87, 31–76, 37–82, 33–78, 73–610, 71–450, | 8 | 71–451 |
| Total: 4-Microgrids | 22-Buses | 22-DER Resources each 130 kW | 4-Inverters |
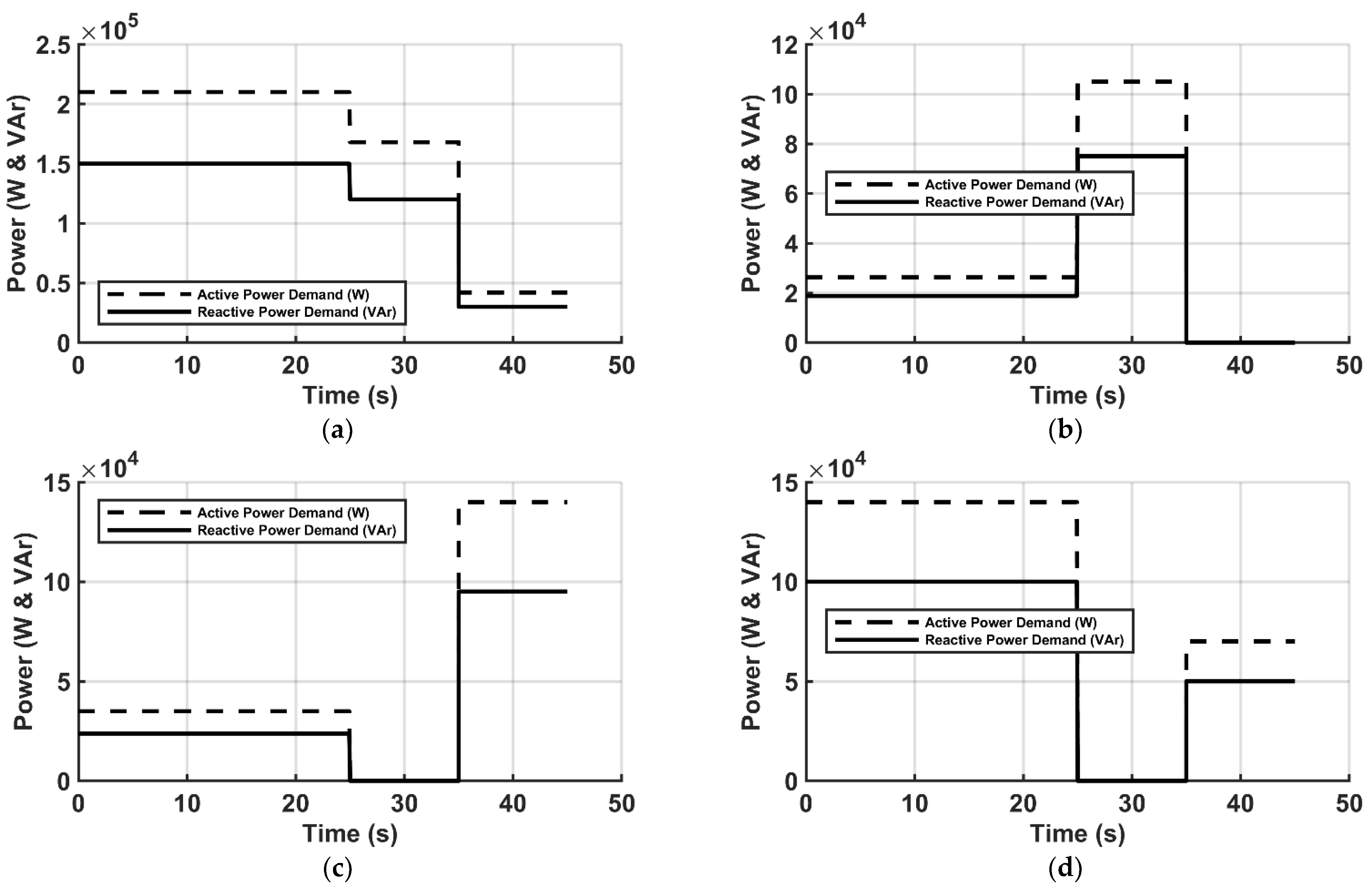
| S/N | GAMS-IEEE Nodes | PQ Dynamic Load | Load Curtailment (%) |
|---|---|---|---|
| 1 | 92–47 | 210 kW & 150 kVAr | 100, 80, 20 |
| 2 | 93–48 | 105 kW & 75 kVAr | 20, 100, 0 |
| 3 | 94–49 | 140 kW & 95 kVAr | 20, 0, 100 |
| 4 | 77–65 | 140 kW & 100 kVAr | 100, 0, 50 |
| System Power Input | Phase A | Phase B | Phase C | Total | |
|---|---|---|---|---|---|
| IEEE 123-Bus Network Benchmark | Active Power (kW) | 1463.861 | 963.484 | 1193.153 | 3620.498 |
| Reactive Power (kVAr) | 582.101 | 343.687 | 398.976 | 1324.765 | |
| Proposed GFM-UDC Model | Active Power (kW) | 1427.778 | 917.405 | 1158.464 | 3503.647 |
| Reactive Power (kVAr) | 381.2 | 362.4 | 406.1 | 1148.7 |
| System Power Input | Phase A | Phase B | Phase C | Total | |
| IEEE 123-Bus Network Benchmark | Active Power (kW) | 1463.861 | 963.484 | 1193.153 | 3620.498 |
| Reactive Power (kVAr) | 582.101 | 343.687 | 398.976 | 1324.765 | |
| Proposed GFM-UDC Model | Active Power (kW) | 1014 | 913.3 | 963.2 | 2890.5 |
| Reactive Power (kVAr) | 311.9 | 287.5 | 333.1 | 932.5 |

References
- An, R.; Liu, Z.; Liu, J.; Liu, B.A. Comprehensive Solution to Decentralized Coordinative Control of Distributed Generations in Islanded Microgrid Based on Dual-Frequency-Droop. IEEE Trans. Power Electron. 2022, 37, 3583–3597. [Google Scholar] [CrossRef]
- Zhang, Z.; Dou, C.; Yue, D.; Zhang, B. Predictive Voltage Hierarchical Controller Design for Islanded Microgrids Under Limited Communication. IEEE Trans. Circuits Syst. 2022, 69, 933–942. [Google Scholar] [CrossRef]
- Xie, X.; Quan, X.; Wu, Z.; Cao, X.; Dou, X.; Hu, Q. Adaptive Master-Slave Control Strategy for Medium Voltage DC Distribution Systems Based on a Novel Nonlinear Droop Controller. IEEE Trans. Smart Grid. 2021, 12, 4765–4772. [Google Scholar] [CrossRef]
- Lin, F.-J.; Tan, K.-H.; Chang, C.-F.; Li, M.-Y.; Tseng, T.-Y. An Improved Droop-Controlled Microgrid Using Intelligent Variable Droop Coefficient Estimation. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 4128–4140. [Google Scholar] [CrossRef]
- Munir, M.S.; Li, Y.W.; Tian, H. Residential distribution system harmonic compensation using priority driven droop controller. IEEE Trans. Power Electron. 2020, 35, 213–223. [Google Scholar] [CrossRef]
- Tu, H.; Yu, H.; Lukic, S. Dynamic Nonlinear Droop Control (DNDC): A Novel Primary Control Method for DC Microgrids. IEEE Trans. Power Electron. 2024, 39, 10934–10944. [Google Scholar] [CrossRef]
- Almeida, A.O.; Almeida, P.M.; Barbosa, P.G. Design Methodology for the DC Link Current Controller of a Series-Connected Offshore Wind Farm with a Droop Control Strategy. IEEE Trans. Ind. Appl. 2024, 60, 3568–3577. [Google Scholar] [CrossRef]
- Gu, M.; Meegahapola, L.; Wong, K.L. Coordinated Voltage and Frequency Control in Hybrid AC/MT-HVDC Power Grids for Stability Improvement. IEEE Trans. Power Syst. 2021, 36, 635–644. [Google Scholar] [CrossRef]
- Prakash, S.; Nougain, V.; Mishra, S. Adaptive Droop-Based Control for Active Power Sharing in Autonomous Microgrid for Improved Transient Performance. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 3010–3020. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Nguyen, P.L.; Ma, Z.; Sheng, W. Self-synchronized synchronverters: Inverters without a dedicated synchronization unit. IEEE Trans. Power Electron. 2021, 29, 617–630. [Google Scholar] [CrossRef]
- Minetti, M.; Rosini, A.; Denegri, G.B.; Bonfiglio, A.; Procopio, R. An Advanced Droop Control Strategy for Reactive Power Assessment in Islanded Microgrids. IEEE Trans. Power Syst. 2022, 37, 3014–3023. [Google Scholar] [CrossRef]
- Tavakoli, S.D.; Sánchez-Sánchez, E.; Prieto-Araujo, E.; Gomis-Bellmunt, O. DC Voltage Droop Control Design for MMC-Based Multiterminal HVDC Grids. IEEE Trans. Power Deliv. 2020, 35, 2414–2424. [Google Scholar] [CrossRef]
- Ambia, M.N.; Meng, K.; Xiao, W.; Al-Durra, A.; Dong, Z.Y. Adaptive Droop Control of Multi-Terminal HVDC Network for Frequency Regulation and Power Sharing. IEEE Trans. Power Syst. 2021, 36, 566–577. [Google Scholar] [CrossRef]
- Ghanbari, N.; Bhattacharya, S. Adaptive Droop Control Method for Suppressing Circulating Currents in DC Microgrids. IEEE Open Access J. Power Energy 2020, 7, 100–110. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, J.; Zheng, M.; Ma, L. A distributed reactive power sharing approach in microgrids with improved droop control. CSEE J. Power Energy Syst. 2021, 7, 1238–1245. [Google Scholar]
- Xu, Y.; Liu, C.-C.; Schneider, K.P.; Ton, D.T. Placement of remote-controlled switches to enhance distribution system restoration capability. IEEE Trans. Power Syst. 2016, 31, 1139–1150. [Google Scholar] [CrossRef]
- Saleh, A.; Rastegarnia, A.; Farzamnia, A.; Kin, K.T.T. Power and Current Limiting Strategy Based on Droop Controller with Floating Characteristic for Grid-Connected Distributed Generations. IEEE Access 2022, 10, 13967–13973. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Lei, M.; Qiu, F. Analysis and Control of DC Voltage Dynamics Based on a Practical Reduced-Order Model of Droop-Controlled VSC-MTDC System in DC Voltage Control Timescale. IEEE Trans. Power Deliv. 2024, 39, 1031–1038. [Google Scholar] [CrossRef]
- Dissanayake, A.M.; Ekneligoda, N.C. Multiobjective Optimization of Droop-Controlled Distributed Generators in DC Microgrids. IEEE Trans. Ind. Inform. 2020, 16, 2423–2435. [Google Scholar] [CrossRef]
- Shin, D.-Y.; Kwon, D.-H.; Moon, S.-I.; Yoon, Y.-T. Real-Time Coordinated Control of a Grid-VSC and ESSs in a DC Distribution System for Total Power Loss Reduction Considering Variable Droop Using Voltage Sensitivities. IEEE Access 2023, 11, 8300–8312. [Google Scholar] [CrossRef]
- Majumder, R. Some aspects of stability in microgrids. IEEE Trans. Power Syst. 2013, 28, 3243–3252. [Google Scholar] [CrossRef]
- Zhao, X.; Liu, J.; He, J. Experimental validation of UDC-based inverter control in hardware-in-the-loop microgrid. Electr. Power Syst. Res. 2022, 209, 107950. [Google Scholar]
- Tan, J.; Zhong, H.; Xia, Q. Unified grid-interactive inverter design for resilience-oriented microgrid control. IEEE Access 2022, 10, 35491–35504. [Google Scholar]
- Lasheen, A.; Ammar, M.E.; Zeineldin, H.H.; Shaaban, M.F.; El-Saadany, E. Assessing the Impact of Reactive Power Droop on Inverter Based Microgrid Stability. IEEE Trans. Energy Convers. 2021, 36, 2385–2395. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L.; Li, W. Autonomous DC Line Power Flow Regulation Using Adaptive Droop Control in HVDC Grid. IEEE Trans. Power Deliv. 2021, 36, 3550–3561. [Google Scholar] [CrossRef]
- Du, W.; Tuffner, F.K.; Schneider, K.P.; Lasseter, R.H.; Xie, J.; Chen, Z.; Bhattarai, B. Modeling of grid-forming and grid-following inverters for dynamic simulation of large-scale distribution systems. IEEE Trans. Power Del. 2021, 36, 2035–2045. [Google Scholar] [CrossRef]
- Schneider, K.P.; Radhakrishnan, N.; Tang, Y.; Tuffner, F.K.; Liu, C.C.; Xie, J.; Ton, D. Improving primary frequency response to support networked microgrid operations. IEEE Trans. Power Syst. 2019, 34, 659–667. [Google Scholar] [CrossRef]
- Schneider, K.P.; Tuffner, F.K.; Elizondo, M.A.; Liu, C.-C.; Xu, Y.; Ton, D. Evaluating the feasibility to use microgrids as a resiliency resource. IEEE Trans. Smart Grid. 2017, 8, 687–696. [Google Scholar]
- Yao, Y.; Liu, W.; Jain, R. Power System Resilience Evaluation Framework and Metric Review. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference, New Orleans, LA, USA, 24–28 April 2022. [Google Scholar]
- He, J.; Li, Y.W. An Enhanced Microgrid Load Demand Sharing Strategy. IEEE Trans. Power Electron. 2012, 27, 3984–3995. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Canizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Farrokhabadi, M.; Ca, C.A.; Bhattacharya, K. Power Quality in Microgrids: An Overview. IEEE Access 2018, 6, 29587–29612. [Google Scholar]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems: Modeling, Control, and Applications; IEEE Press: Piscataway, NJ, USA, 2010; pp. 3–12. [Google Scholar]
- Savaghebi, M.; Jalilian, A.; Vasquez, J.C.; Guerrero, J.M. Secondary Control Scheme for Voltage Unbalance Compensation in an Islanded Droop-Controlled Microgrid. IEEE Trans. Smart Grid. 2012, 3, 797–807. [Google Scholar] [CrossRef]
- Xue, N.; Wu, X.; Gumussoy, S.; Muenz, U.; Mesanovic, A.; Dong, Z.; Bharati, G.; Chakraborty, S. Dynamic security optimization for N-1 secure operation of power system with 100% non-synchronous generation: First experiences from Hawaii Island. In Proceedings of the PES General Meeting, Washington, DC, USA, 26–29 July 2021. [Google Scholar]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Tan, Z.; Zhang, Y.; Liu, X.; Wang, H.; Li, J.; Zhang, Y.; Wang, L.; Li, W.; Zhang, Z.; Liu, Y. Entropy-enhanced few-shot learning with HHO for industrial machinery fault classification. Expert Syst. Appl. 2023, 210, 118533. [Google Scholar]
- Zhang, M.; Wang, D.; Xu, Y.; Zhang, H.; Feng, G.; Wang, H.; Gu, F.; Sinha, J.K.; Zhang, H.; Feng, G. Few-shot fault diagnosis using meta-learning and entropy-optimized deep features. IEEE Trans. Ind. Inform. 2022, 18, 133–143. [Google Scholar]
- Liu, Z.; Li, W.; Gao, M.; Zhang, Z.; Wang, R.; Guan, C.; Wang, Q.; Zhang, Z.; Li, W.; Gao, M. Multi-scale CNN with HHO optimization for intelligent fault diagnosis. Measurement 2021, 178, 109401. [Google Scholar]
- Guo, Y.; Zhang, Z.; Li, W.; Wang, R.; Guan, C.; Wang, Q.; Zhang, Z.; Li, W.; Wang, R.; Guan, C. Fault diagnosis based on image entropy fusion and deep CNN. IEEE Access 2021, 9, 45522–45534. [Google Scholar]
- Schneider, K.P.; Tuffner, F.K.; Elizondo, M.A.; Liu, C.-C.; Xu, Y.; Backhaus, S.; Ton, D. Enabling Resiliency Operations Across Multiple Microgrids with Grid Friendly Appliance Controllers. IEEE Trans. Smart Grid 2018, 9, 4755–4764. [Google Scholar] [CrossRef]
- Li, P.; Ji, H.; Wang, C.; Zhao, J.; Song, G.; Ding, F.; Wu, J. Coordinated Control Method of Voltage and Reactive Power for Active Distribution Networks Based on Soft Open Point. IEEE Trans. Sustain. Energy 2017, 8, 1430–1442. [Google Scholar] [CrossRef]
- Zeng, Y.; Wang, Y.; Li, P. Unified Active and Reactive Power Coordinated Optimization for Unbalanced Distribution Networks in Radial and Looped Topology. Front. Energy Res. 2022, 9, 840014. [Google Scholar] [CrossRef]
- Du, W.; Liu, Y.; Tuffner, F.K.; Huang, R.; Huang, Z. Model Specification of Droop-Controlled, Grid-Forming Inverters (GFMDRP_A), Pacific Northwest National Laboratory: Richland, WA, USA. 2021. Available online: https://www.pnnl.gov/main/publications/external/technical_reports/PNNL-32278.pdf (accessed on 30 June 2023).
- IEEE PES Distribution System Analysis Subcommittee. IEEE 123 Node Test Feeder Benchmark Documentation. IEEE Power and Energy Society. 2010. Available online: https://site.ieee.org/pes-testfeeders/resources/ (accessed on 1 April 2023).





| S/N | Evaluation Metrics | GFM-UDC Approach | Benchmark |
|---|---|---|---|
| 1 | Voltage deviation (%) | 2.8% | ±5% |
| 2 | Frequency recovery time | 1.57s | 2–5 s |
| 3 | Optimization run-time | 54 s | 1–5 min |
| 4 | Load curtailment reduction | 25.24% | Up to 30% |
| 5 | Active power loss (%) | 0.4% | 5% of total load |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alao, A.B.; Adeyanju, O.M.; Chamana, M.; Bayne, S.; Bilbao, A. Optimized Universal Droop Control Framework for Enhancing Stability and Resilience in Renewable-Dense Power Grids. Electronics 2025, 14, 2149. https://doi.org/10.3390/electronics14112149
Alao AB, Adeyanju OM, Chamana M, Bayne S, Bilbao A. Optimized Universal Droop Control Framework for Enhancing Stability and Resilience in Renewable-Dense Power Grids. Electronics. 2025; 14(11):2149. https://doi.org/10.3390/electronics14112149
Chicago/Turabian StyleAlao, Agboola Benjamin, Olatunji Matthew Adeyanju, Manohar Chamana, Stephen Bayne, and Argenis Bilbao. 2025. "Optimized Universal Droop Control Framework for Enhancing Stability and Resilience in Renewable-Dense Power Grids" Electronics 14, no. 11: 2149. https://doi.org/10.3390/electronics14112149
APA StyleAlao, A. B., Adeyanju, O. M., Chamana, M., Bayne, S., & Bilbao, A. (2025). Optimized Universal Droop Control Framework for Enhancing Stability and Resilience in Renewable-Dense Power Grids. Electronics, 14(11), 2149. https://doi.org/10.3390/electronics14112149