
Introducing the Adaptive Nonlinear Input Impedance Control Approach for MPPT of Renewable Generators

Abstract
1. Introduction
2. I2C-MPPT Model for Renewable Energy Sources
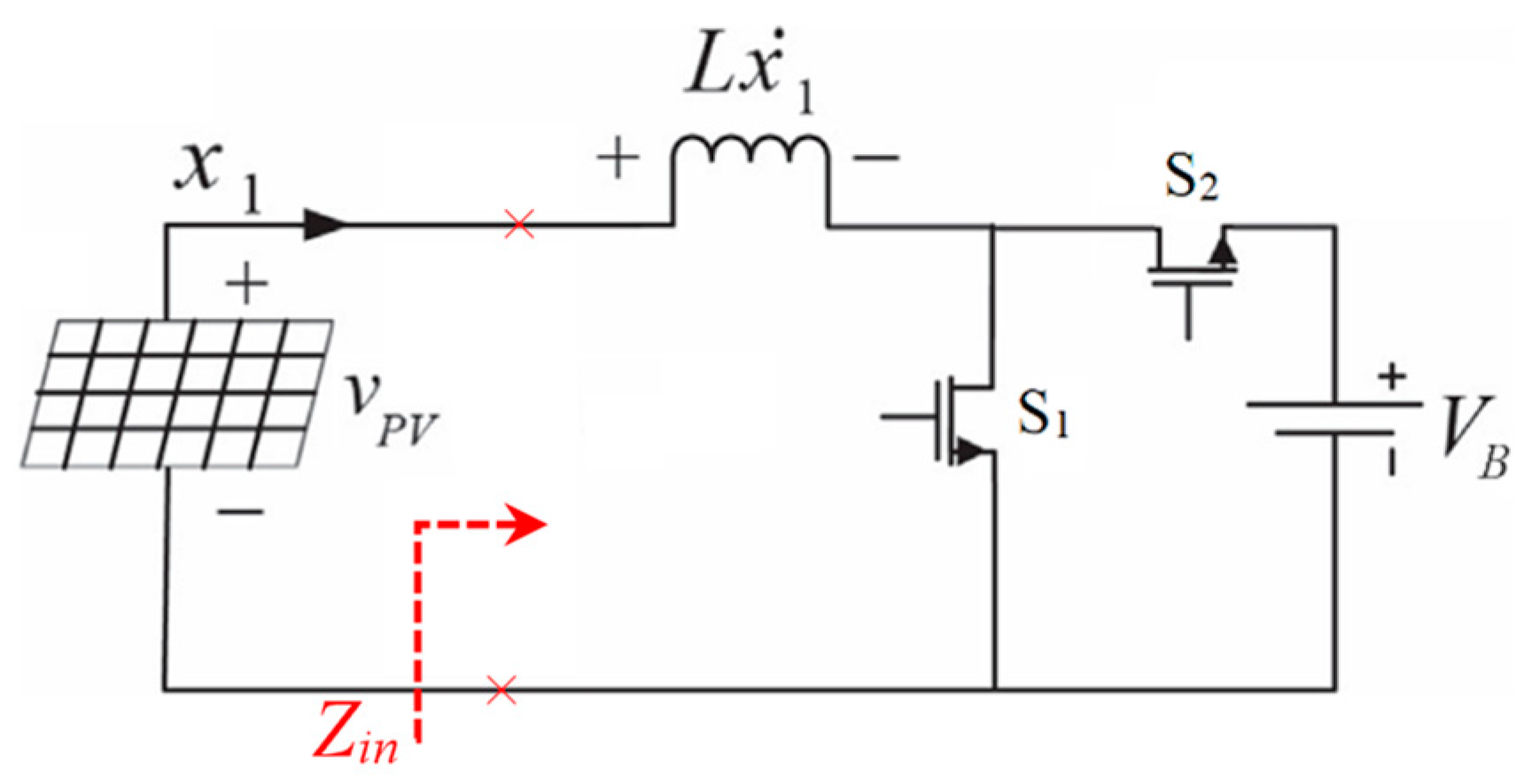
2.1. Input Impedance of the DC–DC Boost Converter (Zin)
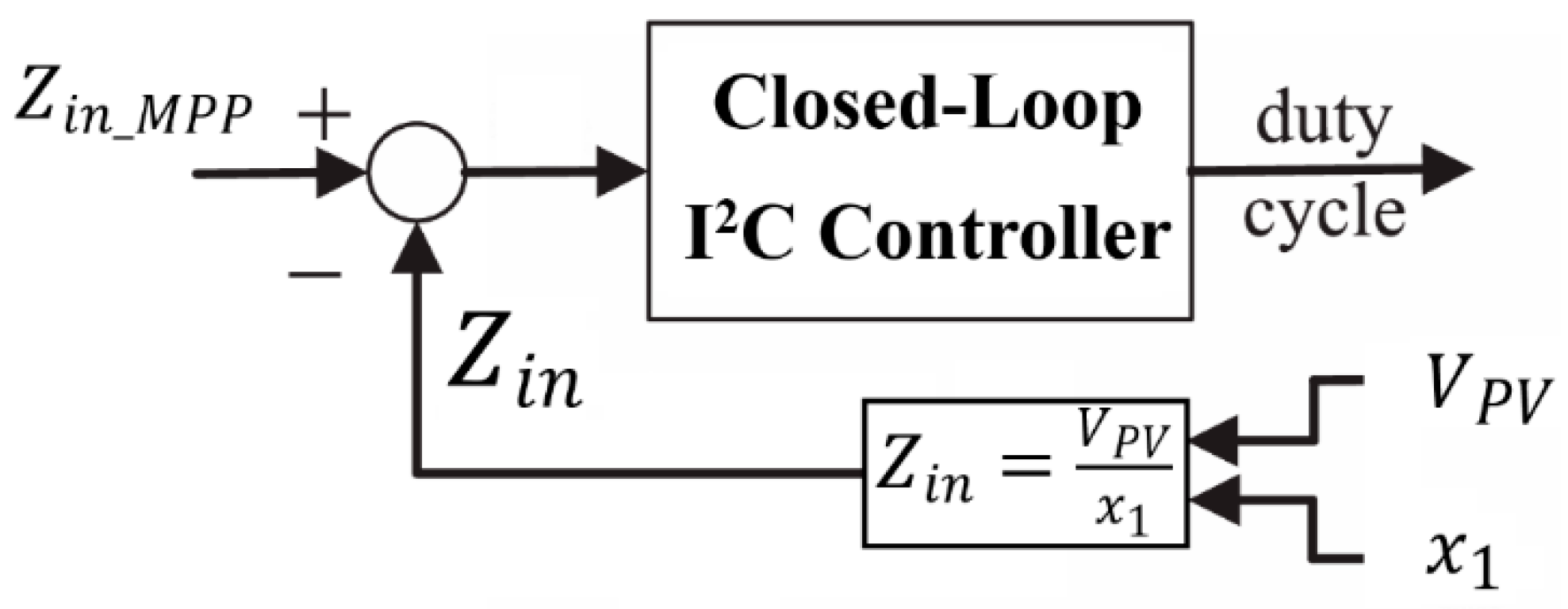
2.2. I2C-MPPT Model
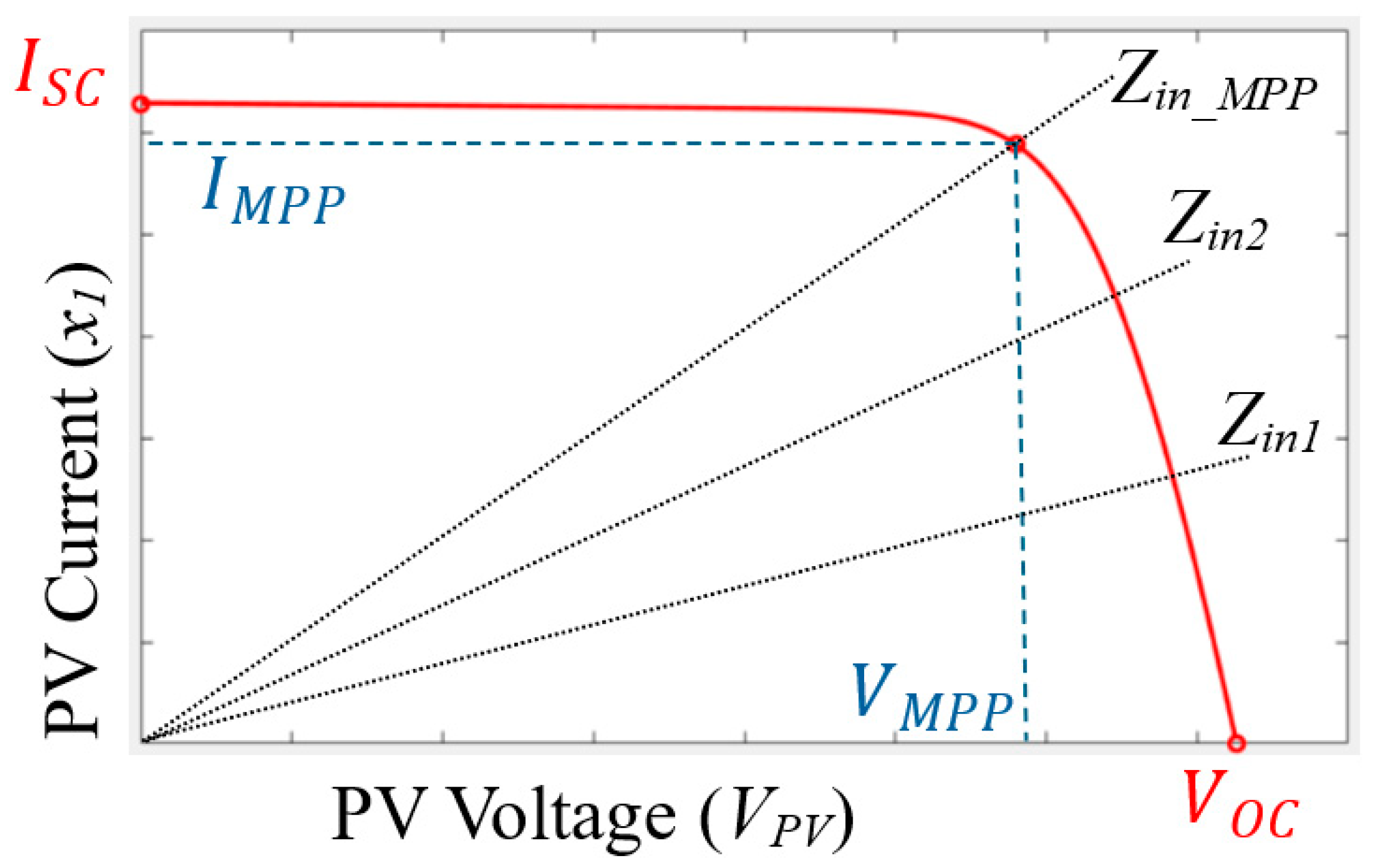
2.3. Reference Signal Estimation
3. System Modelling and I2C-MPPT Design
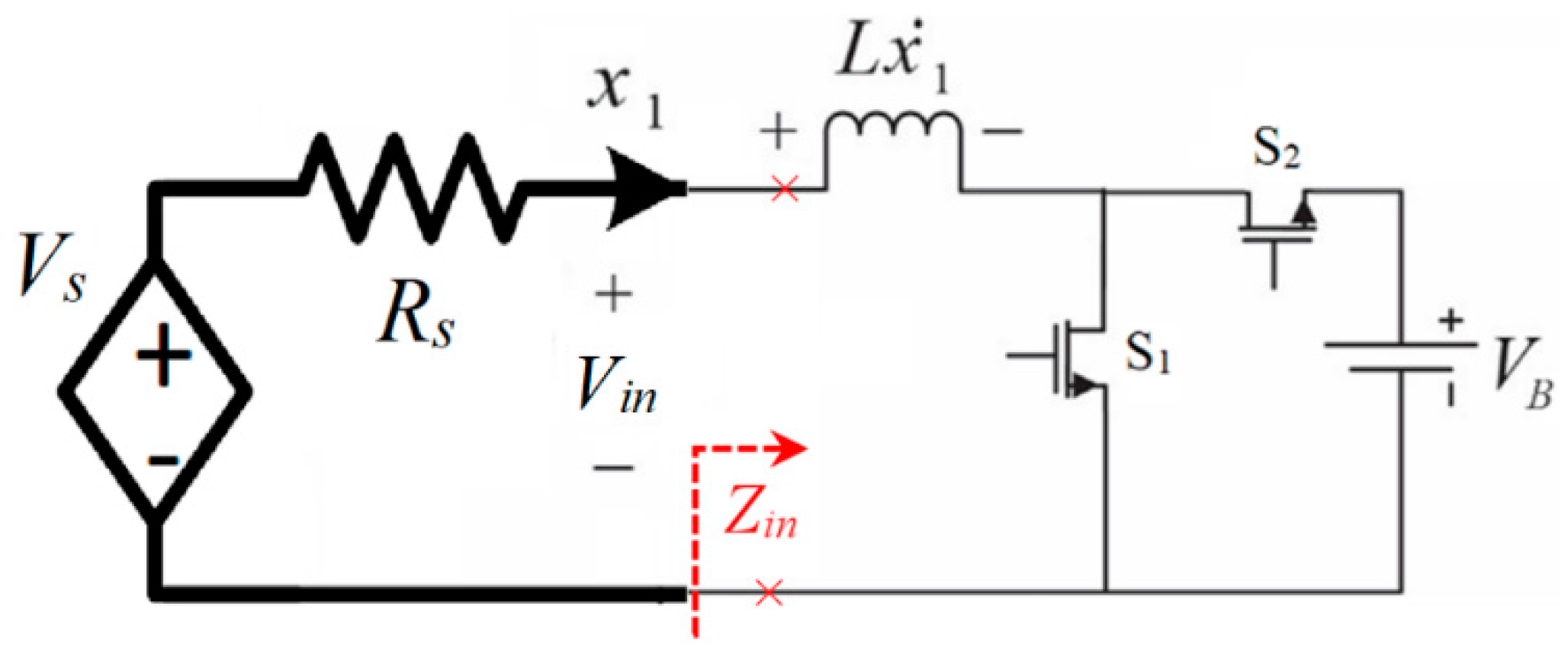
3.1. System Modelling
3.1.1. Switching State 1 (S1: ON, S2: OFF)
3.1.2. Switching State 2 (S1: OFF, S2: ON)
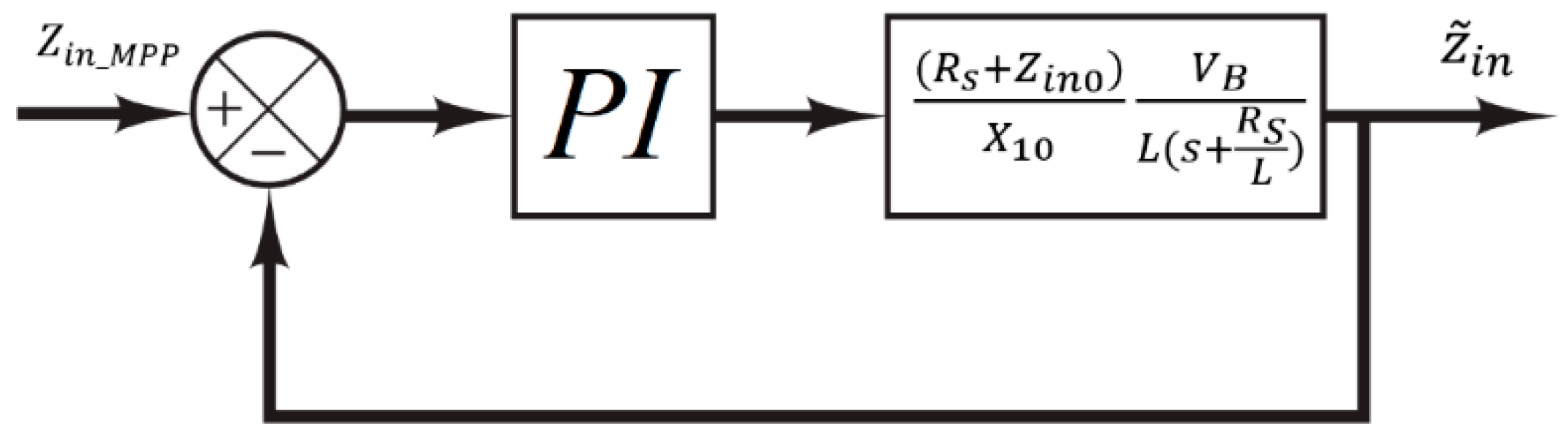
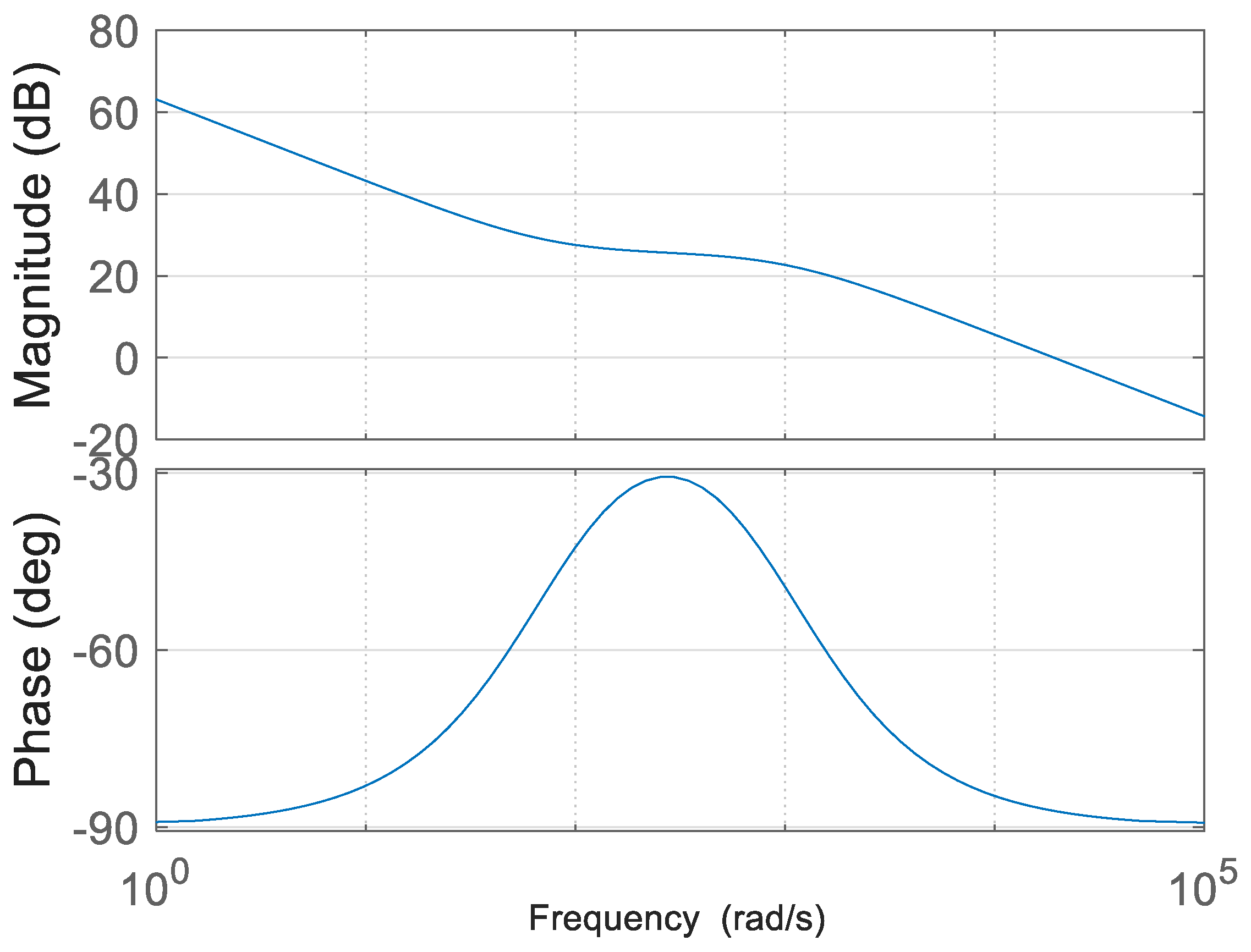
3.2. Model Linearisation and PI Control
3.3. Lyapunov-Based Adaptive Nonlinear I2C-MPPT Design
4. Simulation and Experimental Results
4.1. Simulation Results
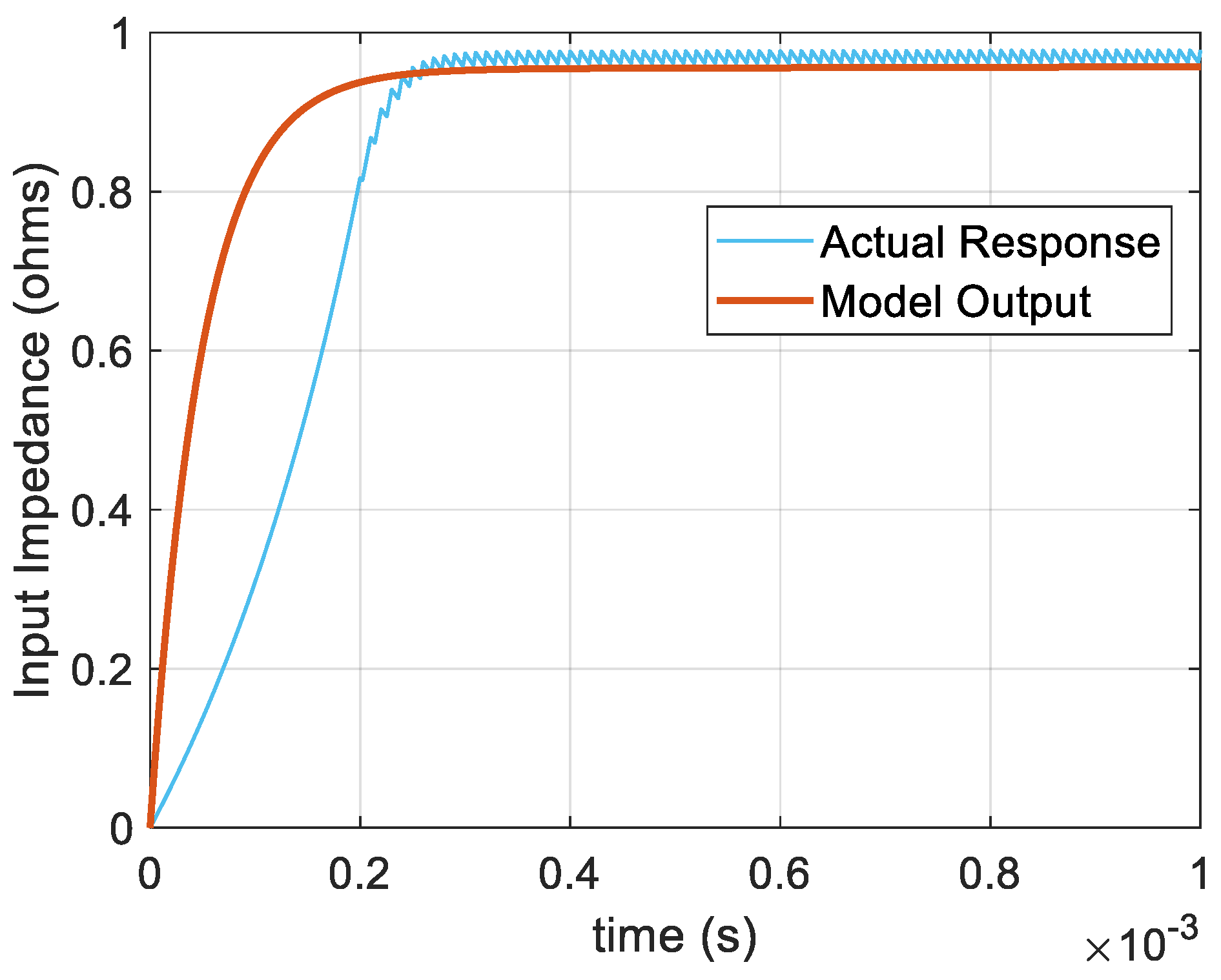
- Test 1: Evaluation of the Linearised Model
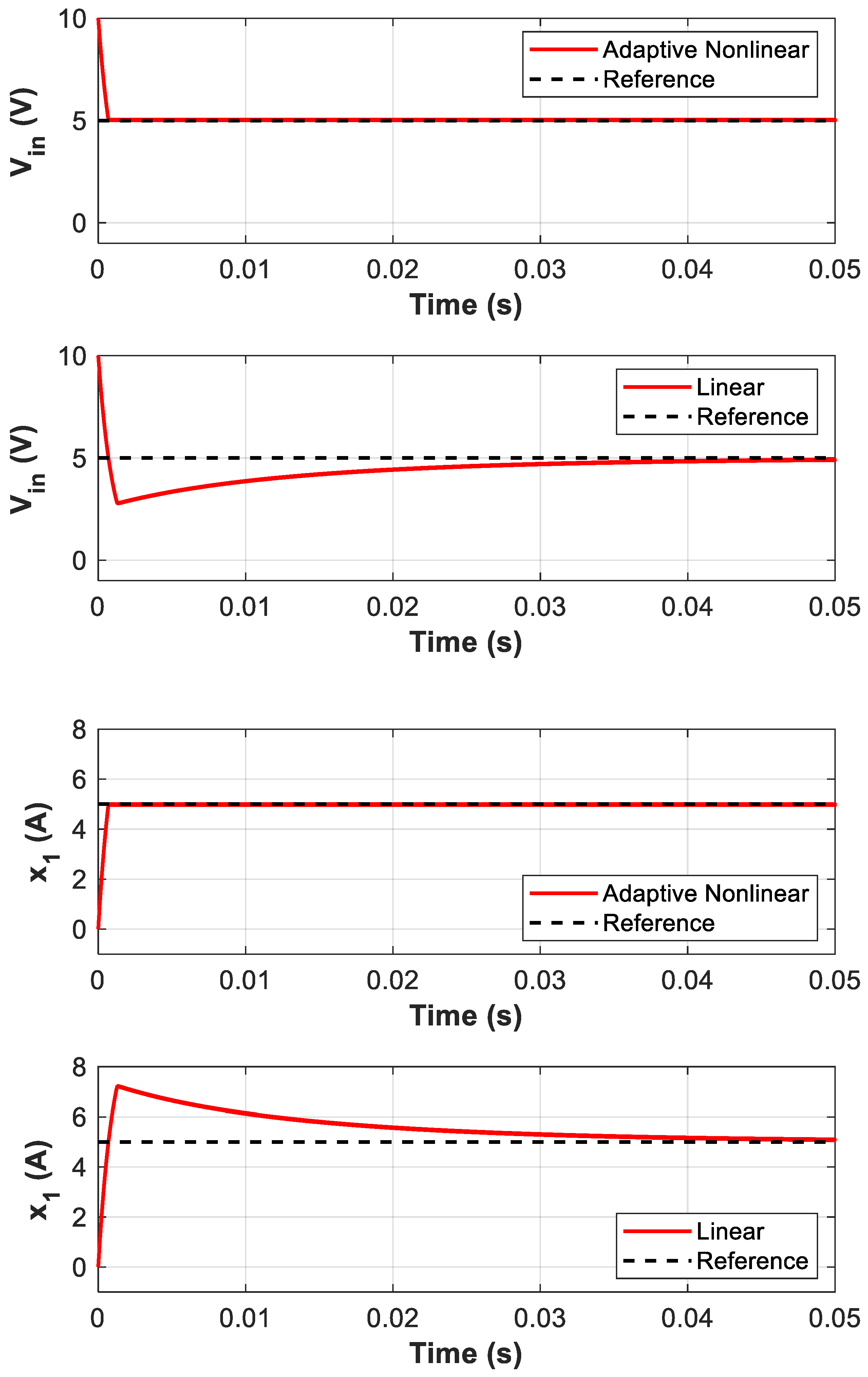
- Test 2: Comparison of Linear and Adaptive Nonlinear Controllers
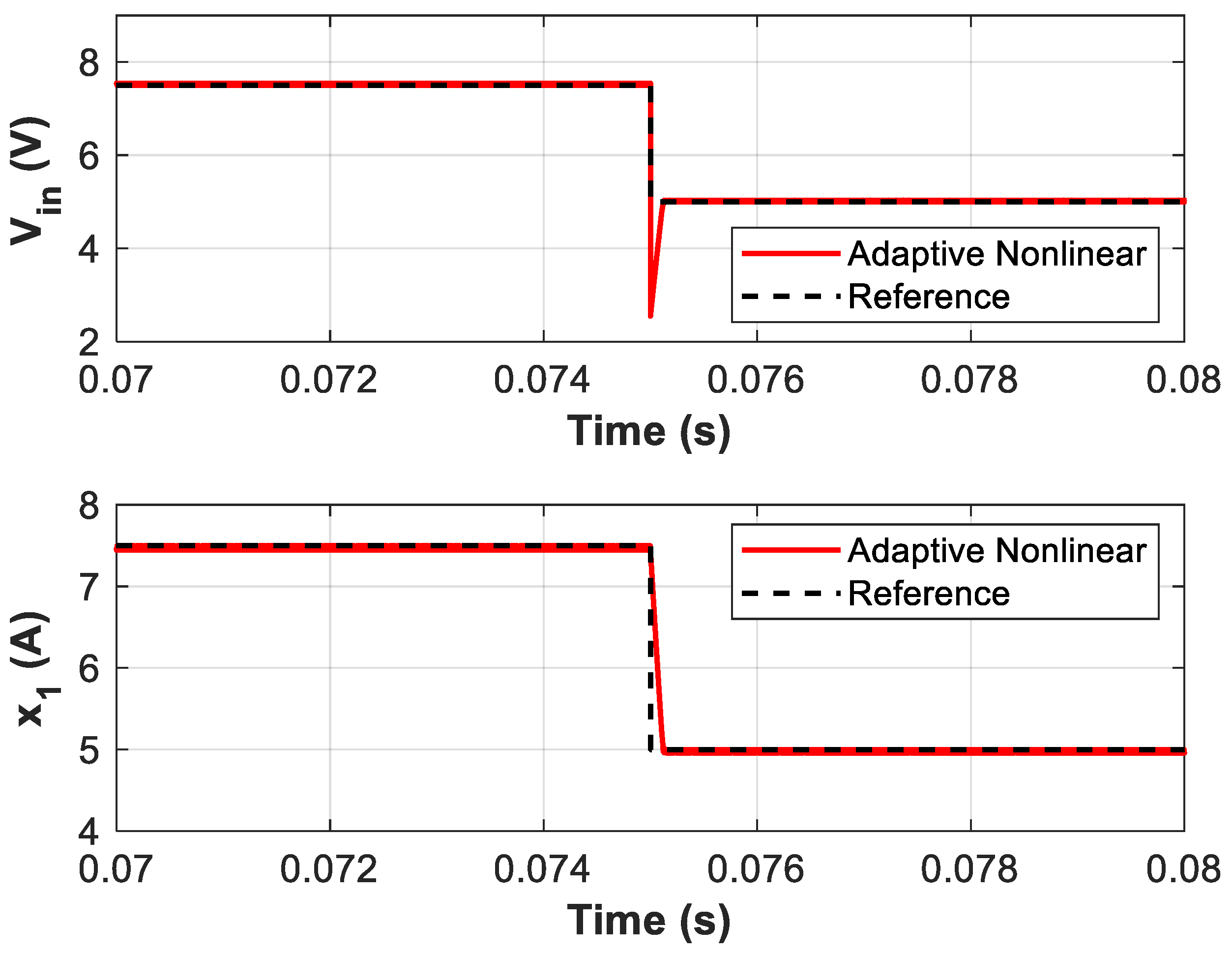
- Test 3: Response to Open-Circuit Voltage Changes
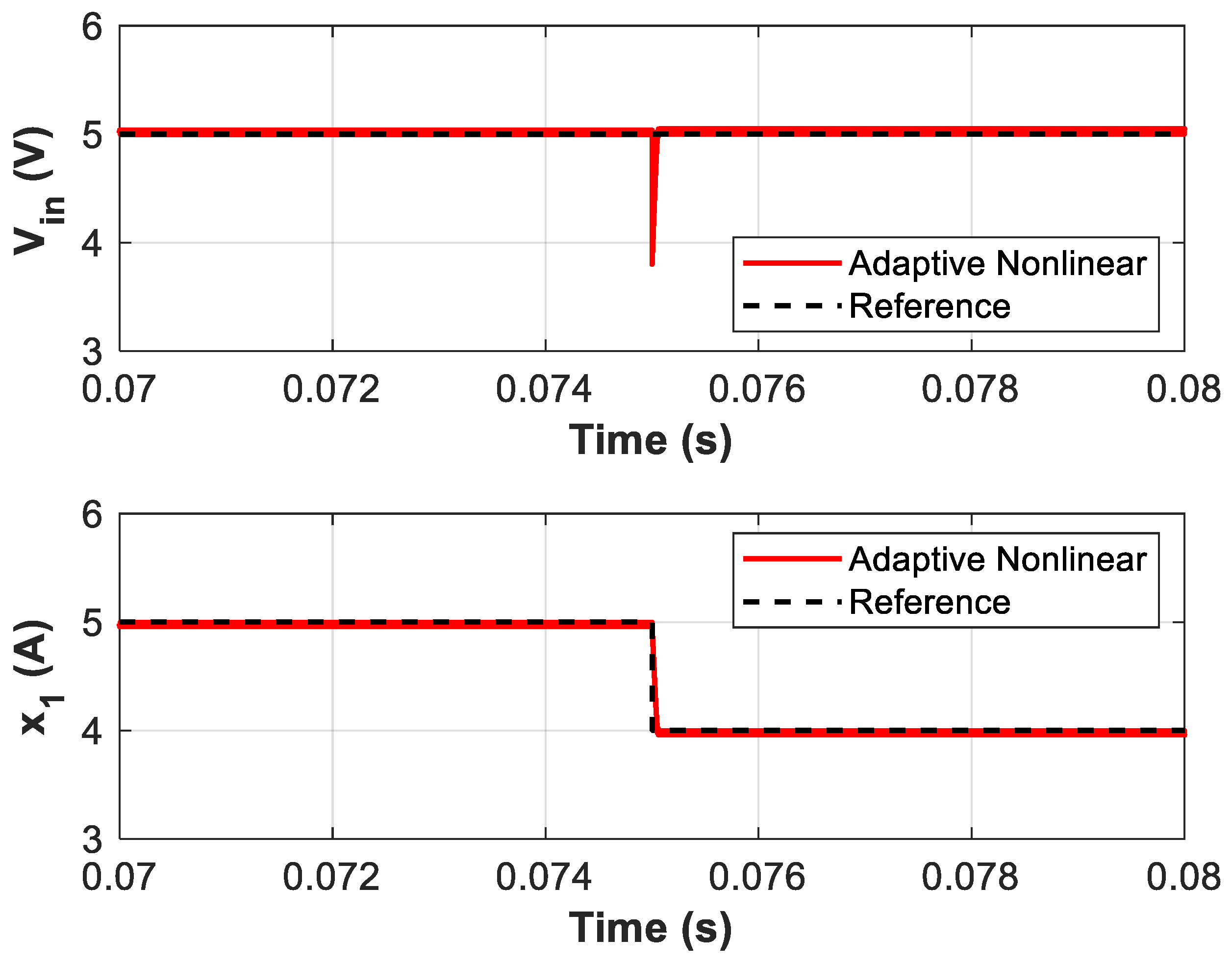
- Test 4: Response to Internal Resistance Changes
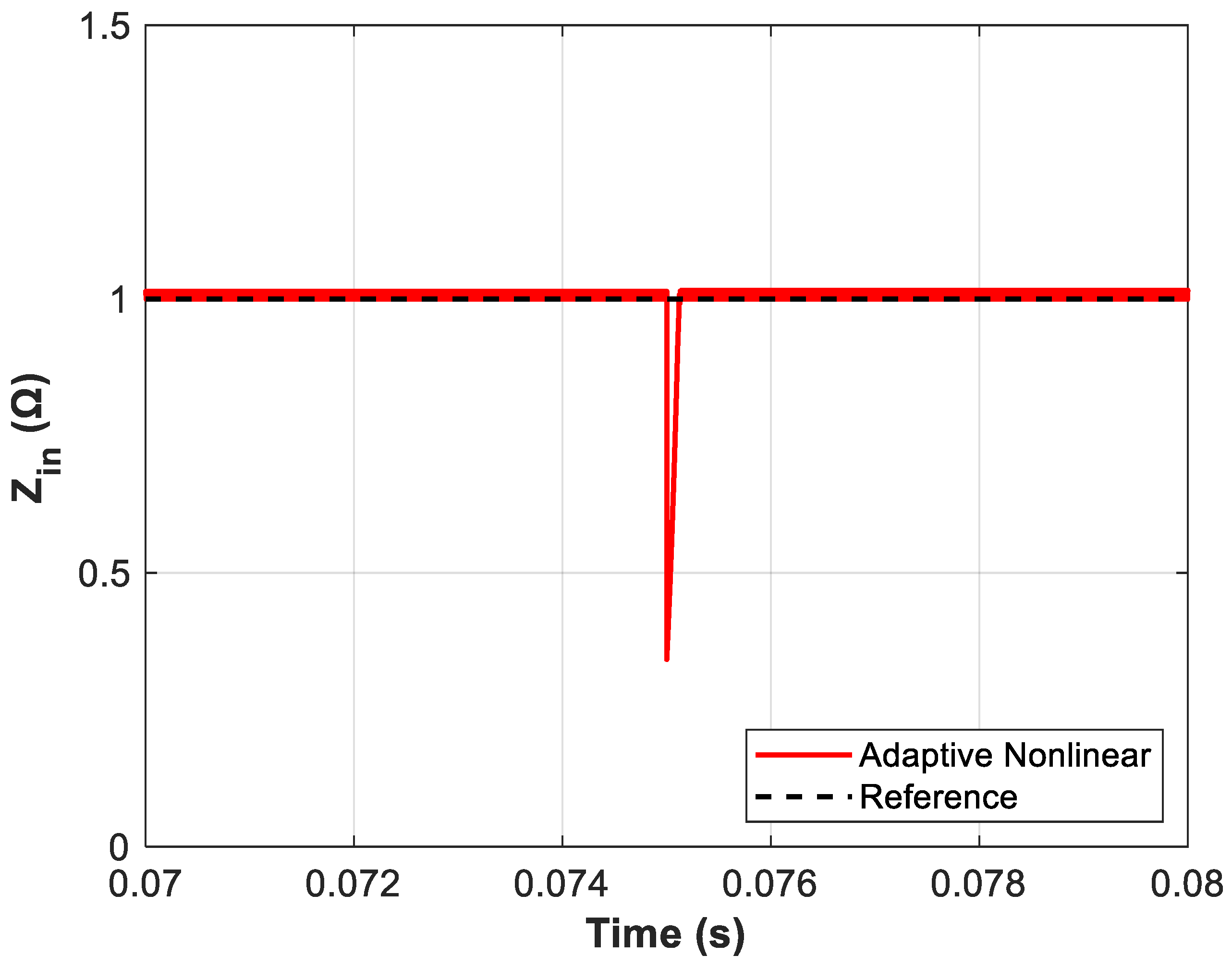
- Test 5: Input Impedance Variation
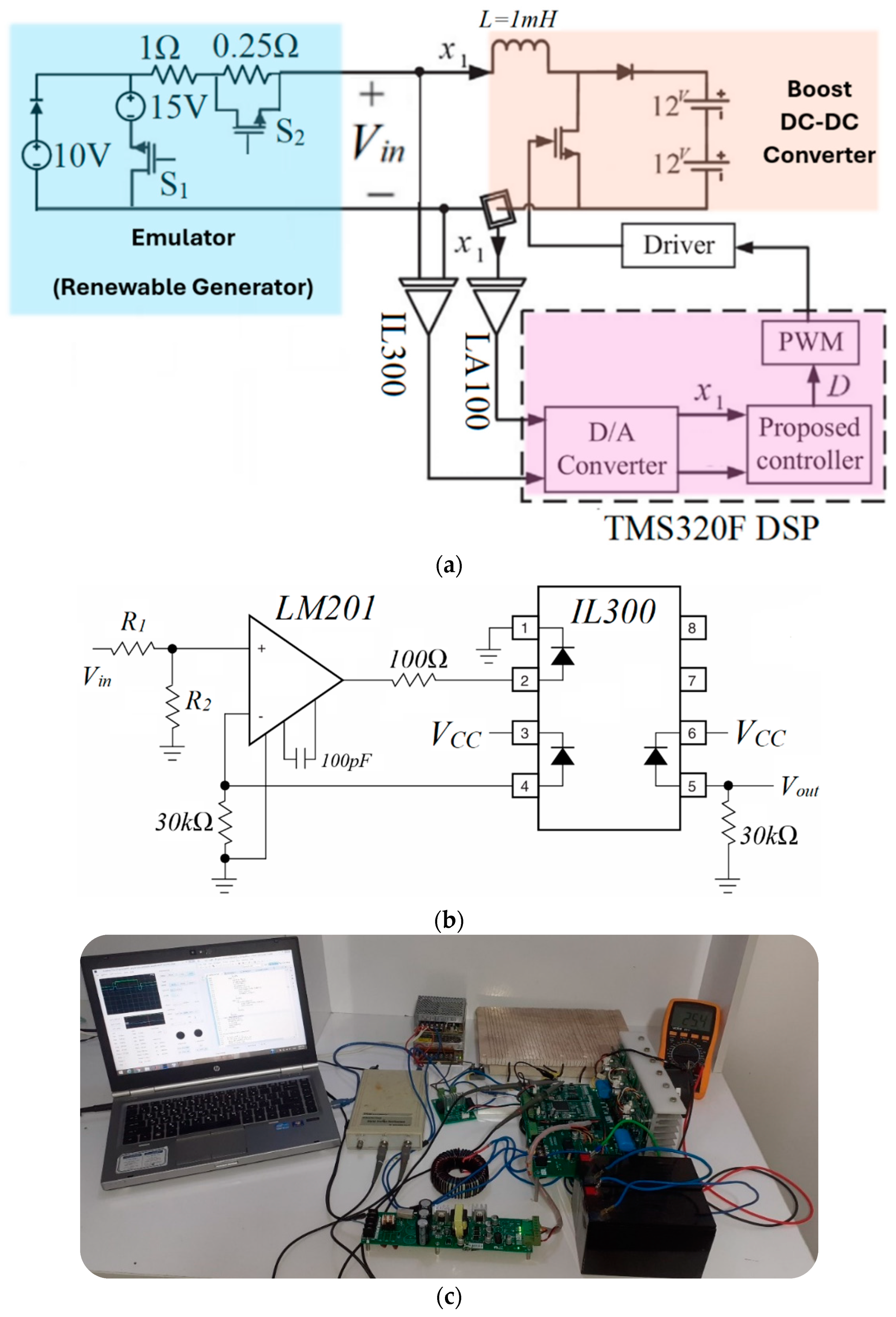
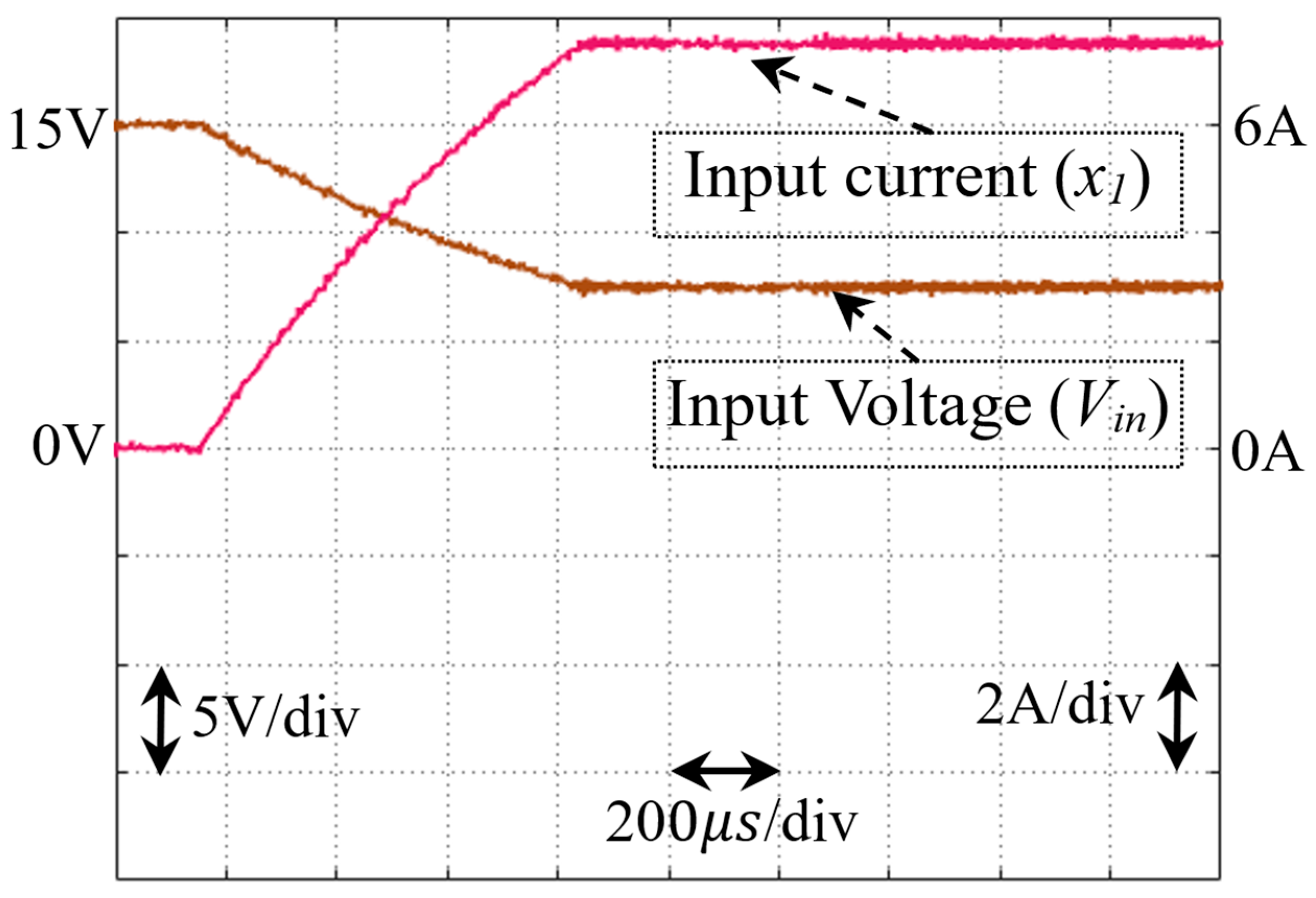
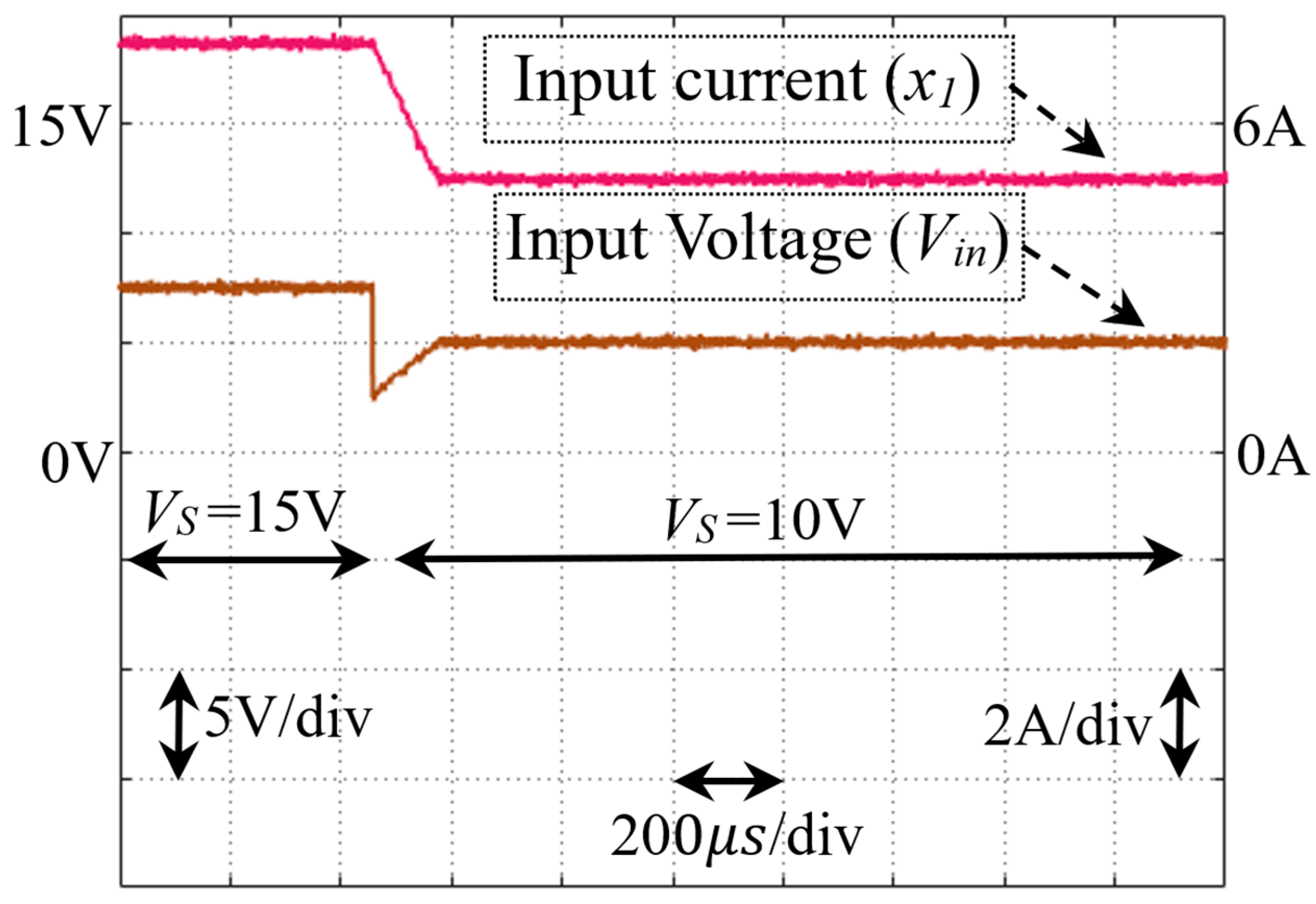
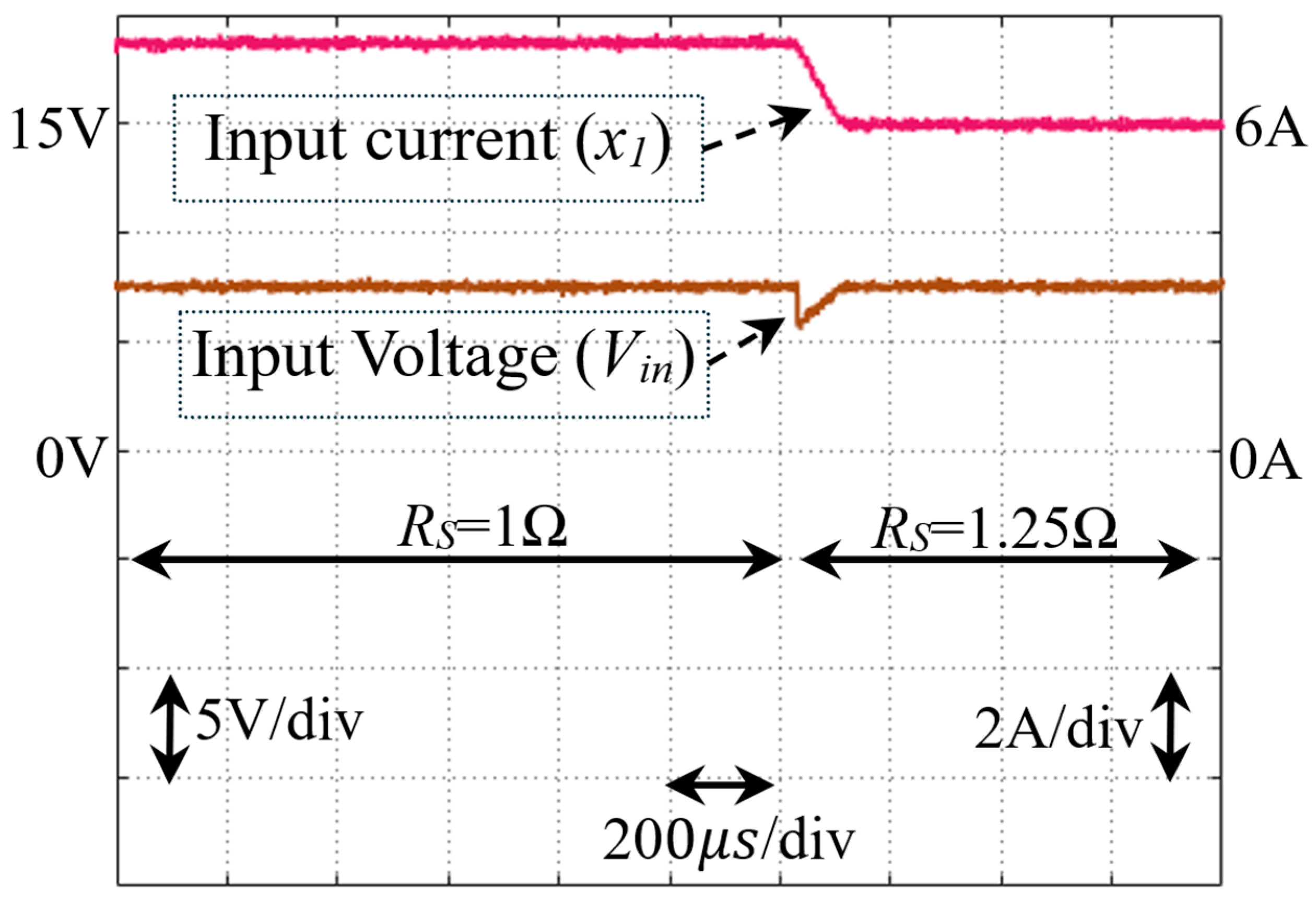
4.2. Experimental Results
5. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mosetlhe, T.; Yusuff, A.; Ayodele, T.; Ogunjuyigbe, A. Sustainable Rural Electrification through Micro-Grids in Developing Nations—A Review of Recent Development. Energy Rep. 2025, 13, 1171–1177. [Google Scholar] [CrossRef]
- Kaplani, E. Design and Performance Considerations in Standalone PV Powered Telecommunication Systems. IEEE Lat. Am. Trans. 2012, 10, 1723–1729. [Google Scholar] [CrossRef]
- Saxena, A.; Aishwarya, B.; Badhoutiya, A.; Raj, V.H.; Gupta, M.; Khayoon, A.T. Designing a Resilient Microgrid for Disaster-Prone Areas Using Renewable Energy Sources. In Proceedings of the 2024 International Conference on Trends in Quantum Computing and Emerging Business Technologies, Pune, India, 22–23 March 2024; pp. 1–6. [Google Scholar]
- Rehman, A.U.; Alamoudi, Y.; Khalid, H.M.; Morchid, A.; Muyeen, S.M.; Abdelaziz, A.Y. Smart Agriculture Technology: An Integrated Framework of Renewable Energy Resources, IoT-Based Energy Management, and Precision Robotics. Clean. Energy Syst. 2024, 9, 100132. [Google Scholar] [CrossRef]
- Yang, O.; Xie, R.; Duan, J.; Wang, J. State-of-the-Art Review of MPPT Techniques for Hybrid PV-TEG Systems: Modeling, Methodologies, and Perspectives. Glob. Energy Interconnect. 2023, 6, 567–591. [Google Scholar] [CrossRef]
- Zhang, X.; Jia, J.; Zheng, L.; Yi, W.; Zhang, Z. Maximum Power Point Tracking Algorithms for Wind Power Generation System: Review, Comparison and Analysis. Energy Sci. Eng. 2023, 11, 430–444. [Google Scholar] [CrossRef]
- Shen, J.; Xia, Y.; Xia, H. ReL-SSHI Rectifier-Based Piezoelectric Energy Harvesting Circuit with MPPT Control Technique. Microelectron. J. 2022, 121, 105379. [Google Scholar] [CrossRef]
- Zhong, W.; Zhang, M.; Zhang, J.; Liu, J.; Yu, H. Constrained MPPT Strategy for Sustainable Wave Energy Converters with Magnetic Lead Screw. Sustainability 2024, 16, 4847. [Google Scholar] [CrossRef]
- Khadidja, S.; Mountassar, M.; M’hamed, B. Comparative Study of Incremental Conductance and Perturb & Observe MPPT Methods for Photovoltaic System. In Proceedings of the 2017 International Conference on Green Energy Conversion Systems (GECS), Hammamet, Tunisia, 23–25 March 2017; pp. 1–6. [Google Scholar]
- Mishra, J.; Das, S.; Kumar, D.; Pattnaik, M. Performance Comparison of P&O and INC MPPT Algorithm for a Stand-Alone PV System. In Proceedings of the 2019 Innovations in Power and Advanced Computing Technologies (i-PACT), Vellore, India, 22–23 March 2019; pp. 1–5. [Google Scholar]
- Li, Z.; Dewantoro, G.; Xiao, T.; Swain, A. A Comparative Analysis of Fuzzy Logic Control and Model Predictive Control in Photovoltaic Maximum Power Point Tracking. Electronics 2025, 14, 1009. [Google Scholar] [CrossRef]
- Bandara, A.; Ratnayake, K.; Dissanayake, R.; Udawatte, H.; Godaliyadda, R.; Ekanayake, P.; Ekanayake, J. LSTM-Based MPPT Algorithm for Efficient Energy Harvesting of a Solar PV System Under Different Operating Conditions. Electronics 2024, 13, 4875. [Google Scholar] [CrossRef]
- Zhu, W.; Li, P.; Yang, W.; Xie, C.; Li, H.; Yang, Y. Maximum Power Point Tracking Using a Multimode Hunter-Prey Optimization Algorithm for Gradually Varying Power in Centralized Thermoelectric Generation System. Energy Technol. 2025, 2402070. [Google Scholar] [CrossRef]
- Abdel-Rahim, O.; Wang, H. A New High Gain DC-DC Converter with Model-Predictive-Control-Based MPPT Technique for Photovoltaic Systems. CPSS Trans. Power Electron. Appl. 2020, 5, 191–200. [Google Scholar] [CrossRef]
- Ko, J.-S.; Chung, D.-H. The MPPT Control of PV System Using the Series-Connected PI Controller. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Republic of Korea, 16–19 October 2016; pp. 807–809. [Google Scholar]
- Siddula, S. Analysis of Fuzzy Logic Based MPPT Using Incremental Conductance Technique for PV Cell. In Proceedings of the 2020 International Conference on Smart Technologies in Computing, Electrical and Electronics (ICSTCEE), Bengaluru, India, 9–10 October 2020; pp. 180–185. [Google Scholar]
- Khelifi, B.; Zdiri, M.A.; Ben Salem, F. Machine Learning for Solar Power Systems—A Short Tour. In Proceedings of the 2021 12th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 26–28 October 2021; pp. 1–6. [Google Scholar]
- Pradhan, R.; Subudhi, B. Double Integral Sliding Mode MPPT Control of a Photovoltaic System. IEEE Trans. Control Syst. Technol. 2016, 24, 285–292. [Google Scholar] [CrossRef]
- Salimi, M. Practical Implementation of the Lyapunov Based Nonlinear Controller in DC-DC Boost Converter for MPPT of the PV Systems. Sol. Energy 2018, 173, 246–255. [Google Scholar] [CrossRef]
- Hassan, A.; Bass, O.; Masoum, M.A.S. An Improved Genetic Algorithm Based Fractional Open Circuit Voltage MPPT for Solar PV Systems. Energy Rep. 2023, 9, 1535–1548. [Google Scholar] [CrossRef]
- Vishay Intertechnology. IL300 Linear Optocoupler—High Gain Stability, Wide Bandwidth. Available online: https://www.vishay.com (accessed on 22 April 2025).
- LEM International. LA 100-P Current Transducer Datasheet. Available online: https://www.lem.com (accessed on 22 April 2025).
- Zhai, X.; Li, Z.; Li, Z.; Xue, Y.; Chang, X.; Su, J.; Jin, X.; Wang, P.; Sun, H. Risk-Averse Energy Management for Integrated Electricity and Heat Systems Considering Building Heating Vertical Imbalance: An Asynchronous Decentralized Approach. Appl. Energy 2025, 383, 125271. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, Y.; Wu, C.; Tan, Y.; Li, Z.; Zhang, D. A Stochastic Bi-Level Optimal Allocation Approach of Intelligent Buildings Considering Energy Storage Sharing Services. IEEE Trans. Consum. Electron. 2024, 70, 5142–5153. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Open-Circuit Voltage | VS | 10 V |
| Internal Resistance | RS | 1 Ω |
| Load Voltage | VB | 24 V |
| Converter Inductance | L | 1 mH |
| Switching Frequency | fS | 100 kHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salimi, M. Introducing the Adaptive Nonlinear Input Impedance Control Approach for MPPT of Renewable Generators. Electronics 2025, 14, 1960. https://doi.org/10.3390/electronics14101960
Salimi M. Introducing the Adaptive Nonlinear Input Impedance Control Approach for MPPT of Renewable Generators. Electronics. 2025; 14(10):1960. https://doi.org/10.3390/electronics14101960
Chicago/Turabian StyleSalimi, Mahdi. 2025. "Introducing the Adaptive Nonlinear Input Impedance Control Approach for MPPT of Renewable Generators" Electronics 14, no. 10: 1960. https://doi.org/10.3390/electronics14101960
APA StyleSalimi, M. (2025). Introducing the Adaptive Nonlinear Input Impedance Control Approach for MPPT of Renewable Generators. Electronics, 14(10), 1960. https://doi.org/10.3390/electronics14101960