
Neural Moving Horizon Estimation: A Systematic Literature Review

 , ,
, ,
Abstract
1. Introduction
- What are the different approaches to designing NMHEs?
- What are the different structures of NNs used in NMHEs?
- How do different techniques compare in terms of state estimation accuracy and computational efficiency?
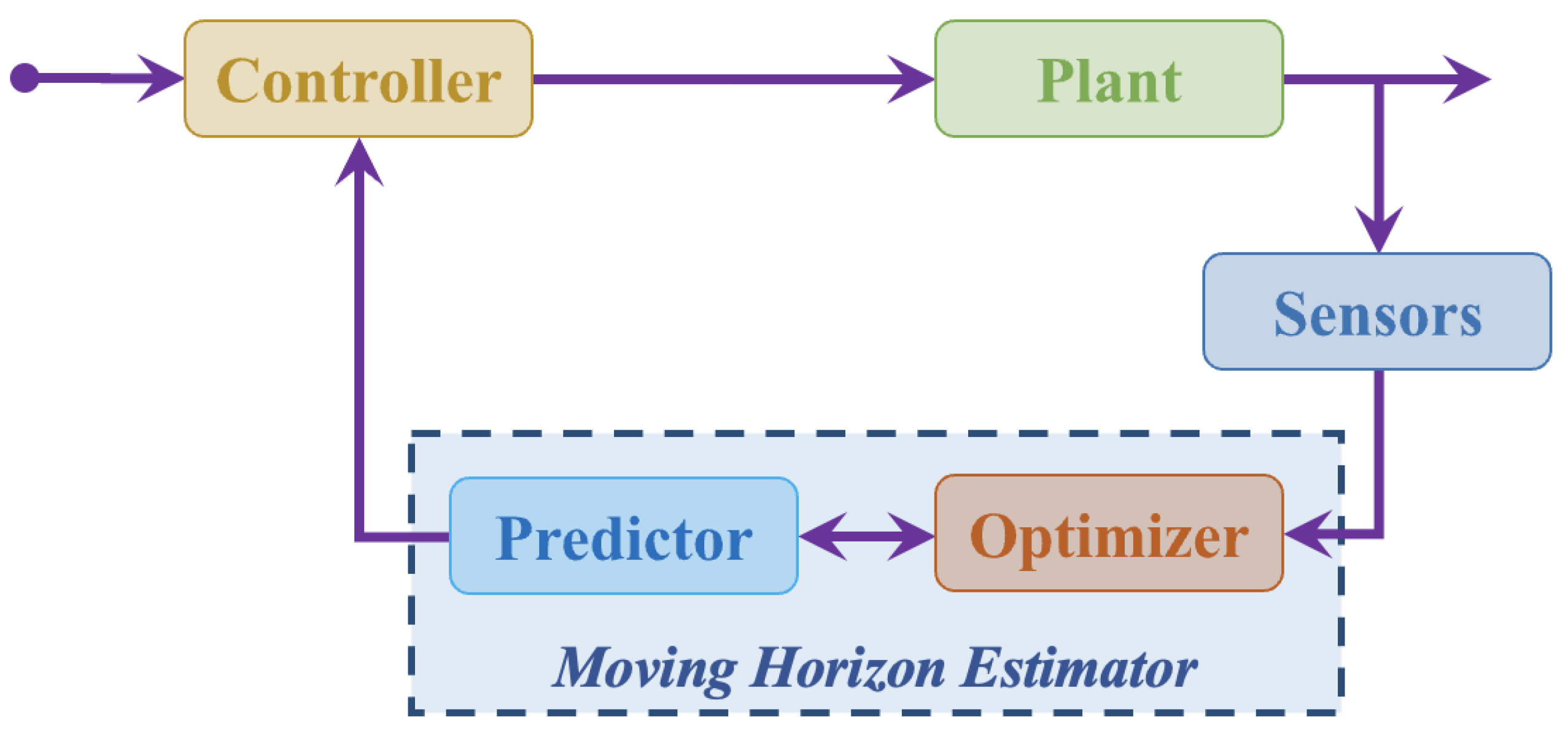
2. Overview of NMHE
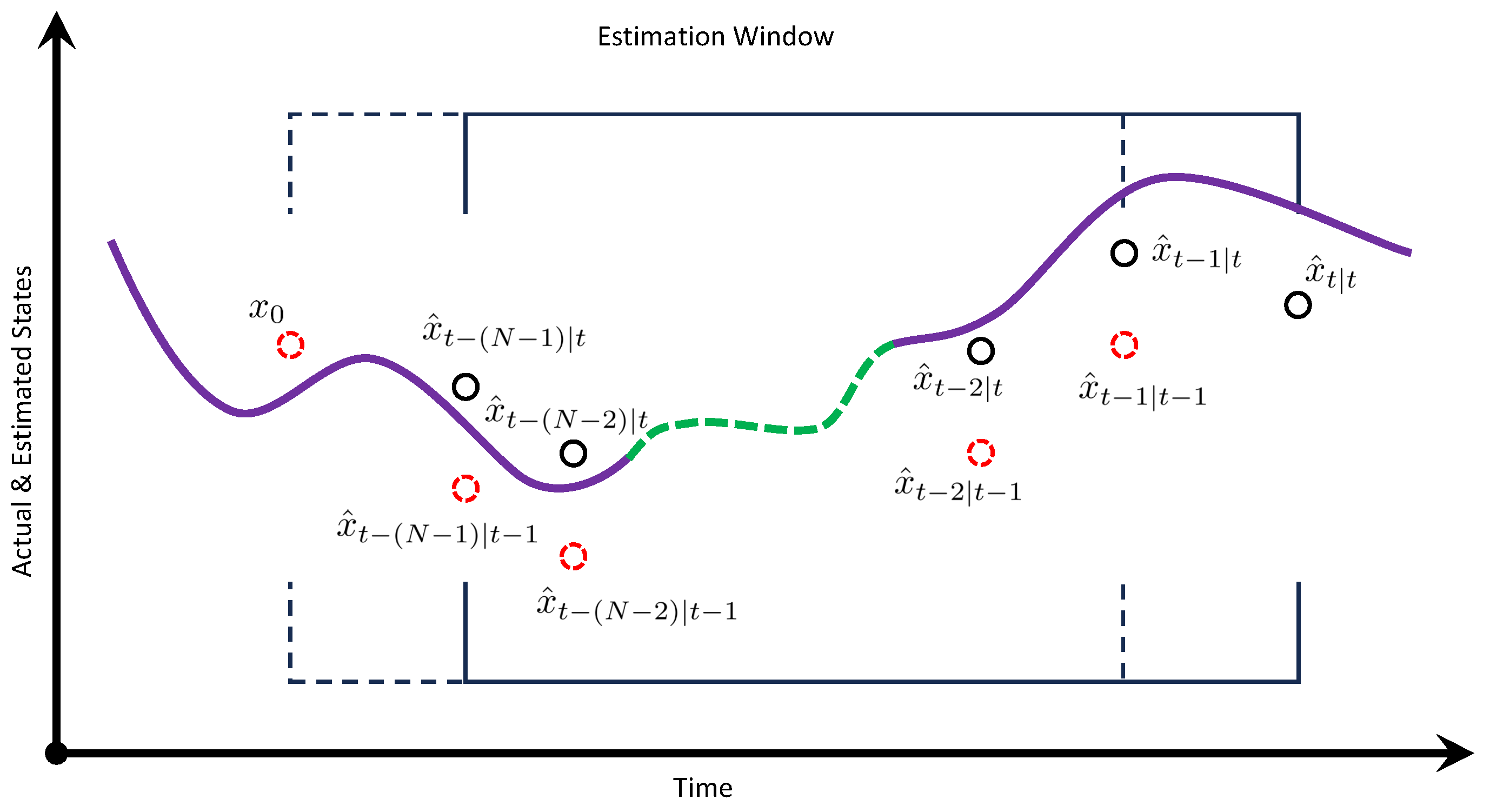
2.1. MHE Formulation
2.2. Integration of NNs with MHE
3. Review Methodology
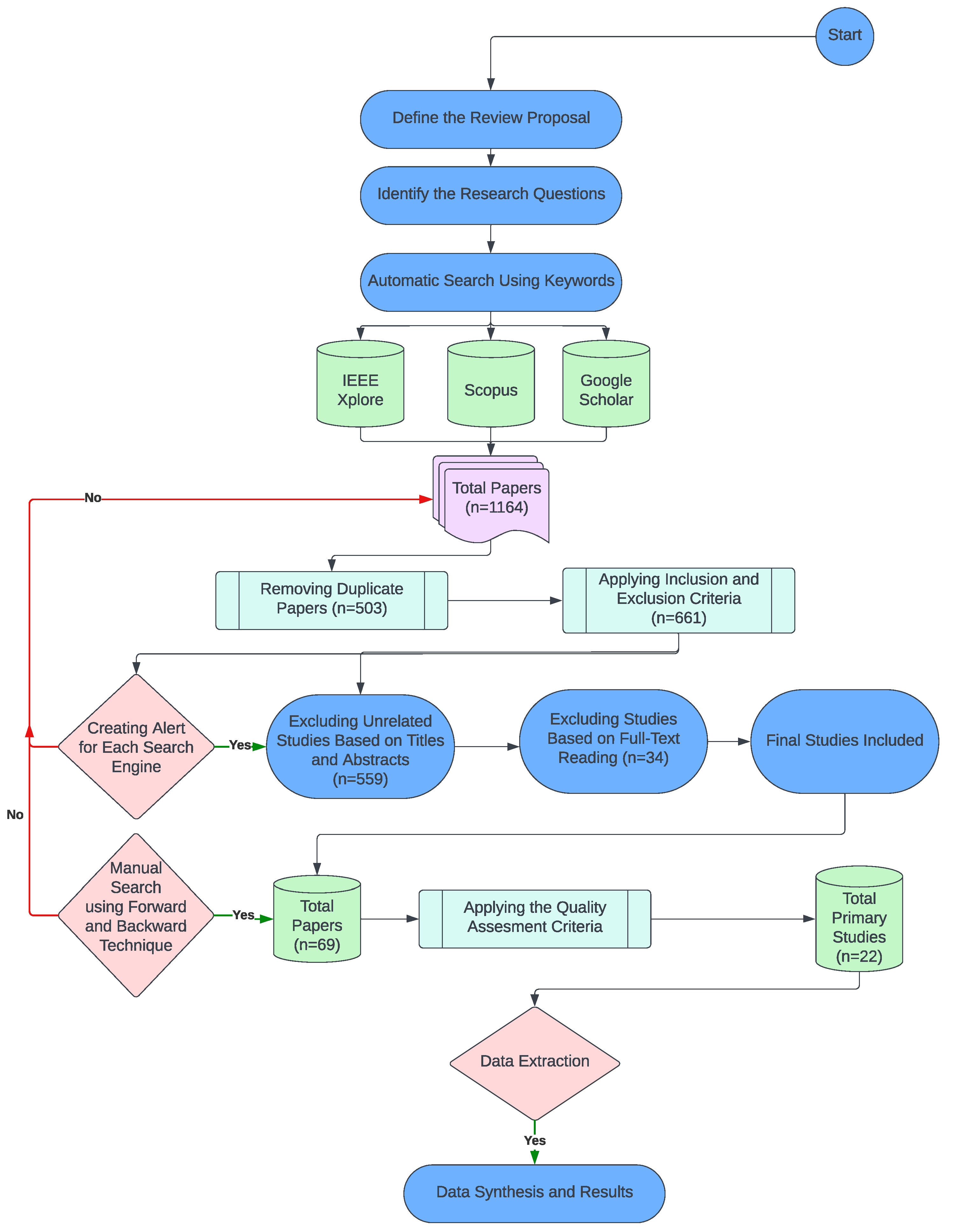
3.1. Search Strategy and Criteria
- Inclusion Criteria:
- Studies that directly involve NNs as a fundamental component of their data-driven MHE methodology.
- Peer-reviewed journal articles, conference papers, theses, and dissertations to ensure academic rigor.
- Research conducted within the last 15 years.
- Publications in the English language.
- Exclusion Criteria:
- Studies that do not focus on NMHE.
- Duplicate publications or multiple versions of the same study.
- Studies with limited relevance to the topic, specifically those that, upon full-text review, (i) did not incorporate an NN as an integral component of the estimation algorithm (e.g., NNs mentioned only in the introduction or future work) and/or (ii) did not employ an MHE formulation (e.g., lacked a finite-horizon optimization structure or moving window).
- Studies published before the specified time frame to ensure the focus on recent research.
- Studies that mention NNs but do not use them as a central component of their data-driven MHE approach.
- Publications in languages other than English, unless they provide English translations or summaries.
3.2. Study Selection
3.3. Data Extraction
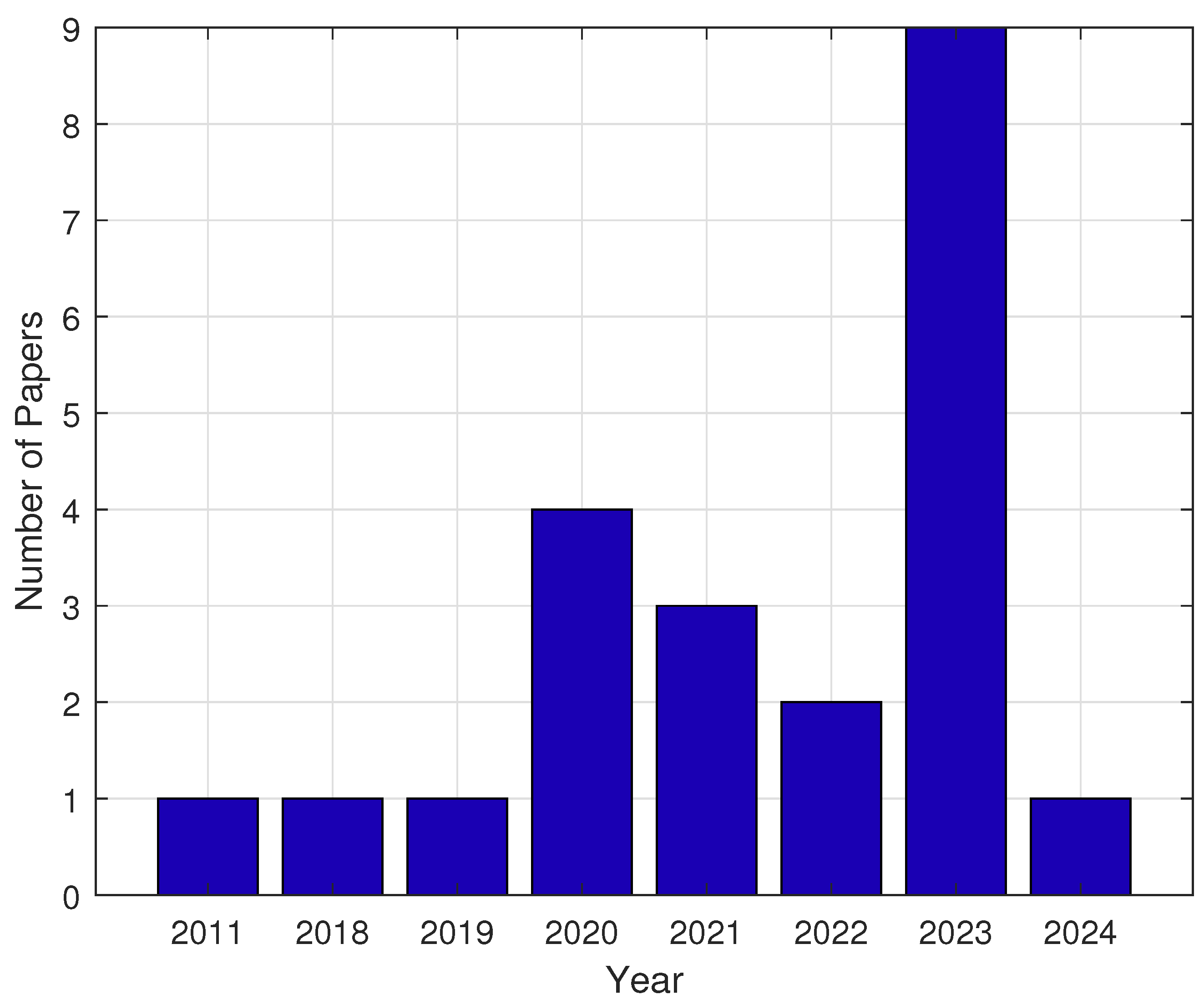
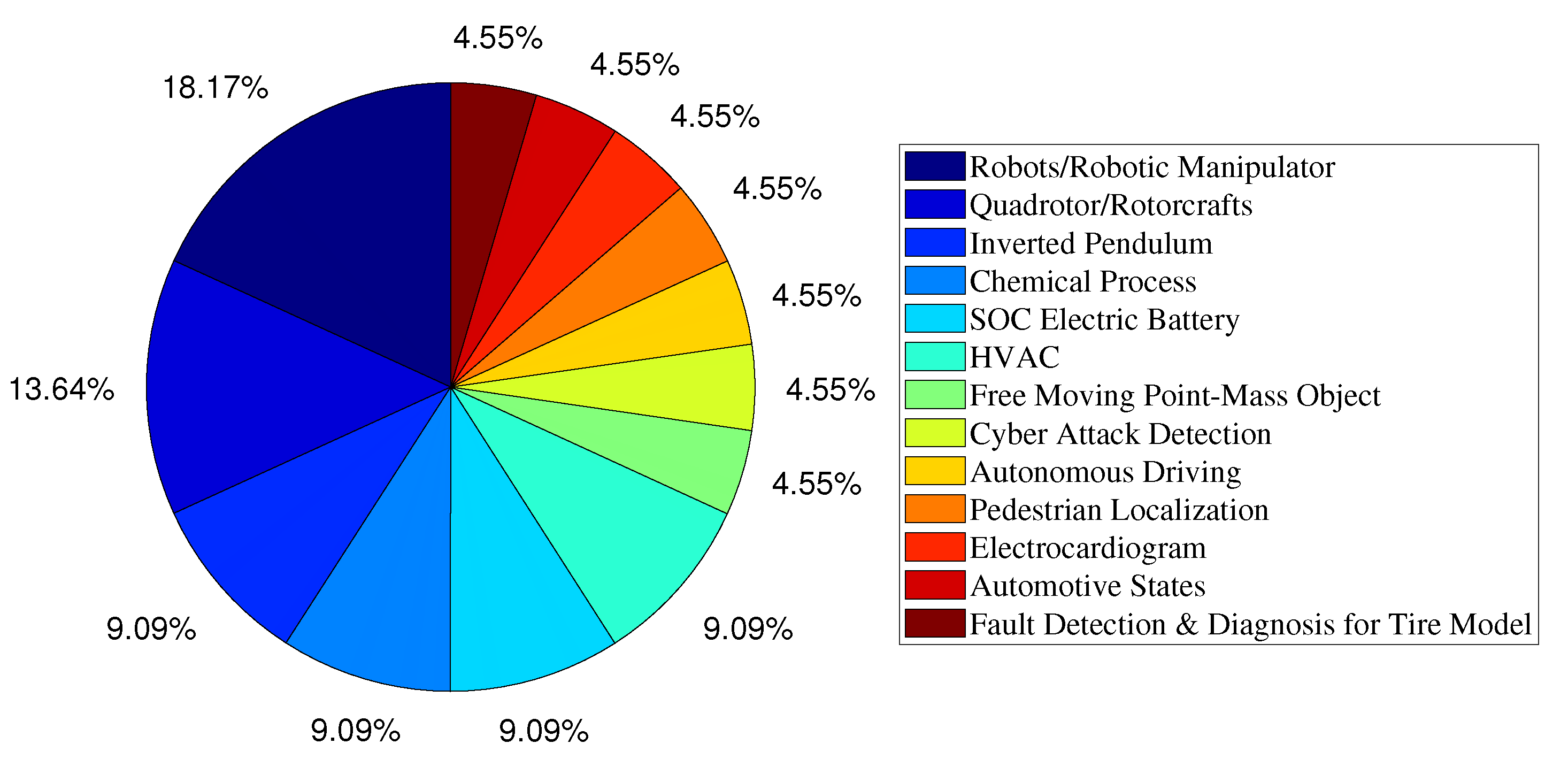
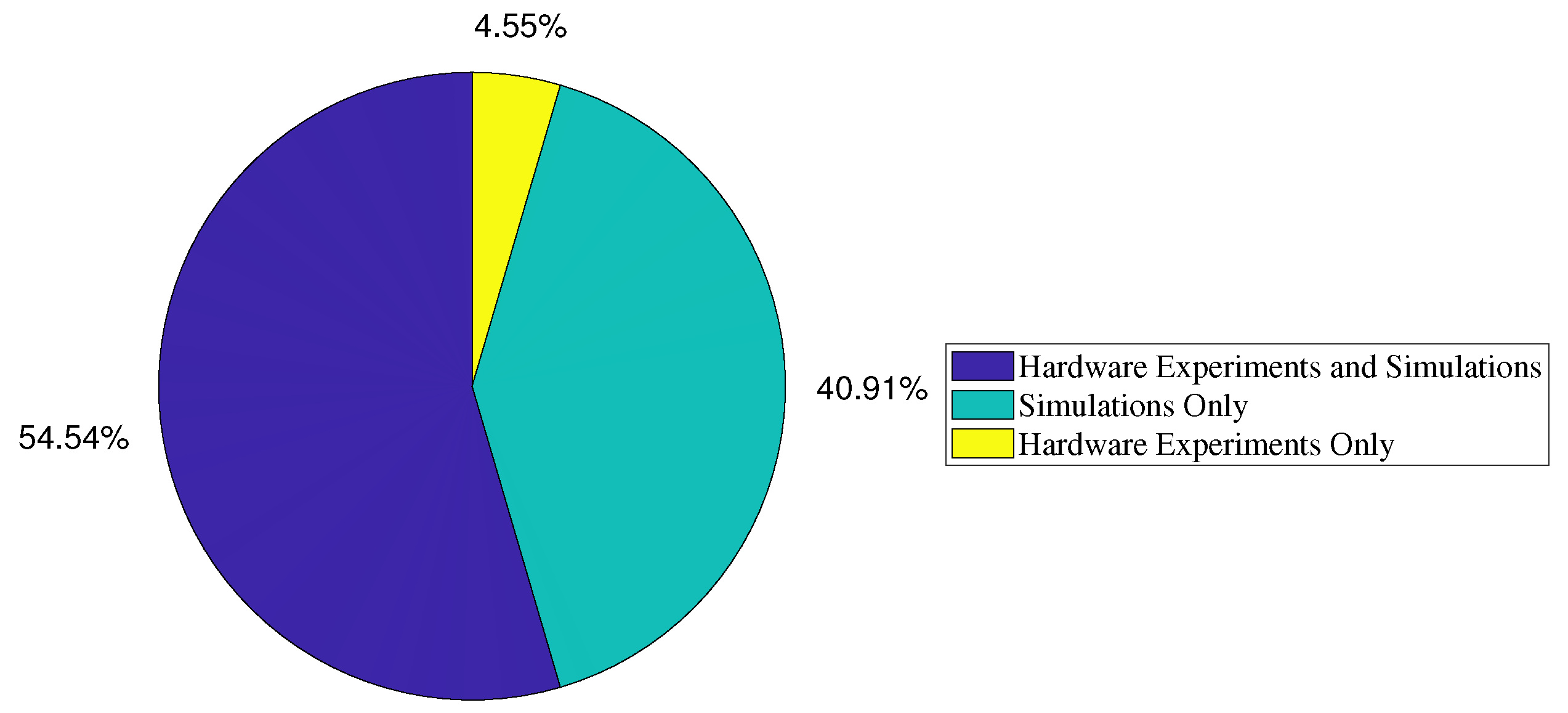
4. Descriptive Statistics
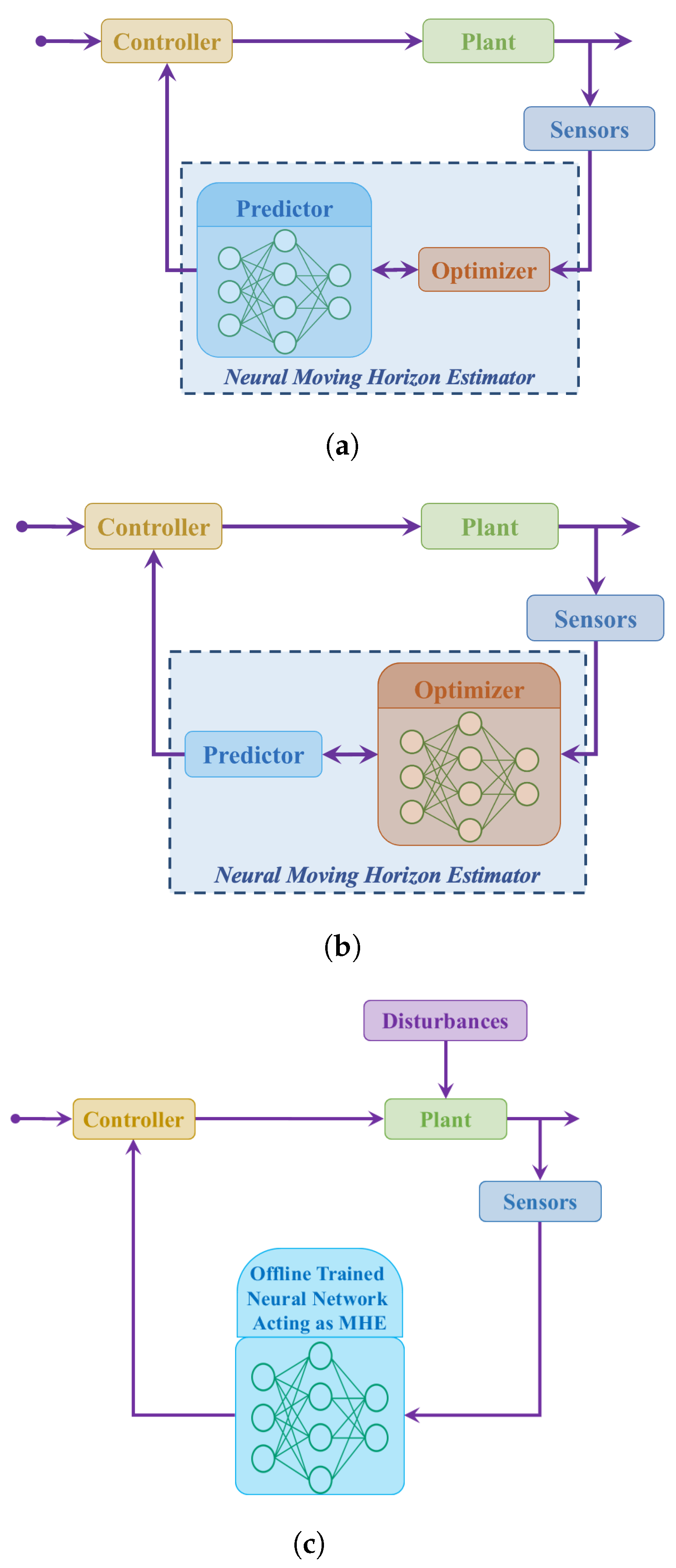
5. Different NMHE Approaches
- The first group adopts the standard MHE formulation (3) but leverages NNs to create a more accurate model of the system, thereby enhancing state estimation accuracy.
- The second group employs NNs to modify the cost function (2), providing auto-tuning capabilities that make the estimator adaptive to varying conditions.
- The third group uses NNs to approximate the standard MHE and implements the NN in place of the MHE for state estimation. This approach eliminates the need to solve the nonlinear constrained optimization problem inherent in MHE, leading to significant speedups, though it results in slightly lower state estimation accuracy since the NN is an approximation of the MHE.
5.1. Category I: Using NNs for More Accurate Models
5.2. Category II: Using NNs to Modify the Cost Function
5.3. Category III: Using NNs for Approximating Regular MHE
6. NN Architectures Used in NMHE
6.1. Category I: Using NNs for More Accurate Models
- MLP networks have simple yet effective structures. Among the studies that have employed MLP networks, one hidden layer seems to be sufficient for most cases. The number of neurons depends on the system’s complexity, ranging from 3 neurons for a simple system like HVAC to 30 neurons for a complex network process. Additional estimation tasks, such as identifying the type of cyberattacks, appear to require more hidden layers.
- LSTM networks, capable of capturing temporal dependencies, excel in dynamical system modeling. However, there were only two studies that employed LSTM, featuring a much more complex structure compared to the aforementioned MLP networks. Unfortunately, there is no direct comparison of LSTM and MLP networks in the context of NMHE, making it difficult to draw definitive conclusions. However, given the known advantages of LSTM networks and the outstanding state estimation results obtained with them in [35], LSTMs are worth considering, especially for high-performance applications.
- The results obtained with fuzzy networks are noteworthy. Compared to MLP networks, the design of fuzzy networks is a more involved process as they require a degree of domain knowledge to set up the membership functions and the rule base. However, this initial setup has the potential to reduce the amount of time required for training. Considering that MLP training reached up to 10,000 epochs in the aforementioned studies, the potential of fuzzy networks to reduce training times makes them an attractive option.
6.2. Category II: Using NNs to Modify the Cost Function
- If an NN is used to approximate the entire cost function, the use of networks that guarantee convexity, e.g., ICNN, is desired.
- In the NeuroMHE setup, where an NN is used to approximate the weighing matrices, MLP networks are effective; however, the use of a trust-region optimization algorithm helps simplify the network structure while offering higher state estimation accuracy.
6.3. Category III: Using NNs for Approximating Regular MHE
- The MLP networks used in this category are considerably larger than the ones used in the previous categories, as the NN represents the entire state estimator, including the system model, and the optimizer. In the previous categories, the NN represented only the system model or a portion of the optimizer.
7. NMHE Running Time
8. Future Directions
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Summary of Existing NMHE Studies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Objective | Case Study |
|---|---|---|
| [21] | To use NNs as the predictor in MHE formulation, leveraging NNs for better state estimation accuracy | Free moving point-mass object |
| [36] | To estimate external force/torque information and disturbance rejection using NMHE | Bilateral teleoperation of robotic manipulators |
| [37] | To leverage NMHE for enhanced state estimation in different applications | State estimation for an inverted pendulum using partial measurements, localization for a ground robot, and state estimation for a quadrotor |
| [35] | To enhance the accuracy of car sideslip angle estimation using NMHE | Car chassis control |
| [38] | To leverage NMHE for high-performance state estimation | Autonomous racing of cars |
| [39] | Identify battery parameters and estimate SOC with high precision | Lithium-ion batteries |
| [40] | Estimate HVAC systems’ state variables using only building management system data | Building HVAC control for occupant comfort satisfaction and energy savings |
| [41] | For online estimation of pedestrian position, velocity, and acceleration | Pedestrian localization for car autonomous navigation |
| [42] | To remove motion artifacts from electrocardiogram signals | Electrocardiogram signal processing |
| [43] | Estimate state variables using basic measurements for process monitoring, eliminating the need for expensive sensors | Online monitoring of brewery wastewater anaerobic digester |
| [44] | Reduce modeling errors in gray-box system identification | 2-DOF robotic manipulator |
| [45] | Overcome the low accuracy of traditional tire models, enabling high-fidelity fault identification | Fault detection and diagnosis of car tires |
| [46] | Detect cyberattacks in complex process networks | The integrated process of benzene alkylation with ethylene to produce ethylbenzene |
| [58] | Identify terrain parameters using low-cost sensors | Mobile robot |
| [47] | Enable accurate state estimation in the absence of reliable system models | Climate control of smart building |
| [48] | Develop an auto-tuning state estimator for varying conditions | Quadrotor disturbance estimation |
| [49] | Develop an auto-tuning state estimator for varying conditions | Quadrotor disturbance estimation |
| [50] | Use trust-region policy optimization for an adaptable state estimator | Quadrotor disturbance estimation |
| [51] | Approximate MHE with NNs for fast state estimation | Inverted pendulum |
| [52] | Approximate MHE with NNs for fast state estimation, integrating it with MPC | Industrial batch polymerization reactor |
| [53] | Approximate MHE with NNs for fast state estimation | Inverted pendulum |
| [54] | Approximate MHE with NNs for fast state estimation | SOC estimation of lithium-ion batteries |
References
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Khodarahmi, M.; Maihami, V. A review on Kalman filter models. Arch. Comput. Methods Eng. 2023, 30, 727–747. [Google Scholar] [CrossRef]
- Doucet, A.; Johansen, A.M. A tutorial on particle filtering and smoothing: Fifteen years later. Handb. Nonlinear Filter. 2009, 12, 3. [Google Scholar]
- Rawlings, J.B.; Allan, D.A. Moving Horizon Estimation. In Encyclopedia of Systems and Control; Springer: Cham, Switzerland, 2021; pp. 1352–1358. [Google Scholar] [CrossRef]
- Jin, X.B.; Robert Jeremiah, R.J.; Su, T.L.; Bai, Y.T.; Kong, J.L. The New Trend of State Estimation: From Model-Driven to Hybrid-Driven Methods. Sensors 2021, 21, 2085. [Google Scholar] [CrossRef] [PubMed]
- Feng, S.; Li, X.; Zhang, S.; Jian, Z.; Duan, H.; Wang, Z. A review: State estimation based on hybrid models of Kalman filter and neural network. Syst. Sci. Control Eng. 2023, 11, 2173682. [Google Scholar] [CrossRef]
- Bai, Y.; Yan, B.; Zhou, C.; Su, T.; Jin, X. State of art on state estimation: Kalman filter driven by machine learning. Annu. Rev. Control 2023, 56, 100909. [Google Scholar] [CrossRef]
- Rawlings, J. Moving Horizon Estimation; Springer: London, UK, 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Schwenzer, M.; Ay, M.; Bergs, T.; Abel, D. Review on Model Predictive Control: An Engineering Perspective. Int. J. Adv. Manuf. Technol. 2021, 117, 1327–1349. [Google Scholar] [CrossRef]
- Anderson, B.D.; Moore, J.B. Optimal Control: Linear Quadratic Methods; Courier Corporation: North Chelmsford, MA, USA, 2007. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Rao, C.V.; Rawlings, J.B.; Mayne, D.Q. Constrained state estimation for nonlinear discrete-time systems: Stability and moving horizon approximations. IEEE Trans. Autom. Control 2003, 48, 246–258. [Google Scholar] [CrossRef]
- Richalet, J.; Rault, A.; Testud, J.; Papon, J. Model predictive heuristic control. Autom. (J. IFAC) 1978, 14, 413–428. [Google Scholar] [CrossRef]
- Fagiano, L.; Novara, C. A combined Moving Horizon and Direct Virtual Sensor approach for constrained nonlinear estimation. Automatica 2013, 49, 193–199. [Google Scholar] [CrossRef]
- Wan, Y.; Keviczky, T. Real-Time Fault-Tolerant Moving Horizon Air Data Estimation for the Reconfigure Benchmark. IEEE Trans. Control Syst. Technol. 2018, 27, 997–1011. [Google Scholar] [CrossRef]
- Tenny, M.J.; Rawlings, J.B. Efficient Moving Horizon Estimation and Nonlinear Model Predictive Control. In Proceedings of the 2002 American Control Conference, Anchorage, AK, USA, 8–10 May 2002; Volume 6, pp. 4475–4480. [Google Scholar] [CrossRef]
- Bae, H.; Oh, J.H. Humanoid State Estimation Using a Moving Horizon Estimator. Adv. Robot. 2017, 31, 695–705. [Google Scholar] [CrossRef]
- Zanon, M.; Frasch, J.V.; Diehl, M. Nonlinear Moving Horizon Estimation for Combined State and Friction Coefficient Estimation in Autonomous Driving. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 4130–4135. [Google Scholar] [CrossRef]
- Vandersteen, J.; Diehl, M.; Aerts, C.; Swevers, J. Spacecraft Attitude Estimation and Sensor Calibration Using Moving Horizon Estimation. J. Guid. Control Dyn. 2013, 36, 734–742. [Google Scholar] [CrossRef]
- Kraus, T.; Ferreau, H.J.; Kayacan, E.; Ramon, H.; De Baerdemaeker, J.; Diehl, M.; Saeys, W. Moving Horizon Estimation and Nonlinear Model Predictive Control for Autonomous Agricultural Vehicles. Comput. Electron. Agric. 2013, 98, 25–33. [Google Scholar] [CrossRef]
- Alessandri, A.; Baglietto, M.; Battistelli, G.; Gaggero, M. Moving-horizon state estimation for nonlinear systems using neural networks. IEEE Trans. Neural Netw. 2011, 22, 768–780. [Google Scholar] [CrossRef]
- Nidhil Wilfred, K.J.; Sreeraj, S.; Vijay, B.; Bagyaveereswaran, V. System identification using artificial neural network. In Proceedings of the 2015 International Conference on Circuits, Power and Computing Technologies [ICCPCT-2015], Nagercoil, India, 19–20 March 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Ecker, L.; Schöberl, M. Data-driven observer design for an inertia wheel pendulum with static friction. IFAC-PapersOnLine 2022, 55, 193–198. [Google Scholar] [CrossRef]
- Choo, W.; Kayacan, E. Data-Based MHE for Agile Quadrotor Flight. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 4307–4314. [Google Scholar]
- Bishop, C.M.; Nasrabadi, N.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006; Volume 4. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A.; Bengio, Y. Deep Learning; MIT Press: Cambridge, UK, 2016; Volume 1. [Google Scholar]
- Zhang, C.; Bengio, S.; Hardt, M.; Recht, B.; Vinyals, O. Understanding deep learning requires rethinking generalization. arXiv 2016, arXiv:1611.03530. [Google Scholar] [CrossRef]
- Bejani, M.M.; Ghatee, M. A systematic review on overfitting control in shallow and deep neural networks. Artif. Intell. Rev. 2021, 54, 6391–6438. [Google Scholar] [CrossRef]
- Verschueren, R.; Frison, G.; Kouzoupis, D.; Frey, J.; Duijkeren, N.v.; Zanelli, A.; Novoselnik, B.; Albin, T.; Quirynen, R.; Diehl, M. acados—A modular open-source framework for fast embedded optimal control. Math. Program. Comput. 2022, 14, 147–183. [Google Scholar] [CrossRef]
- Chen, R.T.; Rubanova, Y.; Bettencourt, J.; Duvenaud, D.K. Neural ordinary differential equations. Adv. Neural Inf. Process. Syst. 2018, 31. Available online: https://proceedings.neurips.cc/paper_files/paper/2018/file/69386f6bb1dfed68692a24c8686939b9-Paper.pdf (accessed on 24 March 2025).
- Marino, R.; Buffoni, L.; Chicchi, L.; Giambagli, L.; Fanelli, D. Stable attractors for neural networks classification via ordinary differential equations (SA-nODE). Mach. Learn. Sci. Technol. 2024, 5, 035087. [Google Scholar] [CrossRef]
- Alessandri, A.; Baglietto, M.; Battistelli, G.; Zavala, V. Advances in Moving Horizon Estimation for Nonlinear Systems. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 5681–5688. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. Syst. Rev. 2021, 10, 89. [Google Scholar] [CrossRef] [PubMed]
- Song, R.; Fang, Y.; Huang, H. Reliable estimation of automotive states based on optimized neural networks and moving horizon estimator. IEEE/ASME Trans. Mechatron. 2023, 28, 3238–3249. [Google Scholar] [CrossRef]
- Sun, D.; Liao, Q.; Stoyanov, T.; Kiselev, A.; Loutfi, A. Bilateral telerobotic system using type-2 fuzzy neural network based moving horizon estimation force observer for enhancement of environmental force compliance and human perception. Automatica 2019, 106, 358–373. [Google Scholar] [CrossRef]
- Chee, K.Y.; Hsieh, M.A. LEARNEST: LEARNing Enhanced Model-based State ESTimation for Robots using Knowledge-based Neural Ordinary Differential Equations. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 11590–11596. [Google Scholar]
- Alcala, E.; Sename, O.; Puig, V.; Quevedo, J. TS-MPC for autonomous vehicle using a learning approach. IFAC-PapersOnLine 2020, 53, 15110–15115. [Google Scholar] [CrossRef]
- Chen, Y.; Li, C.; Chen, S.; Ren, H.; Gao, Z. A combined robust approach based on auto-regressive long short-term memory network and moving horizon estimation for state-of-charge estimation of lithium-ion batteries. Int. J. Energy Res. 2021, 45, 12838–12853. [Google Scholar] [CrossRef]
- Mostafavi, S.; Doddi, H.; Kalyanam, K.; Schwartz, D. Nonlinear moving horizon estimation and model predictive control for buildings with unknown HVAC dynamics. IFAC-PapersOnLine 2022, 55, 71–76. [Google Scholar] [CrossRef]
- Mohammadbagher, E.; Bhatt, N.P.; Hashemi, E.; Fidan, B.; Khajepour, A. Real-time pedestrian localization and state estimation using moving horizon estimation. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–7. [Google Scholar]
- Banerjee, S.; Singh, G.K. A New Moving Horizon Estimation Based Real-Time Motion Artifact Removal from Wavelet Subbands of ECG Signal Using Particle Filter. J. Signal Process. Syst. 2023, 95, 1021–1035. [Google Scholar] [CrossRef]
- Dewasme, L. Neural network-based software sensors for the estimation of key components in brewery wastewater anaerobic digester: An experimental validation. Water Sci. Technol. 2019, 80, 1975–1985. [Google Scholar] [CrossRef]
- Løwenstein, K.F.; Bernardini, D.; Fagiano, L.; Bemporad, A. Physics-informed online learning of gray-box models by moving horizon estimation. Eur. J. Control 2023, 74, 100861. [Google Scholar] [CrossRef]
- Zhang, B.; Lu, S.; Xie, W.; Xie, F. Fault Detection and Diagnosis Based on Interactive Multi-Model Moving Horizon Estimation and Neuro-Tire Model. IEEE/ASME Trans. Mechatron. 2024, 29, 3614–3625. [Google Scholar] [CrossRef]
- Sundberg, B.; Pourkargar, D.B. Cyberattack awareness and resiliency of integrated moving horizon estimation and model predictive control of complex process networks. In Proceedings of the 2023 American Control Conference (ACC), San Diego, CA, USA, 31 May–2 June 2023; pp. 3815–3820. [Google Scholar]
- Esfahani, H.N.; Kordabad, A.B.; Cai, W.; Gros, S. Learning-based state estimation and control using MHE and MPC schemes with imperfect models. Eur. J. Control 2023, 73, 100880. [Google Scholar] [CrossRef]
- Wang, B.; Ma, Z.; Lai, S.; Zhao, L.; Lee, T.H. Differentiable moving horizon estimation for robust flight control. In Proceedings of the 2021 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 14–17 December 2021; pp. 3563–3568. [Google Scholar]
- Wang, B.; Ma, Z.; Lai, S.; Zhao, L. Neural moving horizon estimation for robust flight control. IEEE Trans. Robot. 2023, 40, 639–659. [Google Scholar] [CrossRef]
- Wang, B.; Chen, X.; Zhao, L. Trust-Region Neural Moving Horizon Estimation for Robots. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 2059–2065. [Google Scholar] [CrossRef]
- Brunello, R.K.V. Nonlinear Moving-Horizon State Estimation for Hardware Implementation and a Model Predictive Control Application. Master’s Thesis, Universidade de Brasília, Brasília, Brazil, 2021. [Google Scholar]
- Karg, B.; Lucia, S. Approximate moving horizon estimation and robust nonlinear model predictive control via deep learning. Comput. Chem. Eng. 2021, 148, 107266. [Google Scholar] [CrossRef]
- Brunello, R.K.V.; Sampaio, R.C.; Llanos, C.H.; dos Santos Coelho, L.; Ayala, H.V.H. Efficient Hardware Implementation of Nonlinear Moving-horizon State Estimation with Artificial Neural Networks. IFAC-PapersOnLine 2020, 53, 7813–7818. [Google Scholar] [CrossRef]
- Lopes, E.D.R.; Soudre, M.M.; Llanos, C.H.; Ayala, H.V.H. Nonlinear receding-horizon filter approximation with neural networks for fast state of charge estimation of lithium-ion batteries. J. Energy Storage 2023, 68, 107677. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Nech, A.; Kemelmacher-Shlizerman, I. Level playing field for million scale face recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7044–7053. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 5998–6008. [Google Scholar]
- Kayacan, E.; Zhang, Z.Z.; Chowdhary, G. Embedded High Precision Control and Corn Stand Counting Algorithms for an Ultra-Compact 3D Printed Field Robot. In Proceedings of the Robotics: Science and Systems, Pittsburgh, PA, USA, 26–30 June 2018; Volume 14, p. 9. [Google Scholar]
| Search Terms Include Controlled and Uncontrolled Terms |
|---|
| Controlled Terms: Neural Networks, Artificial Neural Networks, Moving Horizon Estimator, MHE |
| Uncontrolled Terms: Deep Networks, Receding Horizon, NN Estimation, Deep Neural Networks |
| Reference | Application Area | Running Time | Horizon Length | Computing Hardware |
|---|---|---|---|---|
| [21] | Quadrotors | 1.66 [ms] | 4 | Intel Xeon |
| [38] | Self-driving car | 4.8 [ms] | 6 | Intel Core i7-8550U |
| [41] | Pedestrian localization | 55 [ms] | - | Intel Core i7-9750 |
| [42] | Electrocardiogram | 801 [s] | 5 | Raspberry Pi |
| [43] | SOC estimation of lithium-ion batteries | 0.08 [s] | 20 | Intel Core i7 |
| [45] | Fault detection and diagnosis for car tire | 11.28 [s] | 10 | Intel Core i5-8400 |
| [48] | Quadrotors | 5.6 [ms] | 20 | AMD Ryzen 9 5950X |
| [49] | Quadrotors | 1.83 [ms] | 10 | Intel Core i7-11700K |
| [50] | Quadrotors | 1.83 [ms] | 10 | Intel Core i7-11700K |
| [51] | Inverted pendulum | 1.60 [s] | 20 | FPGA |
| [52] | Industrial batch polymerization reactor | 191 [ms] | 20 | ARM Cortex-M0+ |
| [53] | Inverted pendulum | 1.60 [s] | 9 | FPGA |
| [54] | SOC estimation of lithium-ion batteries | 0.1146 [ms] | 20 | Nvidia Jetson Nano |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mobeen, S.; Cristobal, J.; Singoji, S.; Rassas, B.; Izadi, M.; Shayan, Z.; Yazdanshenas, A.; Sohi, H.K.; Barnsley, R.; Elliott, L.; et al. Neural Moving Horizon Estimation: A Systematic Literature Review. Electronics 2025, 14, 1954. https://doi.org/10.3390/electronics14101954
Mobeen S, Cristobal J, Singoji S, Rassas B, Izadi M, Shayan Z, Yazdanshenas A, Sohi HK, Barnsley R, Elliott L, et al. Neural Moving Horizon Estimation: A Systematic Literature Review. Electronics. 2025; 14(10):1954. https://doi.org/10.3390/electronics14101954
Chicago/Turabian StyleMobeen, Surrayya, Jann Cristobal, Shashank Singoji, Basaam Rassas, Mohammadreza Izadi, Zeinab Shayan, Amin Yazdanshenas, Harneet Kaur Sohi, Robert Barnsley, Lana Elliott, and et al. 2025. "Neural Moving Horizon Estimation: A Systematic Literature Review" Electronics 14, no. 10: 1954. https://doi.org/10.3390/electronics14101954
APA StyleMobeen, S., Cristobal, J., Singoji, S., Rassas, B., Izadi, M., Shayan, Z., Yazdanshenas, A., Sohi, H. K., Barnsley, R., Elliott, L., & Faieghi, R. (2025). Neural Moving Horizon Estimation: A Systematic Literature Review. Electronics, 14(10), 1954. https://doi.org/10.3390/electronics14101954