
Time-of-Arrival and Angle-of-Arrival Measurement-Assisted 3D Inter-Unmanned Aerial Vehicle Relative Localization Under Distance-Dependent Noise Model



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- The CRLB under a distance-dependent noise model for UAV relative pose estimation is derived, providing a theoretical benchmark for the achievable accuracy of TOA-AOA measurements.
- A novel joint TOA-AOA formulation for relative pose estimation is developed, combining distance and angle measurements to enhance localization accuracy in anchor-free environments.
- An efficient SDR estimator is devised to handle the nonlinearity and orthogonality constraints, and its effectiveness is demonstrated through comprehensive simulations under various noise and trajectory conditions.
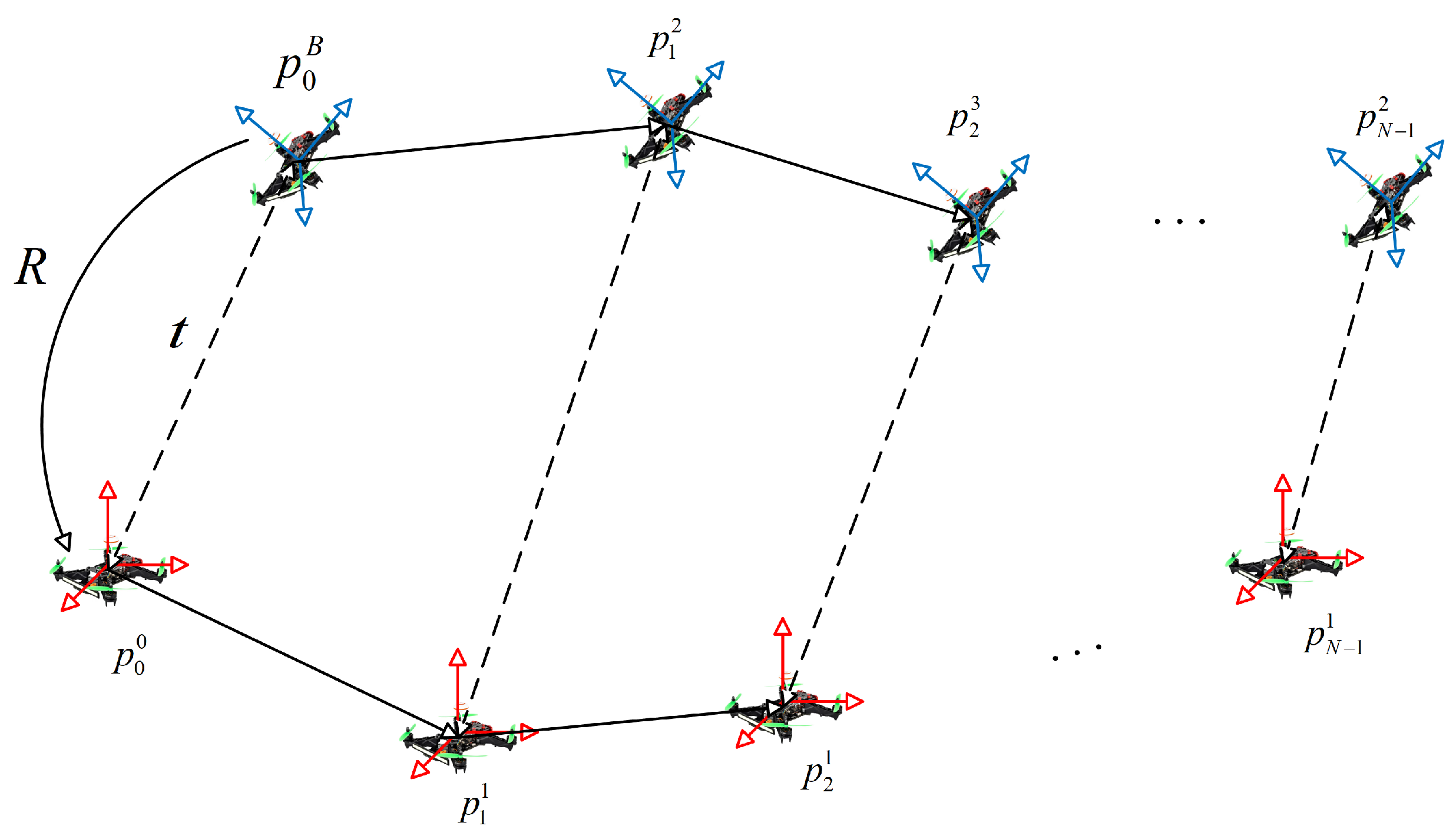
2. Problem Formulation
System Model
3. SDR Method for Relative Localization
3.1. SDR Method Using TOA Only
| Algorithm 1 SDR-TOA. |
| Data: range measurement vector , UAV speed vector , UAV initial positions and , noise related parameters and Result: relative pose estimation and 1: Compute and using (17) and (18) respectively; 2: Initialize ; 3: Compute using (26); 4: Construct constraints equations using (25); 5: Solve by optimizing (27); 6: Extract and from ; 7: Compute using (29) and (30); 8: Update using (22); 9: Solve by optimizing (27) with updated ; 10: Repeat 6–7; |
3.2. SDR Method Using TOA and AOA Measurements
| Algorithm 2 SDR-TOA-AOA. |
| Data: range measurement vector , angular measurement vector , UAV speed vector , UAV initial positions and , noise related parameters and Result: relative pose estimation and 1: Compute and using (35) and (36) respectively; 2: Initialize ; 3: Compute using (39); 4:bConstruct constraints equations using (25); 5: Solve by optimizing (27); 6: Extract and from ; 7: Compute using (29) and (30); 8: Update using (37); 9: Solve by optimizing (41) with updated ; 10: Repeat 6–7; |
4. Performance Analysis
4.1. CRLB Analysis for TOA Measurements Only
4.2. CRLB Analysis for TOA-AOA Measurements
5. Numerical Experiments
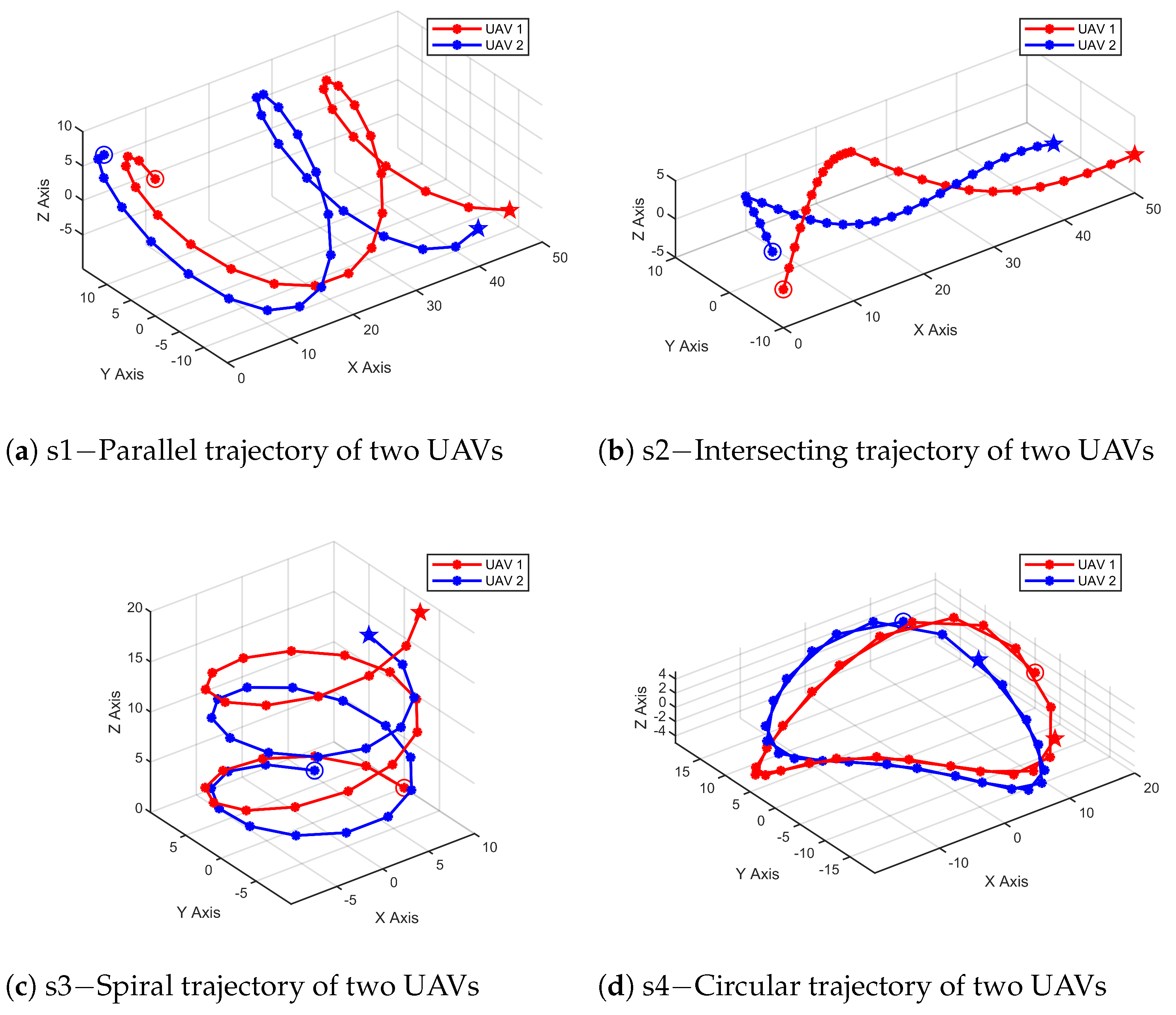
5.1. Simulation Configuration
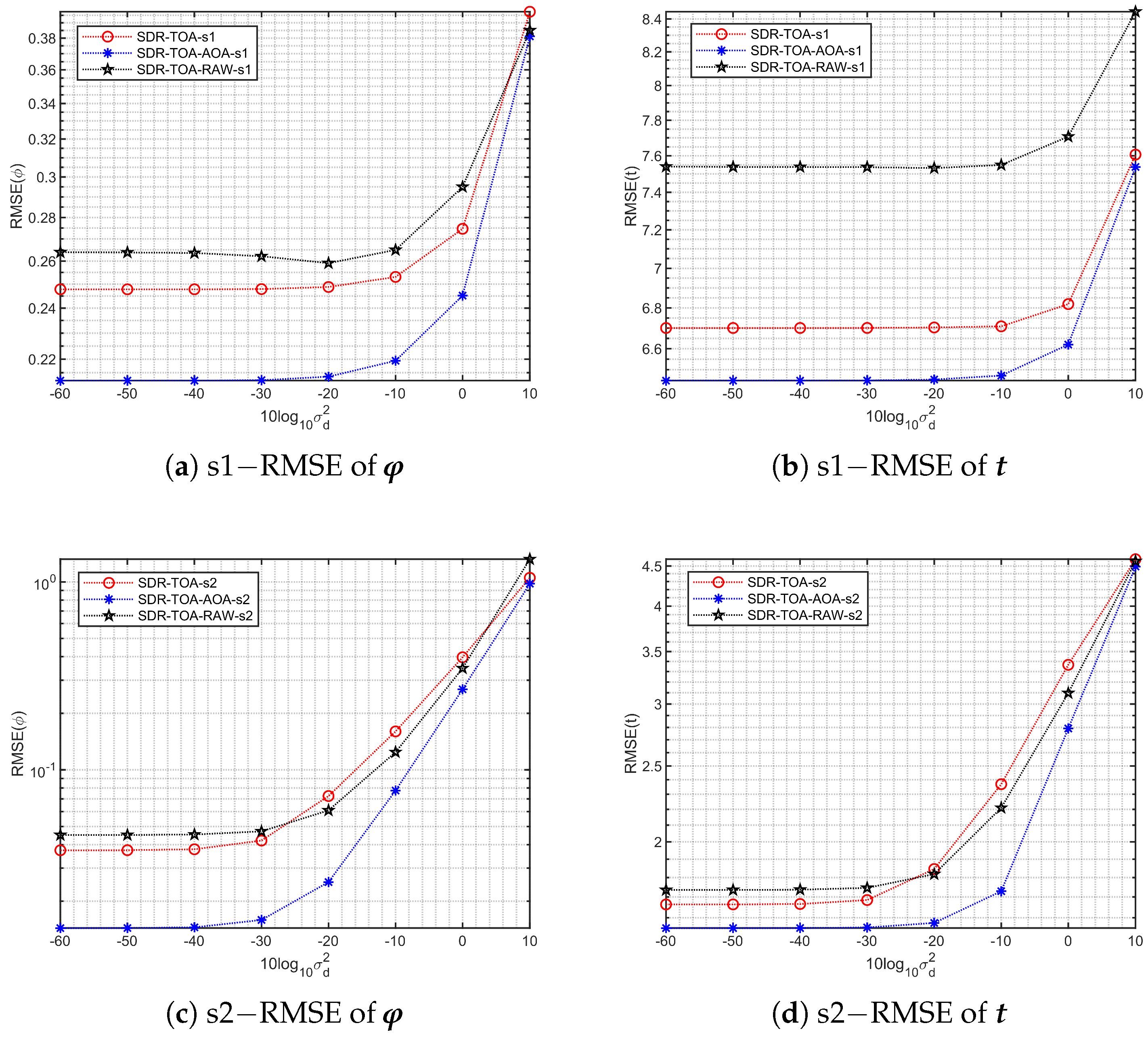
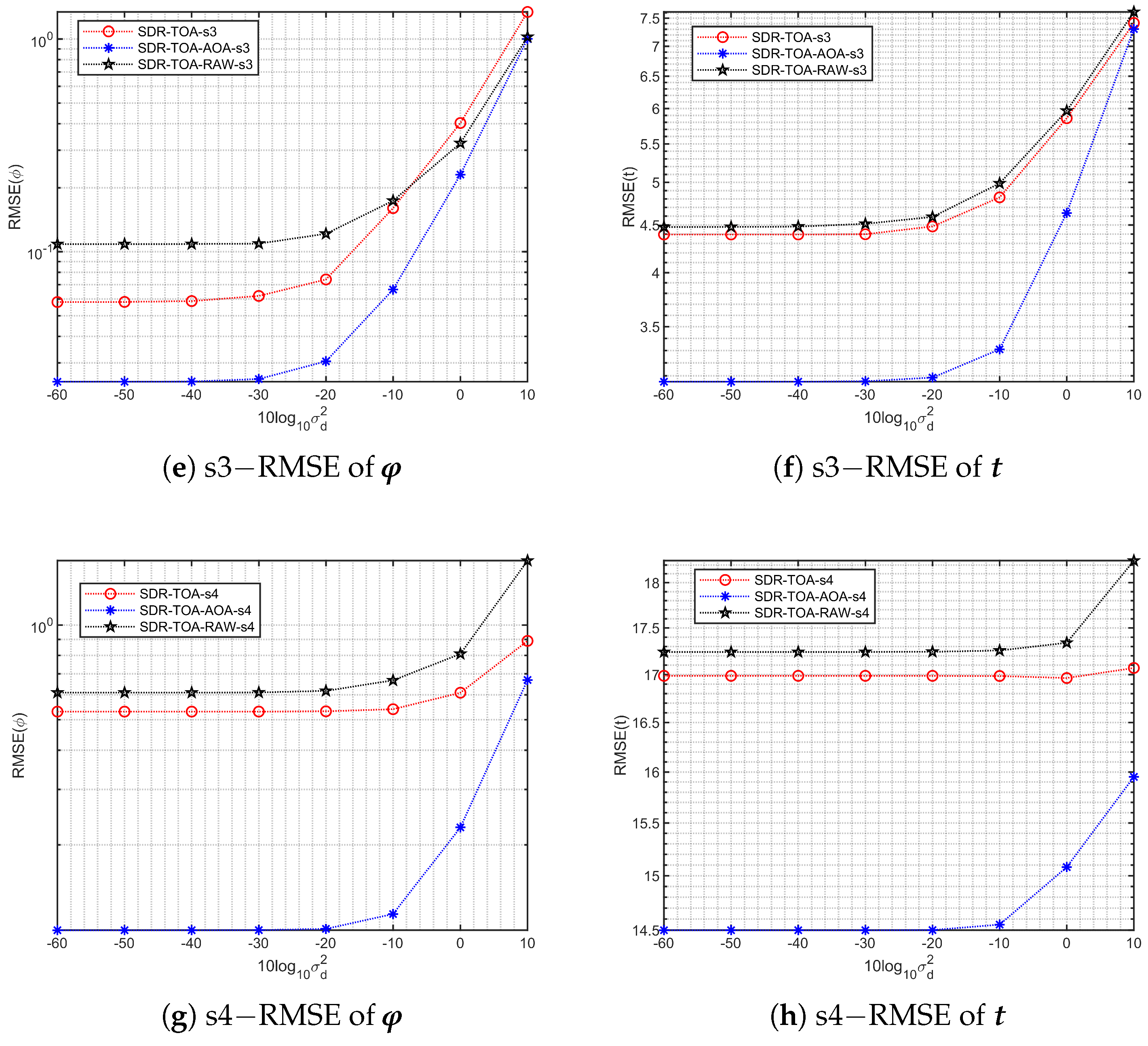
5.2. Performance Comparison of Measurement Noise Variance
5.3. Performance Comparison of TOA and AOA Measurement Noise Ratio
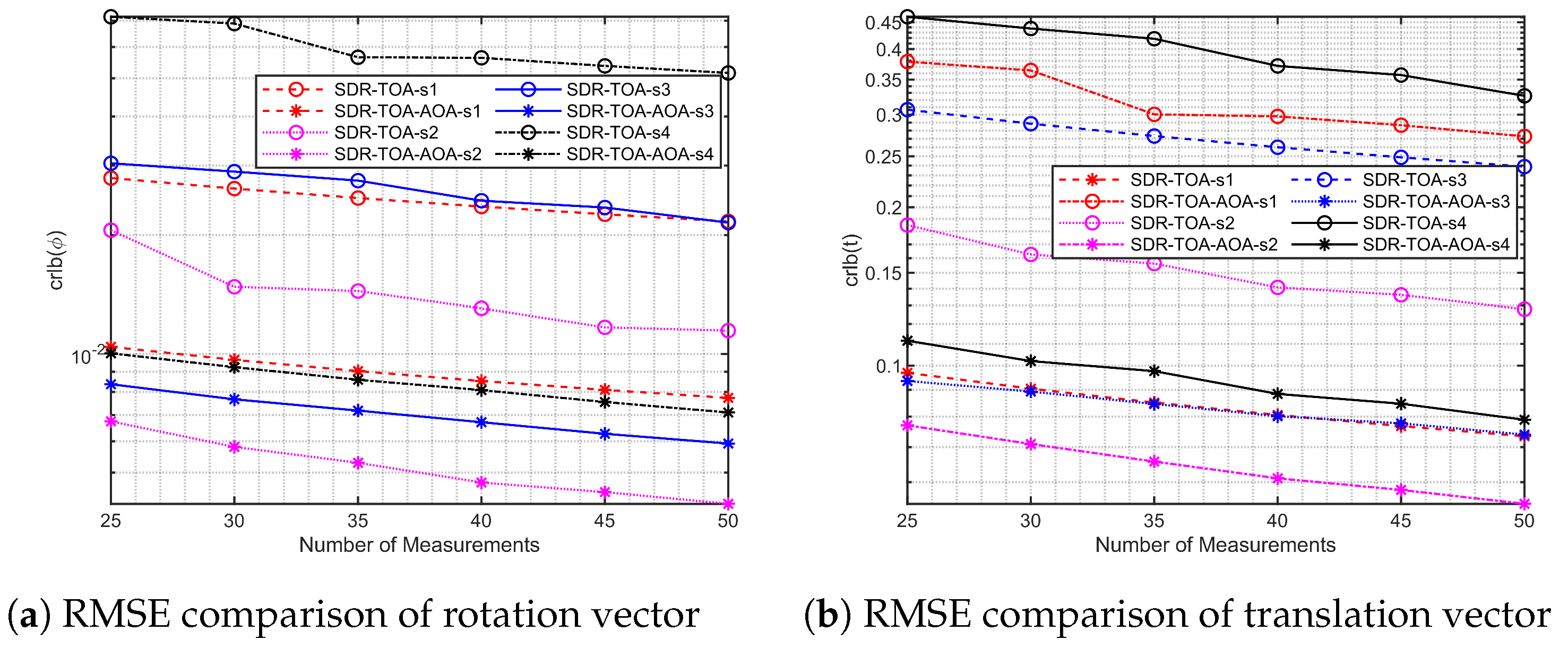
5.4. Performance Comparison of Number of Measurements
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ye, X.; Song, F.; Zhang, Z.; Zeng, Q. A Review of Small UAV Navigation System Based on Multisource Sensor Fusion. IEEE Sens. J. 2023, 23, 18926–18948. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Y.; Bai, X.; Li, D. Communication Efficient, Distributed Relative State Estimation in UAV Networks. IEEE J. Sel. Areas Commun. 2023, 41, 1151–1166. [Google Scholar] [CrossRef]
- Pan, J.; Ye, N.; Yu, H.; Hong, T.; Al-Rubaye, S.; Mumtaz, S.; Al-Dulaimi, A.; Chih-Lin, I. AI-Driven Blind Signature Classification for IoT Connectivity: A Deep Learning Approach. IEEE Trans. Wirel. Commun. 2022, 21, 6033–6047. [Google Scholar] [CrossRef]
- Chen, R.; Yang, B.; Zhang, W. Distributed and collaborative localization for swarming UAVs. IEEE Internet Things J. 2020, 8, 5062–5074. [Google Scholar] [CrossRef]
- Ding, X.; Zhou, K.; Li, G.; Yang, K.; Gao, X.; Yuan, J.; An, J. Customized Joint Blind Frame Synchronization and Decoding Methods for Analog LDPC Decoder. IEEE Trans. Commun. 2024, 72, 756–770. [Google Scholar] [CrossRef]
- Ding, X.; Zhang, Y.; Li, J.; Mao, B.; Guo, Y.; Li, G. A feasibility study of multi-mode intelligent fusion medical data transmission technology of industrial Internet of Things combined with medical Internet of Things. Internet Things 2023, 21, 100689. [Google Scholar] [CrossRef]
- Gu, X.; Zheng, C.; Li, Z.; Zhou, G.; Zhou, H.; Zhao, L. Cooperative Localization for UAV Systems From the Perspective of Physical Clock Synchronization. IEEE J. Sel. Areas Commun. 2024, 42, 21–33. [Google Scholar] [CrossRef]
- Hua, B.; Ni, H.; Zhu, Q.; Wang, C.X.; Zhou, T.; Mao, K.; Bao, J.; Zhang, X. Channel Modeling for UAV-to-Ground Communications with Posture Variation and Fuselage Scattering Effect. IEEE Trans. Commun. 2023, 71, 3103–3116. [Google Scholar] [CrossRef]
- Shi, M.; Yang, K.; Niyato, D.; Yuan, H.; Zhou, H.; Xu, Z. The Meta Distribution of SINR in UAV-Assisted Cellular Networks. IEEE Trans. Commun. 2023, 71, 1193–1206. [Google Scholar] [CrossRef]
- You, K.; Chen, Q.; Xie, P.; Song, S. Range-based coordinate alignment for cooperative mobile sensor network localization. IEEE Trans. Control Netw. Syst. 2020, 7, 1379–1390. [Google Scholar] [CrossRef]
- Wu, X.; Qi, H. Motion Parameter Estimation for Mobile Sources Using Semidefinite Programming. IEEE Trans. Mob. Comput. 2023, 22, 1066–1080. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, L.; Chen, X.; Wang, W. A Low-Complexity Soft Localization Algorithm Based on Expectation Propagation. IEEE Commun. Lett. 2023, 27, 2958–2962. [Google Scholar] [CrossRef]
- Li, X.; Wu, Z.; Shen, Z.; Xu, Z.; Li, X.; Li, S.; Han, J. An Indoor and Outdoor Seamless Positioning System for Low-Cost UGV Using PPP/INS/UWB Tightly Coupled Integration. IEEE Sens. J. 2023, 23, 24895–24906. [Google Scholar] [CrossRef]
- Cao, C.; Zhu, Y.; Zhao, L.; Sun, D.; Liu, Z.; Lian, Y. An Accurate Positioning Method Based on Time-Division Strategy for Indoor Moving Target. IEEE Trans. Instrum. Meas. 2023, 72, 1–12. [Google Scholar] [CrossRef]
- Singh, A.; Verma, S. Graph Laplacian Regularization with Procrustes Analysis for Sensor Node Localization. IEEE Sens. J. 2017, 17, 5367–5376. [Google Scholar] [CrossRef]
- Fan, T.; Murphey, T.D. Majorization Minimization Methods for Distributed Pose Graph Optimization. IEEE Trans. Robot. 2024, 40, 22–42. [Google Scholar] [CrossRef]
- Chepuri, S.P.; Leus, G.; van der Veen, A.J. Rigid body localization using sensor networks. IEEE Trans. Signal Process. 2014, 62, 4911–4924. [Google Scholar] [CrossRef]
- Wu, X.; Lin, Q.; Qi, H. Cooperative multiple rigid body localization via semidefinite relaxation using range measurements. IEEE Trans. Signal Process. 2022, 70, 4788–4803. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, G.; Chen, S.; Ho, K.; Huang, L. An investigation and solution of angle based rigid body localization. IEEE Trans. Signal Process. 2020, 68, 5457–5472. [Google Scholar] [CrossRef]
- Dong, X.; Wang, G.; Ho, K.C.; Huang, L. Rigid Body Localization in Unsynchronized Sensor Networks: Analysis and Solution. IEEE Trans. Wirel. Commun. 2024, 23, 2901–2916. [Google Scholar] [CrossRef]
- Li, B.; Wang, X. Rigid body localization and environment sensing with 5G millimeter wave MIMO. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Norman, OK, USA, 27–30 September 2021; pp. 1–5. [Google Scholar]
- Meng, X.; Li, Y.; Wu, Z.; Hong, S.; Chang, S. A semidefinite relaxation approach for mobile target localization based on TOA and Doppler frequency shift measurements. IEEE Sens. J. 2023, 23, 16051–16057. [Google Scholar] [CrossRef]
- Yu, Q.; Wang, Y.; Shen, Y.; Shi, X. Cooperative Multi-Rigid-Body Localization in Wireless Sensor Networks Using Range and Doppler Measurements. IEEE Internet Things J. 2023, 10, 22748–22763. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, M.; Xie, X.; Gao, Y.; Deng, F.; Lam, T.L. Asymptotically Efficient Estimator for Range-Based Robot Relative Localization. IEEE/ASME Trans. Mechatron. 2023, 28, 3525–3536. [Google Scholar] [CrossRef]
- Mao, K.; Zhu, Q.; Qiu, Y.; Liu, X.; Song, M.; Fan, W.; Kokkeler, A.B.J.; Miao, Y. A UAV-Aided Real-Time Channel Sounder for Highly Dynamic Nonstationary A2G Scenarios. IEEE Trans. Instrum. Meas. 2023, 72, 6504515. [Google Scholar] [CrossRef]
- Li, M.; Lam, T.L.; Sun, Z. 3-D Inter-Robot Relative Localization via Semidefinite Optimization. IEEE Robot. Autom. Lett. 2022, 7, 10081–10088. [Google Scholar] [CrossRef]
- Jiang, B.; Anderson, B.D.; Hmam, H. 3-D relative localization of mobile systems using distance-only measurements via semidefinite optimization. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 1903–1916. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Xie, L. Relative transformation estimation based on fusion of odometry and UWB ranging data. IEEE Trans. Robot. 2023, 39, 2861–2877. [Google Scholar] [CrossRef]
- Xunt, Z.; Huang, J.; Li, Z.; Ying, Z.; Wang, Y.; Xu, C.; Gao, F.; Cao, Y. CREPES: Cooperative RElative Pose Estimation System. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 5274–5281. [Google Scholar]
- Wang, Y.; Wen, X.; Yin, L.; Xu, C.; Cao, Y.; Gao, F. Certifiably Optimal Mutual Localization with Anonymous Bearing Measurements. IEEE Robot. Autom. Lett. 2022, 7, 9374–9381. [Google Scholar] [CrossRef]
- Wang, Y.; Wen, X.; Cao, Y.; Xu, C.; Gao, F. Bearing-Based Relative Localization for Robotic Swarm with Partially Mutual Observations. IEEE Robot. Autom. Lett. 2023, 8, 2142–2149. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, D.; Huo, J. Mounting Misalignment and Time Offset Self-Calibration Online Optimization Method for Vehicular Visual-Inertial-Wheel Odometer System. IEEE Trans. Instrum. Meas. 2024, 73, 1–13. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, Q.; Lin, Z.; Wu, Q.; Huang, Y.; Cai, X.; Zhong, W.; Zhao, Y. Sparse Bayesian Learning-Based 3-D Radio Environment Map Construction—Sampling Optimization, Scenario-Dependent Dictionary Construction, and Sparse Recovery. IEEE Trans. Cogn. Commun. Netw. 2024, 10, 80–93. [Google Scholar] [CrossRef]
- Gao, J.; Sha, J.; Li, H.; Wang, Y. A Robust and Fast GNSS-Inertial-LiDAR Odometry with INS-Centric Multiple Modalities by IESKF. IEEE Trans. Instrum. Meas. 2024, 73, 1–12. [Google Scholar] [CrossRef]
- Garraffa, G.; Sferlazza, A.; D’ippolito, F.; Alonge, F. Localization Based on Parallel Robots Kinematics As an Alternative to Trilateration. IEEE Trans. Ind. Electron. 2022, 69, 999–1010. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, L.; Xu, J.; Shi, J. Dynamic Feasible Region-Based IMU/UWB Fusion Method for Indoor Positioning. IEEE Sens. J. 2024, 24, 21447–21457. [Google Scholar] [CrossRef]
- Gong, Y.; Zhao, H.; Hu, K.; Lu, Q.; Shen, Y. A Multipath-Aided Localization Method for MIMO-OFDM Systems via Tensor Decomposition. IEEE Wirel. Commun. Lett. 2022, 11, 1225–1228. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, N.; Shen, Y. Beamspace Direct Localization for Large-Scale Antenna Array Systems. IEEE Trans. Signal Process. 2020, 68, 3529–3544. [Google Scholar] [CrossRef]
- Pöhlmann, R.; Zhang, S.; Staudinger, E.; Dammann, A.; Hoeher, P.A. Simultaneous Localization and Calibration for Cooperative Radio Navigation. IEEE Trans. Wirel. Commun. 2022, 21, 6195–6210. [Google Scholar] [CrossRef]
- Song, P.; Pang, F.; Lu, J. Combined AOA and TDOA Target Localization Method Under Distance-Dependent Noise Model. IEEE Sens. J. 2023, 23, 19444–19456. [Google Scholar] [CrossRef]
- Huang, B.; Xie, L.; Yang, Z. TDOA-Based Source Localization with Distance-Dependent Noises. IEEE Trans. Wirel. Commun. 2015, 14, 468–480. [Google Scholar] [CrossRef]
- Wen, X.; Wang, Y.; Zheng, X.; Wang, K.; Xu, C.; Gao, F. Simultaneous Time Synchronization and Mutual Localization for Multi-robot System. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 2603–2609. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, J.; Chang, T.; Jiang, Q.; Ding, X.; Liu, D. Time-of-Arrival and Angle-of-Arrival Measurement-Assisted 3D Inter-Unmanned Aerial Vehicle Relative Localization Under Distance-Dependent Noise Model. Electronics 2025, 14, 90. https://doi.org/10.3390/electronics14010090
Tang J, Chang T, Jiang Q, Ding X, Liu D. Time-of-Arrival and Angle-of-Arrival Measurement-Assisted 3D Inter-Unmanned Aerial Vehicle Relative Localization Under Distance-Dependent Noise Model. Electronics. 2025; 14(1):90. https://doi.org/10.3390/electronics14010090
Chicago/Turabian StyleTang, Jiawei, Tian Chang, Qinglong Jiang, Xuhui Ding, and Dekang Liu. 2025. "Time-of-Arrival and Angle-of-Arrival Measurement-Assisted 3D Inter-Unmanned Aerial Vehicle Relative Localization Under Distance-Dependent Noise Model" Electronics 14, no. 1: 90. https://doi.org/10.3390/electronics14010090
APA StyleTang, J., Chang, T., Jiang, Q., Ding, X., & Liu, D. (2025). Time-of-Arrival and Angle-of-Arrival Measurement-Assisted 3D Inter-Unmanned Aerial Vehicle Relative Localization Under Distance-Dependent Noise Model. Electronics, 14(1), 90. https://doi.org/10.3390/electronics14010090