2.1. Distributed Photovoltaic Model
In recent years, the scale of distributed photovoltaic (PV) power generation has seen significant growth, with its grid-connected capacity continuously expanding. This expansion has led to various impacts on the distribution network:
The large grid-connected capacity of distributed PV leads to voltage violations in the distribution network.
During grid faults, the disconnection of distributed PV results in power deficits, leading to a drop in system frequency. The residual dynamic voltage amplitude at distribution network nodes is low, causing a large number of users to lose power supply and affecting the quality of electricity supply.
Different control strategies of distributed PV have an impact on the voltage and frequency of the distribution network during transient processes.
Therefore, developing the distributed PV model and implementing its dynamic simulation for integration into the distribution network has become a focal point of current research. By conducting dynamic simulations of distributed PV integration, the following objectives can be achieved:
The integration of distributed PV systems into the distribution network dynamically impacts the voltage and frequency at the point of common coupling (PCC). The extent of this impact varies with the capacity and location of integration. Therefore, conducting a grid simulation of distributed PV models can assist in guiding the design of both the integration location and capacity of distributed PV systems.
Simulating and quantifying the impact of various control strategies of distributed PV on the voltage and frequency of the distribution network during transient events, and analyzing the control strategy can ensure better performance in supporting the voltage and frequency of the distribution network during fault events, thereby guiding the refinement and enhancement of distributed PV control strategies.
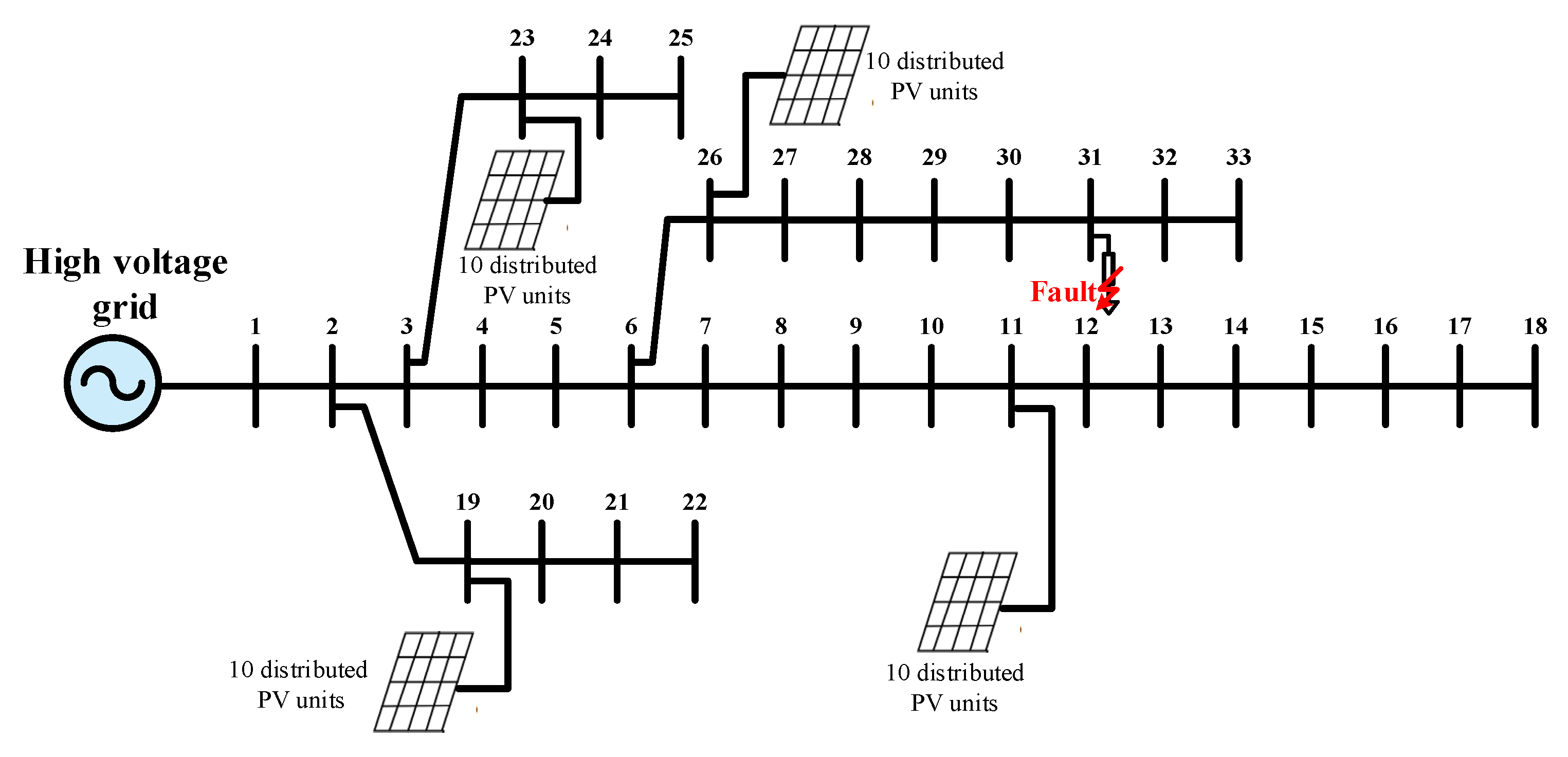
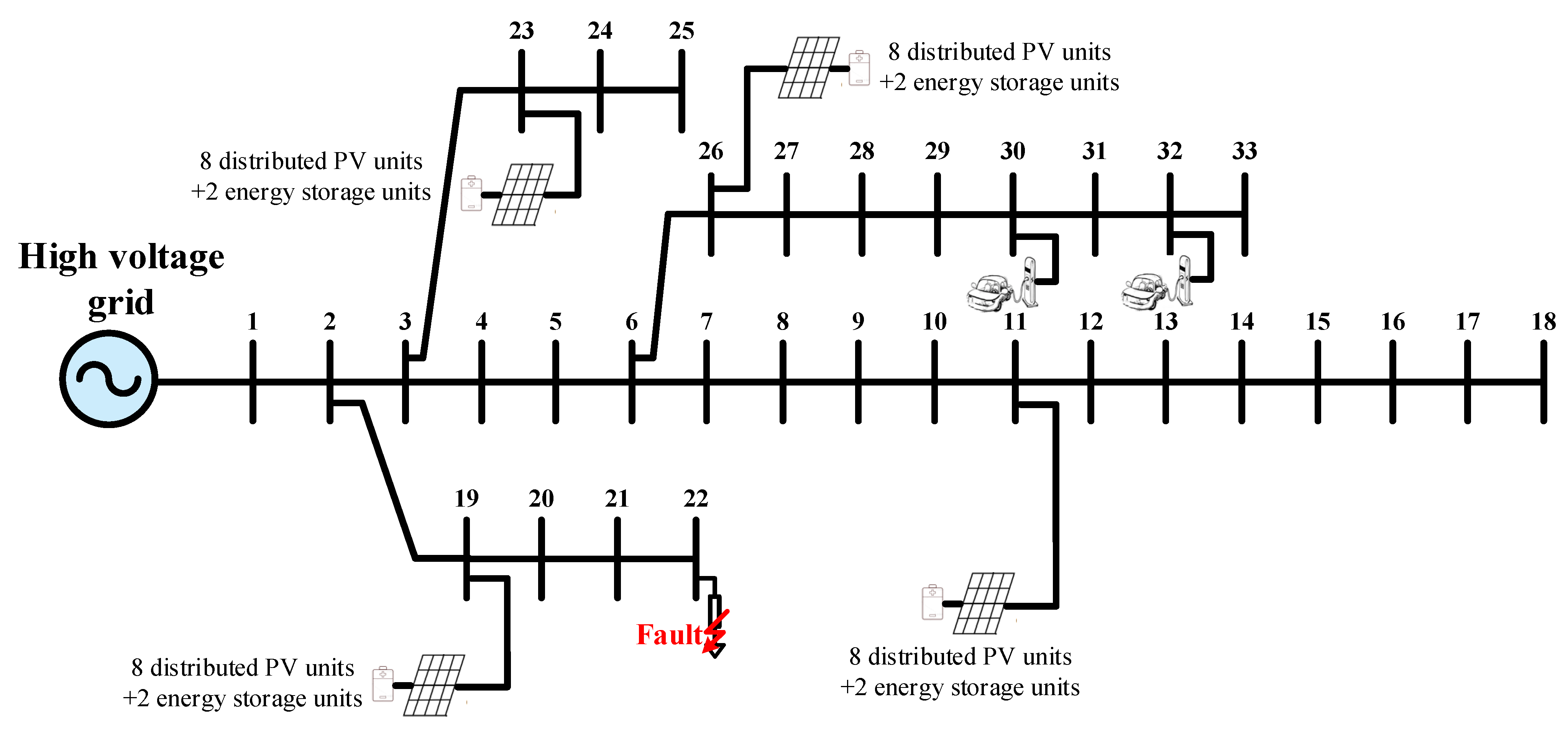
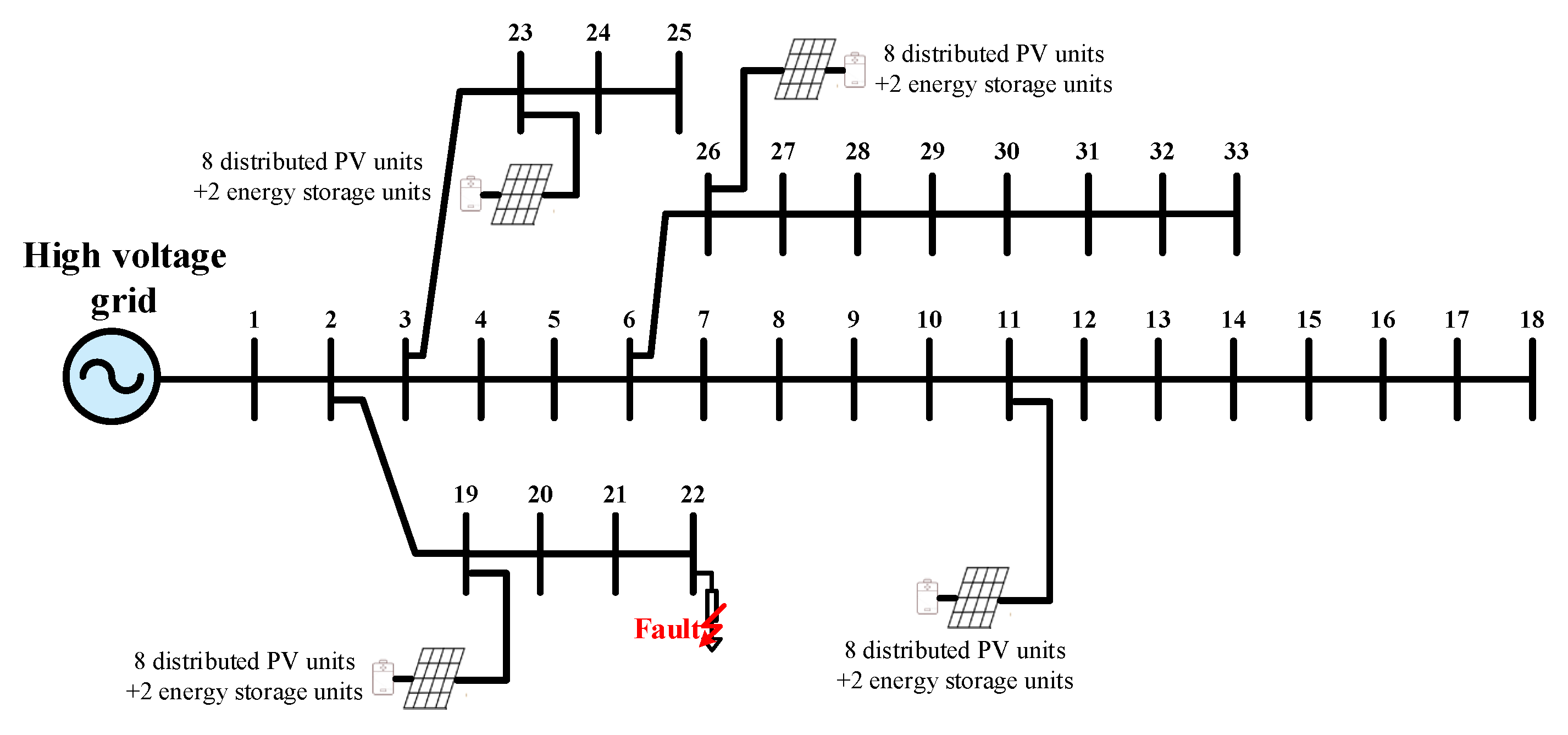
This research implements dynamic simulations of distributed PV systems in the event of faults within the distribution network, particularly focusing on scenarios where system voltage and frequency experience drops due to short-circuit faults. Through dynamic simulations, the study examines the participation of distributed PV systems in fault ride-through and fault response, monitoring the resulting changes in system voltage and frequency. It delves into extreme scenarios that test the limits of distributed PV systems’ fault ride-through capabilities, such as incidents causing the voltage at the PCC of PV to fall below 0.2 per unit (p.u.) for longer than 0.15 s. Such conditions would necessitate the disconnection of distributed PV units from the grid, diminishing power support for the distribution network and potentially worsening fault situations. Investigating these extreme fault scenarios is pivotal for enhancing the strategies for prevention and mitigation of severe faults within the distribution network, as well as for refining emergency response plans for such incidents.
To meet the demands of large-scale simulations in distribution networks, we need to explore simplified and generic modeling methods for distributed PV. These modeling methods should retain critical dynamic behavior of distributed PV, such as active power control, reactive power control, dynamic voltage management, and dynamic frequency management. The modeling methods should effectively reflect the dynamic characteristics of distributed PV in large-scale simulations of distribution networks and enable dynamic analysis of multiple grid-connected PV. Furthermore, these methods should provide the benefits of flexibility in parameter adjustment and robust applicability.
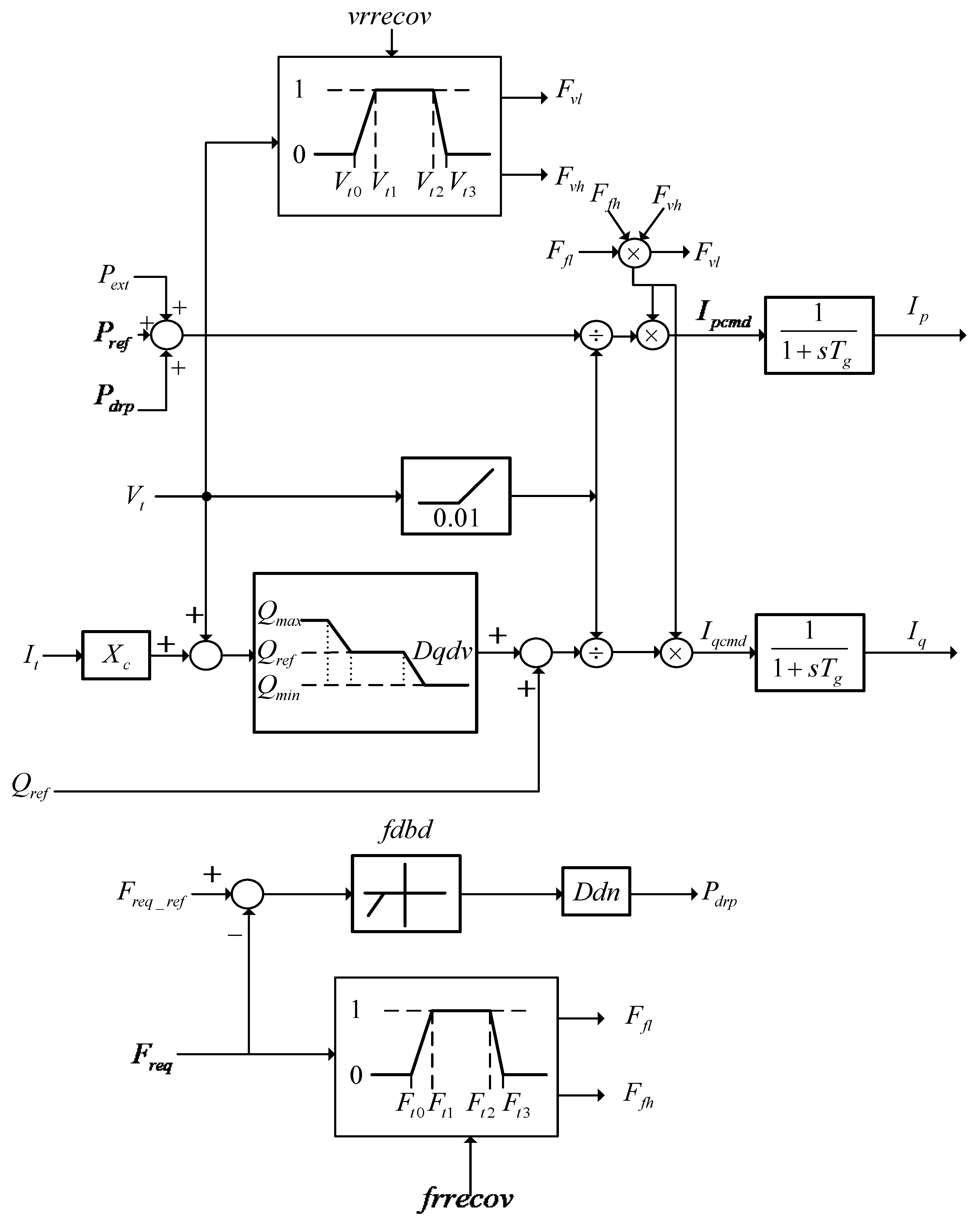
As shown in
Figure 1, the distributed PV model constructed in this paper is equipped with input sections such as the active power reference value (
Pref), external additional active power input (
Pext), reactive power reference value (
Qref), and frequency reference value (
Freq_ref). It is connected to the distribution network through an external impedance
Xc, with an output current (
It) and voltage at the point of common coupling (
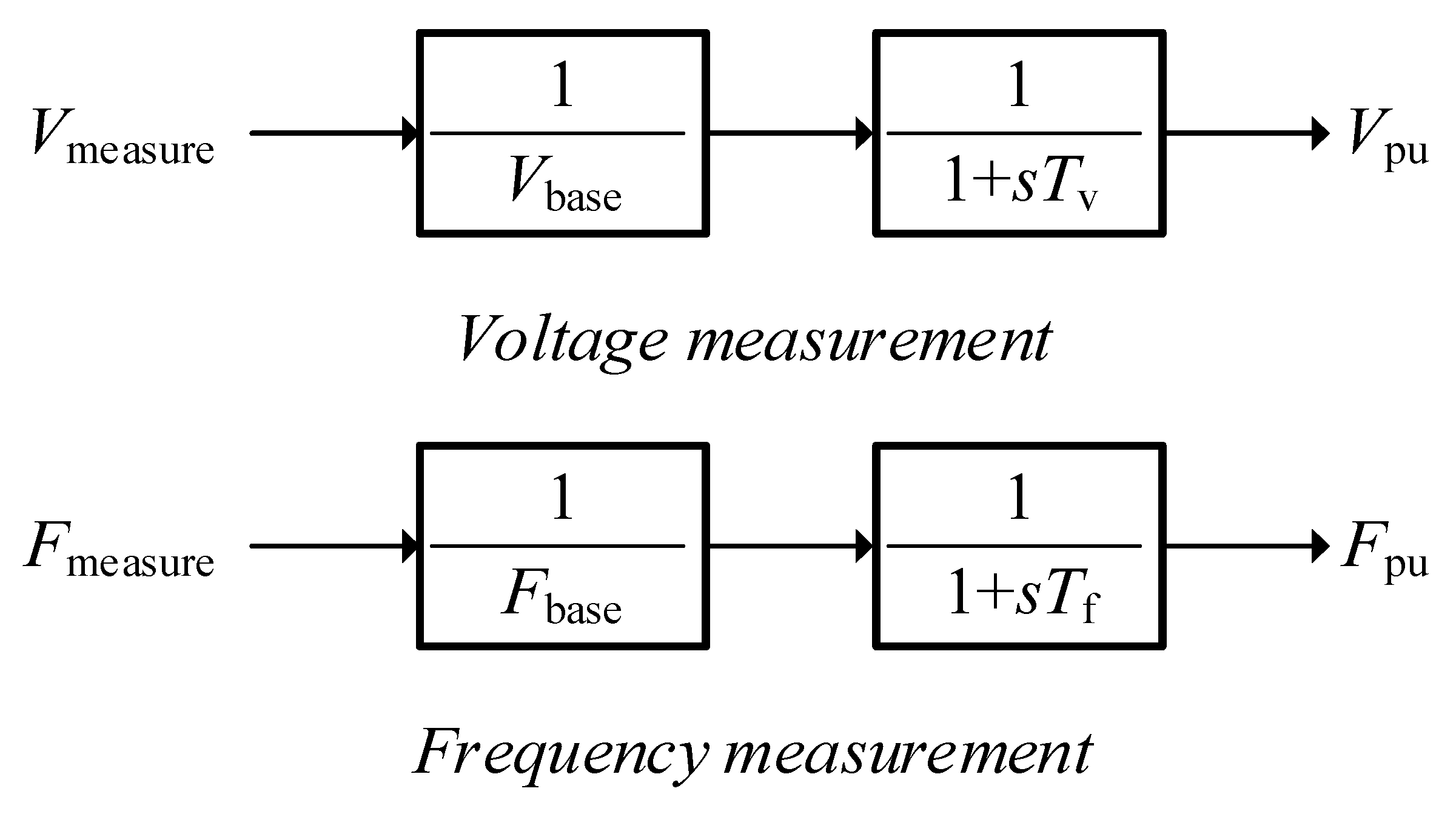
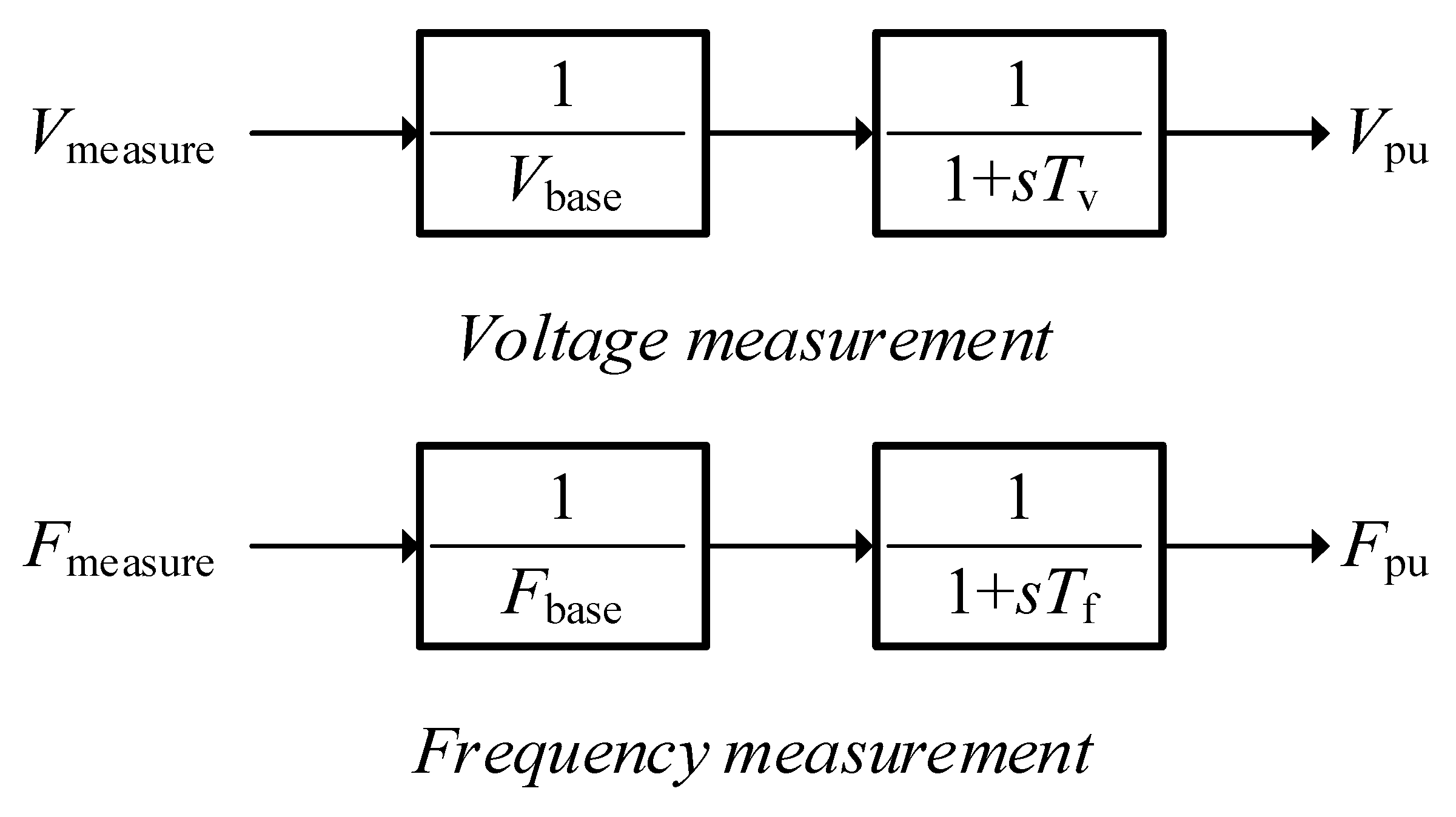
Vt). In addition, the distributed PV model constructed in this paper is equipped with reactive power voltage compensation and active power frequency regulation functions. The implementation of these functions requires the distributed PV model to have the capability to measure both the voltage and frequency at the PCC.
2.1.1. The Reactive Power Voltage Compensation Function of the Distributed PV Model
The
Q(
U) control strategy based on the voltage amplitude is realized by acquiring voltage information at the PCC (
Vt). The reactive power reference value (
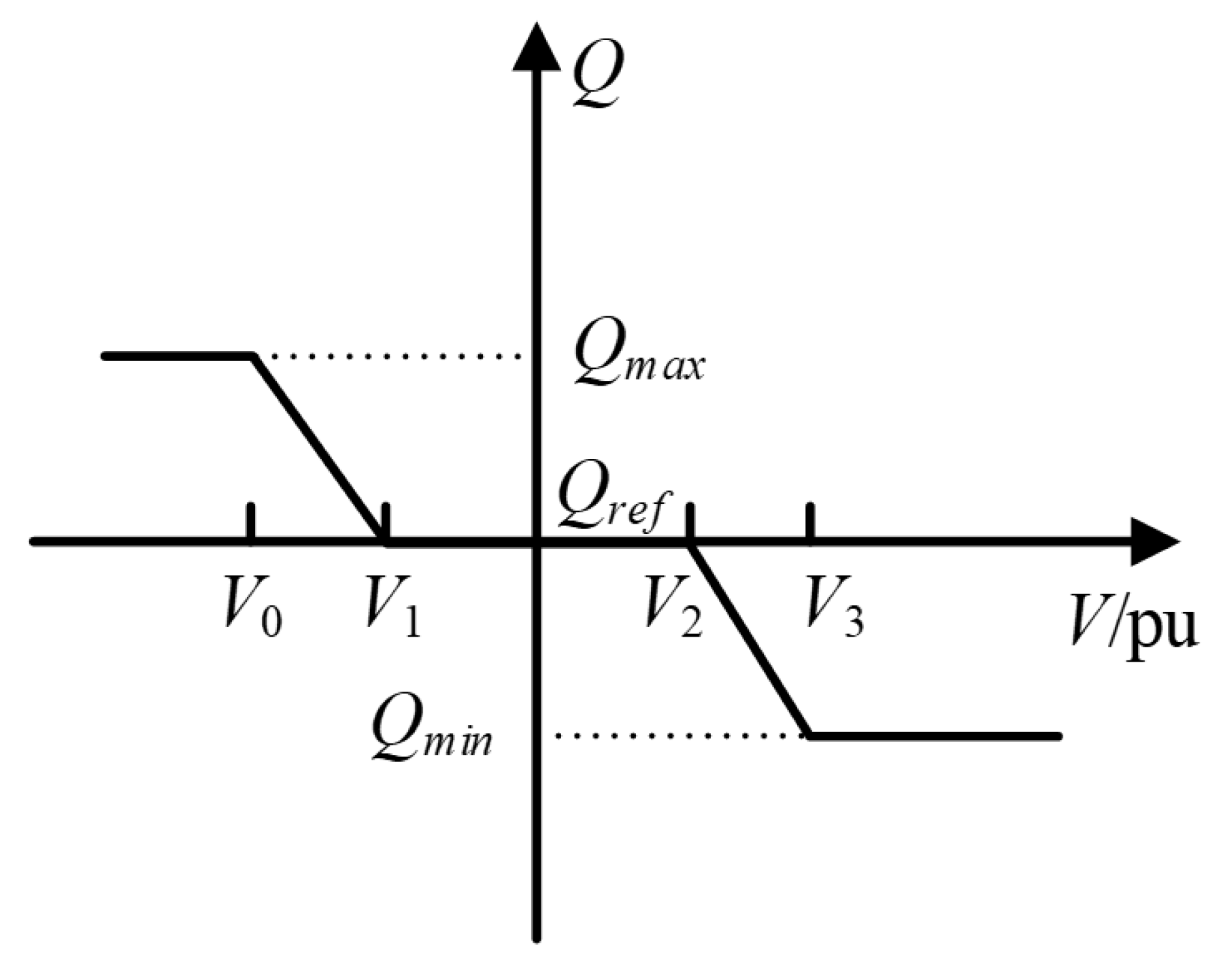
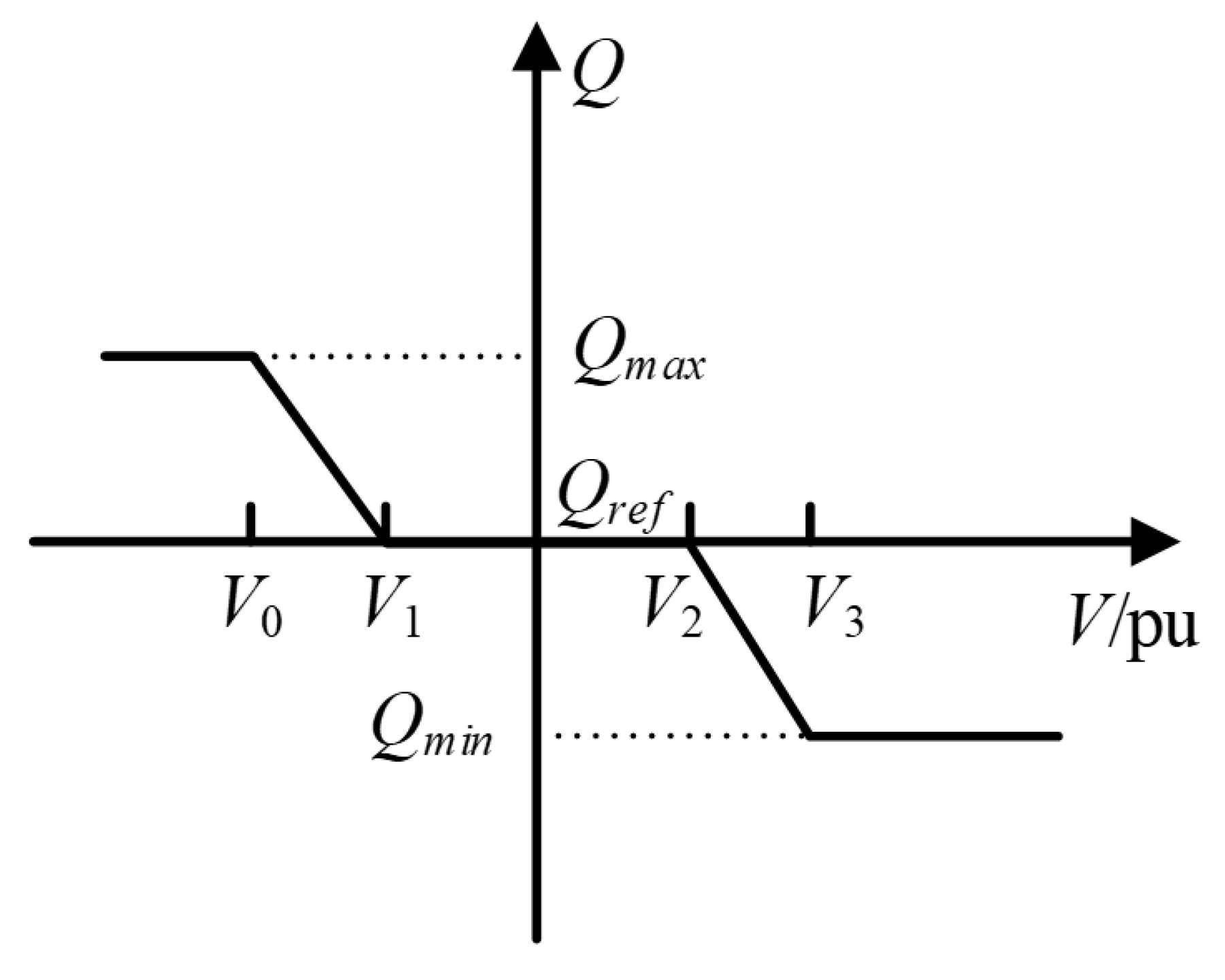
Q) is obtained through the conversion of voltage information, and the control strategy is expressed as follows:
In the formula, Qmax represents the maximum reactive power output of the inverter, and V0, V1, V2, and V3 are typically set to 0.95 p.u., 0.98 p.u., 1.02 p.u., and 1.05 p.u., respectively.
Figure 2 illustrates the droop curve under the
Q(
U) control strategy. From the figure, it is evident that when
V >
V2, the reactive power output from distributed PV systems becomes increasingly smaller (generally negative), indicating that the distributed PV systems are absorbing inductive reactive power. When
V >
V3, the reactive power absorbed by the distributed PV systems reaches its maximum. This maximum value is determined based on the inverter’s capacity to limit the rise in voltage at the PCC. Conversely, when
V <
V1, the reactive power output from the distributed PV systems increases (generally positive), meaning that the distributed PV systems are supplying inductive reactive power to the distribution grid. When
V <
V0, the reactive power supplied by distributed PV systems to the distribution grid hits its maximum. This maximum contribution is determined by the inverters’ capacities and is essential in reinforcing the voltage at the PCC, effectively counteracting voltage declines. The
Q(
U) control strategy fine-tunes the reactive power management of distributed PV systems in response to real-time voltage data at the grid interconnection, enabling every connected distributed PV system to actively engage in the dynamic voltage regulation of the distribution grid.
2.1.2. The Active Power Frequency Regulation Function of the Distributed PV Model
Primary frequency regulation at PV stations is mainly achieved through PV inverters. When the distributed PV’s measuring devices detect changes in the distribution network’s frequency, the distributed PV will adaptively adjust its output of active power through the active power frequency regulation function to respond to the instantaneous changes in the distribution network’s frequency. If the distribution network experiences a dip in frequency, distributed PV systems escalate their active power output to elevate the network’s frequency. Conversely, in instances where the network’s frequency is above the desired level, these systems curtail their active power contribution to decrease the frequency. This adaptive approach allows distributed PV systems to contribute effectively to the frequency regulation of the distribution network, playing a pivotal role in ensuring its secure and stable functionality.
The active power frequency regulation control strategy for distributed photovoltaics is articulated as follows:
In the formula, Ddn represents the coefficient for active power frequency regulation. When Freq < Freq_ref, this reflects a situation where the frequency detected at the PCC falls beneath the standard threshold, necessitating an augmentation of active power output from distributed photovoltaic systems. On the flip side, Freq > Freq_ref indicates a frequency at the PCC exceeding the norm, which prompts a decrease in the active power output from distributed photovoltaics.
Furthermore, the distributed photovoltaic model presented in this study introduces a sophisticated approach for managing both active and reactive current reference values. This is achieved through a dual control strategy that simultaneously considers voltage and frequency management at the PCC, underscoring a holistic framework for optimizing grid integration and operational performance.
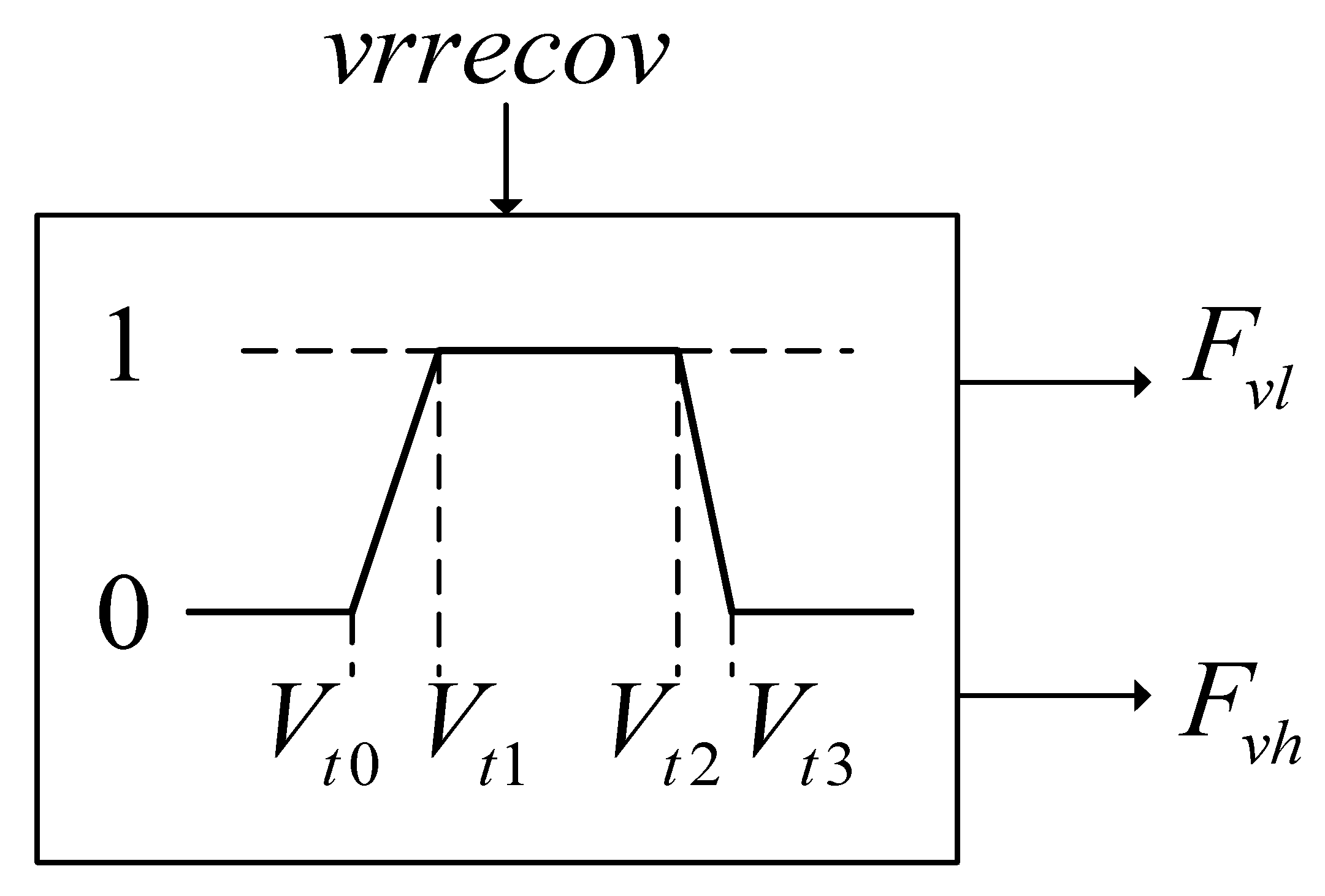
Within this framework, the approach to voltage management is depicted in
Figure 3, and the corresponding strategy can be described as follows:
When the voltage at the PCC of distributed photovoltaics falls within the low voltage range (
Vt0 <
Vt <
Vt1), the low voltage section’s voltage pointer
ziVL1 is set to 1 and
zuVL1 to 0, with the voltage management coefficient
Fvl being derived from Formula (3). Conversely, when the voltage at the PCC of distributed PV falls within the high voltage range (
Vt2 <
Vt <
Vt3), the high voltage section’s voltage pointer
ziVL2 is set to 1 and
zlVL2 to 0, with the voltage management coefficient
Fvh obtained from Formula (4). These voltage management coefficients,
Fvl and
Fvh, are integral to formulating both the active current reference (
Ipcmd) and reactive current reference (
Iqcmd), as illustrated in
Figure 4. By employing these coefficients, a dynamic management framework for active and reactive current references is established, tailored to the voltage at the PCC of distributed PV systems.
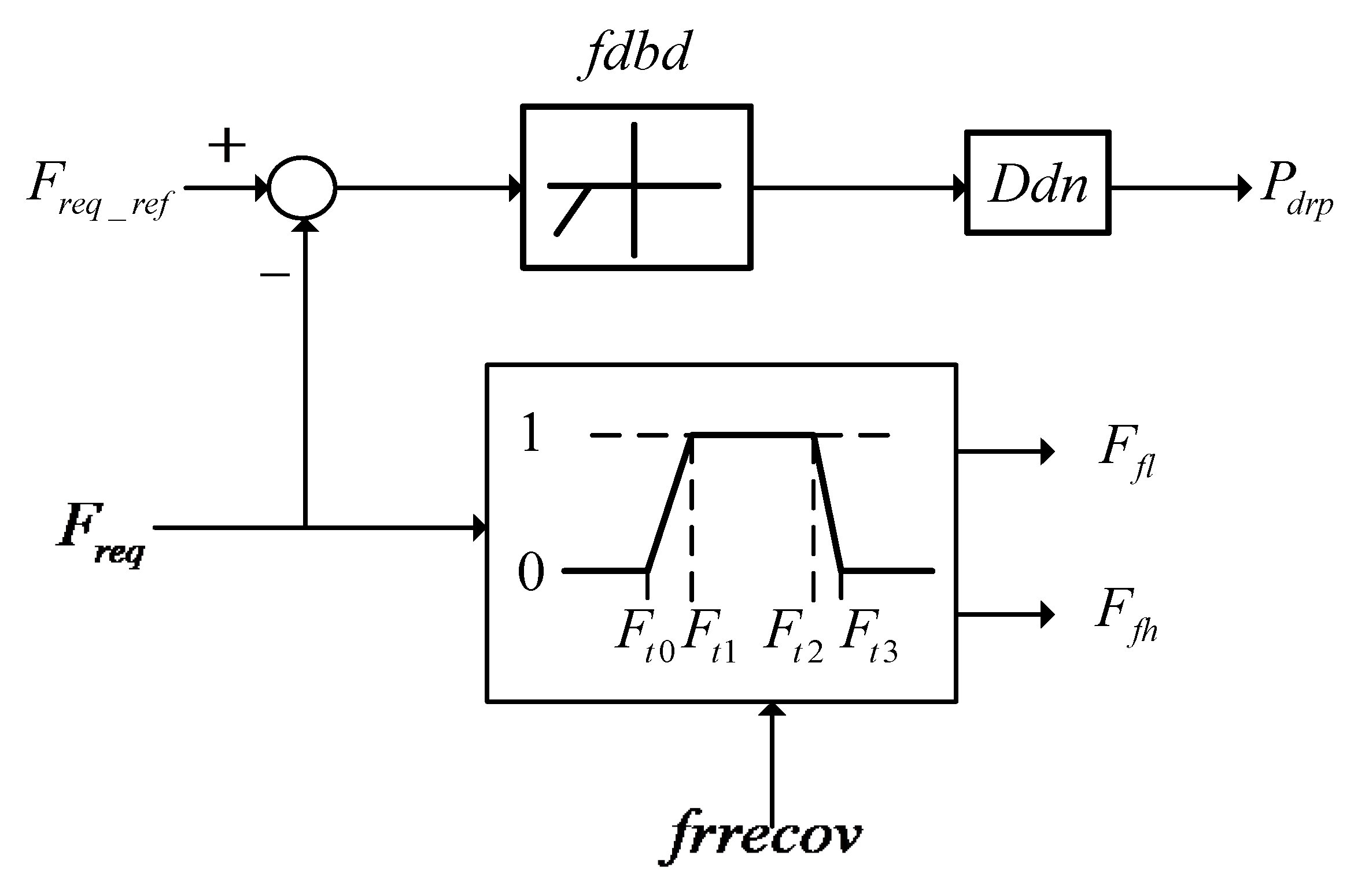
The frequency management functionality of distributed photovoltaics is depicted in
Figure 5, and the strategy can be described as follows:
When the frequency at the PCC of distributed PV falls within the low frequency range (
Ft0 <
Freq<
Ft1), the low frequency segment’s frequency pointer
ziFL1 is set to 1, and
zuFL1 to 0, with the frequency management coefficient
Ffl obtained from Formula (5). Conversely, when the frequency falls within the high frequency range (
Ft2 <
Freq <
Ft3), the high frequency segment’s frequency pointer
ziFL2 is set to 1, and
zlFL2 to 0, with the frequency management coefficient
Ffh determined by Formula (6). The frequency management coefficients,
Ffl and
Ffh, play a pivotal role in shaping the active current reference (
Ipcmd) and reactive current reference (
Iqcmd), as illustrated in
Figure 4. Through this mechanism, a dynamic framework for adjusting active and reactive current references is established, rooted in the frequency at the PCC of distributed PV systems.
2.2. Energy Storage Model
Following the carbon peaking and carbon neutrality goals, there has been a remarkable surge in the development of new energy projects across diverse regions. China’s rich natural resources have enabled the widespread integration of distributed wind and solar PV systems into the distribution grid. However, the inherent sensitivity to environmental factors, coupled with the unpredictability and variability of distributed energy production, poses significant challenges to the stability, reliability, and power quality of the grid. Moreover, the increasing presence of nonlinear, impulsive loads and power electronics conversion devices further aggravates power quality concerns within the distribution grid.
Amid escalating interest in energy storage system research, the implementation of energy storage solutions to improve the power quality in the distribution grid has increasingly captivated academic attention. Energy storage systems disrupt the conventional instantaneous consumption and balance paradigm of power systems, offering rapid response and bi-directional control capabilities that facilitate frequency regulation, peak shaving, and improvement of power quality. Incorporating energy storage into the distribution grid strengthens its ability to integrate distributed energy resources, thereby optimizing resource distribution. Given this scenario, creating a versatile, adaptable energy storage model specifically designed for the distribution grid is essential for effective strategic planning and ensuring a secure, stable network operation.
The dynamic simulation of Integrating energy storage models into the distribution grid offers valuable insights into the optimal grid connection capacities for energy storage systems. This process facilitates a comprehensive analysis of how the combined integration of distributed photovoltaics and energy storage can enhance the distribution grid’s resilience to transient voltage fluctuations, frequency stability, and overall power quality. Moreover, it enables an exploration of the beneficial effects that the integration of energy storage systems has on the distribution grid’s capacity to accommodate distributed energy resources effectively.
The energy storage system model presented in this study integrates essential dynamic elements, including active power control, reactive power control, dynamic voltage regulation, and charge state management. It is capable of effectively reflecting the dynamic characteristics of energy storage systems in large-scale distribution grid simulations, facilitating dynamic analysis of energy storage integration into the grid.
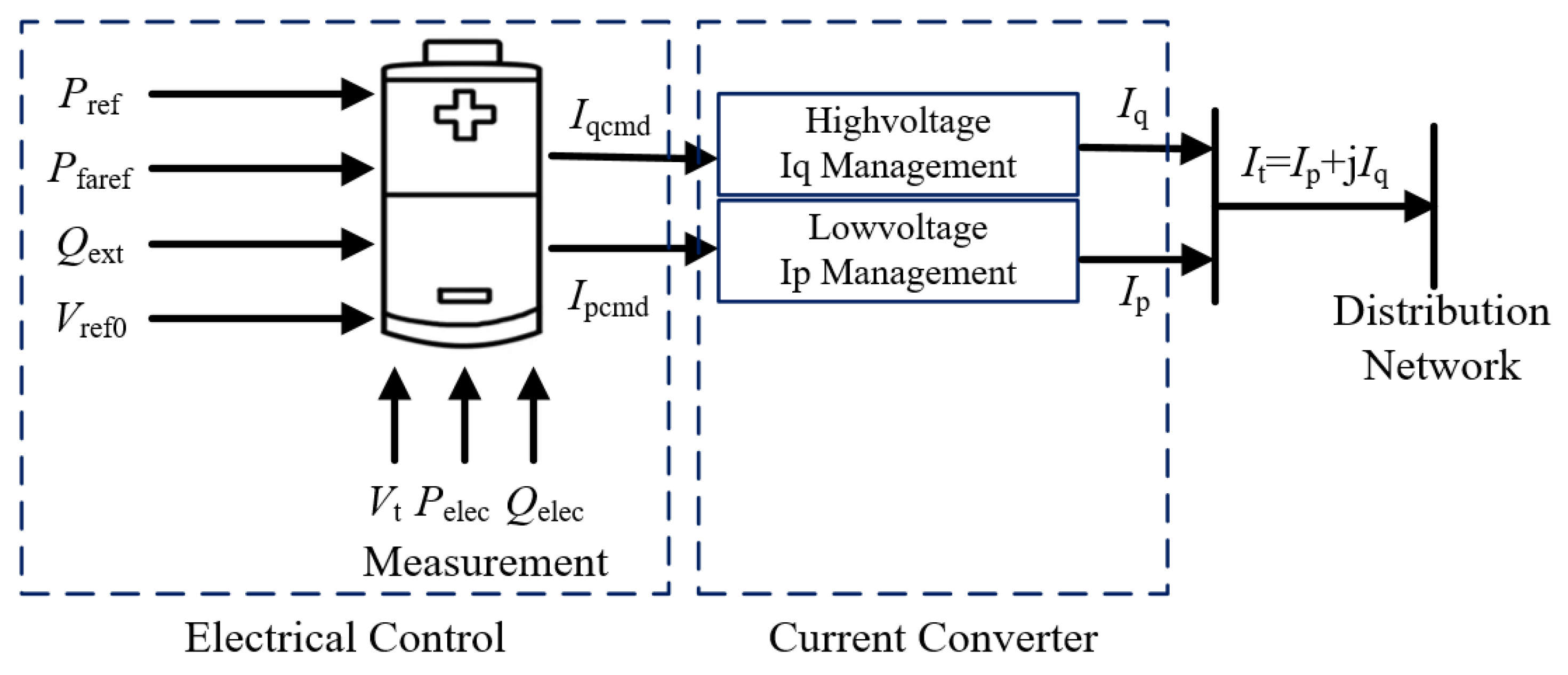
Figure 6 illustrates the energy storage model established in this paper, which is divided into an electrical control part and a current converter part. The electrical control part receives external commands for active power reference value (
Pref), power factor angle reference value (
Pfaref), external reactive power reference value (
Qext), and voltage reference value (
Vref0).
It also measures the voltage at the energy storage system’s PCC (
Vt), the active power output from the energy storage (
Pelec), and the reactive power output (
Qelec). This enables the setting of the active current reference value (
Ipcmd) and the reactive current reference value (
Iqcmd).
The control strategy of the electrical control part in the energy storage model, as shown in
Figure 6.
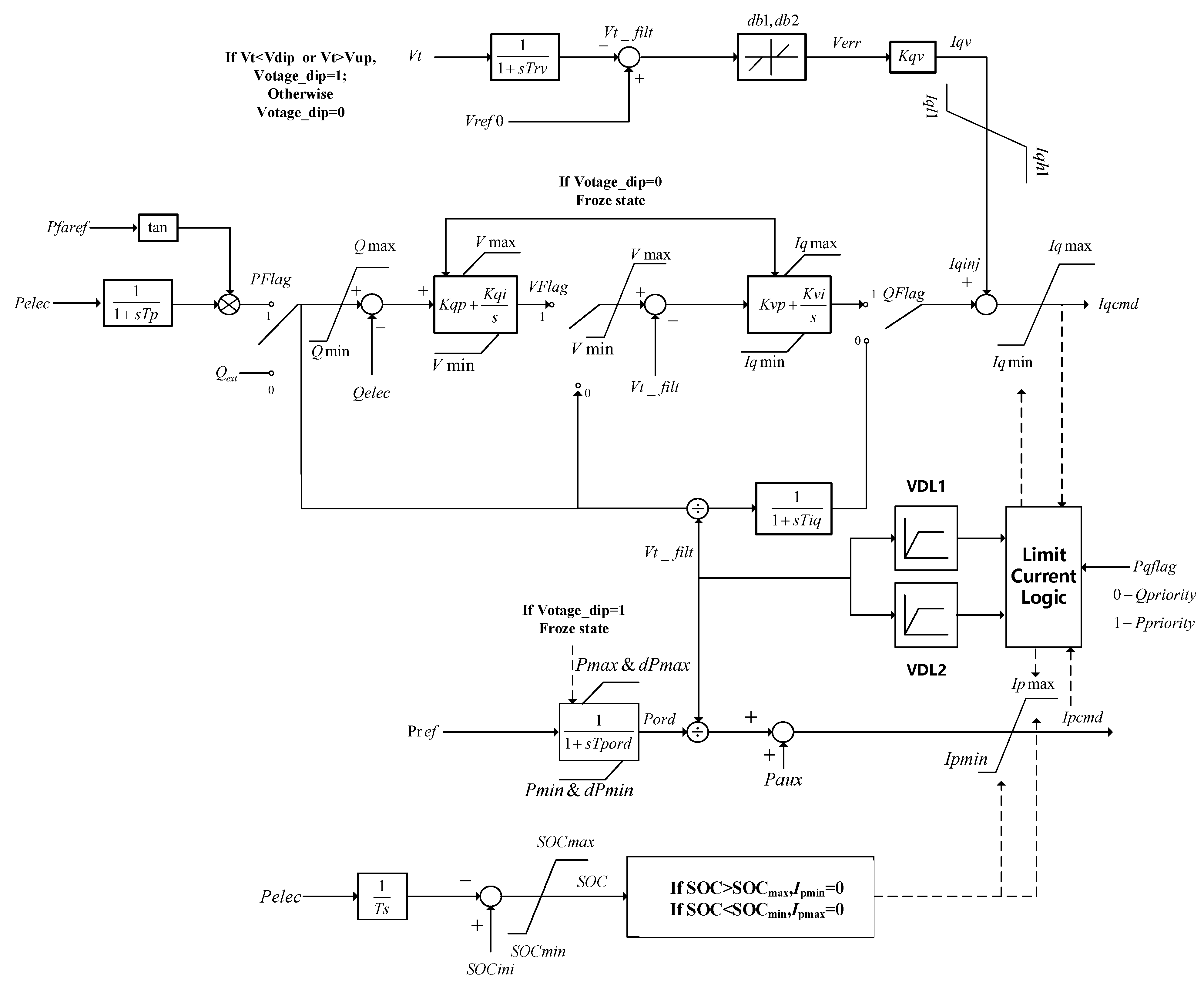
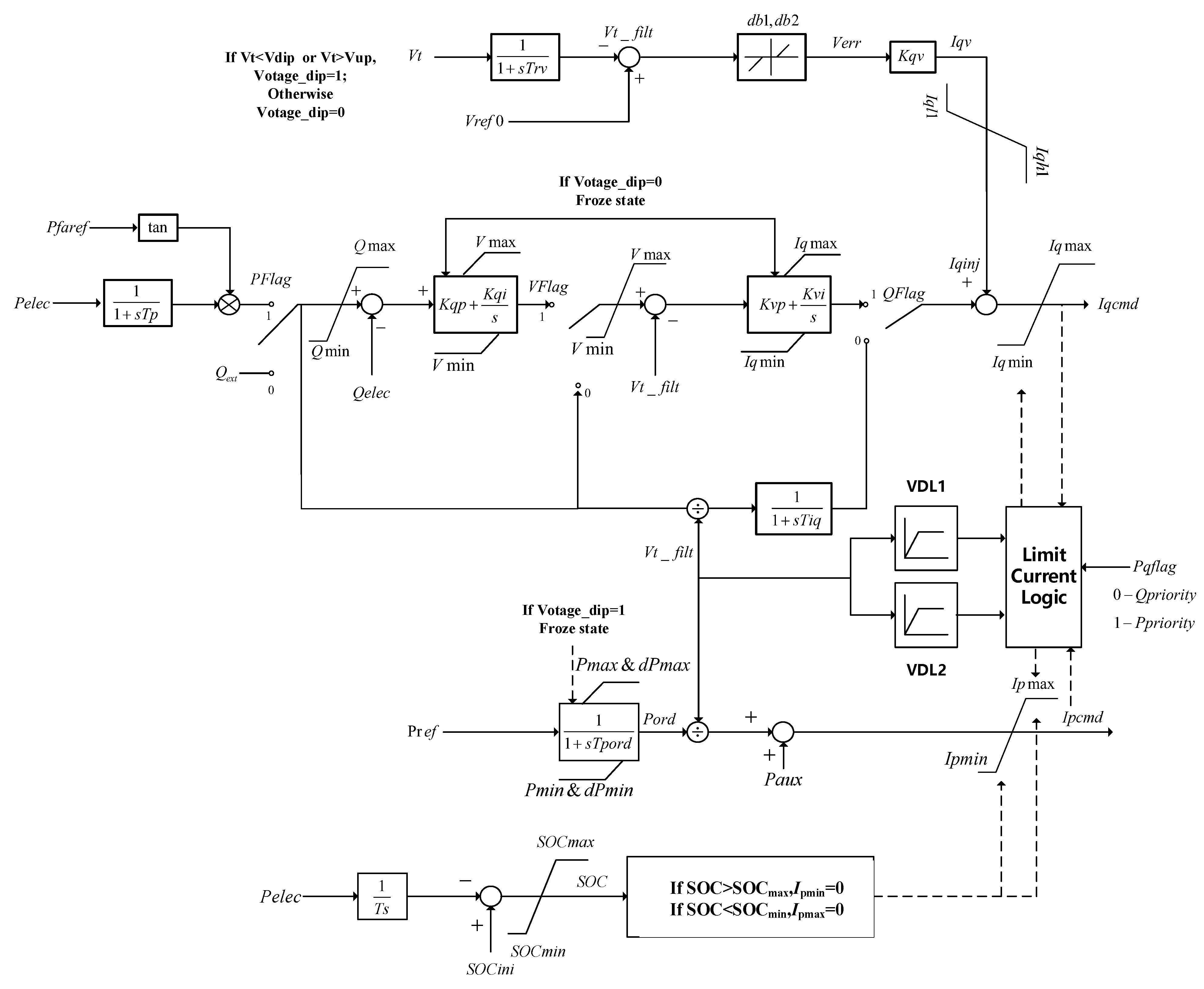
As shown in
Figure 7, the electrical control part of the energy storage model manages the active power and reactive power output, and achieves the aforementioned management by tuning the reference values of active current and reactive current. The reactive power control mode of the energy storage system can switch between different control modes based on the selection of several flags. These modes are shown as follows:
- (1)
Local Constant Reactive Power Control: PFlag = 0, QFlag = 0, and VFlag = 0 or 1;
- (2)
Local Constant power factor angle control: PFlag = 1, QFlag = 0, and VFlag = 0 or 1;
- (3)
Local Node Voltage Control: PFlag = 0, VFlag = 0, and QFlag = 1;
- (4)
Local Reactive Power-Voltage Coordinated Control: Pflag = 0, Vflag = 1 and Qflag = 1.
The electrical control part of the energy storage system manages the state of charge (SOC) and controls the maximum output current by constraining upper and lower limits on the reference values for both active and reactive current outputs. Based on the initial state of charge (SOC
ini), the current state of charge of the energy storage system is calculated through the integration of the output active power. During charging, when the energy storage system generates negative active power (
Pelec), the SOC tends to increase. Upon reaching the upper limit of the state of charge (SOC
max), the energy storage system needs to restrict charging to prevent battery damage. At this point, Ipmin is set to 0, and the energy storage system can only engage in discharging. During discharging, when the energy storage system outputs positive active power (
Pelec), the state of charge tends to decrease. Upon reaching the lower limit of the state of charge (SOC
min), the energy storage system needs to restrict discharging to prevent battery over-discharge damage. At this point, Ipmax is set to 0, and the energy storage system can only engage in charging. The meanings of the variables in
Figure 7 are demonstrated in
Table A2 at
Appendix A.
Furthermore, the current limiting components (VDL1, VDL2) of the energy storage model are depicted in
Figure 7.
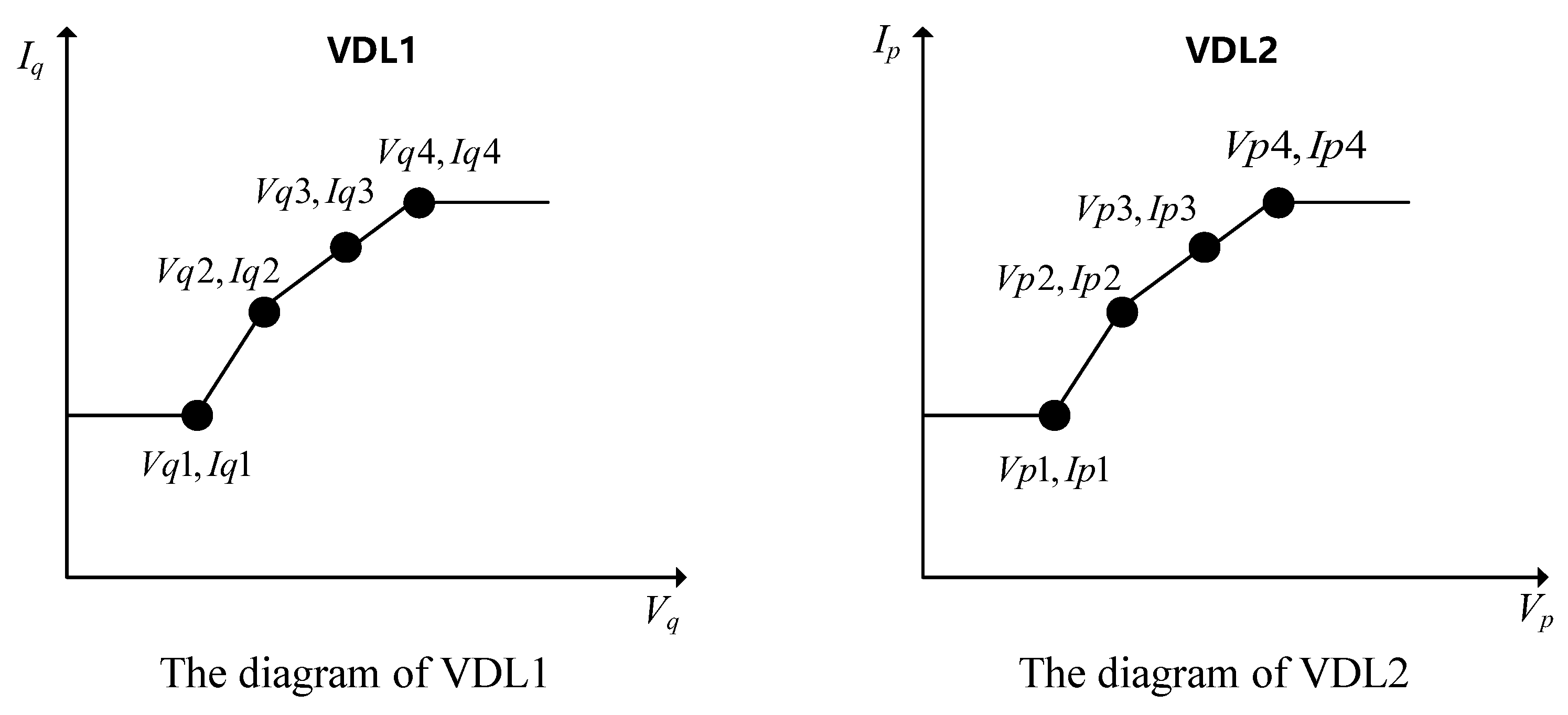
In
Figure 8, VDL1 represents the reactive current limiting module for energy storage, while VDL2 denotes the active current limiting module for energy storage. VDL1 generates a corresponding reactive current limit value (
Iq) based on the voltage at the PCC of the energy storage device (
Vq) and transfers it to the current limiting logic section. Similarly, VDL2 generates an appropriate active current limit value (
Id) based on the voltage at the PCC of the energy storage device (
Vd) and passes it to the current limiting logic section (see
Figure 7). Since the energy storage device is connected to the distribution network through an inverter, the inverter requires a current protection function. Thus, both reactive and active current outputs have certain limits; the upper limit for reactive current is set as
Iq4 in VDL1, and the upper limit for active current is set as
Ip4 in VDL2.
In
Figure 9, the control strategy of the current converter part of the energy storage model is as follows:
As depicted in
Figure 9, the current converter receives active current commands (
Ipcmd) and reactive current commands (
Iqcmd) from the electrical control part. It interacts with the distribution grid to achieve the exchange of active current (
Ip) and reactive current (
Iq) through the high-voltage reactive current management section and the low-voltage active current management section. The meanings of the variables in
Figure 9 are as shown in
Table A3 at
Appendix A.
The control strategy of
Figure 9 is expressed as follows:
The interaction of reactive current (Iqgird) between the energy storage model’s current converter and the distribution grid is derived from Formula (7). In instances where the PCC voltage is observed to be high, it is advisable to diminish the reactive current input to prevent an increase in grid voltage. Similarly, the active current (Ipgrid) interaction is computed using Formula (8). A lower-than-normal grid connection voltage necessitates a decrease in active current injection, redirecting a greater portion of the output towards reactive current to bolster the grid voltage. Formula (11) outlines the low voltage ride-through (LVRT) control strategy of the energy storage system. If the PCC voltage is detected to be below the standard level, the Lvplsw indicator decides on the activation of LVRT control. This control strategy constricts the active current, ensuring the energy storage system can supply adequate reactive current throughout the LVRT event to maintain grid voltage support.
2.3. Wind Turbine Model
As environmental conservation becomes a growing priority, the allure of new, clean, and efficient energy sources is on the rise. Wind power, in particular, has emerged as a pivotal component in the new energy landscape due to its relatively short development cycle—often spanning just weeks or months—which has propelled its swift expansion. Globally, wind power’s installed capacity has seen an impressive average annual growth rate of 31%, with certain countries achieving even more remarkable increases of up to 60% annually. China, with its vast wind resources, is well-positioned to fulfill its escalating electrical needs through wind energy. Especially in China’s western regions, characterized by abundant wind resources, sparse populations, and dispersed residential areas, the traditional large-scale power grid falls short of meeting electricity demands efficiently. In these areas, localized wind power generation emerges as a viable and effective solution.
To encapsulate, stepping up the exploration and harnessing of wind resources not only promises to mitigate energy deficits but also to refine the prevailing energy mix, which is heavily reliant on coal, oil, and natural gas. This strategy plays a significant role in environmental preservation, curtails energy consumption, and helps temper the global warming crisis by reducing greenhouse gas emissions. Thanks to the ongoing advancement of wind power technologies, tapping into wind resources stands to deliver substantial economic and societal advantages, heralding a bright future for the market.
In this context, the modeling and dynamic simulation of wind turbines emerge as essential components in the exploitation of wind resources. Developing detailed and universally applicable models for wind turbines facilitates their dynamic integration simulations within the distribution grid. This approach not only guides the capacity planning for wind turbine connections to the grid but also supports simulations under fault conditions, assists in crafting and fine-tuning LVRT strategies, and examines the complex dynamics when multiple wind turbines are interconnected with the distribution network.
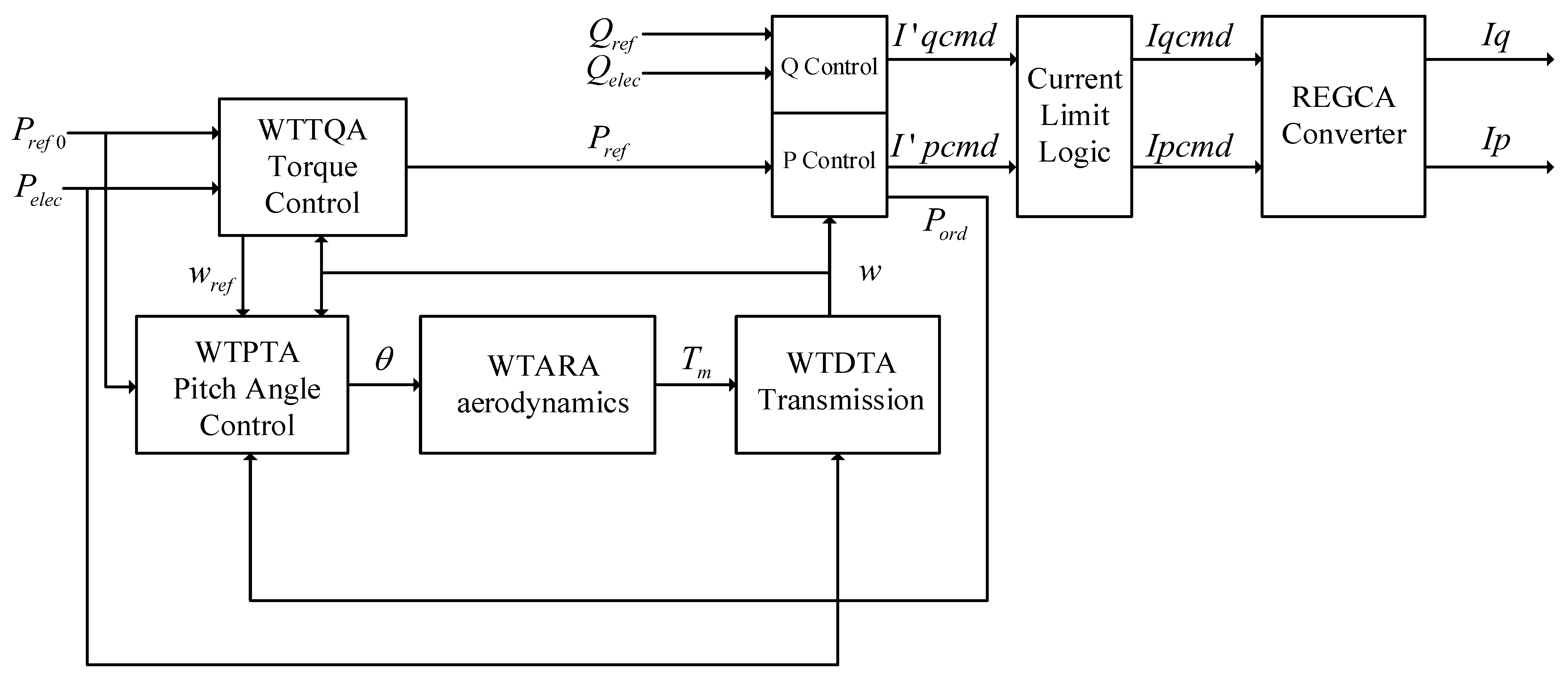
The wind turbine model established in this paper includes modules for torque control, pitch angle control, aerodynamics, transmission, electrical control, and converters (as shown in
Figure 10). It is capable of effectively simulating the physical dynamics and electrical behaviors of wind turbines within large-scale simulations of the distribution grid, facilitating dynamic analysis of wind turbine grid integration.
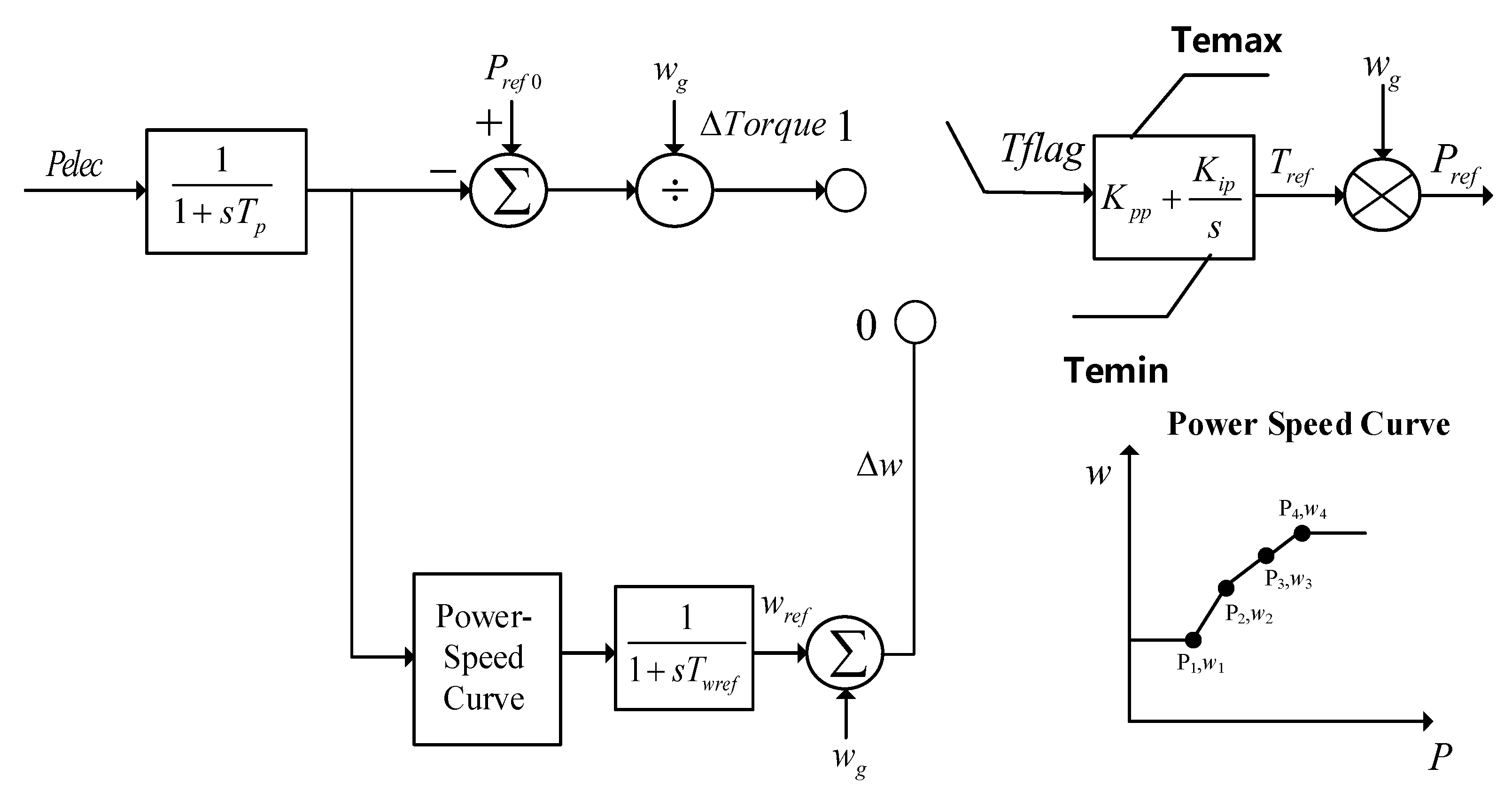
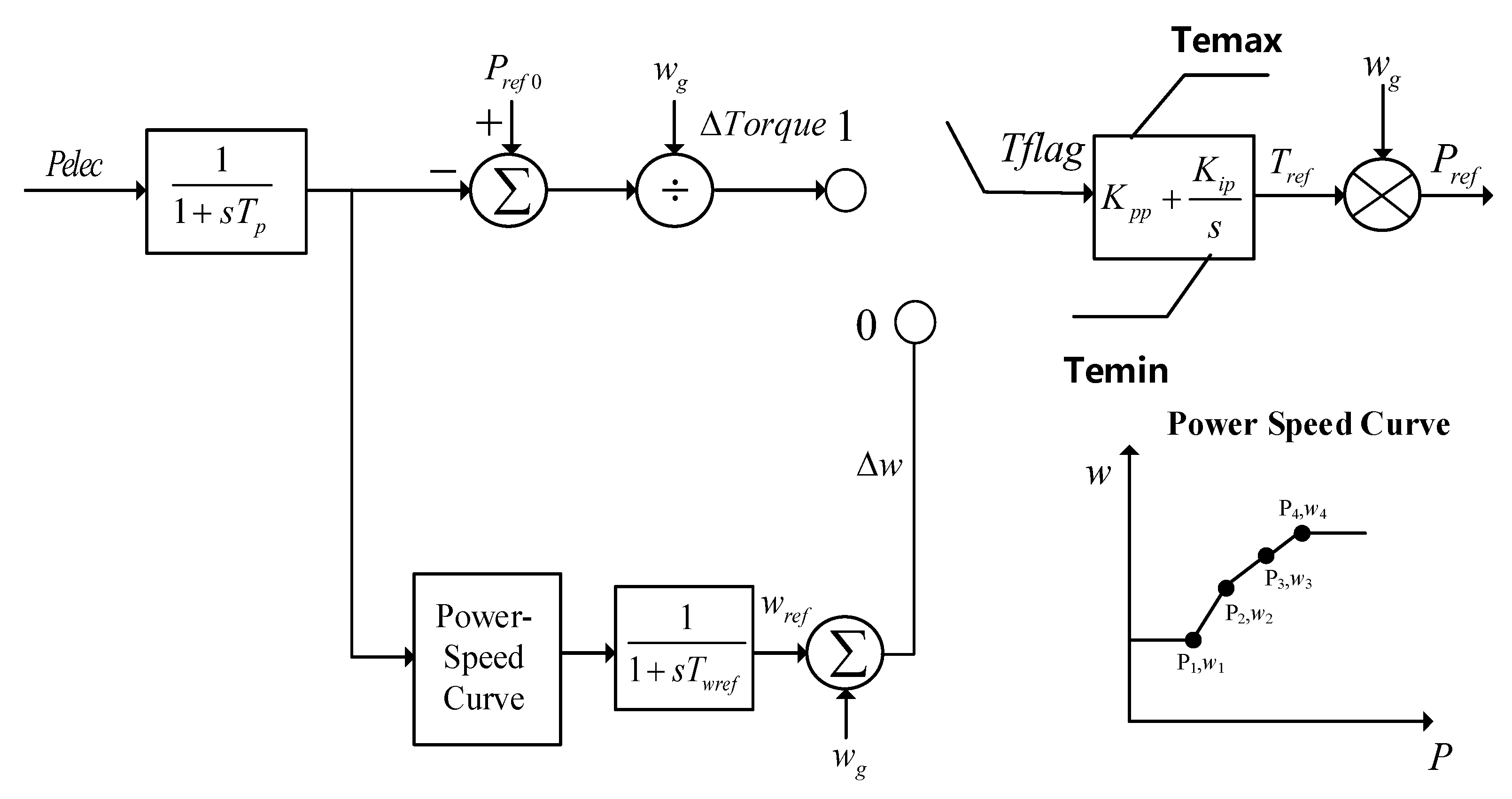
The control strategy of the torque control module in
Figure 11 is as follows:
The wind turbine torque control module plays a crucial role in optimizing the efficiency of wind energy conversion. It adjusts the torque applied to the turbine’s rotor to match the wind speed, thereby maximizing power output while minimizing mechanical stress on the turbine. This control module ensures that the turbine operates within its safe operational limits, protecting it from damage caused by excessive wind speeds. By precisely controlling the rotor torque, the module also helps in stabilizing the power generation process, contributing to the reliability and stability of the power grid to which the wind turbine is connected. The torque control module receives data on the active power output (Pelec), the initial active power reference (Pref0), and the rotational speed (wg) of the wind turbine. And the torque control module outputs the active power reference (Pref) to the wind turbine’s electrical control module and the reference for rotational speed (wref) to the wind turbine’s pitch angle control module, facilitating dynamic torque control of the wind turbine. The power–speed curve dynamically adjusts the rotational speed based on the measured power data. For instance, when the measured power is P3, the rotational speed is set to w3, ensuring optimal efficiency and performance.
Some mathematical relationships for the variables are expressed as follows:
In Formula (14), Voltage_dip is determined by the electrical control module of the wind turbine generator. It is set to 1 when the voltage of the wind turbine at the PCC falls below a lower limit or exceeds an upper limit (Vt < Vdip or Vt > Vup); otherwise, it is set to 0.
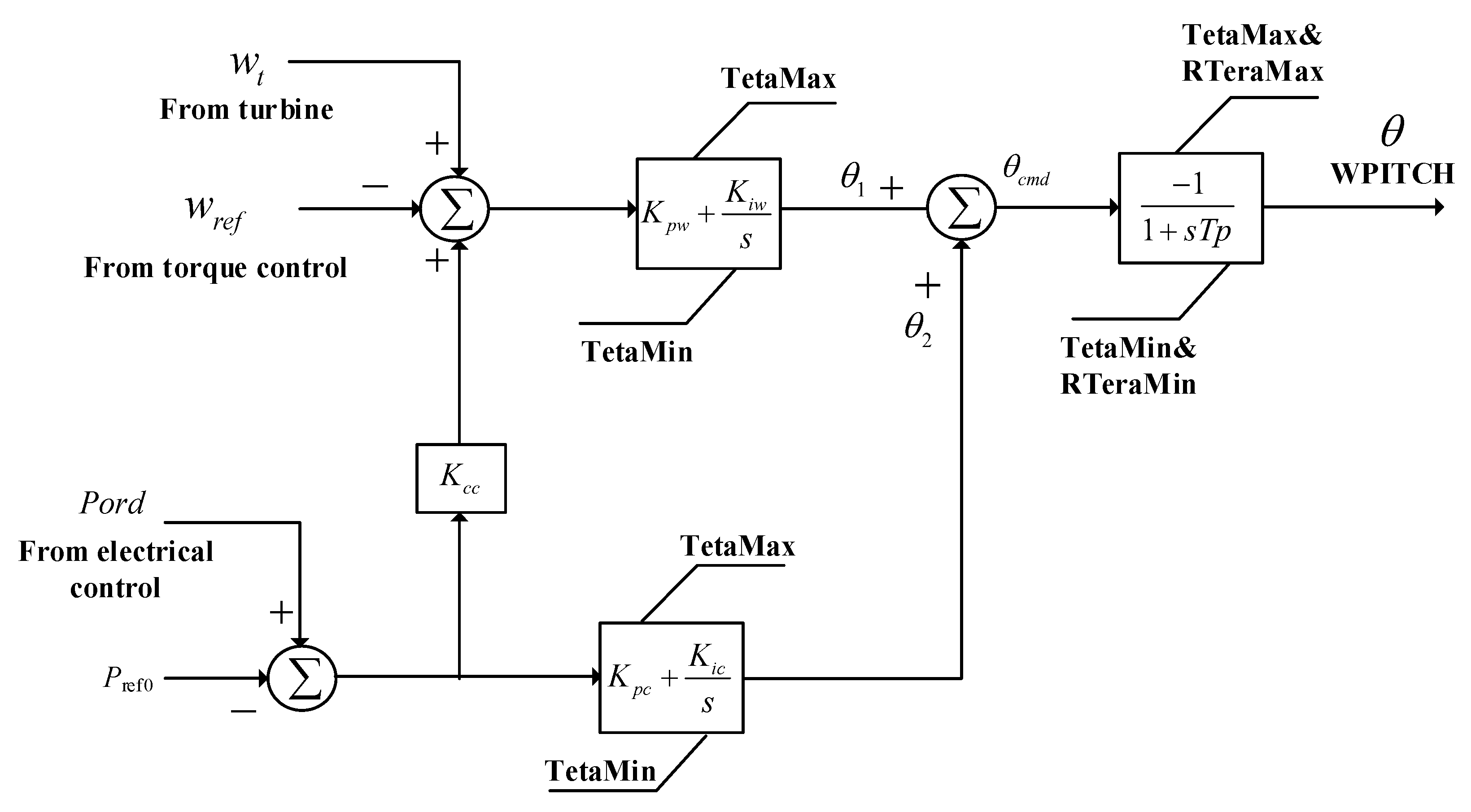
The control strategy of the pitch angle control module in
Figure 12 is as shown in the following diagram:
The pitch angle control module for wind turbines plays a pivotal role in managing the angle of the blades relative to the wind. By adjusting the pitch angle, this module regulates the amount of wind energy captured by the turbine. In low wind conditions, it decreases the pitch angle to capture as much wind as possible, maximizing power generation. Conversely, in high wind conditions, it increases the pitch angle to reduce the wind force on the blades, preventing overloading and potential damage to the turbine. This control strategy not only optimizes the efficiency of power generation across varying wind speeds but also enhances the longevity and reliability of the wind turbine system. The pitch angle control module receives the initial reference value for active power (Pref0), rotational speed information from the turbine (wt), the reference speed information from the torque control module (wref), and the power command (Pord) from the electrical control module. It outputs the pitch angle information (θ) to the wind turbine’s aerodynamics module.
Some mathematical relationships for the variables are expressed as follows:
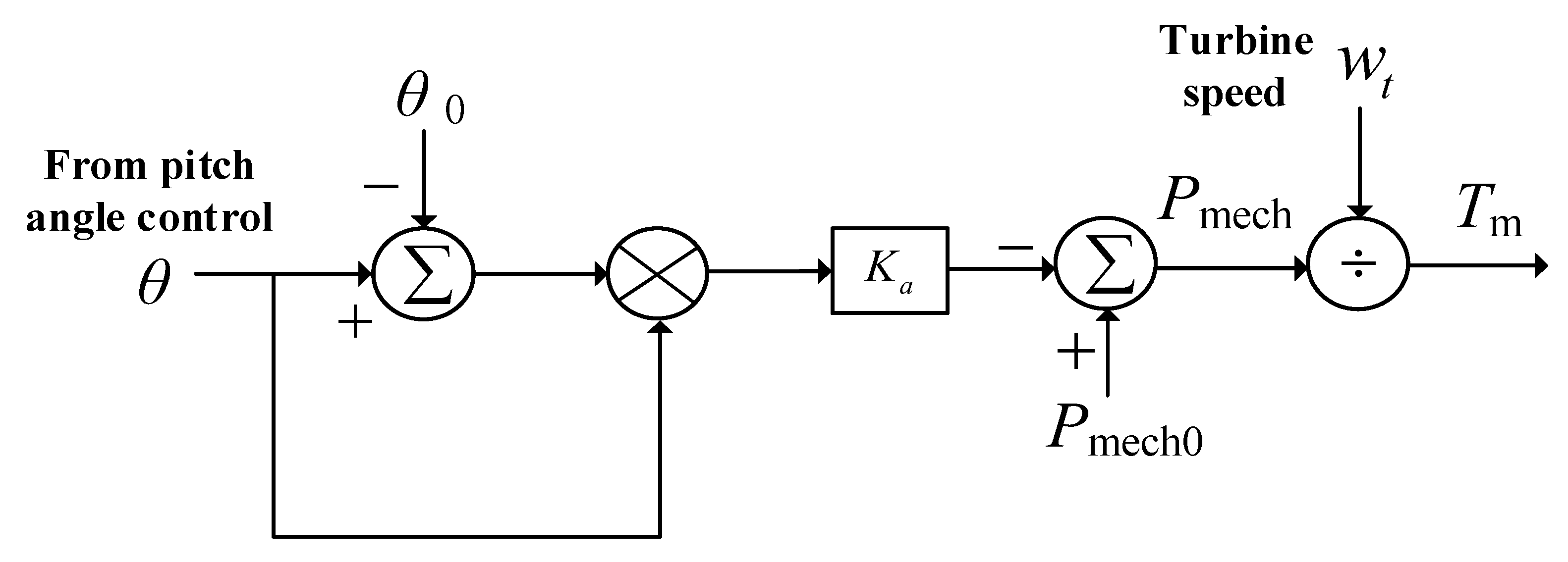
The control strategy of the aerodynamics module in
Figure 13 is as shown in the following diagram:
The aerodynamics module of a wind turbine is critical for analyzing and optimizing the interaction between the wind and the turbine blades. This module computes the lift and drag forces exerted by the wind on the blades, which are essential for determining the turbine’s power output. By understanding these aerodynamic forces, the module helps in designing blades that maximize efficiency by extracting the maximum amount of energy from the wind while minimizing losses due to drag. Additionally, the aerodynamics module plays a vital role in predicting the performance of the turbine under various wind conditions, enabling more accurate forecasting of energy production. The aforementioned functions can be achieved by flexibly adjusting the parameter K
a (the aerodynamics gain factor). The aerodynamics module receives pitch angle information (
θ) from the pitch angle control module, initial mechanical power information (
Pmech0), turbine speed information (
wt), and initial pitch angle information (
θ0). The aerodynamics module outputs torque information (
Tm) to the transmission module of the wind turbine. Some mathematical relationships for the variables are expressed as follows:
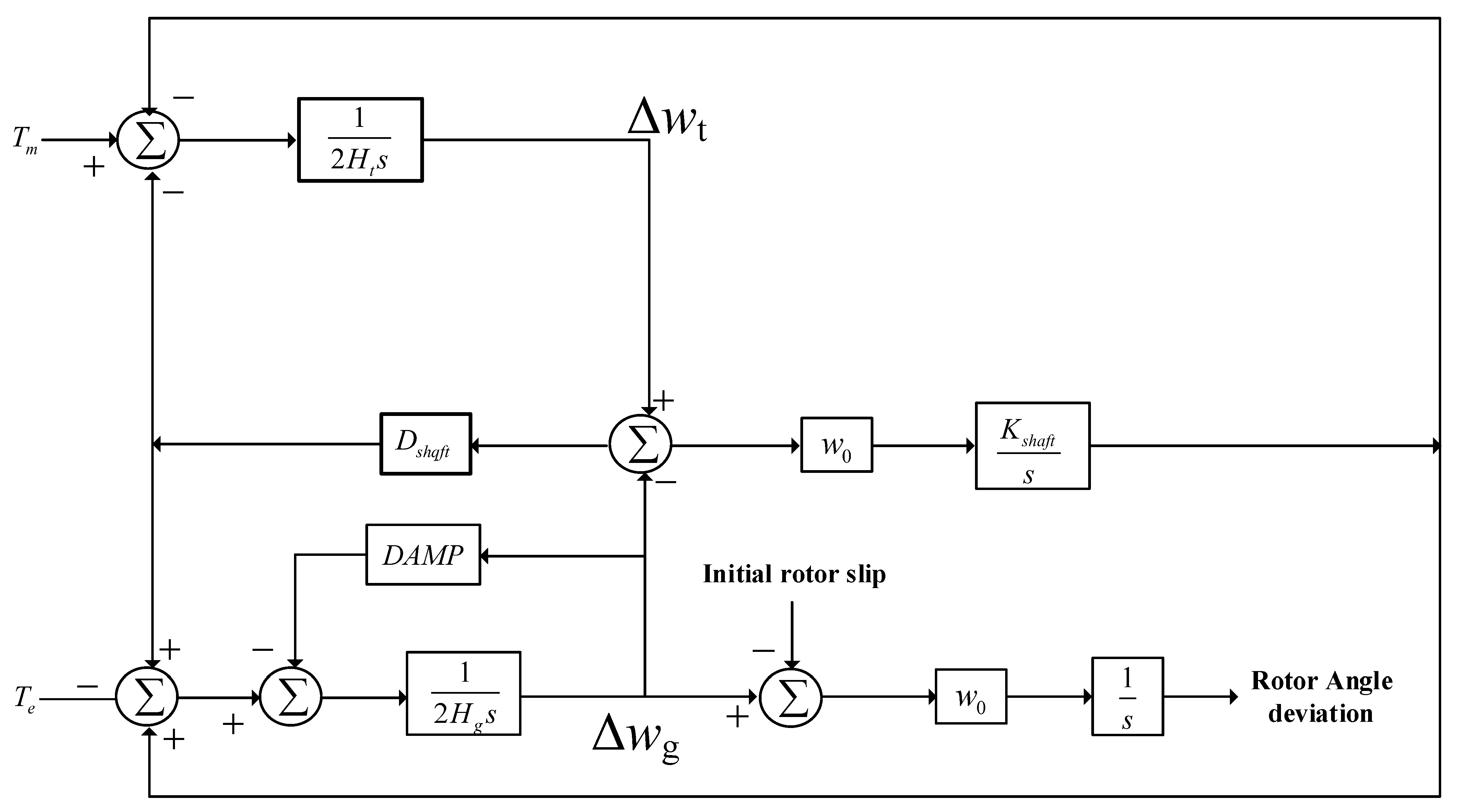
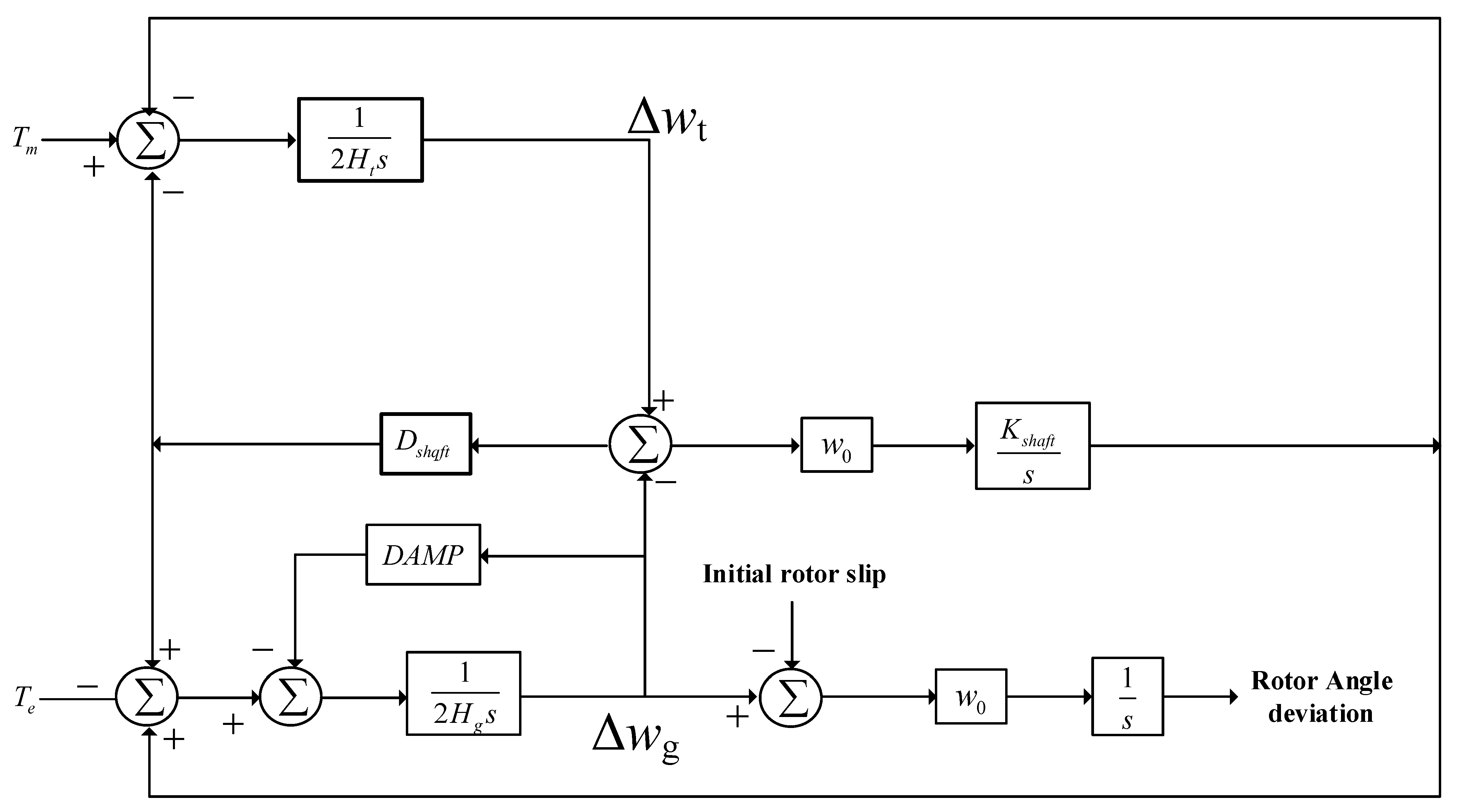
The control strategy of the transmission module in
Figure 14 is as follows:
The Generic Drive Train Model for wind turbines serves as a fundamental tool for simulating the mechanical and electrical interactions within the turbine’s drive train system. This model encapsulates the dynamics between the turbine’s rotor, gearbox, and generator, offering insights into how kinetic energy from the wind is converted into electrical energy. The transmission module receives torque information (
Tm) from the aerodynamics module, and outputs speed information (
w) to the electrical control module. Some mathematical relationships for the variables are expressed as follows:
In Equation (26), the variable “δtg” represents an intermediate variable in the process “(Δwt − Δwg)/s”.
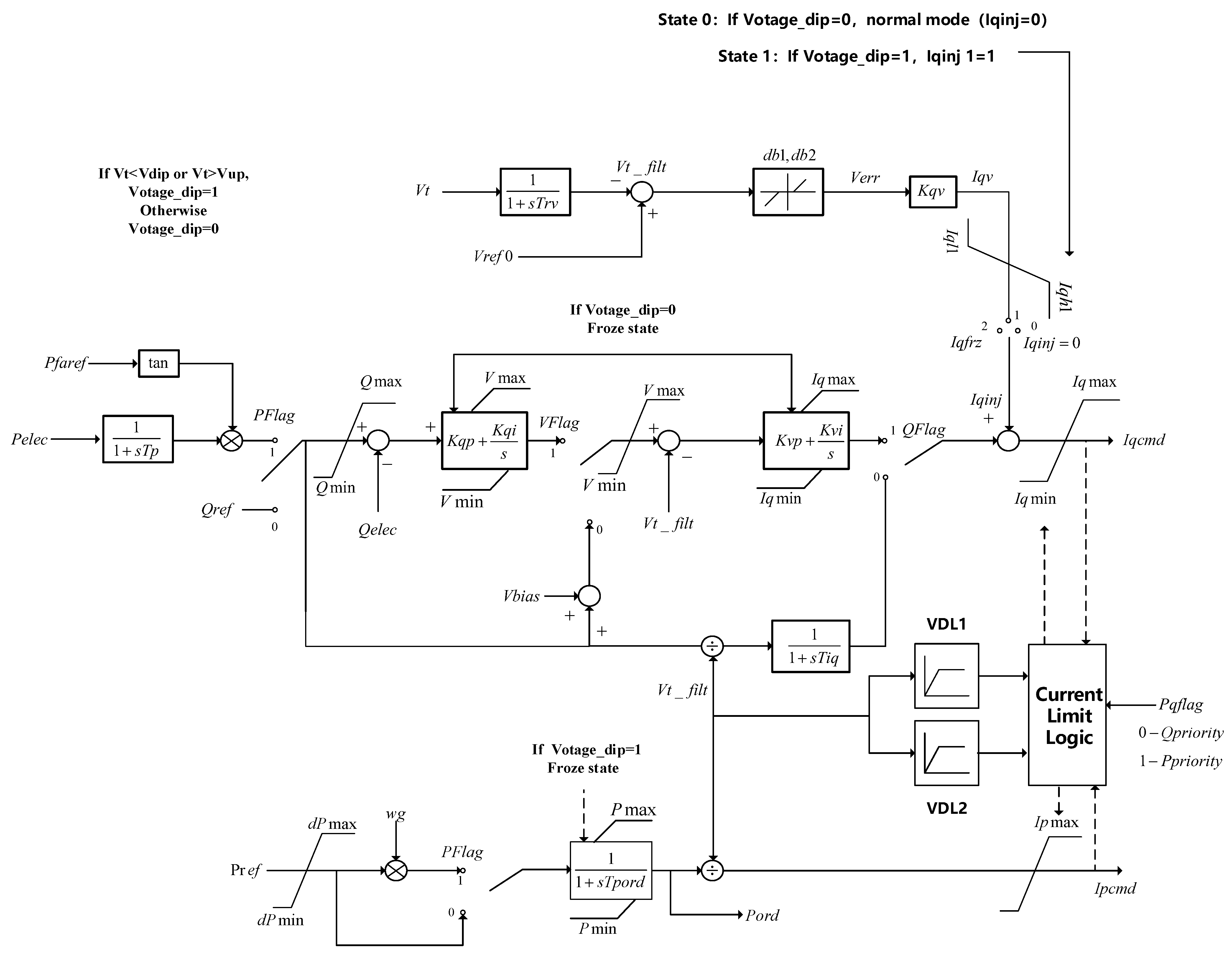
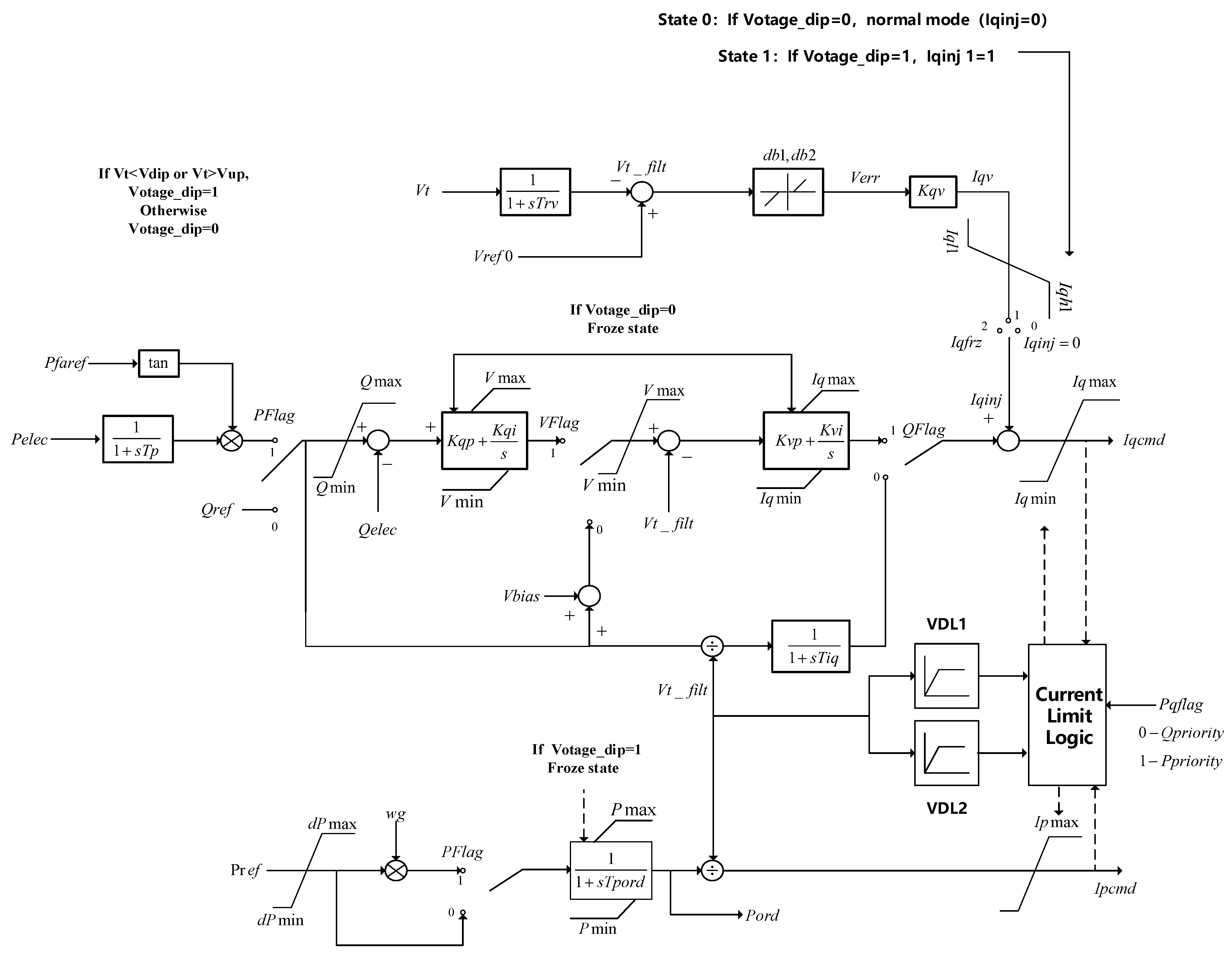
The control strategy of the electrical control module in
Figure 15 is as follows:
The electrical control module of a wind turbine plays a critical role in managing the electrical aspects of power generation. This module oversees the conversion of mechanical energy from the wind turbine into electrical energy that is compatible with the power grid. It regulates the voltage and frequency of the electricity generated to ensure it meets grid requirements. Additionally, the module optimizes the power output in response to varying wind conditions by adjusting the output current reference values (
Iqcmd and
Ipcmd). It also provides protective functions to safeguard the turbine’s electrical components from faults, overloads, and other potentially damaging conditions. By precisely controlling the electrical parameters, the module enhances the efficiency, reliability, and grid compatibility of the wind turbine’s power generation. The electrical control module receives active power reference value information (
Pref) from the torque control module, wind turbine generator speed information (
w) from the transmission module, reactive power reference value information (
Qref), and measured the reactive power information (
Qelec) and active power information (
Pelect) that wind turbine outputs. The electrical control module outputs active power command (
Pord) to the pitch angle control module, and active current reference value command (
Ipcmd) and reactive current reference value command (
Iqcmd) to the inverter module. To ensure the protection of the wind turbine model, these current reference values are regulated by the current limit logic. This logic also accounts for voltage management under fault conditions, as detailed in
Section 2.2 with the descriptions of VDL1 and VDL2. The electrical control module facilitates different control modes, such as local constant reactive power control, local constant power factor angle control, local node voltage control, and local reactive power-voltage coordinated control. These modes are activated through the toggling of various flags, with comprehensive details provided in
Section 2.2.
Some mathematical relationships for the variables are expressed as follows:
The inverter module has been introduced in the energy storage model and will not be reiterated here.
2.4. Electric Vehicle Model
In the wake of V2G technology’s advancement and deployment, electric vehicles (EVs) have rapidly evolved into a burgeoning, controllable resource on the demand side, characterized by their interruptibility and adjustability. Their incorporation into grid regulation is marked by rapid responsiveness and remarkable cost-effectiveness. Nonetheless, integrating EVs into the grid and involving them in grid management could potentially disrupt the distribution network, posing risks to its operational safety and stability. By developing a model that simulates the dynamics of EV participation in grid regulation, the capability for large-scale integration of EVs into grid adjustments is thoroughly examined. This exploration aids in crafting control strategies for EV involvement in voltage support and frequency management amidst the extensive introduction of renewable energies, aiming to bolster voltage and frequency stability, as well as enhance the distribution grid’s resilience to and recovery from faults, thereby elevating consumer satisfaction with electricity services.
The EV model proposed in this study employs a PQ grid connection control strategy to manage both the active and reactive power outputs of EVs, alongside simulating SOC management and battery protection mechanisms. Additionally, it introduces a control strategy enabling EVs to participate in voltage and frequency stabilization within the distribution grid, facilitating a seamless integration of EV charging and discharging activities with the grid’s dynamic demands. This model provides a foundational reference for the inclusion of electric vehicles in the distribution network’s regulatory framework, presenting an innovative approach to harmonizing grid operations with EV control.
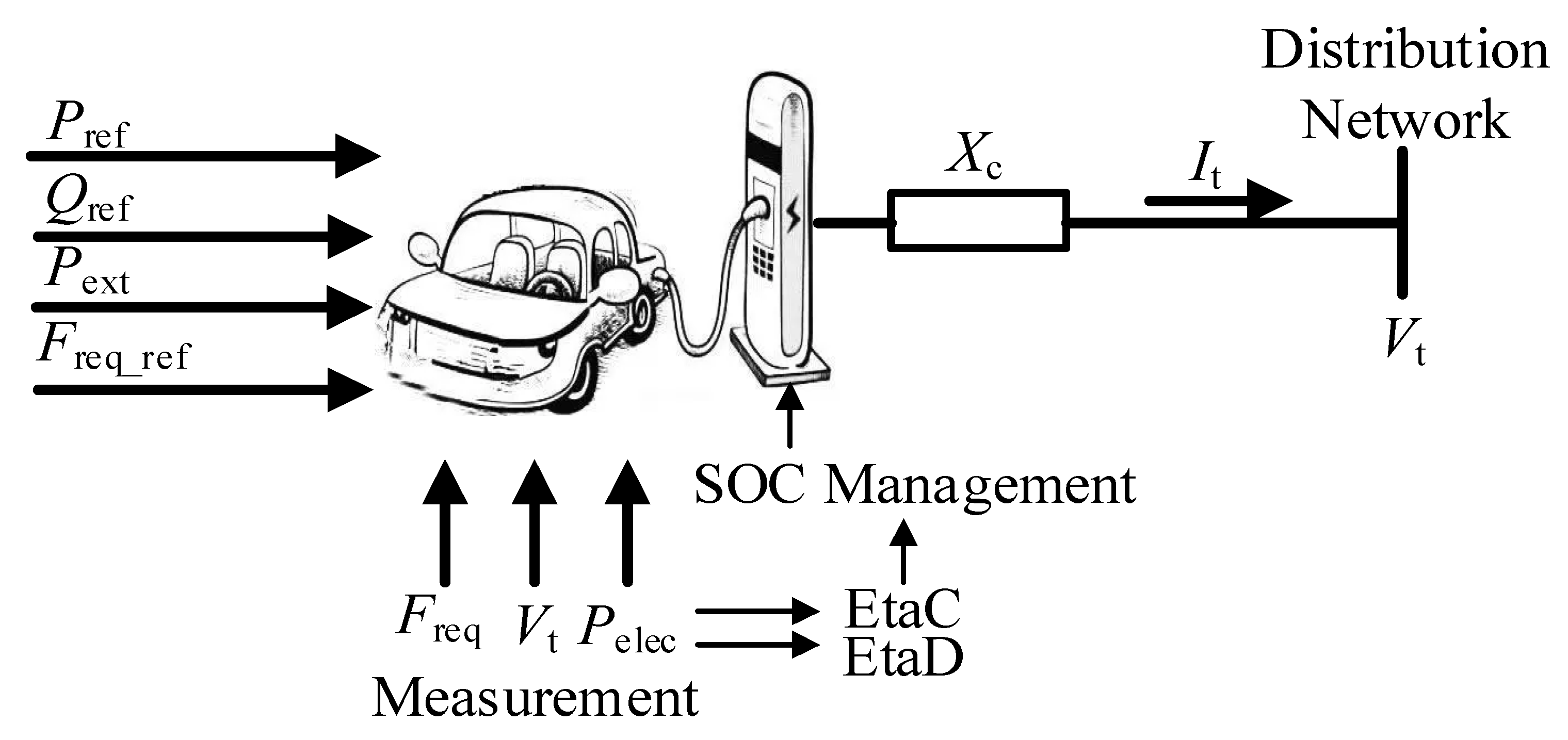
The EV model showcased in this research, as illustrated in
Figure 16, processes inputs such as active (
Pref) and reactive (
Qref) power reference values, an additional external power input (
Pext), and a frequency reference (
Freq_ref). It measures the frequency (
Freq) and voltage (
Vt) at the EV charging station’s point of grid connection, alongside the active power (
Pelec) exchange with the distribution grid. This active power, combined with information on charging (EtaC) and discharging efficiencies (EtaD), forms the foundation of the model’s SOC management system. Equipped for detailed power management, SOC regulation, and participation in voltage and frequency regulation at the PCC, this model emerges as an integral resource for bolstering grid reliability and enhancing the operational efficiency of electric vehicles.
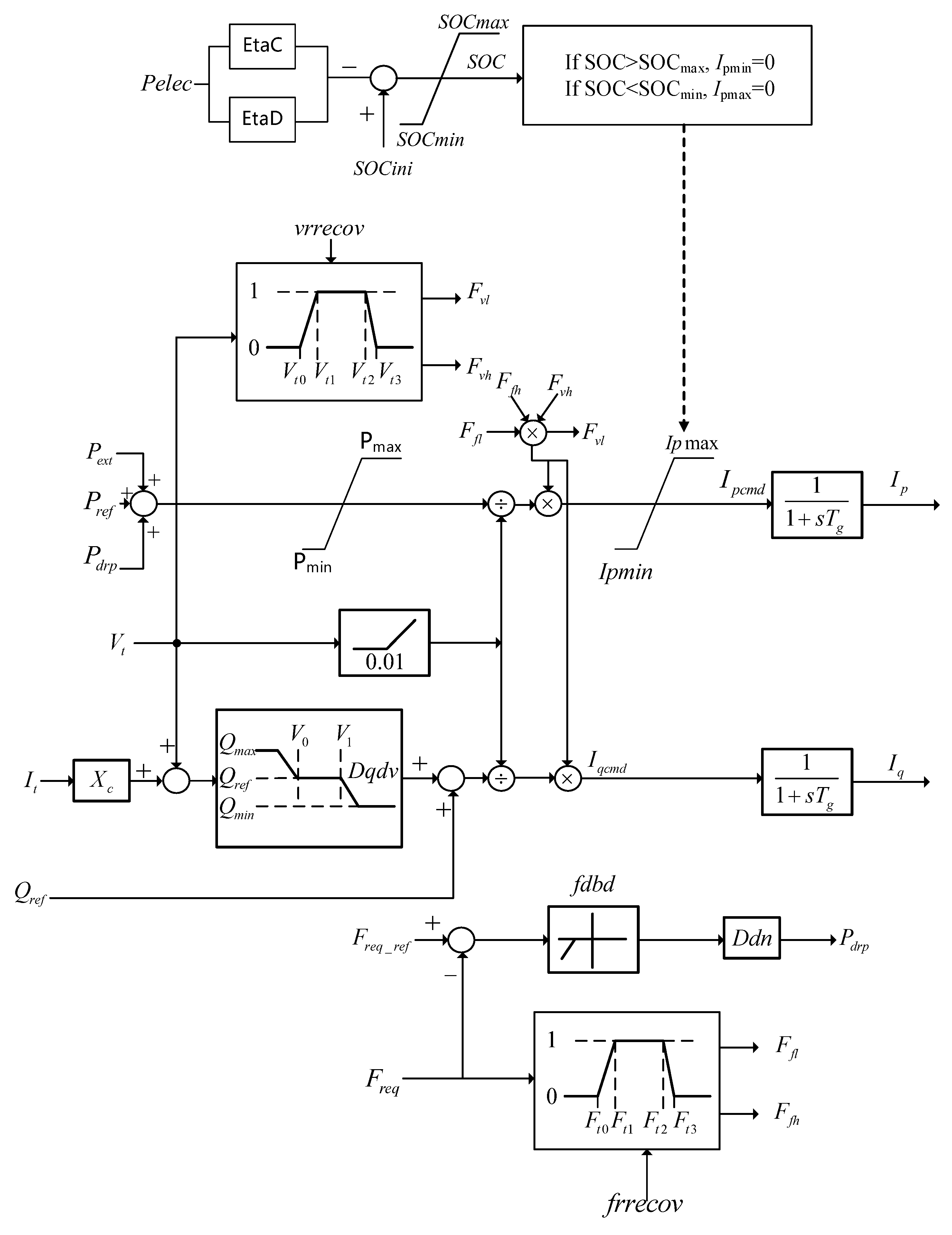
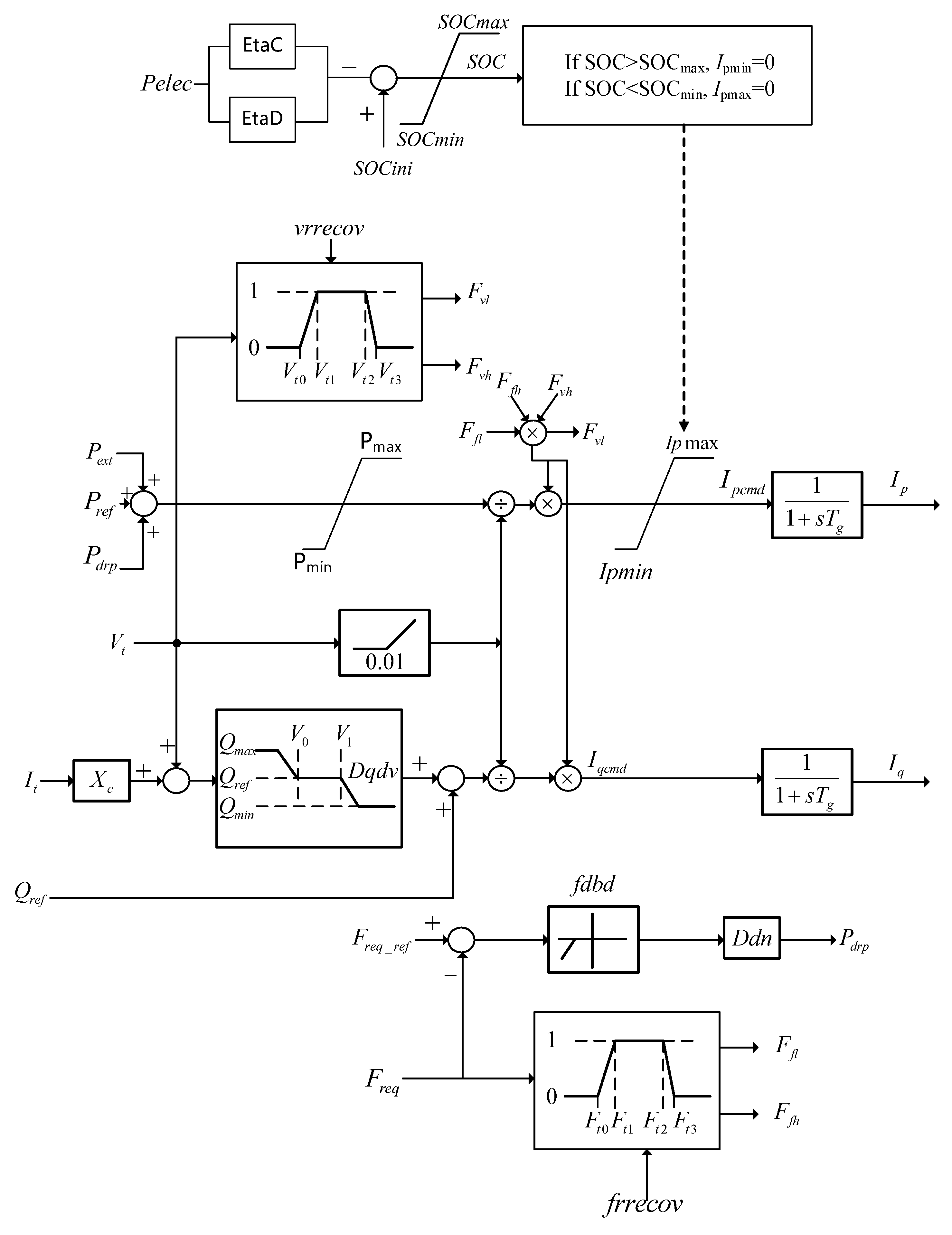
The control strategy of the electric vehicle model constructed in this paper is shown in the following
Figure 17:
The components concerning power management, engagement in voltage regulation of the distribution grid, and participation in frequency management of the grid mirror those established in the distributed photovoltaic model, and thus, will not be redundantly detailed here. As for the SOC management, the control strategy is defined as follows:
The calculation of the SOC for EVs during their charging and discharging phases is delineated in Formula (36), with SOCini denoting the EV’s initial SOC. When an EV is being charged, Pelec is assumed to be negative, which causes the SOC to rise. In contrast, when the EV is discharging, Pelec becomes positive, leading to a reduction in the SOC. Should the SOC surpass the designated maximum limit (SOCmax), the minimum threshold for the active current reference (Ipmin) is adjusted to zero, restricting the active current to only positive values and thereby halting further charging while permitting discharging. On the other hand, if the SOC drops below the minimum permissible limit (SOCmin), the maximum threshold for the active current reference (Ipmax) is reduced to zero, limiting the active current to negative values only, thus precluding further discharge and enabling charging. This regulatory strategy ensures the SOC of the EV remains within an acceptable range (SOCmin < SOC < SOCmax), effectively preventing the battery from being overcharged or over-discharged.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}