
A Coarsened-Shell-Based Cosserat Model for the Simulation of Hybrid Cables

Abstract
1. Introduction
Related Work
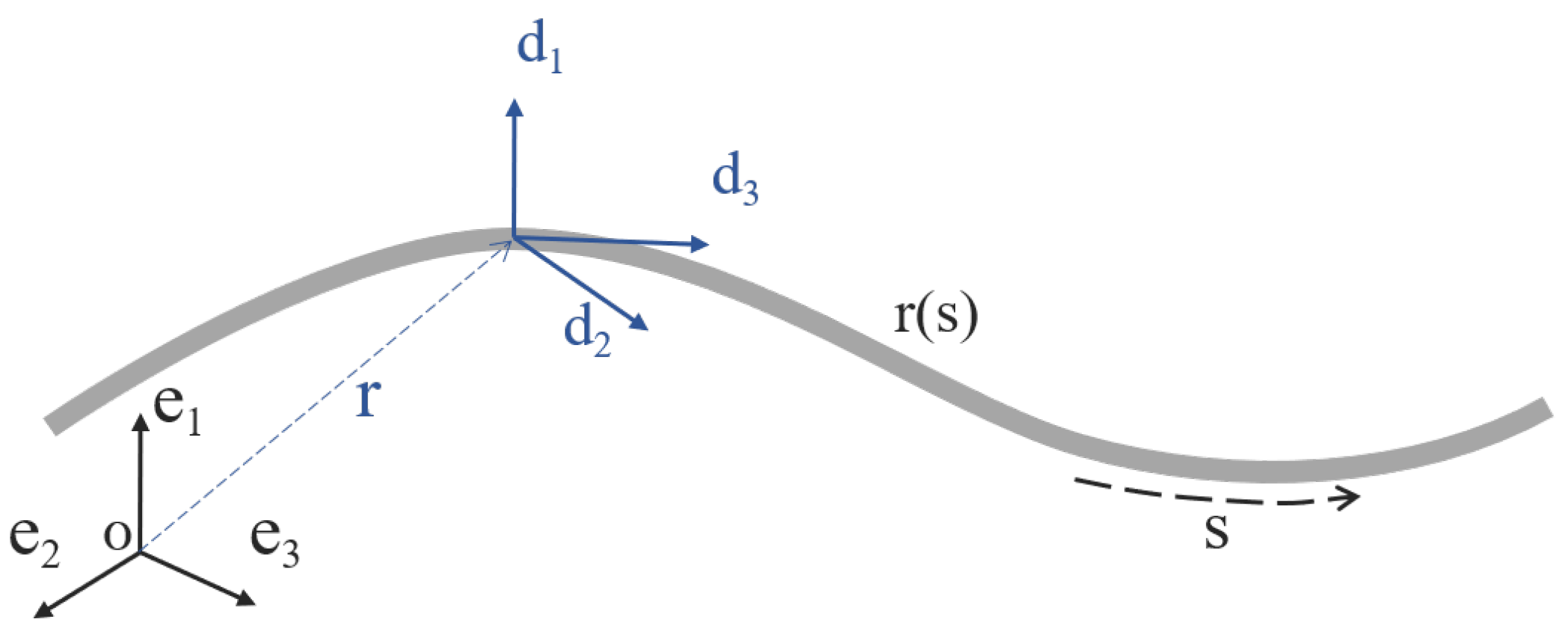
2. Cosserat Theory for Homogeneous Cable Simulation
Theory behind Cosserat Model
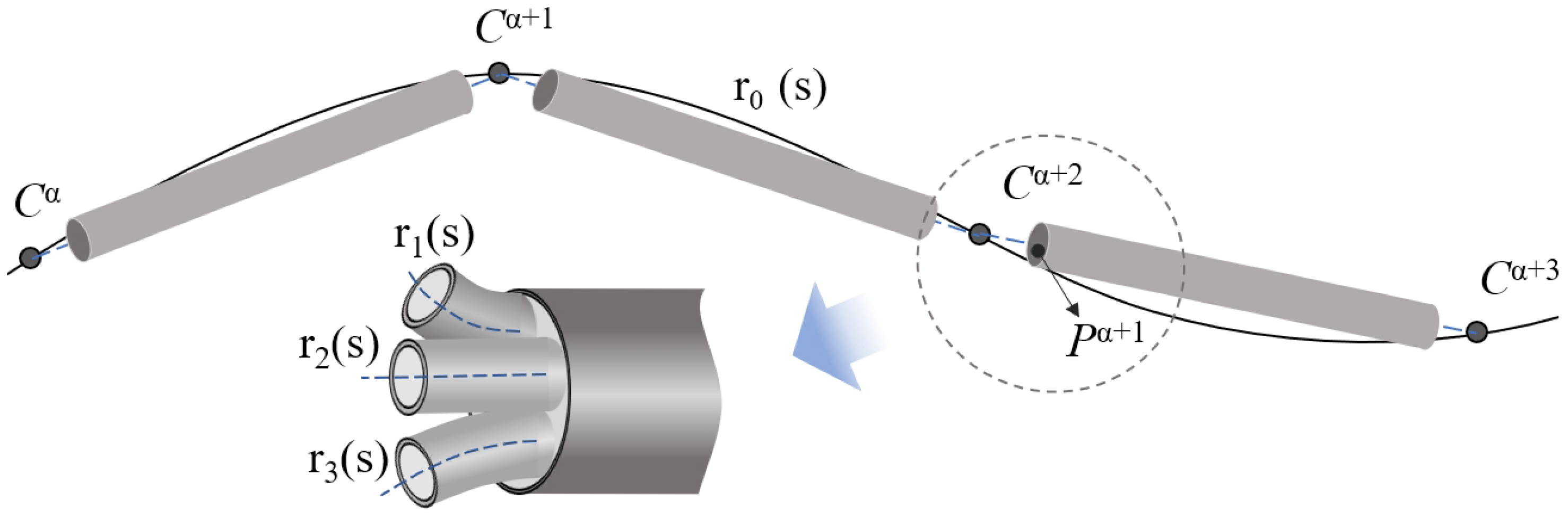
3. Coarsened-Shell-Based Cosserat Model (CSC)
3.1. Preliminaries
3.2. Shell Simulation Procedure
3.3. Coarsened-Shell Shape Functions
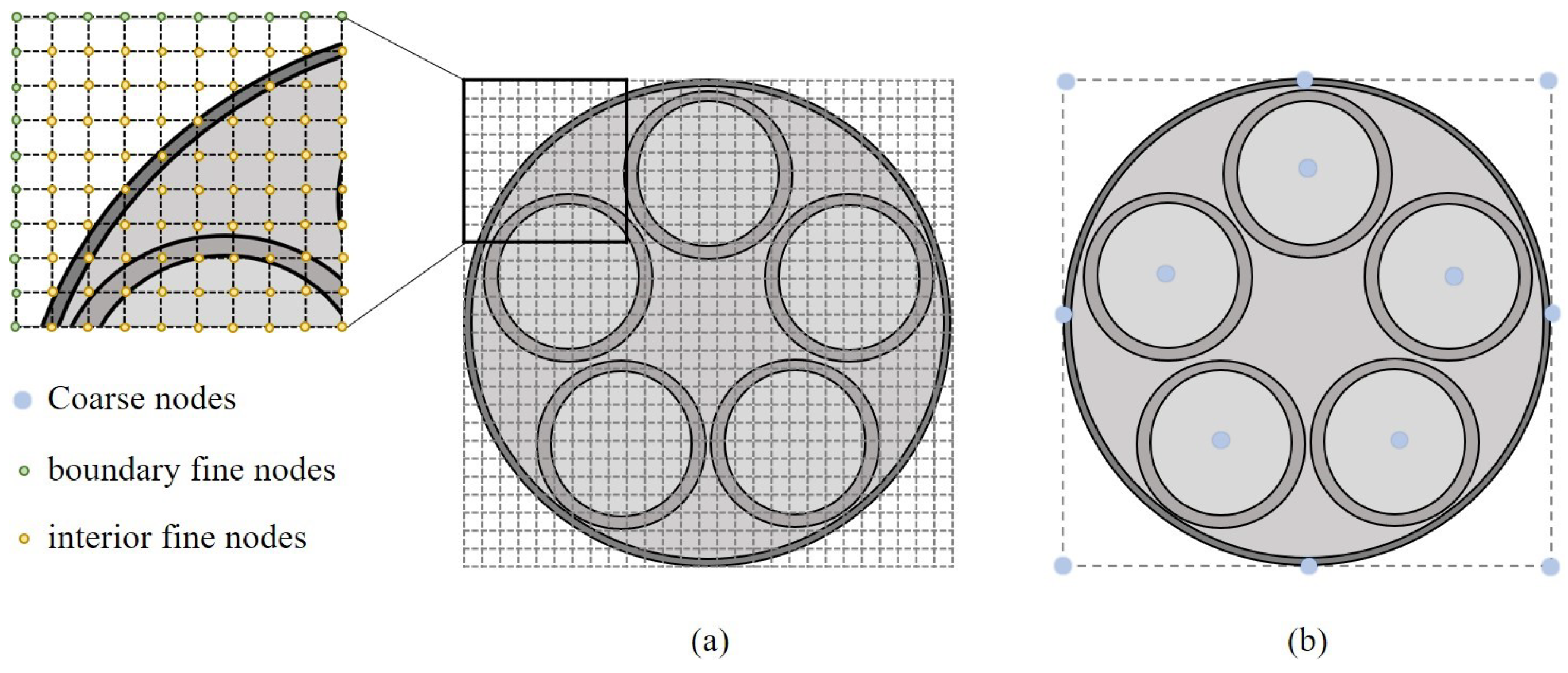
4. Numerical Construction of Coarsened-Shell Shape Functions
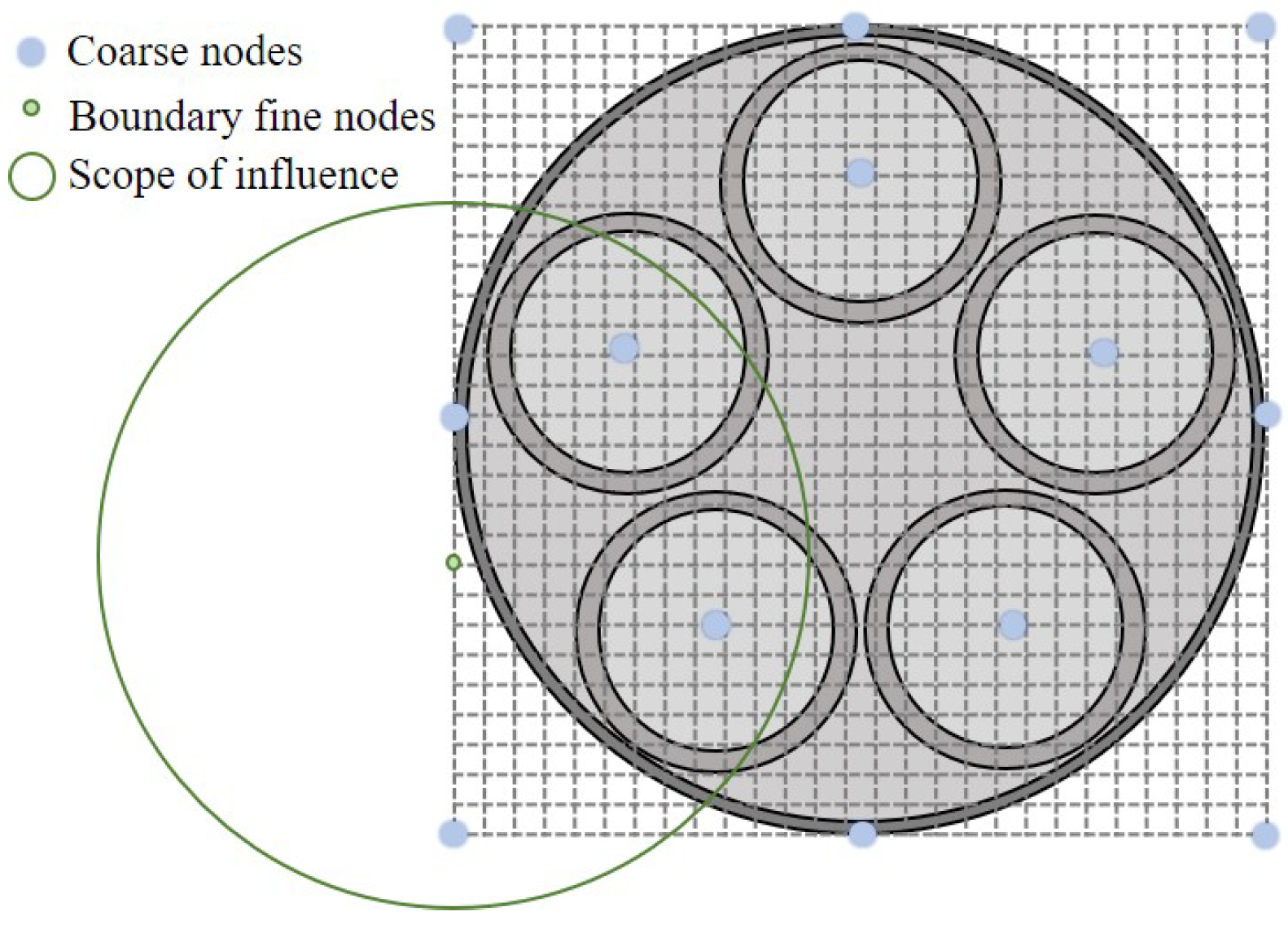
4.1. MLS Interpolation Matrix
4.2. Shell Transformation Matrix
4.3. Usage of Coarsened-Shell Shape Functions in Hybrid Cable Simulation
4.4. Properties of Coarsened-Shell Shape Functions
5. Numerical Examples
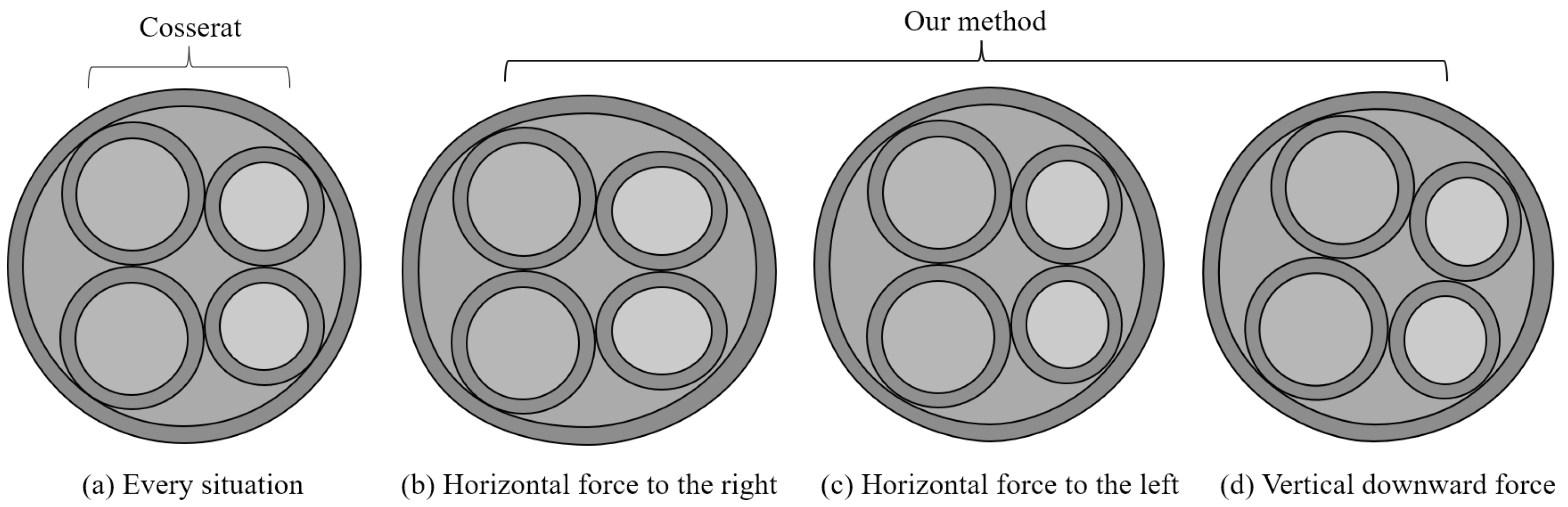
5.1. Comparative Analysis of Same Types of Cables
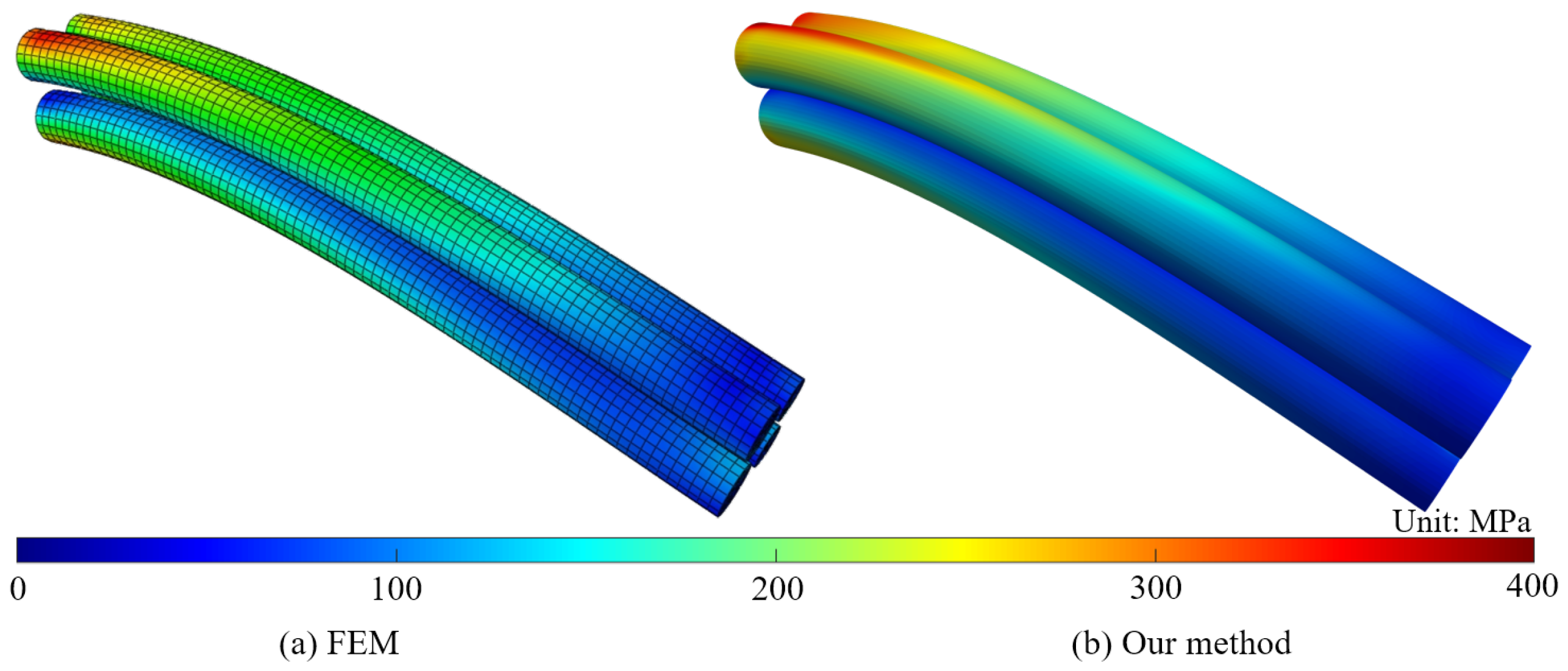
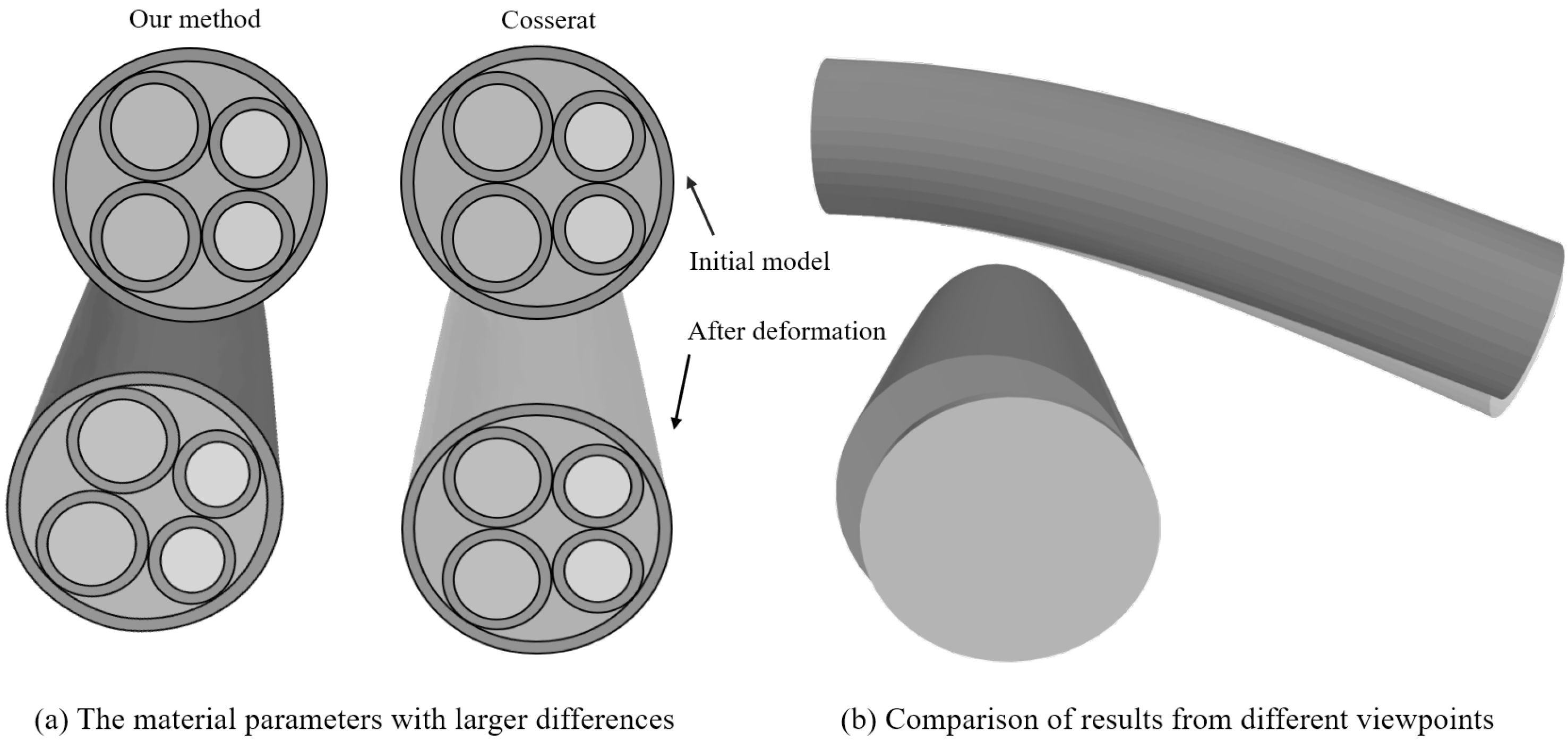
5.2. Comparative Analysis of Different Types of Cables
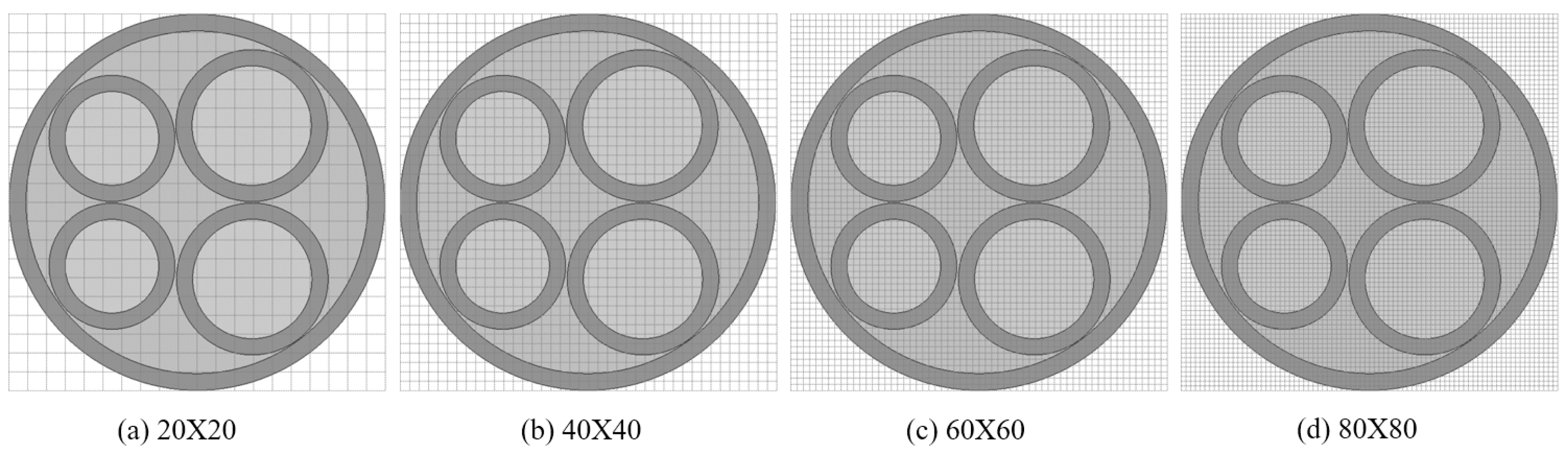
5.3. Performance at Different Mesh Settings
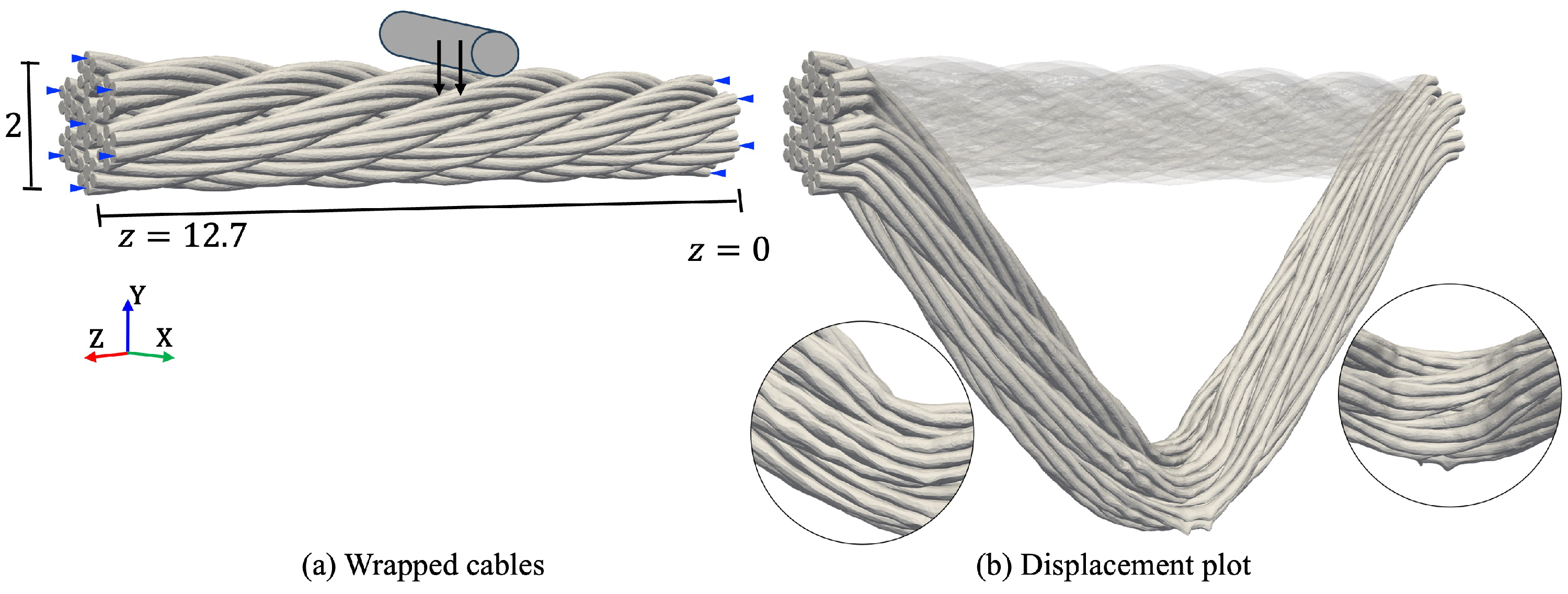
5.4. Complex Wrapped Cables
6. Conclusions and Prospects
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pai, D. STRANDS: Interactive Simulation of Thin Solids using Cosserat Models. Comput. Graph. Forum 2010, 21, 347–352. [Google Scholar] [CrossRef]
- Spillmann, J.; Teschner, M. CoRdE: Cosserat rod elements for the dynamic simulation of one-dimensional elastic objects. In Proceedings of the Symposium on Computer Animation, San Diego, CA, USA, 2–4 August 2007. [Google Scholar]
- Spillmann, J.; Teschner, M. Cosserat Nets. IEEE Trans. Vis. Comput. Graph. 2009, 15, 325–338. [Google Scholar] [CrossRef] [PubMed]
- Wojtan, C.; Zhao, C.; Lin, J.; Wang, T.; Bao, H.; Huang, J. Efficient and Stable Simulation of Inextensible Cosserat Rods by a Compact Representation. Comput. Graph. Forum 2022, 41, 567–578. [Google Scholar]
- Bergou, M.; Wardetzky, M.; Robinson, S.; Audoly, B.; Grinspun, E. Discrete elastic rods. In ACM SIGGRAPH 2008 Papers; ACM: New York, NY, USA, 2008; Volume 63, pp. 1–12. [Google Scholar]
- Weidner, N.; Kyle, P.; Levin, D.; Shinjiro, S. Eulerian-on-lagrangian cloth simulation. ACM Trans. Graph. 2018, 37, 1–11. [Google Scholar] [CrossRef]
- Linn, J.; Dreler, K. Discrete Cosserat Rod Models Based on the Difference Geometry of Framed Curves for Interactive Simulation of Flexible Cables. In Math for the Digital Factory; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Smit, R.; Brekelmans, W.; Meijer, H. Prediction of the mechanical behavior of nonlinear heterogeneous systems by multi-level finite element modeling. Comput. Methods Appl. Mech. Eng. 1998, 155, 181–192. [Google Scholar] [CrossRef]
- Chen, J.; Bao, H.; Wang, T.; Desbrun, M.; Huang, J. Numerical coarsening using discontinuous shape functions. ACM Trans. Graph. 2018, 37, 1–12. [Google Scholar] [CrossRef]
- Grégoire, M.; Schömer, E. Interactive simulation of one-dimensional flexible parts. Comput.-Aided Des. 2007, 39, 694–707. [Google Scholar] [CrossRef]
- Baraff, D. Large Steps in Cloth Simulation. In Proceedings of the 25th Annual Conference on Computer Graphics and Interactive Techniques, Orlando, FL, USA, 19–24 July 1998. [Google Scholar]
- Lv, N.; Liu, J.; Xia, H.; Ma, J.; Yang, X. A review of techniques for modeling flexible cables. Comput.-Aided Des. 2020, 122, 102826. [Google Scholar] [CrossRef]
- Hermansson, T.; Bohlin, R.; Carlson, J.; Söderberg, R. Automatic assembly path planning for wiring harness installations. J. Manuf. Syst. 2013, 32, 417–422. [Google Scholar] [CrossRef]
- Stumpp, T.; Spillmann, J.; Becker, M.; Teschner, M. A Geometric Deformation Model for Stable Cloth Simulation. In Proceedings of the Workshop on Virtual Reality Interactions & Physical Simulations, Grenoble, France, 11–12 November 2008. [Google Scholar]
- Celniker, G.; Gossard, D. Deformable curve and surface finite-elements for free-form shape design. ACM Siggraph Comput. Graph. 1991, 25, 257–266. [Google Scholar] [CrossRef]
- Hergenrther, E.; Dhne, P.; Rundeturmstr, R. Real-Time Virtual Cables Based on Kinematic Simulation. In Proceedings of the International Conference in Central Europe on Computer Graphics and Visualization, Plzen, Czech Republic, 7–10 February 2000. [Google Scholar]
- Lv, N.; Liu, J.; Ding, X.; Lin, H. Assembly simulation of multi-branch cables. J. Manuf. Syst. 2017, 45, 201–211. [Google Scholar] [CrossRef]
- Nordenholz, T.; O’Reilly, O. On steady motions of isotropic, elastic Cosserat points. IMA J. Appl. Math. 1998, 60, 55–72. [Google Scholar] [CrossRef]
- Wen, J.; Chen, J.; Umetani, N.; Bao, H.; Huang, J. Cosserat Rod with rh-Adaptive Discretization. Comput. Graph. Forum 2020, 39, 143–154. [Google Scholar] [CrossRef]
- Du, H.; Jiang, Q.; Xiong, W. Computer-assisted assembly process planning for the installation of flexible cables modeled according to a viscoelastic Cosserat rod model. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2023, 237, 1737–1747. [Google Scholar] [CrossRef]
- Landau, L.; Lifshitz, E. Electrodynamics of Continuous Media; Butterworth Heinemann: Oxford, UK, 1984. [Google Scholar]
- Li, H.; Leow, W.; Chiu, I. Elastic Tubes: Modeling Elastic Deformation of Hollow Tubes. Comput. Graph. Forum 2010, 29, 1770–1782. [Google Scholar] [CrossRef]
- Arne, W.; Marheineke, N.; Meister, A.; Wegener, R. Numerical analysis of Cosserat rod and string models for viscous jets in rotational spinning processes. Math. Model. Methods Appl. Sci. 2011, 20, 1941–1965. [Google Scholar] [CrossRef]
- Li, M.; Hu, J. Analysis of heterogeneous structures of non-separated scales using curved bridge nodes. Comput. Methods Appl. Mech. Eng. 2022, 392, 114582. [Google Scholar] [CrossRef]
- Xia, L.; Breitkopf, P. Design of materials using topology optimization and energy-based homogenization approach in Matlab. Struct. Multidiscip. Optim. 2015, 52, 1229–1241. [Google Scholar] [CrossRef]
- Andreassen, E.; Andreasen, C. How to determine composite material properties using numerical homogenization. Comput. Mater. Sci. 2014, 83, 488–495. [Google Scholar] [CrossRef]
- Sigmund, O. Materials with prescribed constitutive parameters: An inverse homogenization problem. Int. J. Solids Struct. 1994, 31, 2313–2329. [Google Scholar] [CrossRef]
- Ventsel, E.; Krauthammer, T.; Carrera, E. Thin plates and shells: Theory, analysis, and applications. Appl. Mech. Rev. 2002, 55, B72–B73. [Google Scholar] [CrossRef]
- Liu, D.; Cao, D.; Wang, H. Computational Cosserat Dynamics in MEMS Component Modelling. In Proceedings of the 4th Pan American Congress on Computational Mechanics (WCCM-PANACM), Vancouver, BC, Canada, 21–26 July 2004. [Google Scholar]
- Villaggio, P. Mathematical Models for Elastic Structures; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Love, A.E.H. A Treatise on the Mathematical Theory of Elasticity; Dover Publications: Mineola, NY, USA, 1944. [Google Scholar]
- Gould, T.; Burton, D.A. A Cosserat rod model with microstructure. New J. Phys. 2006, 8, 137. [Google Scholar] [CrossRef]
- Press, W.; Teukolsky, S.; Vettering, W.; Flannery, B. Numerical Recipes in C/C++: The Art of Scientific Computing Code. Eur. J. Phys. 2003, 24, 329–330. [Google Scholar] [CrossRef]
- Hughes, T.; Cottrell, J.; Bazilevs, Y. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Comput. Methods Appl. Mech. Eng. 2005, 194, 4135–4195. [Google Scholar] [CrossRef]
- Özis, T.; Esen, A.; Kutluay, S. Numerical solution of Burgers’ equation by quadratic B-spline finite elements. Appl. Math. Comput. 2005, 165, 237–249. [Google Scholar] [CrossRef]
- Steffen, M.; Wallstedt, P.; Guilkey, J.; Kirby, R.; Berzins, M. Examination and analysis of implementation choices within the material point method (MPM). Comput. Model. Eng. Sci. 2008, 31, 107–127. [Google Scholar]
- Lancaster, P.; Salkauskas, K. Surfaces generated by moving least squares methods. Math. Comput. 1981, 37, 141–158. [Google Scholar] [CrossRef]
- Belytschko, T.; Krongauz, Y.; Organ, D.; Fleming, M.; Krysl, P. Meshless methods: An overview and recent developments. Comput. Methods Appl. Mech. Eng. 1996, 139, 3–47. [Google Scholar] [CrossRef]
- Kiendl, J.; Bletzinger, K.; Linhard, J.; Wüchner, R. Isogeometric shell analysis with Kirchhoff–Love elements. Comput. Methods Appl. Mech. Eng. 2009, 198, 3902–3914. [Google Scholar] [CrossRef]
- Zienkiewicz, O.; Taylor, R.; Zhu, J. The Finite Element Method: Its Basis and Fundamentals; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Melenk, J.; Babuska, I. The partition of unity finite element method: Basic theory and applications. Comput. Methods Appl. Mech. Eng. 1996, 139, 289–314. [Google Scholar] [CrossRef]
- Nesme, M.; Kry, P.; Jeřábková, L.; Faure, F. Preserving topology and elasticity for embedded deformable models. ACM Trans. Graph. 2009, 28, 52. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
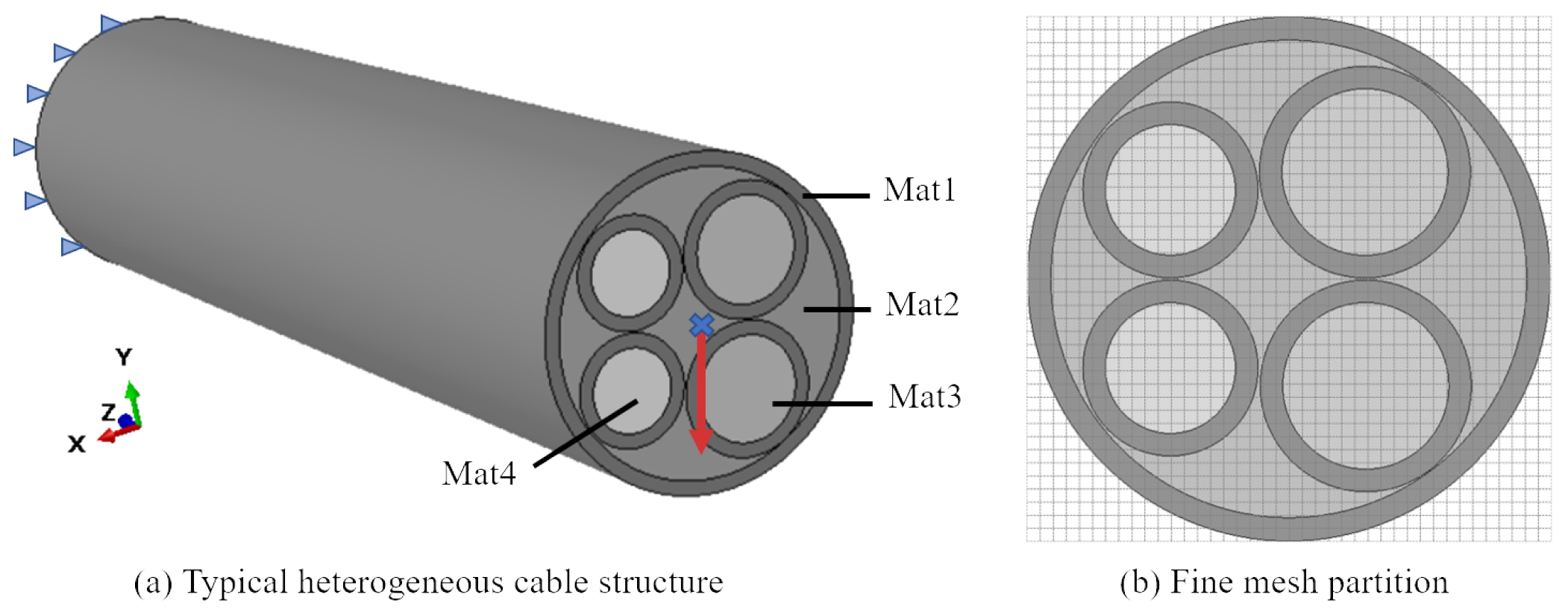
| Index | Material | Young’s Modulus | Poisson’s Ratio |
|---|---|---|---|
| Mat1 | rubber | 789 | 0.47 |
| Mat2 | nylon | 1.4 × 103 | 0.37 |
| Mat3 | copper alloy | 1.06 × 105 | 0.39 |
| Mat4 | aluminium alloy | 7.1 × 104 | 0.33 |
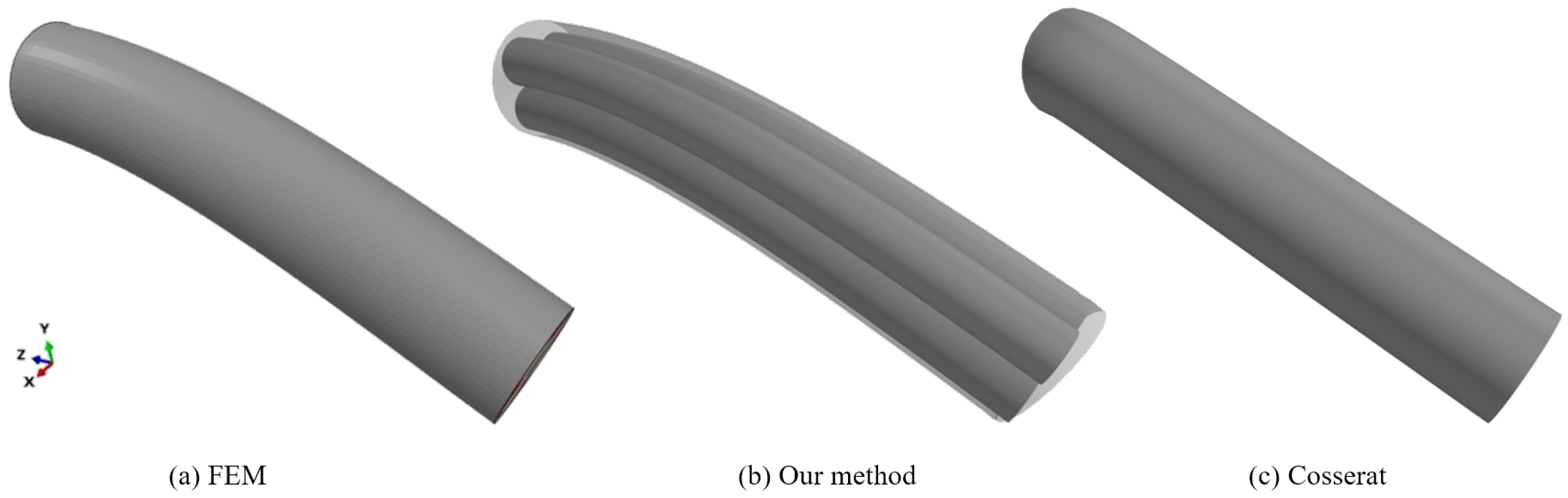
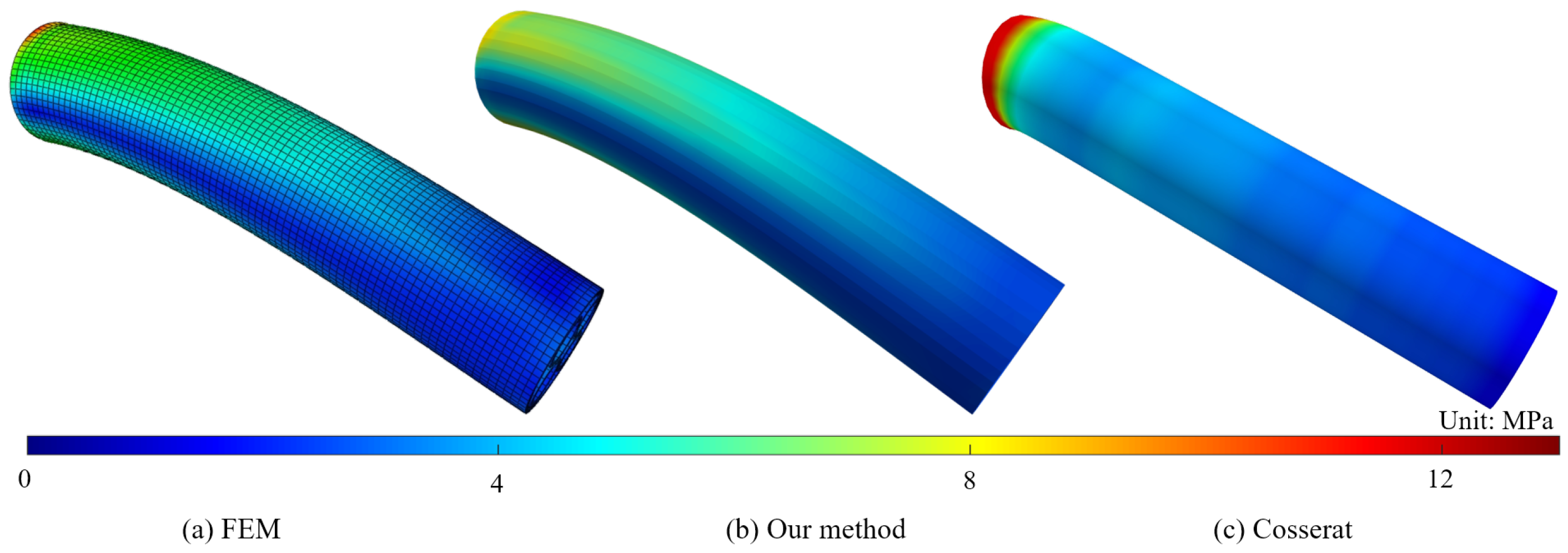
| Simulation Method | Displacement Error | Elapsed Time (s) |
|---|---|---|
| FEM | - | 15.2 |
| Our method | 0.16 | 9.7 |
| Cosserat | 1.01 | 4.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, F.; Wang, P.; Zhang, Q.; Chen, W.; Li, M.; Fang, Q. A Coarsened-Shell-Based Cosserat Model for the Simulation of Hybrid Cables. Electronics 2024, 13, 1645. https://doi.org/10.3390/electronics13091645
Yang F, Wang P, Zhang Q, Chen W, Li M, Fang Q. A Coarsened-Shell-Based Cosserat Model for the Simulation of Hybrid Cables. Electronics. 2024; 13(9):1645. https://doi.org/10.3390/electronics13091645
Chicago/Turabian StyleYang, Feng, Ping Wang, Qiong Zhang, Wei Chen, Ming Li, and Qiang Fang. 2024. "A Coarsened-Shell-Based Cosserat Model for the Simulation of Hybrid Cables" Electronics 13, no. 9: 1645. https://doi.org/10.3390/electronics13091645
APA StyleYang, F., Wang, P., Zhang, Q., Chen, W., Li, M., & Fang, Q. (2024). A Coarsened-Shell-Based Cosserat Model for the Simulation of Hybrid Cables. Electronics, 13(9), 1645. https://doi.org/10.3390/electronics13091645