
A Study on Fractional Power-Law Applications and Approximations

 ,
, 


Abstract
1. Introduction
2. Power-Law Functions
2.1. First-Order Power-Law Filters
2.2. Power-Law Lead/Lag Compensators
3. Approximation Techniques
3.1. Curve-Fitting Approximation Using MATLAB
3.2. Padé Approximation
3.3. Charef Approximation
3.4. Carlson Approximation
3.5. Continued Fraction Expansion (CFE)-Based Techniques
4. Comparison of Power-Law Function Approximation Techniques
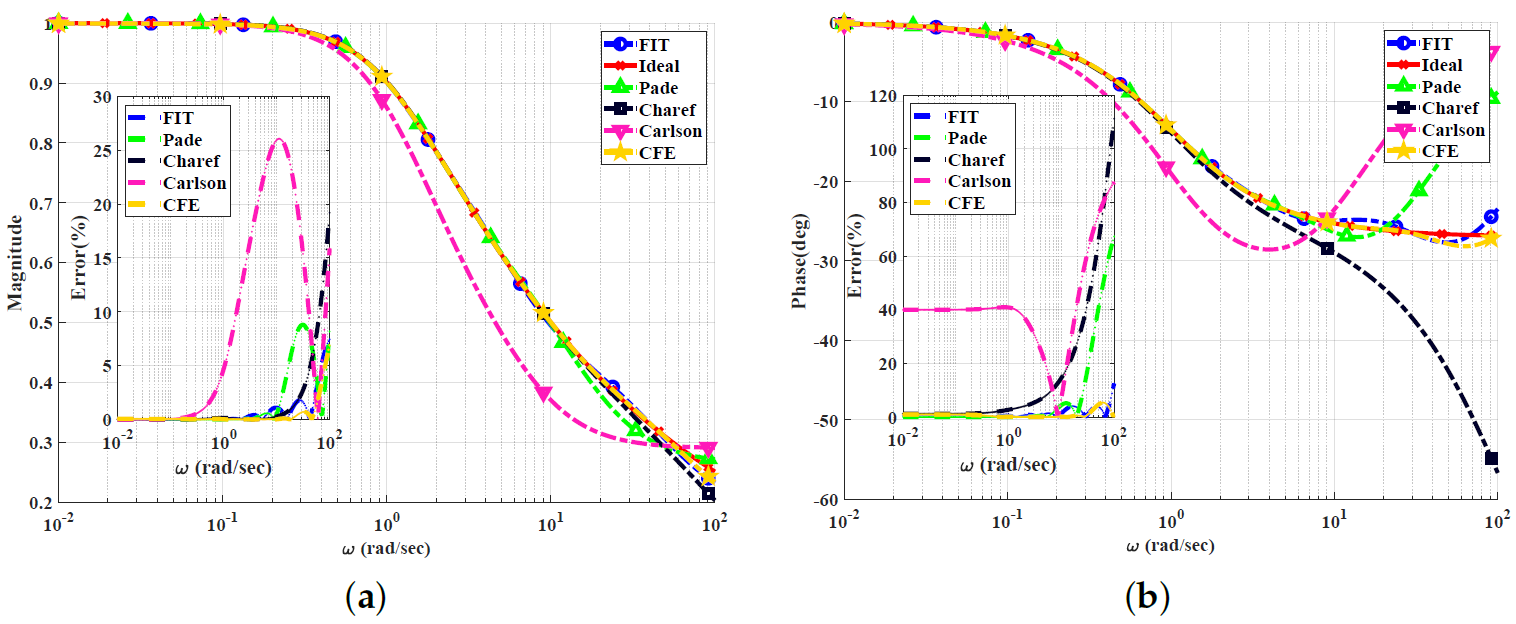
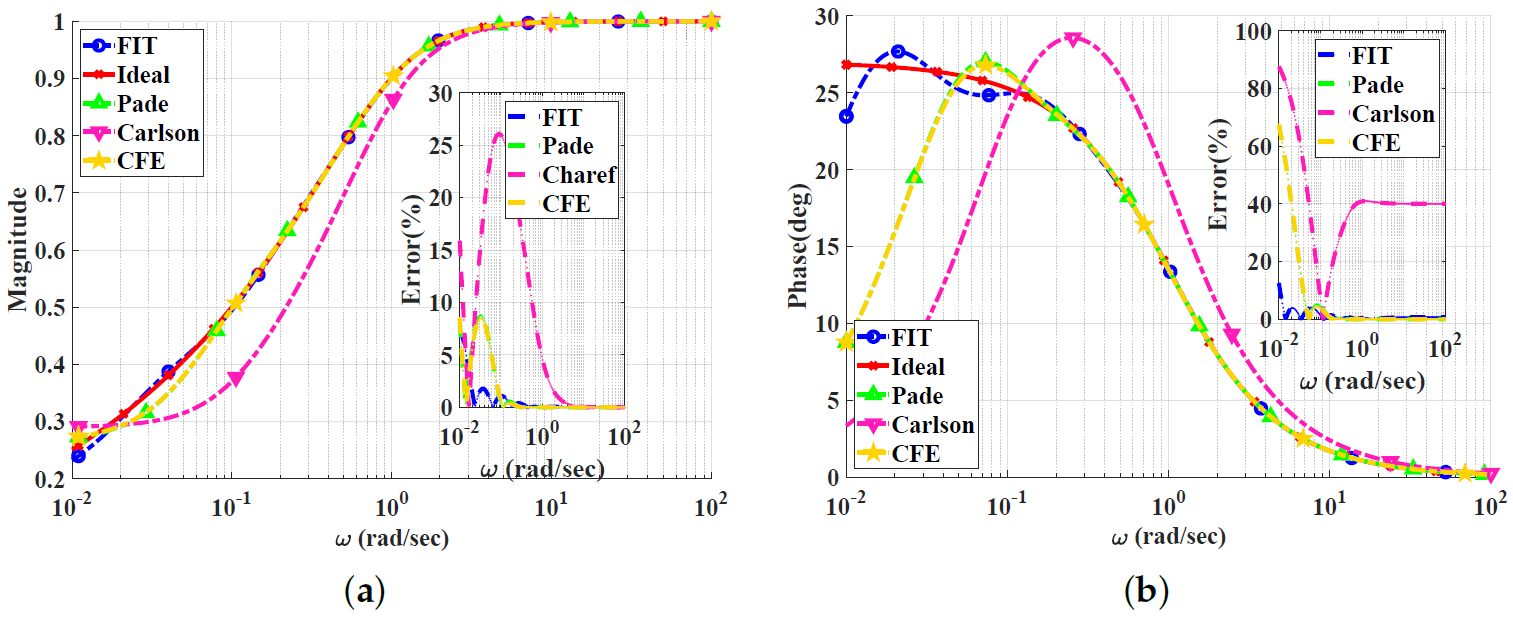
4.1. low-pass power-law Filter
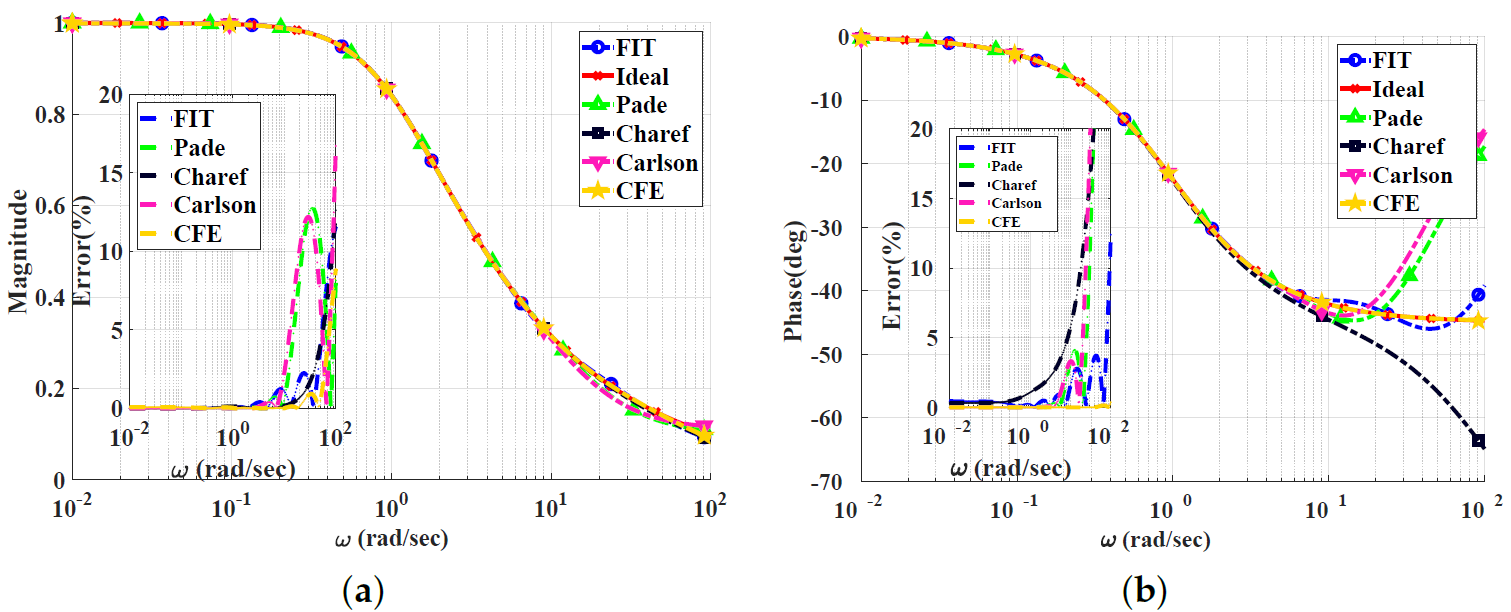
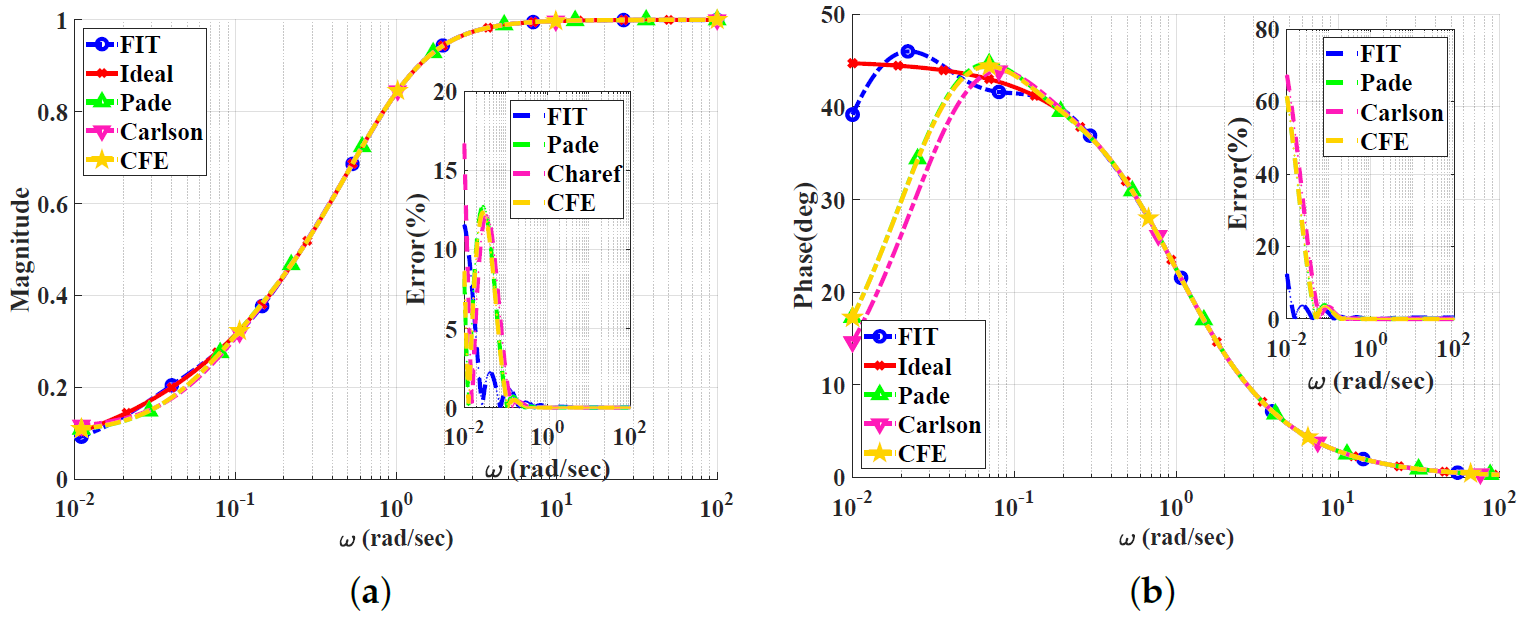
4.2. high-pass power-law Filter
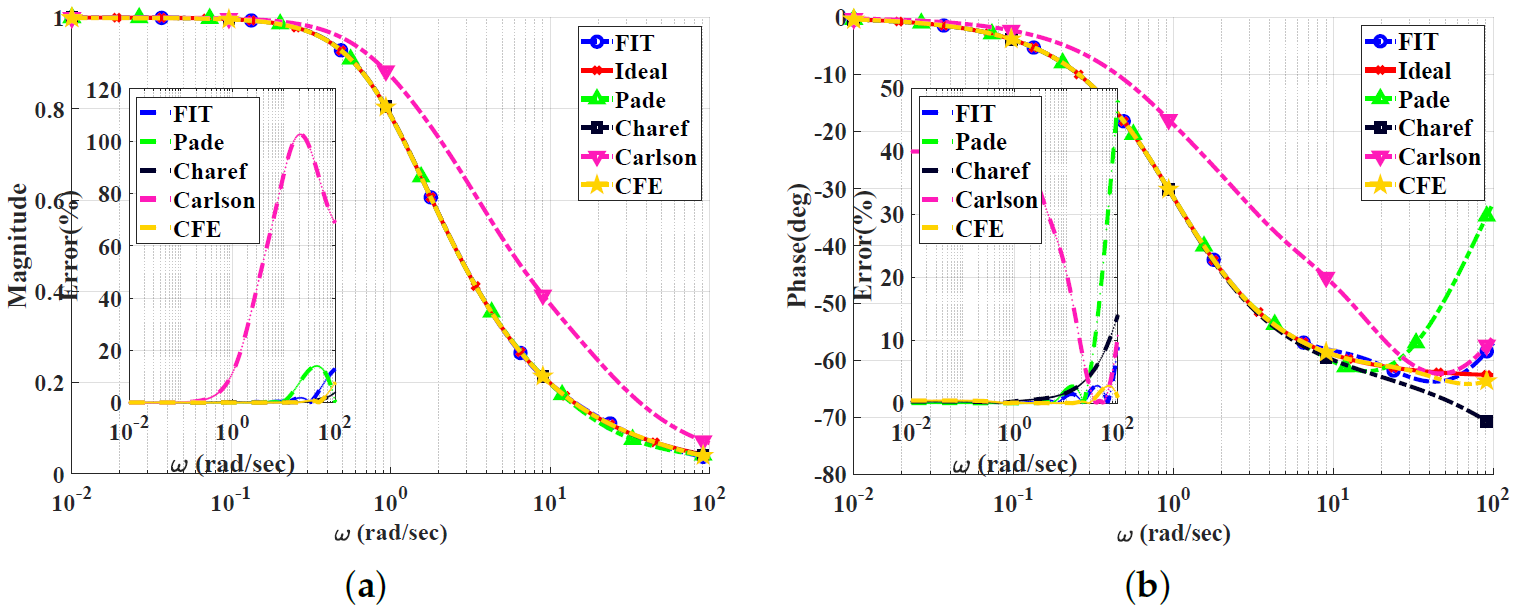
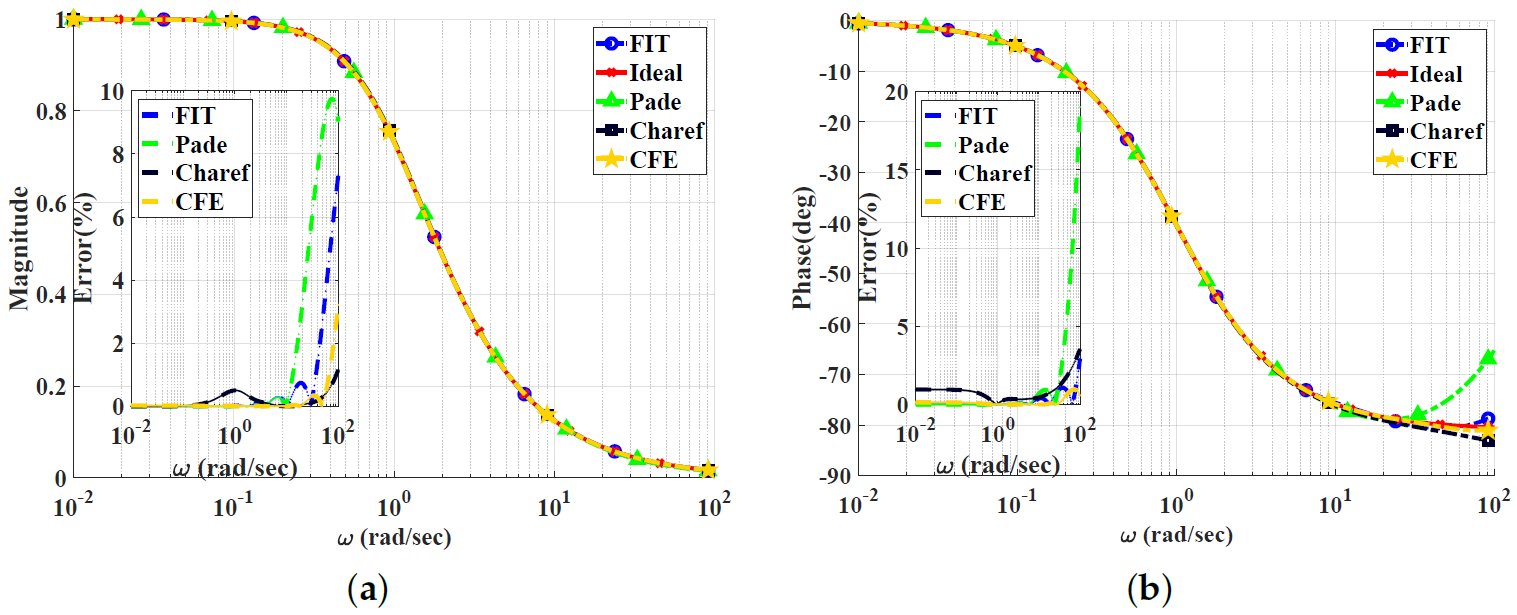
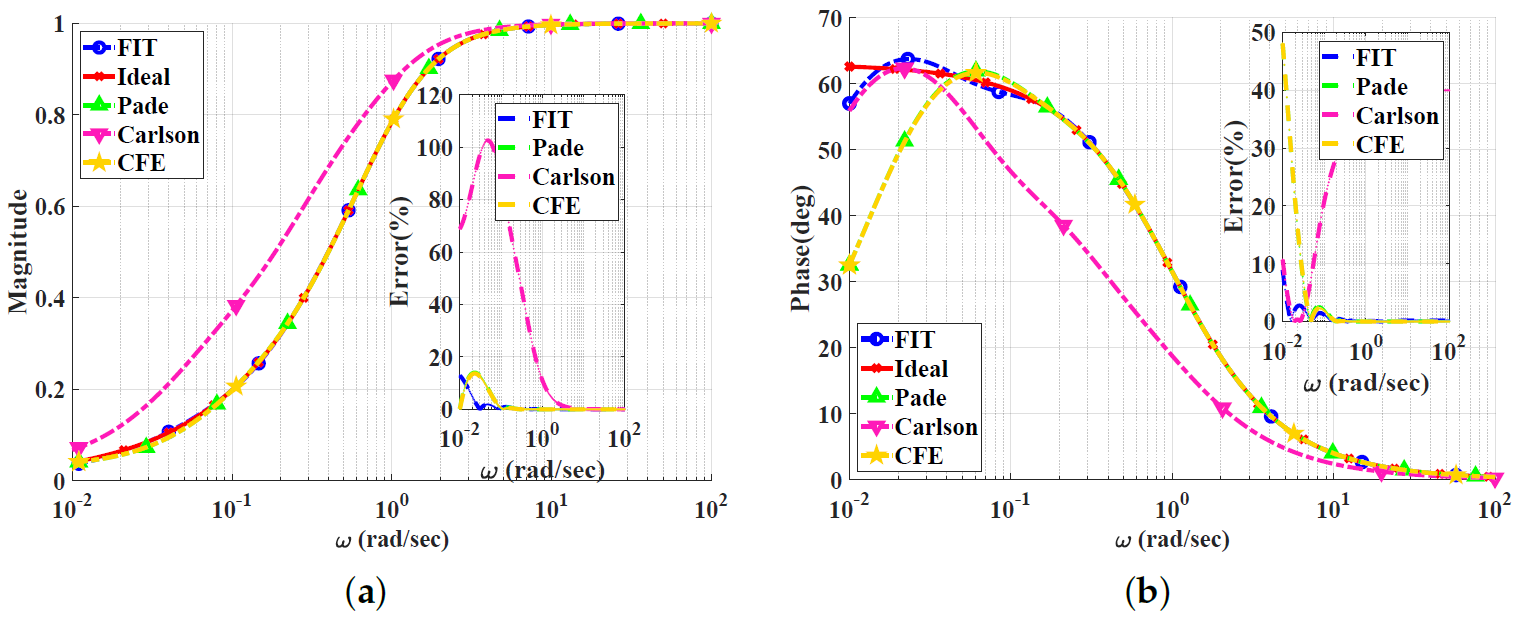
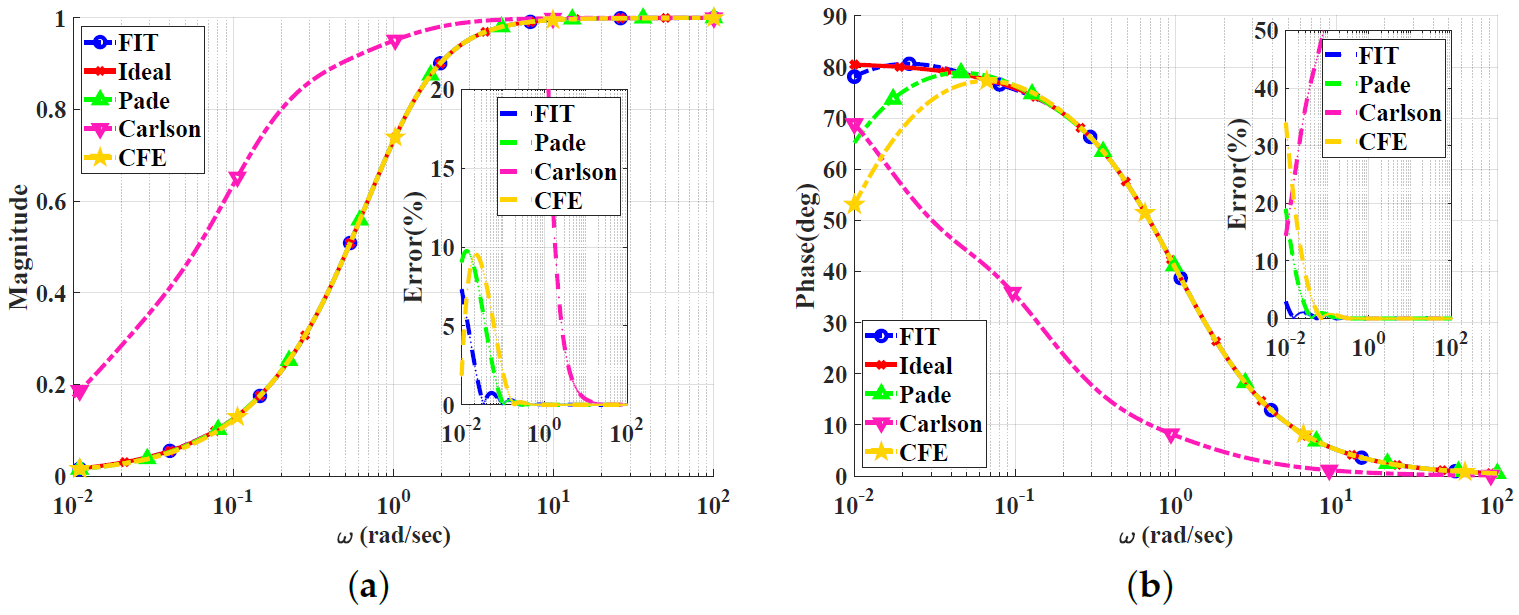
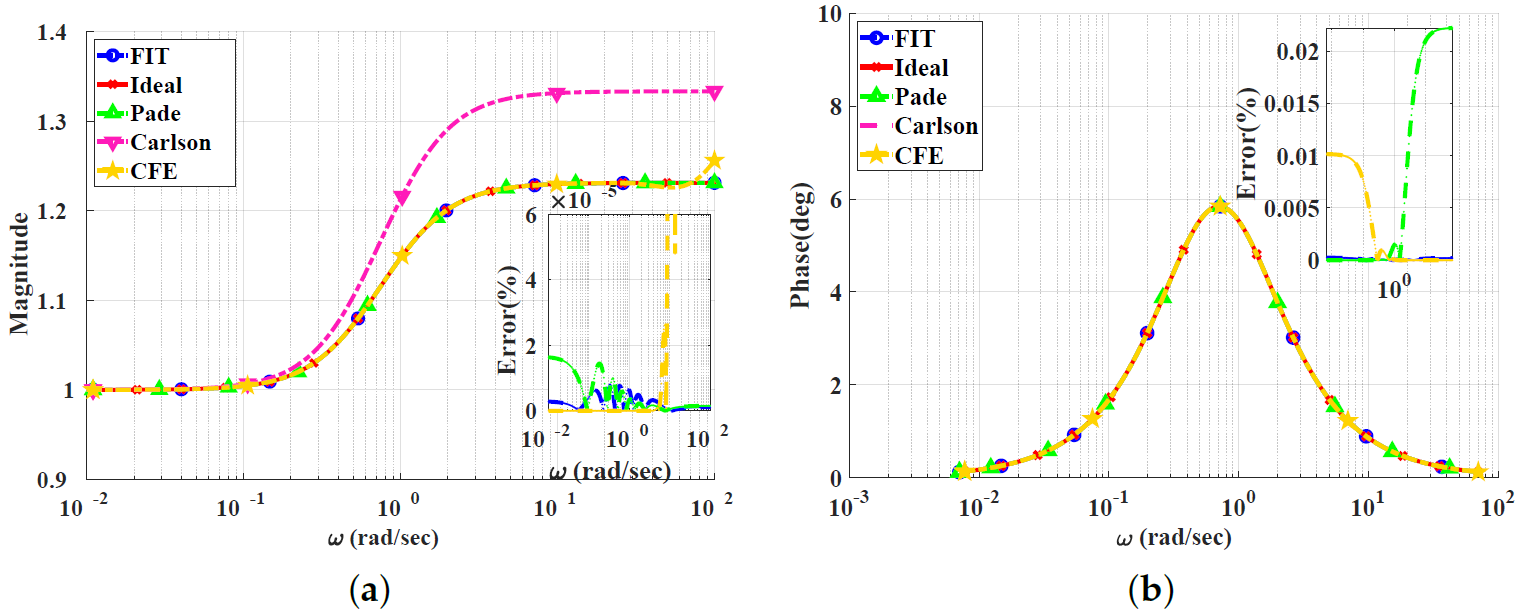
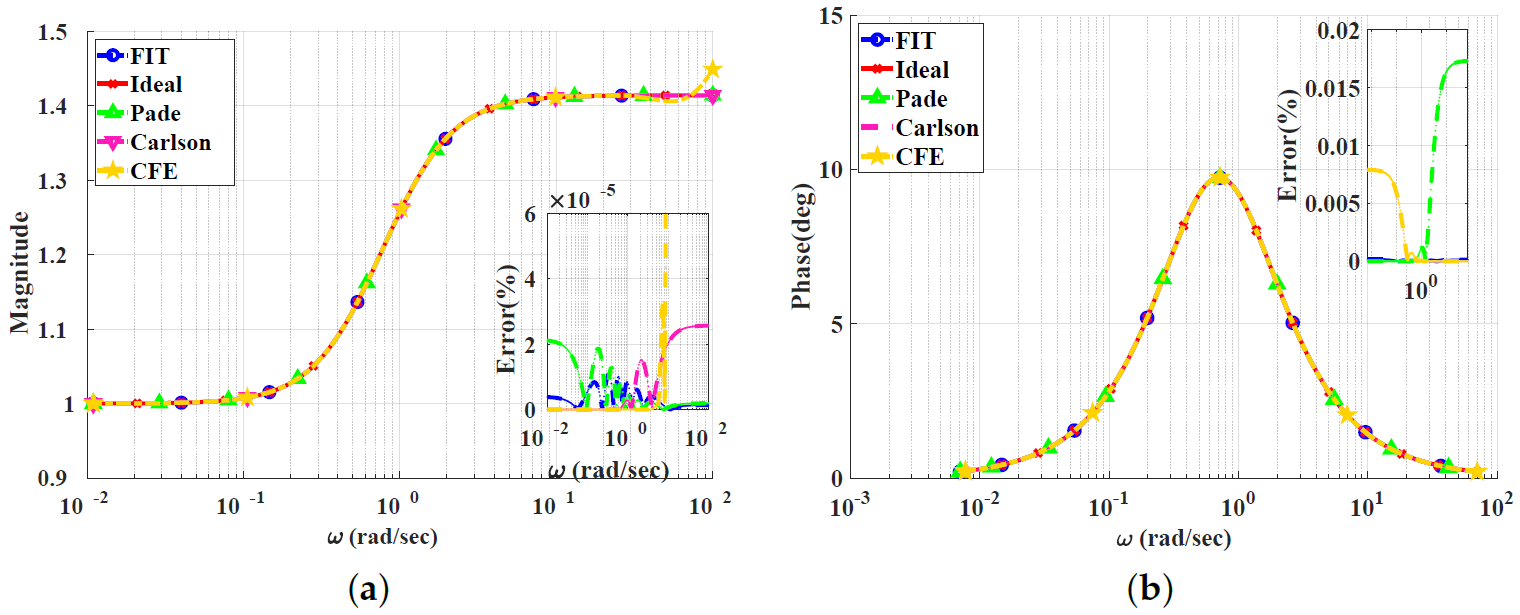
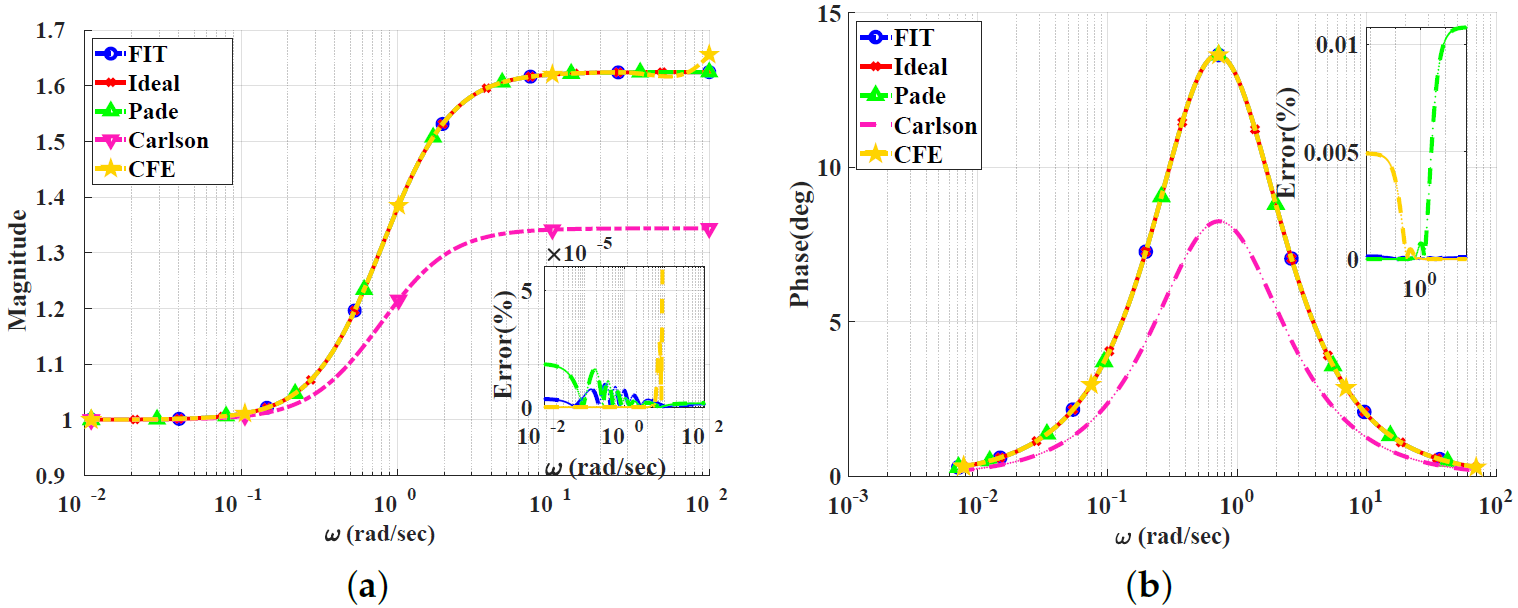
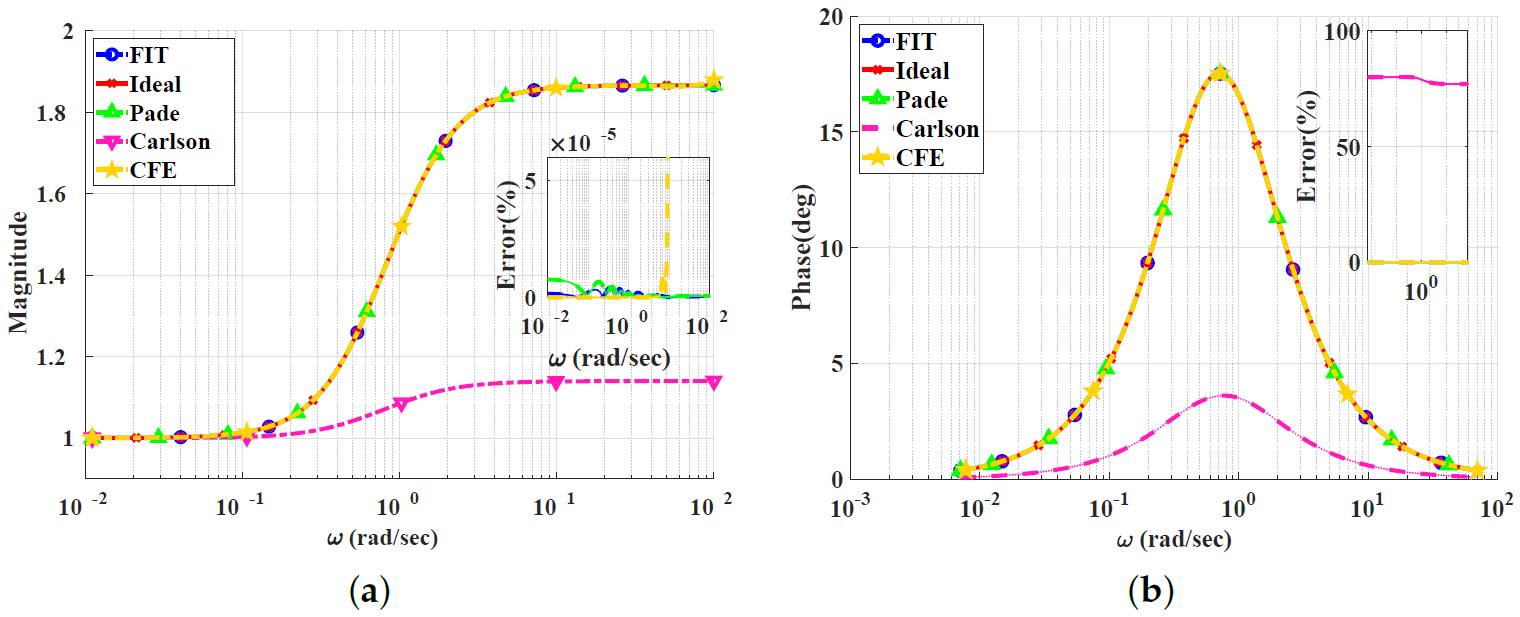
4.3. Power-Law Lead/Lag Compensator
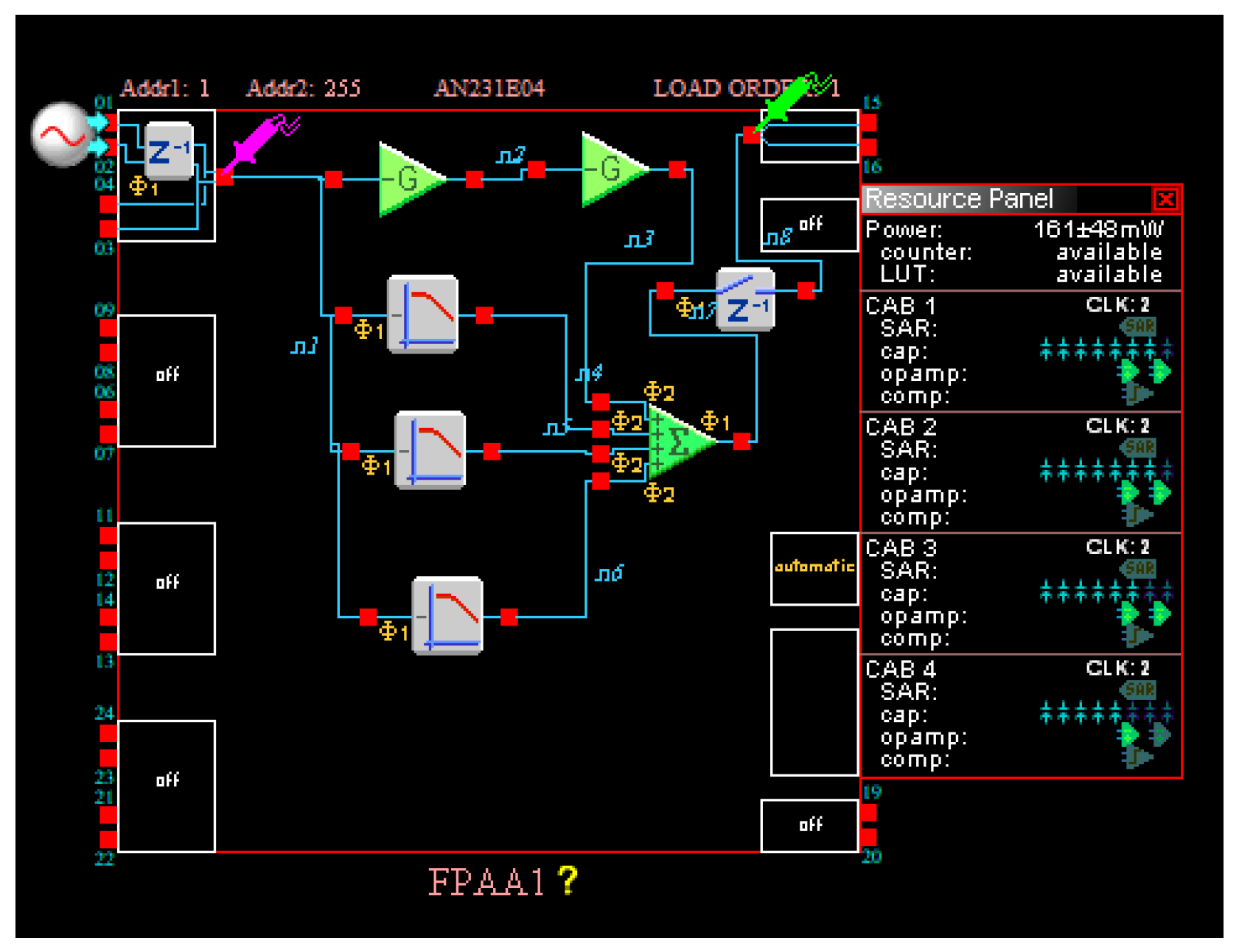
5. FPAA Implementation
5.1. Converting the Transfer Functions for Implementation on the FPAA
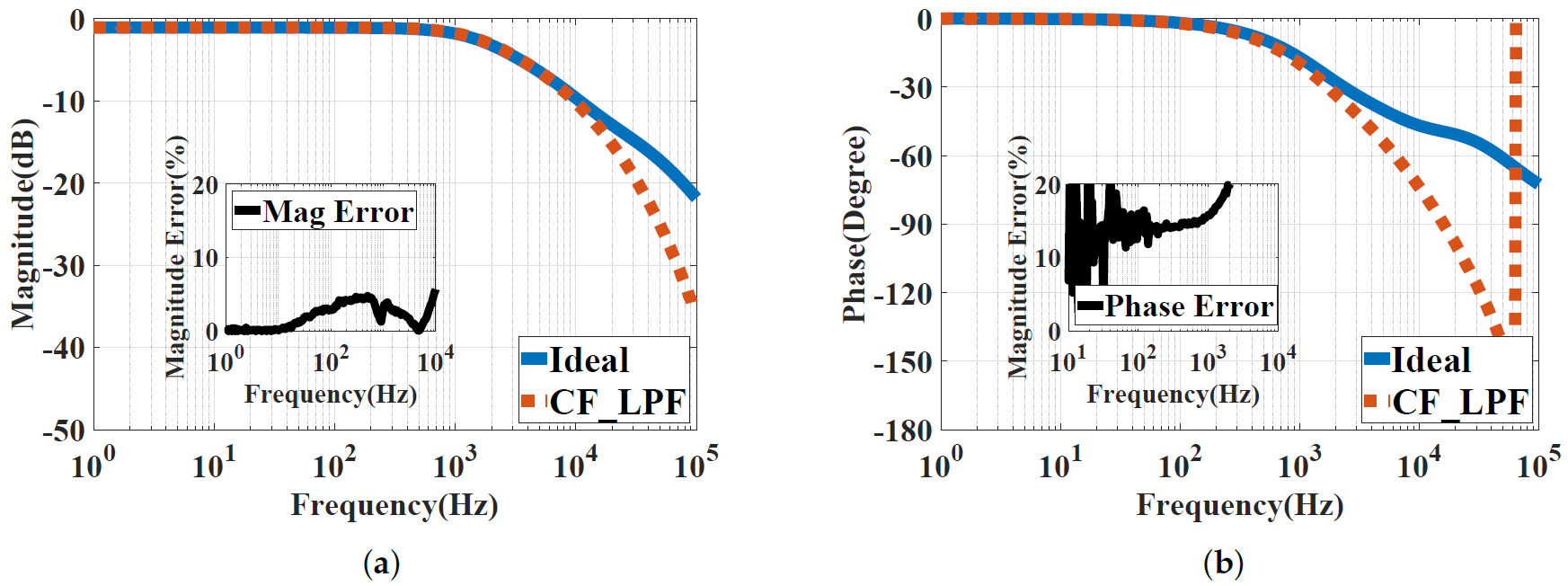
5.2. Curve-Fitting-Based Implementation for low-pass power-law Filters
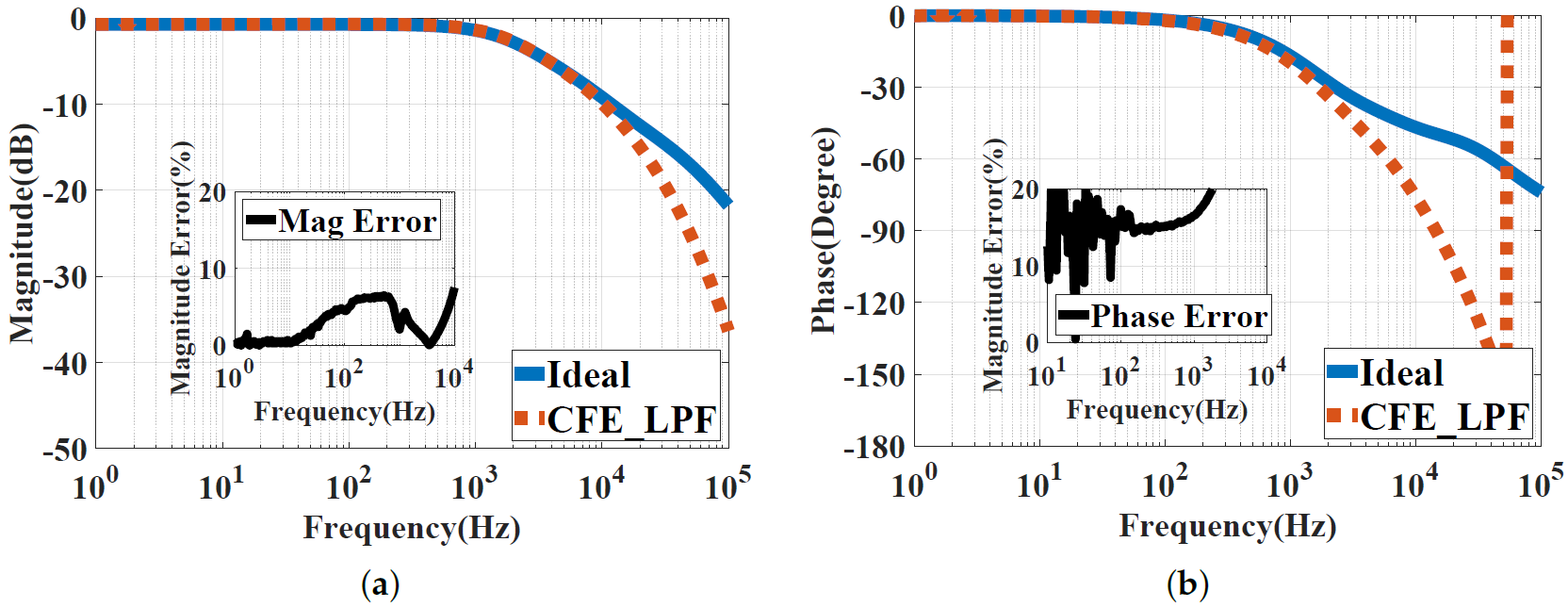
5.3. CFE-Based Implementation for low-pass power-law Filters
5.4. Lead Compensator FPAA Implementation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Luo, Y.; Chen, Y. Fractional Order Motion Controls; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Bošković, M.Č.; Rapaić, M.R.; Šekara, T.B.; Mandić, P.D.; Lazarević, M.P.; Cvetković, B.; Lutovac, B.; Daković, M. On the rational representation of fractional order lead compensator using Padé approximation. In Proceedings of the 2018 7th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 10–14 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–4. [Google Scholar]
- Tsirimokou, G.; Psychalinos, C.; Elwakil, A. Design of CMOS Analog Integrated Fractional-Order Circuits: Applications in Medicine and Biology; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Xue, D. Fractional-Order Control Systems: Fundamentals and Numerical Implementations; Walter de Gruyter GmbH & Co KG: Berlin/Heidelberg, Germany, 2017; Volume 1. [Google Scholar]
- Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. Versatile Field-Programmable Analog Array Realizations of Power-Law Filters. Electronics 2022, 11, 692. [Google Scholar] [CrossRef]
- Hamed, E.M.; Said, L.A.; Madian, A.H.; Radwan, A.G. On the approximations of CFOA-based fractional-order inverse filters. Circuits Syst. Signal Process. 2020, 39, 2–29. [Google Scholar] [CrossRef]
- Monje, C.; Ramos, F.; Feliu, V.; Vinagre, B. Tip position control of a lightweight flexible manipulator using a fractional order controller. IET Control. Theory Appl. 2007, 1, 1451–1460. [Google Scholar] [CrossRef]
- Dutta, P.; Horn, P. Low-frequency fluctuations in solids: 1 f noise. Rev. Mod. Phys. 1981, 53, 497. [Google Scholar] [CrossRef]
- Sun, H.H.; Onaral, B. A Unified Approach to Represent Metal Electrode Polarization. IEEE Trans. Biomed. Eng. 1983, BME-30, 399–406. [Google Scholar] [CrossRef] [PubMed]
- Charef, A.; Sun, H.; Tsao, Y.; Onaral, B. Fractal system as represented by singularity function. IEEE Trans. Autom. Control 1992, 37, 1465–1470. [Google Scholar] [CrossRef]
- Kapoulea, S.; Tsirimokou, G.; Psychalinos, C.; Elwakil, A.S. Employment of the Padé approximation for implementing fractional-order lead/lag compensators. AEU-Int. J. Electron. Commun. 2020, 120, 153203. [Google Scholar] [CrossRef]
- Nako, J.; Psychalinos, C.; Elwakil, A.S.; Minaei, S. Non-Integer Order Generalized Filters Designs. IEEE Access 2023, 11, 116846–116859. [Google Scholar] [CrossRef]
- Sladok, O.; Koton, J.; Kubanek, D.; Dvorak, J.; Psychalinos, C. Pseudo-differential (2+ α)-order Butterworth frequency filter. IEEE Access 2021, 9, 92178–92188. [Google Scholar] [CrossRef]
- Elwy, O.; Rashad, S.H.; Said, L.A.; Radwan, A.G. Comparison between three approximation methods on oscillator circuits. Microelectron. J. 2018, 81, 162–178. [Google Scholar] [CrossRef]
- Elwy, O.; AbdelAty, A.M.; Said, L.A.; Madian, A.H.; Radwan, A.G. Two implementations of fractional-order relaxation oscillators. Analog Integr. Circuits Signal Process. 2021, 106, 421–432. [Google Scholar] [CrossRef]
- Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. Power law filters: A new class of fractional-order filters without a fractional-order Laplacian operator. AEU-Int. J. Electron. Commun. 2021, 129, 153537. [Google Scholar] [CrossRef]
- Gadallah, S.I.; Ghoneim, M.S.; Elwakil, A.S.; Said, L.A.; Madian, A.H.; Radwan, A.G. Plant Tissue Modelling Using Power-Law Filters. Sensors 2022, 22, 5659. [Google Scholar] [CrossRef] [PubMed]
- Monje, C.A.; Calderon, A.J.; Vinagre, B.M.; Feliu, V. The fractional order lead compensator. In Proceedings of the Second IEEE International Conference on Computational Cybernetics, Vienna, Austria, 30 August–1 September 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 347–352. [Google Scholar]
- Dogruer, T.; Tan, N. Lead and lag controller design in fractional-order control systems. Meas. Control 2019, 52, 1017–1028. [Google Scholar] [CrossRef]
- Kosmas, D.; Schouten, M.; Krijnen, G. Hysteresis Compensation of 3D Printed Sensors by a Power Law Model with Reduced Parameters. In Proceedings of the 2020 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), Manchester, UK, 16–19 August 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Valério, D.; Da Costa, J.S. Introduction to single-input, single-output fractional control. IET Control Theory Appl. 2011, 5, 1033–1057. [Google Scholar] [CrossRef]
- Oprzedkiewicz, K.; Mitkowski, W.; Gawin, E. Application of fractional order transfer functions to modeling of high—Order systems. In Proceedings of the 2015 20th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 24–27 August 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1169–1174. [Google Scholar]
- Ushakov, P.A.; Maksimov, K.O.; Stoychev, S.V.; Gravshin, V.G.; Kubanek, D.; Koton, J. Synthesis of elements with fractional-order impedance based on homogenous distributed resistive-capacitive structures and genetic algorithm. J. Adv. Res. 2020, 25, 275–283. [Google Scholar] [CrossRef]
- Tsouvalas, E.; Kapoulea, S.; Psychalinos, C.; Elwakil, A.S.; Jurišić, D. Electronically Controlled Power-Law Filters Realizations. Fractal Fract. 2022, 6, 111. [Google Scholar] [CrossRef]
- Deniz, F.N.; Alagoz, B.B.; Tan, N.; Atherton, D.P. An integer order approximation method based on stability boundary locus for fractional order derivative/integrator operators. ISA Trans. 2016, 62, 154–163. [Google Scholar] [CrossRef]
- Andrianov, I.; Shatrov, A. Padé Approximants, Their Properties, and Applications to Hydrodynamic Problems. Symmetry 2021, 13, 1869. [Google Scholar] [CrossRef]
- Zourmba, K.; Fischer, C.; Gambo, B.; Effa, J.; Mohamadou, A. Fractional integrator circuit unit using Charef approximation method. Int. J. Dyn. Control 2020, 8, 943–951. [Google Scholar] [CrossRef]
- Das, S.; Pan, I. Basics of fractional order signals and systems. In Fractional Order Signal Processing: Introductory Concepts and Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 13–30. [Google Scholar]
- Chen, Y.; Vinagre, B.M.; Podlubny, I. Continued fraction expansion approaches to discretizing fractional order derivatives—An expository review. Nonlinear Dyn. 2004, 38, 155–170. [Google Scholar] [CrossRef]
- Kapoulea, S. Interdisciplinary Applications of Fractional-Order Circuits. Ph.D. Thesis, University of Glasgow, Glasgow, Scotland, 2022. [Google Scholar]
- Azar, A.T.; Vaidyanathan, S.; Ouannas, A. Fractional Order Control and Synchronization of Chaotic Systems; Springer: Cham, Switzerland, 2017; Volume 688. [Google Scholar]
- Ghali, K.; Dorie, L.; Hammami, O. Dynamically reconfigurable analog circuit design automation through multiobjective optimization and direct execution. In Proceedings of the 2005 International Conference on Microelectronics, Islamabad, Pakistan, 13–15 December 2005; pp. 98–101. [Google Scholar]
- Bertsias, P.; Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. A collection of interdisciplinary applications of fractional-order circuits. In Fractional Order Systems; Academic Press: Cambridge, MA, USA, 2022; pp. 35–69. [Google Scholar]
- Nako, J.; Psychalinos, C.; Elwakil, A.S. A 1+ α Order Generalized Butterworth Filter Structure and Its Field Programmable Analog Array Implementation. Electronics 2023, 12, 1225. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approximation | Error (%) | |||
|---|---|---|---|---|
| = 0.3 | = 0.5 | = 0.7 | = 0.9 | |
| Padé | 8 | 13 | 10 | 10 |
| Charef | 18 | 10 | 2 | 0.3 |
| Carlson | 26 | 16 | 80 | 80 |
| Curve-fitting | 2 | 3 | 7 | 7.5 |
| CFE | 5 | 8 | 5 | 3 |
| Approximation | Error (%) | |||
|---|---|---|---|---|
| = 0.3 | = 0.5 | = 0.7 | = 0.9 | |
| Padé | 62 | 20 | 40 | 19 |
| Charef | 80 | 20 | 18 | 3 |
| Carlson | 80 | 20 | 50 | 80 |
| Curve-fitting | 5 | 4 | 8 | 2 |
| CFE | 1 | 1 | 3 | 1 |
| Approximation | Error (%) | |||
|---|---|---|---|---|
| = 0.3 | = 0.5 | = 0.7 | = 0.9 | |
| Padé | 8 | 14 | 18 | 10 |
| Charef | - | - | - | - |
| Carlson | 26 | 13.5 | 100 | 100 |
| Curve-fitting | 1 | 10 | 18 | 5 |
| CFE | 9 | 13 | 18 | 10 |
| Approximation | Error (%) | |||
|---|---|---|---|---|
| = 0.3 | = 0.5 | = 0.7 | = 0.9 | |
| Padé | 60 | 60 | 48 | 19 |
| Charef | - | - | - | - |
| Carlson | 90 | 63 | 100 | 100 |
| Curve-fitting | 18 | 19 | 8 | 1 |
| CFE | 60 | 60 | 48 | 32 |
| Approximation | Error (%) | |||
|---|---|---|---|---|
| = 0.3 | = 0.5 | = 0.7 | = 0.9 | |
| Padé | 0.1 | 0.001 | 0 | 0 |
| Carlson | 9 | 0.001 | 9 | 50 |
| Curve-fitting | 0.1 | 0 | 0 | 0 |
| CFE | 0.1 | 0.001 | 0.01 | 0 |
| Approximation | Error (%) | |||
|---|---|---|---|---|
| = 0.3 | = 0.5 | = 0.7 | = 0.9 | |
| Padé | 0.03 | 0.019 | 0.01 | 0 |
| Carlson | 0.001 | 0 | 10 | 80 |
| Curve-fitting | 0 | 0 | 0 | 0 |
| CFE | 0.01 | 0.009 | 0.005 | 0 |
| Time Constants | Scaling Factors | |||||
|---|---|---|---|---|---|---|
| 0.03 | 0.218 | 1.109 | 1 | 0.551 | 0.232 | 0.057 |
| Scaling Factors | Time Constants | ||
|---|---|---|---|
| Variable | Value | Variable | Value |
| 0.057 | |||
| 0.144 | 0.035 | ||
| 0.29 | 0.246 | ||
| 0.509 | 0.828 | ||
| Scaling Factors | Time Constants | ||
|---|---|---|---|
| Variable | Value | Variable | Value |
| 0.058 | |||
| 0.138 | 0.037 | ||
| 0.238 | 0.208 | ||
| 0.561 | 0.762 | ||
| Scaling Factors | Time Constants | ||
|---|---|---|---|
| Variable | Value | Variable | Value |
| G | 0.138 | f | 4.275 |
| G | 0.238 | f | 0.767 |
| G | 0.561 | f | 0.208 |
| Approximation | Case (1): Denominator | Case (2): Compensator |
|---|---|---|
| Padé | ✓ | ✓ |
| Charef | ✓ | X |
| Carlson | ✓ | ✓ |
| Curve-fitting | ✓ | ✓ |
| CFE | ✓ | ✓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Emad, S.; Hassanein, A.M.; AbdelAty, A.M.; Madian, A.H.; Radwan, A.G.; Said, L.A. A Study on Fractional Power-Law Applications and Approximations. Electronics 2024, 13, 591. https://doi.org/10.3390/electronics13030591
Emad S, Hassanein AM, AbdelAty AM, Madian AH, Radwan AG, Said LA. A Study on Fractional Power-Law Applications and Approximations. Electronics. 2024; 13(3):591. https://doi.org/10.3390/electronics13030591
Chicago/Turabian StyleEmad, Salma, Ahmed M. Hassanein, Amr M. AbdelAty, Ahmed H. Madian, Ahmed G. Radwan, and Lobna A. Said. 2024. "A Study on Fractional Power-Law Applications and Approximations" Electronics 13, no. 3: 591. https://doi.org/10.3390/electronics13030591
APA StyleEmad, S., Hassanein, A. M., AbdelAty, A. M., Madian, A. H., Radwan, A. G., & Said, L. A. (2024). A Study on Fractional Power-Law Applications and Approximations. Electronics, 13(3), 591. https://doi.org/10.3390/electronics13030591